JP4340407B2 - 多関節ロボットの動作経路探索方法および装置 - Google Patents
多関節ロボットの動作経路探索方法および装置 Download PDFInfo
- Publication number
- JP4340407B2 JP4340407B2 JP2001289664A JP2001289664A JP4340407B2 JP 4340407 B2 JP4340407 B2 JP 4340407B2 JP 2001289664 A JP2001289664 A JP 2001289664A JP 2001289664 A JP2001289664 A JP 2001289664A JP 4340407 B2 JP4340407 B2 JP 4340407B2
- Authority
- JP
- Japan
- Prior art keywords
- search
- time
- path
- operation path
- work
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






Landscapes
- Numerical Control (AREA)
- Manipulator (AREA)
Description
【発明の属する技術分野】
本発明は、複数の作業点に対する多関節ロボットの動作経路を探索する動作経路探索方法および装置に関する。
【0002】
【従来の技術】
従来、製造ラインに設置された多関節ロボットを直接操作させて作業姿勢のティーチングを行おうとすると、多関節ロボットの操作を熟知したオペレータが製造ラインの現場で作業を行わなければならないため、その分、作業が非効率的となってしまう。また、このような作業は、製造ラインを停止させた状態で行う必要があるため、当該製造ラインの稼働率も低下してしまう。
【0003】
そこで、近時、前記ティーチング作業の効率化を図るため、あるいは、前記製造ラインの稼働率を向上させるために、オフラインによるティーチングが行われている。すなわち、コンピュータ上に多関節ロボット並びに作業対象物であるワークおよび周辺構造物のモデルを構築し、このモデルを用いてティーチングデータを作成した後、前記ティーチングデータを現場の多関節ロボットに供給することにより、製造ラインを停止させることなく、ティーチングデータを効率的に作成することが可能となる。
【0004】
ところで、このようなオフライティーチングにおいては、例えば、オペレータが複数の作業点を指示することにより、周辺構造物や多関節ロボットの仕様を考慮して、コンピュータが多関節ロボットの動作経路を自動計算することも可能になってきている。
【0005】
しかしながら、動作経路の自動計算が可能であるとはいっても、モデルの設定が不適切であった場合のように、適切な条件が設定されていないと、動作経路の解が得られなかったり、あるいは、1つの作業点に対する処理に相当な時間を要し、限られた時間内で動作経路を算出できない、といった不具合が指摘されている。従って、例えば、夜間や休日におけるコンピュータの十分な空き時間を利用して無人で動作経路の自動計算を行わせたとしても、必ずしも良好な計算結果が得られるものとは限らない。
【0006】
【発明が解決しようとする課題】
本発明は、上述した不具合を解決するためになされたものであり、多関節ロボットの動作経路の探索を極めて効率的に行うことのできる多関節ロボットの動作経路探索方法および装置を提供することを目的とする。
【0007】
【課題を解決するための手段】
前記の課題を解決するために、本発明方法では、複数の作業点に対する多関節ロボットの動作経路を探索する動作経路探索方法において、
各作業点に係る動作経路の探索に割り当てる探索割当時間を設定するステップと、
前記各作業点の前記動作経路を探索するステップと、
前記動作経路の探索に係る探索開始からの探索経過時間を計測するステップと、
前記探索経過時間を、前記動作経路の探索に係る当該作業点に割り当てられた前記探索割当時間を探索開始からの前記各作業点の前記探索割当時間に累積した累積探索割当時間と比較するステップと、
前記探索経過時間が前記累積探索割当時間を超過した際、当該作業点に係る動作経路の探索を中断し、次の作業点に係る探索に移行するステップと、
からなることを特徴とする。
【0008】
この場合、動作経路の探索に要した探索経過時間が累積探索割当時間を超過した際、その作業点に対する探索を中断し、次の作業点に対する動作経路の探索を行うため、累積探索割当時間内で探索の完了する作業点の動作経路を効率的に算出することができる。また、前段の作業点に対する動作経路の探索が累積探索割当時間内で完了した場合、次の作業点の探索に与えられる探索割当時間が増加することになるため、当該作業点の動作経路を探索できる確率が増大する。
【0009】
なお、複数の前記作業点に係る前記動作経路の探索に割り当てる複数作業点探索割当時間を設定し、複数の前記作業点に対する探索が終了した後、前記探索経過時間から前記複数作業点探索割当時間に対する探索残り時間を演算し、探索を中断した当該作業点に対する前記動作経路の探索を前記探索残り時間において行うことにより、与えられた前記複数作業点探索割当時間内で動作経路をさらに効率的に探索することができる。
【0010】
上記の探索は、各作業点の動作経路の探索を構成する複数のプロセス処理に対してそれぞれ探索割当時間を設定し、各プロセス処理毎に行うことができる。
【0011】
また、本発明装置では、複数の作業点に対する多関節ロボットの動作経路を探索する動作経路探索装置において、
各作業点に係る動作経路の探索に割り当てる探索割当時間を設定し、探索スケジュールを決定する探索スケジュール設定部と、
前記各作業点の前記動作経路を探索する動作経路探索部と、
前記動作経路の探索に係る探索開始からの探索経過時間を計測する経過時間計測部と、
前記探索経過時間を、前記動作経路の探索に係る当該作業点に割り当てられた前記探索割当時間を探索開始からの前記各作業点の前記探索割当時間に累積した累積探索割当時間と比較して判定する経過時間比較判定部と、
前記探索経過時間が前記累積探索割当時間を超過した際、当該作業点に係る動作経路の探索を中断し、次の作業点に係る探索に移行する処理を行う探索処理制御部と、
を備えることを特徴とする。
【0012】
【発明の実施の形態】
図1は、本発明の多関節ロボットの動作経路探索方法および装置が適用される実施形態であるオフラインティーチング装置10と、このオフラインティーチング装置10によって作成されたティーチングデータが適用される多関節ロボット装置12との概略構成を示す。
【0013】
多関節ロボット装置12は、ベース14に対して複数の回動自在なリンク16、18および20を介して連結される溶接ガン等のエンドエフェクタ22を備え、ロボット制御部24に設定されたティーチングデータに従って動作する。なお、多関節ロボット装置12およびロボット制御部24は、現場の製造ラインに配設される。
【0014】
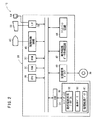
オフラインティーチング装置10は、コンピュータによって構成されるものであり、図2に示すように、制御部26は、オフラインティーチング装置10の全体の制御を行うCPU28と、記憶部であるROM30およびRAM32と、ハードディスクドライブ34によってデータが読み書きされるハードディスク36と、フレキシブルディスクやコンパクトディスク等の外部記録媒体38に対してデータの読み書きを行う記録媒体ドライブ40と、多関節ロボット装置12の動作経路データを作成する動作経路データ作成回路42と、作成された動作経路データに基づいて多関節ロボット装置12の動作シミュレーションを行うシミュレーション回路44とを備える。なお、制御部26には、オペレータによるティーチング作業の補助、シミュレーション画像の表示等を行うためのディスプレイ46が描画制御回路48を介して接続されるとともに、インタフェース50を介してキーボード52およびマウス54が接続される。
【0015】
ハードディスク36には、多関節ロボット装置12の動作経路データを作成するための動作経路作成プログラム56と、動作経路データを作成するための条件データ58と、動作経路データの作成時に生成される処理結果データ60とが格納される。
【0016】
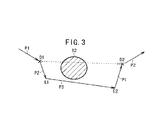
動作経路作成プログラム56は、図3に示すように、オペレータによって指示された所望の打点(作業点)D1、D2、…に対して多関節ロボット装置12のエンドエフェクタ22を到着させる経路を探索するプロセス処理P1、打点D1、D2、…からエンドエフェクタ22を引き抜く経路を探索するプロセス処理P2、干渉物62を回避しながら中継点E1、E2間を移動させる経路を探索するプロセス処理P3、および、探索された複数の経路からエンドエフェクタ22の姿勢、移動時間等に係る最適な経路を探索するプロセス処理P4(図示せず)の各処理を行うことにより、所望の動作経路データを作成するプログラムである。
【0017】
条件データ58は、図4に示すように、工程別打点探索割当時間データ、プロセス処理探索割当時間データ、打点データ、打順データおよびプロセス処理優先度データを有する。
【0018】
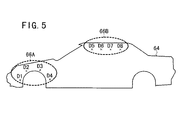
工程別打点探索割当時間データは、例えば、図5に示すように、ワーク64に設定される複数の打点D1〜D8を動作経路データ作成の難易度に応じた工程66A、66Bにグループ化し、各工程66A、66B毎に1打点の各プロセス処理P1〜P4を行うために割り当てられる打点探索割当時間TA、TBである。
【0019】
プロセス処理探索割当時間データは、例えば、図6に示すように、各打点での探索を構成するプロセス処理P1〜P4に対して割り当てられるプロセス処理探索割当時間t1〜t4であり、本実施形態では、工程66Aに対し、
TA=t1+t2+t3+t4
として設定される。なお、このプロセス処理探索割当時間t1〜t4は、打点探索割当時間TA、TBを各プロセス処理P1〜P4に配分するための比率として設定することもできる。
【0020】
打点データは、打点D1、D2、…におけるエンドエフェクタ22の姿勢および座標に係るデータである。打順データは、各打点D1、D2、…に対する動作経路の探索順序を設定するデータである。プロセス処理優先度データは、プロセス処理P1〜P4の処理順を設定するデータである。本実施形態では、プロセス処理P1〜P4の順で処理を行うものとする。
【0021】
処理結果データ60は、図7に示すように、処理実績データおよび動作経路データからなる。処理実績データは、探索した動作経路の工程、打点数、中断時の探索に要した時間、中断されたプロセス処理等のデータである。動作経路データは、探索された動作経路のデータである。
【0022】
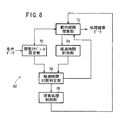
動作経路データ作成回路42は、図8に示すように、条件データに基づき動作経路を探索するための探索スケジュールを設定する探索スケジュール設定部70と、設定された探索スケジュールに従って動作経路の探索を行い、処理結果データを出力する動作経路探索部72と、探索開始からの経過時間を計測する経過時間計測部74と、探索スケジュール設定部70で設定された累積探索割当時間(後述)と経過時間計測部74で計測された経過時間とを比較し、時間超過の有無を判定する経過時間比較判定部76と、経過時間比較判定部76で時間超過と判定された際、当該打点での探索を中断し、動作経路探索部72に対して次の打点に対する探索を指示する探索処理制御部78とを備える。
【0023】
本実施形態のオフラインティーチング装置10は、基本的には以上のように構成されるものであり、次に、その動作について図9および図10に示すフローチャートに従って説明する。
【0024】
動作経路の探索に先立ち、ハードディスク36から動作経路作成プログラム56を読み込み、動作経路データ作成回路42にロードする。次いで、動作経路データ作成回路42の探索スケジュール設定部70は、条件データ58である工程別打点探索割当時間データおよびプロセス処理探索割当時間データを読み込むとともに(ステップS1)、打点データ、打順データおよびプロセス処理優先度データを読み込み(ステップS2)、探索スケジュールの設定を行う。
【0025】
先ず、打順データおよびプロセス処理優先度データに従い、探索順序を設定する(ステップS3)。
【0026】
次に、工程別打点探索割当時間データと打順データとを用いて、各工程66A、66B(図5参照)別に打順に従った打点D1〜DN毎の打点累積探索割当時間H1〜HNを設定する(ステップS4)。Nは、各工程66A、66Bの打点数を表す。この場合、工程66A、66Bの打点探索割当時間をTA、TBとすると、工程66Aの打点累積探索割当時間H1〜HNは、
H1=TA
H2=2・TA
……
HN=N・TA
として設定され、工程66Bの打点累積探索割当時間H1〜HNは、
H1=TB
H2=2・TB
……
HN=N・TB
として設定される。図11における点線は、各打点D1〜DNに割り当てられた打点累積探索割当時間H1〜HNを示している。
【0027】
次に、プロセス処理探索割当時間データを用いてプロセス処理累積探索割当時間h11〜h14、h21〜h24、…、hN1〜hN4を設定する(ステップS5)。例えば、hN1〜hN4は、打点DNの各プロセス処理P1〜P4に対する累積探索割当時間を表す。この場合、工程66Aでの各打点D1〜DNのプロセス処理累積探索割当時間h11〜h14、h21〜h24、…、hN1〜hN4は、各プロセス処理P1〜P4でのプロセス処理探索割当時間データであるプロセス処理探索割当時間をt1〜t4として、
h11=t1
h12=h11+t2
h13=h12+t3
h14=h13+t4=TA
……
hN1=h(N−1)1+t1
hN2=hN1+t2
hN3=hN2+t3
hN4=hN3+t4=N・TA
として設定される。工程66Bでの各打点D1〜DNのプロセス処理累積探索割当時間h11〜h14、h21〜h24、…、hN1〜hN4についても同様である。
【0028】
以上のようにして探索スケジュールを設定した後、経過時間計測部74が探索経過時間Hの計測を開始し(ステップS6)、動作経路探索部72による動作経路の探索が開始される(ステップS7)。動作経路探索部72は、ステップS3で設定した探索順序に従い、打点D1のプロセス処理P1から動作経路の探索を開始する。
【0029】
一方、経過時間比較判定部76は、探索スケジュール設定部70で設定した打点D1のプロセス処理P1に対するプロセス処理累積探索割当時間h11と、経過時間計測部74によって計測された探索経過時間Hとを逐次比較する(ステップS8)。
【0030】
H<h11の範囲でプロセス処理P1(エンドエフェクタ22を打点D1に到着させる動作経路の探索)が終了すると(ステップS9)、打点D1の次のプロセス処理P2(エンドエフェクタ22を打点D1から引き抜く動作経路の探索)に移行する(ステップS10、S7)。この場合、プロセス処理P2に与えられるプロセス処理探索割当時間t2には、プロセス処理P1で余った時間(h11−H)が加算されるため、プロセス処理P2がより確実に遂行されることが期待される。
【0031】
一方、プロセス処理P1〜P4のいずれかにおいて、探索経過時間Hがプロセス処理累積探索割当時間h11〜h14を超過したとき(ステップS9)、探索処理制御部78は、当該打点D1の探索を中断し(ステップS11)、次の打点D2に対する探索を動作経路探索部72に対して指示する(ステップS12)。なお、ステップS10において、当該打点D1の全てのプロセス処理P1〜P4が完了したときも同様に、次の打点D2に対する探索を動作経路探索部72に対して指示する。
【0032】
次の打点D2が指示された後、動作経路探索部72は、処理結果データ60をハードディスク36に記録する(ステップS13)。例えば、プロセス処理P1での動作経路が探索された場合には、その動作経路データが処理結果データ60として記録される。また、プロセス処理P2での動作経路の探索が中断された場合には、プロセス処理P2が中断されたことを示すデータと、中断されるまでに得られた途中経過処理データとからなる処理実績データが処理結果データ60として記録される。
【0033】
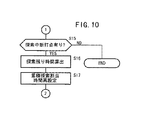
以上の処理を工程66Aを構成する全ての打点DNに対して繰り返し、探索中断の有無に拘わらず打点DNまでの探索が完了すると(ステップS14)、探索スケジュール設定部70は、処理結果データ60に基づいて探索中断打点の有無を判定し(ステップS15)、中断があった場合には、探索スケジュールの再設定を行う。
【0034】
すなわち、探索スケジュール設定部70は、探索中断打点があった場合、ステップS4で求めた打点DNでの打点累積探索割当時間HN(複数作業点探索割当時間)から、最後の打点DNに対する探索が完了した時点での探索経過時間Hを差し引き、これを探索残り時間(HN−H)として設定する(ステップS16)。
【0035】
次いで、探索スケジュール設定部70は、例えば、図11の○で示すように、打点D3において探索が中断されており、処理結果データ60から得られる打点D3での中断の内容が、図6のハッチングで示すように、プロセス処理P1が終了し、プロセス処理P2が中断され、且つ、プロセス処理P2に続くプロセス処理P3およびP4の処理に至っていない場合、プロセス処理P2〜P4に対して探索残り時間(HN−H)を割り振り、プロセス処理累積探索割当時間h32〜h34を再設定する(ステップS17)。
【0036】
なお、探索残り時間(HN−H)を割り振り方法としては、例えば、探索が全く行われていないプロセス処理P3およびP4に対しては、プロセス処理探索割当時間t3およびt4を割り振り、プロセス処理P2に対しては、プロセス処理探索割当時間(HN−H−t3−t4)を割り振るようにすることができる。また、中断された打点が複数ある場合には、各打点に対して探索残り時間(HN−H)を割り振るようにしてもよい。
【0037】
以上のようにして探索スケジュールを再設定した後、ステップS7からの処理を繰り返すことにより、与えられた打点累積探索割当時間HN内で動作経路を効率的に探索することができる。なお、工程66Bについても、同様にして動作経路の探索を行うことができる。
【0038】
多関節ロボット装置12の動作経路の探索が完了し、全ての動作経路データが処理結果データ60としてハードディスク36に設定された後、シミュレーション回路44は、動作経路データを用いて多関節ロボット装置12の動作シミュレーションを行う。シミュレーションによって動作の確認された動作経路データは、記録媒体ドライブ40を介して外部記録媒体38に記録された後、多関節ロボット装置12を構成するロボット制御部24にダウンロードされ、多関節ロボット装置12の制御に供される。
【0039】
【発明の効果】
以上のように、本発明によれば、各作業点に係る動作経路を探索し、与えられた探索割当時間内で探索が終了しない場合には、その作業点に対する探索を中断して次の作業点に対する探索に移行し、探索割当時間内で探索が終了した場合には、残りの時間を次の作業点に対する探索割当時間に加算して探索を行うため、探索割当時間を無駄なく使用して動作経路を効率的に探索することができる。
【0040】
また、複数の作業点に対する探索処理が与えられた時間内で終了した場合に、その残り時間を探索を中断した作業点に割り振り、再度動作経路の探索を行うことより、より多くの作業点に対する動作経路の探索を与えられた探索割当時間内で効率的に行うことができる。
【図面の簡単な説明】
【図1】本実施形態のオフラインティーチング装置および多関節ロボット装置の概略構成図である。
【図2】本実施形態のオフラインティーチング装置の回路構成図である。
【図3】プロセス処理の説明図である。
【図4】本実施形態のオフラインティーチング装置で設定される条件データの説明図である。
【図5】本実施形態のオフラインティーチング装置で設定されるティーチングデータを分類する工程の説明図である。
【図6】本実施形態のオフラインティーチング装置で設定されるプロセス処理探索割当時間の説明図である。
【図7】本実施形態のオフラインティーチング装置で得られる処理結果データの説明図である。
【図8】本実施形態のオフラインティーチング装置における動作経路データ作成回路のブロック図である。
【図9】本実施形態のオフラインティーチング装置における動作経路探索方法のフローチャートである。
【図10】本実施形態のオフラインティーチング装置における動作経路探索方法のフローチャートである。
【図11】本実施形態のオフラインティーチング装置における各打点に設定された累積探索割当時間と経過時間との関係説明図である。
【符号の説明】
10…オフラインティーチング装置 12…多関節ロボット装置
24…ロボット制御部 26…制御部
36…ハードディスク 42…動作経路データ作成回路
44…シミュレーション回路 56…動作経路作成プログラム
58…条件データ 60…処理結果データ
70…探索スケジュール設定部 72…動作経路探索部
74…経過時間計測部 76…経過時間比較判定部
78…探索処理制御部
Claims (4)
- 複数の作業点に対する多関節ロボットの動作経路を探索する動作経路探索方法において、
各作業点に係る動作経路の探索に割り当てる探索割当時間を設定するステップと、
前記各作業点の前記動作経路を探索するステップと、
前記動作経路の探索に係る探索開始からの探索経過時間を計測するステップと、
前記探索経過時間を、前記動作経路の探索に係る当該作業点に割り当てられた前記探索割当時間を探索開始からの前記各作業点の前記探索割当時間に累積した累積探索割当時間と比較するステップと、
前記探索経過時間が前記累積探索割当時間を超過した際、当該作業点に係る動作経路の探索を中断し、次の作業点に係る探索に移行するステップと、
からなることを特徴とする多関節ロボットの動作経路探索方法。 - 請求項1記載の方法において、
複数の前記作業点に係る前記動作経路の探索に割り当てる複数作業点探索割当時間を設定するステップと、
複数の前記作業点に対する前記動作経路の探索が終了した後、前記探索経過時間から前記複数作業点探索割当時間に対する探索残り時間を演算するステップと、
探索を中断した当該作業点に対する前記動作経路の探索を前記探索残り時間において行うステップと、
からなることを特徴とする多関節ロボットの動作経路探索方法。 - 請求項1記載の方法において、
前記各作業点に対する前記動作経路の探索は、複数のプロセス処理からなり、前記探索割当時間は、前記各プロセス処理に対して設定されることを特徴とする多関節ロボットの動作経路探索方法。 - 複数の作業点に対する多関節ロボットの動作経路を探索する動作経路探索装置において、
各作業点に係る動作経路の探索に割り当てる探索割当時間を設定し、探索スケジュールを決定する探索スケジュール設定部と、
前記各作業点の前記動作経路を探索する動作経路探索部と、
前記動作経路の探索に係る探索開始からの探索経過時間を計測する経過時間計測部と、
前記探索経過時間を、前記動作経路の探索に係る当該作業点に割り当てられた前記探索割当時間を探索開始からの前記各作業点の前記探索割当時間に累積した累積探索割当時間と比較して判定する経過時間比較判定部と、
前記探索経過時間が前記累積探索割当時間を超過した際、当該作業点に係る動作経路の探索を中断し、次の作業点に係る探索に移行する処理を行う探索処理制御部と、
を備えることを特徴とする多関節ロボットの動作経路探索装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001289664A JP4340407B2 (ja) | 2001-09-21 | 2001-09-21 | 多関節ロボットの動作経路探索方法および装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001289664A JP4340407B2 (ja) | 2001-09-21 | 2001-09-21 | 多関節ロボットの動作経路探索方法および装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2003094362A JP2003094362A (ja) | 2003-04-03 |
| JP4340407B2 true JP4340407B2 (ja) | 2009-10-07 |
Family
ID=19112124
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2001289664A Expired - Fee Related JP4340407B2 (ja) | 2001-09-21 | 2001-09-21 | 多関節ロボットの動作経路探索方法および装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4340407B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7726845B2 (ja) * | 2022-06-10 | 2025-08-20 | 株式会社神戸製鋼所 | ロボットの動作軌道生成方法、動作軌道生成装置、ロボットシステム、およびプログラム |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3040906B2 (ja) * | 1994-01-19 | 2000-05-15 | 本田技研工業株式会社 | ロボットの動作時間評価方法および装置 |
| JP3030007B2 (ja) * | 1997-07-11 | 2000-04-10 | 川崎重工業株式会社 | ロボットによる溶接の順序計画方法および装置 |
| JP3576406B2 (ja) * | 1998-11-06 | 2004-10-13 | 本田技研工業株式会社 | 作業ロボットのレイアウトシミュレーション方法 |
-
2001
- 2001-09-21 JP JP2001289664A patent/JP4340407B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2003094362A (ja) | 2003-04-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN106737662B (zh) | 机器人系统 | |
| EP3015932B1 (en) | Method and means for controlling a robot | |
| KR101581096B1 (ko) | 다관절형 로봇의 제어 장치, 제어 방법 및 제어 프로그램을 기록한 컴퓨터 판독가능한 기록 매체 | |
| JPH09509618A (ja) | 板金曲げ計画の作成・実行用知能システム | |
| US5254923A (en) | Industrial robot synchronous control method and apparatus | |
| CN100460161C (zh) | 机械手控制装置及机械手控制方法 | |
| CN102744727A (zh) | 预测机器人的着眼部位与周边物的干涉的方法及装置 | |
| EP3718702B1 (en) | Programming assistance device, robot system, and programming assistance method | |
| JP2006110702A (ja) | 学習制御機能を備えたロボット及びロボットの制御方法 | |
| CN108326877A (zh) | 机器人控制设备、系统和控制方法及制品装配制造方法 | |
| WO2019064916A1 (ja) | ロボットシミュレータ | |
| JP2010264559A (ja) | ロボットの制御方法 | |
| CN109605378B (zh) | 运动参数的处理方法、装置和系统及存储介质 | |
| JP2019171498A (ja) | ロボットプログラム実行装置、ロボットプログラム実行方法、プログラム | |
| JP4340407B2 (ja) | 多関節ロボットの動作経路探索方法および装置 | |
| JPWO2019064917A1 (ja) | ロボットシミュレータ | |
| CN115781082B (zh) | 一种标准节自动焊接方法、系统、装置和存储介质 | |
| JPH10264058A (ja) | ロボット干渉域設定プログラム作成方法 | |
| JP2006068890A (ja) | 軌道決定システムおよび軌道決定方法 | |
| JP2003094363A (ja) | 多関節ロボットの姿勢決定方法および装置 | |
| US12576529B2 (en) | Robot simulation device | |
| JP2023057024A (ja) | 情報処理装置、情報処理方法、物品の製造方法、プログラム、記録媒体、システム | |
| JP4124583B2 (ja) | 作業ロボットの動作経路データ作成方法および装置 | |
| JP2003117864A (ja) | 多関節ロボットのティーチングデータ作成方法 | |
| JP2019171499A (ja) | ロボットの干渉判定装置、ロボットの干渉判定方法、プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20071128 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20090626 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090630 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090706 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120710 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120710 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130710 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140710 Year of fee payment: 5 |
|
| LAPS | Cancellation because of no payment of annual fees |