JP4298577B2 - 車両用警報装置 - Google Patents
車両用警報装置 Download PDFInfo
- Publication number
- JP4298577B2 JP4298577B2 JP2004137144A JP2004137144A JP4298577B2 JP 4298577 B2 JP4298577 B2 JP 4298577B2 JP 2004137144 A JP2004137144 A JP 2004137144A JP 2004137144 A JP2004137144 A JP 2004137144A JP 4298577 B2 JP4298577 B2 JP 4298577B2
- Authority
- JP
- Japan
- Prior art keywords
- distance
- vehicle
- alarm
- measuring sensor
- distance measuring
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000001514 detection method Methods 0.000 claims description 102
- 238000000034 method Methods 0.000 description 22
- 238000005259 measurement Methods 0.000 description 17
- 238000010586 diagram Methods 0.000 description 12
- 238000013459 approach Methods 0.000 description 11
- 230000005855 radiation Effects 0.000 description 10
- 230000005540 biological transmission Effects 0.000 description 4
- 230000007423 decrease Effects 0.000 description 3
- 230000002123 temporal effect Effects 0.000 description 2
- 230000003247 decreasing effect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
Images




















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q9/00—Arrangement or adaptation of signal devices not provided for in one of main groups B60Q1/00 - B60Q7/00, e.g. haptic signalling
- B60Q9/008—Arrangement or adaptation of signal devices not provided for in one of main groups B60Q1/00 - B60Q7/00, e.g. haptic signalling for anti-collision purposes
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/166—Anti-collision systems for active traffic, e.g. moving vehicles, pedestrians, bikes
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/167—Driving aids for lane monitoring, lane changing, e.g. blind spot detection
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
- G01S2013/9315—Monitoring blind spots
Description
図1は本発明の実施の形態1に係る車両用警報装置(以後、単に「警報装置」と呼ぶ)の構成を示すブロック図である。本実施の形態1に係る警報装置は、車両に取り付けられ、当該車両に接近する物体を検出し、検出した物体が警報対象であるか否かを判定し、その判定結果に基づいて当該車両の運転者に警報を発する警報装置である。
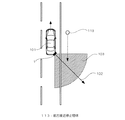
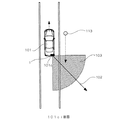
図14は本発明の実施の形態2に係る警報装置における測距センサ1の検知範囲103を示す図である。本実施の形態2に係る警報装置は、上述の実施の形態1に係る警報装置において、測距センサ1の検知範囲103と警報対象判定処理とを変更したものである。
Claims (7)
- 車両の斜め後方の物体と当該車両との距離を検出する測距センサと、
前記車両の運転者の車線変更の意思表示を検出する車線変更検出部と、
前記測距センサで検出された物体が警報対象であるか否かを判定する警報対象判定部と、
前記測距センサで検出された前記距離と、前記警報対象判定部での判定結果と、前記車線変更検出部での検出結果とに基づいて、前記運転者に警報を発する警報発生部と
を備え、
前記警報対象判定部は、ある物体が前記測距センサで継続して検出される際の前記距離の時間変化と、当該物体の前記測距センサでの検出継続時間とに基づいて、当該物体が警報対象であるか否かを判定する、車両用警報装置。 - 請求項1に記載の車両用警報装置であって、
前記警報対象判定部は、
前記測距センサにおいてある物体が継続して検出される際の前記距離が、前記測距センサでの当該ある物体の検出開始時点での前記距離よりも小さくなると、当該ある物体を警報対象であると判定し、
前記ある物体が継続して検出される際の前記距離が、前記ある物体の検出開始時点での前記距離以上の場合には、前記検出継続時間がしきい値時間よりも小さいときには前記ある物体を警報対象でないと判定し、大きくなると前記ある物体を警報対象であると判定する、車両用警報装置。 - 請求項1に記載の車両用警報装置であって、
前記警報対象判定部は、
前記測距センサにおいてある物体が継続して検出される際の前記距離が、前記測距センサでの当該ある物体の検出開始時点での前記距離から所定距離を差し引いた値よりも小さくなると、当該ある物体を警報対象であると判定し、
前記ある物体が継続して検出される際の前記距離が、前記ある物体の検出開始時点での前記距離から所定距離を差し引いた値よりも大きい場合には、前記検出継続時間がしきい値時間よりも小さいときには前記ある物体を警報対象でないと判定し、大きくなると前記ある物体を警報対象であると判定する、車両用警報装置。 - 請求項2及び請求項3のいずれか一つに記載の車両用警報装置であって、
前記車両の車速を検出する車速センサを更に備え、
前記警報対象判定部は、前記車速センサで検出された前記車両の車速に基づいて前記しきい値時間を設定する、車両用警報装置。 - 請求項1乃至請求項4のいずれか一つに記載の車両用警報装置であって、
前記測距センサは前記車両のコーナー部に設けられている、車両用警報装置。 - 請求項1乃至請求項4のいずれか一つに記載の車両用警報装置であって、
前記測距センサは前記車両の側面に設けられている、車両用警報装置。 - 請求項1乃至請求項4のいずれか一つに記載の車両用警報装置であって、
前記測距センサは前記車両の後面に設けられている、車両用警報装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004137144A JP4298577B2 (ja) | 2004-05-06 | 2004-05-06 | 車両用警報装置 |
| US10/956,083 US7346453B2 (en) | 2004-05-06 | 2004-10-04 | Alarm device for vehicle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004137144A JP4298577B2 (ja) | 2004-05-06 | 2004-05-06 | 車両用警報装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2005319827A JP2005319827A (ja) | 2005-11-17 |
| JP2005319827A5 JP2005319827A5 (ja) | 2007-01-18 |
| JP4298577B2 true JP4298577B2 (ja) | 2009-07-22 |
Family
ID=35238959
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004137144A Expired - Fee Related JP4298577B2 (ja) | 2004-05-06 | 2004-05-06 | 車両用警報装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US7346453B2 (ja) |
| JP (1) | JP4298577B2 (ja) |
Families Citing this family (31)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4518080B2 (ja) * | 2007-01-09 | 2010-08-04 | トヨタ自動車株式会社 | 周辺監視装置 |
| US9495386B2 (en) | 2008-03-05 | 2016-11-15 | Ebay Inc. | Identification of items depicted in images |
| US10936650B2 (en) | 2008-03-05 | 2021-03-02 | Ebay Inc. | Method and apparatus for image recognition services |
| DE102008038365A1 (de) * | 2008-07-02 | 2010-01-07 | Adc Automotive Distance Control Systems Gmbh | Fahrzeug-Radarsystem und Verfahren zur Bestimmung einer Position zumindest eines Objekts relativ zu einem Fahrzeug |
| JP2010204033A (ja) * | 2009-03-05 | 2010-09-16 | Fuji Heavy Ind Ltd | 車両用レーダ装置 |
| WO2010115418A2 (de) | 2009-04-06 | 2010-10-14 | Conti Temic Microelectronic Gmbh | Radarsystem mit anordnungen und verfahren zur entkopplung von sende- und empfangssignalen sowie unterdrückung von störeinstrahlungen |
| JP5375752B2 (ja) * | 2009-07-15 | 2013-12-25 | 日産自動車株式会社 | 車両運転支援装置 |
| US9164577B2 (en) | 2009-12-22 | 2015-10-20 | Ebay Inc. | Augmented reality system, method, and apparatus for displaying an item image in a contextual environment |
| US20110291874A1 (en) * | 2010-06-01 | 2011-12-01 | De Mersseman Bernard | Vehicle radar system and method for detecting objects |
| DE102011078641A1 (de) * | 2011-07-05 | 2013-01-10 | Robert Bosch Gmbh | Radarsystem für Kraftfahrzeuge sowie Kraftfahrzeug mit einem Radarsystem |
| CN103999138B (zh) * | 2011-09-26 | 2015-06-17 | 丰田自动车株式会社 | 后侧方接近警报装置 |
| US9449342B2 (en) | 2011-10-27 | 2016-09-20 | Ebay Inc. | System and method for visualization of items in an environment using augmented reality |
| US9240059B2 (en) | 2011-12-29 | 2016-01-19 | Ebay Inc. | Personal augmented reality |
| JP5605395B2 (ja) * | 2012-06-08 | 2014-10-15 | 株式会社デンソー | 車両判定装置、及び、プログラム |
| JP2014002012A (ja) * | 2012-06-18 | 2014-01-09 | Denso Corp | レーダ装置、及び、プログラム |
| US10846766B2 (en) | 2012-06-29 | 2020-11-24 | Ebay Inc. | Contextual menus based on image recognition |
| FR2993845B1 (fr) * | 2012-07-25 | 2014-08-15 | Peugeot Citroen Automobiles Sa | Systeme d’assistance au changement de voie pour un vehicule |
| CN104508720B (zh) | 2012-08-01 | 2016-09-07 | 丰田自动车株式会社 | 驾驶辅助装置 |
| EP2972467B1 (en) * | 2013-03-15 | 2020-02-19 | Veoneer US, Inc. | Vehicle radar system with blind spot detection |
| US9552732B2 (en) * | 2014-04-02 | 2017-01-24 | Robert Bosch Gmbh | Driver assistance system including warning sensing by vehicle sensor mounted on opposite vehicle side |
| US20160252610A1 (en) * | 2015-02-26 | 2016-09-01 | Delphi Technologies, Inc. | Blind-spot radar system with improved semi-trailer tracking |
| WO2016151950A1 (ja) | 2015-03-20 | 2016-09-29 | 日本電気株式会社 | 監視システム、監視方法および監視プログラム |
| DE102015214894A1 (de) | 2015-08-05 | 2017-02-09 | Volkswagen Aktiengesellschaft | Verfahren zur Freigabe einer Rückmeldungsfunktion eines Umfelderkennungssystems eines Fortbewegungsmittels |
| DE102015119658A1 (de) * | 2015-11-13 | 2017-05-18 | Valeo Schalter Und Sensoren Gmbh | Verfahren zum Erfassen eines Umgebungsbereichs eines Kraftfahrzeugs mit Objektklassifizierung, Steuereinrichtung, Fahrerassistenzsystem sowie Kraftfahrzeug |
| DE102015222884A1 (de) | 2015-11-19 | 2017-05-24 | Conti Temic Microelectronic Gmbh | Radarsystem mit verschachtelt seriellem Senden und parallelem Empfangen |
| KR102569539B1 (ko) * | 2016-11-07 | 2023-08-24 | 주식회사 에이치엘클레무브 | 차량용 물체감지시스템 및 차량용 물체감지방법 |
| JP7054327B2 (ja) * | 2017-09-01 | 2022-04-13 | 株式会社デンソー | 走行支援装置 |
| CN111179636B (zh) * | 2020-01-02 | 2021-06-25 | 北京汽车集团有限公司 | 一种超车预警方法及装置 |
| US11450190B2 (en) * | 2020-04-20 | 2022-09-20 | The Boeing Company | Proximity detection to avoid nearby subjects |
| CN111891135B (zh) * | 2020-06-29 | 2022-06-03 | 东风商用车有限公司 | 一种盲区内多车频繁报警控制方法 |
| US11887481B2 (en) * | 2021-06-30 | 2024-01-30 | Volvo Car Corporation | Rear view collision warning indication and mitigation |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS54118036A (en) | 1978-03-03 | 1979-09-13 | Nippon Denso Co Ltd | Reckless overtaking alarming method and its device |
| JPH08293099A (ja) | 1995-04-20 | 1996-11-05 | Nissan Motor Co Ltd | 車間距離警報装置 |
| US6119067A (en) * | 1998-02-19 | 2000-09-12 | Honda Giken Kogyo Kabushiki Kaisha | Object detecting system for conveyance, etc. |
| JP2000233699A (ja) | 1999-02-17 | 2000-08-29 | Sumitomo Electric Ind Ltd | 物体検出装置 |
| US6434486B1 (en) * | 2000-08-28 | 2002-08-13 | Delphi Technologies Inc. | Technique for limiting the range of an object sensing system in a vehicle |
| JP2002274303A (ja) | 2001-03-15 | 2002-09-25 | Nissan Motor Co Ltd | 車両用警報装置 |
| US6590495B1 (en) * | 2001-12-11 | 2003-07-08 | Iraj Behbehani | Automobile distance warning and alarm system |
| JP2004086523A (ja) * | 2002-08-27 | 2004-03-18 | Suzuki Motor Corp | 車両用警戒情報提供装置 |
| JP3672914B2 (ja) * | 2003-01-24 | 2005-07-20 | 三菱電機株式会社 | 車両用警報装置 |
| US6865138B1 (en) * | 2004-01-22 | 2005-03-08 | Shih-Hsiung Li | Back-up detecting device with a distance reset capability |
-
2004
- 2004-05-06 JP JP2004137144A patent/JP4298577B2/ja not_active Expired - Fee Related
- 2004-10-04 US US10/956,083 patent/US7346453B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US7346453B2 (en) | 2008-03-18 |
| US20050248445A1 (en) | 2005-11-10 |
| JP2005319827A (ja) | 2005-11-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4298577B2 (ja) | 車両用警報装置 | |
| JP4765566B2 (ja) | 運転行動評価装置 | |
| RU2564268C1 (ru) | Устройство помощи при вождении | |
| US10901078B2 (en) | Monitoring device and monitoring method | |
| CN108622091A (zh) | 碰撞避免装置 | |
| JP5573617B2 (ja) | 危険度算出装置 | |
| US20120101711A1 (en) | Collision Warning Apparatus | |
| JP4528999B2 (ja) | 追突防止装置 | |
| JP5024255B2 (ja) | 運転支援装置 | |
| WO2018110402A1 (ja) | 先行車両の走行軌跡予測装置及びその搭載車両 | |
| JP2007279892A (ja) | 衝突予知システムの制御装置、衝突予知方法および乗員保護システム | |
| JP2008308024A (ja) | 衝突軽減装置 | |
| JPH1194946A (ja) | 車両用障害物認識装置 | |
| JP2009536132A (ja) | 複雑な交通状況における車両の速度制御方法 | |
| JP7150247B2 (ja) | 車両用警報システム | |
| JP2007004711A (ja) | 車両用進路推定装置 | |
| JP4952938B2 (ja) | 車両の走行支援装置 | |
| JP3672914B2 (ja) | 車両用警報装置 | |
| JP5077183B2 (ja) | 衝突防止装置 | |
| JP2019211929A (ja) | 車両用警報システム | |
| JP2017054441A (ja) | 警報制御装置 | |
| JP2009067334A (ja) | 車両安全装置 | |
| JP2008262446A (ja) | 運転支援装置 | |
| EP3745157B1 (en) | Method for detecting non-visible vehicles and system thereof | |
| JP2007073011A (ja) | 運転状態推定装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20061129 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20061129 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20080718 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080729 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20080909 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090414 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090415 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4298577 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120424 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120424 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130424 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130424 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140424 Year of fee payment: 5 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |