JP4263448B2 - 車両の差動制限制御装置 - Google Patents
車両の差動制限制御装置 Download PDFInfo
- Publication number
- JP4263448B2 JP4263448B2 JP2002278130A JP2002278130A JP4263448B2 JP 4263448 B2 JP4263448 B2 JP 4263448B2 JP 2002278130 A JP2002278130 A JP 2002278130A JP 2002278130 A JP2002278130 A JP 2002278130A JP 4263448 B2 JP4263448 B2 JP 4263448B2
- Authority
- JP
- Japan
- Prior art keywords
- differential
- rotational speed
- clutch
- rotation speed
- actual
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K17/00—Arrangement or mounting of transmissions in vehicles
- B60K17/34—Arrangement or mounting of transmissions in vehicles for driving both front and rear wheels, e.g. four wheel drive vehicles
- B60K17/344—Arrangement or mounting of transmissions in vehicles for driving both front and rear wheels, e.g. four wheel drive vehicles having a transfer gear
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K17/00—Arrangement or mounting of transmissions in vehicles
- B60K17/04—Arrangement or mounting of transmissions in vehicles characterised by arrangement, location, or kind of gearing
- B60K17/16—Arrangement or mounting of transmissions in vehicles characterised by arrangement, location, or kind of gearing of differential gearing
- B60K17/20—Arrangement or mounting of transmissions in vehicles characterised by arrangement, location, or kind of gearing of differential gearing in which the differential movement is limited
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K23/00—Arrangement or mounting of control devices for vehicle transmissions, or parts thereof, not otherwise provided for
- B60K23/04—Arrangement or mounting of control devices for vehicle transmissions, or parts thereof, not otherwise provided for for differential gearing
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K23/00—Arrangement or mounting of control devices for vehicle transmissions, or parts thereof, not otherwise provided for
- B60K23/08—Arrangement or mounting of control devices for vehicle transmissions, or parts thereof, not otherwise provided for for changing number of driven wheels, for switching from driving one axle to driving two or more axles
- B60K23/0808—Arrangement or mounting of control devices for vehicle transmissions, or parts thereof, not otherwise provided for for changing number of driven wheels, for switching from driving one axle to driving two or more axles for varying torque distribution between driven axles, e.g. by transfer clutch
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K28/00—Safety devices for propulsion-unit control, specially adapted for, or arranged in, vehicles, e.g. preventing fuel supply or ignition in the event of potentially dangerous conditions
- B60K28/10—Safety devices for propulsion-unit control, specially adapted for, or arranged in, vehicles, e.g. preventing fuel supply or ignition in the event of potentially dangerous conditions responsive to conditions relating to the vehicle
- B60K28/16—Safety devices for propulsion-unit control, specially adapted for, or arranged in, vehicles, e.g. preventing fuel supply or ignition in the event of potentially dangerous conditions responsive to conditions relating to the vehicle responsive to, or preventing, skidding of wheels
- B60K28/165—Safety devices for propulsion-unit control, specially adapted for, or arranged in, vehicles, e.g. preventing fuel supply or ignition in the event of potentially dangerous conditions responsive to conditions relating to the vehicle responsive to, or preventing, skidding of wheels acting on elements of the vehicle drive train other than the propulsion unit and brakes, e.g. transmission, clutch, differential
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/082—Selecting or switching between different modes of propelling
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/085—Changing the parameters of the control units, e.g. changing limit values, working points by control input
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2201/00—Particular use of vehicle brake systems; Special systems using also the brakes; Special software modules within the brake system controller
- B60T2201/14—Electronic locking-differential
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W2050/0001—Details of the control system
- B60W2050/0002—Automatic control, details of type of controller or control system architecture
- B60W2050/0008—Feedback, closed loop systems or details of feedback error signal
- B60W2050/001—Proportional integral [PI] controller
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W2050/0001—Details of the control system
- B60W2050/0002—Automatic control, details of type of controller or control system architecture
- B60W2050/0008—Feedback, closed loop systems or details of feedback error signal
- B60W2050/0011—Proportional Integral Differential [PID] controller
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W2050/0001—Details of the control system
- B60W2050/0019—Control system elements or transfer functions
- B60W2050/0022—Gains, weighting coefficients or weighting functions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W2050/0062—Adapting control system settings
- B60W2050/0063—Manual parameter input, manual setting means, manual initialising or calibrating means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/10—Longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/12—Lateral speed
- B60W2520/125—Lateral acceleration
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/26—Wheel slip
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/26—Wheel slip
- B60W2520/263—Slip values between front and rear axle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/215—Selection or confirmation of options
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/02—Clutches
- B60W2710/025—Clutch slip, i.e. difference between input and output speeds
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/02—Clutches
- B60W2710/027—Clutch torque
Description
【発明の属する技術分野】
本発明は、4輪駆動車の前軸と後軸との間や、前輪及び後輪のデファレンシャル装置等に配設して、一方の回転軸と他方の回転軸との差動制限制御を実行する車両の差動制限制御装置に関する。
【0002】
【従来の技術】
従来より、一方の回転軸と他方の回転軸の間、特に4輪駆動車の前後軸間における差動制限制御としては、回転軸間の実際の差動回転数を検出し、この実際の差動回転数をPID制御等によりフィードバックして目標とする差動回転数に収束させる技術が知られている。
【0003】
しかし、車両の様々な運動状態の基では、単純なPID制御では応答性、ハンチング等の問題が発生する可能性があり、PID制御における、それぞれのゲインを他パラメータ(横加速度、加速度、ヨーレート等)と連動させて対応することが行われている。例えば、特開平6−211063号公報では、左右輪或いは前後輪の駆動力配分によりヨーイング運動量をPD制御或いはPID制御によりフィードバック制御する技術において、比例項のゲイン、微分項のゲイン、積分項のゲインを、一方の回転軸と他方の回転軸との間の回転速度差に応じて可変設定する技術が開示されている。
【0004】
【特許文献1】
特開平6−211063号公報
【0005】
【発明が解決しようとする課題】
しかしながら、上述のゲインを他のパラメータと連動させ設定する技術では、走行中に時々刻々変化する各パラメータに対応するため、高精度のセンサと高速の演算処理機能が必要で、高精度でレスポンスの良いトラクション性能を実現しようとすると、システム全体のコストアップやシステムの複雑化を招いてしまうという問題があった。
【0006】
本発明は上記事情に鑑みてなされたもので、システム全体のコストアップやシステムの複雑化を生じることなく、高精度でレスポンスの良いトラクション性能を実現することが可能な車両の差動制限制御装置を提供することを目的としている。
【0007】
【課題を解決するための手段】
上記目的を達成するため請求項1記載の本発明による車両の差動制限制御装置は、一方の回転軸と他方の回転軸との間に介装し、上記一方の回転軸と上記他方の回転軸との間の駆動力の伝達を可変自在なクラッチ手段を備えた車両の差動制限制御装置において、上記一方の回転軸と上記他方の回転軸との間の目標とする差動回転数を設定する目標差動回転数設定手段と、上記一方の回転軸と上記他方の回転軸との間の実際の差動回転数を検出する実差動回転数検出手段と、上記目標とする差動回転数と上記実際の差動回転数との偏差を求め、少なくとも該偏差の積分項に関する極性を用いて切り替え関数を構成し、スライディングモード制御を適応して上記クラッチ手段の締結力を演算するクラッチトルク演算手段とを備え、上記クラッチトルク演算手段における上記切り替え関数は、上記極性の値に所定のゲインを乗算した値に、上記目標とする差動回転数と上記実際の差動回転数との偏差の微分項に所定のゲインを乗算した値を加算したものであることを特徴としている。
【0009】
また、請求項2記載の本発明による車両の差動制限制御装置は、請求項1記載の車両の差動制限制御装置において、上記クラッチトルク演算手段は、上記スライディングモード制御により演算した上記クラッチ手段の締結力に、上記目標とする差動回転数と上記実際の差動回転数との偏差の比例項に所定のゲインを乗算した値を加算して、最終的な上記クラッチ手段の締結力を演算することを特徴としている。
【0010】
また、請求項3記載の本発明による車両の差動制限制御装置は、一方の回転軸と他方の回転軸との間に介装し、上記一方の回転軸と上記他方の回転軸との間の駆動力の伝達を可変自在なクラッチ手段を備えた車両の差動制限制御装置において、上記一方の回転軸と上記他方の回転軸との間の目標とする差動回転数を設定する目標差動回転数設定手段と、上記一方の回転軸と上記他方の回転軸との間の実際の差動回転数を検出する実差動回転数検出手段と、少なくとも上記目標とする差動回転数と上記実際の差動回転数との偏差に基づいた積分項を用いて算出した極性の値に所定のゲインを乗算した項を有する切り替え関数を構成し、該切り替え関数が正の値の時に上記切り替え関数の値を制御値とするスライディングモード制御を用いて上記クラッチ手段の締結力を演算するクラッチトルク演算手段とを備えたことを特徴としている。
【0011】
更に、請求項4記載の本発明による車両の差動制限制御装置は、請求項3記載の車両の差動制限制御装置において、上記クラッチトルク演算手段における上記切り替え関数は、上記極性の値に所定のゲインを乗算した項に、上記目標とする差動回転数と上記実際の差動回転数とに基づいた微分項に所定のゲインを乗算した項を加算したものであることを特徴としている。
【0012】
また、請求項5記載の本発明による車両の差動制限制御装置は、請求項3又は請求項4記載の車両の差動制限制御装置において、上記クラッチトルク演算手段は、上記スライディングモード制御により演算した上記クラッチ手段の締結力に、上記目標とする差動回転数と上記実際の差動回転数とに基づいた比例制御により算出した上記クラッチ手段の締結力を加算して、最終的な上記クラッチ手段の締結力を演算することを特徴としている。
【0014】
また、請求項6記載の本発明による車両の差動制限制御装置は、請求項1、3、4の何れか一つに記載の車両の差動制限制御装置において、上記クラッチ手段は、左右輪間に介装するデファレンシャル装置の差動を制限するクラッチ手段であって、上記目標差動回転数設定手段は、上記左右輪間の目標とする差動回転数を設定し、上記実差動回転数検出手段は、上記左右輪間の実際の差動回転数を検出し、上記クラッチトルク演算手段は、上記目標差動回転数設定手段で設定した目標とする差動回転数と、上記実差動回転数検出手段で検出した実際の差動回転数との偏差を用いて上記クラッチ手段の締結力を演算することを特徴としている。
【0016】
また、請求項7記載の本発明による車両の差動制限制御装置は、請求項1、3、4の何れか一つに記載の車両の差動制限制御装置において、上記目標差動回転数設定手段は、予め車速と横加速度と上記クラッチ手段への入力トルクの少なくとも一つに応じて上記実際の差動回転数の下限値を設定し、この下限値を基に上記目標とする差動回転数を設定することを特徴としている。
【0017】
更に、請求項8記載の本発明による車両の差動制限制御装置は、請求項1、3、4の何れか一つに記載の車両の差動制限制御装置において、上記目標差動回転数設定手段は、設定する上記目標とする差動回転数が選択的に可変自在であることを特徴としている。
【0018】
また、請求項9記載の本発明による車両の差動制限制御装置は、請求項1、3、4の何れか一つに記載の車両の差動制限制御装置において、上記クラッチトルク演算手段は、ブレーキ作動時とアンチロックブレーキ作動時の少なくともどちらかの場合は、上記クラッチ手段の締結力を予め設定しておいた値とすることを特徴としている。
【0019】
すなわち、請求項1記載の車両の差動制限制御装置は、目標差動回転数設定手段で一方の回転軸と他方の回転軸との間の目標とする差動回転数を設定し、実差動回転数検出手段で一方の回転軸と他方の回転軸との間の実際の差動回転数を検出する。そして、クラッチトルク演算手段は、目標とする差動回転数と実際の差動回転数との偏差を求め、少なくとも該偏差の積分項に関する極性を用いて切り替え関数を構成し、スライディングモード制御を適応してクラッチ手段の締結力を演算し、この演算した締結力でクラッチ手段を制御する。このように、スライディングモード制御を利用してクラッチ手段の締結力を演算するようにすることで、わずかな目標差動回転数とのずれに対しても高応答に対応できるので、高精度センサを用いたシステム全体のコストアップやシステムの複雑化を生じることなく、高精度でレスポンスの良いトラクション性能を実現することが可能となる。
【0020】
この際、クラッチトルク演算手段における切り替え関数は、極性の値に所定のゲインを乗算した値に、目標とする差動回転数と実際の差動回転数との偏差の微分項に所定のゲインを乗算した値を加算したものとする。
【0021】
また、クラッチトルク演算手段は、請求項2記載のように、スライディングモード制御により演算したクラッチ手段の締結力に、目標とする差動回転数と実際の差動回転数との偏差の比例項に所定のゲインを乗算した値を加算して、最終的なクラッチ手段の締結力を演算する。
【0022】
更に、請求項3記載の車両の差動制限制御装置は、目標差動回転数設定手段で一方の回転軸と他方の回転軸との間の目標とする差動回転数を設定し、実差動回転数検出手段で一方の回転軸と他方の回転軸との間の実際の差動回転数を検出する。そして、クラッチトルク演算手段は、少なくとも目標とする差動回転数と実際の差動回転数との偏差に基づいた積分項を用いて算出した極性の値に所定のゲインを乗算した項を有する切り替え関数を構成し、該切り替え関数が正の値の時に切り替え関数の値を制御値とするスライディングモード制御を用いてクラッチ手段の締結力を演算し、この演算した締結力でクラッチ手段を制御する。すなわち、従来のPID制御でクラッチトルクを算出するものでは、積分項が制御偏差の過去の履歴を持つために、クラッチトルクを適切な値に収束させるのに時間がかかり、制御の応答性が悪化することがあった。本請求項4記載の車両の差動制限制御装置では、積分項の極性をもちいて、ON−OFF的にゲインだけ変化させ、実際値を目標値に近づけるスライディングモード制御を用いてクラッチトルクを算出しているので、従来の積分項のような過去の履歴を反映するものがなく、制御の応答性を格段に向上させることができると共に、安価なシステムで達成できる。また、積分項の極性であるため、チャタリング自体も防止することができる。従って、高精度センサを用いたシステム全体のコストアップやシステムの複雑化を生じることなく、高精度でレスポンスの良いトラクション性能を実現することが可能となる。
【0023】
この請求項3に対し、請求項4記載の構成を加えることにより、上述の請求項3の作用効果に加え、以下の作用効果を得ることが可能となる。すなわち、請求項3記載のように、スライディングモード制御の演算式が、積分項の極性にゲインを乗算した項だけであると、0を超えたら常にON−OFF的に制御が働いてしまう。しかし、本請求項4記載の車両の差動制限制御装置では、切り替え関数は、極性の値に所定のゲインを乗算した項に、微分項に所定のゲインを乗算した項を加算するようにしているので、この項が不感帯の役目を成し、すなわち、極性に所定のゲインを乗算した値が微分項に所定のゲインを乗算した値よりも大きくならないと制御が働かないのでチャタリングを効果的に防止することができる。
【0024】
また、請求項3又は請求項4に対し、請求項5記載の構成を加えることにより、上述の請求項3又は請求項4の作用効果に加え、以下の作用効果を得ることが可能となる。すなわち、比例制御だけでは、目標差回転と実差回転の偏差が小さい緩やかな制御に対して追従性は悪くないが、タイヤスリップ等で許容できる範囲以外の偏差に対しては追従できない。従って、本請求項5では、比例制御にスライディングモード制御を加えたことにより大幅な変化に対しても追従性を向上することができる。
【0026】
更に、クラッチ手段は、具体的には請求項6記載のように、左右輪間に介装するデファレンシャル装置の差動を制限するクラッチ手段であって、目標差動回転数設定手段は、左右輪間の目標とする差動回転数を設定し、実差動回転数検出手段は、上記左右輪間の実際の差動回転数を検出し、クラッチトルク演算手段は、目標差動回転数設定手段で設定した目標とする差動回転数と、実差動回転数検出手段で検出した実際の差動回転数との偏差を用いてクラッチ手段の締結力を演算する。
【0028】
また、目標差動回転数設定手段が、請求項7記載のように、予め車速と横加速度とクラッチ手段への入力トルクの少なくとも一つに応じて実際の差動回転数の下限値を設定し、この下限値を基に目標とする差動回転数を設定するようにすれば、車両の運動状態を正確に反映した目標とする差動回転数を得ることが可能になり、精度の良い制御が行える。
【0029】
更に、請求項8記載のように、目標差動回転数設定手段が、目標とする差動回転数が選択的に可変自在であれば、ドライバの好みに応じた自然な制御特性を得ることが可能となる。
【0030】
また、請求項9記載のように、クラッチトルク演算手段は、ブレーキ作動時とアンチロックブレーキ作動時の少なくともどちらかの場合は、クラッチ手段の締結力を予め設定しておいた値とすることで、ブレーキ作動時とアンチロックブレーキ作動時における制御の無用な干渉を防止することができる。
【0031】
【発明の実施の形態】
以下、図面に基づいて本発明の実施の形態を説明する。
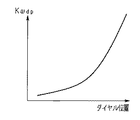
図1〜図7は本発明の実施の一形態を示し、図1は車両の駆動系とセンタデファレンシャル差動制限制御部の概略説明図、図2はセンタデファレンシャル差動制限制御部の機能ブロック図、図3はエンジン出力特性のマップの一例を示す説明図、図4は車速と前後軸間制御開始差動回転数の基本値マップの一例を示す説明図、図5は横加速度に基づく前後軸間制御開始差動回転数の補正係数マップの一例を示す説明図、図6はセンタデフ入力トルクに基づく前後軸間制御開始差動回転数の補正係数マップの一例を示す説明図、図7はダイヤル位置に基づく前後軸間制御開始差動回転数の補正係数マップの一例を示す説明図である。
【0032】
図1において、符号1は車両前部に配置されたエンジンを示し、このエンジン1による駆動力は、エンジン1後方の自動変速装置(トルクコンバータ等も含んで図示)2からトランスミッション出力軸2aを経てセンタデファレンシャル装置3に伝達される。そして、センタデファレンシャル装置3から後輪側には、リヤドライブ軸4、プロペラシャフト5、ドライブピニオン6を介して後輪終減速装置7に入力される一方、前輪側には、トランスファドライブギヤ8、トランスファドリブンギヤ9、ドライブピニオン軸部となっているフロントドライブ軸10を介して前輪終減速装置11に入力される。ここで、自動変速装置2、センタデファレンシャル装置3および前輪終減速装置11等は、一体にケース12内に設けられている。
【0033】
後輪終減速装置7に入力された駆動力は、後輪左ドライブ軸13RLを経て左後輪14RLに伝達される一方、後輪右ドライブ軸13RRを経て右後輪14RRに伝達される。また、前輪終減速装置11に入力された駆動力は、前輪左ドライブ軸13FLを経て左前輪14FLに伝達される一方、前輪右ドライブ軸13FRを経て右前輪14FRに伝達される。
【0034】
センタデファレンシャル装置3は、入力側のトランスミッション出力軸2aに大径の第1のサンギヤ15が形成されており、この第1のサンギヤ15が小径の第1のピニオン16と噛合して第1の歯車列が構成されている。
【0035】
また、後輪への出力を行うリヤドライブ軸4には、小径の第2のサンギヤ17が形成されており、この第2のサンギヤ17が大径の第2のピニオン18と噛合して第2の歯車列が構成されている。
【0036】
第1のピニオン16と第2のピニオン18は、ピニオン部材19に一体に形成されており、複数(例えば3個)のピニオン部材19が、キャリア20に設けた固定軸に回転自在に軸支されている。そして、このキャリア20の前端には、トランスファドライブギヤ8が連結され、前輪への出力が行われる。
【0037】
また、キャリア20には、前方からトランスミッション出力軸2aが回転自在に挿入される一方、後方からはリヤドライブ軸4が回転自在に挿入されて、空間中央に第1のサンギヤ15と第2のサンギヤ17を格納している。そして、複数のピニオン部材19の各第1のピニオン16が第1のサンギヤ15に、各第2のピニオン18が第2のサンギヤ17に、共に噛合されている。
【0038】
こうして、入力側の第1のサンギヤ15に対し、第1,第2のピニオン16,18、及び、第2のサンギヤ17を介して一方の出力側とし、第1,第2のピニオン16,18のキャリア20を介して他方の出力側として噛み合い構成され、リングギヤの無い複合プラネタリギヤを成している。
【0039】
そしてかかる複合プラネタリギヤ式センタデファレンシャル装置3は、第1,第2のサンギヤ15,17、および、これらサンギヤ15,17の周囲に複数個配置される第1,第2のピニオン16,18の歯数を適切に設定することで差動機能を有する。
【0040】
また、第1,第2のピニオン16,18と第1,第2のサンギヤ15,17との噛み合いピッチ半径を適切に設定することで、基準トルク配分を所望の配分(例えば、後輪偏重にした不等トルク配分)にする。
【0041】
センタデファレンシャル装置3は、第1,第2のサンギヤ15,17と第1,第2のピニオン16,18とを例えばはすば歯車にし、第1の歯車列と第2の歯車列のねじれ角を異にしてスラスト荷重を相殺させることなくスラスト荷重を残留させる。更に、ピニオン部材19の両端で発生する摩擦トルクを、第1,第2のピニオン16,18とキャリア20に設けた固定軸の表面に噛み合いによる分離、接線荷重の合成力が作用し摩擦トルクが生じるように設定する。こうして、入力トルクに比例した差動制限トルクを得られるようにすることで、このセンタデファレンシャル装置3自体によっても差動制限機能が得られるようになっている。
【0042】
また、センタデファレンシャル装置3の2つの出力部材、すなわちキャリヤ20とリヤドライブ軸4との間には、前後輪間の駆動力配分を可変する、クラッチ手段としての油圧式多板クラッチを採用したセンタデフクラッチ(トランスファクラッチ)21が設けられている。そして、このトランスファクラッチ21の締結力を制御することで、前後輪のトルク配分が、前後50:50の直結による4WDから、センタデファレンシャル装置3によるトルク配分比(例えば前後35:65)の範囲で可変制御することが可能となっている。
【0043】
トランスファクラッチ21は、複数のソレノイドバルブを擁した油圧回路で構成するセンタデフクラッチ駆動部51と接続されており、このセンタデフクラッチ駆動部51で発生される油圧で解放、連結が行われる。そして、センタデフクラッチ駆動部51を駆動させる制御信号(各ソレノイドバルブに対する出力信号)は、後述のセンタデファレンシャル差動制限制御部50から出力される。
【0044】
一方、後輪終減速装置7は、ベベルギヤ式の差動機構部22と、この左右輪間の差動制限を行う、油圧式多板クラッチを採用したリヤデフクラッチ23を備えて構成されており、リヤデフクラッチ23は、ドライブピニオン6が噛合されるリングギヤ24が固定されたデフケース25と後輪右ドライブ軸13RRとの間に設けられている。
【0045】
また、前輪終減速装置11も、後輪終減速装置7と略同様に構成され、ベベルギヤ式の差動機構部26と、この左右輪間の差動制限を行う、油圧式多板クラッチを採用したフロントデフクラッチ27を備えて構成されている。そして、フロントデフクラッチ27は、フロントドライブ軸10のドライブピニオンが噛合されるリングギヤ28が固定されたデフケース29と前輪右ドライブ軸13FRとの間に設けられている。
【0046】
上述のセンタデファレンシャル差動制限制御部50には、制御に必要な信号が後述の如く各センサ類から入力される。
すなわち、各車輪14FL,14FR,14RL,14RRの車輪速度が車輪速度センサ31FL,31FR,31RL,31RRにより検出されて、センタデファレンシャル差動制限制御部50に入力される。また、センタデファレンシャル差動制限制御部50には、車両に生じている横加速度Gyが横加速度センサ32から、エンジン1のスロットル弁の開度θthがスロットル開度センサ33から、エンジン回転数Neがエンジン回転数センサ(或いはエンジン1に関する種々の制御を行うエンジン制御装置)34から、自動変速装置2におけるギヤ比Grが自動変速装置2に関する変速制御等を実行するトランスミッション制御装置35から、それぞれ入力される。更に、車両には、図示しないブレーキペダルの踏み込み時にONするブレーキスイッチ36が設けられており、このブレーキスイッチ36からのON−OFF信号も、センタデファレンシャル差動制限制御部50に入力される。また、車両には、制動時における車輪のロックを防止する公知のアンチロックブレーキシステム(ABS)が搭載されており、このABS制御装置37からのABSの作動状態を示す信号(ABS作動時にONとなる信号)も、センタデファレンシャル差動制限制御部50に入力される。また、ドライバの操作可能な位置には、センタデファレンシャル差動制限制御の特性を可変することでトラクション性能をドライバの好みに合わせて、回頭性を重視する特性か、或いは、安定性を重視する特性かに調整自在な可変ダイヤル38が設けられている。
【0047】
センタデファレンシャル差動制限制御部50は、マイクロコンピュータとその周辺回路とで構成され、図2に示すように、車速演算部50a、センタデフ入力トルク推定部50b、ブレーキスイッチディレイ処理部50c、前後軸実差動回転数演算部50d、前輪側左右実差動回転数演算部50e、後輪側左右実差動回転数演算部50f、制御開始差動回転数演算部50g、目標差動回転数設定部50h、スライディングモード制御クラッチトルク演算部50i、偏差比例制御クラッチトルク演算部50j、クラッチトルク演算出力部50kから主要に構成されている。
【0048】
車速演算部50aは、4輪の車輪速センサ、すなわち各車輪速度センサ31FL,31FR,31RL,31RRから各車輪14FL,14FR,14RL,14RRの車輪速度ωfl,ωfr,ωrl,ωrrが入力され、例えばこれらの平均を演算することにより車速V(=(ωfl,ωfr,ωrl,ωrr)/4)を演算し、制御開始差動回転数設定部50gに出力する。
【0049】
センタデフ入力トルク推定部50bは、スロットル開度センサ33、エンジン回転数センサ(或いはエンジン制御装置)34、トランスミッション制御装置35から、それぞれスロットル開度θth、エンジン回転数Ne、ギヤ比Grが入力される。そして、例えば、スロットル開度θthとエンジン回転数Neとから予め記憶しておいたエンジン出力特性のマップ(図3にその一例を示す)を参照し、エンジン出力トルクTcd'を求め、このエンジン出力トルクTcd'にギヤ比Grを乗算してセンタデファレンシャル装置3への入力トルクTcdを推定する。すなわち、Tcd=Tcd'・Gr。こうして推定されたセンタデフ入力トルクTcdは、制御開始差動回転数演算部50gに出力される。
【0050】
ブレーキスイッチディレイ処理部50cは、ブレーキスイッチ36からのON−OFF信号が入力され、ハンチング防止のためブレーキスイッチ36がON状態からOFF状態に切り替わるときに所定の短いディレイ時間が設定され、ブレーキスイッチ36がON状態からOFF状態に切り替わるときにこのディレイ時間が経過して初めてブレーキスイッチ36がOFF状態とされる(尚、OFF状態からON状態に切り替わるときにはディレイ処理は行われない)。このブレーキスイッチディレイ処理部50cでディレイ処理されたブレーキスイッチ信号は、スライディングモード制御クラッチトルク演算部50i、偏差比例制御クラッチトルク演算部50j、クラッチトルク演算出力部50kに出力される。
【0051】
前後軸実差動回転数演算部50dは、各車輪速度センサ31FL,31FR,31RL,31RRから各車輪14FL,14FR,14RL,14RRの車輪速度ωfl,ωfr,ωrl,ωrrが入力される。そして、これら車輪速度から、2種類の前後軸間の実差動回転数Δωctrf、Δωctrrを以下の(1)、(2)式により演算する。
Δωctrf=((ωfl+ωfr)−(ωrl+ωrr))/2 …(1)
Δωctrr=((ωrl+ωrr)−(ωfl+ωfr))/2 …(2)
この際、前軸の回転数が後軸の回転数より早い場合には、Δωctrfは正の値、Δωctrrは負の値となり、前軸の回転数が後軸の回転数より遅い場合には、逆に、Δωctrfは負の値、Δωctrrは正の値となる。こうして演算された前後軸間の実差動回転数Δωctrf、Δωctrrは、スライディングモード制御クラッチトルク演算部50i、偏差比例制御クラッチトルク演算部50jに出力される。尚、このように2種類の前後軸間の実差動回転数Δωctrf、Δωctrrを演算するのは、後述のクラッチトルクの演算において、前後軸間の実差動回転数Δωctrf、Δωctrrの正負により、早い回転数の回転軸から遅い回転数の軸にトルクを伝達するようにクラッチトルクの設定を変えられるようにするためである。こうして、前後軸実差動回転数演算部50dで演算された前後軸間の実差動回転数Δωctrf、Δωctrrは、スライディングモード制御クラッチトルク演算部50i、及び、偏差比例制御クラッチトルク演算部50jに出力される。
【0052】
前輪側左右実差動回転数演算部50eは、前輪側左右輪の車輪速度センサ31FL,31FRから左右前輪14FL,14FRの車輪速度ωfl,ωfrが入力され、横加速度センサ32から横加速度Gyが入力されて、車両の旋回状態(直進状態も含む)に応じて以下の(3)、(4)、(5)式の何れかにより、左前輪14FLと右前輪14FRとの間の実際の差動回転数ΔωFtを演算する。この際、車両の旋回状態は、横加速度Gyにより判定し、横加速度の絶対値|Gy|が予め設定しておいた所定値Ays以下の場合は車両は略直進状態と判定し、横加速度GyがAysより大きい場合は車両は左旋回状態、横加速度Gyが−Aysより小さい場合は車両は右旋回状態と判定する。尚、車両の旋回状態は、その他、ヨーレートや舵角等によっても判定可能であり、これらから判定するようにしても良い。
右旋回時…ΔωFt=ωfr−ωfl …(3)
左旋回時…ΔωFt=ωfl−ωfr …(4)
略直進時…ΔωFt=|ωfr−ωfl| …(5)
尚、左右両方の車輪がスリップしていない状態においては、旋回外輪の方が車輪速度が速くなるため(3)、(4)式で得られる実際の差動回転数ΔωFtは負の値となる。こうして、演算された左前輪14FLと右前輪14FRとの間の実際の差動回転数ΔωFtは、スライディングモード制御クラッチトルク演算部50i、及び、偏差比例制御クラッチトルク演算部50jに出力される。
【0053】
後輪側左右実差動回転数演算部50fは、後輪側左右輪の車輪速度センサ31RL,31RRから左右後輪14RL,14RRの車輪速度ωrl,ωrrが入力され、横加速度センサ32から横加速度Gyが入力されて、車両の旋回状態(直進状態も含む)に応じて以下の(6)、(7)、(8)式の何れかにより、左後輪14RLと右後輪14RRとの間の実際の差動回転数ΔωRrを演算する。この際、車両の旋回状態は、上述の前輪側左右実差動回転数演算部50eと同様、横加速度Gyにより判定し、横加速度の絶対値|Gy|が予め設定しておいた所定値Ays以下の場合は車両は略直進状態と判定し、横加速度GyがAysより大きい場合は車両は左旋回状態、横加速度Gyが−Aysより小さい場合は車両は右旋回状態と判定する。尚、車両の旋回状態は、その他、ヨーレートや舵角等によっても判定可能であり、これらから判定するようにしても良い。
右旋回時…ΔωRr=ωrr−ωrl …(6)
左旋回時…ΔωRr=ωrl−ωrr …(7)
略直進時…ΔωRr=|ωrr−ωrl| …(8)
尚、左右両方の車輪がスリップしていない状態においては、旋回外輪の方が車輪速度が速くなるため(6)、(7)式で得られる実際の差動回転数ΔωRrは負の値となる。こうして、演算された左後輪14RLと右後輪14RRとの間の実際の差動回転数ΔωRrは、スライディングモード制御クラッチトルク演算部50i、及び、偏差比例制御クラッチトルク演算部50jに出力される。
【0054】
以上の前後軸実差動回転数演算部50d、前輪側左右実差動回転数演算部50e、及び、後輪側左右実差動回転数演算部50fは、実差動回転数検出手段として設けられている。
【0055】
制御開始差動回転数演算部50gは、横加速度センサ32から横加速度Gyが、可変ダイヤル38からドライバにより選択されたダイヤル位置が、車速演算部50aから車速Vが、センタデフ入力トルク推定部50bから推定されたセンタデフ入力トルクTcdが、それぞれ入力される。
【0056】
そして、これら車速V、横加速度Gy、センタデフ入力トルクTcd、及び、ダイヤル位置に応じ、予め設定しておいたマップを参照し、前後軸間の実差動回転数Δωctrf、Δωctrr、左前輪14FLと右後輪14FRとの間の実際の差動回転数ΔωFt、左後輪14RLと右前輪14RRとの間の実際の差動回転数ΔωRrのそれぞれの実際の差動回転数の下限値となる制御開始差動回転数(前後軸間制御開始差動回転数Δωctrfs、Δωctrrs、前輪側制御開始差動回転数ΔωFts、後輪側制御開始差動回転数ΔωRrs)を演算する。
【0057】
この制御開始差動回転数の設定を、前後軸間制御開始差動回転数Δωctrfsを例に具体的に説明する。まず、図4に示すような、車速Vと前後軸間制御開始差動回転数Δωctrfsの基本値マップから、現在の車速Vを基に前後軸間制御開始差動回転数Δωctrfsの基本値Δωctrfsbを設定する。また、図5に示すような、横加速度Gyに基づく前後軸間制御開始差動回転数Δωctrfsの補正係数マップから、現在の横加速度Gyを基に前後軸間制御開始差動回転数Δωctrfsの補正係数kωgyを求める。更に、図6に示すような、センタデフ入力トルクTcdに基づく前後軸間制御開始差動回転数Δωctrfsの補正係数マップから、現在のセンタデフ入力トルクTcdを基に前後軸間制御開始差動回転数Δωctrfsの補正係数kωtを求める。そして更に、図7に示すような、ダイヤル位置に基づく前後軸間制御開始差動回転数Δωctrfsの補正係数マップから、現在のダイヤル位置を基に前後軸間制御開始差動回転数Δωctrfsの補正係数kωdpを求める。そして、これらを乗じて、最終的な前後軸間制御開始差動回転数Δωctrfs(=Δωctrfsb・kωgy・kωt・kωdp)を演算する。
【0058】
ここで、それぞれの制御開始差動回転数Δωctrfs、Δωctrrs、ΔωFts、ΔωRrsは、後述の如く、前後軸間、前輪左右輪間、後輪左右輪間の差動制限制御を実行するまでどの程度許容するかを定める閾値であり、実差動回転数Δωctrf、Δωctrr、ΔωFt、ΔωRrが制御開始差動回転数Δωctrfs、Δωctrrs、ΔωFts、ΔωRrsよりも小さい場合は、トランスファクラッチ21に対する締結トルクを0とする。特に前後軸間においては、実際に制御する差動回転数が小さくなり過ぎて、トランスファクラッチ21が静止摩擦状態で連結し、トランスファクラッチ21の制御がスリップ−ロック状態となり制御の収束が遅くなり、また、制御安定性が悪化することを防止するために設定される。また、前輪左右輪間や後輪左右輪間においては、制御開始差動回転数ΔωFts、ΔωRrsが、例えば0に設定されている場合は、旋回内輪の車輪速度が旋回外輪の車輪速度より大きくなった場合、直ぐにセンタデファレンシャルの差動制限制御が実行されることとなり、それ以外の場合では、フロントデフクラッチ27やリヤデフクラッチ23が通常に作動しているとし、センタデファレンシャルの差動制限制御が、このデファレンシャル制御と干渉しないような制御設定となる。
【0059】
そして、具体的には図4に示すように、車速Vが高速になるほど前後軸間制御開始差動回転数Δωctrfsが大きく設定されるようにして、高速ほど閾値を緩和し、高速ほど締結度合いを緩和して燃費の向上が図れるようになっている。
【0060】
また、具体的には図5に示すように、横加速度Gyが大きくなるほど前後軸間制御開始差動回転数Δωctrfsが大きく設定されるようにして、横加速度Gyが大きくなるほど閾値を緩和し、横加速度Gyが大きくなるほど締結度合いを緩和して車両の旋回性能が向上されるようになっている。
【0061】
更に、具体的には図6に示すように、センタデフ入力トルクTcdが大きくなるほど前後軸間制御開始差動回転数Δωctrfsが小さく設定されるようにして、センタデフ入力トルクTcdが大きくなるほど閾値を厳しくし、センタデフ入力トルクTcdが大きくなるほど強く締結されるようにして、安定したトラクション性能が得られるようになっている。
【0062】
また、具体的には図7に示すように、ダイヤル位置に応じて前後軸間制御開始差動回転数Δωctrfsを可変可能になっており、それぞれのドライバが自分の好みに合わせて運転し易いトラクション性能を選択できる。また、車両特性等が経時的に変化したり、或いは、車両間の特性に誤差が生じても、この可変ダイヤル38で適正な特性に設定可能となっている。
【0063】
尚、上述の前後軸間制御開始差動回転数Δωctrfsでは、車速V、横加速度Gy、センタデフ入力トルクTcd、ダイヤル位置の全てのパラメータにより前後軸間制御開始差動回転数Δωctrfsが正確に可変設定できるようになっているが、少なくとも何れか一つ以上のパラメータに応じて前後軸間制御開始差動回転数Δωctrfsが設定されるものであっても良い。また、車両仕様によっては、これらパラメータの何れにも依存することなく一定値であっても良い。こうして、他の制御開始差動回転数Δωctrrs、ΔωFts、ΔωRrsも同様にして演算設定され、各制御開始差動回転数Δωctrfs、Δωctrrs、ΔωFts、ΔωRrsは、目標差動回転数設定部50h、スライディングモード制御クラッチトルク演算部50i、及び、偏差比例制御クラッチトルク演算部50jに出力される。
【0064】
目標差動回転数設定部50hは、制御開始差動回転数演算部50gから各制御開始差動回転数Δωctrfs、Δωctrrs、ΔωFts、ΔωRrsが入力され、それぞれの制御開始差動回転数Δωctrfs、Δωctrrs、ΔωFts、ΔωRrsを基に以下の(9)、(10)、(11)、(12)式により、前後軸間目標差動回転数Δωctrft、Δωctrrt、前輪側目標差動回転数ΔωFtt、後輪側目標差動回転数ΔωRrtを演算する。
Δωctrft=Δωctrfs+Cctrft …(9)
Δωctrrt=Δωctrrs+Cctrrt …(10)
ΔωFtt=ΔωFts+CFtt …(11)
ΔωRrt=ΔωRrs+CRrt …(12)
ここで、Cctrft、Cctrrt、CFtt、CRrは、予め演算や実験等を基に設定しておいた定数である。こうして、設定された各目標差動回転数Δωctrft、Δωctrrt、ΔωFtt、ΔωRrtは、スライディングモード制御クラッチトルク演算部50i、及び、偏差比例制御クラッチトルク演算部50jに出力される。このように、制御開始差動回転数演算部50gと、目標差動回転数設定部50hは、目標差動回転数設定手段として設けられている。
【0065】
スライディングモード制御クラッチトルク演算部50iは、ブレーキスイッチディレイ処理部50cからディレイ処理されたブレーキスイッチ信号、前後軸実差動回転数演算部50dから前後軸間の実差動回転数Δωctrf、Δωctrr、前輪側左右実差動回転数演算部50eから左前輪14FLと右前輪14FRとの間の実際の差動回転数ΔωFt、後輪側左右実差動回転数演算部50fから左後輪14RLと右前輪14RRとの間の実際の差動回転数ΔωRr、制御開始差動回転数演算部50gから各制御開始差動回転数Δωctrfs、Δωctrrs、ΔωFts、ΔωRrs、目標差動回転数設定部50hから各目標差動回転数Δωctrft、Δωctrrt、ΔωFtt、ΔωRrtが入力される。そして、このスライディングモード制御クラッチトルク演算部50iは、それぞれの回転数毎に目標差動回転数と実差動回転数との偏差を求め、少なくともこの偏差の積分項に関する極性を用いて切り替え関数を構成し、スライディングモード制御を適応して、トランスファクラッチ21のクラッチトルクを演算する。
【0066】
すなわち、各回転数毎の目標差動回転数と実差動回転数との偏差は、以下のようにして演算できる。
前後軸間の差動回転数偏差εctrf=Δωctrf−Δωctrft …(13)
前後軸間の差動回転数偏差εctrr=Δωctrr−Δωctrrt …(14)
前輪左右輪間の差動回転数偏差εFt=ΔωFt−ΔωFtt …(15)
後輪左右輪間の差動回転数偏差εRr=ΔωRr−ΔωRrt …(16)
【0067】
そして、各回転数毎のスライディングモード制御によるトランスファクラッチ21に対するクラッチトルクTSMCctrf、TSMCctrr、TSMCFt、TSMCRrは、それぞれ、以下のような切り替え関数(17)式、(20)式、(23)式、(26)式を用いて演算される。
【0068】
まず、前後軸間の差動回転数偏差εctrfを用いるスライディングモード制御によるクラッチトルクTSMCctrfの設定について説明する。
TSMCctrf=sat(xctrf) …(17)
但し、xctrf>0のとき、TSMCctrf=sat(xctrf)=xctrf
xctrf≦0のとき、TSMCctrf=sat(xctrf)=0
xctrf=kwctrf・Jw・(dεctrf/dt)
+Tsg・(sctrf/(|sctrf|+δ)) …(18)
ここで、
sctrf=εctrf+ki・∫(εctrf)dt …(19)
(但し、積分範囲は0からtまで)
また、kwctrfは微分項ゲインであり、(dεctrf/dt)>0の場合はkwu、(dεctrf/dt)≦0の場合はkwdとする。更に、Jwは慣性項、Tsgは切替ゲイン、δはチャタリング防止用定数、kiは積分項ゲインである。
【0069】
そして、実差動回転数Δωctrfが制御開始差動回転数Δωctrfsを下回った場合には、実際に制御する差動回転数が小さくなり過ぎて、トランスファクラッチ21が静止摩擦状態で連結し、トランスファクラッチ21の制御がスリップ−ロック状態となり制御の収束が遅くなり、また、制御安定性が悪化することを防止するため、クラッチトルクTSMCctrfは0とし、更に、積分値もリセット(∫(εctrf)dt=0:但し、積分範囲は0からtまで)する。また、ブレーキスイッチのON信号が入力された場合も、このブレーキ状態との干渉を避けるため、同様に、クラッチトルクTSMCctrfは0とし、積分値もリセットする。
【0070】
次に、前後軸間の差動回転数偏差εctrrを用いるスライディングモード制御によるクラッチトルクTSMCctrrの設定について説明する。
TSMCctrr=sat(xctrr) …(20)
但し、xctrr>0のとき、TSMCctrr=sat(xctrr)=xctrr
xctrr≦0のとき、TSMCctrr=sat(xctrr)=0
xctrr=kwctrr・Jw・(dεctrr/dt)
+Tsg・(sctrr/(|sctrr|+δ)) …(21)
ここで、
sctrr=εctrr+ki・∫(εctrr)dt …(22)
(但し、積分範囲は0からtまで)
また、kwctrrは微分項ゲインであり、(dεctrr/dt)>0の場合はkwu、(dεctrr/dt)≦0の場合はkwdとする。更に、Jwは慣性項、Tsgは切替ゲイン、δはチャタリング防止用定数、kiは積分項ゲインである。
【0071】
そして、実差動回転数Δωctrrが制御開始差動回転数Δωctrrsを下回った場合には、実際に制御する差動回転数が小さくなり過ぎて、トランスファクラッチ21が静止摩擦状態で連結し、トランスファクラッチ21の制御がスリップ−ロック状態となり制御の収束が遅くなり、また、制御安定性が悪化することを防止するため、クラッチトルクTSMCctrrは0とし、更に、積分値もリセット(∫(εctrr)dt=0:但し、積分範囲は0からtまで)する。また、ブレーキスイッチのON信号が入力された場合も、このブレーキ状態との干渉を避けるため、同様に、クラッチトルクTSMCctrrは0とし、積分値もリセットする。
【0072】
次に、前輪左右輪間の差動回転数偏差εFtを用いるスライディングモード制御によるクラッチトルクTSMCFtの設定について説明する。
TSMCFt=sat(xFt) …(23)
但し、xFt>0のとき、TSMCFt=sat(xFt)=xFt
xFt≦0のとき、TSMCFt=sat(xFt)=0
xFt=kwFt・Jw・(dεFt/dt)
+Tsg・(sFt/(|sFt|+δ)) …(24)
ここで、
sFt=εFt+ki・∫(εFt)dt …(25)
(但し、積分範囲は0からtまで)
また、kwFtは微分項ゲインであり、(dεFt/dt)>0の場合はkwu、(dεFt/dt)≦0の場合はkwdとする。更に、Jwは慣性項、Tsgは切替ゲイン、δはチャタリング防止用定数、kiは積分項ゲインである。
【0073】
そして、前輪側左右輪間の実差動回転数ΔωFtが制御開始差動回転数ΔωFtsを下回った場合には、フロントデフクラッチ27の制御で十分対応可能な状態と判断し、トランスファクラッチ21の制御が不必要に干渉しないように、クラッチトルクTSMCFtは0とし、更に、積分値もリセット(∫(εFt)dt=0:但し、積分範囲は0からtまで)する。また、ブレーキスイッチのON信号が入力された場合も、このブレーキ状態との干渉を避けるため、同様に、クラッチトルクTSMCFtは0とし、積分値もリセットする。
【0074】
次に、後輪左右輪間の差動回転数偏差εRrを用いるスライディングモード制御によるクラッチトルクTSMCRrの設定について説明する。
TSMCRr=sat(xRr) …(26)
但し、xRr>0のとき、TSMCRr=sat(xRr)=xRr
xRr≦0のとき、TSMCRr=sat(xRr)=0
xRr=kwRr・Jw・(dεRr/dt)
+Tsg・(sRr/(|sRr|+δ)) …(27)
ここで、
sRr=εRr+ki・∫(εRr)dt …(28)
(但し、積分範囲は0からtまで)
また、kwRrは微分項ゲインであり、(dεRr/dt)>0の場合はkwu、(dεRr/dt)≦0の場合はkwdとする。更に、Jwは慣性項、Tsgは切替ゲイン、δはチャタリング防止用定数、kiは積分項ゲインである。
【0075】
そして、後輪側左右輪間の実差動回転数ΔωRrが制御開始差動回転数ΔωRrsを下回った場合には、リヤデフクラッチ23の制御で十分対応可能な状態と判断し、トランスファクラッチ21の制御が不必要に干渉しないように、クラッチトルクTSMCRrは0とし、更に、積分値もリセット(∫(εRr)dt=0:但し、積分範囲は0からtまで)する。また、ブレーキスイッチのON信号が入力された場合も、このブレーキ状態との干渉を避けるため、同様に、クラッチトルクTSMCRrは0とし、積分値もリセットする。
【0076】
このように、本実施の形態のスライディングモード制御においては、偏差の積分項に関する極性を用いて切り替え関数を構成している。すなわち、切り替え関数(18)式においては、偏差の積分項sctrfを(|sctrf|+δ)で除して積分項に関する極性を求め、切り替え関数(21)式においては、偏差の積分項sctrrを(|sctrr|+δ)で除して積分項に関する極性を求め、切り替え関数(24)式においては、偏差の積分項sFtを(|sFt|+δ)で除して積分項に関する極性を求め、切り替え関数(27)式においては、偏差の積分項sRrを(|sRr|+δ)で除して積分項に関する極性を求めている。尚、δは、0で除することを防止する値ともなっている。このため、例え、それぞれの積分項の値が小さい場合であっても、この値の小ささに関係なく、その値をスライディングモード制御に利用してクラッチトルクを設定することにより、高応答に対応することが可能で、高精度でレスポンスの良いトラクション性能を実現することができるようになっている。
【0077】
また、本実施の形態のスライディングモード制御を上述の説明とは別に下記のようにも説明できる。前後軸間の差動回転数偏差εctrfを用いた場合について説明すると、偏差の積分項sctrfを用いて算出した極性の値sctrf/(|sctrf|+δ)に所定のゲインTsgを乗算した項を有する切り替え関数sat(xctrf)を構成して、この切り替え関数が正の値、すなわち、sat(xctrf)が0より大きい時、sat(xctrf)の値を制御値としてクラッチトルクを設定する。
【0078】
すなわち、従来のPID制御でクラッチトルクを算出するのでは、積分項が制御偏差の過去の履歴を持つために応答性が悪化するが、本発明においては、積分項の極性を用いてON−OFF的にゲインだけ変化させ、実際値を目標値に近づけるスライディングモード制御を用いてクラッチトルクを算出しているので、従来の積分制御のような過去の履歴を反映することがなく応答性を向上できると共に安価なシステムで達成できる。また、積分項の極性であるためチャタリング自体も防止することができる。
【0079】
こうして、スライディングモード制御クラッチトルク演算部50iで演算された各クラッチトルクTSMCctrf、TSMCctrr、TSMCFt、TSMCRrは、クラッチトルク演算部50kに出力される。
【0080】
偏差比例制御クラッチトルク演算部50jは、ブレーキスイッチディレイ処理部50cからディレイ処理されたブレーキスイッチ信号、前後軸実差動回転数演算部50dから前後軸間の実差動回転数Δωctrf、Δωctrr、前輪側左右実差動回転数演算部50eから左前輪14FLと右前輪14FRとの間の実際の差動回転数ΔωFt、後輪側左右実差動回転数演算部50fから左後輪14RLと右前輪14RRとの間の実際の差動回転数ΔωRr、制御開始差動回転数演算部50gから各制御開始差動回転数Δωctrfs、Δωctrrs、ΔωFts、ΔωRrs、目標差動回転数設定部50hから各目標差動回転数Δωctrft、Δωctrrt、ΔωFtt、ΔωRrtが入力される。そして、この偏差比例制御クラッチトルク演算部50jは、それぞれの回転数毎に目標差動回転数と実差動回転数との偏差を後述の如く求め、この偏差に応じて実差動回転数を目標差動回転数に収束させるクラッチトルクの比例成分(クラッチトルクTpcctrf、Tpcctrr、TpcFt、TpcRr)を演算する。
【0081】
すなわち、各回転数毎の目標差動回転数と実差動回転数との偏差は、以下のようにして演算できる。
前後軸間の差動回転数偏差εpctrf=Δωctrf−Δωctrft
−(Δωctrft−Δωctrfs) …(29)
前後軸間の差動回転数偏差εpctrr=Δωctrr−Δωctrrt
−(Δωctrrt−Δωctrrs) …(30)
前輪左右輪間の差動回転数偏差εpFt=ΔωFt−ΔωFtt
−(ΔωFtt−ΔωFts) …(31)
後輪左右輪間の差動回転数偏差εpRr=ΔωRr−ΔωRrt
−(ΔωRrt−ΔωRrs) …(32)
【0082】
そして、この偏差比例制御によるクラッチトルクTpcctrf、Tpcctrr、TpcFt、TpcRrは、それぞれ以下のように算出される。
まず、前後軸間の差動回転数偏差εpctrfを用いた偏差比例制御によるクラッチトルクTpcctrfは、
εpctrf>0の場合、Tpcctrf=kp1・εpctrf+kp2・Δωctrf
εpctrf≦0の場合、Tpcctrf=kp2・Δωctrf
【0083】
次に、前後軸間の差動回転数偏差εpctrrを用いた偏差比例制御によるクラッチトルクTpcctrrは、
εpctrr>0の場合、Tpcctrr=kp1・εpctrr+kp2・Δωctrr
εpctrr≦0の場合、Tpcctrr=kp2・Δωctrr
【0084】
次に、前輪左右輪間の差動回転数偏差εpFtを用いた偏差比例制御によるクラッチトルクTpcFtは、
εpFt>0の場合、TpcFt=kp1・εpFt+ΔωFt
εpFt≦0の場合、TpcFt=ΔωFt
【0085】
次に、後輪左右輪間の差動回転数偏差εpRrを用いた偏差比例制御によるクラッチトルクTpcRrは、
εpRr>0の場合、TpcRr=kp1・εpRr+ΔωRr
εpRr≦0の場合、TpcRr=ΔωRr
ここで、kp1は第1の比例項ゲイン、kp2は第2の比例項ゲインである。
【0086】
また、上述の偏差比例制御による各クラッチトルクTpcctrf、Tpcctrr、TpcFt、TpcRrは、ブレーキスイッチのON信号が入力された場合、このブレーキ状態との干渉を避けるため、それぞれ0に設定される。
【0087】
こうして、偏差比例制御クラッチトルク演算部50jで演算された各クラッチトルクTpcctrf、Tpcctrr、TpcFt、TpcRrは、クラッチトルク演算部50kに出力される。
【0088】
クラッチトルク演算部50kは、ABS制御装置37からABSの作動状態を示す信号が、ブレーキスイッチディレイ処理部50cからディレイ処理されたブレーキスイッチ信号が、スライディングモード制御クラッチトルク演算部50iから各クラッチトルクTSMCctrf、TSMCctrr、TSMCFt、TSMCRrが、偏差比例制御クラッチトルク演算部50jから各クラッチトルクTpcctrf、Tpcctrr、TpcFt、TpcRrが入力される。
【0089】
そして、以下のように、それぞれに対応した4つのクラッチトルクTctrf、Tctrr、TFt、TRrを和算により求め、得られたトルクの最大値を最終的なトランスファクラッチ21のトルクTcdとして設定し、このクラッチトルクTcdとなるようにセンタデフクラッチ駆動部51に制御信号を出力する。
すなわち、
Tctrf=TSMCctrf+Tpcctrf
Tctrr=TSMCctrr+Tpcctrr
TFt=TSMCFt+TpcFt
TRr=TSMCRr+TpcRr
Tcd=MAX(Tctrf,Tctrr,TFt,TRr) …(33)
【0090】
ここで、ABS制御装置37からON信号、すなわちABS作動中の信号がある場合は、ABS制御との干渉を防止するため、クラッチトルクTcdは、予め設定しておいた一定値CABSとする。また、ブレーキスイッチディレイ処理部50cからブレーキスイッチのON信号がある場合も、このブレーキ状態との干渉を防止するため、クラッチトルクTcdは、予め設定しておいた一定値Cbrkとする。
【0091】
このように、本発明の実施の形態においては、スライディングモード制御クラッチトルク演算部50i、偏差比例制御クラッチトルク演算部50j、及び、クラッチトルク演算出力部50kでクラッチトルク演算手段が主要に構成されている。
【0092】
尚、本発明の実施の形態においては、4つのクラッチトルクTctrf、Tctrr、TFt、TRrを演算し、これらの最大値を最終的なトランスファクラッチ21の締結トルクとなるように制御しているが、車両仕様によっては、これら4つ全てではなく、何れか1つ、或いは、何れか複数のクラッチトルクを求めて、最終的なトランスファクラッチ21の締結トルクとなるように制御するようにしても良い。
【0093】
また、本発明の実施の形態では、センタデファレンシャル装置3の差動制限を制御するトランスファクラッチ21の制御を例に説明しているが、センタデファレンシャル装置3の無い4輪駆動車の前後軸間の差動制限制御を行うクラッチに対しても同様に適応できる。更に、フロントデフクラッチ27や、リヤデフクラッチ23において、そのクラッチトルクを制御する装置を有する場合、本実施の形態で説明したスライディングモード制御を用いたクラッチトルクの設定が、これらクラッチトルクの設定に適応できることは云うまでもない。
【0094】
また、本発明の実施の形態においては、スライディングモード制御クラッチトルク演算部50iからの各クラッチトルクTSMCctrf、TSMCctrr、TSMCFt、TSMCRrに、偏差比例制御クラッチトルク演算部50jからの各クラッチトルクTpcctrf、Tpcctrr、TpcFt、TpcRrを和して最終的な4つのクラッチトルクTctrf、Tctrr、TFt、TRrを求めるようにしているが、偏差比例制御クラッチトルク演算部50jからの各クラッチトルクTpcctrf、Tpcctrr、TpcFt、TpcRrの影響が小さい車両等では、スライディングモード制御クラッチトルク演算部50iからの各クラッチトルクTSMCctrf、TSMCctrr、TSMCFt、TSMCRrのみを最終的な4つのクラッチトルクTctrf、Tctrr、TFt、TRrとしても良い。
【0095】
【発明の効果】
以上、説明したように本発明によれば、システム全体のコストアップやシステムの複雑化を生じることなく、高精度でレスポンスの良いトラクション性能を実現することが可能となる。
【図面の簡単な説明】
【図1】車両の駆動系とセンタデファレンシャル差動制限制御部の概略説明図
【図2】センタデファレンシャル差動制限制御部の機能ブロック図
【図3】エンジン出力特性のマップの一例を示す説明図
【図4】車速と前後軸間制御開始差動回転数の基本値マップの一例を示す説明図
【図5】横加速度に基づく前後軸間制御開始差動回転数の補正係数マップの一例を示す説明図
【図6】センタデフ入力トルクに基づく前後軸間制御開始差動回転数の補正係数マップの一例を示す説明図
【図7】ダイヤル位置に基づく前後軸間制御開始差動回転数の補正係数マップの一例を示す説明図
【符号の説明】
3 センタデファレンシャル装置
14FL、14FR 左右前輪
14RL、14RR 左右後輪
21 トランスファクラッチ(クラッチ手段)
31FL、31FR 前輪側左右車輪速センサ
31RL、31RR 後輪側左右車輪速センサ
50 センタデファレンシャル差動制限制御部
50d 前後軸実差動回転数演算部(実差動回転数検出手段)
50e 前輪側左右実差動回転数演算部(実差動回転数検出手段)
50f 後輪側左右実差動回転数演算部(実差動回転数検出手段)
50g 制御開始差動回転数演算部(目標差動回転数設定手段)
50h 目標差動回転数設定部(目標差動回転数設定手段)
50i スライディングモード制御クラッチトルク演算部(クラッチトルク演算手段)
50j 偏差比例制御クラッチトルク演算部(クラッチトルク演算手段)
50k クラッチトルク演算出力部(クラッチトルク演算手段)
51 センタデフクラッチ駆動部
Claims (9)
- 一方の回転軸と他方の回転軸との間に介装し、上記一方の回転軸と上記他方の回転軸との間の駆動力の伝達を可変自在なクラッチ手段を備えた車両の差動制限制御装置において、
上記一方の回転軸と上記他方の回転軸との間の目標とする差動回転数を設定する目標差動回転数設定手段と、
上記一方の回転軸と上記他方の回転軸との間の実際の差動回転数を検出する実差動回転数検出手段と、
上記目標とする差動回転数と上記実際の差動回転数との偏差を求め、少なくとも該偏差の積分項に関する極性を用いて切り替え関数を構成し、スライディングモード制御を適応して上記クラッチ手段の締結力を演算するクラッチトルク演算手段とを備え、
上記クラッチトルク演算手段における上記切り替え関数は、上記極性の値に所定のゲインを乗算した値に、上記目標とする差動回転数と上記実際の差動回転数との偏差の微分項に所定のゲインを乗算した値を加算したものであることを特徴とする車両の差動制限制御装置。 - 上記クラッチトルク演算手段は、上記スライディングモード制御により演算した上記クラッチ手段の締結力に、上記目標とする差動回転数と上記実際の差動回転数との偏差の比例項に所定のゲインを乗算した値を加算して、最終的な上記クラッチ手段の締結力を演算することを特徴とする請求項1記載の車両の差動制限制御装置。
- 一方の回転軸と他方の回転軸との間に介装し、上記一方の回転軸と上記他方の回転軸との間の駆動力の伝達を可変自在なクラッチ手段を備えた車両の差動制限制御装置において、
上記一方の回転軸と上記他方の回転軸との間の目標とする差動回転数を設定する目標差動回転数設定手段と、
上記一方の回転軸と上記他方の回転軸との間の実際の差動回転数を検出する実差動回転数検出手段と、
少なくとも上記目標とする差動回転数と上記実際の差動回転数との偏差に基づいた積分項を用いて算出した極性の値に所定のゲインを乗算した項を有する切り替え関数を構成し、該切り替え関数が正の値の時に上記切り替え関数の値を制御値とするスライディングモード制御を用いて上記クラッチ手段の締結力を演算するクラッチトルク演算手段と、
を備えたことを特徴とする車両の差動制限制御装置。 - 上記クラッチトルク演算手段における上記切り替え関数は、上記極性の値に所定のゲインを乗算した項に、上記目標とする差動回転数と上記実際の差動回転数とに基づいた微分項に所定のゲインを乗算した項を加算したものであることを特徴とする請求項3記載の車両の差動制限制御装置。
- 上記クラッチトルク演算手段は、上記スライディングモード制御により演算した上記クラッチ手段の締結力に、上記目標とする差動回転数と上記実際の差動回転数とに基づいた比例制御により算出した上記クラッチ手段の締結力を加算して、最終的な上記クラッチ手段の締結力を演算することを特徴とする請求項3又は請求項4記載の車両の差動制限制御装置。
- 上記クラッチ手段は、左右輪間に介装するデファレンシャル装置の差動を制限するクラッチ手段であって、
上記目標差動回転数設定手段は、上記左右輪間の目標とする差動回転数を設定し、
上記実差動回転数検出手段は、上記左右輪間の実際の差動回転数を検出し、
上記クラッチトルク演算手段は、上記目標差動回転数設定手段で設定した目標とする差動回転数と、上記実差動回転数検出手段で検出した実際の差動回転数との偏差を用いて上記クラッチ手段の締結力を演算することを特徴とする請求項1、3、4の何れか一つに記載の車両の差動制限制御装置。 - 上記目標差動回転数設定手段は、予め車速と横加速度と上記クラッチ手段への入力トルクの少なくとも一つに応じて上記実際の差動回転数の下限値を設定し、この下限値を基に上記目標とする差動回転数を設定することを特徴とする請求項1、3、4の何れか一つに記載の車両の差動制限制御装置。
- 上記目標差動回転数設定手段は、設定する上記目標とする差動回転数が選択的に可変自在であることを特徴とする請求項1、3、4の何れか一つに記載の車両の差動制限制御装置。
- 上記クラッチトルク演算手段は、ブレーキ作動時とアンチロックブレーキ作動時の少なくともどちらかの場合は、上記クラッチ手段の締結力を予め設定しておいた値とすることを特徴とする請求項1、3、4の何れか一つに記載の車両の差動制限制御装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002278130A JP4263448B2 (ja) | 2002-09-24 | 2002-09-24 | 車両の差動制限制御装置 |
| US10/667,393 US7386383B2 (en) | 2002-09-24 | 2003-09-23 | Differential limiting control apparatus for a vehicle and the method thereof |
| DE60301602T DE60301602T2 (de) | 2002-09-24 | 2003-09-24 | Steuervorrichtung zur Differentialbegrenzung eines Kraftfahrzeugs und Verfahren dafür |
| EP03255997A EP1403125B1 (en) | 2002-09-24 | 2003-09-24 | Differential limiting control apparatus for a vehicle and the method thereof |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002278130A JP4263448B2 (ja) | 2002-09-24 | 2002-09-24 | 車両の差動制限制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004114764A JP2004114764A (ja) | 2004-04-15 |
| JP4263448B2 true JP4263448B2 (ja) | 2009-05-13 |
Family
ID=31973259
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002278130A Expired - Fee Related JP4263448B2 (ja) | 2002-09-24 | 2002-09-24 | 車両の差動制限制御装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US7386383B2 (ja) |
| EP (1) | EP1403125B1 (ja) |
| JP (1) | JP4263448B2 (ja) |
| DE (1) | DE60301602T2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9518515B2 (en) | 2011-08-09 | 2016-12-13 | Toyota Jidosha Kabushiki Kaisha | Sliding mode controller and internal combustion engine system control device |
Families Citing this family (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6882922B2 (en) * | 2000-10-11 | 2005-04-19 | Visteon Global Technologies, Inc. | Torque-biasing system |
| US20050038588A1 (en) * | 2003-08-14 | 2005-02-17 | Deepak Shukla | Vehicle driving force control method |
| JP4554252B2 (ja) * | 2004-03-31 | 2010-09-29 | 本田技研工業株式会社 | 4輪駆動車両の制御方法 |
| EP1582390B1 (en) * | 2004-03-31 | 2009-10-07 | Honda Motor Co., Ltd. | Drive force control method for four-wheel drive vehicle |
| JP4289243B2 (ja) * | 2004-07-16 | 2009-07-01 | 三菱自動車工業株式会社 | 車両用左右輪間駆動力制御装置 |
| DE102004037196A1 (de) * | 2004-07-30 | 2006-03-23 | Zf Friedrichshafen Ag | Verfahren zur automatischen Betätigung von Längssperren bei allradgetriebenen Fahrzeugen, insbesondere bei Arbeitsmaschinen und Einsatzfahrzeugen |
| JP4317808B2 (ja) * | 2004-10-25 | 2009-08-19 | 日産自動車株式会社 | 自動変速機の制御装置 |
| US20060154776A1 (en) * | 2005-01-08 | 2006-07-13 | Claussen Stephen P | Automated inter-axle differential locking system |
| EP1954518B1 (en) * | 2005-12-02 | 2010-10-20 | Haldex Traction AB | Method and system for regulating vehicle dynamics |
| US7600598B2 (en) * | 2006-05-05 | 2009-10-13 | Ford Global Technologies, Llc | Biasing drive torque to a secondary axle in a motor vehicle powertrain |
| US20080140264A1 (en) * | 2006-12-08 | 2008-06-12 | O'dea Kevin A | Method for providing stability control for a vehicle |
| JP4264761B2 (ja) | 2007-08-30 | 2009-05-20 | 三菱自動車工業株式会社 | 駆動力配分制御装置 |
| US9296295B2 (en) * | 2008-12-22 | 2016-03-29 | Caterpillar Inc. | Machine control system utilizing inertial yaw sensor |
| US9126480B2 (en) * | 2008-12-22 | 2015-09-08 | Caterpillar Inc. | Machine control system utilizing inertial yaw sensor |
| US20110269595A1 (en) | 2010-04-30 | 2011-11-03 | American Axle & Manufacturing Inc. | Control strategy for operating a locking differential |
| JP5720165B2 (ja) * | 2010-10-05 | 2015-05-20 | 株式会社ジェイテクト | 四輪駆動車 |
| CN103847741A (zh) * | 2012-12-04 | 2014-06-11 | 光阳工业股份有限公司 | 四轮车辆的车轮驱动控制系统及其车轮驱动控制方法 |
| DE102017219271A1 (de) * | 2017-10-26 | 2019-05-02 | Deere & Company | Verfahren zum Betreiben eines Nutzfahrzeugs mit Allradantrieb und Differentialsperre |
| DE102018204570A1 (de) * | 2018-03-26 | 2019-09-26 | Magna powertrain gmbh & co kg | Antriebsstrang |
| CN113353061A (zh) * | 2021-07-14 | 2021-09-07 | 广东工业大学 | 一种基于滑模控制的四电机驱动fsae赛车电子差速算法 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02297602A (ja) * | 1989-05-12 | 1990-12-10 | Fanuc Ltd | 非線形項補償を含むスライディングモード制御方式 |
| US5090510A (en) * | 1989-09-30 | 1992-02-25 | Mazda Motor Corporation | Drive control system of four-wheel drive vehicle |
| DE4100372A1 (de) | 1991-01-09 | 1992-07-16 | Fichtel & Sachs Ag | Anordnung zur regelung des schlupfs einer automatisierten reibungskupplung |
| ES2067118T3 (es) | 1991-10-21 | 1995-03-16 | Steyr Daimler Puch Ag | Procedimiento para controlar el embrague hidraulico de friccion de un sistema para la distribucion de la fuerza de accionamiento de un automovil con accionamiento a todas las ruedas y sistema de embrague hidraulico de friccion. |
| JP3416970B2 (ja) | 1993-01-19 | 2003-06-16 | 日産自動車株式会社 | 車両のヨーイング運動量制御装置 |
| US5439428A (en) | 1994-02-22 | 1995-08-08 | Eaton Corporation | Method and apparatus for robust automatic clutch control with pid regulation |
| JP3409537B2 (ja) | 1995-10-19 | 2003-05-26 | 日産自動車株式会社 | 車両の四輪駆動制御装置 |
| JPH09242575A (ja) * | 1996-03-07 | 1997-09-16 | Toyota Motor Corp | 四輪駆動車の挙動制御装置 |
| JP3822753B2 (ja) * | 1998-07-07 | 2006-09-20 | トヨタ自動車株式会社 | 車輌の車輪速度制御方法 |
| JP2001260836A (ja) | 2000-03-23 | 2001-09-26 | Toyota Motor Corp | 車両用駆動力配分制御装置 |
| JP4237378B2 (ja) * | 2000-06-29 | 2009-03-11 | 富士重工業株式会社 | 車両の駆動力伝達制御装置 |
| JP4456748B2 (ja) * | 2000-10-27 | 2010-04-28 | 富士重工業株式会社 | 4輪駆動車の動力配分制御装置 |
| JP4294286B2 (ja) | 2002-09-24 | 2009-07-08 | 富士重工業株式会社 | 車両の差動制限制御装置 |
-
2002
- 2002-09-24 JP JP2002278130A patent/JP4263448B2/ja not_active Expired - Fee Related
-
2003
- 2003-09-23 US US10/667,393 patent/US7386383B2/en not_active Expired - Fee Related
- 2003-09-24 DE DE60301602T patent/DE60301602T2/de not_active Expired - Lifetime
- 2003-09-24 EP EP03255997A patent/EP1403125B1/en not_active Expired - Fee Related
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9518515B2 (en) | 2011-08-09 | 2016-12-13 | Toyota Jidosha Kabushiki Kaisha | Sliding mode controller and internal combustion engine system control device |
Also Published As
| Publication number | Publication date |
|---|---|
| EP1403125A2 (en) | 2004-03-31 |
| US7386383B2 (en) | 2008-06-10 |
| DE60301602D1 (de) | 2005-10-20 |
| US20040059491A1 (en) | 2004-03-25 |
| EP1403125A3 (en) | 2004-04-21 |
| EP1403125B1 (en) | 2005-09-14 |
| JP2004114764A (ja) | 2004-04-15 |
| DE60301602T2 (de) | 2006-06-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4263448B2 (ja) | 車両の差動制限制御装置 | |
| JP4294286B2 (ja) | 車両の差動制限制御装置 | |
| JP2760865B2 (ja) | 四輪駆動車のトラクション制御装置 | |
| JP4615321B2 (ja) | 4輪駆動車の制御装置 | |
| JP2615085B2 (ja) | 4輪駆動車のトラクション制御装置 | |
| JP2528485B2 (ja) | 四輪駆動車の駆動力配分制御装置 | |
| US8489304B2 (en) | Torque distribution control apparatus for four-wheel drive vehicle | |
| JP4263441B2 (ja) | 4輪駆動車の制御装置 | |
| JPH0680047A (ja) | 前後輪駆動力配分とトラクションとの総合制御装置 | |
| JP2860340B2 (ja) | 左右輪トルク配分制御装置 | |
| JP4265891B2 (ja) | 車両の駆動力伝達制御装置 | |
| JP4223255B2 (ja) | 4輪駆動車のスリップ制御装置 | |
| JP3144717B2 (ja) | 4輪駆動車のトルク配分制御方法 | |
| JP4263459B2 (ja) | 車両の差動制限制御装置 | |
| JP7331467B2 (ja) | 四輪駆動車 | |
| JP3978569B2 (ja) | 車両用駆動力配分装置 | |
| JP4000438B2 (ja) | 車両用差動制限装置 | |
| JP2612718B2 (ja) | 4輪駆動車のトルクスプリット制御装置 | |
| JP2848107B2 (ja) | 車両用差動制限制御装置 | |
| JP2002087102A (ja) | 車両用差動制限装置 | |
| JP2629912B2 (ja) | 車両の加速スリップ防止装置 | |
| JP2002096651A (ja) | 車両用差動制限装置 | |
| JP2001071776A (ja) | 差動制限制御方法および制御装置 | |
| JP2615084B2 (ja) | 4輪駆動車のトルクスプリット制御装置 | |
| JPH06270708A (ja) | 車両の差動制限装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050805 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20080501 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080805 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20081001 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090127 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090212 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120220 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120220 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130220 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140220 Year of fee payment: 5 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |