JP4241663B2 - 画像読取装置 - Google Patents
画像読取装置 Download PDFInfo
- Publication number
- JP4241663B2 JP4241663B2 JP2005129481A JP2005129481A JP4241663B2 JP 4241663 B2 JP4241663 B2 JP 4241663B2 JP 2005129481 A JP2005129481 A JP 2005129481A JP 2005129481 A JP2005129481 A JP 2005129481A JP 4241663 B2 JP4241663 B2 JP 4241663B2
- Authority
- JP
- Japan
- Prior art keywords
- pulley
- wire
- phosphor plate
- image reading
- reading apparatus
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- OAICVXFJPJFONN-UHFFFAOYSA-N Phosphorus Chemical compound [P] OAICVXFJPJFONN-UHFFFAOYSA-N 0.000 claims description 89
- 230000003287 optical effect Effects 0.000 claims description 44
- 230000005284 excitation Effects 0.000 claims description 16
- 239000000463 material Substances 0.000 claims description 13
- 238000001514 detection method Methods 0.000 claims description 11
- 230000001678 irradiating effect Effects 0.000 claims description 10
- 238000004020 luminiscence type Methods 0.000 claims description 4
- 230000005855 radiation Effects 0.000 description 16
- 238000000034 method Methods 0.000 description 11
- 230000007723 transport mechanism Effects 0.000 description 8
- GGCZERPQGJTIQP-UHFFFAOYSA-N sodium;9,10-dioxoanthracene-2-sulfonic acid Chemical compound [Na+].C1=CC=C2C(=O)C3=CC(S(=O)(=O)O)=CC=C3C(=O)C2=C1 GGCZERPQGJTIQP-UHFFFAOYSA-N 0.000 description 4
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 2
- 230000006866 deterioration Effects 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 239000011347 resin Substances 0.000 description 2
- 229920005989 resin Polymers 0.000 description 2
- 230000004936 stimulating effect Effects 0.000 description 2
- 239000004677 Nylon Substances 0.000 description 1
- 229910000831 Steel Inorganic materials 0.000 description 1
- 238000010521 absorption reaction Methods 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 238000003745 diagnosis Methods 0.000 description 1
- 201000010099 disease Diseases 0.000 description 1
- 208000037265 diseases, disorders, signs and symptoms Diseases 0.000 description 1
- 229910052742 iron Inorganic materials 0.000 description 1
- 229910052751 metal Inorganic materials 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 229920001778 nylon Polymers 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 229910001220 stainless steel Inorganic materials 0.000 description 1
- 239000010935 stainless steel Substances 0.000 description 1
- 239000010959 steel Substances 0.000 description 1
- 238000002834 transmittance Methods 0.000 description 1
- 238000012800 visualization Methods 0.000 description 1
- 238000004804 winding Methods 0.000 description 1
Images




Landscapes
- Facsimile Scanning Arrangements (AREA)
- Radiography Using Non-Light Waves (AREA)
Description
この手法の一例としては、患者などの被写体を透過した放射線を蛍光体に吸収せしめ、しかる後、この蛍光体を例えば、光又は熱エネルギーで励起することによりこの蛍光体が上記吸収により蓄積している放射線エネルギーを蛍光として放射せしめ、この蛍光を検出して画像化するものがある。支持体上に輝尽性蛍光体層を形成した輝尽性蛍光体プレートを使用するもので、この輝尽性蛍光体プレートの輝尽性蛍光体層に被写体を透過した放射線を当てて、被写体各部の放射線透過度に対応する放射線エネルギーを蓄積させて潜像を形成し、しかる後に、この輝尽性蛍光体層を輝尽励起光で走査することによって、各部の蓄積された放射線エネルギーを放射させて、これを光に変換し、この光の強弱をフォトマルなどの光電変換手段を介して画像信号に変換して、デジタル画像データとして放射線画像を得るものである。
このようなデジタル画像データに基づいて、銀塩フィルムに画像形成が行われ、あるいはCRT等に画像が出力されて可視化される。また、デジタル画像データは、半導体記憶装置、磁気記憶装置、光ディスク記憶装置等の画像記憶装置に格納され、その後、必要に応じてこれら画像記憶装置から取り出されて銀塩フィルム、CRT等を介して可視化されることができる。
本発明は、上記事情に鑑みてなされたもので、等速性を向上させ、画像ムラの無い良好な診断画像を得ることのできる画像読取装置を提供することを目的としている。
前記輝尽性蛍光体プレートに光源からの励起光を走査させながら照射して前記輝尽性蛍光体プレートから発せられる輝尽発光光を集光し光電変換させて画像情報を読み取る光学ユニットと、
前記光学ユニットを移動するリニアモータと、
前記光学ユニットの移動に伴い、ワイヤを介して回転せしめられるプーリと、
前記プーリの回転速度を検出するロータリエンコーダと、
前記ロータリエンコーダの検出結果から前記リニアモータを制御する制御手段とを備え、
前記ワイヤは、前記プーリの回転軸に直交する直交線に対して、所定角度となるように傾斜させて、前記プーリの軸回りに1回転以上巻き付けられていることを特徴とする。
前記輝尽性蛍光体プレートに光源からの励起光を走査させながら照射して前記輝尽性蛍光体プレートから発せられる輝尽発光光を集光し光電変換させて画像情報を読み取る光学ユニットと、
前記輝尽性蛍光体プレートを移動するリニアモータと、
前記輝尽性蛍光体プレートとともに移動するワイヤと、
前記輝尽性蛍光体プレートの移動がワイヤを介して伝達されることによって回転するプーリと、
前記プーリの回転速度を検出するロータリエンコーダと、
前記ロータリエンコーダの検出結果から前記リニアモータを制御する制御手段とを備え、
前記ワイヤは、前記プーリの回転軸に直交する直交線に対して、所定角度となるように傾斜させて、前記プーリの軸回りに1回転以上巻き付けられていることを特徴とする。
これに伴ってワイヤを介してプーリが回転し、その回転速度をロータリエンコーダによって検出する。そして、制御手段によって輝尽性蛍光体プレートの移動が等速度となるようにリニアモータが制御される。また、ワイヤは、プーリの回転軸に直交する直交線に対して所定角度となるように傾斜させて1回転以上巻き付けられているので、ワイヤ同士の擦れが発生することがなく、プーリへの負荷変動を抑制することができるので、プーリをより等速に回転させることができる。また、ワイヤ同士の擦れが発生しないことから、ワイヤ自身の耐久性も向上させることができる。
前記所定角度をθとすると、下記式の関係で前記ワイヤが前記プーリの軸回りに巻き付けられていることを特徴とする。
θ≧tan-1(2r/2πR)
r:ワイヤの半径、R:プーリの半径
前記ロータリエンコーダの回転軸とプーリとが一体的な形状をなしていることを特徴とする。
前記プーリの材質の表面硬度は、ワイヤの材質の表面硬度以上であることを特徴とする。
請求項6の発明は、請求項1〜5のいずれか一項に記載の画像読取装置において、
前記ワイヤの両端部が画像読取装置内の非稼働部に固定されていることを特徴とする。
なお、本発明において、輝尽性蛍光体シートは単体では剛性が無く、装置内での取り扱いが難しいため、輝尽性蛍光体シートを単体で扱うことは少なく、多くの場合は金属板や樹脂板などの支持体に貼付したり、カセッテと呼ばれる着脱自在のケースに収納してカセッテ内面に接着するなどして支持している。このように、輝尽性蛍光体シートが上記支持体やカセッテに支持された構成を以下の説明では輝尽性蛍光体プレートと呼ぶこととする。また、この輝尽性蛍光体プレートは、その支持体側がラバーマグネット等で固定板に取り付けられることにより支持されている。
この輝尽性蛍光体プレートは、撮影時に被写体を透過した放射線が吸収され、そのエネルギーの一部が輝尽性蛍光体中の放射線画像の情報として蓄積される。本発明に係る画像読取装置は、このような輝尽性蛍光体中に蓄積された放射線画像の情報を読み取る装置である。
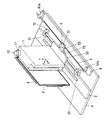
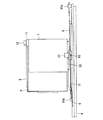
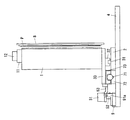
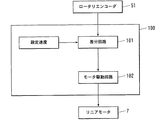
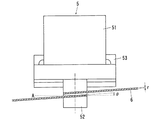
図1は、本発明の第1の実施の形態の画像読取装置における搬送機構の斜視図、図2は、図1におけるX−Z平面図、図3は、図1におけるX−Y平面図、図4は、図1におけるY−Z平面図、図5は、速度制御部を示すブロック図である。
図1〜図4に示すように、画像読取装置は、輝尽性蛍光体プレートPにレーザ光照射装置(光源)(図示しない)からのレーザ光(励起光)を走査しながら照射して輝尽性蛍光体プレートPから発せられる輝尽発光光を集光し、光電変換させて画像情報を読み取る光学ユニット1と、基台4上に設けられて光学ユニット1を水平方向に移動可能に支持する支持部材2と、光学ユニット1を移動させるリニアモータ7と、支持部材2に設けられて光学ユニット1を水平方向に案内するガイドレール31とを備えている。
また、光学ユニット1が取り付けられた移動板33に連結し、光学ユニット1とともに移動するワイヤ6及びロータリエンコーダユニット5と、光学ユニット1の移動がワイヤ6を介して伝達されて回転するプーリ52と、プーリ52の回転速度を検出するロータリエンコーダ51と、ロータリエンコーダ51の検出結果と予め設定された設定速度とを比較することによってリニアモータ7を制御する速度制御部(制御手段)100とを備えている。
以下、各構成部材について詳細に説明する。
また、この輝尽性蛍光体プレートPに対向して光学ユニット1が配置されており、光学ユニット1は、下面に取り付けられた移動板33が基台4に対して移動可能に設けられ、これによって光学ユニット1は基台4に対して移動可能とされている。
ガイドレール31は断面視略矩形状の棒状部材であって、図4に示すように、ガイドレール31に案内される断面視略コ字型状の被ガイド部材32が係合している。そして、被ガイド部材32は移動板33の下面に取り付けられている。
このように、光学ユニット1は、支持部材2、ガイドレール31、被ガイド部材32、移動板33等によって基台4上に支持されており、輝尽性蛍光体プレートPに対向して配置されている。
また、マグネット部71には、リニアモータ7を構成する可動コイル73が設けられている。可動コイル73は円筒状に形成されたコイルを有しており、コイルは箱状のカバー部材により覆われている。そして、可動コイル73が移動板33の下面に設けられており、リニアモータ7は可動コイル73の中心をマグネット部71が貫通するように構成されている。
θ≧tan-1(2r/2πR) …式(1)
r:ワイヤの半径、R:プーリの半径
このような関係でプーリ52にワイヤ6を巻き付けることにより、プーリ52上でワイヤ6同士が接触することがなく、ワイヤ6同士の擦れの発生を防止することができる。
また、ワイヤ6は、所定の張力となるように固定部材91a、91bによって調整されている。
プーリ52の材質としては、鉄材又はステンレス材が好ましく、ワイヤ6の材質としてはプーリ52の材質の表面硬度以下の材料を使用することが好ましく、例えばステンレス材上にナイロン等の樹脂をコーティングしたものを使用することが好ましい。このように
プーリ52の材質の表面硬度をワイヤ6の材質の表面硬度以上とすることにより、プーリ52の摩耗を抑制することができ、プーリ52自身の耐久性を向上させることができるとともに摩耗による等速回転の悪化を抑制することができる。
搬送手段によって輝尽性蛍光体プレートPが画像読取装置の内部に取り込まれて、固定板8に固定される。画像の読取処理を行う際には、まず、リニアモータ7を駆動させて、光学ユニット1を支持する移動板33をガイドレール31に沿って水平方向に移動させる。
これにより、光学ユニット1が輝尽性蛍光体プレートPのレーザ照射面に対向する位置まで移動され、輝尽性蛍光体プレートPの水平方向に沿って移動しながら、レーザ光照射装置からレーザ光が走査される。このときレーザ光は光学ユニット1の移動方向と直交する方向に走査させながら照射される。その結果、励起された輝尽発光光が導光板13により導かれて集光管11に集光され、光電変換器12によって電気信号に変換される。
このように光学ユニット1が水平方向に移動することによって、移動板33に設けられたロータリエンコーダユニット5の支持台53を介してワイヤ6にその移動が伝達されて、プーリ52及びロータリエンコーダ51の回転軸が回転する。この際に、プーリ52にワイヤ6が、上記式(1)の条件で1回転以上巻き付けられているので、ワイヤ6がプーリ52上で接触することがなく、プーリ6を安定して定速に回転させることができる。これに伴って回転軸に連結されたロータリエンコーダ51でその回転速度が検出され、その検出結果は速度制御部100に出力される。
このようにロータリエンコーダ51の回転速度を常に検出し、その検出結果に基づいてリニアモータ7の移動速度を制御することによって、輝尽性蛍光体プレートPの移動速度を一定に保つことができる。よって、輝尽性蛍光体プレートPに蓄積された放射線エネルギーを均一に励起して、画像ムラの無い、良好な画像を得ることができる。
その後、図示しない消去装置によって、輝尽性蛍光体プレートPに対して消去光を照射させ、これにより輝尽性蛍光体プレートPに残存する放射線画像を消去させる。そして、さらに搬送手段によって輝尽性蛍光体プレートPを画像読取装置の外部へと搬送させる。
また、ワイヤ6同士の擦れが発生しないことから、ワイヤ6自身の耐久性も向上させることができる。
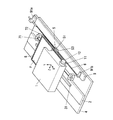
図7は、本発明の第2の実施の形態の画像読取装置における搬送機構の斜視図、図8は、図7におけるX−Z平面図、図9は、図7におけるX−Y平面図、図10は、図7におけるY−Z平面図である。
本発明の第2の実施の形態の画像読取装置は、第1の実施の形態と異なり、光学ユニット1が基台4に固定され、輝尽性蛍光体プレートPが水平方向に移動するように構成されている。
すなわち、図7〜図10に示すように、基台4の上面に対向して光学ユニット1が配置され、基台4と光学ユニット1との間に輝尽性蛍光体プレートPが配置されている。輝尽性蛍光体プレートPは、その下面に取り付けられた固定板8が、基台4に対して移動可能な移動板33に取り付けられており、これによって光学ユニット1は基台4に対して移動可能とされている。
基台4の上面の略中央に、支持部材2、支持部材2上にガイドレール31が設けられている。また、ガイドレール31には被ガイド部材32が係合し、被ガイド部材32は移動板33の下面に取り付けられている。
このように、輝尽性蛍光体プレートPは、支持部材2、ガイドレール31、被ガイド部材32、移動板33等によって基台4上に支持されており、光学ユニット1に対向して配置されている。
また、ワイヤ6はプーリ52の回転軸に直交する直交線Aに対して所定角度θとなるように傾斜した状態でプーリ52の軸回りに1回転以上巻きつけられ、所定角度θが上記式(1)の関係とされている。
搬送手段によって輝尽性蛍光体プレートPが画像読取装置の内部に取り込まれて、固定板8に固定される。画像の読取処理を行う際には、まず、リニアモータ7を駆動させて、輝尽性蛍光体プレートPを支持する移動板33をガイドレール31に沿って水平方向に移動させる。
これにより、輝尽性蛍光体プレートPが光学ユニット1のレーザ照射面に対向する位置まで移動され、光学ユニット1の水平方向に沿って移動しながら、レーザ光照射装置からレーザ光が走査される。このときレーザ光は光学ユニット1の移動方向と直交する方向に走査させながら照射される。その結果、励起された輝尽発光光が導光板13により導かれて集光管11に集光され、光電変換器12によって電気信号に変換される。
このように輝尽性蛍光体プレートPが水平方向に移動することによって、移動板33に設けられたロータリエンコーダユニット5の支持台53を介してワイヤ6にその移動が伝達されて、プーリ52及びロータリエンコーダ51の回転軸が回転する。この際に、プーリ52にワイヤ6が、上記式(1)の条件で1回転以上巻き付けられているので、ワイヤ6がプーリ52上で接触することがなく、プーリ52を安定して定速に回転させることができる。これに伴って回転軸に連結されたロータリエンコーダ51でその回転速度が検出され、その検出結果は速度制御部100に出力される。
このようにロータリエンコーダ5の回転速度を常に検出し、その検出結果に基づいてリニアモータ7の移動速度を制御することによって、輝尽性蛍光体プレートPの移動速度を一定に保つことができる。よって、輝尽性蛍光体プレートPに蓄積された放射線エネルギーを均一に励起して、画像ムラの無い、良好な画像を得ることができる。
また、ワイヤ6同士の擦れが発生しないことから、ワイヤ6自身の耐久性も向上させることができる。
例えば、ガイドレール31は断面視略矩形状の棒状部材であるとしたが、断面視略円形状等としても良い。
また、本実施の形態では、プーリ52にワイヤ6を1回転しか巻き付けていないが、複数回巻き付けるようにしても良い。この場合、固定部材91a、91bに固定するワイヤ6の両端部の高さを、さらに変えることが好ましい。
さらに、本実施の形態で使用するワイヤ6の材料としては、例えばスチールワイヤ等が挙げられるが、特に限定されるものではない。
6 ワイヤ
7 リニアモータ
51 ロータリエンコーダ
52 プーリ
100 速度制御部(制御手段)
P 輝尽性蛍光体プレート
A 直交線
Claims (6)
- 輝尽性蛍光体シートを添付した輝尽性蛍光体プレートに励起光を照射して画像情報を読み取る画像読取装置において、
前記輝尽性蛍光体プレートに光源からの励起光を走査させながら照射して前記輝尽性蛍光体プレートから発せられる輝尽発光光を集光し光電変換させて画像情報を読み取る光学ユニットと、
前記光学ユニットを移動するリニアモータと、
前記光学ユニットの移動に伴い、ワイヤを介して回転せしめられるプーリと、
前記プーリの回転速度を検出するロータリエンコーダと、
前記ロータリエンコーダの検出結果から前記リニアモータを制御する制御手段とを備え、
前記ワイヤは、前記プーリの回転軸に直交する直交線に対して、所定角度となるように傾斜させて、前記プーリの軸回りに1回転以上巻き付けられていることを特徴とする画像読取装置。 - 輝尽性蛍光体シートを添付した輝尽性蛍光体プレートに励起光を照射して画像情報を読み取る画像読取装置において、
前記輝尽性蛍光体プレートに光源からの励起光を走査させながら照射して前記輝尽性蛍光体プレートから発せられる輝尽発光光を集光し光電変換させて画像情報を読み取る光学ユニットと、
前記輝尽性蛍光体プレートを移動するリニアモータと、
前記輝尽性蛍光体プレートとともに移動するワイヤと、
前記輝尽性蛍光体プレートの移動がワイヤを介して伝達されることによって回転するプーリと、
前記プーリの回転速度を検出するロータリエンコーダと、
前記ロータリエンコーダの検出結果から前記リニアモータを制御する制御手段とを備え、
前記ワイヤは、前記プーリの回転軸に直交する直交線に対して、所定角度となるように傾斜させて、前記プーリの軸回りに1回転以上巻き付けられていることを特徴とする画像読取装置。 - 前記所定角度をθとすると、下記式の関係で前記ワイヤが前記プーリの軸回りに巻き付けられていることを特徴とする請求項1又は2に記載の画像読取装置。
θ≧tan-1(2r/2πR)
r:ワイヤの半径、R:プーリの半径 - 前記ロータリエンコーダの回転軸とプーリとが一体的な形状をなしていることを特徴とする請求項1〜3のいずれか一項に記載の画像読取装置。
- 前記プーリの材質の表面硬度は、ワイヤの材質の表面硬度以上であることを特徴とする請求項1〜4のいずれか一項に記載の画像読取装置。
- 前記ワイヤの両端部が画像読取装置内の非稼働部に固定されていることを特徴とする請求項1〜5のいずれか一項に記載の画像読取装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005129481A JP4241663B2 (ja) | 2005-04-27 | 2005-04-27 | 画像読取装置 |
| US11/912,472 US20090078893A1 (en) | 2005-04-27 | 2006-04-14 | Image reading apparatus |
| CNA2006800136912A CN101164012A (zh) | 2005-04-27 | 2006-04-14 | 图像读取装置 |
| PCT/JP2006/307900 WO2006118000A1 (ja) | 2005-04-27 | 2006-04-14 | 画像読取装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005129481A JP4241663B2 (ja) | 2005-04-27 | 2005-04-27 | 画像読取装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006308752A JP2006308752A (ja) | 2006-11-09 |
| JP4241663B2 true JP4241663B2 (ja) | 2009-03-18 |
Family
ID=37475734
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005129481A Expired - Fee Related JP4241663B2 (ja) | 2005-04-27 | 2005-04-27 | 画像読取装置 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP4241663B2 (ja) |
| CN (1) | CN101164012A (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106907447A (zh) * | 2017-04-13 | 2017-06-30 | 三峡大学 | 旋转运动转化为直线往复运动的装置 |
| JP6978124B2 (ja) * | 2018-03-31 | 2021-12-08 | つくばテクノロジー株式会社 | ドローン用x線検査装置、ドローンを用いたx線検査装置、ドローン用x線発生装置 |
-
2005
- 2005-04-27 JP JP2005129481A patent/JP4241663B2/ja not_active Expired - Fee Related
-
2006
- 2006-04-14 CN CNA2006800136912A patent/CN101164012A/zh active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| JP2006308752A (ja) | 2006-11-09 |
| CN101164012A (zh) | 2008-04-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4241663B2 (ja) | 画像読取装置 | |
| JPWO2006043425A1 (ja) | 画像読取装置 | |
| JP2007017870A (ja) | 画像読取装置及び画像形成装置 | |
| US7391044B2 (en) | Movable-component linear drive apparatus | |
| JP2007017869A (ja) | 画像読取装置及び画像形成装置 | |
| JP2006141141A (ja) | 搬送装置、画像読取装置及び画像形成装置 | |
| JP2007020083A (ja) | 画像読取装置、画像形成装置及び搬送制御方法。 | |
| JP2007193171A (ja) | 画像読取装置及び画像読取方法 | |
| JP2007279074A (ja) | 画像読取装置及び搬送装置 | |
| JP2006113169A (ja) | 画像読取装置 | |
| US20090078893A1 (en) | Image reading apparatus | |
| JP2003248276A (ja) | レーザ光走査装置及び画像読取装置 | |
| JP2006136051A (ja) | リニアモーター | |
| JP4342994B2 (ja) | 放射線画像記録読取装置並びに放射線画像記録用カセッテ | |
| JP5391136B2 (ja) | 放射線画像読取装置および画像記録体 | |
| JP2004212523A (ja) | 放射線画像読み取り装置 | |
| JP2005073042A (ja) | 画像読取装置および画像記録装置 | |
| JP2004212524A (ja) | 放射線画像読み取り装置 | |
| JP2005070533A (ja) | 移動装置、画像読取装置及び画像形成装置 | |
| JP2008122487A (ja) | 画像読取装置 | |
| JP4281951B2 (ja) | 光走査方法および装置 | |
| JP2005073023A (ja) | 画像読取装置及び画像形成装置 | |
| JP5921511B2 (ja) | 放射線画像読取装置、放射線画像読取プログラム、及び放射線画像読取方法 | |
| JP2006038975A (ja) | 医療用x線撮影装置 | |
| JP2004258304A (ja) | 画像読取装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080722 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080908 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20081209 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20081222 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120109 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |