JP4128797B2 - コイルハンドリング装置 - Google Patents
コイルハンドリング装置 Download PDFInfo
- Publication number
- JP4128797B2 JP4128797B2 JP2002141440A JP2002141440A JP4128797B2 JP 4128797 B2 JP4128797 B2 JP 4128797B2 JP 2002141440 A JP2002141440 A JP 2002141440A JP 2002141440 A JP2002141440 A JP 2002141440A JP 4128797 B2 JP4128797 B2 JP 4128797B2
- Authority
- JP
- Japan
- Prior art keywords
- coil
- arm
- fixed arm
- operating device
- carriage
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images


















Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01F—MAGNETS; INDUCTANCES; TRANSFORMERS; SELECTION OF MATERIALS FOR THEIR MAGNETIC PROPERTIES
- H01F41/00—Apparatus or processes specially adapted for manufacturing or assembling magnets, inductances or transformers; Apparatus or processes specially adapted for manufacturing materials characterised by their magnetic properties
- H01F41/02—Apparatus or processes specially adapted for manufacturing or assembling magnets, inductances or transformers; Apparatus or processes specially adapted for manufacturing materials characterised by their magnetic properties for manufacturing cores, coils, or magnets
- H01F41/04—Apparatus or processes specially adapted for manufacturing or assembling magnets, inductances or transformers; Apparatus or processes specially adapted for manufacturing materials characterised by their magnetic properties for manufacturing cores, coils, or magnets for manufacturing coils
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B21—MECHANICAL METAL-WORKING WITHOUT ESSENTIALLY REMOVING MATERIAL; PUNCHING METAL
- B21C—MANUFACTURE OF METAL SHEETS, WIRE, RODS, TUBES OR PROFILES, OTHERWISE THAN BY ROLLING; AUXILIARY OPERATIONS USED IN CONNECTION WITH METAL-WORKING WITHOUT ESSENTIALLY REMOVING MATERIAL
- B21C47/00—Winding-up, coiling or winding-off metal wire, metal band or other flexible metal material characterised by features relevant to metal processing only
- B21C47/24—Transferring coils to or from winding apparatus or to or from operative position therein; Preventing uncoiling during transfer
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B21—MECHANICAL METAL-WORKING WITHOUT ESSENTIALLY REMOVING MATERIAL; PUNCHING METAL
- B21C—MANUFACTURE OF METAL SHEETS, WIRE, RODS, TUBES OR PROFILES, OTHERWISE THAN BY ROLLING; AUXILIARY OPERATIONS USED IN CONNECTION WITH METAL-WORKING WITHOUT ESSENTIALLY REMOVING MATERIAL
- B21C47/00—Winding-up, coiling or winding-off metal wire, metal band or other flexible metal material characterised by features relevant to metal processing only
- B21C47/24—Transferring coils to or from winding apparatus or to or from operative position therein; Preventing uncoiling during transfer
- B21C47/242—Devices for swinging the coil from horizontal to vertical, or vice versa
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S414/00—Material or article handling
- Y10S414/123—Hollow cylinder handlers
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S414/00—Material or article handling
- Y10S414/124—Roll handlers
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Power Engineering (AREA)
- Manufacturing & Machinery (AREA)
- Winding, Rewinding, Material Storage Devices (AREA)
- Warehouses Or Storage Devices (AREA)
- Load-Engaging Elements For Cranes (AREA)
- Replacing, Conveying, And Pick-Finding For Filamentary Materials (AREA)
- Handcart (AREA)
- Intermediate Stations On Conveyors (AREA)
Description
【発明の属する技術分野】
本発明は、コイルハンドリング装置に関する。より特別には、本発明はコイル状に形成された材料の吊り上げ及び回転のためのコイルの操作及び輸送装置に関する。
【0002】
【従来の技術】
多くの材料がコイル状の形で供給される。例えば、プラスティック又は鋼製の紐等の紐状材料は、例えば糸巻き(spool)又はスピンドル等によりコイル状の形でしばしば供給される。
【0003】
コイル状の紐状材料の取り扱いにおいて、ほとんどのストラッピング装置では、コイルの長手方向の軸が水平方向に向く状態で、コイルが該装置に配置されることが必要である。即ち、材料がコイルの頂部又は底部から供給されるように、更にコイル状の材料が水平方向を向いて配置されたスピンドル又は軸の周りで回転可能なように、コイルは該装置に設置される。
【0004】
コイル状の紐状材料は、貯蔵及びハンドリングに関して、しばしば非常に重く、嵩張り得る。従って梱包、貯蔵及び船積みに関して、材料はそれがストラッピング装置に設置されるのと同じ方向で実施されることが望ましい。これにより、任意の船積みパレット又はコンテナからストラッピング装置へのスプールのハンドリング及び輸送が直ちに容易になる。
【0005】
この状態でのコイル状の材料の船積みに関する欠点の1つは、コイルは単一の層でのみ船積み又は梱包可能なことである。即ち、コイルがコイルの周囲に設置されるので、コイルの一層だけが実施可能である。即ち、コイルがコイル周囲に設置される場合に、コイルの1つを別の頂部に積み重ねることは不可能ではないが、実際に実施可能ではない。
【0006】
【発明が解決しようとする課題】
従って、例えば積層可能な状態で、コイルをより効率的に船積み及び格納可能にするコイルハンドリング装置に関する必要性が存在する。その様な装置は、長手方向の軸が垂直に向いた状態で、船積みされるコイルのハンドリングを可能にすることが望まれる。その様な装置は、垂直な向きから水平な向きへコイルを配置する(長手方向の軸)ために、個別のコイルに係合し且つそのコイルを操作することを促進することが最も望まれる。更に、その様な装置は積み上げられたコイルをお互いから直ちに分離し、コイルを操作して長手方向の軸を新たに向け直して、例えば紐状材料のコイルをストラッピング装置に装着するために、一つの位置から別の位置へコイルを輸送するように使用されることがより望まれる。
【0007】
コイルハンドリング装置は、直径及び長手方向の軸を形成する内面と深さを有するコイルに係合しており、長手方向の軸が垂直に向いた状態でそこにコイルを固定し更にコイルの向きを再度変えて長手方向の軸を水平に配置するように形成される。該装置は、積層される向きで船積みされて貯蔵されるコイルのハンドリングを可能にし、ストラッピング装置への取り付けのために垂直な向きから水平な向きへ長手方向の軸を配置するために、個別のコイルへの係合及びそのコイルの操作を容易にする。
【0008】
【課題を解決するための手段】
ハンドリング装置は、ベースと複数のキャスタを備える輸送アセンブリと、駆動部を具備していてそれにより運搬される荷を持ち上げるように形成されていて前記ベースに設置される吊り上げ(リフト)アセンブリと、操作アセンブリとを具備する。
【0009】
操作アセンブリは吊り上げアセンブリに設置される。操作アセンブリは、一対の離れて間隔を有する支持アームと、該支持アームにより支えられる旋回キャリッジとを具備する。該キャリッジは、コイルの深さに沿ってコイル内面に係合するための固定(ロッキング)アームと、該固定アームに対向して配置されるスラストレバーを具備する。
【0010】
スラストレバーは、お互いに鈍角に配置されるベアリングアームとレバーアームを具備する。スラストレバーは、固定アームとベアリングアームが直ちにコイルに挿入される第1の位置と、ベアリングアームがコイルの内面に向かって強制的に押されて固定アームとベアリングアームとの間にコイルを固定する、第2の位置との間で旋回動のためのキャリッジに設置される。
【0011】
キャリッジは、コイルの長手方向の軸が垂直である第1の位置と、コイルの長手方向の軸が水平である第2の位置との間で旋回する。
【0012】
現在の実施の形態において、キャリッジは、キャリッジを旋回するためにそれの端部において旋回部材を有する一対の横の支持部材を具備する。キャリッジは、横の支持部材に対して横に伸張する第1と第2のフランジアームを更に具備する。固定アームは第1のフランジアームに設置されており、スラストレバーは第2のフランジアームに設置される。
【0013】
位置決め部材は、第1のフランジアームから、固定アームに対向して伸張可能である。ベアリングアームがコイルの内面に対して強制的に押されてコイルを固定アームとベアリングアームとの間に固定し、更にベアリングアームと固定アームをコイルに挿入するために前もって決められた位置においてスラストアームを固定する場合に、スラストレバーは、位置決め部材と協働してスラストアームを固定可能である。旋回キャリッジがコイル長手方向の軸を水平に配置するように旋回される場合に、位置決め部材は、吊り上げアセンブリ上のロックと協働してコイルをハンドリング装置に固定するように形成されたリフトロックを有して更に形成されることが可能である。
【0014】
コイルをキャリッジに固定するためにフック状の突起は、固定アームの端部から伸張可能である。フック状の突起は、コイルの底面及びコイル内面の継ぎ目においてコイルに係合するためにキャリッジに取り外し可能に取り付け可能である。固定アームは、種々の寸法で製作可能であって異なる深さのコイルを収容可能である。
【0015】
1つの実施の形態において輸送アセンブリベースは、それから伸張する一対の角度が付けられたキャスタサポートを具備する。角度が付けられたキャスタサポートは、その間に開いた領域を形成する。この配置において操作アセンブリは、パレットから任意のコイルを持ち上げるために、層(layer)当たり4基のコイルの多数の層を有するパレット上にあるコイルの上に直ちに配置される。
【0016】
キャリッジのこれとは別の実施の形態は、カミング要素及び該カミング要素を駆動するためにそれに運転可能に接続されるレバーアームを具備する。カミング要素は、回転するカミングドラムとして形成されることが好ましく、レバーアームは、カミングドラムを回転させるためのハンドルとして形成されることが好ましい。カミングドラムは、固定アームとカミングドラムがコイルに挿入される第1の位置と、カミング要素がコイルに対して強制的に押されて固定アームとカミングドラムとの間でコイルを固定する第2の位置との間でのハンドルの動きにより可動である。
【0017】
固定アームは、コイルの内面に係合するように形成可能であり、カミング要素は、固定アームに対向するコイルの内面に対して支持可能である。これとは別にやはり、固定アームは、コイルの外面に係合可能であり、カミング要素は、固定アームの半径方向内側にコイルの内面に係合可能である。固定アームは、コイルの上面に沿って伸張してコイルを支持する細長い上部支持部を具備可能である。
【0018】
カミング要素がコイルの外面に係合する場合に、固定アームは、コイルの内面に係合するように更に形成可能である。
【0019】
より深くないコイルに関して、前記装置はフランジアームを具備可能である。固定アームとカミング要素はフランジアームに設置可能である。カミング要素が固定アームに対向するコイルの内面を支持する場合、及び第2の固定アームがカミング要素に対向するコイルの外面に係合する場合に、第2の固定アームはコイルの内面に係合可能である。
【0020】
本発明のこれら及び別の形態及び利点は、記載される請求項と共に以下の詳細な記述により明らかになるであろう。
【0021】
本発明の利益及び長所は、以下の詳細な説明及び添付図の検討後に、関連技術の当業者にはより直ぐに明確になるであろう。
【0022】
【発明の実施の形態】
本発明は種々の形の実施の形態で実施可能であるが、現在の好適な実施の形態について図面に示し且つ本明細書では以下に記述しており、本開示は本発明の例として考えられるべきであり、同時に本開示は本発明を、図解される特定の実施の形態に限定するようには意図されないことが理解されるべきである。本明細書のこの節の題名、いわゆる「本発明の詳細な説明」は、米国特許庁の要求に係わっており、本明細書で開示される主題を限定することを意味しないし、更に推論されるべきでもないことが更に理解されるべきである。以下、実施の形態に基づき、図面を参照して本発明の装置を詳細に説明する。
【0023】
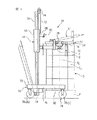
図面、特に図1−2を参照すると、本発明の基本を具体化するコイルハンドリング装置10が図示される。コイルハンドリング装置10は一般的に、操作アセンブリ12と、吊り上げアセンブリ14と、輸送アセンブリ16とを具備する。これらのアセンブリ12,14,16は、別個のものであっても良く又はお互いに一体で単一の装置に形成されても良いが、検討の容易さ及び明確さから、それらは別個で順に扱われる。
【0024】
操作アセンブリ12は、その長手方向の軸Acにより方位を定められる、材料のコイルCに係合して、上にそれ(コイルC)が積層されるその下のコイルC1から材料のコイルCを垂直方向に分離して、装置10にコイルCを固定して、更にコイル状の材料Cを回転して長手方向の軸Acを水平に向かせて配置するように形成される。本開示の目的のために、水平及び垂直なコイルが説明される場合に、この説明はコイルCの長手方向の軸Acに対してであると理解されるべきである。従って垂直のコイル又は垂直に向けられるコイルは、コイルが側部に平らに横たわっているものであり、更に水平の又は水平に向けられたコイルは、コイルが該コイルの周囲に載せられたものである。
【0025】
吊り上げアセンブリ14は、操作アセンブリ12と協働するように形成されて、それが積層されるコイルC1からコイル状のC材料を吊り上げて、固定されたコイルCを上昇させても良い。輸送アセンブリ16は同様に、操作アセンブリ12及び吊り上げアセンブリ14と協働してコイル状のC材料(それは水平又は垂直な方向のいずれかであっても良い)を輸送し、1つの位置から別へそのコイルCの材料を移動する。
【0026】
ここで図2−7を参照すると、操作アセンブリ12は、一対の長手方向に伸張する支持アーム20を有する支持部18を具備する。アーム20は中央支持部材22においてお互いに接続可能である。
【0027】
旋回する(pivoting)キャリッジ24は、支持アーム20により支持される。キャリッジ24は、支持アーム20間に伸張する少なくとも一つで好適には一対の横の部材26を具備する。現在の実施の形態において横の支持部材26は鋼製チューブである。旋回板28は、横のキャリッジ部材26の対向する端部に取り付けられており、30で指示されるように、旋回位置においてそれぞれの支持アーム20に接続する。本実施の形態において旋回(pivot)位置30は、横のキャリッジ部材26の下に配置されており(コイルCが係合されるか又は垂直である場合)、各旋回板28は一般的に、上下がひっくり返された三角形を有する。ピボット(旋回)30のより低い上昇は、コイルCがそこに負荷された場合に、キャリッジ24の旋回を容易にする。
【0028】
キャリッジ24は、一般的に32で指示される固定アセンブリを更に具備する。固定アセンブリ32は、コイルCに係合して、積層された配置S(図1)からコイルCを移動して操作アセンブリ12にコイルCを固定するように形成される。固定アセンブリ32は、第1と第2のフランジアーム34,36をそれぞれ具備しており、それらは横の支持部材26に対向するように設置される。フランジアーム34,36は、固定アセンブリ32がコイルCに係合する時に、それら(フランジアーム34,36)がコイルCの最上部の面Uに(垂直な場合)載るように形成される。現在の実施の形態においてフランジアーム34,36は、例えば溶接により管状の横の部材26に付加された鋼製のバーである。
【0029】
依存する固定アーム38は、スタッブ40に設置されて、第1のフランジアーム34から伸張する。固定アーム38は、係合面42と、アーム38の底部において係合面42に横に伸張するフック状の突起44とを具備する。係合面42は、コイルCの内面Iにおいて係合するように形成される。フック状の突起44は、コイル/内面の継ぎ目においてコイルCの底部Bに係合するように形成される。
【0030】
現状の実施の形態において固定アーム38は、例えば、例示のボルト46の様な固定具によりスタッブ40に取り外し可能に設置される。スタッブ40は、例えば溶接によりフランジアーム34に設置される鋼製のバーである。結局固定アーム38は、異なる深さDを有するコイルCを収容するために異なる長さ(l38で指示されるように)を有して製作され得る。
【0031】
スラストレバー48は、第2のフランジアーム36に設置されており、お互いに対して設置されたレバーアーム52及びベアリングアーム50として形成される、カミング要素を具備する。ベアリングアーム50及びレバーアーム52は、鈍角でお互いに対して設置される。角度αは約10度であることが好ましい。ベアリングアーム50は、一般的に51で指示されるピボットの周りの旋回動のための第2のフランジアーム36に設置される。スラストレバー48は、ベアリングアーム50が基本的に垂直である第1の位置と、レバーアーム52が基本的に水平である第2の位置との間で旋回可能である。従ってスラストレバー48は、約10度で旋回可能である。ハンドル54は、レバーアーム52の端部から伸張して、オペレータのための握る領域を提供する。現状の実施の形態においてレバーアーム52は、鋼製のバーにより形成されており、ベアリングアーム50は、サンッドイッチの配置でレバーアーム52のいずれかの側部に設置される一対のバーにより形成される。停止56は、第2のフランジアーム36の上部に設置されてレバーアーム52が水平から旋回する範囲を限定する。
【0032】
操作アセンブリ12は、特定の寸法のコイルCのために形成されて寸法が決められる。結局操作アセンブリ12は、特定の内径ID及び特定の深さDを有するコイルCによる使用のために形成される。従って、固定アーム38は、コイルCの深さDと概略等しい固定突起又はフック44に対して長さl38を有する。この状態において、コイルCが固定アーム38に係合される場合に、コイルCの内面Iにおける底部角部は、係合面42及び突起44の継ぎ目において固定アーム38に載せられる。
【0033】
スラストレバー48が、ベアリングアーム50が垂直に向く状態にある、係合していない位置(図11)にある場合に、アーム50のベアリング面58と突起44との間の距離が、操作アセンブリ12をコイルC内に挿入し得るのに十分であるように、スラストレバー48は形成される。レバーアーム52が水平に対して下方に移動される場合に(図12から分かるように、それは垂直から外れるようにベアリングアーム50を移動する)、固定アーム係合面42及びベアリングアームベアリング面58との間の距離は、その最大において、コイルCの内径IDに概略等しいように、スラストレバー48は更に形成される。
【0034】
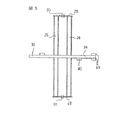
再度図3−7を参照すると位置決め部材60は、固定アーム38に対向して、それの端部付近において第1のフランジアーム34から上方に伸張する。位置決め部材60は、そこに複数の開口62a,b,cを具備しており、それらの幾つか(62a,b)はレバーアーム52内の開口64と協働するように形成される。現状の実施の形態において位置決め部材60は、サンッドイッチの配置で第1のフランジアーム34のいずれかの側部に設置された一対の鋼製のバーにより形成される。レバーアーム52は、位置決め部材を形成するバー間で動くように配置される。レバーアーム及び位置決め部材開口64と62a,bは、お互いに整列して、ピン66を受容しスラストレバー48を複数の所望の位置の1つに固定するように形成される。
【0035】
操作アセンブリ12は吊り上げアセンブリ14に設置される。図示される実施の形態において吊り上げアセンブリ14は、単純なブームタイプの吊り上げ配置を具備する。リフト(吊り上げ)キャリッジ68は、垂直に向くブーム70に沿って乗っており、ケーブル72により上下に移動させられており、そのケーブル72は、一以上のプーリー74の周りに配置されていて、例えば電動モータ、手動操作ウィンチ等のドライブ(図示されない)に運転可能に接続される、キャリッジ68に固定されて設置される。その様なブームタイプの吊り上げ装置に使用され得る種々のタイプのドライブが、当業者には分かるであろう。操作アセンブリ12は、操作アセンブリ12を昇降させるために、吊り上げアセンブリ14に設置される。
【0036】
輸送アセンブリ16は、吊り上げアセンブリ14と操作アセンブリ12を運ぶように形成される。輸送アセンブリ16は、ベース76と、ベース76に設置された複数のキャスタ又は車輪78を具備する。本形態では、4基の車輪78a−dがコイルハンドリング装置10を輸送するためのベース76に設置される。図1−2を参照すると、輸送アセンブリ16は、アセンブリ16の後端部80に設置される一対の車輪78a,bを具備する。これらの車輪78a,bは、操作アセンブリ12及び吊り上げアセンブリ14の「開発」の外部にある。結局、これらの車輪78a,bは、コイルハンドリング装置10に対して最大のサポート及び操作性を提供するために所定の位置で形成される。前部の車輪78c,dは、使用時に操作アセンブリ12の下に設置される。
【0037】
輸送アセンブリ16は、車輪又はキャスタ78c,dが依存する第1と第2の長手方向を向く支持部材82を有するように形成され得る。支持部材82は、お互いから十分間隔を有して設置されるので、パレットPの単一の積層に配置されるコイルCは、図1−2で分かるように、パレットPの任意の平らな側部を近づけることにより係合可能である。
【0038】
輸送アセンブリ116のこれとは別の実施の形態において、図8−9で分かるように、一対の角度が付けられた車輪又はキャスタアーム182は、ベース176から伸張する。キャスタアーム182は、184で指示されるようなそこの間の角度付きの領域を提供するように形成される。結局各キャスタアーム182は、ベース176の軸A176に約45度でベース176から伸張する。図8から直ちに明白なように、キャスタアーム182は、例えば、コイルCが積層されるパレットPの角部からある角度で、コイルCへのアクセスが実施可能であるように、この角度で配置される。この状態において、コイルCを装置10に係合させて固定するためのパレットPの接近を妨害する、輸送アセンブリ116の支持構造は存在しない。再度明白なように、コイルCがパレットPに単一で積層されるか(図8)又は、コイルCが単一層に多数で又はパレットPに多数層で積層される配置において、特定のタイプのコイルCに関して予想されるような(更に図9に示されるように)場合に、この角度付きのキャスタアーム182の配置により、ハンドリング装置10の使用が可能になる。
【0039】
コイルハンドリング装置10のオペレーションは、図10から16を参照して以下で説明される。図10を参照すると、コイルハンドリング装置10は、その長手方向の軸Acが垂直方向を向いて配置されるコイルCの直ぐ上の位置に移動される。装置10は、コイルCの中心上に上昇された操作アセンブリ12により位置決めされる。
【0040】
図11に図示されるように、操作アセンブリ12はその後コイルCの中心へ下げられるので、第1と第2のフランジアーム34,36は、コイルCの上面Uに載る。この事前係合された形態において、ベアリングアーム50は垂直に配置されており、レバーアーム52は水平に対して角度を有して配置される。ピン66は、位置決め部材60及びレバーアーム52の対応する開口64,62bを介して挿入可能であって、この事前係合された位置でスラストレバー48を固定する。上記のように突起又はフック44及びベアリングアーム50との間の距離d(図10)は、操作アセンブリ12をコイルCの中心に「落下」させ得るのに十分である。
【0041】
図12を参照すると、一旦操作アセンブリ12がコイルC内に正しく設置されると、92の矢印で指示されるように、ピン66は取り外されて、レバーアーム52は下方に強制的に押される。レバーアーム52が下方に強制的に押されるので、ベアリングアーム50はコイルCの内面Iを押す。このことは、コイルの積層(スタック)SのコイルCの中心から外れた部分を動かす(94の矢印で指示されるように)ので、従ってコイルCの内面Iは、固定アーム38の係合面42に隣接し、固定アームの突起44上に位置決めされる。同時に、係合面42から180度で、ベアリングアーム50はコイルCの内面Iに対して強制的に押されており、それはコイルCをベアリングアーム50と固定アーム38との間に「固定」する。この位置にある時に、レバーアーム52は水平の向きにある。ピン66はその後、レバーアーム52及び位置決め部材60の適切な開口64,62aを通り挿入されて、この係合位置で操作アセンブリ12を固定する。
【0042】
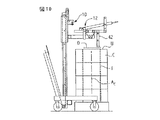
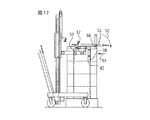
図13に示されるように、コイルCが操作アセンブリ12により十分に係合され且つ固定された状態で、吊り上げアセンブリ14はコイルCを上昇させるように駆動される。一旦コイルCが上昇させられると、それは、必要であれば、スタックSの残りのコイルから外されることが出来る。コイルCは図14で分かるようにその後下げられ得る。ここで図15を参照すると、操作アセンブリ12は、84の矢印で示されるように、90度でキャリッジ24において旋回又は回転されて、長手方向の軸Acが水平になるようにコイルCの向きを新たに設定する。一旦コイルCの向きがこの水平方向に設定されると、操作アセンブリ12は、ピン86を位置決め部材60内に形成された開口62c及びリフトロック88を通り挿入すること等により、その後この方向に固定される。これとは別に、一般的に90で図示されるバネ作動式ロックが、リフトロック88及び位置決め部材60をお互いに固定するために使用可能である。その様なバネ作動式ロック90は当業者には分かるであろう。この状態でコイルCは、コイルハンドリング装置10に固定されて、輸送可能である。
【0043】
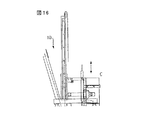
図16に示されるように、一旦この位置に設定されると、コイルCは、コイルCをストラッピング(ひも掛け)装置に配置するために必要なように上げ下げ可能である。上記のごとく、ストラッピング装置は一般的に、コイルCが長手方向の軸Acを水平に向けた状態で前記装置に配置されることを必要とする。これは、ひもがそれから自由に供給可能なように、コイルCの回転を可能にする。
【0044】
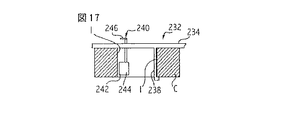
固定アセンブリのこれとは別の実施の形態は図17,18から図23,24で示される。図17,18を参照すると、固定アセンブリ232は、フランジアーム234に設置されたベアリングアセンブリ240と固定アーム238とを具備する。ベアリングアセンブリ240は、ベアリング要素242として形成された回転するカミング要素を具備する。固定アーム238は、コイルCの内面Iに係合しており、ベアリング要素242は固定アーム238に対向するコイルCの内面Iを支える。ベアリング要素242は、ドラム又は別のカミングタイプの配置(arrangement)として形成可能である。図示されるようにカミング配置は、回転のためにドラム244に偏心して配置されるか又は設置されるハンドル246として形成される、レバーアーム及びカミングドラム244を具備する。
【0045】
図19,20は固定アセンブリ332を図示しており、そこではベアリングアセンブリ340が図17,18に示されるものと同様である。この実施の形態において固定アーム338は、コイルCの外面Oに係合しており、その一方でベアリングアセンブリ340は固定アーム338の半径方向内側でコイルCの内面Iに係合する。固定アーム338は、支持のためにコイルCの上面Uに沿って伸張する細長い上部支持部348を具備する。固定アーム338は、吊り上げアセンブリ14への設置のために、クレビス(clevis)タイプの台350を具備する。
【0046】
図21,22に図示される実施の形態432は、図19,20の実施の形態332と多くの特徴を分け合う。この実施の形態においてしかし、固定アーム438はまたコイルCの内面Iに係合するように形成されており、ベアリングアセンブリ440はコイルCの外面Oに係合するように形成される。
【0047】
より浅い深さD2を有するコイルC2による使用のために、図23,24の実施の形態532は使用可能である。この実施の形態において固定アーム538及びベアリングアセンブリ540はまたフランジアーム534に設置される。第2の固定アーム552は、ベアリングアセンブリ540に対向するコイルC2の外面Oに係合するように配置される。この実施の形態においてベアリングアセンブリ540はまた、回転するベアリング要素542を具備する。固定アーム538は、コイルCの内面Iに係合しており、ベアリング要素542は固定アーム538に対向するコイルCの内面Iを支える。第2の固定アーム552は、ベアリング要素542に対向するコイルCの外面Oに係合する。
【0048】
別の代わりの固定アセンブリは、操作アセンブリ、吊り上げアセンブリ、及び輸送アセンブリと同様に、本開示及び添付図面を検討した後に、当業者により理解されるであろう。全てのその様な別の実施の形態は、本発明の範囲及び精神の範囲内にある。
【0049】
本開示において「1つ」という用語は単一及び複数の両者を含むと解釈されるべきである。逆に複数の項目に対する任意の説明は適切な場合には単一を含まなければならない。
【0050】
前述の事項から、多くの修正及び変化が本発明の新規な思想の精神及び範囲から逸脱しないで有効であり得ることが分かる。図示される特定の実施の形態に関して制限されることは意図されないこと、あるいは推定されるべきでないことが理解されるべきである。開示については、記載された請求項により、請求項の範囲内にあるような全ての修正がカバーされることが意図される。
【図面の簡単な説明】
【図1】図1は、本発明の基本を具体化するコイルハンドリング装置の側面図であり、該装置は4つのコイルのスタックを図示しており、それにコイルを係合又は固定する前の状態が示される。
【図2】図2は、図1のコイルハンドリング装置の頂面図である。
【図3】図3は、コイル操作アセンブリの立体図であり、該操作アセンブリは図1と2で図示されるものから逆に立体的に示される。その構成要素は以下に図4−7で示される。
【図4】図4は、図3の操作アセンブリのキャリッジ部の側面図である。
【図5】図5は、図4のキャリッジの頂面図である。
【図6】図6は、図3の操作アセンブリのスラストレバーの側面図である。
【図7】図7は、図6のスラストレバーの頂面図である。
【図8】図8は、角度付きのキャスタサポートを備える輸送アセンブリを有するコイルハンドリング装置の実施の形態の頂面図であり、該装置はそこにコイルの単一の層を有するパレットの角部をまたぐ状態で図示される。
【図9】図9は、図8のコイルハンドリング装置の頂面図であり、コイルの層当たりで4つのコイルを有するパレットの角部をまたぐ状態で図示される。
【図10】図10は、使用中の該装置の解説図である。
【図11】図11は、使用中の該装置の解説図である。
【図12】図12は、使用中の該装置の解説図である。
【図13】図13は、使用中の該装置の解説図である。
【図14】図14は、使用中の該装置の解説図である。
【図15】図15は、使用中の該装置の解説図である。
【図16】図16は、使用中の該装置の解説図である。
【図17】図17は、コイルハンドリング装置の固定アセンブリの別の実施の形態の解説図である。
【図18】図18は、コイルハンドリング装置の固定アセンブリの別の実施の形態の解説図である。
【図19】図19は、コイルハンドリング装置の固定アセンブリの別の実施の形態の解説図である。
【図20】図20は、コイルハンドリング装置の固定アセンブリの別の実施の形態の解説図である。
【図21】図21は、コイルハンドリング装置の固定アセンブリの別の実施の形態の解説図である。
【図22】図22は、コイルハンドリング装置の固定アセンブリの別の実施の形態の解説図である。
【図23】図23は、コイルハンドリング装置の固定アセンブリの別の実施の形態の解説図である。
【図24】図24は、コイルハンドリング装置の固定アセンブリの別の実施の形態の解説図である。
【符号の説明】
10…コイルハンドリング装置
12…操作アセンブリ
14…吊り上げアセンブリ
16…輸送アセンブリ
20…支持アーム
22…支持部材
24…旋回キャリッジ
26…横の支持部材
28…旋回板
32…固定アセンブリ
38…固定アーム
48…スラストレバー
50…ベアリングアーム
68…リフトキャリッジ
70…ブーム
76…ベース
78…キャスタ
88…リフトロック
Claims (9)
- 直径を形成する内面と深さを有するコイルに係合するためのコイル操作装置において、前記コイルが長手方向の軸を形成しており、
前記コイル操作装置は、前記長手方向の軸が垂直に向いた状態で前記コイルに係合し更に前記コイルの向きを新たに設定して前記長手方向の軸を水平に配置するように形成されており、
該操作装置は、
一対の間隔を有して離れる支持アームと、
前記支持アームにより支持されていてその間に配置される旋回キャリッジと、
を具備しており、
前記キャリッジは、前記コイルの前記深さに沿って前記コイルの内面に係合するための固定アームを具備しており、該キャリッジは更に、お互いに鈍角で配置されるレバーアームとベアリングアームを具備するスラストレバーを具備しており、
該スラストレバーは、前記固定アームから約100度で前記キャリッジに旋回可能に設置されており、更に前記固定アームとベアリングアームが直ちに前記コイルに挿入する第1の位置と、前記ベアリングアームが前記コイルの前記内面に向かって強制的に押されて前記固定アームと前記ベアリングアームとの間に前記コイルを固定する、第2の位置との間で旋回可能であり、
前記旋回するキャリッジは、コイルの長手方向の軸が垂直である第1の位置と、コイルの長手方向の軸が水平である第2の位置との間で旋回可能である、コイル操作装置。 - 前記キャリッジは、前記キャリッジを旋回するためにそれの端部において旋回部材を有する横の支持部材を具備しており、前記キャリッジは、前記横の支持部材に対して横に伸張する第1と第2のフランジアームを更に具備しており、そこでは
前記固定アームは前記第1のフランジアームに設置されており、更に前記スラストレバーは前記第2のフランジアームに設置される、
請求項1に記載のコイル操作装置。 - 前記第1のフランジアームから、前記固定アームに対向して、伸張する位置決め部材を具備しており、
前記ベアリングアームが前記コイルの内面に対して強制的に押されて前記コイルを前記固定アームと前記ベアリングアームとの間に固定する場合に、前記スラストレバーは、前記位置決め部材と協働して前記固定アーム及び前記ベアリングアームを固定する、
請求項2に記載のコイル操作装置。 - 前記第1のフランジアームから、前記固定アームに対向して、伸張する位置決め部材を具備しており、
前記スラストレバーは、前記ベアリングアームと固定アームを前記コイルに挿入するために前もって決められた位置において、前記位置決め部材と協働して前記固定アーム及び前記ベアリングアームを固定する、
請求項2に記載のコイル操作装置。 - 前記固定アームの端部から伸張するフック状の突起を具備しており、
前記フック状の突起は、前記コイルの底面及び前記コイル内面の継ぎ目において前記コイルに係合するように形成される、
請求項1に記載のコイル操作装置。 - 前記固定アームをそれに取り外し可能に設置するために、第1のフランジアームから伸張するスタッブを具備しており、
前記固定アームは、前記コイルの底面及び前記コイル内面の継ぎ目において前記コイルに係合するために、そこから伸張するフック状の突起を具備する、
請求項2に記載のコイル操作装置。 - 前記キャリッジは、一対の横の支持部材を具備しており、更に
ピボット部材は前記横の支持部材の端部に設置された板である
請求項2に記載のコイル操作装置。 - 前記ピボット板は、ピボット位置を形成しており、
前記ピボット位置は、前記横の支持部材の下に設置される、
請求項7に記載のコイル操作装置。 - 吊り上げアセンブリを具備しており、更に
前記間隔を有して離れる支持アームは前記吊り上げアセンブリに設置される、
請求項1に記載のコイル操作装置。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US09/866257 | 2001-05-25 | ||
| US09/866,257 US6499932B2 (en) | 2001-05-25 | 2001-05-25 | Coil handling device |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2002362835A JP2002362835A (ja) | 2002-12-18 |
| JP2002362835A5 JP2002362835A5 (ja) | 2005-11-04 |
| JP4128797B2 true JP4128797B2 (ja) | 2008-07-30 |
Family
ID=25347237
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002141440A Expired - Fee Related JP4128797B2 (ja) | 2001-05-25 | 2002-05-16 | コイルハンドリング装置 |
Country Status (7)
| Country | Link |
|---|---|
| US (2) | US6499932B2 (ja) |
| EP (1) | EP1260285A3 (ja) |
| JP (1) | JP4128797B2 (ja) |
| KR (1) | KR100801756B1 (ja) |
| AU (1) | AU757345B2 (ja) |
| BR (1) | BR0201408B1 (ja) |
| TW (1) | TW531518B (ja) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6499932B2 (en) * | 2001-05-25 | 2002-12-31 | Illinois Tool Works Inc. | Coil handling device |
| IE20020724A1 (en) * | 2002-09-06 | 2004-03-10 | Moffett Res & Dev Ltd | Improvements in and relating to fork lift trucks |
| US6840731B2 (en) * | 2002-12-10 | 2005-01-11 | Illinois Tool Works, Inc. | Coil handler device |
| US8480145B2 (en) * | 2011-10-10 | 2013-07-09 | Eastall Precision Engineering Pty Ltd. | Vertical bore coil lifting apparatus |
| CN103943355A (zh) * | 2014-05-13 | 2014-07-23 | 保定天威保变电气股份有限公司 | 变压器线圈立绕轴向压紧方法及工具 |
| US20170274435A1 (en) * | 2014-09-02 | 2017-09-28 | Afl Telecommunications Llc | Reel rotation device for use with fiber optic cable storage reel |
| CN104442962B (zh) * | 2014-12-31 | 2017-05-10 | 江苏兴达钢帘线股份有限公司 | 工字轮翻转小推车 |
| CN105290304B (zh) * | 2015-11-11 | 2017-12-22 | 无锡市福克斯煤矿机械制造有限公司 | 编制混合链的后摆动限位装置 |
| IT202100018710A1 (it) * | 2021-07-15 | 2023-01-15 | Stefano Petri | Manipolatore per bobine di materiale nastriforme, in particolare per il caricamento di bobine su uno svolgitore |
Family Cites Families (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2624609A (en) * | 1947-08-04 | 1953-01-06 | Houston Oil Field Mat Co Inc | Locking lift plug |
| US2706658A (en) * | 1950-08-16 | 1955-04-19 | Denzil W Jewell | Device for handling tubular articles |
| US2817450A (en) * | 1954-08-30 | 1957-12-24 | Yale & Towne Mfg Co | Load rotating and positioning attachment for industrial truck |
| US2823948A (en) * | 1955-12-21 | 1958-02-18 | Kenneth W Horton | Grab for lifting hollow objects |
| US2951725A (en) * | 1957-07-22 | 1960-09-06 | Worcester Automatic Machine Co | Material handling apparatus |
| US3044647A (en) * | 1960-04-14 | 1962-07-17 | Grand Specialties Company | Manipulator apparatus |
| US3409156A (en) * | 1966-10-05 | 1968-11-05 | Mills Sam | Coil lifter |
| US4029230A (en) * | 1976-05-21 | 1977-06-14 | Container Corporation Of America | Drum handling attachment |
| US4121868A (en) * | 1977-03-14 | 1978-10-24 | Pierce Ray E | Cam actuated pivotal jaw gripping apparatus |
| FR2383878A1 (fr) * | 1977-03-15 | 1978-10-13 | Salev | Equipement de chariot elevateur pour manutention de bobines de cable |
| US4531771A (en) * | 1982-03-22 | 1985-07-30 | William M. Kinney | Rug puller |
| US4460210A (en) * | 1982-09-07 | 1984-07-17 | Miechur Joseph W | Lifting device |
| US4515522A (en) * | 1983-01-19 | 1985-05-07 | Sonerud John Teodor | Pipelaying appliance |
| US4557515A (en) * | 1984-11-08 | 1985-12-10 | Woodlawn Iron Works, Inc. | Coil handling device |
| GB9123281D0 (en) * | 1991-11-02 | 1991-12-18 | Mcquaid Paul | Lifting attachment |
| FR2728885A1 (fr) * | 1994-12-30 | 1996-07-05 | Lebre Charles J P | Dispositif pour prendre des futs ou bobines en position verticale ou horizontale, les lever et leur imposer un mouvement de bascule sur 90° |
| US5513944A (en) * | 1995-01-09 | 1996-05-07 | N.R.S. Systems, Inc. | Roll handling apparatus for fork lift trucks |
| US5642979A (en) * | 1995-01-09 | 1997-07-01 | N.R.S. Systems, Inc. | Roll handling apparatus for fork lift trucks |
| US5934865A (en) * | 1997-11-25 | 1999-08-10 | Trace Digital Llc | Disk gripper |
| DE19806432A1 (de) * | 1998-02-17 | 1999-08-19 | Focke & Co | Vorrichtung zum Handhaben von Bobinen |
| FR2784088B1 (fr) * | 1998-10-05 | 2000-12-15 | Rotobloc | Dispositif de manutention de pieces, notamment de bobines de tole et appareil equipe dudit dispositif |
| US6648580B2 (en) * | 2000-11-03 | 2003-11-18 | R On I, Llc | Roll-handling attachment for lifter |
| US6499932B2 (en) * | 2001-05-25 | 2002-12-31 | Illinois Tool Works Inc. | Coil handling device |
-
2001
- 2001-05-25 US US09/866,257 patent/US6499932B2/en not_active Expired - Fee Related
-
2002
- 2002-04-11 KR KR1020020019735A patent/KR100801756B1/ko not_active IP Right Cessation
- 2002-04-24 BR BRPI0201408-4A patent/BR0201408B1/pt not_active IP Right Cessation
- 2002-05-10 AU AU40595/02A patent/AU757345B2/en not_active Ceased
- 2002-05-13 EP EP02253312A patent/EP1260285A3/en not_active Withdrawn
- 2002-05-16 JP JP2002141440A patent/JP4128797B2/ja not_active Expired - Fee Related
- 2002-05-20 TW TW091110571A patent/TW531518B/zh not_active IP Right Cessation
- 2002-08-27 US US10/228,643 patent/US6817826B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| AU4059502A (en) | 2002-11-28 |
| TW531518B (en) | 2003-05-11 |
| KR20020090853A (ko) | 2002-12-05 |
| BR0201408B1 (pt) | 2012-01-10 |
| EP1260285A2 (en) | 2002-11-27 |
| BR0201408A (pt) | 2003-02-11 |
| AU757345B2 (en) | 2003-02-20 |
| KR100801756B1 (ko) | 2008-02-11 |
| EP1260285A3 (en) | 2004-01-07 |
| US6817826B2 (en) | 2004-11-16 |
| US20020176770A1 (en) | 2002-11-28 |
| JP2002362835A (ja) | 2002-12-18 |
| US20020197143A1 (en) | 2002-12-26 |
| US6499932B2 (en) | 2002-12-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7150459B2 (en) | Reel support and dispensing cart | |
| JP4128797B2 (ja) | コイルハンドリング装置 | |
| US4036383A (en) | Fork lift truck tote box dumper | |
| WO1987006895A1 (en) | Two-stage type device of loading automobile on container and operating method thereof | |
| US5690240A (en) | Dolly with detachable boom | |
| US7490882B2 (en) | Clamping device for lifting slab, panel or sheet material | |
| US3491967A (en) | Mobile apparatus for dispensing coiled cable and the like | |
| US6840731B2 (en) | Coil handler device | |
| CA1088487A (en) | Wire carrying spool and apparatus for support and lifting thereof | |
| AU2022316597A1 (en) | Flexible element dispenser | |
| US7185773B2 (en) | Apparatus and method for storing and shipping products | |
| US20240010480A1 (en) | Fork assembly for forklifts | |
| US20020187033A1 (en) | Drum handling device | |
| KR101058389B1 (ko) | 스크랩 받이통 및 그를 사용한 스크랩 처리 시스템 | |
| JP3523916B2 (ja) | コイル状圧延重量物の起伏装置 | |
| KR20060021961A (ko) | 농업용 컨테이너박스 운반장치 | |
| WO2003057613A1 (en) | Clamping device for lifting slab, panel, or sheet material | |
| WO2009074855A1 (en) | Orientator device and method for orienting a stack of coils | |
| JP3815787B2 (ja) | 苗コンテナの積上装置 | |
| WO2016083723A1 (fr) | Dispositif automatise de manutention et de transport de tôles entre l'intérieur et l'extérieur d'un réservoir | |
| JP3025969U (ja) | 農用高所作業車 | |
| CN117088137A (zh) | 一种倾斜分垛式搬运机 | |
| EP2768743B1 (en) | Weight relief transportation apparatus for construction equipment | |
| CN113859338A (zh) | 一种材料运输车 | |
| JPH0672000B2 (ja) | フォークリフト型荷役装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050516 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050914 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20070618 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070626 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20070925 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20070928 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20071112 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20080415 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080515 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110523 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110523 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120523 Year of fee payment: 4 |
|
| LAPS | Cancellation because of no payment of annual fees |