JP4095932B2 - 屈折率測定装置及び屈折率測定方法 - Google Patents
屈折率測定装置及び屈折率測定方法 Download PDFInfo
- Publication number
- JP4095932B2 JP4095932B2 JP2003163983A JP2003163983A JP4095932B2 JP 4095932 B2 JP4095932 B2 JP 4095932B2 JP 2003163983 A JP2003163983 A JP 2003163983A JP 2003163983 A JP2003163983 A JP 2003163983A JP 4095932 B2 JP4095932 B2 JP 4095932B2
- Authority
- JP
- Japan
- Prior art keywords
- refractive index
- axis
- sample
- measurement
- light
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000000034 method Methods 0.000 title claims description 24
- 238000005259 measurement Methods 0.000 claims description 63
- 230000010287 polarization Effects 0.000 claims description 25
- 238000001514 detection method Methods 0.000 claims description 17
- 238000000691 measurement method Methods 0.000 claims description 7
- 230000001678 irradiating effect Effects 0.000 claims description 3
- 229940125730 polarisation modulator Drugs 0.000 claims 1
- 239000011159 matrix material Substances 0.000 description 15
- 238000007796 conventional method Methods 0.000 description 11
- 239000000463 material Substances 0.000 description 9
- 238000012545 processing Methods 0.000 description 7
- 238000010586 diagram Methods 0.000 description 6
- 230000004323 axial length Effects 0.000 description 4
- 238000006243 chemical reaction Methods 0.000 description 4
- 230000006870 function Effects 0.000 description 4
- 230000007246 mechanism Effects 0.000 description 4
- 230000008859 change Effects 0.000 description 3
- 230000004907 flux Effects 0.000 description 3
- 238000003908 quality control method Methods 0.000 description 3
- 230000008901 benefit Effects 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 239000010409 thin film Substances 0.000 description 2
- 230000003111 delayed effect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000010408 film Substances 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 239000012770 industrial material Substances 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
Images




Landscapes
- Investigating Or Analysing Materials By Optical Means (AREA)
Description
【発明の属する技術分野】
本発明は屈折率測定装置及び屈折率測定方法、特に試料の屈折率を3次元的に測定する機構及び方法、の改良に関する。
【0002】
【従来の技術】
光透過性の素材は、工業材料、民生品、その他に数多く利用されている。その中で、特に光磁気材料やディスプレイ関係に利用されるケースでは、光の偏光という特性が利用されていることもあって、素材の複屈折を品質特性として計測・管理することが求められるようになってきている。この場合でも、光が単一方向のみの平行光束として、あるいはほとんどそれに近い状態で透過する状態で利用される場合には、その素材の屈折率あるいは複屈折性はその光の光束に垂直な面内でのみ計測・管理されればよかった(例えば、特許文献1参照)。しかしながら単一方向だけではなく、いろいろな方向から光が透過する状態で使われる場合には、それぞれの方向の光に対する複屈折性を計測・管理することが必要となり、そのためには、素材の屈折率を3次元的に計測することが必要となる。
素材の屈折率を3次元的に求める場合には、素材を直交する3つの方向で切り出して、平面あるいは板状のテスト試料を作成し、それぞれの面内での複屈折あるいは屈折率を測定し、それぞれの測定値を再構成して3次元の屈折率とするのが原理に基づく方法である。
【0003】
【特許文献1】
特願2002−351400号
【0004】
【発明が解決しようとする課題】
しかし、素材を3つの方向で切り出すことは、相当に手間を要する。かつ現実に使われている素材は、既に板状、シート状に成型されており、その状態で機能を付与されているものがほとんどで、これらについて3方向に沿って切り出した板状試料を用意することは不可能ないし極めて困難である。
【0005】
そのため、測定装置として、例えば試料を、測定光束を回転軸として回転させる機構と、試料をあおるための測定光束に垂直なもう一つの回転軸の少なくとも2つの試料回転軸と、を備えたものを用いて屈折率を3次元的に求めることが行なわれてきている。この方法は、試料への測定光束の入射方向を連続的に変化させて、そのときの測定光束に垂直な平面内での進相軸、遅相軸の変化を調べ、屈折率の主軸を求めるというものである。この方法は、少なくとも一つの屈折率の主軸方向が分かっている場合にだけ、適用可能なことが分かっている。つまり、屈折率の主軸の方向に関してある程度の情報が、あらかじめ分かっている試料でなければ適用できない。
【0006】
ただし、現実的にはその試料の幾何学的な特徴等から屈折率の主軸の方向に関して何らかの仮定を設けられる場合がある。例えば「等方的に調整された薄膜試料の場合、膜の面内では屈折率に異方性があるとする特別な理由がない。膜の厚さ方向では面方向と事情が異なるので、屈折率が異なっている可能性がある。」と考えることはそれほど無理な仮定ではない。そしてこのような試料がそれなりに多く存在し、そのような試料についての屈折率の測定・品質管理に従来法が有効に適用されていたといえる。しかし、素材・機能部品に期待される機能・性能が高度となるにつれ、それらの屈折率の測定・品質管理もより高精度であることが要求されるようになってきており、「先述の仮定も、厳密には成り立っていないのではないか」という前提に立って、測定を行うことが必要となってきている。このような要求に応えるには、屈折率の主軸の方向について特別な前提がなくても一般的に解析できる方法が必要である。
【0007】
また、従来法が適用できた「前提が成り立つ試料」についても、装置及び測定の簡略化と全測定時間の短縮を図ることは大いに価値あることである。
本発明は上記課題に鑑みなされたものであり、その目的は一般的な試料に対して、3次元的な屈折率の測定を可能とする屈折率測定装置及び方法を提供することにある。
【0008】
【課題を解決するための手段】
上記目的を達成するため、本発明の屈折率測定装置は、光照射手段から照射された光を直線偏光とする偏光子と、該直線偏光の偏光状態を周期的に変調させるための偏光変調手段と、測定光束に対する試料のあおり角を制御するため、前記偏光変調手段からの測定光束に垂直な回転軸で回転可能に構成された試料ステージと、試料からの透過光を検光子を介して観測する光検出手段と、を備えている。そして、光検出手段の検出信号から測定光束に垂直な平面内での試料のリタデーションと、遅相軸または進相軸の方位角とを算出する複屈折演算手段、複数のあおり角で測定された前記リタデーション及び軸方位から試料の屈折率テンソルの各成分を算出するテンソル成分演算手段、前記屈折率テンソルの固有値、固有ベクトルを算出する固有値演算手段、を備え、固有値から試料の屈折率の主値を、固有ベクトルから試料の屈折率の主軸を求めることを特徴とする。
上記の屈折率測定装置において、前記検光子は測定光束を回転軸として偏光軸方位が回転可能に構成され、該検光子の前記偏光子に対する偏光軸の方位が0°のときの検出信号と、偏光軸の方位が45°のときの検出信号とから、測定光束に垂直な平面内での試料のリタデーション及び方位角を算出することが好適である。
【0009】
また、本発明の屈折率測定方法は、偏光状態を変調させた光を試料に照射し、該試料を透過した光を検出することで、測定光束に垂直な平面での試料の複屈折を測定し、該試料の3次元的な屈折率の主値及び主軸の軸方位を検出する屈折率測定方法であって、所定の3つのあおり角で、測定光束に垂直な平面内での試料のリタデーション及び、遅相軸又は進相軸の方位角を測定する工程と、該3つのあおり角での前記リタデーション及び軸方位から屈折率テンソルの各成分を算出する工程と、前記屈折率テンソルの固有値、固有ベクトルを求め、その固有値から試料の屈折率の主値、固有ベクトルから屈折率の主値の軸方位を求める工程と、
を含むことを特徴とする。
上記の屈折率測定方法において、前記所定のあおり角が、0°、θ°、-θ°(0°<θ<90°)の3つであることが好適である。
【0010】
【発明の実施の形態】
光透過性媒質の屈折率は、互いに直交する固有の屈折率で完全に定まり、その様子は図4(a)のような屈折率楕円体によって視覚的に記述される。図4(a)では上記3つの固有の屈折率n1、n2、n3は、それぞれ楕円体の主軸の軸長として表されている。これらを試料の屈折率の主値と呼ぶ。試料の3次元的な屈折率の情報は、これら屈折率の主値と、主軸の方向を知ることで完全に分かる。
屈折率楕円体による記述では、その媒質中をある方向から進む光に対して、その光を構成する各偏光の屈折率がその光の進行方向に垂直な平面と楕円体の交線となる楕円から得られる。図4(b)では、Z軸方向へ光を入射した場合を示している。この場合測定光に垂直な平面はXY平面となっている。この楕円の長軸、短軸の方向に偏光した光に対して、この媒質はそれぞれの軸長に相当する屈折率を示すことになる。長い方の軸は、そちらに偏光した光について屈折率が大きく、従って、媒質中を透過するするときに位相が遅れることから遅相軸、反対に短い方は位相が進むことから進相軸と呼ばれる。またこれらの軸長の違いが複屈折の原因となり、一般的に複屈折測定は、これらの軸長の差(リターデーション)や、遅相軸または進相軸の方位角を測定するためのものである。つまり、一般の複屈折測定では測定光束に垂直な平面内での情報のみが得られることになる。
屈折率楕円体の一般形は対称行列(テンソル)を用いた以下のような2次形式で表される。
【0011】
【数1】

【0012】
本発明は、この屈折率テンソルの各成分を求め、該テンソルの固有値、固有ベクトルを算出することで、屈折率の主値、屈折率の主軸の軸方位を求めることを特徴とする。本発明の測定装置は、試料をX軸を回転軸として回転させ測定光束に対してあおった状態でも測定できるようにする機構を備えている(ただし、Z軸を測定光束の方向とし、XY面を試料がセットされる面とした)。また、試料を透過した測定光を検知・データ処理して複屈折(リタデーション)のみならず、その遅相軸または進相軸の方位も併せて求めることができる機構も備える。以下にその本発明の屈折率測定装置の具体的な構成を説明する。
【0013】
図1の屈折率測定装置10は、特定の波長域の光を照射する光照射手段12(光源38、分光器40)と、光照射手段12からの光を直線偏光にするための偏光子14と、光の偏光状態を周期的に変調するための偏光変調手段(光弾性変調子(PEM16))と、試料18のあおり角を制御可能な試料ステージ20と、検光子22を介して光を検出する光検出手段26(光電子増倍管(PMT))と、を備えている。
試料ステージ20は、測定光束に垂直な軸を回転軸として、回転可能に構成される。この試料ステージ20によって、測定光束に対して任意のあおり角で試料18をあおった状態で測定を行なうことができる。
【0014】
また、検光子22は検光子回転手段24によって測定光束を軸として回転可能なように構成されている。試料ステージ20及び検光子回転手段24は、手動によって回転可能なように構成してもよいし、またステッピングモータ等を用い、コンピュータ等で制御できるように構成してもよい。
光検出手段26からの信号は、ロックインアンプ等を介して、所定の周波数成分が取りだされ、この信号成分はパーソナルコンピュータ等で構成されるデータ処理系36に送られる。データ処理系36は、光検出信号から測定光束に垂直な平面内でのリタデーション及び遅相軸の方位角を演算するための複屈折演算手段28と、前記複屈折演算手段28により求められた3つの異なるあおり角でのリタデーション及び遅相軸の方位角の情報から屈折率テンソルの各成分を算出するテンソル成分演算手段30と、該テンソルの固有値及び固有ベクトルを求める固有値演算手段32と、を含む。つまり、データ処理系36で、3つのあおり角での測定データから試料の屈折率の主値、及び屈折率の主軸の方向を算出する。
【0015】
装置の各構成の働きは概略以下のとおりである。
光照射手段12は、波長走査を行なうため、光源38と、分光器40等によって構成され、光源38から出た光が分光器40によって特定波長の単色光とされる。光照射手段12からの光は、偏光子14を透過して直線偏光となり、該直線偏光はPEM16によって偏光状態を所定変調周波数で変調された光となる。このPEM16はPEMコントローラー(図示せず)に接続され、PEMコントローラーによってPEM16に周波数fの交流電圧が加えられる。この結果、PEM16を透過する光は、PEM16の進相軸方向の振動成分と、遅相軸方向の振動成分との間に周波数fで変動する位相差δを生じさせる。この結果、PEM16を透過した光は偏光状態が変調周波数fで変調された光となる。
【0016】
このように変調された測定光は試料18に照射され、その試料からの透過光を検光子22に透過させる。検光子22を透過した光は光電子増倍管等で構成される光検出手段26により検出される。この検出信号はロックインアンプへと送られ、参照信号をもとに検出信号の周波数f及び2fの成分を抽出し、データ処理系36へと送られ、記憶手段34に記憶される。複屈折演算手段28では、上記の検出信号から、測定光束に垂直な平面内での試料のリタデーション、及び遅相軸または進相軸の方位角を算出する。
【0017】
以上の複屈折測定を複数の異なるあおり角(例えば、0°、θ°、−θ°(0°<θ<90°)の3つ)で行ない、それぞれのあおり角での試料の複屈折の情報(リタデーション及び、進相軸または遅相軸の方位角)は、あおり角の情報と組にして記憶手段34に記憶される。テンソル成分演算手段30では、上記3つのあおり角での複屈折の情報を元にして、屈折率楕円体を表す行列の各成分を算出する。このようにして得られた行列の固有値、及び固有ベクトルを固有値演算手段32によって求めることで、試料の屈折率の主値、及び屈折率の主軸の軸方位が求められる。
【0018】
次に測定データ処理の詳細を、測定の手順に従って説明する。本発明の屈折率測定方法は、3つのあおり角での試料の複屈折測定を行う工程(A)と、3つのあおり角での複屈折から、屈折率テンソルの各成分を求める工程(B)と、該テンソルから屈折率の主値、及び屈折率の主軸を求める工程(C)と、に分けられる。ここでは、試料のあおり角を0°、θ°、−θ°の3つで測定した場合を想定して説明を行なう。
【0019】
まず工程(A)について説明する。図2の(a)、(b)、(c)の左図は、3つのあおり角で測定光束に対してあおった試料の状態を示し、図2の(a)、(b)、(c)の右図はそれぞれのあおり角の場合での屈折率楕円体の断面である楕円を示している。ここでは測定光束の進行方向をZ軸、試料ステージの回転軸をX軸、これらに直交する軸をY軸とした。図2ではX軸は紙面に垂直な方向を向いている。あおり角は測定光束の方向に試料が垂直に設置されたとき(図2(a)の場合)を0°とし、図中左回りをプラス方向、右回りをマイナス方向とした。
図2の右図に描かれた楕円は、長軸の長さ、短軸の長さ、長軸の方位角ψで特徴付けられる。ここで、長軸は遅相軸、短軸は進相軸を示しており、それそれの長さはその方向の偏光した光の屈折率を示している。そこで、あおり角が0°、θ°、―θ°で測定したそれぞれの場合のリタデーション及び遅相軸の軸方位角を以下に示す手順で求めればよい。
【0020】
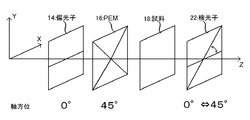
本発明の屈折率測定装置を用いた場合のリタデーションの測定は次のようになる(詳しくは、特許文献1を参照)。図3は偏光子14、PEM16、検光子22の軸方位の関係を示したものである。ここで、Z軸方向を測定光束の進行方向とし、また偏光子14の偏光軸方位をX軸と合わせ、方位角を0°としてこれを基準とする。PEM16の遅相軸及び進相軸方位は、通常行なわれているように、偏光子の偏光軸に対して45°の角度で設置する。また、検光子はZ軸を回転軸とした回転可能になっており、その偏光軸方位を変えられるようになっている。
【0021】
まず、試料を所定のあおり角で固定し、測定光束を照射してその透過光を測定する。検光子の偏光軸方位を0°で測定したときの検知信号のf成分をI0とし、検光子の軸方位を45°にして同様に測定をしたときの検知信号のf成分をI45とする。ここで、fは偏光変調された光の変調周波数である。I0、I45は次の式で表される。
I0=sin2ψsinΔ
I45=cos2ψsinΔ
【0022】
Δは進相軸方位の偏光成分と遅相軸方位の偏光成分との試料出射時の位相差、ψは測定光束に対して垂直な平面での遅相軸の方位角である。(Δ・λ)/(2π)測定光の波長)がリタデーションと呼ばれる量である。
ここでI0とI45の比をとると、
I0/I45=tan2ψ
となる。この式から、遅相軸の軸方位ψが求められる。また、軸方位ψが求められたので、この式から位相差Δが求まる。進相軸と遅相軸の屈折率の差ΔNは、
ΔN=(Δ・λ)/(2πD)
で与えられる。ここでDは光が試料を通り抜けた長さである。あおり角が0°のときは単に試料の厚さであり、あおり角が0°以外のときは光の入射角を考慮して求めればよい。
【0023】
以上のリタデーション及び遅相軸の軸方位の測定は、検光子を回転して2通りの軸方位で測定した結果から得る方式を説明した。この他にも、試料を測定光束を回転軸として回転可能なように構成し、試料を回転させたときの検出信号の変化からリタデーション及び軸方位を検出する方式であってもよい。しかしながら、ここで説明した本発明の方式では、試料ステージの回転軸は測定光束に垂直な唯一つで済むため、装置構成が簡単になるという利点がある。
【0024】
次に、上記の測定結果から屈折率楕円体を表す行列成分を求める工程(B)について説明する。
あおり角0°で測定すると、図2(a)右図で示す楕円に対応したリターデーション(Δ0・λ)/(2π)と軸方位ψ0が求まる。軸方位ψ0は楕円の長軸(遅相軸)とX軸との間の角度である。リターデーションからは楕円の長軸と短軸の差、すなわち屈折率の差は次の式で算出できる。
ΔN=(Δ0・λ)/(2πd) (dは試料の厚さ)
【0025】
ここから、屈折率楕円体のテンソル成分を次の手順で求める。
(1)大きい方の屈折率N0 1を与える。
(2)もう一方の屈折率N0 2をN0 2=N0 1−ΔN0によって求める。
(3)行列要素n0 11、n0 12、n0 12を次の式により求める。
【数2】
この中の(1)で、一つの屈折率を「測定に基づかずに」与えているが、元来複屈折測定は屈折率の絶対値ではなく、屈折率の差をリターデーションの形で求めるものであり、どこかの段階で基準となる値を与えることは必要不可欠である。そこで、最初の段階で、試料媒体として適切と思われる値をこのように与える。以下では、この値を基準に最終結果まで算出される。また、もし問題があるようなら、まず暫定的に概略値を用いて一通りの計算を行い、そこで得られた屈折率の値を最初に与える屈折率の値として再度計算を行なう。これが自己無撞着になるまで繰り返せばよい。ただし、実際にはこのような必要性は低いと思われる。 (2)では測定した位相差ΔN0をもとに、進相軸の屈折率を求めている。さらに(3)では、求められた遅相軸方向の屈折率N0 1、進相軸方向の屈折率N0 2、遅相軸の方位角ψ0をもとにして、テンソルの回転に対する変換則を用いて、屈折率テンソルの行列要素を求めている。
【0027】
次にX軸を回転軸としてθ°あおって測定すると、図2(b)右図に示す楕円に相当するリターデーション(Δ+・λ)/(2π)と軸方位ψ+が求まる。これらの値から行列要素への計算は、次の手順による。
(1)sinθ’=(sinθ)/N0 1、ただしθ’は試料媒体の中のあおり角
(2)cos2θ’=1−sin2θ’
(3)実効光路長D+=d/cosθ’ (dは試料の厚さ)
(4)ΔN+=(Δ+・λ)/(2πD+)
(5)N+ 1は実は未知であるが、いまここではわかっているものとする。
(6)N+ 2=N+ 1−ΔN+
(7)行列要素を次の式により求める。
【数3】
試料の表面に垂直に光を入射した場合光はそのまままっすぐ進むが、試料をあおって試料表面に斜めに入射した場合、その界面で屈折し、あおり角とは違った角度で進行する。そのため、(1)においては、試料中を進む光の角度θ’を上記で与えた屈折率N0 1により算出している。また(2)、(3)では、試料中を光が通る光路長をこの角度θ’から算出している。(4)〜(7)では、あおり角が0°のときと同様にして、屈折率テンソルの成分を求めている。
逆に−θ°あおって測定すると、図2(c)に示すようになり、図に示す楕円に相当するリターデーション(Δ-・λ)/(2π)と軸方位ψ-が求まる。これらの値から、上と同じ手順により、次のように行列要素が求まる。
【数4】
これまでN+ 1、N- 1が既知として扱ってきたが、実際は未知である。これをX軸を回転軸とした変換(試料をあおることによる変換)に対してテンソルの(1,1)要素は不変であることを利用して解決する。
まず、試料のあおりに対してテンソルの(1,1)成分が不変であることから、
n0 11=n+ 11=n- 11
となる。ここで、n+ 11を屈折率N+ 1を用いて表すと、
【数5】
【数6】
【0030】
以上により、n0 11、n0 22、n0 12の3個のあおり角0°のときの行列要素が求まったことになる。また、残りのあおり角0°のときの行列要素n0 33、n0 23、n0 13は、あおり角θ°、−θ°のときの行列要素n+ 22、n+ 12、n- 22、n- 12を用い、テンソルの変換則から得られる次の式によって求められる。
【数7】
【数8】
【0031】
工程(C)では、上記のテンソルの固有値と固有ベクトルを求める。これは、公知の方法で求めることができ、3つの屈折率の主値はそれぞれ3つの固有値の平方根の逆数、それらに対応する屈折率の主軸の方向はこの固有ベクトルとして求まる。
このように、本発明では試料を3つのあおり角で複屈折を測定することで試料の3次元的な屈折率の情報を得ることができるので、どのような試料に対しても適用可能な測定となっている。
【0032】
最後に従来法の欠点を詳細に説明し、本発明との比較を行ない本発明の利点を説明する。従来法の測定方法は以下のようなものである。まず、試料媒質が図4(a)に示したような屈折率楕円体で規定される屈折率を有しているとする。そして、XY平面に板状試料を置き、それに直交するZ軸に沿って平行光束を透過させ、試料の複屈折を測定するような測定系を定める。
この楕円体がXY面と交わる様子を示したのが図4(b)である。その交線となる楕円と楕円の長軸(遅相軸)、短軸(進相軸)が描かれている。
【0033】
まず、楕円体の主軸がたまたまXY平面内にあった場合を考える。このとき、この主軸は、XY平面と楕円体の交線である楕円の長軸(遅相軸)または短軸(進相軸)とに一致する。ここでは、遅相軸に主軸の一つが一致していたと仮定する。そこで、複屈折を観測しながら試料をZ軸を中心としてXY面上で回転し、遅相軸をX軸に一致させると、そのときの楕円面は図5(a)のようになる。次に試料をあおりながら、複屈折を観測する。試料を様々なあおり角で測定したときの楕円面をまとめて描いたものが図5(b)である。図5(b)を見ると分かるように、軸立てした長軸(遅相軸)の大きさは変化しないが、短軸(進相軸)の大きさは変化して観測される。このとき遅相軸(変化せず一定の軸)が元々の屈折率の主軸の一つに一致していることが分かる。あおり角を例えば−45°から45°のように90°を超える範囲で変えながら複屈折を観測すると、図5(b)のように遅相軸は一定で進相軸があおり角に従って変化して観測され、この測定範囲の中で進相軸(大きさが変化している方の軸)の大きさに極大ないし極小値が必ず一つ観測される。このとき、軸が2つ目の主軸と一致していることになる。最後の3つめの主軸は、進相軸の大きさの角度依存性から算出する。
しかしながら、逆に進相軸をX軸に一致させるように軸立てした場合には、図5(c)に示すように進相軸はもちろん遅相軸の方もあおり角とともに変化し、図5(b)のように一定になる軸がない。
【0034】
この例は遅相軸に軸立てしたときにうまく測定できた例であるが、いつも遅相軸に軸立てすれば成功するというものではない。遅相軸、進相軸のどちらに軸立てしたときにうまくいくかは3つの主軸の大小関係に依存するので、どちらで成功するかはやってみるしかない。
さらに上記の場合は、3つ主軸の少なくとも一つがXY面上にあるという特殊な場合を考えていたが、どの主軸もXY面上にない一般の場合には、この従来法ではうまくいかない。
【0035】
一般のケースでは、まずある一つの方向から複屈折を観測すると図4(b)に示す楕円に相当するものが観測される。これを定法に従って遅相軸に軸立てし、様々な角度で試料をあおって観測しても、図5(c)と同様になり、あおり角によらず一定となる軸は現れない。また、進相軸に軸立てしても状況は変わらず同じく図(c)と同様になり、やはりあおり角によらず一定になる軸は現れない。結局従来法では主軸を求めることができないという結論になる。
【0036】
これまで述べたことにより、従来法が有効に機能するのは、試料媒質の屈折率の主軸のすくなくとも一つが面内にある場合に限られることになる。しかし「一つだけが面内にある」というのは偶然の所産でしかなく、その偶然が起こっていることが偶然ゆえ保証できない以上、「軸の方向について限定できる特別の根拠がない」場合には適用不能である。
【0037】
ただし、例えば等方的に調整された薄膜試料のように、現実的には主軸2つが面内に存在し、もう一つはその面と垂直になっているとおおむね限定できる場合がないわけではない。つまり、試料の他の性質から、屈折率の主軸方向に関してある程度の仮定を設けられる場合もある。そしてこのような試料がそれなりに多く存在し、そのような試料については、屈折率の測定・品質管理に従来法が有効に適用されていた。
【0038】
このように、従来法では屈折率の主軸方向がある程度予測できる試料に対してしかうまく働かなかった。それに対して本発明の方法では、屈折率の主軸方向を全く予測できない試料に対しても有効に働く。つまり、従来法では、試料の主軸を直接求めようとしたのに対し、本発明では屈折率テンソルの成分を求め、その固有ベクトルとし主軸の方位を求めたため、一般の試料にも適用可能な測定方法となったのである。
【0039】
【発明の効果】
本発明の屈折率測定装置及び屈折率測定方法によれば、試料の3次元的な屈折率の解析を一般的な試料に対しても行なうことが可能となる。
【図面の簡単な説明】
【図1】本発明の屈折率測定装置の概略構成図。
【図2】本発明の屈折率測定方法の説明図。
【図3】屈折率測定装置の偏光子、PEM、検光子の軸方位の説明図。
【図4】屈折率楕円体の説明図。
【図5】従来法の説明図。
【符号の説明】
10 屈折率測定装置
12 光照射手段
14 偏光子
16 PEM
18 試料
20 試料ステージ
22 検光子
24 検光子回転手段
26 光検出手段
28 複屈折演算手段
30 テンソル成分演算手段
32 固有値演算手段
34 記憶手段
36 データ処理系
38 光源
40 分光器
Claims (4)
- 光照射手段から照射された光を直線偏光とする偏光子と、
該直線偏光の偏光状態を周期的に変調させるための偏光変調手段と、
測定光束に対する試料のあおり角を制御するため、前記偏光変調手段からの測定光束に垂直な回転軸で回転可能に構成された試料ステージと、
試料からの透過光を検光子を介して観測する光検出手段と、を備えた屈折率測定装置であって、
光検出手段の検出信号から、測定光束に垂直な平面内での試料のリタデーションと、遅相軸または進相軸の方位角と、を算出する複屈折演算手段、
複数のあおり角で測定された前記リタデーション及び方位角から試料の屈折率テンソルの各成分を算出するテンソル成分演算手段、
前記屈折率テンソルの固有値、固有ベクトルを算出する固有値演算手段、を備え、固有値から試料の屈折率の主値を、固有ベクトルから試料の屈折率の主軸を求めることを特徴とする屈折率測定装置。 - 請求項1の屈折率測定装置において、
前記検光子は測定光束を回転軸として偏光軸方位が回転可能に構成され、該検光子の前記偏光子に対する偏光軸の方位が0°のときの検出信号と、偏光軸の方位が45°のときの検出信号とから、測定光束に垂直な平面内での試料のリタデーション及び方位角を算出することを特徴とする屈折率測定装置。 - 偏光状態を変調させた光を試料に照射し、該試料を透過した光を検出することで、測定光束に垂直な平面での試料の複屈折を測定し、該試料の3次元的な屈折率の主値及び主軸の軸方位を検出する屈折率測定方法であって、
所定の3つのあおり角で、測定光束に垂直な平面内での試料のリタデーション及び、遅相軸又は進相軸の方位角を測定する工程と、
該3つのあおり角での前記リタデーション及び軸方位から屈折率テンソルの各成分を算出する工程と、
前記屈折率テンソルの固有値、固有ベクトルを求め、その固有値から試料の屈折率の主値、固有ベクトルから屈折率の主値の軸方位を求める工程と、
を含むことを特徴とする屈折率測定方法。 - 請求項3の屈折率測定方法において、
前記所定のあおり角が、0°、θ°、-θ°(0°<θ<90°)の3つであることを特徴とする屈折率測定方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003163983A JP4095932B2 (ja) | 2003-06-09 | 2003-06-09 | 屈折率測定装置及び屈折率測定方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003163983A JP4095932B2 (ja) | 2003-06-09 | 2003-06-09 | 屈折率測定装置及び屈折率測定方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005003386A JP2005003386A (ja) | 2005-01-06 |
| JP4095932B2 true JP4095932B2 (ja) | 2008-06-04 |
Family
ID=34090922
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003163983A Expired - Fee Related JP4095932B2 (ja) | 2003-06-09 | 2003-06-09 | 屈折率測定装置及び屈折率測定方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4095932B2 (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8094308B2 (en) | 2007-02-16 | 2012-01-10 | Tokyo Institute Of Technology | Spectrometric analyzing device and spectrometric analyzing method |
| CN106841048B (zh) * | 2017-03-27 | 2019-05-17 | 南京航空航天大学 | 基于偏振光磁光效应的血糖浓度检测方法及装置 |
| CN106841049B (zh) * | 2017-03-27 | 2019-05-17 | 南京航空航天大学 | 基于偏振光磁光效应的ph值检测方法及装置 |
| CN108562547B (zh) * | 2018-03-13 | 2021-02-19 | 中国科学院福建物质结构研究所 | 激光晶体热应力双折射系数测量装置及其方法 |
| KR102272149B1 (ko) | 2020-02-26 | 2021-07-02 | 주식회사 토모큐브 | 3차원 굴절률 텐서의 측정 방법 및 장치 |
| JP7120338B2 (ja) * | 2021-01-06 | 2022-08-17 | Agc株式会社 | ガラス基板 |
-
2003
- 2003-06-09 JP JP2003163983A patent/JP4095932B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2005003386A (ja) | 2005-01-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9200998B2 (en) | Method and apparatus for ellipsometry measurement | |
| TWI729049B (zh) | 圖案化結構中基於拉曼光譜之測量 | |
| US7889339B1 (en) | Complementary waveplate rotating compensator ellipsometer | |
| EP1397651B1 (en) | Birefringence measurement at deep-ultraviolet wavelengths | |
| TW200809170A (en) | Focused-beam ellipsometer | |
| JP2002504673A (ja) | 複屈折特性測定方法および装置 | |
| JP4791752B2 (ja) | 近接場偏光測定装置 | |
| JP4095932B2 (ja) | 屈折率測定装置及び屈折率測定方法 | |
| Ossikovski et al. | Determining the stress tensor in strained semiconductor structures by using polarized micro-Raman spectroscopy in oblique backscattering configuration | |
| KR19990077575A (ko) | 높은수평분해능으로내부박막응력을계측하는장치및방법 | |
| TWI615604B (zh) | 寬波段消色差複合波片的定標方法 | |
| US6982791B2 (en) | Scatterometry to simultaneously measure critical dimensions and film properties | |
| Irene | A brief history and state of the art of ellipsometry | |
| JP2003516533A (ja) | 偏光解析装置及び偏光解析方法 | |
| CN109115695A (zh) | 一种各向异性体材料光学常数和欧拉角的提取方法 | |
| JP2006258594A (ja) | 自動複屈折測定装置とこれを用いた複屈折測定方法 | |
| JPH10153500A (ja) | 光弾性定数の測定方法および測定装置 | |
| JP2007286011A (ja) | 光学特性計測装置および方法 | |
| KR102176199B1 (ko) | 타원 계측기 | |
| JP2006189411A (ja) | 位相遅延の測定装置及び測定方法 | |
| JP5289989B2 (ja) | 位相差測定装置 | |
| JP2004184225A (ja) | 複屈折測定装置および複屈折試料の軸方位検出方法、複屈折測定装置のキャリブレーション方法。 | |
| KR102617845B1 (ko) | 브루스터 각을 이용한 단결정의 복굴절률 측정 장치 | |
| RU2423684C2 (ru) | Способ оптических измерений для материала | |
| JP3787344B2 (ja) | 液晶素子のパラメータ検出方法及び検出装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060509 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20080208 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20080219 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080310 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110314 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4095932 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120314 Year of fee payment: 4 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120314 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130314 Year of fee payment: 5 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140314 Year of fee payment: 6 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |