JP4078981B2 - 無段変速装置 - Google Patents
無段変速装置 Download PDFInfo
- Publication number
- JP4078981B2 JP4078981B2 JP2003001105A JP2003001105A JP4078981B2 JP 4078981 B2 JP4078981 B2 JP 4078981B2 JP 2003001105 A JP2003001105 A JP 2003001105A JP 2003001105 A JP2003001105 A JP 2003001105A JP 4078981 B2 JP4078981 B2 JP 4078981B2
- Authority
- JP
- Japan
- Prior art keywords
- continuously variable
- variable transmission
- toroidal
- torque
- input
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images














Description
【発明の属する技術分野】
この発明は、車両(自動車)用自動変速装置として利用する、トロイダル型無段変速機を組み込んだ無段変速装置の改良に関し、停車時若しくは極低速での特性を向上させるものである。
【0002】
【従来の技術】
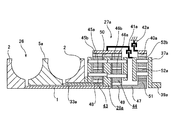
自動車用自動変速装置として、図5〜7に示す様なトロイダル型無段変速機を使用する事が研究され、一部で実施されている。このトロイダル型無段変速機は、ダブルキャビティ型と呼ばれるもので、入力軸1の両端部周囲に入力側ディスク2、2を、ボールスプライン3、3を介して支持している。従ってこれら両入力側ディスク2、2は、互いに同心に、且つ、同期した回転を自在に支持されている。又、上記入力軸1の中間部周囲に出力歯車4を、この入力軸1に対する相対回転を自在として支持している。そして、この出力歯車4の中心部に設けた円筒部の両端部に出力側ディスク5、5を、それぞれスプライン係合させている。従ってこれら両出力側ディスク5、5は、上記出力歯車4と共に、同期して回転する。
【0003】
又、上記各入力側ディスク2、2と上記各出力側ディスク5、5との間には、それぞれ複数個ずつ(通常2〜3個ずつ)のパワーローラ6、6を挟持している。これら各パワーローラ6、6は、それぞれトラニオン7、7の内側面に、支持軸8、8及び複数の転がり軸受を介して、回転自在に支持されている。上記各トラニオン7、7は、それぞれの長さ方向(図5、7の上下方向、図6の表裏方向)両端部に、これら各トラニオン7、7毎に互いに同心に設けられた枢軸9、9を中心として揺動変位自在である。これら各トラニオン7、7を傾斜させる動作は、油圧式のアクチュエータ10、10により、これら各トラニオン7、7を上記枢軸9、9の軸方向に変位させる事で行なうが、総てのトラニオン7、7の傾斜角度は、油圧式及び機械式に互いに同期させる。
【0004】
即ち、前記入力軸1と出力歯車4との間の変速比を変えるべく、上記各トラニオン7、7の傾斜角度を変える場合には、上記各アクチュエータ10、10により上記各トラニオン7、7を、それぞれ逆方向に、例えば、図7の右側のパワーローラ6を同図の下側に、同図の左側のパワーローラ6を同図の上側に、それぞれ変位させる。この結果、これら各パワーローラ6、6の周面と上記各入力側ディスク2、2及び各出力側ディスク5、5の内側面との当接部に作用する、接線方向の力の向きが変化(当接部にサイドスリップが発生)する。そして、この力の向きの変化に伴って上記各トラニオン7、7が、支持板11、11に枢支された枢軸9、9を中心として、互いに逆方向に揺動(傾斜)する。この結果、上記各パワーローラ6、6の周面と上記入力側、出力側各ディスク2、5の内側面との当接位置が変化し、上記入力軸1と出力歯車4との間の回転変速比が変化する。
【0005】
上記各アクチュエータ10、10への圧油の給排状態は、これら各アクチュエータ10、10の数に関係なく1個の制御弁12により行ない、何れか1個のトラニオン7の動きをこの制御弁12にフィードバックする様にしている。この制御弁12は、ステッピングモータ13により軸方向(図7の左右方向、図5の表裏方向)に変位させられるスリーブ14と、このスリーブ14の内径側に軸方向の変位自在に嵌装されたスプール15とを有する。又、上記各トラニオン7、7と上記各アクチュエータ10、10のピストン16、16とを連結するロッド17、17のうち、何れか1個のトラニオン7に付属のロッド17の端部にプリセスカム18を固定しており、このプリセスカム18とリンク腕19とを介して、上記ロッド17の動き、即ち、軸方向の変位量と回転方向との変位量との合成値を上記スプール15に伝達する、フィードバック機構を構成している。又、上記各トラニオン7、7同士の間には同期ケーブル20を掛け渡して、油圧系の故障時にも、これら各トラニオン7、7の傾斜角度を、機械的に同期させられる様にしている。
【0006】
変速状態を切り換える際には、上記ステッピングモータ13により上記スリーブ14を、得ようとする変速比に見合う所定位置にまで変位させて、上記制御弁12の所定方向の流路を開く。この結果、上記各アクチュエータ10、10に圧油が、所定方向に送り込まれて、これら各アクチュエータ10、10が上記各トラニオン7、7を所定方向に変位させる。即ち、上記圧油の送り込みに伴ってこれら各トラニオン7、7が、前記各枢軸9、9の軸方向に変位しつつ、これら各枢軸9、9を中心に揺動する。そして、上記何れか1個のトラニオン7の動き(軸方向及び揺動変位)が、上記ロッド17の端部に固定したプリセスカム18とリンク腕19とを介して上記スプール15に伝達され、このスプール15を軸方向に変位させる。この結果、上記トラニオン7が所定量変位した状態で、上記制御弁12の流路が閉じられ、上記各アクチュエータ10、10への圧油の給排が停止される。
【0007】
この際の上記トラニオン7及び上記プリセスカム18のカム面21の変位に基づく上記制御弁12の動きは、次の通りである。先ず、上記制御弁12の流路が開かれる事に伴って上記トラニオン7が軸方向に変位すると、前述した様に、パワーローラ6の周面と入力側ディスク2及び出力側ディスク5の内側面との当接部に発生するサイドスリップにより、上記トラニオン7が上記各枢軸9、9を中心とする揺動変位を開始する。又、上記トラニオン7の軸方向変位に伴って上記カム面21の変位が、上記リンク腕19を介して上記スプール15に伝わり、このスプール15が軸方向に変位して、上記制御弁12の切り換え状態を変更する。具体的には、上記アクチュエータ10により上記トラニオン7を中立位置に戻す方向に、上記制御弁12が切り換わる。
【0008】
従って上記トラニオン7は、軸方向に変位した直後から、中立位置に向け、逆方向に変位し始める。但し、上記トラニオン7は、中立位置からの変位が存在する限り、上記各枢軸9、9を中心とする揺動を継続する。この結果、上記プリセスカム18のカム面21の円周方向に関する変位が、上記リンク腕19を介して上記スプール15に伝わり、このスプール15が軸方向に変位する。そして、上記トラニオン7の傾斜角度が、得ようとする変速比に見合う所定角度に達した状態で、このトラニオン7が中立位置に復帰すると同時に、上記制御弁12が閉じられて、上記アクチュエータ10への圧油の給排が停止される。この結果上記トラニオン7の傾斜角度が、前記ステッピングモータ13により前記スリーブ14を軸方向に変位させた量に見合う角度になる。
【0009】
上述の様なトロイダル型無段変速機の運転時には、エンジン等の動力源に繋がる駆動軸22により一方(図5、6の左方)の入力側ディスク2を、図示の様なローディングカム式の押圧装置23を介して回転駆動する。この結果、前記入力軸1の両端部に支持された1対の入力側ディスク2、2が、互いに近づく方向に押圧されつつ同期して回転する。そして、この回転が、上記各パワーローラ6、6を介して上記各出力側ディスク5、5に伝わり、前記出力歯車4から取り出される。
【0010】
この様に上記各入力側ディスク2、2から上記各出力側ディスク5、5に動力を伝達する際に、上記各トラニオン7、7には、それぞれの内側面に支持した上記各パワーローラ6、6の周面と上記各ディスク2、5の内側面との転がり接触部(トラクション部)摩擦に伴って、それぞれの両端部に設けた枢軸9、9の軸方向の力が加わる。この力は、所謂2Ftと呼ばれるもので、その大きさは、上記各入力側ディスク2、2から上記各出力側ディスク5、5(或は出力側ディスク5、5から入力側ディスク2、2)に伝達するトルクに比例する。そして、この様な力2Ftは、前記各アクチュエータ10、10により支承する。従って、トロイダル型無段変速機の運転時に、これら各アクチュエータ10、10を構成するピストン16、16の両側に存在する1対の油圧室24a、24b同士の間の圧力差は、上記力2Ftの大きさに比例する。
【0011】
上記入力軸1と出力歯車4との回転速度を変える場合で、先ず入力軸1と出力歯車4との間で減速を行なう場合には、上記各アクチュエータ10、10により上記各トラニオン7、7を上記各枢軸9、9の軸方向に移動させ、これら各トラニオン7、7を図6に示す位置に揺動させる。そして、上記各パワーローラ6、6の周面をこの図6に示す様に、上記各入力側ディスク2、2の内側面の中心寄り部分と上記各出力側ディスク5、5の内側面の外周寄り部分とにそれぞれ当接させる。反対に、増速を行なう場合には、上記各トラニオン7、7を図6と反対方向に揺動させ、上記各パワーローラ6、6の周面を、この図6に示した状態とは逆に、上記各入力側ディスク2、2の内側面の外周寄り部分と上記各出力側ディスク5、5の内側面の中心寄り部分とに、それぞれ当接する様に、上記各トラニオン7、7を傾斜させる。これら各トラニオン7、7の傾斜角度を中間にすれば、入力軸1と出力歯車4との間で、中間の変速比(速度比)を得られる。
【0012】
上述の図5〜7に示したトロイダル型無段変速機の場合、ローディングカム式の押圧装置23を使用している為、この押圧装置23が発生する押圧力は、上記入力軸1に加わるトルクに応じて変化するのみである。これに対して、特許文献1には、図8に示す様な、純油圧式の押圧装置23aが、特許文献2には、図9に示す様な、機械式と油圧式とを組み合わせた押圧装置23bが、それぞれ記載されている。このうち、図8に示した純油圧式の押圧装置23aの場合には、トラクション部で必要とする面圧は、油圧のみで発生させる。これに対して、図9に示した機械式と油圧式とを組み合わせた押圧装置23bの場合、機械式に発生した押圧力の不足分を、油圧式に発生させる。何れの構造の場合でも、上記トラクション部の面圧を電気的に(油圧を制御する事により所望の値に)調節できる。
【0013】
更に、上述の様に構成され作用するトロイダル型無段変速機を実際の自動車用の無段変速機に組み込む場合、遊星歯車機構等の歯車式の差動ユニットと組み合わせて無段変速装置を構成する事が、従来から提案されている。上記特許文献1に記載されたものもその一種であるが、この構造は、高速走行時に於ける、トロイダル型無段変速機26を通過するトルクの低減と、伝達効率の向上とを目的としたものである。この様な特許文献1に記載された構造は、パワー・スプリット型と呼ばれるもので、入力軸を一方向に回転させたまま、出力軸の回転状態を、停止状態を挟んで正転、逆転に切り換える事はできない。この為、トルクコンバータ、電磁クラッチ等の発進クラッチ25が必要になる。
【0014】
これに対して特許文献3には、所謂ギヤード・ニュートラルと呼ばれ、入力軸を一方向に回転させたまま、出力軸の回転状態を、停止状態を挟んで正転、逆転に切り換えられる無段変速装置が記載されている。図10は、この様な特許文献3に記載された無段変速装置を示している。この無段変速装置は、トロイダル型無段変速機26と遊星歯車式変速機27とを組み合わせて成る。このうちのトロイダル型無段変速機26は、入力軸1と、1対の入力側ディスク2、2と、出力側ディスク5aと、複数のパワーローラ6、6とを備える。図示の例では、この出力側ディスク5aは、1対の出力側ディスクの外側面同士を突き合わせて一体とした如き構造を有する。
【0015】
又、上記遊星歯車式変速機27は、上記入力軸1及び一方(図10の右方)の入力側ディスク2に結合固定されたキャリア28を備える。このキャリア28の径方向中間部に、その両端部にそれぞれ遊星歯車素子29a、29bを固設した第一の伝達軸30を、回転自在に支持している。又、上記キャリア28を挟んで上記入力軸1と反対側に、その両端部に太陽歯車31a、31bを固設した第二の伝達軸32を、上記入力軸1と同心に、回転自在に支持している。そして、上記各遊星歯車素子29a、29bと、上記出力側ディスク5aにその基端部(図10の左端部)を結合した中空回転軸33の先端部(図10の右端部)に固設した太陽歯車34又は上記第二の伝達軸32の一端部(図10の左端部)に固設した太陽歯車31aとを、それぞれ噛合させている。又、一方(図10の左方)の遊星歯車素子29aを、別の遊星歯車素子35を介して、上記キャリア28の周囲に回転自在に設けたリング歯車36に噛合させている。
【0016】
一方、上記第二の伝達軸32の他端部(図10の右端部)に固設した太陽歯車31bの周囲に設けた第二のキャリア37に遊星歯車素子38a、38bを、回転自在に支持している。尚、この第二のキャリア37は、上記入力軸1及び第二の伝達軸32と同心に配置された、出力軸39の基端部(図10の左端部)に固設されている。又、上記各遊星歯車素子38a、38bは、互いに噛合すると共に、一方の遊星歯車素子38aが上記太陽歯車31bに、他方の遊星歯車素子38bが、上記第二のキャリア37の周囲に回転自在に設けた第二のリング歯車40に、それぞれ噛合している。又、上記リング歯車36と上記第二のキャリア37とを低速用クラッチ41により係脱自在とすると共に、上記第二のリング歯車40とハウジング等の固定の部分とを、高速用クラッチ42により係脱自在としている。
【0017】
上述の様な、図10に示した無段変速装置の場合、上記低速用クラッチ41を接続すると共に上記高速用クラッチ42の接続を断った、所謂低速モード状態では、上記入力軸1の動力が上記リング歯車36を介して上記出力軸39に伝えられる。そして、前記トロイダル型無段変速機26の変速比を変える事により、無段変速装置全体としての変速比、即ち、上記入力軸1と上記出力軸39との間の変速比が変化する。この様な低速モード状態では、無段変速装置全体としての変速比は、無限大に変化する。即ち、上記トロイダル型無段変速機26の変速比を調節する事により、上記入力軸1を一方向に回転させた状態のまま上記出力軸39の回転状態を、停止状態を挟んで、正転、逆転の変換自在となる。
【0018】
尚、この様な低速モード状態での加速若しくは定速走行時に、上記トロイダル型無段変速機26を通過するトルク(通過トルク)は、上記入力軸1から、キャリヤ28及び第一の伝達軸30と太陽歯車34と中空回転軸33とを介して出力側ディスク5aに加わり、更にこの出力側ディスク5aから各パワーローラ6、6を介して各入力側ディスク2、2に加わる。即ち、加速若しくは定速走行時に上記トロイダル型無段変速機26を通過するトルクは、上記各入力側ディスク2、2が上記各パワーローラ6、6からトルクを受ける方向に循環する。
【0019】
これに対して、上記低速用クラッチ41の接続を断ち、上記高速用クラッチ42を接続した、所謂高速モード状態では、上記入力軸1の動力が上記第一、第二の伝達軸30、32を介して上記出力軸39に伝えられる。そして、上記トロイダル型無段変速機26の変速比を変える事により、無段変速装置全体としての変速比が変化する。この場合には、上記トロイダル型無段変速機26の変速比を大きくする程、無段変速装置全体としての変速比が大きくなる。
尚、この様な高速モード状態での加速若しくは定速走行時に、上記トロイダル型無段変速機26を通過するトルクは、各入力側ディスク2、2が各パワーローラ6、6にトルクを付加する方向に加わる。
【0020】
例えば図10に示す様な構造を有し、入力軸1を回転させた状態のまま出力軸39を停止させる、所謂無限大の変速比を実現できる無段変速装置の場合、出力軸39を停止させた状態を含み、変速比を極端に大きくした状態で、上記トロイダル型無段変速機26に加わるトルクを適正値に維持する事が、このトロイダル型無段変速機26の耐久性確保と、運転操作の容易性確保との面から重要である。何となれば、「回転駆動力=回転速度×トルク」の関係から明らかな通り、変速比が極端に大きく、上記入力軸1が回転したまま上記出力軸39が停止又は極低速で回転する状態では、上記トロイダル型無段変速機26を通過するトルク(通過トルク)が、上記入力軸1に加わるトルクに比べて大きくなる。この為、上記トロイダル型無段変速機26の耐久性を、このトロイダル型無段変速機26を大型化する事なく確保する為には、上述の様にトルクを適正値に納める為に厳密な制御を行なう必要が生じる。具体的には、上記入力軸1に入力するトルクをできるだけ小さくしつつ、上記出力軸39を停止させる為、駆動源を含めた制御が必要になる。
【0021】
又、上記変速比が極端に大きな状態では、上記トロイダル型無段変速機26の変速比が僅かに変化した場合にも、上記出力軸39に加わるトルクが大きく変化する。この為、上記トロイダル型無段変速機26の変速比調節が厳密に行なわれないと、運転者に違和感を与えたり、運転操作を行ないにくくする可能性がある。例えば、自動車用の自動変速装置の場合、停止時には運転者がブレーキを踏んだままで、停止状態を維持する事が行なわれる。この様な場合に、上記トロイダル型無段変速機26の変速比調節が厳密に行なわれず、上記出力軸39に大きなトルクが加わると、停車時に上記ブレーキペダルを踏み込む為に要する力が大きくなり、運転者の疲労を増大させる。逆に、発進時に上記トロイダル型無段変速機26の変速比調節が厳密に行なわれず、上記出力軸39に加わるトルクが小さ過ぎると、滑らかな発進が行なわれなくなったり、上り坂での発進時に車両が後退する可能性がある。従って、停止時若しくは極低速走行時には、駆動源から上記入力軸1に伝達するトルクを制御する他、上記トロイダル型無段変速機26の変速比調節を厳密に行なう必要がある。
【0022】
この様な点を考慮して、特許文献4には、トラニオンを変位させる為の油圧式のアクチュエータ部分の圧力差を直接制御する事により、トロイダル型無段変速機を通過するトルク(通過トルク)を規制する構造が記載されている。
但し、上記特許文献4に記載されている様な構造の場合には、上記圧力差のみで制御を行なう為、上記通過トルクが目標値に一致した瞬間にトラニオンの姿勢を停止させる事が難しい。具体的には、トルク制御の為に上記トラニオンを変位させる量が大きくなる為、上記通過トルクが目標値に一致した瞬間にトラニオンが停止せずにそのまま変位を継続する、所謂オーバシュートが生じ易く、上記通過トルクの制御が安定しない。
【0023】
特に、図5〜7に示した一般的なハーフトロイダル型無段変速機の様に、トラニオン7、7の両端部に設けた各枢軸9、9の方向と、入力側、出力側各ディスク2、5の中心軸の方向とが互いに直角方向である、所謂キャストアングルを持たないトロイダル型無段変速機26の場合に、上記オーバシュートが生じ易い。これに対して、一般的なフルトロイダル型無段変速機の様に、キャストアングルを持った構造の場合には、オーバシュートを収束させる方向の力が作用する為、上記特許文献4に記載されている様な構造でも、十分なトルク制御を行なえるものと考えられる。
【0024】
【特許文献1】
特開2002−310252号公報
【特許文献2】
特開2000−65193号公報
【特許文献3】
特開2000−220719号公報
【特許文献4】
特開平10−103461号公報
【非特許文献1】
田中裕久著「トロイダルCVT」株式会社コロナ社、2000年7月13日、p.13〜14
【非特許文献2】
「NSK Technical Journal No.670」2000年、p.8
【0025】
【先発明の説明】
この様な事情に鑑みて、本発明者は先に、一般的なハーフトロイダル型無段変速機の様に、キャストアングルを持たないトロイダル型無段変速機を組み込んだ無段変速装置でも、このトロイダル型無段変速機を通過するトルク(通過トルク)の制御を厳密に行なえる方法及び装置を発明した(特願2002−116185号)。
図11は、この様な先発明の制御方法及び装置の対象となる、無段変速装置の構造の1例を示している。この図11に示した無段変速装置は、前述の図10に示した従来から知られている無段変速装置と同様の機能を有するもであるが、遊星歯車式変速機27a部分の構造を工夫する事により、この遊星歯車式変速機27a部分の組立性を向上させている。
【0026】
入力軸1及び1対の入力側ディスク2、2と共に回転するキャリア28aの両側面に、それぞれがダブルピニオン型である、第一、第二の遊星歯車43、44を支持している。即ち、これら第一、第二の遊星歯車43、44は、それぞれ1対ずつの遊星歯車素子45a、45b、46a、46bにより構成している。そして、これら各遊星歯車素子45a、45b、46a、46bを、互いに噛合させると共に、内径側の遊星歯車素子45a、46aを、出力側ディスク5aにその基端部(図11の左端部)を結合した中空回転軸33aの先端部(図11の右端部)及び伝達軸47の一端部(図11の左端部)にそれぞれ固設した第一、第二の太陽歯車48、49に、外径側の遊星歯車素子45b、46bをリング歯車50に、それぞれ噛合させている。
【0027】
一方、上記伝達軸47の他端部(図11の右端部)に固設した第三の太陽歯車51の周囲に設けた第二のキャリア37aに遊星歯車素子52a、52bを、回転自在に支持している。尚、この第二のキャリア37aは、上記入力軸1と同心に配置された出力軸39aの基端部(図11の左端部)に固設されている。又、上記各遊星歯車素子52a、52bは、互いに噛合すると共に、内径側の遊星歯車素子52aを上記第三の太陽歯車51に、外径側の遊星歯車素子52bを、上記第二のキャリア37aの周囲に回転自在に設けた第二のリング歯車40aに、それぞれ噛合させている。又、上記リング歯車50と上記第二のキャリア37aとを低速用クラッチ41aにより係脱自在とすると共に、上記第二のリング歯車40aとハウジング等の固定の部分とを、高速用クラッチ42aにより係脱自在としている。
【0028】
この様に構成する改良された無段変速装置の場合、上記低速用クラッチ41aを接続し、上記高速用クラッチ42aの接続を断った状態では、上記入力軸1の動力が上記リング歯車50を介して上記出力軸39aに伝えられる。そして、トロイダル型無段変速機26の変速比を変える事により、無段変速装置全体としての変速比eCVT 、即ち、上記入力軸1と上記出力軸39aとの間の変速比が変化する。この際のトロイダル型無段変速機26の変速比eCVU と無段変速装置全体としての変速比eCVT との関係は、上記リング歯車50の歯数m50と前記第一の太陽歯車48の歯数m48との比をi1 (=m50/m48)とした場合に、次の(1)式で表される。
eCVT =(eCVU +i1 −1)/i1 −−− (1)
そして、例えば上記歯数同士の比i1 が2である場合に、上記両変速比eCVU 、eCVT 同士の関係が、図12に線分αで示す様に変化する。
【0029】
これに対して、上記低速用クラッチ41aの接続を断ち、上記高速用クラッチ42aを接続した状態では、上記入力軸1の動力が前記第一の遊星歯車43、上記リング歯車50、前記第二の遊星歯車44、前記伝達軸47、前記各遊星歯車素子52a、52b、上記第二のキャリア37aを介して、上記出力軸39aに伝えられる。そして、上記トロイダル型無段変速機26の変速比eCVU を変える事により、無段変速装置全体としての変速比eCVT が変化する。この際のトロイダル型無段変速機26の変速比eCVU と無段変速装置全体としての変速比eCVT との関係は、次の(2)式の様になる。尚、この(2)式中、i1 は上記リング歯車50の歯数m50と前記第一太陽歯車48の歯数m48との比(m50/m48)を、i2 は上記リング歯車50の歯数m50と前記第二の太陽歯車49の歯数m49との比(m50/m49)を、i3 は前記第二のリング歯車40aの歯数m40と前記第三の太陽歯車51の歯数m51との比(m40/m51)を、それぞれ表している。
eCVT ={1/(1−i3 )}・{1+(i2 /i1 )(eCVU −1)}−−− (2)
そして、上記各比のうち、i1 が2、i2 が2.2、i3 が2.8である場合に、上記両変速比eCVU 、eCVT 同士の関係が、図12に線分βで示す様に変化する。
【0030】
上述の様に構成し作用する無段変速装置の場合、図12の線分αから明らかな通り、前記入力軸1を回転させた状態のまま上記出力軸39aを停止させる、所謂変速比無限大の状態を造り出せる。但し、この様に入力軸1を回転させた状態のまま上記出力軸39aを停止させたり、或は極く低速で回転させる状態では、前述した通り、上記トロイダル型無段変速機26を通過するトルク(通過トルク)が、駆動源であるエンジンから上記入力軸1に加えられるトルクよりも大きくなる。この為、車両の停止時又は微速運行時には、上記通過トルクが過大(或は過小に)にならない様にする為、駆動源から上記入力軸1に入力されるトルクを適正に規制する必要がある。
【0031】
又、上記微速運行時、出力軸39aを停止させる状態に近い状態、即ち、上記無段変速装置の変速比が非常に大きく、上記入力軸1の回転速度に比べて上記出力軸39aの回転速度が大幅に遅い状態では、この出力軸39aに加わるトルクが、上記無段変速装置の変速比の僅かな変動により、大幅に変動する。この為、円滑な運転操作を確保する為に、やはり駆動源から上記入力軸1に入力されるトルクを適正に規制する必要がある。
【0032】
尚、この様な低速モード状態での加速若しくは定速走行時に、上記通過トルクは、前述の図10に示す従来構造と同様に、入力軸1からキャリヤ28a及び第一の遊星歯車43と第一の太陽歯車48と中空回転軸33aとを介して出力側ディスク5aに加わり、更にこの出力側ディスク5aから各パワーローラ6、6(図10参照)を介して各入力側ディスク2、2に加わる。即ち、加速若しくは定速走行時に上記通過トルクは、上記各入力側ディスク2、2が上記各パワーローラ6、6からトルクを受ける方向に循環する。
【0033】
この為に、先発明による変速比の制御方法及び装置の場合には、図13に示す様にして、上記駆動源から上記入力軸1に入力されるトルクを適正に規制する様にしている。先ず、上記駆動源であるエンジンの回転速度を大まかに制御する。即ち、このエンジンの回転速度を、図13のw範囲内の点aに規制する。これと共に、この制御されたエンジンの回転速度に上記無段変速装置の入力軸1の回転速度を一致させる為に必要とされる、上記トロイダル型無段変速機26の変速比を設定する。この設定作業は、前述の(1)式に基づいて行なう。即ち、先発明の方法によりエンジンから上記入力軸1に伝達するトルクを厳密に規制する必要があるのは、前記低速用クラッチ41aを接続し、前記高速用クラッチ42aの接続を断った、所謂低速モード時である。従って、上記入力軸1の回転速度を、必要とする出力軸39aの回転速度に対応した値とすべく、上記(1)式により、上記トロイダル型無段変速機26の変速比を設定する。
【0034】
又、上記トロイダル型無段変速機26に組み込んだトラニオン7、7を枢軸9、9の軸方向に変位させる為の油圧式のアクチュエータ10、10を構成する1対の油圧室24a、24b(図7、15参照)の圧力差を、油圧センサ53(後述する図1参照)により測定する。この油圧測定作業は、上記エンジンの回転速度を大まか(但し回転速度を一定に保つ状態)に制御し、これに対応して、上述の様に、(1)式により上記トロイダル型無段変速機26の変速比を設定した状態で行なう。そして、測定作業に基づいて求めた上記圧力差により、上記トロイダル型無段変速機26を通過するトルク(通過トルク)TCVU を算出する。
【0035】
即ち、上記圧力差は、上記トロイダル型無段変速機26の変速比が一定である限り、このトロイダル型無段変速機26を通過するトルクTCVU に比例する為、上記圧力差により、このトルクTCVU を求める事ができる。この理由は、前述した様に、上記各アクチュエータ10、10が、入力側ディスク2、2から上記出力側ディスク5a(或は出力側ディスク5aから入力側ディスク2、2)に伝達されるトルク(=トロイダル型無段変速機26を通過するトルクTCVU )に比例する大きさを有する、2Ftなる力を支承する為である。
【0036】
一方、上記トルクTCVU は、次の(3)式によっても求められる。
TCVU =eCVU ・TIN/{eCVU +(i1 −1)ηCVU } −−− (3)
この(3)式中、eCVU は上記トロイダル型無段変速機26の変速比を、TINは上記エンジンから前記入力軸1に入力されるトルクを、i1 は第一の遊星歯車43に関する遊星歯車変速機の歯数比(リング歯車50の歯数m50と第一の太陽歯車48の歯数m48との比)を、ηCVU は上記トロイダル型無段変速機26の効率を、それぞれ表している。
【0037】
そこで、上記圧力差から求めた、実際にトロイダル型無段変速機26を通過するトルクTCVU1と、上記(3)式から求めた、目標とする通過トルクTCVU2とに基づいて、この実際に通過するトルクTCVU1と目標値TCVU2との偏差△T(=TCVU1−TCVU2)を求める。そして、この偏差△Tを解消する(△T=0とする)方向に、上記トロイダル型無段変速機26の変速比を調節する。尚、上記トルクの偏差△Tと、上記圧力差の偏差とは比例関係にあるので、上記変速比の調節作業は、トルクの偏差によっても、圧力差の偏差によっても行なえる。即ち、トルクの偏差による変速比制御と、圧力差の偏差による変速比制御とは、技術的に見て同じ事である。
【0038】
例えば、図13に示す様に、上記トロイダル型無段変速機26を実際に通過するトルクTCVU1(測定値)を目標値TCVU2に規制する領域で、前記エンジンが前記入力軸1を駆動するトルクTINが、この入力軸1の回転速度が高くなる程急激に低くなる方向に変化する場合に就いて考える。この様なエンジンの特性は、電子制御されたエンジンであれば、低速回転域でも容易に得られる。この様なエンジン特性を有する場合で、上記トルクの測定値TCVU1が同じく目標値TCVU2に比べて、各入力側ディスク2、2が各パワーローラ6、6(図6、7、9、10参照)からトルクを受ける方向の偏差を有する場合には、上記入力軸1を駆動するトルクTINを小さくする為にエンジンの回転速度を増大すべく、無段変速装置全体としての変速比を減速側に変位させる。この為に、上記トロイダル型無段変速機26の変速比を、増速側に変速する。
【0039】
但し、ブレーキペダルを踏んで停止した状態(出力軸の回転速度=0)では、上記トロイダル型無段変速機26の内部で生じる滑り、即ち、入力側、出力側各ディスク2、5aの内側面と各パワーローラ6、6の周面(図6、7、9、10参照)との当接部(トラクション部)で生じる滑り(クリープ)により吸収できる範囲内で、上記トロイダル型無段変速機26の変速比の制御を行なう。従って、この変速比を調節できる許容範囲は、上記当接部に無理な力が加わらない範囲に止まり、低速走行時の場合に比べて限られたものとなる。
【0040】
例えば、図13で、上記目標値TCVU2がa点に存在する場合に、上記測定値TCVU1が同図のb点に存在する場合には、上記各入力側ディスク2、2が上記パワーローラ6、6からトルクを受ける方向の偏差を有する状態となる。そこで、上記トロイダル型無段変速機26の変速比eCVU を増速側に変更して、無段変速装置(T/M)全体としての変速比eCVT を減速側に変更する。これに合わせてエンジンの回転速度を増速し、トルクを下げる。反対に、上記測定値TCVU1が同図のc点に存在する場合には、上記各入力側ディスク2、2が上記パワーローラ6、6にトルクを付加する方向の偏差を有する状態となる。この場合には、上述した場合とは逆に、上記トロイダル型無段変速機26の変速比eCVU を減速側に変更して、無段変速装置(T/M)全体としての変速比eCVT を増速側に変更する。これに合わせて、エンジンの回転速度を減速してトルクを上昇させる。
【0041】
以下、上記圧力差から求めた、実際にトロイダル型無段変速機26を通過するトルクTCVU1が目標値に一致するまで、上述した動作を繰り返し行なう。即ち、1回のトロイダル型無段変速機26の変速制御だけでは、このトロイダル型無段変速機26を通過するトルクTCVU1を目標値TCVU2に一致させられない場合には、上述した動作を繰り返し行なう。この結果、前記エンジンが前記入力軸1を回転駆動するトルクTINを、このトロイダル型無段変速機26を通過するトルクTCVU を目標値TCVU2にする値に近付ける事ができる。尚、この様な動作は、無段変速装置の制御器に組み込んだマイクロコンピュータからの指令により、自動的に、且つ、短時間の間に行なわれる。
【0042】
尚、図14は、上記トロイダル型無段変速機26を通過するトルクTCVU と上記エンジンが上記入力軸1を回転駆動するトルクTINとの比(左側縦軸)と、無段変速装置全体としての変速比eCVT (横軸)と、上記トロイダル型無段変速機26の変速比eCVU (右側縦軸)との関係を示している。実線aが上記通過トルクTCVU と駆動トルクTINとの比と、無段変速装置全体としての変速比eCVT との関係を、破線bが上記両変速比eCVT 、eCVU 同士の関係を、それぞれ示している。先発明の場合、上記無段変速装置全体としての変速比eCVT を所定値に規制した状態で、上記トロイダル型無段変速機26を実際に通過するトルクTCVU1を上記実線a上の点で表される目標値(TCVU2)に規制すべく、上記トロイダル型無段変速機26の変速比eCVU を規制するものである。
【0043】
先発明の場合、この様に上記トロイダル型無段変速機26を実際に通過するトルクTCVU1を前記目標値TCVU2である上記実線a上の点に規制する為の制御を2段階に分けて、即ち、エンジンの回転速度を大まかに、即ち、上記目標値TCVU2を得られるであろうと考えられる回転速度に制御した後、この回転速度に合わせてトロイダル型無段変速機26の変速比制御を行なう。この為、従来方法の様なオーバシュートを生じさせる事なく、或は仮に生じたとしても実用上問題ない程度に低く抑えて、上記トロイダル型無段変速機26を実際に通過するトルクTCVU1を上記目標値TCVU2に規制できる。
【0044】
尚、前述の様に、ブレーキペダルを踏んで停止した状態で前記出力軸39a(図11)には、上記トロイダル型無段変速機26の内部で生じる滑りに基づいて、駆動力(トルク)が加わる。このトルクの大きさは、従来から普及している、トルクコンバータを備えた一般的な自動変速装置で生じるクリープ力に見合う値に設定する事が考えられる。この理由は、一般的な自動変速装置の操作に慣れた運転者に違和感を与えない為である。又、上記トルクの方向は、運転席に設けた操作レバーの操作位置により決定する。この操作レバーが前進方向位置(Dレンジ)を選択された場合には、上記出力軸39aに前進方向にトルクを付与し、後退方向位置(Rレンジ)を選択された場合には、後退方向にトルクを付与する。
【0045】
次に、上述の様にトロイダル型無段変速機26を実際に通過するトルクTCVU1を目標値TCVU2に一致させるべく、このトロイダル型無段変速機26の変速比を制御する部分の回路に就いて、図15により説明する。トラニオン7を枢軸9、9(図7参照)の軸方向(図15の上下方向)に変位させる為の油圧式のアクチュエータ10を構成する1対の油圧室24a、24bに、制御弁12を通じて、圧油を給排自在としている。この制御弁12を構成するスリーブ14は、ステッピングモータ13により、ロッド82とリンク腕83とを介して軸方向に変位自在としている。又、上記制御弁12を構成するスプール15は、リンク腕19とプリセスカム18とロッド17とを介して上記トラニオン7と係合させ、このトラニオン7の軸方向変位及び揺動変位に伴って、軸方向に変位自在としている。以上の構成は、従来から知られている、トロイダル型無段変速機の変速比制御機構と、基本的に同じである。
【0046】
特に先発明の場合には、上記スリーブ14を、上記ステッピングモータ13により駆動するのに加えて、油圧式の差圧シリンダ54によっても駆動する様にしている。即ち、上記スリーブ14に基端部を結合した上記ロッド82の先端部を上記リンク腕83の中間部に枢支すると共に、このリンク腕83の両端部に設けた長孔に、上記ステッピングモータ13或は上記差圧シリンダ54の出力部に設けたピンを係合させている。上記リンク腕83の一端部に設けた長孔内のピンが押し引きされる場合、他端部の長孔内のピンは支点となる。この様な構成により、上記スリーブ14を、上記ステッピングモータ13による他、上記差圧シリンダ54によっても軸方向に変位させられる様にしている。先発明の場合、この差圧シリンダ54による上記スリーブ14の変位により、上記トロイダル型無段変速機26を通過するトルクTCVU に応じてこのトロイダル型無段変速機26の変速比eCVU を調節する様にしている。
【0047】
この為に先発明の場合には、上記差圧シリンダ54に設けた1対の油圧室55a、55b内に、補正用制御弁56を通じて、互いに異なる油圧を導入自在としている。これら各油圧室55a、55bに導入される油圧は、前記アクチュエータ10を構成する1対の油圧室24a、24b内に作用する油圧PDOWN、PUPの差圧△Pと、上記補正用制御弁56の開度調節用の1対の電磁弁57a、57bの出力圧の差圧△P0 とに基づいて決定される。即ち、これら両電磁弁57a、57bの開閉は、これら両電磁弁57a、57bの出力圧の差圧△P0 が前記トロイダル型無段変速機26の目標トルクTCVU2に対応する目標差圧となる様に、図示しない制御器(コントローラ)により演算され、この制御器から出力される出力信号に基づいて制御される。従って、上記補正用制御弁56を構成するスプール58には、上記アクチュエータ10の油圧室24a、24b内に作用する油圧の差圧△Pに応じた力と、これに対抗する力となる、上記目標トルクTCVU2に対応する目標差圧である上記電磁弁57a、57bの出力圧の差圧△P0 とが作用する。
【0048】
上記トロイダル型無段変速機26を実際に通過するトルクTCVU1と上記目標トルクTCVU2とが一致する場合、即ち、これら通過トルクTCVU1と目標トルクTCVU2との差△Tが0の場合には、上記アクチュエータ10の油圧室24a、24b内に作用する油圧の差圧△Pに応じた力と、上記電磁弁57a、57bの出力圧の差圧△P0 に応じた力とが釣り合う。この為、上記補正用制御弁56を構成するスプール58は中立位置となり、上記差圧シリンダ54の油圧室55a、55bに作用する圧力も等しくなる。この状態では、この差圧シリンダ54のスプール59は中立位置となり、上記トロイダル型無段変速機26の変速比は変わらない(補正されない)。
【0049】
一方、上記トロイダル型無段変速機26を実際に通過するトルクTCVU1と上記目標トルクTCVU2とに差が生じると、上記アクチュエータ10の油圧室24a、24b内に作用する油圧の差圧△Pに応じた力と、上記電磁弁57a、57bの出力圧の差圧△P0 に応じた力との釣り合いが崩れる。そして、上記通過トルクTCVU1と目標トルクTCVU2との差△Tの大きさ及び方向に応じて上記補正用制御弁56を構成するスプール58が軸方向に変位し、上記差圧シリンダ54の油圧室55a、55b内に、上記△Tの大きさ及び方向に応じた適切な油圧が導入される。そして、上記差圧シリンダ54のスプール59が軸方向に変位し、これに伴って、前記制御弁12を構成するスリーブ14が軸方向に変位する。この結果、前記トラニオン7が枢軸9、9の軸方向に変位して、上記トロイダル型無段変速機26の変速比が変わる(補正される)。尚、この様にして変速比が変化する方向、及び変化する量は、前述の図13〜14により説明した通りである。又、この様にトロイダル型無段変速機26の変速比が変位する量、即ち補正される量(変速比の補正量)は、このトロイダル型無段変速機26の変速比幅に対して十分小さいものである。この為に、上記差圧シリンダ54のスプール59のストロークは、前記ステッピングンモータ13の出力部のストロークよりも十分に小さくしている。
【0050】
【発明が解決しようとする課題】
上述した先発明に係る無段変速装置の場合、停車時若しくは極低速走行時に、この無段変速装置に組み込んだトロイダル型無段変速機の変速比調節を厳密に行なえるが、運転者に違和感を与えない事を考慮した場合には、更なる改良を施す余地がある。即ち、停車時若しくは極低速走行時には、上記トロイダル型無段変速比の変速比が無限大若しくは極大である為、前述した「回転駆動力=回転速度×トルク」の関係から明らかな通り、上記トロイダル型無段変速機の変速比が僅かに変動しただけでも、このトロイダル型無段変速機を通過して出力軸に加わるトルクが大きく変動する。この為、ブレーキペダルを踏み込んで車両を停止させたままとする場合に、何らかの外乱が作用して上記トロイダル型無段変速機の変速比が変動すると、車両を停止させる為にブレーキペダルを踏み込んでおく為に要する踏力、若しくは、クリープ力に基づいてブレーキペダルを踏みつつ極低速で走行させる為にブレーキペダルを踏む為に要する踏力が大きく変動する。この様な踏力の変動は、運転者に違和感を与えるだけでなく、この運転者の疲労を増大させる原因となる為、好ましくない。
本発明の無段変速装置は、この様な事情に鑑みて発明したものである。
【0051】
【課題を解決するための手段】
本発明の無段変速装置は、前述の図10に示した従来から知られている、或は図11に示した先発明に係る無段変速装置と同様に、入力軸と、出力軸と、トロイダル型無段変速機と、複数の歯車を組み合わせて成る歯車式の差動ユニットと、このトロイダル型無段変速機の変速比の変更を制御する為の制御器とを備える。
又、上記トロイダル型無段変速機は、上記差動ユニットの第一の入力部と共に上記入力軸により回転駆動される入力側ディスクと、この入力側ディスクと同心に、且つ、この入力側ディスクに対する相対回転を自在として支持され、上記差動ユニットの第二の入力部に接続された出力側ディスクと、これら両ディスク同士の間に挟持された複数個のパワーローラと、これら両ディスクを互いに近づけ合う方向に押圧する油圧式の押圧装置とを備えたものである。この油圧式の押圧装置は、前述の図8に示した様な純油圧式のものでも、或は図9に示した様な、機械式のローディングカム装置と油圧式の押圧装置とを組み合わせたものでも良い。要は、押圧力を油圧で調整できるものであれば良い。
又、上記差動ユニットは、上記第一、第二の入力部同士の間の速度差に応じた回転を取り出して、上記出力軸に伝達するものである。
【0052】
更に、上記制御器は、次の▲1▼▲2▼の機能を有するものである。
▲1▼ 上記トロイダル型無段変速機の変速比を調節して上記差動ユニットを構成する複数の歯車の相対的変位速度を変化させる事により、上記入力軸を一方向に回転させた状態のまま上記出力軸の回転状態を、停止状態を挟んで正転及び逆転に変換自在とする機能。
▲2▼ 車両が停止若しくは極低速走行時(例えば、車速が2km/h以下、更に好ましくは1km/h以下の場合)に上記押圧装置が発生する押圧力を、通常走行時(車速が2km/hを越える場合、更に好ましくは1km/hを越える場合)に発生する押圧力に比べて小さくする機能。
【0053】
尚、好ましくは、請求項2に記載した様に、上記制御器に、車両が停止若しくは極低速走行時に、トロイダル型無段変速機の変速比を変える事により、このトロイダル型無段変速機を通過するトルクを調節する機能(前述した先発明の機能)を持たせる。
又、本発明を実施する場合に、請求項3に記載した様に、上記制御器の▲2▼の機能は、入力軸を回転させたまま出力軸を停止させる状態時にのみ、押圧装置が発生する押圧力を、他の状態の場合に比べて小さくするものとする事もできる。
【0054】
【作用】
上述の様に構成する本発明の無段変速装置の場合、トロイダル型無段変速機の変速比の変動に伴う、このトロイダル型無段変速機を通過するトルクの変動を低く抑える事ができる。即ち、停止若しくは極低速走行時に、押圧装置が発生する押圧力を小さくすると、トラクション部のトラクション係数が高くなり、このトラクション部のクリープ量(滑り量)が多くなる。この為、外乱によりこのトロイダル型無段変速機の変速比が多少変動した場合でも、このトロイダル型無段変速機を通過するトルクの変動を小さく抑えられる。この結果、車両を停止若しくは極低速で走行させる際に、外乱により上記トロイダル型無段変速機の変速比が多少変動した場合でも、ブレーキペダルを踏み込む為に要する踏力の変動を低く抑えられる。
これに対して、車両を通常走行させる際には、上記押圧装置が発生する押圧力が十分に大きくなる。この状態では、上記トラクション部のクリープ量が少なくなり、このトラクション部での伝達効率を確保できる。
【0055】
【発明の実施の形態】
図1、4は、本発明の実施の形態の第1例を示している。先ず、図1のブロック図により、本例の無段変速装置の全体構成に就いて説明する。この図1中、太矢印は動力の伝達経路を、実線は油圧回路を、破線は電気回路を、それぞれ示している。エンジン60の出力は、ダンパ61を介して、入力軸1に入力される。このうちのダンパ61は、上記エンジン60の回転を平滑化して上記入力軸1に伝達する、弾性継手としての役目を有する。尚、本発明の特徴は、車両の停止若しくは極低速走行時にトロイダル型無段変速機26の変速比が多少変動した場合でも、このトロイダル型無段変速機26を通過して出力軸39aに伝わるトルクが変動する事を抑える点にある。図面に現れる無段変速装置自体の構造は、前述の図10に示した従来構造、或は図11に示した先発明に係る構造と同様である。そこで、上記図1で、この図11と同等部分に関しては、できる限り、この図11に使用した符号を付して説明する。
【0056】
上記入力軸1に伝達された動力は、上記トロイダル型無段変速機26を構成する油圧式の押圧装置23aから入力側ディスク2に伝達され、更にパワーローラ6を介して出力側ディスク5aに伝達される。これら両ディスク2、5aのうち、入力側ディスク2の回転速度は入力側回転センサ62により、出力側ディスク5aの回転速度は出力側回転センサ63により、それぞれ測定して、制御器64に入力し、上記両ディスク2、5a間の(トロイダル型無段変速機26の)変速比を算出自在としている。又、上記入力軸1に伝達された動力は、直接又は上記トロイダル型無段変速機26を介して、差動ユニットである遊星歯車式変速機27aに伝達される。そして、この遊星歯車式変速機27aの構成部材の差動成分が、クラッチ装置65を介して、上記出力軸39aに取り出される。尚、このクラッチ装置65は、上記図11に示した低速用クラッチ41a及び高速用クラッチ42aを表すものである。又、出力軸回転センサ66により、上記出力軸39aの回転速度を検出自在としている。
【0057】
一方、前記ダンパ61部分から取り出した動力によりオイルポンプ67を駆動し、このオイルポンプ67から吐出した圧油を、上記押圧装置23aと、上記パワーローラ6を支持したトラニオン7を変位させるアクチュエータ10(例えば図15参照)の変位量を制御する為の制御弁装置68とに、送り込み自在としている。尚、この制御弁装置68とは、前述の図15に示した制御弁12と、差圧シリンダ54と、補正用制御弁56と、後述する図4に記載した、高速用切換弁69及び低速用切換弁70とを合わせたものである。又、上記アクチュエータ10に設けた1対の油圧室24a、24b(図4、7、15参照)内の油圧を(実際には1対の)油圧センサ53により検出して、その検出信号を、上記制御器64に入力している。この制御器64は、上記油圧センサ53からの信号に基づいて、上記トロイダル型無段変速機26の通過トルクを算出する。
【0058】
又、上記制御弁装置68は、ステッピングモータ13と、ライン圧制御用電磁開閉弁71と、上記補正用制御弁56を切り換える為の電磁弁57a(57b)と、上記高速用切換弁69及び低速用切換弁70を切り換える為のシフト用電磁弁72とにより、その作動状態を切り換えられる。そして、これらステッピングモータ13と、ライン圧制御用電磁開閉弁71と、電磁弁57a(57b)と、シフト用電磁弁72とは、何れも上記制御器64からの制御信号に基づいて切り換えられる。
【0059】
又、この制御器64には、前記各回転センサ62、63、66からの信号の他、油温センサ73の検出信号と、ポジションスイッチ74の位置信号と、アクセルセンサ75の検出信号と、ブレーキスイッチ76の信号とを入力している。このうちの油温センサ73は、無段変速装置を納めたケーシング内の潤滑油(トラクションオイル)の温度を検出するものである。又、上記ポジションスイッチ74は、後述する図4に記載した手動油圧切換弁77を切り換える為に運転席に設けられたシフトレバーの操作位置を表す信号を出す為のものである。又、上記アクセルセンサ75は、アクセルペダルの開度を検出する為のものである。更に、上記ブレーキスイッチ76は、ブレーキペダルが踏まれた事、或はパーキングブレーキが操作された事を検出して、その事を表す信号を発するものである。
【0060】
上記制御器64は、上記各スイッチ74、76及びセンサ62、63、66、73、75からの信号に基づいて、上記ステッピングモータ13と、ライン圧制御用電磁開閉弁71と、電磁弁57a(57b)と、シフト用電磁弁72とに上記制御信号を送る他、前記エンジン60を制御する為のエンジンコントローラ78に制御信号を送る。そして、前述した先発明の場合と同様にして、入力軸1と出力軸39aとの間の速度比を変えたり、或は停止時若しくは極低速走行時に前記トロイダル型無段変速機26を通過するトルクを制御する。
【0061】
又、本例の無段変速装置の場合には、前記出力軸回転センサ66、上記ポジションスイッチ74、上記アクセルセンサ75からの信号に基づいて、車両が停止若しくは極低速走行時に、前記押圧装置23aが発生する押圧力を、通常走行時に発生する押圧力に比べて小さくする。即ち、上記ポジションスイッチ74からの信号に基づき、上記シフトレバーが前進位置(Dレンジ又はLレンジ)か後退位置(Rレンジ)に位置し、車速が0若しくは極低速(例えば1km/h以下)であり、しかも上記アクセルセンサ75からの信号により、運転者がアクセルペダルを踏み込んでいないと判断される場合に、上記押圧装置23aに導入する油圧を下げる。この結果、前記入力側ディスク2を前記出力側ディスク5aに押圧する力が低くなり、これら両ディスク2、5aの内側面と前記パワーローラ6の周面との転がり接触部、即ち、トラクション部の面圧(∝法線力Fc )が下がる。そして、このトラクション部のトラクション係数μt が高くなる。
【0062】
非特許文献1の第13頁に記載されている様に、上記トラクション係数μt は、上記トラクション部の法線力Fc に対する接線力Ft の比として定義されるものである(μt =Ft /Fc )。この様なトラクション係数μt の大小は、非特許文献1の第14頁に記載されている図2.9、並びに非特許文献2の第8頁の図7に記載されている様に、上記トラクション部での滑り率(=クリープ率=トラクション部の周速uに対する滑り量△uの比=△u/u)に影響する。例えば、図2は、上記非特許文献2の第8頁に図7として記載されている、トラクション係数μt (縦軸)とクリープ率(横軸)との関係を示している。尚、この図2に記載したθ0 とは、パワーローラ6の揺動中心軸とこのパワーローラ6の直径方向反対側2個所位置に存在するトラクション部の中心とを結ぶ直線同士の交差角度の1/2として定義される、半頂角である。上記トラクション係数μt とクリープ率との関係は、半頂角の相違により異なるが、何れの場合でも、実際にトロイダル型無段変速機で利用される、クリープ率が低い範囲(図2で、各曲線の頂点よりも左側部分)では、トラクション係数μt が高くなる程クリープ率△u/uが高くなる。
【0063】
従って、前述した様に、車速が0若しくは極低速の際に前記押圧装置23aが発生する押圧力を小さくし、上記トラクション部のトラクション係数μt を高くする事は、このトラクション部のクリープ率(滑り率)が高くなる事に繋がる。この為、外乱により前記トロイダル型無段変速機26の変速比が多少変動した場合でも、このトロイダル型無段変速機26を通過するトルクの変動を小さく抑えられる。即ち、図3に実線a及び破線bで示す様に、トラクション部でのクリープ率が高くなる(滑り量が多くなる)程、前記出力軸39aに伝わるトルク(トロイダル型無段変速機26を通過するトルク)は高くなる。前記押圧装置23aが発生する押圧力が高く、上記トラクション部のトラクション係数μt が低い場合(例えば図2のb点で運転する場合)には、図3に破線bで示す様に、トロイダル型無段変速機を通過するトルクの変動が大きくなる。これに対して、上記押圧装置23aが発生する押圧力が低く、上記トラクション部のトラクション係数μt が高い場合(例えば図2のa点で運転する場合)には、図3に実線aで示す様に、トロイダル型無段変速機を通過するトルクの変動が小さくなる。即ち、押圧力を小さくする事で、クリープ率の変動に対する通過トルクの変動を緩やかにして、外乱等に基づくクリープ力の変動を小さく抑えられる。
【0064】
この結果、車両を停止若しくは極低速で走行させる際に、外乱により上記トロイダル型無段変速機26の変速比が多少変動した場合でも、ブレーキペダルを踏み込む為に要する踏力の変動を低く抑えられる。そして、運転者に違和感を与えたり、運転者が疲労する事を防止できる。又、上記押圧装置23aに供給する油圧を低く抑える事で、給油ポンプの駆動トルクを低減し、燃費改善にも寄与できる。
これに対して、車両を通常走行させる際には、上記押圧装置23aが発生する押圧力が十分に大きくなる。この状態では、上記トラクション部のクリープ量が少なくなり、このトラクション部での伝達効率を確保できる。
要するに本例の無段変速機は、通常走行時には上記押圧装置23aが発生する押圧力を十分に大きくして、上記トラクション部のトラクション係数及びクリープ率を図2のb点の状態で運転し、伝達効率を確保する。これに対して、車両を停止若しくは極低速で走行させる際には、上記押圧装置23aが発生する押圧力を小さくして、上記トラクション部のトラクション係数及びクリープ率を図2のa点の状態で運転し、出力軸39aのトルクの変動を抑える。
【0065】
更に本例の無段変速装置の場合には、前記出力軸回転センサ66、前記ポジションスイッチ74、前記ブレーキスイッチ76からの信号に基づいて、上記トロイダル型無段変速機26の通過トルクの目標値(前述の図13の縦軸に関する、同図のa点の位置)を変える。即ち、上記ポジションスイッチ74からの信号に基づき、前記シフトレバーが前進位置(Dレンジ又はLレンジ)か後退位置(Rレンジ)に切り換えられている場合で、車速が0若しくは極低速(例えば1km/h以下)であり、ブレーキペダルが踏まれるか、或はパーキングブレーキが作動状態にある場合に、上記通過トルクの目標値を下げる(図13のa点を縦軸の下方にずらせる)。この結果、上記出力軸39aに加わるトルクは低くなり、車両が不用意に発進する事はなくなる。又、ブレーキペダルを踏んだ状態で車両を停止させる場合にも、踏力が小さくて済み、運転者の疲労を抑えられる。更に、前記エンジン60の出力トルクを抑えられる分、このエンジン60が消費する燃料を少なくして、省資源化を図れる。
【0066】
これに対して、上記シフトレバーが前進位置(Dレンジ又はLレンジ)か後退位置(Rレンジ)に位置する場合で、車速が0若しくは極低速(例えば1km/h以下)であっても、ブレーキペダルが踏まれず、しかもパーキングブレーキが非作動状態の場合には、上記通過トルクの目標値を比較的高く設定する。この結果、運転者が発進動作を行なえば、車両をもたつきなく発進させる事ができる。特に、登り坂で発進をする場合にアクセルペダルの操作が多少遅れても、車両を後退させずに発進させる事ができる。又、車両の走行速度が極低速でない限り(例えば1km/hを越える限り)、アクセルペダルを踏まずにブレーキペダルを操作するのみで、車両を低速走行させる事が可能になる。この結果、車庫入れや縦列駐車を容易に行なえる。尚、本例の場合、上記シフトレバーが非走行状態、即ち、パーキング位置(Pレンジ)かニュートラル位置(Nレンジ)に位置する場合には、前記クラッチ装置65(低速用、高速用両クラッチ41a、42a)の接続を断ち、上記出力軸39aに駆動力が伝わる事を防止する。この場合には、前記エンジンコントローラ78が上記エンジン60を、可及的に低トルクで、アイドリング回転させる。
【0067】
次に、上述の様な本発明の無段装置の制御に好適な制御回路に就いて、図4により簡単に説明する。尚、制御弁12と、ステッピングモータ13と、プリセスカム18と、リンク腕19と、差圧シリンダ54とにより、アクチュエータ10のストロークを制御し、トロイダル型無段変速機の変速比を調節する部分の構造に就いては、前述の図15に示した先発明に係る構造と同じであるから、重複する説明を省略する。
【0068】
図4に示した油圧回路では、油溜79から吸引されてオイルポンプ67a、67bにより吐出された圧油を、ライン圧制御用電磁弁調圧弁80a、80bにより所定圧に調整自在としている。上記オイルポンプ67a、67bが、上述した図1に記載したオイルポンプ67に相当する。又、上記両調圧弁80a、80bのうち、次述する手動油圧切換弁77側に送る油圧を調整する為の調圧弁80aによる調整圧を、ライン圧制御用電磁開閉弁71の開閉に基づいて調節自在としている。そして、上記両調圧弁80a、80bにより圧力を調整された圧油を、上記制御弁12を介して上記アクチュエータ10に送り込み自在とする他、上記差圧シリンダ54のストロークを調節する為の補正用制御弁56に、電磁弁57a、57bの開閉に基づいて送り込み自在としている。
【0069】
又、上記圧油を、前記油圧式の押圧装置23aに送り込む様にしている。又、この圧油は、手動油圧切換弁77と、高速用切換弁69又は低速用切換弁70とを介して、低速用クラッチ41(41a)又は高速用クラッチ42(42a)の油圧室内に送り込み自在としている。上記各切換弁77、69、70のうち、上記手動油圧切換弁77は、運転席に設けられて運転者により操作される操作レバー(シフトレバー)により操作されて、駐車レンジ(P)、リバース(後退)レンジ(R)、ニュートラルレンジ(N)、ドライブ(通常前進)レンジ(D)、高駆動力前進レンジ(L)を選択する。これら各レンジを選択した場合に於ける、上記手動油圧切換弁77の切り換え状態は、図示の通りである。尚、この手動油圧切換弁77を含め、各弁の構造及び機能の表示は、油圧機器に関する機械製図の一般的な手法によっている。
【0070】
又、上記高速用、低速用両切換弁69、70はそれぞれ、シフト用電磁弁72により切り換えられるシフト用切換弁81の切り換えに基づく圧油の給排により、それぞれの連通状態を切り換えられるもので、一方の切換弁69(又は70)が高速用クラッチ42(又は低速用クラッチ41)の油圧室に圧油を送り込む際には、他方の切換弁70(又は69)が低速用クラッチ41(又は高速用クラッチ42)の油圧室から圧油を排出する。
【0071】
上述の様に構成する油圧回路を備えた無段変速装置は、前述の図10に示した従来から知られている、或は図11に示した先発明に係る無段変速装置と同様に、入力軸1と、出力軸39、39aと、トロイダル型無段変速機26と、差動ユニットである遊星歯車式変速機27、27aと、切換手段と、制御器と、操作レバーとを備える。このうちの切換手段は、低速用クラッチ41、41a及び高速用クラッチ42、42aから成り、低速モードと高速モードとを切り換えるものである。又、図1に示した制御器64が、上記切換手段を構成する上記低速用、高速用各クラッチ41、41a、42、42aの断接及び上記トロイダル型無段変速機26の変速比の変更を制御する。又、上記操作レバーは、運転席に設けられ、運転者の操作に基づいて、前記手動油圧切換弁77を切り換え自在としている。
【0072】
特に、本例の無段変速装置の場合には、上記制御器は、次の(1) 〜(6) の機能を有する。
(1) 低速モード時、即ち、上記低速用クラッチ41、41aを接続し、上記高速用クラッチ42、42aの接続を断った状態での運転時に、上記トロイダル型無段変速機26の変速比を調節して上記遊星歯車式変速機27、27aを構成する複数の歯車の相対的変位速度を変化させると共に、駆動源であるエンジン60により入力軸1を一方向に回転させた状態のまま、出力軸39、39aの回転状態を、停止状態を挟んで正転及び逆転に変換自在とする機能(請求項1の▲1▼の機能)。
この機能に関しては、前述の図10に示した従来から知られている、或は図11に示した先発明に係る無段変速装置と同様である。
【0073】
(2) 高速モード時、即ち、上記低速用クラッチ41、41aの接続を断ち、上記高速用クラッチ42、42aを接続した状態での運転時に、上記トロイダル型無段変速機26の変速比を変える事により、上記入力軸1と上記出力軸39、39aとの間の変速比を変更する機能。
この機能に関しても、前述の図10に示した従来から知られている、或は図11に示した先発明に係る無段変速装置と同様である。
【0074】
(3) 低速モード時、即ち、上記低速用クラッチ41、41aを接続し、上記高速用クラッチ42、42aの接続を断った状態での運転時に、上記トロイダル型無段変速機26の変速比を変える事により、このトロイダル型無段変速機26を通過するトルクを調節する機能(請求項2の機能)。
この機能に関しては、前述の図13〜15により説明した、先発明の場合と同様である。
【0075】
(4) 上記操作レバーにより非走行状態、即ち、パーキングレンジ又はニュートラルレンジが選択された状態で、上記低速用クラッチ41、41a及び上記高速用クラッチ42、42aの接続を総て断つ機能。
【0076】
(5) 車両が停止若しくは極低速走行時に前記押圧装置23aが発生する押圧力を、通常走行時に発生する押圧力に比べて小さくする機能(請求項1の▲2▼の機能)。
この機能が、本発明の特徴であるが、この機能に就いては、図1〜3を使用して先に詳しく説明した通りである。
【0077】
(6) 車両が停止若しくは極低速走行時で、この車両を停止させる為に使用する制動手段が操作された場合に、上記トロイダル型無段変速機26を通過するトルクを、この制動手段が操作されていない場合に比べて低くする機能。
この機能も、前述した通りである。
尚、図示の例では、上記無段変速装置の速度比を無限大近傍に規制すべく、前記トロイダル型無段変速機26の変速比を微調節する為の差圧シリンダ54のストロークを小さな範囲に抑えて、この変速比が過度に調節されない様にしている。又、上記差圧シリンダ54を、前記アクチュエータ10の油圧室24a、24b内の差圧により切り換える様にしている。従って、上記変速比を微調節する為の構造部分を故障しにくくして、信頼性の高い無段変速装置を実現できる。
【0078】
【発明の効果】
本発明は、以上に述べた通り構成され作用するので、車両の停止時若しくは極低速走行時に、出力軸に伝達される駆動トルクの変動を小さく抑える事ができる。この為、車両を停止状態若しくは極低速状態に維持する為の要する制動力を小さく抑えて運転者の疲労低減を図ると共に、その状態での燃料消費を抑える事ができて、無限大の変速比を得られる無段変速装置の実現に寄与できる。
【図面の簡単な説明】
【図1】本発明の実施の形態の第1例を示す、無段変速装置の変速制御装置のブロック図。
【図2】トラクション係数とクリープ率との関係を示す線図。
【図3】トロイダル型無段変速機を通過するトルクとトラクション部のクリープ率との関係を示す線図。
【図4】無段変速装置に組み込むトロイダル型無段変速機の変速比を調節する為の機構を示す油圧回路図。
【図5】従来から知られているトロイダル型無段変速機の第1例を示す断面図。
【図6】図5のA−A断面図。
【図7】同B−B断面図。
【図8】従来から知られているトロイダル型無段変速機の第2例を示す断面図。
【図9】同第3例を示す断面図。
【図10】従来から知られている無段変速装置の1例を示す略断面図。
【図11】先発明に係る制御装置により変速比を制御する無段変速装置の1例を示す略断面図。
【図12】この無段変速装置に組み込んだトロイダル型無段変速機(CVU)の変速比と、この無段変速装置(T/M)全体としての変速比との関係を示す線図。
【図13】先発明に係る制御装置で変速比を制御する状態を説明する為、エンジンの回転速度とトルクとの関係を示す線図。
【図14】トロイダル型無段変速機を通過するトルク及び変速比と、無段変速装置全体としての変速比との関係を示す線図。
【図15】先発明の無段変速装置を構成するトロイダル型無段変速機の変速比を調節する為の機構を示す油圧回路図。
【符号の説明】
1 入力軸
2 入力側ディスク
3 ボールスプライン
4 出力歯車
5、5a 出力側ディスク
6 パワーローラ
7 トラニオン
8 支持軸
9 枢軸
10 アクチュエータ
11 支持板
12 制御弁
13 ステッピングモータ
14 スリーブ
15 スプール
16 ピストン
17 ロッド
18 プリセスカム
19 リンク腕
20 同期ケーブル
21 カム面
22 駆動軸
23、23a、23b 押圧装置
24a、24b 油圧室
25 発進クラッチ
26 トロイダル型無段変速機
27、27a 遊星歯車式変速機
28、28a キャリア
29a、29b 遊星歯車素子
30 第一の伝達軸
31a、31b 太陽歯車
32 第二の伝達軸
33、33a 中空回転軸
34 太陽歯車
35 遊星歯車素子
36 リング歯車
37、37a 第二のキャリア
38a、38b 遊星歯車素子
39、39a 出力軸
40、40a 第二のリング歯車
41、41a 低速用クラッチ
42、42a 高速用クラッチ
43 第一の遊星歯車
44 第二の遊星歯車
45a、45b 遊星歯車素子
46a、46b 遊星歯車素子
47 伝達軸
48 第一の太陽歯車
49 第二の太陽歯車
50 リング歯車
51 第三の太陽歯車
52a、52b 遊星歯車素子
53 油圧センサ
54 差圧シリンダ
55a、55b 油圧室
56 補正用制御弁
57a、57b 電磁弁
58 スプール
59 スプール
60 エンジン
61 ダンパ
62 入力側回転センサ
63 出力側回転センサ
64 制御器
65 クラッチ装置
66 出力軸回転センサ
67、67a、67b オイルポンプ
68 制御弁装置
69 高速用切換弁
70 低速用切換弁
71 ライン圧制御用電磁弁
72 シフト用電磁弁
73 油温センサ
74 ポジションスイッチ
75 アクセルセンサ
76 ブレーキスイッチ
77 手動油圧切換弁
78 エンジンコントローラ
79 油溜
80a、80b 調圧弁
81 シフト用切換弁
82 ロッド
83 リンク腕
Claims (3)
- 入力軸と、出力軸と、トロイダル型無段変速機と、複数の歯車を組み合わせて成る歯車式の差動ユニットと、このトロイダル型無段変速機の変速比の変更を制御する為の制御器とを備え、
このトロイダル型無段変速機は、上記差動ユニットの第一の入力部と共に上記入力軸により回転駆動される入力側ディスクと、この入力側ディスクと同心に、且つ、この入力側ディスクに対する相対回転を自在として支持され、上記差動ユニットの第二の入力部に接続された出力側ディスクと、これら両ディスク同士の間に挟持された複数個のパワーローラと、これら両ディスクを互いに近づけ合う方向に押圧する油圧式の押圧装置とを備えたものであり、
上記差動ユニットは、上記第一、第二の入力部同士の間の速度差に応じた回転を取り出して上記出力軸に伝達するものであり、
上記制御器は、次の▲1▼▲2▼の機能を有するものである無段変速装置。
▲1▼ 上記トロイダル型無段変速機の変速比を調節して上記差動ユニットを構成する複数の歯車の相対的変位速度を変化させる事により、上記入力軸を一方向に回転させた状態のまま上記出力軸の回転状態を、停止状態を挟んで正転及び逆転に変換自在とする機能。
▲2▼ 車両が停止若しくは極低速走行時に上記押圧装置が発生する押圧力を、通常走行時に発生する押圧力に比べて小さくする機能。 - 制御器が、車両が停止若しくは極低速走行時に、トロイダル型無段変速機の変速比を変える事により、このトロイダル型無段変速機を通過するトルクを調節する機能を有する、請求項1に記載した無段変速装置。
- 制御器の▲2▼の機能は、入力軸を回転させたまま出力軸を停止させる状態時にのみ、押圧装置が発生する押圧力を、他の状態の場合に比べて小さくするものである、請求項1〜2の何れかに記載した無段変速装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003001105A JP4078981B2 (ja) | 2003-01-07 | 2003-01-07 | 無段変速装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003001105A JP4078981B2 (ja) | 2003-01-07 | 2003-01-07 | 無段変速装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2004211836A JP2004211836A (ja) | 2004-07-29 |
| JP2004211836A5 JP2004211836A5 (ja) | 2005-10-27 |
| JP4078981B2 true JP4078981B2 (ja) | 2008-04-23 |
Family
ID=32819215
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003001105A Expired - Fee Related JP4078981B2 (ja) | 2003-01-07 | 2003-01-07 | 無段変速装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4078981B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007315507A (ja) | 2006-05-26 | 2007-12-06 | Nsk Ltd | 無段変速装置 |
| JP5176496B2 (ja) * | 2007-11-13 | 2013-04-03 | 日本精工株式会社 | トロイダル型無段変速機 |
-
2003
- 2003-01-07 JP JP2003001105A patent/JP4078981B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2004211836A (ja) | 2004-07-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4370842B2 (ja) | 無段変速装置 | |
| JP4378991B2 (ja) | 無段変速装置 | |
| JP6926379B2 (ja) | 連続可変変速機 | |
| JP2004245326A (ja) | 無段変速装置 | |
| US7303503B2 (en) | Toroidal-type continuously variable transmission | |
| JP4168785B2 (ja) | 無段変速装置用トロイダル型無段変速ユニットの変速比の制御方法及び装置 | |
| JP2003194207A (ja) | トロイダル型無段変速装置 | |
| WO2001021981A2 (en) | Dual strategy control for a toroidal drive type continuously variable transmission | |
| KR19990023711A (ko) | 토로이달식 무단변속기의 제어장치 | |
| JP2004169719A (ja) | トロイダル型無段変速機及び無段変速装置 | |
| JP4066920B2 (ja) | トロイダル型無段変速機用試験装置 | |
| JP4078981B2 (ja) | 無段変速装置 | |
| JP3960182B2 (ja) | 無段変速装置 | |
| JP4010222B2 (ja) | 無段変速装置 | |
| JP4529442B2 (ja) | トロイダル型無段変速機 | |
| JP2003194208A (ja) | トロイダル型無段変速機及び無段変速装置 | |
| JP4599905B2 (ja) | 無段変速装置 | |
| JP2004076940A (ja) | トロイダル型無段変速機 | |
| JP4273927B2 (ja) | 無段変速装置 | |
| JP2004197934A (ja) | 無段変速装置 | |
| JP4696472B2 (ja) | 無段変速装置 | |
| JP4192495B2 (ja) | 無段変速装置 | |
| JP4379065B2 (ja) | 無段変速装置 | |
| JP4285195B2 (ja) | 無段変速装置 | |
| JP4016745B2 (ja) | 無段変速装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050729 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050729 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20060713 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20070828 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070904 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20080115 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080128 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110215 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120215 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130215 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130215 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140215 Year of fee payment: 6 |
|
| LAPS | Cancellation because of no payment of annual fees |