JP4066577B2 - 半導体加速度センサ - Google Patents
半導体加速度センサ Download PDFInfo
- Publication number
- JP4066577B2 JP4066577B2 JP30475199A JP30475199A JP4066577B2 JP 4066577 B2 JP4066577 B2 JP 4066577B2 JP 30475199 A JP30475199 A JP 30475199A JP 30475199 A JP30475199 A JP 30475199A JP 4066577 B2 JP4066577 B2 JP 4066577B2
- Authority
- JP
- Japan
- Prior art keywords
- piezoresistor
- acceleration sensor
- flexure
- bending
- semiconductor acceleration
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images









Landscapes
- Pressure Sensors (AREA)
Description
【発明の属する技術分野】
本発明は、ピエゾ抵抗の変化により加速度を検出する半導体加速度センサに関するものである。
【0002】
【従来の技術】
半導体加速度センサを図7乃至図10の従来例にもとづき説明する。図7は半導体加速度センサの断面図であり、図8は半導体加速度センサの上面図で、特に半導体加速度センサの本体部となるチップ部1の上面構造を示すものである。チップ部1には、重り部5と撓み部4が形成されている。重り部5は、加速度検出のための質量体であり、撓み部4により支持されている。ここで、撓み部4とチップ部1の重り部5周辺部(フレーム)との境界を支持部と称する。これらは、チップ部1下面からアルカリ異方性エッチングにより、撓み部4の肉薄形状の形成するとともに、重り部5周辺を貫通させてコの字に近いスリット10を形成することで形成される。重り部5は異方性エッチングで形成されるため、その断面形状は台形となる(図中重り部底面19を破線で示す)。また、撓み部4上にはピエゾ抵抗6が形成され、従来例では、撓み部4が2本互いに平行に形成され、各撓み部4には各々2個、合計4個のピエゾ抵抗6が形成されている。この4個のピエゾ抵抗6の配置構成を図9に撓み部4を拡大して示し、また、ピエゾ抵抗6の配線回路を図10に示す。図7における上部ガラスストッパ2及び下部ガラスストッパ3は、チップ部1上面,下面に各々陽極接合により接合され、過大な加速度が生じたとき、重り部5の変位を制限し撓み部4の破壊を防止する役目を備えている。
【0003】
以上が基本構成であるが、他の構成要素についても製造過程を交えながら簡単に述べる。結晶面(100)のシリコン単結晶ウェハ(チップ部1)を酸化して酸化膜を形成した後、後工程で重り部5及び撓み部4を形成する領域の酸化膜だけを、フォトリソグラフィ技術によりコの字型に近い形状で除去する(酸化膜8)。次に酸化膜8をエッチングマスクとしてシリコンウェハのエッチングを行う。エッチングの深さは、一般に6μmから30μm程度である。再度酸化を行い、後工程で形成されるアルミニウム配線13とピエゾ抵抗6との接続を行うためのP+(ボロン)拡散層配線11を形成する。続いて、イオン注入によりピエゾ抵抗6を撓み部4にブリッジ回路を形成するように組み合わせて形成する。そして、ピエゾ抵抗6に接続されたP+拡散層配線11とアルミニウム配線13とをコンタクト部12で接続する。アルミニウム配線13をワイヤボンディング用のパッド14に接続し、さらにこのパッド14と電源供給用及び電気信号出力用の外部端子とをワイヤ15でボンディング接続する。次にアルミニウム配線13の保護膜として、窒化膜9でパッシベーション(半導体表面の電気的特性の安定化,外部雰囲気の影響からの保護)する。続いて、上部ガラスストッパー2とチップ1とを接合するアルミ薄膜7を形成し、この保護膜として窒化膜(図示せず)をパッシベーションする。そしてチップ1下面からアルカリ異方性エッチングにより撓み部4を薄くするとともに、重り部5周辺部を貫通させ、コの字型に近い形状のスリット10を形成する。次にアルミニウム配線13、パッド14、アルミ薄膜7上の窒化膜(図示せず)を除去する。こうしてできた重り部5と撓み部4の上下に上部ガラスストッパー2、下部ガラスストッパー3を陽極接合してエアーダンピング構造を形成して、過度の加速度が加わることによる撓み部4の破壊(折れ)を防止する。上部ガラスストッパー2、下部ガラスストッパー3の凹部には、その凹部の深さより小さい高さの突起20を形成し、重り部5の振れ幅を制御して半導体加速度センサの周波数特性を制御する。以上半導体加速度センサの各構成要素について説明した。
【0004】
次に加速度検出の動作について説明する。加速度αがチップ部1の垂直方向に加わると重り部5に力F=mα(m:質量)が発生し、重り部5が変位する。この力Fにより撓み部4が撓んで表面に歪みが発生し、この歪みによりピエゾ抵抗6の抵抗値が変化する。ピエゾ抵抗6は、第1の撓み部4にR1とR4、第2の撓み部にR2とR3として設けられるとともに、図10に示すようなブリッジ回路を構成するように配線されている。ここで、端子p1と端子p4には定電圧電源が接続され、ピエゾ抵抗6(R1からR4)の抵抗値変化が端子p2と端子p3間の電圧変化として出力される。このように加速度αは、ピエゾ抵抗6の抵抗値変化として検出され、電圧変化による電気信号として出力される。
【0005】
【発明が解決しようとする課題】
半導体加速度センサの感度は下式で与えられる。下式より半導体加速度センサの感度を向上させるさせるためには、重り部5を重くする、撓み部4の厚さを薄くする、撓み部4の幅を狭くするなどが考えられる。
【0006】
【数1】

しかしながら、重り部5を重くすることは、重り部5を大きくすることにつながり、これはチップ部1を大きくすることになり小型化に不適である。また、撓み部4の薄くすることについては、厚みをおよそ10μm以下にまですると、振動や衝撃により製造工程中に折れ易く収率が悪くなるという問題があった。さらに、撓み部4の幅を狭くすることについては、ピエゾ抵抗6の大きさ(長さ,幅)を小さくし、幅を狭くすることが考えられるが、感度を低下させることなくピエゾ抵抗6を小型形成することには限界がある。
【0008】
本発明は、上記事由に鑑みてなしたもので、その目的とするところは、感度の高い半導体加速度センサを提供することにある。
【0009】
【課題を解決するための手段】
上記目的を達成するために、請求項1記載の発明は、加速時に変位する重り部と、該重り部に連結された撓み部と、該撓み部を支持する支持部と、該撓み部に前記重り部の変位により前記撓み部に生じる歪みを検出するピエゾ抵抗を有して、該ピエゾ抵抗の抵抗変化をもとに加速度を検知する半導体加速度センサにおいて、前記撓み部を複数本の平行な撓み部で構成し、その内の2本の各撓み部には2個のピエゾ抵抗を形成し、第1のピエゾ抵抗を撓み部の長手方向に対し平行かつ撓み部の長手方向中心線上に配置し、第2のピエゾ抵抗を撓み部の長手方向に対し直交かつ第1のピエゾ抵抗の延長線上に配置すると共に、第1の撓み部の第2のピエゾ抵抗を支持部側の端部に配置し、第2の撓み部の第2のピエゾ抵抗を重り部側の端部に配置したことを特徴とするものである。
【0013】
【発明の実施の形態】
以下、本発明の実施の形態に係る半導体加速度センサについて図3及び図11にもとづき説明する。
【0014】
図1は本発明の第1の参考の形態の半導体加速度センサを示す上面図で、特に半導体加速度センサの本体部となるチップ部1の上面構造を示すものである。基本構成は従来の実施例と同様で、チップ部1には、重り部5と撓み部4が形成されている。重り部5は、加速度検出のための質量体であり、撓み部4により支持されている。また、撓み部4上にはピエゾ抵抗6が形成され、撓み部4が2本互いに平行に形成され、各撓み部4には各々2個、合計4個のピエゾ抵抗6が形成されている。ピエゾ抵抗6は、第1の撓み部4にR1とR4、第2の撓み部にR2とR3として設けられるとともに、図10に示すようなブリッジ回路を構成するように配線されている。
【0015】
また、加速度検出の動作についても基本は従来例と同様である。加速度αがチップ部1の垂直方向に加わると重り部5に力F=mα(m:質量)が発生し、重り部5が変位する。この力Fにより撓み部4が撓み、表面に歪みが発生し、この歪みによりピエゾ抵抗6の抵抗値が変化し、この抵抗値変化が図10のブリッジ回路の端子p2,端子p3間の電圧変化として出力される。このように加速度αは、ピエゾ抵抗6の抵抗値変化として検出され、電圧変化による電気信号として出力される。
【0016】
ここで、図11に解析結果にもとづく撓み部4に加わる応力の集中の特性概略図を示す。撓み部4の両端部の内側近傍に応力が集中していることがわかる。すなわちピエゾ抵抗6をこの部位に配置すれば、撓み部4の撓みをより大きな抵抗値変化として検出することができる。
【0017】
ここで第1の撓み部4において、第1のピエゾ抵抗6(R4)を撓み部4の長手方向に対し平行かつ撓み部4の長手方向中心線上に配置し、第2のピエゾ抵抗(R1)を撓み部4の長手方向に対し直交かつ撓み部4の長手方向中心線上かつ、撓み部4の支持部側の端部(上述の応力集中部位)に配置するようにする。同様に第2の撓み部4において、第1のピエゾ抵抗6(R3)を撓み部4の長手方向に対し平行かつ撓み部4の長手方向中心線上に配置し、第2のピエゾ抵抗(R2)を撓み部4の長手方向に対し直交かつ撓み部4の長手方向中心線上かつ、撓み部4の支持部側の端部(上述の応力集中部位)に配置するようにする。
【0018】
このように配置することで、重り部5が上方に変位した場合、ピエゾ抵抗6(R1)とピエゾ抵抗6(R2)には強い圧縮応力(ピエゾ抵抗6の線を横から圧縮する応力)が働き、反対に重り部5が下方に変位した場合、ピエゾ抵抗6(R1)とピエゾ抵6(R2)には強い引張り応力(ピエゾ抵抗6の線を横から引張る応力)が働く。このように加速度を高い感度で検知することができる。さらに、各撓み部4において、第1のピエゾ抵抗6(R4,R3)と第2のピエゾ抵抗6(R1,R2)とが、撓み部4の長手方向中心線上に配置されるため、ピエゾ抵抗6の配置に必要な幅が減少する。よって、撓み部4の幅を狭くすることができ、前記の感度の式より感度を向上させることができる。
【0019】
このように、ピエゾ抵抗6を配置することにより、先ず、撓み部4の応力集中箇所で重り部5の変位を検知するので、高い感度で加速度を検知することができるという効果を奏するとともに、ピエゾ抵抗6の配置に必要な幅が減少して撓み部4の幅を狭くすることができるので、さらに高い感度で加速度検知ができるという効果を奏する。
【0020】
図2は本発明の第2の参考の形態の半導体加速度センサを示す上面図で、特に半導体加速度センサの本体部となるチップ部1の上面構造を示すものである。基本構成及び加速度検出動作は第1の参考の形態と同様であるが、ここで各撓み部4において、第2のピエゾ抵抗(R1,R2)を撓み部4の重り部5側の端部(上述の応力集中部位)に配置するようにしたものである。図11に示したように撓み部4の応力集中が重り部5側の内側近傍にもあることから、第1の実施の形態と同様の効果を奏することができる。また、撓み部4の幅を狭くしより高い感度で加速度検知ができる効果も同様である。
【0021】
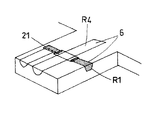
図3は本発明の第1の実施の形態の半導体加速度センサを示す上面図で、特に半導体加速度センサの本体部となるチップ部1の上面構造を示すものである。基本構成及び加速度検出動作は第1及び第2の実施の形態と同様であるが、ここで、第1の撓み部4において、第2のピエゾ抵抗(R1)を撓み部4の支持部側の端部(上述の応力集中部位)に配置し、第2の撓み部4において、第2のピエゾ抵抗(R2)を撓み部4の重り部5側の端部(上述の応力集中部位)に配置するようにしたものである。すなわち第2のピエゾ抵抗6が、第1の撓み部4では支持部側、第2の撓み部4では重り部5側に互いに反対の側に配置した構成である。図11に示したように撓み部4の応力集中が支持部側及び重り部5側の内側近傍にもあることから、第1の参考の形態と同様の効果を奏することができる。また、撓み部4の幅を狭くしより高い感度で加速度検知ができる効果も同様である。
【0022】
さらに本実施の形態の特有の動作について説明する。例えば、図3において、第2の撓み部4(R2,R3を有する)が第1の撓み部4(R1,R4を有する)に比べて大きく上方に変位した場合、すなわち捩れが発生した場合、圧縮応力はピエゾ抵抗6(R2)に大きく作用することになり、ピエゾ抵抗6(R2)とピエゾ抵抗6(R1)の抵抗値に差が生じる。この抵抗値の差により撓み部4の捩れを検出することができる。尚、ピエゾ抵抗6(R1)を重り部5側に、ピエゾ抵抗6(R2)を支持部側に入れ替えても同様の作用となる。このように第2のピエゾ抵抗6を、第1の撓み部4では支持部側、第2の撓み部4では重り部5側に互いに反対の側に配置するようにしたので、撓み部4の捩れを検出することができるという効果を奏する。
【0023】
図4は本発明の第3の参考の形態の半導体加速度センサを示す上面図で、特に半導体加速度センサの本体部となるチップ部1の上面構造を示すものである。基本構成及び加速度検出動作は第1及び第2の参考の形態と同様である。
【0024】
ここで第1の撓み部4において、第1のピエゾ抵抗6(R4)を撓み部4の長手方向に対し平行かつ撓み部4の長手方向中心線上に配置し、第2のピエゾ抵抗(R1)を撓み部4の長手方向に対し直交かつ撓み部4の長手方向中心線上かつ、第1のピエゾ抵抗6(R4)と重ねて(交差させて)配置する。第1のピエゾ抵抗6(R4)と第2のピエゾ抵抗(R1)は互いに絶縁された状態にある。同様に第2の撓み部4において、第1のピエゾ抵抗6(R3)を撓み部4の長手方向に対し平行かつ撓み部4の長手方向中心線上に配置し、第2のピエゾ抵抗(R2)を撓み部4の長手方向に対し直交かつ撓み部4の長手方向中心線上かつ、第1ピエゾ抵抗6(R3)と重ねて(交差させて)配置する。第1のピエゾ抵抗6(R3)と第2のピエゾ抵抗(R2)は互いに絶縁された状態にある。
【0025】
第1のピエゾ抵抗6と第2のピエゾ抵抗6の交差部の構成の一例を図5に示す。ここでは、第1の撓み部4において説明するが、第2の撓み部4についても同様である。ここでは、第2のピエゾ抵抗6(R1)のほぼ中央を分断し、この分断した部分に第1のピエゾ抵抗6(R4)を配置する。分断された第2のピエゾ抵抗6(R1)は、アルミスパッタリング(アルミブリッジ21)により接続する。尚、アルミスパッタリングを行う前に、交差部(第1のピエゾ抵抗6)の上部を酸化膜等の絶縁層で覆う必要がある。このように配置することによりピエゾ抵抗6の配置に必要な幅を減少させることができる。また、図11の撓み部4の応力集中特性を見ると、撓み部4中央部の応力は両端に比べ小さいが、比較的広範囲に安定していることがわかる。よってピエゾ抵抗6の形成位置のばらつきによる検知感度の変動が抑えられ、安定した応力検知を行うことができる。
【0026】
また、図示はしないが、第1のピエゾ抵抗が形成されたチップ(シリコンウェハ)の上に酸化膜をCVD等で積層し、この上にポリシリコン層を積層し、このポリシリコン層に第2のピエゾ抵抗を形成するような2層構造でもよい。
【0027】
このように、ピエゾ抵抗6の配置に必要な幅が減少して撓み部4の幅を狭くすることができるので、高い感度で加速度検知ができるという効果を奏する。また、第1のピエゾ抵抗6(R1,R2)が撓み部4の中央部に配置できるので、ピエゾ抵抗6の形成位置のばらつきの影響を受け難く、安定した応力検知を行うことができるという効果を奏する。
【0028】
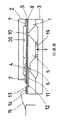
図6は本発明の第4の参考の形態の半導体加速度センサを示す上面図で、特に半導体加速度センサの本体部となるチップ部1の上面構造を示すものである。基本構成及び加速度検出動作は第1の参考の形態と同様であるが、ここでは撓み部4が3本であり、両側の2本の撓み部4に第1の参考の形態と同様ピエゾ抵抗6(R1,R2,R3,R4)を配置し、中央の撓み部4にはピエゾ抵抗6は配置しない構成である。加速度検出動作は、両側の2本の撓み部4及びピエゾ抵抗6で行われ、その動作及び効果は第1の参考の形態と同様である。中央の撓み部4’は、撓み部の折れ防止のための補強の役割を果たす。本参考の形態では、第1の参考の形態のピエゾ抵抗6の配置を用いているが、第1の実施の形態又は第2乃至第3の参考の形態のピエゾ抵抗6の配置でもよい。
【0029】
このように本発明は2本に限らず3本以上の複数本の撓み部を有する半導体加速度センサにも適用してもよい。なお、ピエゾ抵抗6を配置する撓み部4は、複数本の内特に限定するものではないが、両側の2本であることが望ましい。
【0030】
【発明の効果】
上述の如く、本発明の請求項1記載の発明によれば、加速時に変位する重り部と、該重り部に連結された撓み部と、該撓み部を支持する支持部と、該撓み部に前記重り部の変位により前記撓み部に生じる歪みを検出するピエゾ抵抗を有して、該ピエゾ抵抗の抵抗変化をもとに加速度を検知する半導体加速度センサにおいて、前記撓み部を複数本の平行な撓み部で構成し、その内の2本の各撓み部には2個のピエゾ抵抗を形成し、第1のピエゾ抵抗を撓み部の長手方向に対し平行かつ撓み部の長手方向中心線上に配置し、第2のピエゾ抵抗を撓み部の長手方向に対し直交かつ第1のピエゾ抵抗の延長線上に配置するようにしたので、撓み部4の幅を狭くし、高い感度の半導体加速度センサが提供できた。
また、第1の撓み部の第2のピエゾ抵抗を支持部側の端部に配置し、第2の撓み部の第2のピエゾ抵抗を重り部側の端部に配置したので、撓み部の応力の高い部位で加速度を検知し、さらに感度を向上させることができると共に、撓み部の捩れを検出することができる。
【図面の簡単な説明】
【図1】本発明の第1の実施の形態の半導体加速度センサを示す上面図である。
【図2】本発明の第2の実施の形態の半導体加速度センサを示す上面図である。
【図3】本発明の第3の実施の形態の半導体加速度センサを示す上面図である。
【図4】本発明の第4の実施の形態の半導体加速度センサを示す上面図である。
【図5】本発明の第4の実施の形態の半導体加速度センサにおける撓み部のピエゾ抵抗構成を示す図である。
【図6】本発明の第5の実施の形態の半導体加速度センサを示す上面図である。
【図7】従来の半導体加速度センサの断面図である。
【図8】従来の半導体加速度センサの上面図である。
【図9】従来の半導体加速度センサのピエゾ抵抗の配置構成図である。
【図10】半導体加速度センサのピエゾ抵抗の配線図である。
【図11】半導体加速度センサの撓み部の応力集中特性の概略図である。
【符号の説明】
1 半導体加速度センサ(チップ部)
4 撓み部
5 重り部
6 ピエゾ抵抗
R1 ピエゾ抵抗
R2 ピエゾ抵抗
R3 ピエゾ抵抗
R4 ピエゾ抵抗
Claims (1)
- 加速時に変位する重り部と、該重り部に連結された撓み部と、該撓み部を支持する支持部と、該撓み部に前記重り部の変位により前記撓み部に生じる歪みを検出するピエゾ抵抗を有して、該ピエゾ抵抗の抵抗変化をもとに加速度を検知する半導体加速度センサにおいて、
前記撓み部を複数本の平行な撓み部で構成し、その内の2本の各撓み部には2個のピエゾ抵抗を形成し、
第1のピエゾ抵抗を撓み部の長手方向に対し平行かつ撓み部の長手方向中心線上に配置し、
第2のピエゾ抵抗を撓み部の長手方向に対し直交かつ第1のピエゾ抵抗の延長線上に配置すると共に、第1の撓み部の第2のピエゾ抵抗を支持部側の端部に配置し、第2の撓み部の第2のピエゾ抵抗を重り部側の端部に配置したことを特徴とする半導体加速度センサ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP30475199A JP4066577B2 (ja) | 1999-10-27 | 1999-10-27 | 半導体加速度センサ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP30475199A JP4066577B2 (ja) | 1999-10-27 | 1999-10-27 | 半導体加速度センサ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2001124797A JP2001124797A (ja) | 2001-05-11 |
| JP4066577B2 true JP4066577B2 (ja) | 2008-03-26 |
Family
ID=17936796
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP30475199A Expired - Fee Related JP4066577B2 (ja) | 1999-10-27 | 1999-10-27 | 半導体加速度センサ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4066577B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016125980A (ja) * | 2015-01-08 | 2016-07-11 | 国立大学法人 東京大学 | 圧力センサ |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6292932B2 (ja) * | 2014-03-13 | 2018-03-14 | セイコーインスツル株式会社 | 圧力センサ |
| JP2017181438A (ja) * | 2016-03-31 | 2017-10-05 | 京セラ株式会社 | 応力センサ |
| US10866203B2 (en) | 2016-03-31 | 2020-12-15 | Kyocera Corporation | Stress sensor |
-
1999
- 1999-10-27 JP JP30475199A patent/JP4066577B2/ja not_active Expired - Fee Related
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016125980A (ja) * | 2015-01-08 | 2016-07-11 | 国立大学法人 東京大学 | 圧力センサ |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2001124797A (ja) | 2001-05-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4838229B2 (ja) | 加速度センサー | |
| KR100715644B1 (ko) | 가속도 센서 | |
| KR100824926B1 (ko) | 반도체형 3축 가속도 센서 | |
| JP5486271B2 (ja) | 加速度センサ、及び加速度センサの製造方法 | |
| US20010001550A1 (en) | Integral stress isolation apparatus and technique for semiconductor devices | |
| US6662659B2 (en) | Acceleration sensor | |
| US20030057447A1 (en) | Acceleration sensor | |
| CN100334453C (zh) | 加速度传感器 | |
| JP4589605B2 (ja) | 半導体多軸加速度センサ | |
| JP4066577B2 (ja) | 半導体加速度センサ | |
| JPH04315056A (ja) | 加速度センサ | |
| JP3191770B2 (ja) | 半導体加速度センサ及びその製造方法 | |
| JP4486103B2 (ja) | 加速度センサ、及び加速度センサの製造方法 | |
| JP2010256234A (ja) | 加速度センサ | |
| JP2006098323A (ja) | 半導体型3軸加速度センサ | |
| CN100422697C (zh) | 加速度传感器 | |
| JP4466344B2 (ja) | 加速度センサ | |
| JPH05340956A (ja) | 加速度センサ | |
| JP2624311B2 (ja) | 半導体センサ | |
| JP2006153516A (ja) | 加速度センサ | |
| WO2009119840A1 (ja) | 加速度センサ素子、加速度センサ装置、および加速度センサ素子の製造方法 | |
| JPS60148171A (ja) | 半導体装置 | |
| JP2005241307A (ja) | 加速度センサ | |
| JP2010256221A (ja) | 加速度センサ及び加速度センサ装置 | |
| JP2006153518A (ja) | 加速度センサ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20041122 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20041214 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050113 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20050607 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050808 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20060926 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20061122 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20071218 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20071231 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110118 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110118 Year of fee payment: 3 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110118 Year of fee payment: 3 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120118 Year of fee payment: 4 |
|
| LAPS | Cancellation because of no payment of annual fees |