JP4053147B2 - 内視鏡治療装置 - Google Patents
内視鏡治療装置 Download PDFInfo
- Publication number
- JP4053147B2 JP4053147B2 JP20631498A JP20631498A JP4053147B2 JP 4053147 B2 JP4053147 B2 JP 4053147B2 JP 20631498 A JP20631498 A JP 20631498A JP 20631498 A JP20631498 A JP 20631498A JP 4053147 B2 JP4053147 B2 JP 4053147B2
- Authority
- JP
- Japan
- Prior art keywords
- gripping
- grasping
- body cavity
- endoscope
- forceps
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images




















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/04—Surgical instruments, devices or methods for suturing wounds; Holders or packages for needles or suture materials
- A61B17/0469—Suturing instruments for use in minimally invasive surgery, e.g. endoscopic surgery
Landscapes
- Surgical Instruments (AREA)
Description
【発明の属する技術分野】
本発明は、軟性の挿入部を有する内視鏡と、この内視鏡のチャンネルを通じて体腔内に導入される処置具とを組み合わせ、体腔内組織部の縫合を行う内視鏡治療装置に関する。
【0002】
【従来の技術】
従来より、軟性の挿入部を有する内視鏡と、この内視鏡のチャンネルを通じて体腔内に導入される処置具とを組み合わせて、体腔内の治療を行う手技が行われている。この種の内視鏡装置を用いて体腔内の臓器を縫合する手技に関しては実公昭58−35219号公報や特開平1−129843号公報に記されている。
【0003】
【発明が解決しようとする課題】
(従来技術の問題点)
実公昭58−35219号公報のものでは縫合針の内部に抜止めチップ及び中間チップなるものを収納し、縫合針を粘膜に穿刺貫通する都度、チップを放出し、縫合針の穿刺と引き抜く作業を繰り返すことにより縫合する方法である。しかし、この方式のものでは縫合針の内部に抜止めチップ及び中間チップなるものを収納しておく必要があるため、その分、縫合針の外径が太くなり、縫合針を穿刺することによる臓器の穿刺開口を大きくしてしまう。その結果、縫合が不十分となる虞がある。
【0004】
また、特開平1−129843号公報のものでは、内視鏡のチャンネルを通じて挿入した把持鉗子によって縫合針を把持しながら縫合するという記述がなされている。しかし、この後者の従来例にあっては軟性な挿入部を有する内視鏡を介して把持鉗子及び縫合針をそれぞれ操作するものであるため、術者による機械的な操作力が把持鉗子さらには縫合針の先端まで充分に伝わりにくい。そのため、十分な穿刺あるいは十分な縫合を行うことが難しい。
【0005】
(発明の目的)
本発明は、内視鏡と把持鉗子を組み合わせて体腔内の生体組織を縫合する内視鏡治療装置にあって、体腔内の生体組織の縫合を容易かつ確実に行えるようにした内視鏡治療装置を提供することを目的とする。
【0006】
【課題を解決するための手段及び作用】
請求項1に係る発明は、体腔内を観察するための観察手段を備えた内視鏡と、体腔内の生体組織を縫合するための縫合糸を備えた縫合針と、前記縫合針を把持する把持部と、この把持部を先端に備えた軟性の挿入部と、前記内視鏡の観察下で前記把持部に前記縫合針を把持する操作を行うための操作部とを備えた把持鉗子と、前記把持鉗子の把持部と該把持鉗子の挿入部を挿通して、前記把持部を前記体腔内に案内するチャンネルを備えた軟性の挿入部を有する案内具と、前記把持鉗子に設けられ、前記把持部によって把持される縫合針に該縫合針による穿刺を補助する物理エネルギーを伝達するエネルギー伝達手段と、前記エネルギー伝達手段に接続され、該エネルギー伝達手段を通じて前記把持部によって把持される縫合針に前記物理エネルギーを供給するエネルギー供給手段と、を具備することを特徴とする内視鏡治療装置である。
請求項2に係る発明は、体腔内を観察するための観察手段を備えた内視鏡と、体腔内の生体組織を縫合するための縫合糸を備えた縫合針と、前記縫合針を把持する把持部と、この把持部を先端に備えた軟性の挿入部と、前記内視鏡の観察下で前記把持部に前記縫合針を把持する操作を行うための操作部とを備えた把持鉗子と、前記把持鉗子の把持部と該把持鉗子の挿入部を挿通して、前記把持部を前記体腔内に案内するチャンネルを備えた軟性の挿入部を有するとともに前記体腔内での前記観察手段による視野範囲内で前記把持部を移動させる湾曲部を備えた案内具と、前記把持鉗子に設けられ、前記把持部によって把持される縫合針に該縫合針による穿刺を補助する物理エネルギーを伝達するエネルギー伝達手段と、前記エネルギー伝達手段に接続され、該エネルギー伝達手段を通じて前記把持部によって把持される縫合針に前記物理エネルギーを供給するエネルギー供給手段と、を具備することを特徴とする内視鏡治療装置である。
請求項3に係る発明は、体腔内を観察するための観察手段を備えた内視鏡と、体腔内の生体組織を縫合するための縫合糸を備えた縫合針と、前記縫合針を把持する一対の開閉子を備えた把持部と、この把持部を先端に備えた軟性の挿入部と、前記内視鏡の観察下で前記把持部に前記縫合針を把持する操作を行うための操作部とを備え、前記一対の開閉子は前記挿入部の長軸方向と略同軸の向きに前記縫合針を把持する縦溝を備えた把持鉗子と、前記把持鉗子の把持部と該把持鉗子の挿入部を挿通して、前記把持部を前記体腔内に案内するチャンネルを備えた軟性の挿入部を有するとともに前記体腔内での前記観察手段による視野範囲内で前記把持部を移動させる湾曲部を備えた案内具と、前記把持鉗子に設けられ、前記把持部によって把持される縫合針に該縫合針による穿刺を補助する物理エネルギーを伝達するエネルギー伝達手段と、前記エネルギー伝達手段に接続され、該エネルギー伝達手段を通じて前記把持部によって把持される縫合針に前記物理エネルギーを供給するエネルギー供給手段と、を具備することを特徴とする内視鏡治療装置である。
請求項4に係る発明は、体腔内を観察するための観察手段を備えた内視鏡と、体腔内の生体組織を縫合するための縫合糸を備えた縫合針と、前記縫合針を把持する一対の開閉子を備えた第1の把持部と、この第1の把持部を先端に備えた軟性の第1の挿入部と、前記内視鏡の観察下で前記第1の把持部に前記縫合針を把持する操作を行うための第1の操作部とを備え、前記一対の開閉子は前記第1の挿入部の長軸方向と略同軸の向きに前記縫合針を把持する縦溝を備えた第1の把持鉗子と、前記縫合針を把持する一対の開閉子を備えた第2の把持部と、この第2の把持部を先端に備えた軟性の第2の挿入部と、前記内視鏡の観察下で前記第2の把持部に前記縫合針を把持する操作を行うための第2の操作部とを備え、前記一対の開閉子は前記第2の挿入部の長軸方向の向きに略垂直な向きに前記縫合針を把持する横溝を備えた第2の把持鉗子と、前記第1の把持部と前記第1の挿入部を挿通して、前記第1の把持部を前記体腔内に案内するチャンネルを備えるとともに前記体腔内での前記観察手段による視野範囲内で前記第1の把持部を移動させる第1の湾曲部を備えた軟性の挿入部を有する第1の案内具と、前記第2の把持部と前記第2の挿入部を挿通して、前記第2の把持部を前記体腔内に案内するチャンネルを備えるとともに前記体腔内での前記観察手段による視野範囲内で前記第2の把持部を移動させる第2の湾曲部を備えた挿入部を有する第2の案内具と、前記第1の把持鉗子に設けられ、前記第1の把持部によって把持される縫合針に該縫合針による穿刺を補助する物理エネルギーを伝達するエネルギー伝達手段と、前記第1の把持鉗子に接続され、前記エネルギー伝達手段に前記物理エネルギーを供給するエネルギー供給手段と、を具備することを特徴とする内視鏡治療装置である。
請求項5に係る発明は、第1の把持部は、前記開閉子に把持する前記縫合針の基端を突き当てる突当て部を設けたことを特徴とする請求項3または請求項4に記載の内視鏡治療装置である。
本発明では、内視鏡の観察下の体腔内において、処置具で縫合針の把持及びその操作を行うと共に、体腔内臓器の生体組織に縫合針を穿刺する際、縫合針に前記処置具の手元側から穿刺補助エネルギーを伝達しながら穿刺を行う。このことにより軟性の挿入部を有した把持鉗子または軟性の挿入部を有した案内具との組み合わせのものであっても体腔内臓器の生体組織部位への縫合針の穿刺が容易かつ確実に行える。
【0007】
【発明の実施の形態】
[第1の実施形態]
図1乃至図18を参照して本発明の第1の実施形態を説明する。
(構成)
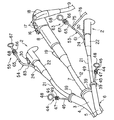
図1は内視鏡治療装置の先端側部分を示す斜視図であり、図2は同じくその内視鏡治療装置の手元側部分を示す斜視図である。内視鏡治療装置は内視鏡1と、2つの処置具誘導挿入具2と、3つのガイド用チューブ部3,4,5を備えた導入ガイド体としてのオーバーチューブ6を備える。
【0008】
上記内視鏡1は軟性の挿入部7と手元操作部8を有し、手元操作部8には図示しない光源装置やビデオプロセッサー等に接続するユニバーサルコード9が連結されている。内視鏡1の本体には観察光学系、照明光学系及びチャンネル管路などが内蔵されている。上記挿入部7は先端部10とこれに隣接した湾曲部11とこの湾曲部11の手元側に接続された可撓管12とによって構成されている。また、上記挿入部7の先端部10には観察光学系の観察窓13、照明光学系の照明窓14及びチャンネル管路の先端開口部15が形成されている。
【0009】
内視鏡1の手元操作部8には挿入部7の湾曲部11を湾曲するときに操作するアングルノブ16の他に、送気、送水、吸引等の切換え操作を行う各種の操作用ボタン17や各種スイッチの操作ボタン用ボックス18が設けられている。さらに手元操作部8には上記チャンネル管路に通じる処置具挿入口部19が設けられている。そして、この処置具挿入口部19から処置具を挿入し、上記チャンネル管路を通じて先端開口部15からその処置具の先端部分を突き出せるようになっている。
【0010】
尚、この内視鏡1には図示を省略したが、観察レンズを洗浄、そして、送気が行えるノズルを含め、従来より用いられている内視鏡のものと同様な構造が組み込まれている。
【0011】
上記処置具誘導挿入具2はいずれも軟性の挿入部21と手元操作部22を有しており、上記挿入部21には図5で示すように処置具を挿通するためのチャンネル管路23が形成されている。このチャンネル管路23は手元操作部22に設けた処置具挿入口部24から挿入部21の先端に開口した先端開口部25にわたり形成されている。上記処置具誘導挿入具2の挿入部21は可撓管26とこの先端に接続される湾曲部27とこの先端に接続される上記先端部28により構成されている。湾曲部27は一般的な内視鏡と同様、図2及び図3で示すように手元操作部22に設けたアングルノブ30により挿入部21内に挿通配置した操作ワイヤ31を押し引きすることによって湾曲操作される。
【0012】
ここでの処置具誘導挿入具2の挿入部21には主に手元側から先端まで処置具を挿通するためのチャンネル管路23が形成されており、一般的な内視鏡のように観察光学系、照明光学系、他のチャンネル管路等は設けられていない。このため、当然ながら処置具誘導挿入具2の挿入部21は上記内視鏡1の挿入部7よりも外径が細く形成されている。
【0013】
上記内視鏡治療装置における各器具の手元側部分は図2で示されるように、いずれも患者体腔外にて術者が操作する部分であり、特に内視鏡1の手元操作部8と、2つの処置具誘導挿入具2の手元操作部22はいずれも図3で示すように、操作部架台33に保持されるようになっている。操作部架台33は支柱34により支持されている。
【0014】
上記内視鏡1及び処置具誘導挿入具2は高周波電流を用いる処置具を併用する際においての漏電を防止するために外装、特に挿入部の外装部分は電気的絶縁構造に構成されている。また、後述する縫合針の先端部を除く各器具の外周に電気的絶縁コーティングを施すようにしてもよい。
【0015】
上記オーバーチューブ6は図1及び図2に示す如く、内視鏡1の挿入部7を挿通するための第1のチューブ部3と、2本の処置具誘導挿入具2の挿入部21をそれぞれ個別的に挿通するための第2のチューブ部4及び第3のチューブ部5の計3本のチューブ部分を束ねた構成となっている。そして、各チューブ部3,4,5によって内視鏡1の挿入部7と処置具誘導挿入具2の挿入部21をそれぞれ個別に挿通し得るチャンネル管路を形成する。これらのチューブ部3,4,5はいずれも柔軟な素材、例えばウレタン樹脂や多孔質フッ素樹脂などにより作られたチューブ部材で形成されている。
【0016】
また、図9及び図10で示す如く、オーバーチューブ6の各チューブ部3,4,5は患者の体腔内に挿入することになる先端側部分のみが結束されている。つまり、最も径が大きな第1のチューブ部3の先端部外周面に第2のチューブ部4の先端部と第3のチューブ部5の先端部を接合して結束している。各チューブ部3,4,5の先端部分を結束する手段としては第2のチューブ部4の先端と第3のチューブ部5の先端から延出してそれぞれ舌片35を設け、これらの舌片35を第1のチューブ部3の先端部外周面に接合し、この接合した状態の舌片35に糸36を巻き付けて第1のチューブ部3の先端部外周面に固定的に結束する。舌片35および糸36の外表面は接着剤37を塗布することにより外表面が滑らかに仕上げられている。また、図10に示す如く、第1のチューブ部3の先端部内腔には金属製もしくは硬質な樹脂製のリング状の口金部材39を嵌め込み、これにより上記結束部を補強している。
【0017】
また、第2のチューブ部4の先端と第3のチューブ部5の先端はそれぞれのチューブ軸方向に対して鋭角となるように後方へ斜めに傾斜した傾斜端面38を形成している。
【0018】
以上の如く、オーバーチューブ6における先端部20は結束されるが、患者体腔外側に位置する3本のチューブ部3,4,5の手元側部分は図9で示す如く、いずれもフリーな状態で独立している。そして、各チューブ部3,4,5の手元端にはそれぞれ口金39が設けられている。
【0019】
図9及び図10で示すように、オーバーチューブ6における、特に処置具誘導挿入具2の挿入部21を挿通するための第2のチューブ部4の先端開口部内、及び第3のチューブ部5の先端開口部内にはそれぞれ起上台41を備えた起上機構が設けられている。各起上台41はこれを設けるチューブ部4,5の壁面に取着した枢支ピン42により手元側端が枢着され、先端側部分が回動端となって取り付けられている。また、各起上台41の先端側部分には操作ワイヤ43が連結されている。操作ワイヤ43はチューブ部4,5内を通じて手元側に延在し、起上操作部44に連結されている。そして、起上操作部44による操作で操作ワイヤ43が牽引されると、上記起上台41は起上し、第2のチューブ部4及び第3のチューブ部5のチャンネルを通じて体腔内に挿入した処置具の先端部を第1のチューブ部3から離れる向きに向けて起上するようになっている。
【0020】
上記各起上操作部44は図2及び図9で示す如く、チューブ部4,5の手元端に設けられた口金39の部分から導出する可撓性シース45と、この可撓性シース45の延出先端に取着された保持本体46と、この保持本体46にスライド自在に装着されたスライド部材47を有してなり、保持本体46とスライド部材47には指掛け部48,49が形成されている。上記操作ワイヤ43は可撓性シース45内を通じてスライド部材47に連結されている。スライド部材47により操作ワイヤ43を進退させることができるようになっている。
尚、この起上操作部44は従前または後述する把持鉗子の手元操作部と同様な構成であってもよい。
【0021】
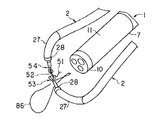
2本の処置具誘導挿入具2のうち一方、例えば左側に位置する処置具誘導挿入具2のチャンネル管路23には縫合糸51が接続された縫合針52と、この縫合針52を把持して生体組織に対して穿刺するための穿刺用把持鉗子53が挿通される。また、他方の処置具誘導挿入具2のチャンネル管路23には縫合糸51及び生体組織を把持する操作用把持鉗子54が挿通される。
【0022】
図6は一方の処置具誘導挿入具2に挿通される穿刺用把持鉗子53と、この穿刺用把持鉗子53によって把持する縫合針52と、この縫合針52に接続される縫合糸51とを示している。図7は穿刺用把持鉗子53の縦断面図を示すものである。
【0023】
上記穿刺用把持鉗子53は処置具誘導挿入具2に挿通される挿入部61と、挿入部61の先端に設けられ、手元側での操作により開閉動作を行う先端把持部62と、上記挿入部61の後方に接続される手元側操作部63で構成されている。上記挿入部61は少なくとも外表面部分が電気的絶縁被覆されるシースによって形成されている。上記手元側操作部63は保持本体65と、この保持本体65にスライド自在に装着されたスライド部材66を有してなり、保持本体65とスライド部材66には指掛け部67,68が形成されている。手元側操作部63の保持本体65及びスライド部材66も電気的絶縁構造のものである。挿入部61内には操作ワイヤ69が挿通されている。操作ワイヤ69の先端は先端把持部62に接続され、操作ワイヤ69の後端は上記手元側操作部63のスライド部材66に接続されている。そして、このスライド部材66を移動操作することにより操作ワイヤ69を進退させて先端把持部62を開閉することができるようになっている。
【0024】
上記先端把持部62はこれまで従来において用いられている把持鉗子と同様または前述した通りの手元側操作部63での操作により開閉動作を行う一対の開閉子71a,71bを備えてなり、操作ワイヤ69の進退により複数のリンク72a,72bを介して開閉するようになっている。
【0025】
上記開閉子71a,71bの先端形状は図示するように縫合針52を、穿刺用把持鉗子53の挿入部61の軸方向と略同軸の向きに把持できるように溝部73a,73bが形成されている。さらに、一方の開閉子71aの一方の内側壁面には縫合針52を把持する際、その縫合針52の基端が上記挿入部61の軸方向に垂直に突き当たる突当て部74が形成されている。
【0026】
上記穿刺用把持鉗子53は開閉子71a,71b及びこれに接続される操作ワイヤ69が導電性部材または導電性部材を含んで形成されている。また、操作ワイヤ69は上記手元側操作部63の保持本体65の途中に設けられた通電コード接続部75に接続されている。通電コード接続部75には従来より用いられている高周波電流を用いて生体組織の処置を行う生検鉗子等と同様、図示しない外部の電源装置より導かれてきた電源コード76が接続され、これらにより上記穿刺用把持鉗子53の開閉子71a,71bまで高周波電流を通電する通電手段を構成している。そして、この通電手段は穿刺用把持鉗子53の先端把持部62により把持した縫合針52に高周波電流を通電し、上記縫合針52による穿刺を補助する物理エネルギーを伝達する手段を構成している。
【0027】
上記穿刺用把持鉗子53に把持される縫合針52は導電性を有する例えば金属によって作られている。縫合針52の先端には生体組織に対して穿刺が可能となるように鋭利な尖部77が形成されている。また、縫合針52の基端部近傍の側壁部には柔軟な縫合糸51が接続され、上記縫合糸51は手元側まで延在している。
【0028】
一方、他方の処置具誘導挿入具2に、挿入部83が挿通され、生体組織と縫合針52を把持する操作用把持鉗子54はその先端把持部80が図8で示すように構成されている。すなわちその把持用開閉子81a,81bの先端に生体組織の把持を保持するための爪部82が形成され、かつ開閉子81a,81bには上記縫合針52の略中心部をその把持鉗子54の挿入部83の軸方向に垂直な方向に把持できるように横溝84が形成されている。また、この他方の処置具誘導挿入具2に挿通する操作用把持鉗子54の手元側操作部55も上記穿刺用把持鉗子53の手元側操作部63と同様に保持本体65と、この保持本体65にスライド自在に装着されたスライド部材66を有してなり、保持本体65とスライド部材66には指掛け部67,68が形成されている。
【0029】
(作用)
上記第1の実施形態の内視鏡治療装置の作用について説明する。まず、高周波電流による処置を施すことから、対極板なる金属製の板部材を患者の体外表面に密着させておく。また、内視鏡1の挿入部7にオーバーチューブ6における第1のチューブ部3を被嵌し、通常の内視鏡検査の要領で内視鏡1の挿入部7を患者の上部消化管臓器、例えば食道や胃に挿入する。内視鏡1の挿入部7が体腔内まで挿入されたらその内視鏡1の挿入部7をガイドとして、予め手元側に退避させて置いたオーバーチューブ6の全体を体腔内に挿入する。その際、内視鏡1の挿入部7が挿通されている第1のチューブ部3以外の第2チューブ部4及び第3のチューブ部5の先端はチューブ軸方向に対して鋭角となる斜めに傾斜する傾斜端面38を形成していることから挿入時における粘膜などへの擦過による影響を少なくすることができる。このため、極力生体にダメージを与えることなくオーバーチューブ6の全体を挿入することが可能である。
【0030】
次に、オーバーチューブ6における第2のチューブ部4及び第3のチューブ部5に処置具誘導挿入具2の挿入部21をそれぞれ並行に挿入していき、その処置具誘導挿入具2の挿入部21の先端を、上記内視鏡1の挿入部7と共に体腔内の病変部位に誘導する。一方、内視鏡1の操作部8、及び処置具誘導挿入具2の手元操作部22を図3に示すように操作部架台33にそれぞれ設置し、内視鏡1、及び処置具誘導挿入具2のチャンネル管路23に処置具53,54の挿入部61,83をそれぞれ挿通していく。この状態で、術者は図4に示すTVモニタの内視鏡画像40を観察しながら体腔内の治療を行う。
【0031】
ここで、図11乃至図18を参照して本実施形態による体腔内の治療方法を生体組織の縫合を例にして説明する。
前述したように2本の処置具誘導挿入具2のチャンネル管路23にそれぞれ挿通した穿刺用把持鉗子53と操作用把持鉗子54を体腔内の目的部位まで誘導していく。この際、穿刺用把持鉗子53にて把持される縫合針52に接続された縫合糸51は処置具誘導挿入具2のチャンネル管路23内に挿通されており、その縫合糸51の基端側部分は図示しないが、処置具誘導挿入具2の手元側まで延在している。その後、オーバーチューブ6の第2のチューブ部4と第3のチューブ部5の先端開口部に設けられた起上台41を適宜起上操作することで、上記第2のチューブ部4と第3のチューブ部5にそれぞれ挿通された処置具誘導挿入具2の挿入部21の突き出し先端部を内視鏡1の挿入部7から離れるように起上操作する。
【0032】
そして、処置具誘導挿入具2の湾曲部27を湾曲する操作を行って、図11に示すように、処置具誘導挿入具2の先端部28が内視鏡1の先端部10に向き合っている目的部位に対し、内視鏡1の先端部10の左右方向から到達するように調整する。ここでは、図12に示す如く、目的部位である例えば病変部の切除を行った後などの体腔内臓器の開口部86に対して、まず操作用把持鉗子54を用いて開口切断縁部87を把持拳上し、一方、穿刺用把持鉗子53によって、拳上された組織部分に穿刺用把持鉗子53の先端把持部62に把持した縫合針52の尖部77を穿刺する。
【0033】
この際、手元側から縫合針52を把持する穿刺用把持鉗子53を押し込む操作を行うことになるが、穿刺用把持鉗子53の挿入部61及び処置具誘導挿入具2の挿入部21が共に軟性でかつ相当な長さを有するため、押し込む力だけでは縫合針52を組織に対して穿刺するのに十分な力を伝えることができないのが普通である。
【0034】
そこで、前述の通り、この穿刺と同時に穿刺用把持鉗子53に高周波電流を通電する。縫合針52を穿刺すると同時にその縫合針52に高周波電流を通電することにより、縫合針52の尖部77での組織接触点にて上記生体組織が破壊されていく。このため、手元側からの軽い押し込み力量でも容易に全層に穿刺することが可能となる。
尚、高周波電流の通電時間は安全性の点で一定時間通電すると、自動的に通電を止めるようにプログラムするようにしてもよい。
【0035】
次いで、図12に示すように、操作用把持鉗子54で開口部86の縫合対称部位の組織部を把持拳上し、先と同様に高周波電流を選択的に通電しながら穿刺用把持鉗子53で縫合針52を続けて穿刺する。
【0036】
次に、図13に示すように、操作用把持鉗子54にて穿刺された縫合針52の先端部近傍もしくは中間部近傍を鉗子挿入部軸方向の垂直となる方向で把持し、組織に穿刺されている縫合針52を引き出していく。
【0037】
そして、図14に示すように、引き出された縫合針52を穿刺用把持鉗子53に引き渡す。その後、図15に示すように、操作用把持鉗子53による開口切断縁部87を把持拳上し、そして縫合針52を把持する穿刺用把持鉗子53による組織の穿刺及び縫合作業を繰り返し行い、開口部86の縫合を行っていく。
【0038】
図16は開口切断縁部87の縫合作業が終了したところの様子を示し、この段階において、手元側まで延在する縫合糸51の基端部分と縫合針52を把持する操作用把持鉗子54との両方を牽引し、縫合された開口部86での縫合糸51を絞めて緊縛する。
【0039】
ここで、縫合糸51の緊張を維持させながら一方の処置具誘導挿入具2に挿通される穿刺用把持鉗子53を抜去し、図17に示すように、その一方の処置具誘導挿入具2のチャンネル管路23を通じて縫合糸結紮用のクリップ88を挿通していき、縫合部の両端にある縫合糸51を把持する。上記縫合糸結紮用クリップ88は縫合糸51を把持しながらの固定操作を施すことで縫合糸51の一端の切断と結紮固定を維持することが可能なものであり、この作用を利用して縫合部両端の縫合糸51を把持した後にクリップ88を留置しながら結紮固定する。結紮された縫合部89は図18で示すようになる。
【0040】
(効果)
上記第1の実施形態の構成による穿刺用把持鉗子53を用いた内視鏡治療装置により体腔内臓器の縫合を内視鏡的に行うと、縫合針52による穿刺が容易になり、縫合を容易かつ確実に行うことが可能である。
【0041】
[第2の実施形態]
図19を参照して本発明の第2の実施形態を説明する。
(構成)
本実施形態は前述した穿刺用把持鉗子の変形例である。この穿刺用把持鉗子53はその先端把持部62が上記第1の実施形態のものとの同じであり、その手元操作部22の構成が相違し、その手元操作部22が図19で示す如く構成されている。
【0042】
すなわち穿刺用把持鉗子53のシース状の挿入部61の基端部には操作部本体91が接続され、この操作部本体91には操作部材92が挿入部61の軸方向にスライド自在に装着されている。操作部本体91の基端部には指掛け用リング93が形成され、操作部材92の外周には指掛け溝94が形成されている。操作部本体91内には積層型圧電素子95が配設され、この積層型圧電素子95の先端には上記挿入部61の内部に挿通される操作ワイヤ69の後端が連結されている。また、積層型圧電素子95の基端には連結部材96を介して上記操作部材92に連結固定されている。上記積層型圧電素子95は上記操作部材92と共に上記操作部本体91内において移動可能であるが、図19で示すように上記操作部材92を最も手元側に引き寄せた状態ではその積層型圧電素子95の基端が操作部本体91内に形成した突当て部97に当接するように構成されている。
【0043】
そして、この構成では上記操作部材92が操作部本体91上を前後軸方向にスライド可能であり、このスライド操作により上記積層型圧電素子95と共に上記操作ワイヤー69が操作部本体91内を進退するようになっている。
【0044】
図示はしないが、上記積層型圧電素子95には通電する手段が接続されており、前述の第1の実施形態と同様、外部の電源装置から通電されるように構成されている。そして、上記積層型圧電素子95に上記電源装置から矩形波高周波電流を通電することにより上記積層型圧電素子95は圧電効果による変形を繰り返し、その変形によって物理エネルギーの一種である振動波が発生し、この振動波を操作ワイヤ69に伝えるようになっている。さらに操作ワイヤ69はその振動波を穿刺用把持鉗子53の先端把持部62に伝える。つまり、これらによって先端把持部62に把持する上記縫合針52に対して手元側から穿刺補助エネルギーを伝達する手段を構成する。
尚、操作ワイヤ69が振動波を効率良く伝達されるようにするため、上記操作ワイヤ69には金属製の単線ワイヤーが用いられている。
【0045】
(作用)
上記構成による穿刺用把持鉗子53を用いて、上記第1の実施形態にて説明したと同様にして体腔内での縫合を行うが、上記穿刺用把持鉗子53にて生体組織に穿刺を行う際、上記構成にて説明した積層型圧電素子59に矩形波高周波電流を通電し、上記積層型圧電素子59を振動させる。そして、この振動を先端把持部62と縫合針52に伝えてその縫合針52を振動させながら穿刺を行う。その他の作用については第1の実施形態と同じである。
【0046】
(効果)
縫合針52を振動させながら穿刺を行うことにより上記第1の実施形態における作用と同様、体腔内臓器の縫合を内視鏡的に容易かつ確実に行うことが可能となる。
【0047】
尚、本願における穿刺用把持鉗子の構成は上記に説明した第1の実施形態及び第2の実施形態での構成のものに限らず、たとえば高周波電流と振動波が同時、あるいは選択的に先端把持部に伝えるようにすることも考えられる。この他にも熱、電磁波、レーザー等の物理エネルギーを先端把持部で把持される縫合針に伝えることも考えられる。
【0048】
[第3の実施形態]
図20を参照して本発明の第3の実施形態を説明する。
(構成)
前述した第1の実施形態にて用いられるオーバーチューブ6の変形例について説明する。
【0049】
図20は本実施形態におけるオーバーチューブ6を示す斜視図である。このオーバーチューブ6は第1の実施形態と同様、柔軟な樹脂素材からなる複数のチューブ部3,4,5を束ねて構成されている。オーバーチューブ6の先端部20の近傍にて上記第2のチューブ部4と第3のチューブ部5は第1のチューブ部3に接合されており、第2のチューブ部4と第3のチューブ部5における接合部101よりも先端側に位置する部分は上記第1のチューブ部3から離れる向きに湾曲する湾曲部102,103が形成され、それぞれの湾曲部102,103は湾曲機構104によって湾曲される。上記湾曲機構104は上記第2のチューブ部4と第3のチューブ部5にそれぞれ取り付けられるワイヤガイドシース105に挿通された湾曲操作ワイヤー106を牽引することにより湾曲部102,103を湾曲する。
【0050】
湾曲操作ワイヤー106はワイヤガイドシース105の手元端に取着された保持本体107と、この保持本体107にスライド自在に装着されたスライド部材108を有してなり、保持本体107とスライド部材108には指掛け部109,110が形成されている。スライド部材108には湾曲操作ワイヤー106が連結されている。そして、スライド部材108を前後方向へ移動操作することにより湾曲操作ワイヤー106を進退させることができる。
【0051】
(作用)
前述した第1の実施形態と同様に内視鏡1の挿入部7と2本の処置具誘導挿入具2をオーバーチューブ6を用いて患者体腔内の目的部位まで誘導挿入する。そして処置具誘導挿入具2が挿通される第2のチューブ部4と第3のチューブ部5に備わる湾曲機構104を操作して、内視鏡1の挿入部7との距離及び方向を調整しながら上記第1の実施形態と同様に内視鏡1の挿入部7の先端の左右方向から上記処置具誘導挿入具2の先端を目的部位へ到達するように誘導する。
この他の方法、作用については前述した第1の実施形態にて説明したものと同じである。
【0052】
(効果)
上記本実施形態にて説明したオーバーチューブ6を用いることにより、体腔内における処置具誘導挿入具2を第1の実施形態と同様に高い自由度で操作することが可能となり、縫合その他の治療が容易かつ確実に行えるようになる。
【0053】
[第4の実施形態]
図21及び図22を参照して本発明の第4の実施形態を説明する。
(構成)
本実施形態は前述した第1の実施形態にて用いられるオーバーチューブの別の変形例である。
【0054】
本実施形態におけるオーバーチューブ6は上記第1の実施形態と同様、柔軟な樹脂素材からなる複数のチューブ部3,4,5を束ねて構成されるが、本実施形態においての各チューブ部3,4,5の接続は第1のチューブ部3の外側表面においての上下左右、つまり直交する4個所の部分に軸方向に沿って形成された突条の係合凸部112を形成し、さらに第2のチューブ部4と第3のチューブ部5の外表面に軸方向に沿って形成される係合溝113を形成し、係合凸部112に係合溝113を係合させたものである。そして、第2のチューブ部4と第3のチューブ部5は第1のチューブ部3の軸方向にスライドできるように構成されている。さらに、第1のチューブ部3における患者体腔内の先端部114はその外径が連続的に大きくなるようにテーパ状に形成されている。係合凸部112の先端側部分はそのテーパ状外周面に形成される。
【0055】
尚、本実施形態では内視鏡1の挿入部7の左右方向に処置具誘導挿入具2が配置されるように3本のチューブ部3,4,5を係合している例を示すが、各チューブ部4,5の係合は第1のチューブ部3に設けられている4個所の係合凸部112に選択的に行えるようになっている。
【0056】
(作用)
上記第1の実施形態と同様に内視鏡1の挿入部7と2本の処置具誘導挿入具2の挿入部21を、本実施形態にて説明したオーバーチューブ6を用いて患者の体腔内の目的部位まで誘導挿入する。そして、処置具誘導挿入具2が挿通される第2のチューブ部4と第3のチューブ部5を図21及び図22に示すようにオーバーチューブ6の軸方向に沿ってスライド操作することにより、第1のチューブ部3のテーパ状の先端部114において処置具誘導挿入具2の突出方向を内視鏡1の挿入部7より離れる方向に調整され、前述した上記第1の実施形態及び第2の実施形態における方法と同様の治療が行えることになる。
【0057】
(効果)
本実施形態の構成によるオーバーチューブ6を用いることにより、上記第1の実施形態と同様に容易かつ確実な内視鏡的な治療が可能となる。さらに本実施形態でのオーバーチューブ6は第2のチューブ部4と第3のチューブ部5を第1のチューブ部3に対して本数と位置が選択的に組み合わせることが可能となるために、病変となる目的部位などの違いに適切に対応した形態で治療を行うことも可能となる。
【0058】
本発明は前述した各実施形態のものに限定されるものではない。本発明及び上記実施形態の説明によれば少なくとも以下に列記する事項及びそれらの任意の組み合わせに係る事項のものが得られる。
【0059】
<付記>
1.軟性の挿入部を有する内視鏡と、縫合手段を取り扱う処置具とを組み合わせて体腔内組織部の縫合を行う内視鏡治療装置において、上記処置具が取り扱う縫合手段は、生体組織を縫合する縫合糸を接続した縫合針を有し、上記処置具は上記縫合針を着脱自在に把持する把持部を有し、さらに上記処置具は上記縫合針に対して手元側から上記縫合針による穿刺を補助する物理エネルギーを伝達する手段を備えていることを特徴とするもの。
【0060】
2.上記1項に記載の内視鏡治療装置において、上記処置具は上記縫合針を把持し得る把持鉗子であることを特徴とするもの。
3.上記2項に記載の内視鏡治療装置において、上記物理エネルギーが高周波電流であることを特徴とするもの。
【0061】
4.上記3項に記載の内視鏡治療装置において、上記縫合針の先端部以外には電気的絶縁コーティングが施されていることを特徴とするもの。
5.上記2項に記載の内視鏡治療装置において、上記物理エネルギーが超音波振動であることを特徴とするもの。
【0062】
6.上記2項に記載の内視鏡治療装置において、把持鉗子先端の開閉可能な把持部の縫合針把持面に、上記把持鉗子の挿入部軸方向と略同一方向に溝が形成されていることを特徴とするもの。
【0063】
【発明の効果】
以上説明したように、本発明によれば、内視鏡と把持鉗子を組み合わせて体腔内の生体組織を縫合する場合に体腔内の生体組織の縫合を容易かつ確実に行える。
【図面の簡単な説明】
【図1】第1の実施形態に係る内視鏡治療装置の先端側部分の斜視図。
【図2】同じく第1の実施形態に係る内視鏡治療装置の手元側部分の斜視図。
【図3】同じく第1の実施形態に係る内視鏡治療装置の使用状態における手元側部分の斜視図。
【図4】上記内視鏡治療装置のTVモニタにおける内視鏡画像の画面を示す説明図。
【図5】上記内視鏡治療装置の処置具誘導挿入具の挿入部の先端側部分における縦断面図。
【図6】上記内視鏡治療装置の穿刺用把持鉗子における先端部の斜視図。
【図7】上記内視鏡治療装置に用いる穿刺用把持鉗子における先端部の把持状態の縦断面図。
【図8】上記内視鏡治療装置に用いる操作用把持鉗子における先端部の斜視図。
【図9】上記内視鏡治療装置のオーバーチューブの先端部の斜視図。
【図10】上記内視鏡治療装置のオーバーチューブの先端部の縦断面図。
【図11】上記内視鏡治療装置の使用状況の説明図。
【図12】上記内視鏡治療装置の使用状況の説明図。
【図13】上記内視鏡治療装置の使用状況の説明図。
【図14】上記内視鏡治療装置の使用状況の説明図。
【図15】上記内視鏡治療装置の使用状況の説明図。
【図16】上記内視鏡治療装置の使用状況の説明図。
【図17】上記内視鏡治療装置の使用状況の説明図。
【図18】上記内視鏡治療装置の使用状況の説明図。
【図19】第2の実施形態に係る内視鏡治療装置に用いる穿刺用把持鉗子の手元部の縦断面図。
【図20】第3の実施形態に係る内視鏡治療装置のオーバーチューブの斜視図。
【図21】第4の実施形態に係る内視鏡治療装置のオーバーチューブの斜視図。
【図22】同じく第4の実施形態に係る内視鏡治療装置のオーバーチューブの斜視図。
【符号の説明】
1…内視鏡、2…処置具誘導挿入具、3,4,5…ガイド用チューブ部、
6…オーバーチューブ、7…内視鏡の挿入部、8…内視鏡の手元操作部、
21…処置具誘導挿入具の挿入部、22…処置具誘導挿入具の手元操作部、
23…処置具誘導挿入具のチャンネル管路、52…縫合針、
53…穿刺用把持鉗子、62…先端把持部、63…手元側操作部、
69…操作ワイヤ、71a,71b…開閉子、75…通電コード接続部。
Claims (5)
- 体腔内を観察するための観察手段を備えた内視鏡と、
体腔内の生体組織を縫合するための縫合糸を備えた縫合針と、
前記縫合針を把持する把持部と、この把持部を先端に備えた軟性の挿入部と、前記内視鏡の観察下で前記把持部に前記縫合針を把持する操作を行うための操作部とを備えた把持鉗子と、
前記把持鉗子の把持部と該把持鉗子の挿入部を挿通して、前記把持部を前記体腔内に案内するチャンネルを備えた軟性の挿入部を有する案内具と、
前記把持鉗子に設けられ、前記把持部によって把持される縫合針に該縫合針による穿刺を補助する物理エネルギーを伝達するエネルギー伝達手段と、
前記エネルギー伝達手段に接続され、該エネルギー伝達手段を通じて前記把持部によって把持される縫合針に前記物理エネルギーを供給するエネルギー供給手段と、
を具備することを特徴とする内視鏡治療装置。 - 体腔内を観察するための観察手段を備えた内視鏡と、
体腔内の生体組織を縫合するための縫合糸を備えた縫合針と、
前記縫合針を把持する把持部と、この把持部を先端に備えた軟性の挿入部と、前記内視鏡の観察下で前記把持部に前記縫合針を把持する操作を行うための操作部とを備えた把持鉗子と、
前記把持鉗子の把持部と該把持鉗子の挿入部を挿通して、前記把持部を前記体腔内に案内するチャンネルを備えた軟性の挿入部を有するとともに前記体腔内での前記観察手段による視野範囲内で前記把持部を移動させる湾曲部を備えた案内具と、
前記把持鉗子に設けられ、前記把持部によって把持される縫合針に該縫合針による穿刺を補助する物理エネルギーを伝達するエネルギー伝達手段と、
前記エネルギー伝達手段に接続され、該エネルギー伝達手段を通じて前記把持部によって把持される縫合針に前記物理エネルギーを供給するエネルギー供給手段と、
を具備することを特徴とする内視鏡治療装置。 - 体腔内を観察するための観察手段を備えた内視鏡と、
体腔内の生体組織を縫合するための縫合糸を備えた縫合針と、
前記縫合針を把持する一対の開閉子を備えた把持部と、この把持部を先端に備えた軟性の挿入部と、前記内視鏡の観察下で前記把持部に前記縫合針を把持する操作を行うための操作部とを備え、前記一対の開閉子は前記挿入部の長軸方向と略同軸の向きに前記縫合針を把持する縦溝を備えた把持鉗子と、
前記把持鉗子の把持部と該把持鉗子の挿入部を挿通して、前記把持部を前記体腔内に案内するチャンネルを備えた軟性の挿入部を有するとともに前記体腔内での前記観察手段による視野範囲内で前記把持部を移動させる湾曲部を備えた案内具と、
前記把持鉗子に設けられ、前記把持部によって把持される縫合針に該縫合針による穿刺を補助する物理エネルギーを伝達するエネルギー伝達手段と、
前記エネルギー伝達手段に接続され、該エネルギー伝達手段を通じて前記把持部によって把持される縫合針に前記物理エネルギーを供給するエネルギー供給手段と、
を具備することを特徴とする内視鏡治療装置。 - 体腔内を観察するための観察手段を備えた内視鏡と、
体腔内の生体組織を縫合するための縫合糸を備えた縫合針と、
前記縫合針を把持する一対の開閉子を備えた第1の把持部と、この第1の把持部を先端に備えた軟性の第1の挿入部と、前記内視鏡の観察下で前記第1の把持部に前記縫合針を把持する操作を行うための第1の操作部とを備え、前記一対の開閉子は前記第1の挿入部の長軸方向と略同軸の向きに前記縫合針を把持する縦溝を備えた第1の把持鉗子と、
前記縫合針を把持する一対の開閉子を備えた第2の把持部と、この第2の把持部を先端に備えた軟性の第2の挿入部と、前記内視鏡の観察下で前記第2の把持部に前記縫合針を把持する操作を行うための第2の操作部とを備え、前記一対の開閉子は前記第2の挿入部の長軸方向の向きに略垂直な向きに前記縫合針を把持する横溝を備えた第2の把持鉗子と、
前記第1の把持部と前記第1の挿入部を挿通して、前記第1の把持部を前記体腔内に案内するチャンネルを備えるとともに前記体腔内での前記観察手段による視野範囲内で前記第1の把持部を移動させる第1の湾曲部を備えた軟性の挿入部を有する第1の案内具と、
前記第2の把持部と前記第2の挿入部を挿通して、前記第2の把持部を前記体腔内に案内するチャンネルを備えるとともに前記体腔内での前記観察手段による視野範囲内で前記第2の把持部を移動させる第2の湾曲部を備えた挿入部を有する第2の案内具と、
前記第1の把持鉗子に設けられ、前記第1の把持部によって把持される縫合針に該縫合針による穿刺を補助する物理エネルギーを伝達するエネルギー伝達手段と、
前記第1の把持鉗子に接続され、前記エネルギー伝達手段に前記物理エネルギーを供給するエネルギー供給手段と、
を具備することを特徴とする内視鏡治療装置。 - 第1の把持部は、前記開閉子に把持する前記縫合針の基端を突き当てる突当て部を設けたことを特徴とする請求項3または請求項4に記載の内視鏡治療装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP20631498A JP4053147B2 (ja) | 1998-07-22 | 1998-07-22 | 内視鏡治療装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP20631498A JP4053147B2 (ja) | 1998-07-22 | 1998-07-22 | 内視鏡治療装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2000037390A JP2000037390A (ja) | 2000-02-08 |
| JP2000037390A5 JP2000037390A5 (ja) | 2005-10-13 |
| JP4053147B2 true JP4053147B2 (ja) | 2008-02-27 |
Family
ID=16521256
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP20631498A Expired - Fee Related JP4053147B2 (ja) | 1998-07-22 | 1998-07-22 | 内視鏡治療装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4053147B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010207342A (ja) * | 2009-03-09 | 2010-09-24 | Olympus Medical Systems Corp | 医療機器 |
Families Citing this family (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7637905B2 (en) * | 2003-01-15 | 2009-12-29 | Usgi Medical, Inc. | Endoluminal tool deployment system |
| JP4261814B2 (ja) * | 2001-04-04 | 2009-04-30 | オリンパス株式会社 | 組織穿刺システム |
| US7144401B2 (en) * | 2001-06-07 | 2006-12-05 | Olympus Optical Co., Ltd. | Suturing device for endoscope |
| US8753262B2 (en) | 2003-07-29 | 2014-06-17 | Hoya Corporation | Internal treatment apparatus having circumferential side holes |
| JP2005296412A (ja) * | 2004-04-13 | 2005-10-27 | Olympus Corp | 内視鏡治療装置 |
| JP2005334237A (ja) * | 2004-05-26 | 2005-12-08 | Olympus Corp | 内視鏡装置 |
| EP1607036A1 (fr) * | 2004-06-18 | 2005-12-21 | Universite Libre De Bruxelles | Support d' instruments comprenant une bague et montable sur un endoscope |
| JP4302602B2 (ja) * | 2004-09-24 | 2009-07-29 | オリンパス株式会社 | 内視鏡用処置具及び内視鏡処置システム並びに支持アダプタ |
| JP4592007B2 (ja) * | 2005-02-15 | 2010-12-01 | Hoya株式会社 | 対象物内部処置装置及び対象物内部処置システム |
| EP1859743B1 (en) | 2005-03-17 | 2015-08-05 | Olympus Corporation | Suture instrument |
| US9345462B2 (en) | 2006-12-01 | 2016-05-24 | Boston Scientific Scimed, Inc. | Direct drive endoscopy systems and methods |
| US8226665B2 (en) * | 2008-04-04 | 2012-07-24 | Tyco Healthcare Group Lp | Ultrasonic needle driver |
| US20090259105A1 (en) * | 2008-04-10 | 2009-10-15 | Miyano Hiromichi | Medical treatment system and suturing method |
| JP5336760B2 (ja) * | 2008-05-01 | 2013-11-06 | オリンパスメディカルシステムズ株式会社 | 内視鏡システム |
| JP5537097B2 (ja) * | 2008-09-02 | 2014-07-02 | オリンパスメディカルシステムズ株式会社 | 医療機器 |
| US8777839B2 (en) | 2008-09-02 | 2014-07-15 | Olympus Medical Systems Corp. | Shock absorbing mechanism and medical instrument |
| CA2806278C (en) * | 2010-07-28 | 2020-08-04 | Medrobotics Corporation | Surgical positioning and support system |
| US9962179B2 (en) * | 2011-04-06 | 2018-05-08 | Medrobotics Corporation | Articulating surgical tools and tool sheaths, and methods of deploying the same |
| WO2016143143A1 (ja) * | 2015-03-12 | 2016-09-15 | 学校法人慶應義塾 | 処置具挿入補助具 |
| JP6623462B2 (ja) * | 2015-03-12 | 2019-12-25 | 学校法人慶應義塾 | 処置具挿入補助具 |
| JPWO2017109923A1 (ja) * | 2015-12-24 | 2018-10-11 | オリンパス株式会社 | 結紮デバイス |
| WO2019097560A1 (ja) * | 2017-11-14 | 2019-05-23 | オリンパス株式会社 | 医療用把持具 |
| WO2021176636A1 (ja) * | 2020-03-05 | 2021-09-10 | オリンパス株式会社 | 内視鏡用持針器および内視鏡下縫合方法 |
| WO2022137433A1 (ja) * | 2020-12-24 | 2022-06-30 | オリンパス株式会社 | 医療用ステープラ |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5551443Y2 (ja) * | 1977-03-28 | 1980-12-01 | ||
| JP3476878B2 (ja) * | 1993-11-15 | 2003-12-10 | オリンパス株式会社 | 手術用マニピュレータ |
| JP3625894B2 (ja) * | 1995-05-29 | 2005-03-02 | オリンパス株式会社 | 医療用処置装置 |
| JP3055866B2 (ja) * | 1995-07-07 | 2000-06-26 | 裕一 松澤 | 手術用の縫合針 |
-
1998
- 1998-07-22 JP JP20631498A patent/JP4053147B2/ja not_active Expired - Fee Related
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010207342A (ja) * | 2009-03-09 | 2010-09-24 | Olympus Medical Systems Corp | 医療機器 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2000037390A (ja) | 2000-02-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4053147B2 (ja) | 内視鏡治療装置 | |
| JP4790549B2 (ja) | 縫合具 | |
| US8480689B2 (en) | Suturing device | |
| JP4756943B2 (ja) | 内視鏡用縫合装置 | |
| JP4153186B2 (ja) | 内視鏡用縫合器 | |
| JP4533695B2 (ja) | 処置用内視鏡 | |
| WO2007037335A1 (ja) | 縫合器 | |
| JP2000033071A (ja) | 内視鏡治療装置 | |
| JP2002523171A (ja) | 外科手術縫合器具及びその他の使用方法 | |
| JP2008142571A (ja) | 内視鏡用縫合器 | |
| WO1995011630A1 (en) | Retractable suture needle with self-contained driver | |
| EP1859743B1 (en) | Suture instrument | |
| JP4320207B2 (ja) | 内視鏡用切除補助装置 | |
| JP2017006729A (ja) | 内視鏡下外科手術装置及び外套管 | |
| KR102917583B1 (ko) | 내시경 장치 | |
| CN106714703A (zh) | 缝合器 | |
| JP2012024607A (ja) | 縫合器 | |
| US20240299025A1 (en) | Needle holder and method of using same | |
| CN108882931B (zh) | 缝合装置 | |
| JP4445736B2 (ja) | 大腸全層切除の処置用挿入補助具とその医療器具システム | |
| JPH0663052A (ja) | 手術システム | |
| CN103517678A (zh) | 医疗用端口 | |
| WO2021145289A1 (ja) | 内視鏡用縫合糸結紮具および結紮装置 | |
| JP2000201939A (ja) | 医療用処置具 | |
| JP4838946B2 (ja) | 縫合具 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050607 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050607 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20070305 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070417 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070615 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070821 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20071022 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20071127 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20071205 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101214 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101214 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111214 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111214 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121214 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131214 Year of fee payment: 6 |
|
| LAPS | Cancellation because of no payment of annual fees |