JP3935550B2 - 管状観察装置 - Google Patents
管状観察装置 Download PDFInfo
- Publication number
- JP3935550B2 JP3935550B2 JP06861297A JP6861297A JP3935550B2 JP 3935550 B2 JP3935550 B2 JP 3935550B2 JP 06861297 A JP06861297 A JP 06861297A JP 6861297 A JP6861297 A JP 6861297A JP 3935550 B2 JP3935550 B2 JP 3935550B2
- Authority
- JP
- Japan
- Prior art keywords
- observation
- repair
- manipulator
- tubular
- scanning
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000008439 repair process Effects 0.000 claims description 70
- 239000000945 filler Substances 0.000 claims description 59
- 239000000463 material Substances 0.000 claims description 53
- 238000003466 welding Methods 0.000 claims description 32
- 238000005259 measurement Methods 0.000 claims description 27
- 230000000007 visual effect Effects 0.000 claims description 19
- 238000005286 illumination Methods 0.000 claims description 13
- 238000001514 detection method Methods 0.000 claims description 6
- 238000005452 bending Methods 0.000 description 80
- 230000003287 optical effect Effects 0.000 description 48
- 230000006870 function Effects 0.000 description 35
- 238000007689 inspection Methods 0.000 description 26
- 238000007789 sealing Methods 0.000 description 22
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 15
- 230000002093 peripheral effect Effects 0.000 description 15
- 229910052710 silicon Inorganic materials 0.000 description 15
- 239000010703 silicon Substances 0.000 description 15
- 239000000835 fiber Substances 0.000 description 14
- 238000003780 insertion Methods 0.000 description 12
- 230000037431 insertion Effects 0.000 description 12
- 239000012530 fluid Substances 0.000 description 11
- 238000010438 heat treatment Methods 0.000 description 6
- 230000007246 mechanism Effects 0.000 description 6
- 239000002184 metal Substances 0.000 description 6
- 229910052751 metal Inorganic materials 0.000 description 6
- 229910001285 shape-memory alloy Inorganic materials 0.000 description 6
- 235000002505 Centaurea nigra Nutrition 0.000 description 5
- 238000010586 diagram Methods 0.000 description 5
- 238000000034 method Methods 0.000 description 5
- 241001073742 Mylopharodon conocephalus Species 0.000 description 4
- 239000011521 glass Substances 0.000 description 4
- 239000000758 substrate Substances 0.000 description 4
- 239000004809 Teflon Substances 0.000 description 3
- 229920006362 Teflon® Polymers 0.000 description 3
- 239000003795 chemical substances by application Substances 0.000 description 3
- 230000007797 corrosion Effects 0.000 description 3
- 238000005260 corrosion Methods 0.000 description 3
- 230000002950 deficient Effects 0.000 description 3
- 239000011347 resin Substances 0.000 description 3
- 229920005989 resin Polymers 0.000 description 3
- 241000196324 Embryophyta Species 0.000 description 2
- XECAHXYUAAWDEL-UHFFFAOYSA-N acrylonitrile butadiene styrene Chemical compound C=CC=C.C=CC#N.C=CC1=CC=CC=C1 XECAHXYUAAWDEL-UHFFFAOYSA-N 0.000 description 2
- 229920000122 acrylonitrile butadiene styrene Polymers 0.000 description 2
- 239000004676 acrylonitrile butadiene styrene Substances 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 239000011248 coating agent Substances 0.000 description 2
- 238000000576 coating method Methods 0.000 description 2
- 229920002635 polyurethane Polymers 0.000 description 2
- 239000004814 polyurethane Substances 0.000 description 2
- 239000010935 stainless steel Substances 0.000 description 2
- 229910001220 stainless steel Inorganic materials 0.000 description 2
- 238000011179 visual inspection Methods 0.000 description 2
- 240000003323 Centaurea nigra Species 0.000 description 1
- JOYRKODLDBILNP-UHFFFAOYSA-N Ethyl urethane Chemical compound CCOC(N)=O JOYRKODLDBILNP-UHFFFAOYSA-N 0.000 description 1
- 230000003213 activating effect Effects 0.000 description 1
- 239000000654 additive Substances 0.000 description 1
- 230000000996 additive effect Effects 0.000 description 1
- 239000000853 adhesive Substances 0.000 description 1
- 230000001070 adhesive effect Effects 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 238000005266 casting Methods 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 230000007547 defect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000001125 extrusion Methods 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 229920001296 polysiloxane Polymers 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 230000005855 radiation Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 229920002379 silicone rubber Polymers 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 239000010409 thin film Substances 0.000 description 1
Images




















Landscapes
- Length Measuring Devices By Optical Means (AREA)
- Investigating Materials By The Use Of Optical Means Adapted For Particular Applications (AREA)
- Instruments For Viewing The Inside Of Hollow Bodies (AREA)
Description
【発明の属する技術分野】
本発明は、例えばボイラー、タービン、エンジン及びプラント等の内部の傷や腐食等を観察しかつこれらの傷や腐食を補修する管状観察装置に関する。
【0002】
【従来の技術】
例えばボイラー、タービン、エンジン及びプラントの配管等の機器の内部を観察・検査して傷や腐食等の欠陥部位を確認するとともに、この欠陥部位が管端から離れていても機器の内部から溶接等して補修する装置の一例として、特開平6−63787号公報に示されている溶接用内視鏡装置が知られている。
【0003】
上記特開平6−63787号公報に示されている溶接用内視鏡装置は、観察手段を有する内視鏡の先端に、湾曲操作自在なマニピュレータを設け、かつこのマニピュレータの先端に溶接手段を設けることによって、機器の内部の欠陥部位を観察し補修するようになっている。
【0004】
【発明が解決しようとする課題】
上述した特開平6−63787号公報に記載された溶接用内視鏡装置は、欠陥部位の大きさを計測できないため、溶接作業に用いる溶加材の量を適切に決められるものではなかった。このため、特に、微小な傷に対して適切な補修作業を行うことは困難であった。
【0005】
本発明は前記事情に着目してなされたもので、その目的とするところは、微小な傷に対しても適切な量の溶加材を用いて補修作業を行うことができる管状観察装置を提供することにある。
【0006】
【課題を解決するための手段】
本発明の管状観察装置は、前記目的を達成するために、観察機能と照明機能との少なくとも一部を有する硬性ヘッド部を備えた管状観察装置において、レーザ光を出射する出射部と、この出射部のレーザ光の出射角度を走査する走査手段と、前記レーザ光の反射光を検出する検出部からなる計測手段を備えるとともに、前記観察機能の視野範囲を前記計測手段の走査範囲よりも大きくし、前記硬性ヘッド部に配置される補修手段を備えるとともに、前記補修手段の少なくとも先端が、前記観察機能の視野範囲内でかつ前記計測手段の走査範囲の外に位置することを特徴としている。
【0007】
上記管状観察装置は、硬性ヘッド部にレーザ光を出射する等の機能を有する計測手段を設けるとともに、観察機能の視野範囲を計測手段の走査範囲より大きくしたので被検査物に生じた傷の大きさ等を正確に計測できる。
【0008】
【発明の実施の形態】
以下、本発明の各実施の形態を図面に基づいて説明する。
図1〜図14は第1の実施形態を示し、図1は本発明の第1の実施形態の管状観察装置1の挿入部81の斜視図を示し、図2は管状観察装置1のコントロール部80の構成を示したものである。
【0009】
被検査物の機器の内部を観察・補修する管状観察装置1は、図1に示すように、細長に形成されかつ先端側から機器の内部に挿入される挿入部81と、図2に示すように前記挿入部81の基端部81aに接続しかつ本装置1の各種の操作を行うコントロール部80とを有している。
【0010】
前記挿入部81は先端側から順に、硬性ヘッド部2と、可撓性を有する湾曲部3と、可撓性を有する可撓管部4とを互いに連結した構成となっている。前記湾曲部3は、硬性ヘッド部2を所望の方向に指向させるため、例えば前記硬性ヘッド部2の基端側に連結した第1の湾曲部3aと、この第1の湾曲部3aの基端側に連結した第2の湾曲部3bと、第2の湾曲部3bの基端側に連結した第3の湾曲部3cとから構成されて湾曲自在となっている。
【0011】
前記硬性ヘッド部2は先端面2aに、被検査物の観察に用いる観察窓5と、観察窓5による観察箇所を照らす照明窓6とを設けている。この観察窓5の基端側には図示しないイメージガイドファイバが設けられているとともに、照明窓6の基端側には図示しないライトガイドファイバが設けられている。なおこのイメージガイドファイバとライトガイドファイバは挿入部81の基端部81a(図2に示す)まで延びて形成されている。
【0012】
また、前記硬性ヘッド部2は、その先端面2aに、補修手段としての湾曲自在な一対の補修用マニピュレータ8,8を設けている。一方のマニピュレータ8は、先端に被検査物の傷を補修する補修用デバイスとしてのマイクロ溶接具7を設けており、このマイクロ溶接具7を傷に指向させることができるようになっている。
【0013】
前記硬性ヘッド部2は先端面2aに、傷の大きさを計測する測長手段としてのマイクロ光スキャナ9を設けているとともに、その内部に硬性ヘッド部2の姿勢を検知するマイクロジャイロ10を設けている。
【0014】
図2に示すように、前記コントロール部80は、モニタ40と、光源41と、前記マイクロジャイロ10を制御するジャイロ制御部42と、マイクロ光スキャナ9を制御する光スキャナ制御部43と、マイクロ溶接具7を制御する溶接制御部44と、補修用マニピュレータ8および湾曲部3の駆動を行う駆動制御部45と、駆動制御部45に接続されかつ補修用マニピュレータ8を操作する操作部46と、駆動制御部45に接続されかつ湾曲部3を操作する操作部47とを備えている。
【0015】
前記挿入部81の基端部81aには、イメージガイドファイバと接続した固体撮像素子(charge coupled device:以下CCDと呼ぶ)39が取り付けられている。前記CCD39は前記モニタ40に接続されている。また、ライトガイドファイバは基端部81aから光源41に接続されている。
【0016】
前述した構成によって、観察窓5がとらえた被検査物の状況はイメージガイドファイバとCCD39とを通ってモニタ40に表示されることとなり、光源41から供給される光はライトガイドファイバを通って照明窓6から被検査物の内部に照らしだされることとなる。このように管状観察装置1は、前記観察窓5とイメージガイドファイバとCCD39とモニタ40とによって観察機能を有するとともに、前記照明窓6とライトガイドファイバと光源41とによって照明機能を有することとなる。また光源41は、ライトガイドファイバ等に光を供給する場合と供給しない場合とを切り替えるスイッチ41aを設けている。
【0017】
前記ジャイロ制御部42は、基端部81aに接続しているとともに、スイッチ42aを設けかつこのスイッチ42aを操作することによって瞬時にマイクロジャイロ10のドリフトを補正する機能を有している。
【0018】
前記光スキャナ制御部43は、前記基端部81aとモニタ40とに接続して、マイクロ光スキャナ9が計測した傷の大きさや形状をモニタ40に表示する機能を有している。また、光スキャナ制御部43は、マイクロ光スキャナ9を用いて傷の大きさや形状を計測をする場合と計測しない場合とを切り替えるスイッチ43aを設けている。
【0019】
このスイッチ43aが操作者等によって傷の大きさ等を計測する場合に切り替えられると、略同時に光源41からライトガイドファイバ等に光が供給されなくなる。このように、前記スイッチ43aは、前記光源41aのスイッチ41aより優先して光源41が光を供給する場合と供給しない場合とを切り替える機能を有している。なお前記スイッチ43aは本明細書に記すスイッチ手段を構成している。
【0020】
前記駆動制御部45は、前記基端部81aと前記ジャイロ制御部42とに接続しており、操作部47の後述するスイッチ47bによって湾曲部3が所望の姿勢で保持されると、湾曲部3の姿勢を保つために、マイクロジャイロ10からの信号に基づいて湾曲部3の後述するエアチューブ24a,24b,24cに空気等の加圧された流体を選択的に供給するようになっている。
【0021】
前記操作部46は、補修用マニピュレータ8を所望の方向に湾曲させるハンドル部46aと、補修用マニピュレータ8の姿勢を保持するためのスイッチ46bとを有している。前記操作部47は、湾曲部3を所望の方向に湾曲させるハンドル部47aと、湾曲部3の姿勢を保持するためのスイッチ47bとを有している。
【0022】
前述した構成によって、操作者は操作部46,47のハンドル部46a,47aを操作することによって、補修用マニピュレータ8と湾曲部3とを所望の方向に指向させて、スイッチ46b,47bを用いて、補修用マニピュレータ8と湾曲部3とを所望の姿勢で保持するようになっている。
【0023】
前記マイクロ光スキャナ9は、図3に示すように、例えば可視光等のレーザ光を出射する出射部としての面発光レーザ18と、圧電振動体15と針状部材16と可動部17とからなる走査手段と、検出部としての光の強度を検知する受光素子19a,19bと、前記圧電振動体15等を設けたスキャナ基板9aと、このスキャナ基板9aの外周を包囲する筐体9bとを備えている。
【0024】
前記圧電振動体15は、前記硬性ヘッド部2に取付けられた際に先端面2aに面するようにスキャナ基板9aに設けられている。圧電振動体15は、マイクロ光スキャナ9が硬性ヘッド部2に取付けられ、硬性ヘッド部2の制御回路等によって所望の周波数で振動するようになっている。
【0025】
前記可動部17は、平板状に形成されかつ細長に形成された前記針状部材16によって前記圧電振動体15と連結されて、圧電振動体15の振動によって振動するようになっている。
【0026】
前記面発光レーザ18は、例えば半導体レーザからなり、薄膜状に形成されているとともに可動部17に貼り付けられている。前記受光素子19aは前記面発光レーザ18の周囲に設けられかつ、受光素子19bは前記圧電振動体15の近傍に設けられている。前記面発光レーザ18は、圧電振動体15が振動すると、この振動が針状部材16を伝わって可動部17が振動し、この可動部17とともに振動するようになっている。
【0027】
前記受光素子19a,19bは、例えば公知のPD(フォトダイオード)やPSD(ポジションセンシングデバイス)を用いることができる。
また、マイクロ光スキャナ9の裏面側には電極70が設けられており、この電極70は、前記硬性ヘッド部2に取付けられた際に、硬性ヘッド部2に組み込まれ前記圧電振動体15等を振動させる図示しない制御回路に接続するようになっている。
【0028】
さらに、マイクロ光スキャナ9は、ガラス板71を用いて、前記筐体9bとともに、先端側からマイクロ光スキャナ9のスキャナ基板9aをあたかも蓋をするように構成されている。
【0029】
前記ガラス板71は、硬性ヘッド部2に取り付けられた際に先端側でかつ前記受光素子19aに対応する部分より下側に、光が通らないようにコーティング72が施されている。ガラス板71は、受光素子19bに対応する部分に、光を通しかつ径の小さな略円形状のコーティング72が施されていないピンホール73が設けられている。
【0030】
前述した構成によって、硬性ヘッド部2に組み込まれている図示しない制御回路によって、前記圧電振動体15が振動されると、可動部17が2軸方向の振動を生じ、その振動の度に、面発光レーザ18がレーザ光を出射するので2次元的な走査が行われることとなる。
【0031】
前記受光素子19a,19bがPD(フォトダイオード)によって構成された場合には、出射したレーザ光が被検査物の検査面に当たり、はね返った反射光を受光素子19aが検知して、この反射光の強度を知ることで傷の有無を知ることができる。また、受光素子19bに入る反射光の量により検査面までの距離を測定できる。すなわち、あらかじめ標準距離となる反射光の強度を測定しておくことにより、この値を基準にした位置関係を容易に計測することができる。
【0032】
したがって、受光素子19bによって得られる検査面までの距離と受光素子19aへ入射する光の変化量とを測定すれば傷の大きさを計測することが可能となる。
【0033】
一方、前記受光素子19bがPSD(ポジションセンシングデバイス)によって構成された場合には、受光素子19bが光の入射した位置をわかることから、ガラス板71のピンホール73と受光素子19bの反射光の入射位置との関係により反射光の入射角を計測することができる。
【0034】
この時、圧電振動体15を制御して可動部17を振動させているので、前記圧電振動体15の振動の周波数と可動部15の振れ角との関係をあらかじめ計測しておくことで、対象物までの距離を測定できる。したがって、距離が測定できれば前述したように傷の大きさの計測も可能となる。
【0035】
また、受光素子19bがPD(フォトダイオード)によって構成された場合において、検査面までの距離計測方法として、反射光がピンホール73を通り受光素子19bに入射した時における可動部15の振れ角を計測する別の方法を示す。
【0036】
圧電振動体15が駆動していない初期状態を時間t=0として、受光素子19bに対して反射光が入射したときの時間経過を検出することで、受光素子19bに対して入射する角度を測定し、かつピンホール73の位置を考慮して検査面までの距離は三角測量によって計測することができる。
【0037】
つまり、図4に示すように面発光レーザ18から出射した光は、反射の法則に従って検査面83で反射しピンホール73を通った光が受光素子19bに入射する。この時の角度θ(面発光レーザ18と対象物までの最短距離を通る一点鎖線Pと受光素子19bに反射光が入射した際のレーザ光の出射方向を示す二点鎖線Qとのなす角)が前述したように測定できるので、面発光レーザ18に対するピンホール73の位置(図示中のXの値,Yの値)から検査面83までの距離Lを計測することができる。
【0038】
次に、被検査物に傷を発見した後に、この傷を補修する補修手段について説明する。
図5(A)に示すように、一方のマニピュレータ8の先端にマイクロ溶接具7の一例としてのレーザ溶接器を取付けるとともに、他方のマニピュレータ8の先端に溶接に用いる溶加材32を供給する溶加材供給部11を設けている。
【0039】
前記補修用マニピュレータ8の内側には、マニピュレータ8の基端部から先端まで延びた形状記憶合金とこの形状記憶合金を加熱する加熱手段とが設けられ、またはマニピュレータ8の先端から硬性ヘッド部2等の中を通りコントロール部80まで延びたワイヤが設けられている。前記加熱手段によって形状記憶合金を加熱、または操作者がワイヤを手元側等に引くことによって、補修用マニピュレータ8は所望の方向に湾曲されるようになっている。
【0040】
前述した構成によって、図示中の二点鎖線Hに示すように、一対の補修用マニピュレータ8,8を操作して、被検査物の傷にレーザ溶接器の先端と溶加材供給部11の溶加材32の先端とを当接させて、溶接作業を行い傷を補修するようになっている。
【0041】
また、図5(B)に示すように、硬性ヘッド部2の先端面2aに、先端にマイクロ溶接具7の一例としてのレーザ溶接器を取付けた補修用マニピュレータ8を一本のみ設け、溶加材供給部としてのガイド部12を設けても良い。前記ガイド部12は溶加材32を先端面2aの鉛直方向に押し出すようになっている。
【0042】
前記一本のみ設けられた補修用マニピュレータ8は、前述した形状記憶合金またはワイヤ等によって、図示中の二点鎖線Hに示すように、マイクロ溶接具7が溶加材32の先端に当接するように、湾曲自在に構成されている。
【0043】
また、図5(C)に示すように、硬性ヘッド部2の先端面2aに、先端に溶接具14を設けた1本の補修用マニピュレータ8と、このマニピュレータ8に長手方向に沿って固定された溶加材供給部13とを設けることによって、溶加材32が溶接具14の先端の近傍に位置するように構成しても良い。
【0044】
図5(A)に示すように一対の補修用マニピュレータ8,8を設けた場合において、前記マイクロ光スキャナ9の走査範囲と補修用マニピュレータ8と観察窓5の視野範囲との関係を以下に説明する。
【0045】
図6(A)に示すように、補修箇所(傷)20の大きさを計測する際に、マイクロ光スキャナ9の走査範囲N(図示中の二点鎖線S,Sで囲まれる範囲)は、観察窓5の視野範囲M(図示中の二点鎖線K,Kで囲まれる範囲)より小さく包含されている。
【0046】
また、一対の補修用マニピュレータ8,8は、図6(B)に示すように、マイクロ光スキャナ9の走査範囲N外に位置し、かつ少なくともその先端が観察窓5の視野範囲M内に位置するように先端面2aから走査範囲Nの外側に向かって設けられている。なお、図6(B)は図6(A)に示した状態のモニタ40の画像を示している。
【0047】
前記湾曲部3は、図7(A)〜(B)に示すように、伸縮性を有するマルチルーメンチューブ23と、このマルチルーメンチューブ23の内側に設けられた管路としてのエアチューブ24等から構成されている。前記マルチルーメンチューブ23は、略中央に正面からみて円形に形成された貫通孔としての中央ルーメン21と、この中央ルーメン21の周方向に複数形成されかつ正面からみて複数の円弧によって形成された貫通孔としての周ルーメン22とを有している。なお前記周ルーメン22は、前記中央ルーメン21を中心として周方向に等間隔の位置に設けられている。
【0048】
エアチューブ24は、前記ルーメン21、または、ルーメン22の内側でかつ前記湾曲部3の長手方向に沿って設けられている。図示例において、前記湾曲部3は先端側から第1の湾曲部3a、第2の湾曲部3b、第3の湾曲部3cとなるように、3つに分割されている。
【0049】
次に、前記マルチルーメンチューブ23とエアチューブ24との固定状態を図8(A)〜(D)を用いて説明する。なお、図8(A)〜(D)は、図7(B)に示す前記周ルーメン22の内側にエアチューブ24を設けた場合を示している。
【0050】
まず、最も先端側に位置する第1の湾曲部3aのマルチルーメンチューブ23とエアチューブ24(24a)との固定状態を図8(A)〜(B)に示す。図8(A)に示すように、各々の周ルーメン22にエアチューブ24aが1本ずつ挿入され、この周ルーメン22の内側に沿って形成された封止部材25を各々の周ルーメン22に圧入する。
【0051】
そして、図8(B)に示すように、封止部材25と周ルーメン22等との隙間26に対してシリコン充填剤等を充填して、エアチューブ24aと周ルーメン22とを互いに密着して第1の湾曲部3aのチューブ23とエアチューブ24aとを固定するとともに、周ルーメン22を密閉している。また中央ルーメン21の内部には、この中央ルーメン21がつぶれないようにリング部材61が設けられている。
【0052】
次に、第2の湾曲部3bのマルチルーメンチューブ23とエアチューブ24との固定状態を図8(C)に示す。各々の周ルーメン22は、図8(C)に示すように、前記第1の湾曲部3aに固定されたエアチューブ24aを通している。
【0053】
第2の湾曲部3bの基端側において、各々の周ルーメン22は、前記エアチューブ24aとともに第2の湾曲部3bを湾曲するためのエアチューブ24bとを挿入し、前述した第1の湾曲部3aの場合と同様に封止部材25を圧入している。
【0054】
さらに、前記周ルーメン22は、封止部材25との隙間26にシリコン充填剤等を充填されてエアチューブ24a,24bと固定されるとともに密閉されている。また、前記第2湾曲部3bの先端側の周ルーメン22も、封止部材25とシリコン充填剤とによってエアチューブ24aを密着するとともに密閉されている。
【0055】
前記第3の湾曲部3cのマルチルーメンチューブ23とエアチューブ24との固定状態を図8(D)に示す。第3の湾曲部3cの基端側において、周ルーメン22は、各々第1および第2の湾曲部3a,3bに固定されたエアチューブ24a,24bと第3の湾曲部3cを湾曲させるためのエアチューブ24cを3本ずつ挿入している。このため、合計9本のエアチューブ24が第3の湾曲部3cの基端側から出ている。
【0056】
図8(D)のように、それぞれの周ルーメン22に対して2つに分割された封止部材25a,25bとシリコン充填剤等によりエアチューブ24a,24b,24cを周ルーメン22に固定するとともに周ルーメン22を密閉している。この時、2つの封止部材25a,26bは、3本のエアチューブ24a,24b,24cで挟むような配置(ほぼ等間隔)となっている。また第3の湾曲部3cの先端側も封止部材25とシリコン充填剤等によってエアチューブ24a,24bと周ルーメン22を固定するとともに周ルーメン22を密閉している。なお、前記封止部材25とシリコン充填剤とは本明細書に記す接続手段を構成している。
【0057】
前記エアチューブ24a,24b,24cは、前述したように湾曲部3a,3b,3cに一端が固定されるとともに、他端がコントロール部80まで延びて形成されかつコントロール部80の駆動制御部45等の流体源に接続している。なお、前記エアチューブ24a,24b,24cと封止部材25とシリコン充填剤とは本明細書に記した流体供給手段を構成している。
【0058】
前述した構成によって、操作部47のハンドル部47aを操作することによって、駆動制御部45等の流体源がエアチューブ24a,24b,24cに選択的に流体を供給する。そして、マルチルーメンチューブ23が伸縮性を有するので湾曲部3が所望の方向に湾曲するとともに硬性ヘッド2部が所望の方向に指向することとなる。
【0059】
なお、図7(A)は前記エアチューブ24を中央ルーメン21に設けた事以外は前述した図8(A)〜(D)と同様な構成となっている。
また、前記第1の湾曲部3aと第2の湾曲部3bの間、第2の湾曲部3bと第3湾曲部3cの間には、図9(A)及び図10(A)に示すように、連結部材27,82が設けられて、前記湾曲部3a,3b、3cは互いに連結されている。
【0060】
連結部材27は、図9(B)に示すように、内径が略湾曲部3a,3b,3cの外径と略同寸法に形成され、かつ金属からなるリング状に形成されている。この連結部材27は、図9(A)に示すように、第1の湾曲部3aの基端側と第2の湾曲部3bの先端側とを連結した後、接着材等によって前記第1の湾曲部3aと第2の湾曲部3bとに固定されることによって、第1の湾曲部3aと第2の湾曲部3bとを互いに固定している。前記第2の湾曲部3bと第3の湾曲部3cとの間も同様に固定している。
【0061】
連結部材82は、図10(B)に示すように、略中央に前記中央ルーメン21と略同形のルーメン85を形成しかつ前記エアチューブ24を第1の湾曲部3aから第2の湾曲部3bへとまたは第2の湾曲部3bから第3の湾曲部3cへと挿通する孔86を設けている。この連結部材82は、第1の湾曲部3aと第2の湾曲部3bとが互いに直線となるように配置された後、この第1の湾曲部3aと第2の湾曲部3bとの間にシリコン充填剤等を充填して得られる構成となっている。前記第2の湾曲部3bと第3の湾曲部3cとの間に設けられる連結部材82も同様な方法によって得られる。
【0062】
前述した封止部材25、エアチューブ24、リング部材61、連結部材27,82を構成する材質は、以下に示すとおりである。
湾曲部3を構成するマルチルーメンチューブ23はシリコン、ポリウレタン等の柔軟で伸縮性を有する材質から得られる。前記封止部材25はシリコン、テフロン、ポリウレタン等の樹脂やステンレス等の金属から得られる。エアチューブ24とテフロンリング部材61はステンレス等の金属やテフロン等の樹脂から得られる。前記連結部材27,82はシリコン剤で固めたり、熱収縮チューブを用いたり、または金属等から得ることができる。
【0063】
次に、図5(A)に示すように、一対の補修用マニピュレータ8,8を設けた場合において、管状観察装置1の硬性ヘッド部2から溶加材32を送り出す機構(溶加材突出機構)84について図13〜図14を用いて説明する。
【0064】
前記溶加材突出機構84は、図13(A)に示すように、一方の補修用マニピュレータ8の内部に、硬性ヘッド部2の内部を通り可撓管部4(挿入部81)の基端部81a側まで延びて形成されかつマニピュレータ8の先端に開口する内チューブ35を設けている。
【0065】
前記一方のマニピュレータ8の内部に位置する内チューブ35の内部には、図13(B)に示すように、この内チューブ35の長手方向に沿って複数に分割された溶加材32が挿入されている。前記硬性ヘッド部2の内部に位置する内チューブ35の内部には、可撓管部4の基端部81a側から硬性ヘッド部2の先端面2a付近まで伸びて形成され、かつ最も基端側に位置する溶加材32に当接するとともに、この内チューブ35内を進退するワイヤ33が設けられている。なお、このワイヤ33は、本明細書に記した供給手段を構成している。
【0066】
また、前記内チューブ35は、図13(B)に示すように、前記一方の補修用マニピュレータ8の外皮を形成する外チューブ34によって包囲されている。
前記内チューブ35に挿入された溶加材32は、図14に示すように一端が放射状に広がって弾性を有するばね部32aを有した円筒状に形成されている。
【0067】
前記一方の補修用マニピュレータ8の先端には、口金36が取付られている。この口金36の中央には貫通孔88が設けられており、溶加材32はばね部32aの弾性により、口金36の貫通孔88の内面に係止して固定される。
【0068】
前述した構成により、前記溶加材突出機構84は、溶接作業を行って、貫通孔88から突出している溶加材32が無くなったら、ワイヤ33を押して、次の溶加材32を貫通孔88から押し出す。このような工程を繰り返すことにより、常に溶加材32を送り出すことが可能となる。
【0069】
このように、溶加材32が補修用マニピュレータ8の内部において分割されているので、補修用マニピュレータ8の湾曲を妨げることがない。したがって、確実に被検査物の補修を行うことができるとともに、硬性ヘッド部2の小型化を図ることが可能となる。
【0070】
次に前述した管状観察装置1を用いた被検査物の観察及び修復方法について説明する。
まず、操作者は、複雑な形状をした機器の内部に管状観察装置1の硬性ヘッド部2を所望の検査箇所まで挿入するために、操作部47のハンドル部47aを操作しながら湾曲部3a,3b,3cを所望の方向に湾曲させるとともに、基端部81a側より硬性ヘッド部2等を押し込む操作をする。
【0071】
硬性ヘッド部2等が所望の検査箇所まで到達した後、観察窓5を通してCCD39に撮像した画像をモニタ40に表示して目視検査を行なう。この目視検査の間、光源41は、スイッチ41aによってライトガイドファイバに光を供給し続け照明窓6から検査箇所を照らしている。
【0072】
操作者が、傷20を発見すると、操作部47のハンドル部47aを操作して、湾曲部3を湾曲させて硬性ヘッド部2の位置及び姿勢を決め、その後、スイッチ47bを用いて姿勢を保持する。すると硬性ヘッド部2の姿勢はマイクロジャイロ10が検出する信号に基づいて保持されることとなる。
【0073】
この姿勢を保持した状態で、傷20の大きさをマイクロ光スキャナ9を用いて計測する。光スキャナ制御部43のスイッチ43aを用いてマイクロ光スキャナ9を作動状態にすると、図11に示す時間T1のように、同時に光源41からの光の供給が停止される。なお、図示中の時間T0のように光源41が作動状態にあるときはスキャナ9は非作動状態にあって、マイクロ光スキャナ9が作動状態になると、光源41はスキャナ9の走査を妨げないように非作動状態になる。
【0074】
光スキャナ制御部43は、マイクロ光スキャナ9の圧電振動体15を振動させ、その振動を針状部材16を介して可動部17に伝達させ面発光レーザ18をも振動させながら、面発光レーザ18からレーザを出射して傷20の大きさ等を計測する。
【0075】
傷20の大きさを計測した後、操作部46のハンドル部46aを操作して補修用マニピュレータ8を制御しながら、傷20の大きさに応じた溶接作業を行う。この作業はモニタ40により観察しながら進められる。
【0076】
傷20が小さい時には、溶加材32を用いずにマイクロ溶接具7を用いて傷20の近傍を融かして溶接作業を行って補修し、傷20が大きい場合には溶加材供給部11により溶加材32を供給し、この溶加材32をマイクロ溶接具7により溶融させて被検査物とともに補修する。
【0077】
なお、傷20の大きさを計測する際は、図6に示すように補修用マニピュレータ8は非作動の状態でかつ先端面2aから走査範囲Nの外側に向かっているのでマイクロ光スキャナ9の計測を妨げることはない。
【0078】
また、このマイクロ光スキャナ9による走査範囲Nは、図6(B)に示すように観察窓5の視野範囲M内にあるので、操作者は計測状況を確実に把握することができる。また補修作業時には、補修用マニピュレータ8がマイクロ光スキャナ9の計測範囲内に入ってしまうが、このときは傷20を計測していないので特に問題とならない。
【0079】
また、管状観察装置1は、補修用マニピュレータ8を取り外して機器の内部のを観察と傷20の計測とを行うだけの場合においても、図12に示すように、観察窓5の視野範囲M内にマイクロ光スキャナ9の走査範囲Nが設けられているので、傷20の大きさを確実に計測できるとともに、操作者は計測状況を確実に把握することができる。
【0080】
本実施形態によれば、マイクロ光スキャナ9の走査範囲Nを観察窓5の視野範囲M内に設け、かつ補修用マニピュレータ8がマイクロ光スキャナ9の走査を妨げることがないので、確実に傷20の大きさを計測することができる。したがって、微小な傷20に対しても、適切な量の溶加材32を用いて適切でかつ効率の良い補修作業ができる。
【0081】
図15は第2の実施形態を示し、第1の実施形態と同一構成部分は同一符号をい付して説明を省略する。
本実施形態において、硬性ヘッド部2の先端面2aには、図15(A)〜(B)に示すように、マイクロ光スキャナ9をはさんだ2ヵ所に可視光であるレーザ光を導光する位置指示手段としてのスポット28が設けられている。図15(A)は補修用マニピュレータ8を取り外した場合を示し、図15(B)は補修用マニピュレータ8を取付けた場合を示している。
【0082】
前述した構成により、傷20の大きさを計測するとき、管状観察装置1は、観察窓5の視野範囲M内(図示中の二点鎖線K,Kで囲まれた範囲)の中心に対する略対称の2ヵ所の位置に、レーザ光(図示中の二点鎖線O)を導光している。
【0083】
このレーザ光Oは可視光であるため、計測を行う傷20をこのレーザ光O,Oの間に位置するように、硬性ヘッド部2の姿勢を保持することができる。そしてマイクロ光スキャナ9の面発光レーザ18を用いて、観察窓5により観察しながら傷20の大きさを計測する。
【0084】
本実施形態によれば、可視光であるレーザ光O,Oを用いて傷20を確実に観察窓5の視野範囲M内に捕らえながら計測できるので、迅速で正確に傷20の大きさを計測できる。
【0085】
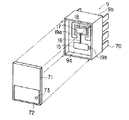
図16は第3の実施形態を示し、第1の実施形態と同一構成部分は同一符号をい付して説明を省略する。ここでは、マルチルーメンチューブ23の製造方法を示し、封止部材29をエアチューブ24と一体に成形している。
【0086】
マルチルーメンチューブ23は、押出成形または、型30を用いた注型によってエアチューブ24と一体または別体で成形される。図16に示すように、この型30はマルチルーメンチューブ23の長手方向に沿って2つに分割されている。
【0087】
封止部材29は、マルチルーメンチューブ23を前述した方法によって成形した後、図16(A)に示すように、前記型30内にマルチルーメンチューブ23を設け、このマルチルーメンチューブ23の一方の端面側30aに、例えばシリコン剤87等のチューブ23と同じ材質を注入して固めて形成される。
【0088】
また、他方の端面側30bにおいては、図16(A)に示すように、エアチューブ24とマルチルーメンチューブ23とが一体に成形された状態、またはエアチューブ24とマルチルーメンチューブ23とが別体で形成された場合には周ルーメン22の各々にエアチューブ24を差し込んだ状態で、シリコン剤87を注入して封止部材29を形成する。
【0089】
マルチルーメンチューブ23及び封止部材29が、型30内に収まっている状態は、図16(B)に示すようになっている。また、マルチルーメンチューブ23とエアチューブ24とが互いに別体で成形された場合には、図16(C)に示すように、マルチルーメンチューブ23と、他方の端面側30bにエアチューブ24と一体に成形された封止部材29と、一方の端面側30aに成形された封止部材29とからなる構成となる。
【0090】
なお、マルチルーメンチューブ23の両端に設けられる封止部材29は、前述したシリコンの他にABS(Acrylonitrile butadiene styrene)やウレタン等の樹脂を用いて成形しても良い。
【0091】
図17は第4の実施形態を示し、第1の実施形態と同一構成部分は同一符号をい付して説明を省略する。
本実施形態において、管状観察装置1は、硬性ヘッド部2に設けられた補修用マニピュレータ8等の操作を行う各種のスイッチを可撓管部4(挿入部81)の基端部81aの一部に設けている。
【0092】
図17に示すように、光スキャナ制御部43のスイッチ48と、マイクロジャイロ10のドリフトを補正するジャイロ制御部42のスイッチ49と、湾曲部3a,3b,3cの湾曲操作を行うスイッチ50と、補修用マニピュレータ8の操作を行うスイッチ51とを、前記基端部81aの一部に設けている。
【0093】
前述した構成によれば、補修用マニピュレータ8等の操作等を行う各種のスイッチを可撓管部4の基端部81aの一部に設けたので、操作者は容易に各種の操作を行うことができる。
【0094】
図18は第5の実施形態を示し、第1の実施形態と同一構成部分は同一符号をい付して説明を省略する。本実施形態において、管状観察装置1は、コントロール部80の例えば光スキャナ制御部43等の複数の制御部を一つの制御装置52にまとめて構成している。
【0095】
図18に示すように、イメージガイドケーブルを含むケーブル54と、ライトガイドケーブルを含むケーブル55と、マイクロ光スキャナ9とマイクロジャイロ10との駆動信号用ケーブルと湾曲部3と補修用マニピュレータとの駆動ケーブルとマイクロ溶接具7の信号ケーブル(レーザファイバやTIG溶接電源ケーブル)とをまとめて1つにしたケーブル56とが、可撓管部4(挿入部81)の基端部81aからコネクタ60を介して制御装置52に接続している。さらに、この制御装置52には操作装置53が接続している。
【0096】
前記制御装置52は、マイクロ光スキャナ9の制御を行う光スキャナ制御部43と、マイクロジャイロ10の制御を行うジャイロ制御部42と、湾曲部3及び補修用マニピュレータ8の駆動を制御する駆動制御部45と、マイクロ溶接具7を制御する溶接制御部44と、光をライトガイドケーブルに供給する光源41とを備えている。
【0097】
前記操作装置53は、制御装置52が備えた制御部42,43,44,45等の操作を行う機能を有している。操作装置53は、湾曲部3および補修用マニピュレータ8の湾曲方向を操作するハンドル53a,53bと、湾曲部3および補修用マニピュレータ8の姿勢を保持するスイッチ53g,53hと、マイクロ溶接具7を制御するボリューム53cと、マイクロ光スキャナ9の作動・非作動を切り替えるスイッチ53dと、マイクロジャイロ10のドリフトを瞬時に補正する補正スイッチ53eとを有しかつ、前述したそれぞれの機能の状態を表示する液晶モニタ53fを備えている。
【0098】
前述した構成によれば、ケーブルの本数が減少し、かつ複数の制御部42,43,44,45等を制御装置52と操作装置53とにまとめたので、管状観察装置1は小型化が可能となって、狭い場所にも設置できるようになる。
【0099】
図19は第6の実施形態を示し、第1の実施形態と同一構成部分は同一符号をい付して説明を省略する。
本実施形態において、管状観察装置1は、マイクロ光スキャナ9の走査範囲Nを変化させる走査角制御部58を設けるとともに、管状観察装置1が有する観察機能にその焦点(視野範囲M)を切り替え可能な拡大観察手段を有している。
【0100】
図19に示すように、管状観察装置1は、観察窓5の焦点(視野範囲M1,M2)を光学的または機械的手段によって連続的にまたは2段階に切り替え可能な拡大観察手段としての観察制御部57と、この観察制御部57と連動してマイクロ光スキャナ9の走査範囲N1,N2を変化させる走査角制御部58とを備えている。
【0101】
走査角制御部58は、例えばマイクロ光スキャナ9の圧電振動体15の振動周波数を変更できるようになっている。走査角制御部58は、観察制御部57が傷20を拡大して観察するために観察窓5の焦点を変更して観察窓5の視野範囲Mを狭めるのと連動して、圧電振動体15の振動周波数を変更してマイクロ光スキャナ9の走査範囲Nを狭めるようになっている。
【0102】
また、前記観察制御部57を観察窓5によってとらえた画像を処理しかつ画像の任意に指示した範囲を拡大・縮小するように構成して、前記走査角制御部58を前述したように連動するようにしても良い。
【0103】
前述した構成によれば、図19(A)に示すように、比較的広い視野範囲M1(図示中の二点鎖線K,Kで囲まれる範囲)で被検査物を観察し、比較的広い走査範囲N1(図示中の二点鎖線S,S)でマイクロ光スキャナ9を用いて傷20の大きさを計測している場合から、傷20を拡大して観察するために観察制御部57を操作する。すると、図19(B)に示すように、前記比較的広い視野範囲M1から比較的狭い視野範囲M2へと切り替わる。
【0104】
そして、走査制御部58がこの視野範囲M1,M2の切り替えに連動して、圧電振動体15の周波数を変更し可動部17の振動周波数を切り替えて、マイクロ光スキャナ9を比較的狭い走査範囲N2へと切り替えることとなる。なお、図19(B)に示された場合においても、マイクロ光スキャナ9の走査範囲N2は、観察窓5の視野範囲M2内に位置するようになっている。
【0105】
また、観察窓5の視野範囲Mを2段階に切り替えるように構成して、コントロール部80にこの視野範囲Mを切り替えるスイッチを設け、この2つの視野範囲Mに応じて、マイクロ光スキャナ9の走査範囲Nを2段階に切り替えるように構成しても良い。
【0106】
本実施形態によれば、被検査物の観察において、より詳細に観察するために被検査物の画像を拡大しながら傷の大きさを計測する場合に、わざわざ拡大した画像をもとの縮小した画像に戻して計測する必要がなくなるので、作業の効率が向上することとなる。
【0107】
図20は第7の実施形態を示し、第1の実施形態と同一構成部分は同一符号を付して説明を省略する。本実施形態において、溶加材32を硬性ヘッド部2の先端面2aにはめこむ構成となっている。
【0108】
図20に示すように、硬性ヘッド部2は、先端面2aの略中央に、棒状に形成された溶加材32を先端側から嵌込むための孔89を設けており、この孔89に溶加材32を嵌込むことによって、溶接作業を行なうようになっている。
【0109】
前述した構成によれば、溶加材32が無くなったら、管状観察装置1の硬性ヘッド部2を被検査物の内部から抜いて、再度、溶加材32を前記孔89に嵌込む。溶接作業を行なう傷は微小であることが多く一度に多量の溶加材を用いないため、確実に溶接作業を行って被検査物の補修を行うことができる。
【0110】
本実施形態によれば、溶加材32は硬性ヘッド部2の先端面2aに設けられたの孔89に嵌込まれているので、補修用マニピュレータ8の湾曲を妨げることがない。したがって、確実に被検査物の補修を行うことができるとともに、硬性ヘッド部2の小型化を図ることが可能となる。
【0111】
図21は第8の実施形態を示し、第1の実施形態と同一構成部分は同一符号を付して説明を省略する。本実施形態において、溶加材32は把持部38によって引張り出されるようになっている。
【0112】
図21に示すように、一方の補修用マニピュレータ8には、先端に開口する貫通孔37が設けられている。溶加材32は、マニピュレータ8の長手方向に沿って複数に分割されて前記一方のマニピュレータ8の内部に挿入されている。
【0113】
溶加材32は前記一方のマニピュレータ8の内部に一つずつ基端側から押し込まれても良く、または空気等の加圧された流体によって先端側に送りだされるようにしても良い。他方のマニピュレータ8の先端には、コントロール部80から開閉操作可能でかつ溶加材32を挟むことが可能な把持部38が設けられている。
【0114】
前述した構成によれば、操作者は、コントロール部80から観察窓5が観察するモニタ40の画像を見ながら、マニピュレータ8の先端が互いに接近するように操作する。そして、把持部38を用いて溶加材32を挟んで引張り出して、溶接作業を行う。
【0115】
本実施形態によれば、溶加材32が補修用マニピュレータ8の内部で分割しているので、補修用マニピュレータ8の湾曲を妨げることがない。したがって、確実に被検査物の補修を行うことができるとともに、硬性ヘッド部2の小型化を図ることが可能となる。
【0116】
前述した実施形態によれば、次の構成が得られる。
(付記1)先端に観察機能と照明機能とを有する硬性ヘッド部と、前記硬性ヘッド部の基端側に連結する湾曲部とを有する細長の可撓性の挿入部を備えた管状観察装置において、レーザ光を出射する出射部と、前記出射部のレーザ光の出射角度を走査する走査手段と、前記レーザ光の反射光を検出する検出部からなる測長手段を前記硬性ヘッドに設けるとともに、前記観察機能の視野範囲を前記測長手段の走査範囲よりも大きくしたことを特徴とする管状観察装置。
(付記2)前記硬性ヘッド部に配置されかつ湾曲自在な補修用マニピュレータと、前記補修用マニピュレータの先端に設けられた補修用デバイスとを具備するとともに、前記補修用マニピュレータの少なくとも先端が、前記観察機能の視野範囲内でかつ前記測長手段の走査範囲外に位置することを特徴とする付記1記載の管状観察装置。
(付記3)前記補助用マニピュレータの内部に、形状記憶合金と、前記形状記憶合金を加熱する加熱手段とを具備することを特徴とする付記2記載の管状観察装置。
(付記4)前記測長手段の計測位置を示す位置指示手段を具備することを特徴とする付記1記載の管状観察装置。
(付記5)前記位置指示手段は、前記測長手段を挟むように前記硬性ヘッド部に少なくとも2つ配置されたことを特徴とする付記4記載の管状観察装置。
(付記6)前記位置指示手段は、可視光からなるスポット光であることを特徴とする付記4記載の管状観察装置。
(付記7)前記観察機能に拡大観察手段を設け、前記拡大観察手段に連動して前記測長手段のレーザ光の出射方向を制御する走査角制御部を具備することを特徴とする付記1記載の管状観察装置。
(付記8)前記測長手段は、圧電振動体と、平板状の可動部と、前記圧電振動体と前記可動部とを連結する針状部材と、前記圧電振動体に貼付けられた面発光レーザと、受光素子とからなり、前記走査角制御部は、前記圧電振動体の周波数を変化させることを特徴とする付記7記載の管状観察装置。
(付記9)前記測長手段のレーザ光は、可視光であることを特徴とする付記1記載の管状観察装置。
(付記10)前記湾曲部は、複数の貫通孔を有する伸縮性チューブと、前記チューブの複数の貫通孔に対して選択的に流体を供給する流体供給手段とからなることを特徴とする付記1記載の管状観察装置。
(付記11)前記流体供給手段は、流体源に接続する管路と、前記管路と前記チューブの貫通孔とをシールしながら接続する接続手段とからなることを特徴とする付記10記載の管状観察装置。
(付記12)前記接続手段は、前記チューブの貫通孔に圧入される封止部材と、前記チューブの貫通孔内に挿入された前記封止部材と前記管路と貫通孔との隙間を埋めるシリコン充填材とからなることを特徴とする付記11記載の管状観察装置。
(付記13)前記チューブと前記管路を一体的に形成したことを特徴とする付記11記載の管状観察装置。
(付記14)前記チューブは、シリコンゴムからなることを特徴とする付記10記載の管状観察装置。
(付記15)前記測長手段の作動・非作動のスイッチ機能と、照明機能の作動・非作動のスイッチ機能とを兼ねるスイッチ手段を設けたことを特徴とする付記1記載の管状観察装置。
(付記16)先端に観察機能と照明手段とを有する硬性ヘッド部と、前記硬性ヘッド部に設けられかつ湾曲自在な補修手段と、前記硬性ヘッド部の基端側に連結する湾曲部と、前記湾曲部の基端側に連結する細長の可撓性の挿入部を備えた管状観察装置において、前記補修手段の内部に複数に分割された溶接用の溶加材と、前記溶加材を前記補修手段の先端に突出させる溶加材突出機構とを設けたことを特徴とする管状観察装置。
(付記17)前記溶加材の一部に、弾性を有し前記補修手段の内部に係止するばね部を設けたことを特徴とする付記16記載の管状観察装置。
(付記18)前記溶加材を基端側から先端側に供給する供給手段を設けたことを特徴とする付記項16記載の管状観察装置。
【0117】
付記1〜付記15によれば、管状観察装置は、硬性ヘッド部にレーザ光を出射する測長手段を設けるとともに、観察機能の視野範囲を測長手段の走査範囲より大きくしたので被検査物に生じた傷を正確に計測できる。
【0118】
付記2及び付記3によれば、被検査物の傷を補修する補修用マニピュレータのすくなくとも先端が、観察機能の視野範囲内でかつ測長手段の走査範囲外に位置しているので、操作者は補修箇所を見ながら正確かつ効率的な補修作業を行うことができる。
【0119】
付記4〜付記6によれば、測長手段の計測位置を示す位置支持手段を有しているので、測長手段の計測箇所を正確に知ることができる。
付記7及び付記8によれば、観察機能に拡大観察手段を設けかつ、測長手段にレーザ光の走査角を前記拡大観察手段に連動して制御する走査角制御部を設けたので、観察機能の拡大観察時においても、容易に測長手段の走査範囲を変更することができる。
【0120】
付記9によれば、測長手段が出射するレーザ光は可視光であるため、測長手段の計測箇所を正確に知ることができる。
付記10〜付記14によれば、湾曲部の伸縮性チューブの貫通孔に選択的に流体を供給することによって、硬性ヘッド部を所望の方向に湾曲させることができるので、観察機能の視野範囲と測長手段の計測範囲とを所望の方向に指向させることができる。
【0121】
付記15によれば、スイッチ手段が、測長手段と照明機能とのスイッチ機能とを兼ねているので、測長手段がレーザ光を出射する際は照明機能を非作動にして、確実に測長手段による計測を行うことができる。
【0122】
付記16〜付記18によれば、溶加材が複数に分割されかつ補修手段の内部に設けられているので、被検査物の傷の大きさ応じて適切な量の溶加材を用いて、補修作業を行うことができる。したがって、作業が効率的であるとともに微小な傷に対する補修作業を確実に行うことができる。
【0123】
また、溶加材を補修手段の内部に複数に分割して設けているので、溶加材が補修手段の湾曲の妨げとならない。したがって、補修手段に比較的小さな力しか必要とされないため、硬性ヘッド部の小型化をはかることが可能となる。
【0124】
【発明の効果】
本発明によれば、硬性ヘッド部にレーザ光を出射する等の機能を有する計測手段を設けるとともに、観察機能の視野範囲を計測手段の走査範囲より大きくしたので被検査物に生じた傷の大きさ等を正確に計測できる。したがって、特に微小な傷に対しても適切な量の溶加材を用いて補修作業を行うことができる。
【図面の簡単な説明】
【図1】本発明の第1の実施形態の管状観察装置の挿入部の斜視図。
【図2】同実施形態の管状観察装置の全体の構成を示す図。
【図3】同実施形態のマイクロ光スキャナを示す図。
【図4】図4に示されたマイクロ光スキャナの測長状況を示す図。
【図5】同実施形態の補修用マニピュレータを示す図。
【図6】同実施形態のマイクロ光スキャナの走査範囲と観察窓の視野範囲と補修用マニピュレータの位置関係を示す図。
【図7】同実施形態の湾曲部の分解斜視図。
【図8】同実施形態の湾曲部の構成を示す斜視図。
【図9】同実施形態の湾曲部の連結状態を示す斜視図。
【図10】同実施形態の湾曲部の連結状態を示す斜視図。
【図11】同実施形態の光源とマイクロ光スキャナの作動状態を示す図。
【図12】同実施形態のマイクロ光スキャナの走査範囲と観察窓の視野範囲との位置関係を示す図。
【図13】同実施形態の溶加材突出機構を示す図。
【図14】同実施形態に用いられる溶加材の側面図。
【図15】この発明の第2の実施形態を示す管状観察装置の硬性ヘッド部の斜視図。
【図16】この発明の第3の実施形態を示すマルチルーメンチューブと封止部材を示す斜視図。
【図17】この発明の第4の実施形態を示す管状観察装置の示す図。
【図18】この発明の第5の実施形態を示すコントロール部を示す図。
【図19】この発明の第6の実施形態を示す硬性ヘッド部の斜視図。
【図20】この発明の第7の実施形態を示す硬性ヘッド部の斜視図。
【図21】この発明の第8の実施形態を示す硬性ヘッド部の斜視図。
【符号の説明】
1…管状観察装置
2…硬性ヘッド部
3…湾曲部
5…観察窓(観察機能)
6…照明窓(照明機能)
9…マイクロ光スキャナ(測長手段)
15…圧電振動体(走査手段)
16…針状部材(走査手段)
17…可動部(走査手段)
18…面発光レーザ(出射部)
19a…受光素子(検出部)
19b…受光素子(検出部)
39…CCD(観察機能)
40…モニタ(観察機能)
41…光源(照明機能)
81…挿入部
Claims (5)
- 観察機能と照明機能との少なくとも一部を有する硬性ヘッド部を備えた管状観察装置において、
レーザ光を出射する出射部と、この出射部のレーザ光の出射角度を走査する走査手段と、前記レーザ光の反射光を検出する検出部からなる計測手段とを備えるとともに、前記観察機能の視野範囲を前記計測手段の走査範囲よりも大きくし、
前記硬性ヘッド部に配置される補修手段を備えるとともに、前記補修手段の少なくとも先端が、前記観察機能の視野範囲内でかつ前記計測手段の走査範囲の外に位置することを特徴とする管状観察装置。 - 前記照明機能を前記計測手段と連動させて制御することを特徴とする請求項1に記載の管状観察装置。
- 前記走査手段の走査範囲を変化させる走査角制御手段を備えたことを特徴とする請求項1または2に記載の管状観察装置。
- 前記補修手段は、被検査物に溶接を行う補修用マニピュレータであることを特徴とする請求項1ないし請求項3のいずれか1に記載の管状観察装置。
- 前記補修用マニピュレータは、先端に溶接具を設けた第1のマニピュレータと、先端に溶接に用いる溶加材を供給する溶加材供給部を設けた第2のマニピュレータとを備えていることを特徴とする請求項4に記載の管状観察装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP06861297A JP3935550B2 (ja) | 1997-03-21 | 1997-03-21 | 管状観察装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP06861297A JP3935550B2 (ja) | 1997-03-21 | 1997-03-21 | 管状観察装置 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006200995A Division JP2006313172A (ja) | 2006-07-24 | 2006-07-24 | 管状観察装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPH10267634A JPH10267634A (ja) | 1998-10-09 |
| JP3935550B2 true JP3935550B2 (ja) | 2007-06-27 |
Family
ID=13378772
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP06861297A Expired - Fee Related JP3935550B2 (ja) | 1997-03-21 | 1997-03-21 | 管状観察装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3935550B2 (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8423110B2 (en) * | 2002-01-09 | 2013-04-16 | Boston Scientific Scimed, Inc. | Imaging device and related methods |
| JP2004275542A (ja) | 2003-03-17 | 2004-10-07 | Olympus Corp | カプセル型内視鏡 |
| US9913570B2 (en) | 2015-08-07 | 2018-03-13 | Enlightenvue Llc | Endoscope with variable profile tip |
| JP2018179501A (ja) * | 2017-04-03 | 2018-11-15 | 日本精工株式会社 | 近接覚センサ |
| AU2018290908A1 (en) * | 2017-06-30 | 2020-02-20 | Enlightenvue Llc | Endoscopy systems and methods of use thereof |
| US10687698B2 (en) | 2018-09-12 | 2020-06-23 | Enlightenvue Llc | Direct endoluminal- and/or endovascular-illumination systems and methods of use thereof |
-
1997
- 1997-03-21 JP JP06861297A patent/JP3935550B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JPH10267634A (ja) | 1998-10-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5097270B2 (ja) | 圧電アクチュエータによる光ファイバの作動、及び圧電アクチュエータにより生成される電圧の検出 | |
| JP4842518B2 (ja) | 深度制御またはz軸駆動の方法とその装置 | |
| JP5606812B2 (ja) | 内視鏡用ガイドチューブ | |
| JP2000193893A (ja) | 検査用挿入管の屈曲装置 | |
| JP4358494B2 (ja) | 内視鏡システム | |
| JP3898781B2 (ja) | 内視鏡 | |
| JP2010527688A (ja) | 異なる画像取得モードを有する走査ビームデバイス | |
| JP3935550B2 (ja) | 管状観察装置 | |
| CN105852787A (zh) | 内窥镜装置 | |
| JP4088315B2 (ja) | 内視鏡 | |
| JP5173154B2 (ja) | 流体アクチュエータ、および内視鏡 | |
| JP4535842B2 (ja) | 配管検査装置 | |
| JP2006034542A (ja) | 内視鏡とその製造方法、修理方法 | |
| US6895266B1 (en) | Laser light emitter surgical site locating device and method | |
| JPH10146316A (ja) | 内視鏡 | |
| JP2006313172A (ja) | 管状観察装置 | |
| JP4073070B2 (ja) | Tig溶接用内視鏡装置 | |
| CN100471460C (zh) | 超声波内窥镜 | |
| JP3179199B2 (ja) | 管内修理装置 | |
| EP2923631B1 (en) | Endoscope insertion portion and endoscope | |
| JPH04176429A (ja) | 内視鏡 | |
| JP3966405B2 (ja) | 管内観察装置 | |
| JPH06209998A (ja) | 多自由度可撓管 | |
| JPH0667096A (ja) | 内視鏡装置 | |
| JP6975819B2 (ja) | 内視鏡 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20040309 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20040309 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20050818 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20060523 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060724 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20070313 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20070320 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100330 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110330 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110330 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120330 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120330 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130330 Year of fee payment: 6 |
|
| LAPS | Cancellation because of no payment of annual fees |