JP3934159B2 - 学習および試験機能を有する位置確認 - Google Patents
学習および試験機能を有する位置確認 Download PDFInfo
- Publication number
- JP3934159B2 JP3934159B2 JP51445898A JP51445898A JP3934159B2 JP 3934159 B2 JP3934159 B2 JP 3934159B2 JP 51445898 A JP51445898 A JP 51445898A JP 51445898 A JP51445898 A JP 51445898A JP 3934159 B2 JP3934159 B2 JP 3934159B2
- Authority
- JP
- Japan
- Prior art keywords
- sensor
- tube
- patient
- measurement unit
- signal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images











Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/08—Detecting organic movements or changes, e.g. tumours, cysts, swellings
- A61B8/0833—Detecting organic movements or changes, e.g. tumours, cysts, swellings involving detecting or locating foreign bodies or organic structures
- A61B8/0841—Detecting organic movements or changes, e.g. tumours, cysts, swellings involving detecting or locating foreign bodies or organic structures for locating instruments
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00002—Operational features of endoscopes
- A61B1/00043—Operational features of endoscopes provided with output arrangements
- A61B1/00055—Operational features of endoscopes provided with output arrangements for alerting the user
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00002—Operational features of endoscopes
- A61B1/00057—Operational features of endoscopes provided with means for testing or calibration
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/31—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor for the rectum, e.g. proctoscopes, sigmoidoscopes, colonoscopes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/22—Implements for squeezing-off ulcers or the like on the inside of inner organs of the body; Implements for scraping-out cavities of body organs, e.g. bones; Calculus removers; Calculus smashing apparatus; Apparatus for removing obstructions in blood vessels, not otherwise provided for
- A61B17/22004—Implements for squeezing-off ulcers or the like on the inside of inner organs of the body; Implements for scraping-out cavities of body organs, e.g. bones; Calculus removers; Calculus smashing apparatus; Apparatus for removing obstructions in blood vessels, not otherwise provided for using mechanical vibrations, e.g. ultrasonic shock waves
- A61B17/22012—Implements for squeezing-off ulcers or the like on the inside of inner organs of the body; Implements for scraping-out cavities of body organs, e.g. bones; Calculus removers; Calculus smashing apparatus; Apparatus for removing obstructions in blood vessels, not otherwise provided for using mechanical vibrations, e.g. ultrasonic shock waves in direct contact with, or very close to, the obstruction or concrement
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/34—Trocars; Puncturing needles
- A61B17/3403—Needle locating or guiding means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/06—Devices, other than using radiation, for detecting or locating foreign bodies ; determining position of probes within or on the body of the patient
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/06—Devices, other than using radiation, for detecting or locating foreign bodies ; determining position of probes within or on the body of the patient
- A61B5/065—Determining position of the probe employing exclusively positioning means located on or in the probe, e.g. using position sensors arranged on the probe
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/08—Detecting organic movements or changes, e.g. tumours, cysts, swellings
- A61B8/0833—Detecting organic movements or changes, e.g. tumours, cysts, swellings involving detecting or locating foreign bodies or organic structures
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/01—Introducing, guiding, advancing, emplacing or holding catheters
- A61M25/0105—Steering means as part of the catheter or advancing means; Markers for positioning
- A61M25/0127—Magnetic means; Magnetic markers
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/10—Balloon catheters
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B10/00—Other methods or instruments for diagnosis, e.g. instruments for taking a cell sample, for biopsy, for vaccination diagnosis; Sex determination; Ovulation-period determination; Throat striking implements
- A61B10/02—Instruments for taking cell samples or for biopsy
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/34—Trocars; Puncturing needles
- A61B17/3415—Trocars; Puncturing needles for introducing tubes or catheters, e.g. gastrostomy tubes, drain catheters
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00017—Electrical control of surgical instruments
- A61B2017/00022—Sensing or detecting at the treatment site
- A61B2017/00106—Sensing or detecting at the treatment site ultrasonic
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00477—Coupling
- A61B2017/00482—Coupling with a code
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00681—Aspects not otherwise provided for
- A61B2017/00725—Calibration or performance testing
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/22—Implements for squeezing-off ulcers or the like on the inside of inner organs of the body; Implements for scraping-out cavities of body organs, e.g. bones; Calculus removers; Calculus smashing apparatus; Apparatus for removing obstructions in blood vessels, not otherwise provided for
- A61B17/22004—Implements for squeezing-off ulcers or the like on the inside of inner organs of the body; Implements for scraping-out cavities of body organs, e.g. bones; Calculus removers; Calculus smashing apparatus; Apparatus for removing obstructions in blood vessels, not otherwise provided for using mechanical vibrations, e.g. ultrasonic shock waves
- A61B2017/22005—Effects, e.g. on tissue
- A61B2017/22007—Cavitation or pseudocavitation, i.e. creation of gas bubbles generating a secondary shock wave when collapsing
- A61B2017/22008—Cavitation or pseudocavitation, i.e. creation of gas bubbles generating a secondary shock wave when collapsing used or promoted
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2051—Electromagnetic tracking systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B2090/363—Use of fiducial points
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
- A61B2090/3925—Markers, e.g. radio-opaque or breast lesions markers ultrasonic
- A61B2090/3929—Active markers
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
- A61B2090/3954—Markers, e.g. radio-opaque or breast lesions markers magnetic, e.g. NMR or MRI
- A61B2090/3958—Markers, e.g. radio-opaque or breast lesions markers magnetic, e.g. NMR or MRI emitting a signal
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2560/00—Constructional details of operational features of apparatus; Accessories for medical measuring apparatus
- A61B2560/02—Operational features
- A61B2560/0266—Operational features for monitoring or limiting apparatus function
- A61B2560/0276—Determining malfunction
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/0021—Catheters; Hollow probes characterised by the form of the tubing
- A61M25/0023—Catheters; Hollow probes characterised by the form of the tubing by the form of the lumen, e.g. cross-section, variable diameter
- A61M2025/0025—Catheters; Hollow probes characterised by the form of the tubing by the form of the lumen, e.g. cross-section, variable diameter having a collapsible lumen
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/01—Introducing, guiding, advancing, emplacing or holding catheters
- A61M25/0105—Steering means as part of the catheter or advancing means; Markers for positioning
- A61M2025/0166—Sensors, electrodes or the like for guiding the catheter to a target zone, e.g. image guided or magnetically guided
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/10—Balloon catheters
- A61M2025/1043—Balloon catheters with special features or adapted for special applications
- A61M2025/1052—Balloon catheters with special features or adapted for special applications for temporarily occluding a vessel for isolating a sector
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/0021—Catheters; Hollow probes characterised by the form of the tubing
- A61M25/0023—Catheters; Hollow probes characterised by the form of the tubing by the form of the lumen, e.g. cross-section, variable diameter
Description
本発明は、一般に体内チューブ、すなわち患者の医療ケアに使用される体内チューブに関し、詳細には人間の体内医療チューブの位置確認に関する。
発明の背景
多くの場合、薬、血液製剤、他の食物栄養剤の短期間あるいは長期間注入(輸液;点滴)のために、医療チューブが患者の体内に挿入される。そのようなチューブは例えば患者の静脈、動脈あるいは消化系に注入される。例えば、癌化学療法と抗生物質療法では、薬を注入するチューブの出口を血液流量の高い領域に配置しなければならない。他の例として自分で食べることができない患者は、自分の鼻や口から胃に挿入された食物供給チューブを有する。食物供給液は患者の体外の食物供給チューブの末端から患者の胃に挿入される。食物供給液は、通常、他の体の部分でなく胃の中に挿入されなければならない。他の体内チューブには、食道の狭窄を広げるための拡張用チューブ、結腸減圧チューブ、泌尿器科用チューブがある。
多くの場合、体内チューブは定期的に長期間使用される。従って、チューブを挿入できる人が誰もいないような患者が在宅ケアにある時、これは特に重要である。患者の在宅ケアは、病院費用のコスト増大およびケア期間の長期化のために、広く行きわたった成長分野である。
所定の場所に固定された体内チューブを維持する簡単な方法がなく、体内チューブがその元の場所に何時も留置していないのが普通である。体内チューブの出口は患者の体内の場所から位置が定まらない状態にある。その出口が適切な場所に無い時にそのチューブを使用すると、重大な損傷を招くことがある。例えば食物供給チューブの先端が丸くなり患者の肺に移動する。そのような場合、食物供給液をそのチューブから挿入すると患者を殺すことになるだろう。同様に、心臓の上位大静脈のような大血液流の適切な場所に化学療法注入チューブを配置しなければならない。そうしなければ薬で管系の内層が損傷する。注入チューブを通して心臓に薬を受ける患者の中には、気が付かない内に起きる注入チューブの移動のためにかなりの患者が合併症を引き起こすことがわかった。
他の場合として注入チューブ以外の患者の体内の物体の場所についても追求することが望ましいことがある。例えば、ねじ、電極、シャント、あるいは患者の体内に移植された他の物体の場所を追求することが望ましい。特殊な例として腸の破れた部分をつなぐのに使用するマーフィー(Murphy)ボタンがある。そのマーフィーボタンは腸内に移植され、腸が回復するまで同じ場所に留置する必要がある。腸が回復したら、マーフィーボタンは腸に沿って患者の体から出す必要がある。医療スタッフは、通常、患者の体内でボタンが詰まる場合にそのボタンの移動を追跡する。
医療チューブの場所を確認する様々な方法が当技術で示されている。X線イメージング法が最も一般的に使用された位置確認システムである。位置決定システムをこの目的のために使用することもできる。
米国特許第5,425,382号は医療チューブの位置確認のために装置と方法を記載している。この公報の開示を参考として本明細書に含める。医療チューブは静的磁場(磁場)強度勾配を検知する検出装置を使用して位置確認がなされる。ユーザーは患者の体に沿った位置でその勾配の大きさによりチューブを確認する。
他の方法は、放射共鳴要素が医療チューブに関連する米国特許第5,099,845号と第5,325,873号に開示されている。なおこれらの開示を参考として本明細書に含める。装置からチューブまでの距離を示すように異なった地点(場所)の放射線レベルにより装置が設けられ、それによりチューブの位置が決定される。
他のタイプの位置検知装置は米国特許第4,905,698号と第5,4253,367号に記載されている。なおこれらの開示も参考として本明細書に含める。そのような装置は電磁場を誘導するAC電流を発生させ、またそのAC電流はカテーテルの先端のコイルに電流を誘導する。この電流によりカテーテルの相対的位置が決定される。
上記装置を使用すると時間がかかり、そのため体内チューブの使用が面倒になる。またそのような装置を操作するのにあるレベルの技術と経験が必要である。従って、そのような装置は臨床(クリニック)スタッフによる操作が必要であり、広範な在宅ケアには適さない。
発明の要旨
本発明の幾つかの面の一つの目的は、素人が動かすことができる、体内チューブ位置の確認のための簡単な確認装置(検証装置)と方法を提供することである。
本発明の幾つかの面の一つの目的は、体内チューブ位置の迅速な確認のための簡単な確認装置と方法を提供することである。
本発明の幾つかの面の一つの目的は、体内チューブ位置の自動確認のための確認装置を提供することである。
本発明の幾つかの面のもう一つの目的は、体内チューブが適切に配置されていることが確認されなかったならば、そのチューブの使用を止める体内チューブ位置の確認のための確認装置を提供することである。
本発明の幾つかの面の別の目的は、人間の体内の物体の動きを簡単に追跡することである。
1996年9月17日に出願されたイスラエル特許出願第119262号と、1997年2月14日に出願されたPCT特許出願PCT/IL97/00058号は化学治療チューブが元の位置に残っているかどうかを決定する(判断する)方法を開示している。なお、これらの文献は本発明の譲受人に譲渡され、その開示を本明細書に参考として含める。
本発明の幾つかの好ましい実施形態では、患者の体外の確認装置を使用して体内の医療チューブ出口の位置を確認する。その確認装置は2つのモード、すなわちチューブの出口の正確な位置を記録する学習モードと、出口が正確な元の位置のままにあることを後に確認する試験モードで作動するのが好ましい。学習モードでは確認装置は、パラメーターを構成し、確認装置に対するチューブの出口の位置を特徴付ける1個以上のパラメーター値を測定し記録することが好ましい。試験モードでは確認装置は、パラメーターベクトルの値が記録された値に対してそれ程変わっていなかったこと、すなわち、試験された値が記録された値の許容範囲内にあることを確認する。
チューブの出口のちょっとした動きあるいは僅かな動きの不正確さのために生じる間違ったアラームを最小にするため、許容範囲が必要である。出口が危険な位置にあっても出口の適切な位置が確認されないように許容範囲が構成されることが好ましい。許容範囲は、チューブを安全に使用できる患者の体内の領域、および/又は患者に損傷を起こす危険が大体無い領域に普通対応する。
本発明の幾つかの好ましい実施形態では、センサーを医療チューブに、好ましくはチューブの出口近くに固定する。そのセンサーにより確認装置が1個以上のパラメーター値を決定することができる。
本発明の好ましい実施形態では、確認装置を使用する方法には2つの工程(ステップ)、すなわち、位置情報を記録する「学習」工程と、チューブのあらゆる使用の前の位置確認の「試験」工程がある。これらの工程を以下詳細に説明する。
「学習」工程は専門的な臨床スタッフによって好適に実施される。チューブを患者の体内に挿入した後、そのスタッフはチューブの出口が適切に配置されているかを好適に確認する。その確認は、好ましくは確認装置を使用せずにX線イメージング(画像)法のような当技術で知られた確認方法を使用して行なわれる。また確認装置は専門家がセンサーの位置を確認できる第2モードを有する。
出口の位置が確認されたら、確認装置を体に隣接する固定部位(箇所)に配置する。その固定部位と出口位置が登録されることになり、後に確認される。確認装置を一旦固定部位に配置したら、後に行なわれる確認のために位置情報の登録が学習モードで行なわれる。学習モードはパラメーターベクトルの値の測定を好適に開始する。そこで試験モードにおいて確認装置でさらに使用有効であるように1個以上のパラメーターの値が蓄えられる。
固定部位は患者の体に接してあり、そして臨床スタッフか自動的に確認装置によりさらに使用するためにマークされることが好ましい。固定部位からチューブの出口までの相対的な距離が短く一定であり、患者が体の向きを変える場合あるいは呼吸のために実質的に変わらないように固定部位が好適に選択される。
また患者の呼吸による相対的な距離の変化は、呼吸サイクルの一部でのみ作動するように確認装置をゲート制御することによって防止される。さらに、あるいは代わりに患者の呼吸と体の向き(配向)による相対的な変化は、1個以上のパラメーターの許容範囲を大きな範囲を構成することによって構成する場合に考慮される。
本発明の他の実施形態では、確認装置はある期間にパラメーターベクトルの測定を多数行ない、パラメーターベクトルの測定値の全体の範囲を決定し蓄える。従って、患者の呼吸による1個以上のパラメーターの変化が位置確認の精度を落とさずに考慮することができる。
試験工程は好適に簡単であり、それにより先行知識あるいは経験がユーザーに無くてもよい。チューブを必要とする時にいつも確認装置を固定部位に当て試験モードで作動する。試験モードでの確認装置は測定し、パラメーターベクトルの値を蓄えられた(記憶された)値と比較し、その比較に基づいてチューブの出口が正確に配置されているかいないかを伝える。
本発明の幾つかの好ましい実施形態では、患者の体内の2個以上の物体の位置を確認することが必要である。同様に長いチューブの適切な配置と配向(向き)を確認するため、チューブに沿った2箇所以上の位置を確認することができる。そのような場合、2箇所以上の固定部位が使用され、確認装置が応答を行う前に学習モードと試験モードの双方で全ての固定部位で逐次ユーザーが確認装置を動かす。この実施形態ではパラメーターベクトルは各固定部位で測定された種々の部材を有している。
本発明の幾つかの好ましい実施形態では、確認装置を使用してチューブを通る流体の流れをゲート制御する。確認装置が液体挿入前に試験モードで作動しなければ確認装置がチューブの流体の流れを止める。チューブが正規の位置にあることを示す信号が確認装置から別個のゲートボックスに送られることが好ましい。またチューブは流れをゲート制御する確認装置を通る。従って、確認装置は自動注入で使用することができる。
本発明の好ましい実施形態では、パラメーターベクトルの測定は、チューブに固定されるセンサーにあるいはセンサーから送られる1つ以上の信号に基づいている。そのような信号は超音波、紫外線波、高周(RF)波、静あるいは回転電磁場、レーザービームなどであろう。使用されるパラメーターは確認装置とセンサーの間の距離と機能的な関係を有することが好ましい。代わりにあるいはさらに、使用されるパラメーターは確認装置からセンサーまでの方向と機能的な関係を有する。
本発明の幾つかの好ましい実施形態では、RF波の振幅が測定される。確認装置は、受動RFトランスポンダーからなるセンサーにRF波を伝える測定ユニットを備えている。センサーは測定ユニットにRF波を反射し、測定ユニットは放射された波の振幅を検知する。代わりにあるいはさらに、信号の位相、分散、ノイズレベル、伝播時間あるいはセンサーの位置と機能的関係を有する信号の他の全てのパラメーターを測定することができる。
そのような1つの好ましい実施形態では、磁場結合に基づいて確認装置が測定する。トランスポンダーは直列あるいは並列に接続された3本の小型コイルから好適に構成される。このコイルは直線で相互に独立した軸を有するのが好ましく、互いに直交配置とすることが最も好ましい。確認装置は、センサーの小型コイル内に電流を誘導する磁場を発生する電磁線(ラジエーション)コイルを好適に備えている。小型コイルに誘導された電流の確認装置に対するリターン効果を測定し、そして結果として小型コイルから確認装置までの距離を測定する。
本発明を外科用チューブに関連して説明したが、本発明は、ねじ、ステープル、電極、シャント、ボタンなどのような体内にある物体の位置を確認するために使用することができることに注目されたい。
従って、本発明の好ましい実施形態によれば人間の体内に挿入された物体の位置を確認する方法であって、
最初に物体から信号を受けることによって前記物体の位置に依存するパラメーターベクトルの最初の値を測定する工程と、
後で前記物体から信号を受けることによって前記ベクトルの第2の値を測定し、前記最初の値の所定範囲内に前記第2の値があるかどうか決定する工程を含む方法が提供されている。
第2の値に応答して物体の使用を制御する工程を含むことが好ましい。
さらに、物体の使用を制御する工程が、第2の値を測定し、所定範囲内に第2の値があることを決定した後、所定の期間のみその物体を使用させる工程を含むことが好ましい。物体の使用を制御する工程が医療チューブによる流体の流れを制御する工程を含むことが好ましい。
第2の値が所定範囲内にあるかどうかを、後に、ユーザーに知らせる工程を含むことが好ましい。
ユーザーに知らせる工程は、第2の値がその範囲外にあればユーザーに警告を与える工程を含むことが好ましい。
この方法は第1の値を測定する前に物体の位置を確認する工程を含むことが好ましい。
体が呼吸サイクルを有し、最初と後の測定が呼吸サイクルで略同じ部位でその双方の時に測定する工程を含むことが好ましい。
ベクトルの値を測定するが体内の医療チューブの位置に依存するパラメーターベクトルを測定する工程を含むことが好ましい。
この方法は第2の値に応答して医療チューブを介する流れを制御する工程を含むことが好ましい。
最初と後の測定が、体に隣接する共通チェック位置で信号を受ける工程を含むことが好ましい。
最初の測定が体に接するチェック位置をマークする工程を含むことが好ましい。
共通位置で信号を受ける工程が、所定の順序で複数のチェック位置で信号を受けることが好ましい。
最初に測定する工程が、所定の順序により複数のチェック位置をマークする工程を含むことが好ましい。
パラメーターベクトルが、そのそれぞれのチェック位置から物体までの距離と機能的な関係を有する少なくとも一つの部材を備えることが好ましい。
第2の値が1箇所以上で信号を受けて前記第2の値が所定範囲内にある位置を見つける工程を含むことが好ましい。
信号を受けることによってベクトルを測定する工程が、測定期間に信号の値の範囲を測定する工程を含むことが好ましい。
その代わり、あるいはさらに、信号を受けることによってベクトルを測定する工程が、信号の値の範囲の上下限界を決定する工程を含むことが好ましい。
その代わり、あるいはさらに、信号を受けることによってベクトルを測定する工程が、信号の伝播時間を検知する工程を含む。
その代わり、あるいはさらに、信号を受けることによってベクトルを測定する工程が、信号の振幅を検知する工程を含む。
その代わり、あるいはさらに、信号を受けることによってベクトルを測定する工程が、信号の位相を検知する工程を含む。
その代わり、あるいはさらに、信号を受けることによってベクトルを測定する工程が、信号の分散を検知する工程を含む。
その代わり、あるいはさらに、信号を受けることによってベクトルを測定する工程が、信号のノイズレベルを検知する工程を含む。
信号を受ける工程が高周波を受ける工程を含むことが好ましい。
その代わり、あるいはさらに、信号を受ける工程が音波を受ける工程を含む。
その代わり、あるいはさらに、信号を受ける工程が磁場を検知する工程を含む。
磁場を検知する工程が磁場の勾配を検知する工程を含むことが好ましい。
その代わり、あるいはさらに、信号を受ける工程が交流磁場を検知する工程を含む。
磁場を検知する工程が前記物体に連結された磁石の磁場を検知する工程を含むことが好ましい。
磁石の磁場を検知する工程が回転磁石から生じる磁場を検知する工程を含むことが好ましい。
その代わり、あるいはさらに、最初の値と第2の値を測定する工程が、コイル内で誘導された電流を検知する工程を含む。
電流を検知する工程が、物体に取り付けられたコイルから生じる界のために誘導された電流を検知する工程を含むことが好ましい。
電流を検知する工程が、物体に取り付けられたコイル内に誘導された電流を検知する工程を含むことが好ましい。
その代わり、あるいはさらに、最初の値と第2の値を測定する工程がコイルの電流に応答してコンデンサーを充電し、放電する工程を含む。
本発明の好ましい実施形態によれば患者の体内の物体の位置を確認するための確認装置であって、前記装置は学習モードと試験モードを有し、
その位置に応答して前記物体から信号を受ける受信機と、
前記信号からパラメーターベクトルを得る信号分析回路部品と、
前記学習モードで前記信号分析回路部品から受けた前記パラメーターベクトルの学習値を記録するメモリーと、
前記試験モードで前記信号分析回路部品から受けた前記パラメーターベクトルの試験値を受け、前記試験値が前記学習値の所定範囲内にあるかどうか決定し、それによって前記物体の位置を確認するプロセッサーを含む確認装置が提供される。
試験値が所定範囲内にあるか無いかに依存する確認信号を供給する出力をこの装置が含むことが好ましい。
試験モードでプロセッサーから確認信号を受け、その信号に応答して物体の使用を可能にするゲートをこの装置が含むことが好ましい。
試験モードで試験値が所定範囲内にあるかどうかを装置のユーザーに知らせるユーザーインターフェースをこの装置が含むことが好ましい。
1個以上の学習値を記録する前に物体が適切に配置されていることを確認するためにプロセッサーがユーザーにパラメーターベクトルの値を提供することが好ましい。
パラメーターベクトルが、この装置から物体までの距離に依存するパラメーターを含むことが好ましい。
パラメーターベクトルが、この装置に対する物体の位置に依存するパラメーターを含むことが好ましい。
所定範囲が物体の有用性を示す範囲を含むことが好ましい。
物体に取り付けられ、受信機が信号を受けるセンサー内に電流を誘導するために少なくとも1つの電磁場送信機を含むことが好ましい。
受信機が少なくとも1本のコイルを含み、信号分析回路部品がコイル内に誘導された電流を前記センサーにより測定することが好ましい。
少なくとも1本の受信機コイルが電磁場送信機としても作用することが好ましい。
少なくとも1本の受信機コイルが複数のコイルを含むことが好ましい。
複数のコイルが、相互に離れた複数の受信機要素を含み、その要素の各々が複数の相互に直交するコイルからなることが好ましい。
1個の信号分析回路部品がパラメーターベクトルの上下限を決定することが好ましい。
1個の信号分析回路部品が信号の伝播時間を測定することが好ましい。
その代わり、あるいはさらに、1個の信号分析回路部品が信号の振幅、位相、分散(ばらつき)あるいはノイズレベルを検知する。
受信機は高周波受信機からなることが好ましい。
その代わり、あるいはさらに、受信機は音波受信機からなる。
その代わり、あるいはさらに、受信機は磁場センサーからなる。
磁場センサーは磁場勾配センサーからなることが好ましい。
第1磁石が前記物体に結合され、この装置は、磁場が磁場センサーにより測定される第1磁石の回転を起こす第2磁石を含むことが好ましい。
この装置がユーザー作動コントロールを含み、それによりユーザーがこの装置の作動を開始することが好ましい。
この装置がポーリング信号に応答して作動することが好ましい。
この装置が患者の呼吸サイクルを決める呼吸ベルトを含み、学習モードと試験モードが呼吸サイクルの略同じステージで作動することが好ましい。
物体が、患者の体内に挿入される医療チューブであり、そのチューブに取り付けられた位置センサーが受信機で受信される信号を発生することが好ましい。
その代わり、あるいはさらに、試験値が学習値の所定範囲内にあることをプロセッサーが決定すると、チューブに流すゲート制御弁をこの装置が含む。
その代わり、あるいはさらに、この装置が、ポンプの作動時に定期的に物体の位置確認を始める注入ポンプを含む。
注入ポンプが、流体をチューブに挿入する時はいつも確認装置の作動を開始することが好ましい。
この装置は、試験値が学習値の所定範囲内にあることを確認し、そしてその試験値が所定範囲内にある限り、作動を制御する注入ポンプを含むことが好ましい。
本発明の好ましい実施形態によれば患者の体内に流体を制御可能に挿入するための装置であって、
患者の体内に挿入するための医療チューブと、前記体内のチューブの位置を示す信号を発生する、前記医療チューブに取り付けられた位置センサーとを含む制御された注入装置と、
前記信号に基づいて、前記センサーの位置の確認に応答してチューブに流すゲート制御弁を含む装置がさらに提供される。
位置センサーは受動トランスポンダーであることが好ましい。
位置センサーが、患者の体の外部で無線接続されていることが好ましい。
位置センサーが少なくとも1本のコイル、最も好ましくは1本のコイルを含むことが好ましい。
その代わり、あるいはさらに、位置センサーが、コイルを介して充電されるように結合されたコンデンサーを含む。
位置センサーが、コンデンサーを放電するクランプ回路を含むことが好ましい。
また位置センサーが、直線に相互に独立した軸を有する少なくとも3本のコイルを含む。
少なくとも3本のコイルが直列に接続されることが好ましい。
また少なくとも3本のコイルが並列に接続される。
位置センサーが磁石を含むことが好ましい。
位置センサーが回転磁石を含むことが好ましい。
その代わり、あるいはさらに、位置センサーが音トランスポンダーを含む。
チューブが患者の体内に出口を有し、そして位置センサーがチューブの出口に隣接していることが好ましい。
チューブが静脈内のチューブであることが好ましい。
その代わり、あるいはさらに、チューブが胃のチューブである。
本発明は、図面を考慮したその好ましい実施形態の以下の詳細な説明からより十分に理解される。
【図面の簡単な説明】
図1は本発明の好ましい実施形態による食物供給チューブと確認装置を付けた患者の斜視図である。
図2Aは本発明の好ましい実施形態による確認装置の斜視図である。
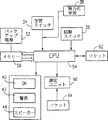
図2Bは本発明の好ましい実施形態による図2Aの確認装置の構成部品(要素)の概略ブロック図である。
図3は本発明の好ましい実施形態による、学習ステージでの図2Aの装置のアクションを示すフローチャートである。
図4は本発明の好ましい実施形態によるセンサーと測定ユニットの概略側面図である。
図5Aは本発明の好ましい実施形態による、学習ステージでの医師のアクションを示すフローチャートである。
図5Bは本発明の好ましい実施形態による、試験ステージでのユーザーのアクションを示すフローチャートである。
図6は本発明の好ましい実施形態による、試験ステージでの図2Aの装置のアクションを示すフローチャートである。
図7は本発明の他の好ましい実施形態による食物供給チューブを付けた患者の斜視図である。
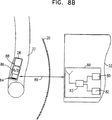
図8Aは本発明の他の好ましい実施形態によるセンサーと測定ユニットの概略側面図である。
図8Bは本発明の他の好ましい実施形態によるセンサーと測定ユニットの概略側面図である。
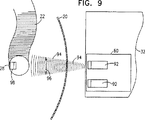
図9は本発明のさらに他の好ましい実施形態によるセンサーと測定ユニットの概略側面図である。
図10は本発明のさらに他の好ましい実施形態によるセンサーと測定ユニットの概略側面図である。
図11は本発明の別の好ましい実施形態によるセンサーと測定ユニットの概略側面図である。
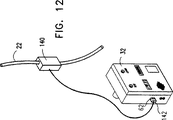
図12は本発明の好ましい実施形態による流体ゲート制御システムの斜視図である。
図13は本発明の他の好ましい実施形態による、流体流を制御する場合に図2Aの装置の使用を示す斜視図である。
図14は本発明の他の好ましい実施形態による、患者の体内の物体の位置を追跡するために図2Aの確認装置の使用を示す。
好ましい実施形態の詳細な説明
図1は鼻から胃24内に及ぶ食物供給チューブ22を付けた患者20を示す。この図は本発明の好ましい実施形態を示している。チューブ22は胃内にある出口26を有する。センサー28は出口26近くのチューブ22に固定されている。固定部位30は選択されるが、患者の皮膚に選択されるのが好ましい。確認装置(検証装置)32は部位30に皮膚にに対して配置される。部位30は、胃24からの距離が患者の残りの位置に関係なく略一定であるように選択される。センサー28は以下に説明するように確認装置32に関連して作動して出口26の位置を確認する。
図2Aと2Bは本発明の好ましい実施形態による確認装置32を示す。確認装置32はポケットサイズの箱(ボックス)に好適に入っている。確認装置32は電源50を好適に備えてその作動用電力を供給する。電源50はどのような電源でも使用できるが低電圧耐久電池(バッテリー)が好ましい。確認装置32は、固定部位30(図1)に確認装置32を正確に容易に配置するガイド46を有するのが好ましい。ガイド46は装置32の箱から延在する部分からなるが、この装置32が固定部位30に対して好ましくは特定の向きでユーザーによって配置されることを意味している。確認装置32は制御盤48を備えるが、この制御盤48はこの装置のガイド46の反対側にあるのが好ましい。制御盤48は、以下説明するように学習ステージを開始する学習スイッチ34と、試験ステージを開始する試験スイッチ36を好適に有する。さらに、制御盤48は、スピーカー44および/又は「OK」ディスプレー40と、チューブが適切に配置されているかをユーザーに知らせる警告ディスプレー42および/又は他の制御情報を有する。また確認装置32はユーザーに情報を伝達するためのLEDあるいは他の適切な指示装置(インディケータ)を備えている。
確認装置32の学習ステージは、患者の体20内のチューブの位置に関係する情報を記録するために使用される。試験ステージはチューブ22が患者の体20内部でほとんど動かなかったことを確認するために使用される。学習ステージと試験ステージは共に、装置32内に配置されたCPU54により実施される。図2Bに示された確認装置32の他の要素をこの装置の動作(操作)方法に関連して以下に説明する。
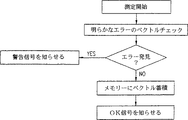
図3は本発明の好ましい実施形態により学習ステージを実施するCPU54の学習プログラムの動作のフローチャートである。学習プログラムは測定ユニット60の動作を開始するのが好ましい。このユニット60は、以下説明するように、チューブ出口26のセンサー28の位置に関係する制御ベクトルを構成する1個以上の制御パラメーターを測定する。
CPU54は測定ユニット60から測定結果を受け、エラーがあるかどうかその結果を好適にチェックする。そのようなエラーは許容できる所定範囲を越えた値、測定ユニットの不調などを伴うだろう。エラーが検出されなければ制御ベクトルがメモリー58に蓄積される。メモリー58は当技術で知られているように小容量不揮発性読出し/書込みメモリーチップが好適である。また、電源50が不調の場合にメモリーに蓄積されるパラメーター値の消失を防ぐために、バックアップ電源52でメモリー58に電力を供給する。
1個以上のパラメーターが適切に測定され蓄積されれば、「OK」信号を、好ましくは制御盤48のOKディスプレー40を明るくすることによってユーザーに伝える。しかしながら、測定がうまくゆかなかったならば、例えば、不合理な値を受けたり、確認装置32で不調がわかったら、警告信号を、例えば、制御盤の警告ディスプレー42を明るくすることによってユーザーに伝え、値を蓄積しない。その他、あるいはさらにスピーカー44を使用して、例えばアラーム又はオーディオメッセージを出すことによりユーザーに知らせる。
図4は本発明の好ましい実施形態によるセンサー28と測定ユニット60の詳細を示す。センサー28は、平行にあるいは直列につながれ3直交方向に整合された3本のコイル78を備えて、センサー28の向きに関係なくそのセンサーの方に出される磁場に確実に応答するようにすることが好ましい。コイル78は、例えばPCT特許出願PCT/GB93/01736号、PCT公報WO94/04938号、PCT公報WO96/05768号あるいは1997年1月8日に出願され本出願の譲受人に譲渡されるPCT特許出願第PCT/IL97/00009号に記載されたように小型(ミニチャー)コイルが好ましい。これらのPCT文献の全ての開示を本明細書に参考として含める。本発明の代表的な実施形態は、センサー28が1.2mmの断面と約8mmの長さの円筒形状である。別に、あるいはさらにセンサー28は、当技術で知られているようにホトリソグラフイー技術を使用して基板にプリントされた1本以上のコイルからなり、好ましくは略直交配向の2本以上のそのようなコイルを有するアセンブリの一部としてのコイルからなる。本発明の実施形態では、磁場位置決定システムおよびセンサー28の案内でチューブ22が患者の体内に挿入される。磁場位置決定システムは、例えば米国特許第5,558,091号、第5,391,199号、あるいは第5,443,489号に、あるいは国際特許公報WO94/04938号あるいはWO96/05768号に記載されているものと同様である。なおこれらの文献を本明細書に参考として含める。そのような位置決定システムを使用することによってその位置決定システムで登録された配位に従ってチューブが正確に挿入される。チューブ22を挿入したら、チューブ22の位置を登録し確認するため確認装置32によりセンサー28を使用する。従って、センサー28はチューブ22の挿入と後に行なわれる位置確認の双方のために使用される。
位置確認は位置決定システムによって同様に実施できることが注目される。しかしながら、単純性、携帯性、確認装置32の低コストのために、在宅ケアには位置決定システムよりむしろ確認装置32が与えられることが好ましい。
測定ユニット60は少なくとも1本の放射体コイル、好ましくは3本のそのようなコイルからなる。測定ユニット60を作動すると、電流、好ましくは異なった周波数のAC電流が流れ、それらの近くでそれぞれの磁場が誘導される。別にあるいはさらに、電流が1本のコイルから次のコイルまで適切に遅れてコイル70を連続して流れる。コイル70との磁気連結のためにそれぞれの電流がセンサー28のコイル78に誘導される。誘導電流の振幅(大きさ)は、測定ユニットとセンサーとの間の距離の三乗に反比例するのが普通である。コイル78の誘導電流は、同様にユニット60とセンサー28の間の距離の関数であるコイル70の向流を誘導する。コイル70の向流の振幅(大きさ)を測定し、その値はベクトルを好適に構成する。そのベクトルは測定ユニット60とセンサー28との間の距離72の関数である。磁気連結により少なくとも15cmにわたりしかもチューブの位置で0.5cm未満の解像度でセンサー28の位置確認ができる。
センサー28は電子回路69、例えばセンサーコイル78に連結されたオシレーター回路をさらに有するのが好ましい。回路69はコイル78からの誘導電流し、これらの電流に応答してコイル78に信号を発生する。この信号を測定ユニット60で受信する。回路69は活性回路要素を備え、この活性回路要素は、当技術で知られている非接触高性能カードで使用される動作電力と同様にコイル78を介してユニット60から動作電力を受ける。回路69はセンサー28での電流誘導と測定ユニット60での向流の誘導間に遅延をもたらすことが好ましい。この遅延により、誘導電流の干渉を受けずにユニット60がコイル70の向流を測定する。また測定ユニット60は、コイルに流れセンサー28により誘導された信号によって発生した電流の振幅の差を測定する。
回路69はさらに、40kHzのような特定周波数に応答する共鳴回路を備えるてもよい。ユニット60はその特定周波数を伝え、回路69で発生した共鳴信号を測定する。
図5Aは、本発明の好ましい実施形態による装置32の動作の学習ステージにおける医師あるいは他の臨床スタッフのアクションを示す。チューブ22を挿入後、X線イメージングあるいは磁場位置決定のような当技術で知られた方法を使用してチューブが胃の中にあることを医師が好適に確認する。本発明の他の実施形態では、確認装置32はさらに技師が出口26の位置確認ができる位置発見モードの動作を有する。このモードでは確認装置32はユニット60から直接専門家のユーザーにパラメーター値を報告し、確認信号を提供などしない。異なった場所で行なったパラメーターの数回の測定により、専門家のユーザーはチューブの出口を検出し、その出口がその正確な位置にあることを確認することができる。位置発見モードは例えば米国特許第5,099,845号、米国特許第5,425,382号にあるいは米国特許第4,905,698号に記載されているように作動するだろう。なおこれらの公報を本明細書に参考として含める。
位置発見モードの画像あるいは測定に基づいてチューブ22がその正確な位置にないことを医師が決定(判断)すれば、その医師は例えばチューブを外し、患者にそのチューブを再挿入することによってチューブをその正確な位置に導く。
出口26の正確な位置を確認した後、学習ステージを好ましくは医師が行なう。この学習ステージでは好ましくはガイド46(図2A参照)が固定部位30(図1参照)にあるように一定の向きで確認装置32を固定部位30に配置する。次に学習スイッチ34を作動させ、信号を確認装置32から受ける。例えば患者にX線撮影をしながらチューブの位置が正確な位置になるように目で確認しながら学習スイッチ34を作動するのが好ましい。
警告信号を確認装置32から受ければ、例えば新しい固定部位を選択するかチューブ22を再配置することによって医師は問題を見つけ、その問題を直すのが好ましい。OK信号を受けるまで学習スイッチ34を再び作動させる。OK信号を受ければ確認装置32をアンカー部位30に戻すだけのために固定部位30を患者の体に永久にマークすることが好ましい。確認装置32には2つの状態を有する学習無力化スイッチ38があるのが好ましい。第1状態では、CPU54の学習プログラムを患者がうっかり動かさないように、スイッチ38はスイッチ34を無力化する。学習ステージの間に使用される第2状態では、スイッチ34を普通に作動させる。また確認装置は2つの部品を備えている。すなわち1つの部品は在宅ユーザーに与えられる試験部品であり、他の1つはその試験部品につながれた臨床スタッフが使用するためだけの学習部品である。
試験ステージが完了した後、無力化スイッチ38を動かして無力化状態にすることが好ましい。確認装置32を患者あるいは在宅ケアヘルパーに与えていつも寝る前に日常の位置確認を行なう。
図5Bは患者が寝る前にチューブの出口26の位置を確認するために在宅ユーザーあるいは患者がとるアクションを示す。食物供給液をチューブ22に通すたびに、確認装置32を、学習ステージで使用した一定の配向で固定部位に配置する。次に試験スイッチ36を作動し、チューブ22が適切に配置されているかを確認する。確認装置32が「OK」信号を示している場合にのみ以下のように食物供給液を患者に供給する。
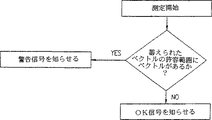
図6は、本発明の好ましい実施形態による試験ステージを実施するCPU54の試験プログラムの動作を示すフローチャートである。CPU54は、試験測定値のベクトルを得る測定ユニット60の動作を開始する。ユニット60からの試験時間ベクトルをメモリーに蓄積されたベクトルと比較して試験ベクトルがメモリー58に蓄積された値の許容範囲内かどうかを判断する。試験ベクトルが蓄積されたベクトルの所定範囲内にあれば、OK信号を発生し、ユーザーに知らせる。しかしながら、1個以上の試験値が蓄積されたベクトルの所定範囲外であれば、警告信号を発生し、ユーザーに知らせる。出口26がその元の位置の所定の距離範囲内にあれば、確認装置がOK信号を発生するように所定範囲の値を構成する。他の範囲を確認装置の特定の用途により構成することができるが、所定の範囲は0.5cmないし5cmが好ましく、0.5cmないし2cmが最も好ましい。別にあるいはさらに、その範囲は医師あるいはユーザーが特定の用途により調節してもよい。
従って、図5Bに示したようにOK信号を受ければ、チューブ22を通して栄養物流体を患者に投与する。しかしながら、警告信号を受ければ、ユーザーは専門的なアシスタントを呼ぶ。また図7に示したように、ベクトルを構成する1個以上のパラメーターを測定し1部位より多くの部位と比較することができる。これによって測定がより高精度になり、また1個より多くの物体の位置確認ができる。同様に1部位より多くの部位で測定することによって患者の動きをさらに相殺することができる。
チューブ出口26の位置を確認した後、上記のように幾つかの部位30、好ましくは3つの部位(3箇所)を患者の体20にマークするのが好ましい。それらの順序が明確に同定されるように部位30をマークするのが好ましい。例えば数字68を各部位30の隣にマークして順序を示す。学習ステージでは確認装置32を番号順に部位30に動かす。部位30の各々では学習スイッチ34を作動して確認装置32がその部位に関連する1個以上のパラメーターを登録する。3箇所全てからのパラメーターは共にメモリー58に蓄積されるベクトルを構成する。
チューブ22を使用する時はいつも試験ステージを実施する。ユーザーは学習ステージにおける順序と同じ順序で確認装置32を部位30に動かす。3箇所の各々でベクトルのパラメーターを登録するために、ユーザーは試験スイッチ36を作動する。試験スイッチ36を3箇所全てで作動した後、チューブがその正確な位置にあるかどうかを知らせる信号を発生することが好ましい。試験スイッチ36が全ての3箇所で作動していなければ、確認装置32はユーザーに知らせることが好ましい。別にあるいはさらに、確認装置32が試験スイッチ36の動作を認知し、そのスイッチが何回この試験ステージで作動したかを好適に知らせる。
図8Aは本発明の他の好ましい実施形態による測定ユニット60とセンサー28の詳細を示している。測定ユニット60はセンサー28内に電流を誘導するための活性化コイル74と複数の独立した受信要素76を備える。測定ユニット60は装置32の異なった位置に3個の要素76を備えているのが好ましい。各々の要素は、センサー28で発生する磁場を検知するために配置された3本の直交コイル78を好適に具備する。3本の直交コイルを有する要素76を使用することにより、要素76とセンサー28の間の相対的な配向に関係なくセンサー28で発生した磁場が各要素76の少なくとも1個で確実に受信される。従って、センサー28は、最小スペースをとり複雑性が低い1本だけのコイルを備えることができる。複数の要素76を使用するとユニット60の精度が改良され、幾つかの好ましい実施形態では、測定ユニット60は位置発見モードでチューブ22の位置を判断する。
センサー28は、ダイオードと直列につながれた1本のコイル78とコンデンサー73を含む。当技術で知られているように、現在のクランプ回路77をコンデンサーに平行につなぐ。センサー28はフレキシブルなプリント回路を備え、および/又はVLSI方法で製造されることが好ましい。従って、センサー28は非常に小さく、チューブや患者に挿入される他の医療器具に容易に取り付けられあるいは挿入される。
測定ユニット60を作動すると、センサー28の近くで磁場を発生するように電流パルスが活性化コイル74を通る。この磁場に応じてコイル78内に発生した電流はダイオード79を介してコンデンサー73を充電する。電流パルスの終了後、コンデンサー73はクランプ回路77とコイル78を通して放電し、そこで要素76で検出される磁場を発生する。
コンデンサー73は、相当の電荷を蓄えるために十分大きな容量、例えば0.1μFを有し、測定ユニット60がセンサー28に十分近い場合、所定の基準電圧、例えば1.3Vに少なくとも等しい電圧にコンデンサー73が充電されることが好ましい。コンデンサー73の放電時にはクランプ回路77が一定電流ソースで作動し、それによって活性化コイル74を不活性にした後、コイル78を介する電流が一定期間一定になる。この期間では測定ユニット60は要素76を介する電流を測定し、従って、チューブ22に関するセンサー28の位置に関連する少なくとも1つのパラメーターを決定する。例えばPCT特許公報WO94/04938号に記載されているように、当技術で知られたアルゴリズムを使用しながらこの少なくとも1つのパラメーターを使用してセンサーの位置を決めることが好ましい。
図8Bは本発明の他の代わりの好ましい実施形態を示す。この実施形態ではパラメーターの測定はセンサー28で受信した高周波(RF)信号の振幅に基づいている。この実施形態では測定ユニット60はRF送信機(トランスミッター)80とRF受信機(レシーバー)82およびそれらに接続された変調器(モジュレーター)/復調器(デモジュレーター)83を好適に備えている。また代わりに1個の変換器(トランスデューサー)を送信機と発信機の双方として使用してもよい。センサー28は、RF送信機/受信機84およびA/D回路86を好適に備えている。なおA/D回路86はRFエネルギーをディジタル形態に変換する。センサー28内の計算回路部品88は信号の振幅を測定し、その振幅に基づいてセンサー28と装置32の間の距離89を計算する。次に距離89及び/又はRF信号の他の特性を送信機/受信機84によって好ましくはディジタル信号の形態で確認装置32に伝える。なお確認装置32は距離あるいは特性をパラメーターベクトルで記録する。
図9は本発明の他の好ましい実施形態による測定ユニット60とセンサー28の詳細を示す。この実施形態では測定ユニット60は超音波の1個以上の変換器92を備えている。変換器92の1個は、ユニット60の作動を開始すると音波94を伝える。センサー28は、当技術で知られているように音波94をユニット60の方に反射する小型受動トランスポンダー98を好適に備える。変換器92の1個は音波94を受け、出口26の位置を示すパラメーターとしてのその振幅および/又は伝播時間を登録する。代わりにあるいはさらに、ノイズレベルあるいは音波94の分散をパラメーターとして使用する。
音波94がトランスポンダー98に入らなければ、音波94は変換器92の方へ反射せず、この効果に対する信号はユニット60で発生するだろう。しかしながら、音波94が伝播し、領域96をカバーすると音波94が分散することが注目される。従って、センサーあるいは確認装置32が僅かに横への動いても測定ユニット60による測定には大体において影響を与えない。従って、測定ユニット60はセンサーの位置の近似基準を、チューブ22の位置の相当な変化を警告するのに十分な精度で提供する。音波94の広がり(分散)のために、音波の振幅は、伝播時の距離の関数として減少する。従って、受信した音波の振幅は出口26と確認装置32の間の距離に依存し、制御ベクトルのパラメーターとして使用するために適切である。
図10は本発明の他の好ましい実施形態によるセンサー28と測定ユニット60の詳細を示す。この実施形態ではセンサー28は静磁場を発生する磁石110を備えている。測定ユニット60はその近くの磁場の振幅を測定する磁気計(マグネトメータ)112を備えている。磁気計112での磁場の振幅は磁石110と磁気計112の間の距離に依存する。磁気計112が、例えば米国特許第5,425,382号に記載されたように1個以上のフラックスゲートトロイド(ドーナツ形)センサーを具備することが好ましい。
図11は本発明のさらに好ましい実施形態による測定ユニットの詳細を示している。センサー28は、患者の外部好ましくは確認装置32内に配置された外回転磁石124に応じて回転する回転可能な磁石129を備える。測定ユニットを作動すると、外磁石124が回転し、それによりその磁場と磁石124の回転磁場との連結のため磁石120が回転する。磁石120が回ると測定ユニット60で検出されるAC磁場を磁石が作る。測定ユニット60は、磁場の1個以上のパラメーターを決定する少なくとも2個の磁気計検出器を有するのが好ましい。測定ユニット60は、磁気計間の全体の磁場の変化を検出することによって磁石120の磁場と磁石124に磁場を区別することが好ましい。また代わりに磁石120の磁場を、磁石124が回転を停止した後だけ測定する。本発明の実施形態では、磁気計検出器は確認装置32に関して磁石の位置を角度で決定する。磁気計検出器126は米国特許第5,002,137号に記載しているように好ましいが、当技術で知られた他のタイプも同様に使用できる。なおこの公報を本明細書に参考として含める。AC磁場を使用して得られた測定値は、DC磁場を使用して得られた測定値より一般に高精度であることが注目される。
本発明の幾つかの好ましい実施形態ではパラメーターが、異なった方法を使用して測定された複数の異なったパラメーターから構成される。そのようなベクトルは確認装置の精度を向上させる。測定ユニットを作動する時はいつもそのベクトルのパラメーターの全てを測定することが好ましい。
図12は本発明の実施形態による流体制御弁140を示している。確認装置32はソケット62を有し、上記のようにユーザーに確認信号を好適に示す他に確認装置32が発生する確認信号をそのソケット62を介して流す。流体制御弁140はチューブ22に好適に配置され、場合によっては、好ましくはソッケト62内に挿入されたプラグ142につながれた制御ワイヤーにより確認装置につながれる。確認装置32によってOK信号が発生されなければ流体制御弁140によりチューブ22を介する流れが止められる。その場合、流体制御弁140により患者に食物を供給するために十分長い所定期間、チューブ22を介する流れが可能である。従って、チューブ出口26が患者の胃の中に適切に位置していないという疑いがあったり、あるいは食物供給液を挿入する前にチューブ22の位置を確認しなかったならば、食物供給液をチューブ22に通さないだろう。
図13は本発明の他の好ましい実施形態による自動注入(点滴)システム160を付けた患者20を示す。注入チューブ162は注入ポンプ164を介して患者20におよぶ。注入チューブ162の出口166は患者の上位大静脈に好適に配置されている。
患者の他の位置に関係なく、確認装置32が患者の固定部位30に上位大静脈から略一定距離に固定されている。確認装置32は大静脈の上方で患者の胸の中央に固定されるのが好ましい。その他、確認装置32を他の部位に、例えば患者の肩の近くに固定してもよい。
チューブ162が上位大静脈にあることを医師が確認した後、上記のようにその医師は学習スイッチを動かし学習ステージを作動する。OK信号を受けた後、医師は無力化スイッチ38を使用して学習スイッチ34を無力化するのが好ましい。その他、学習スイッチ34をOK信号に応じて無力化する。
注入ポンプ164は当技術で知られているように患者の大静脈に入る薬の量をモニターする。本発明の好ましい実施形態によれば、確認装置が注入ポンプ164と通じており、それにより注入が行なわれている間、注入ポンプ164は、試験プログラムの動作を要請するポーリング信号を確認装置32に送る。確認装置32によりパラメーターベクトルの試験測定を行ない、注入ポンプ164に戻る応答信号を発生する。OK信号を注入ポンプ164で受ければ注入物を患者に流す。しかしながら、警告信号を受ければ注入ポンプ164の作動を中断し、そして例えば注入ポンプか確認装置でブザーを鳴らすことによって看護婦を呼ぶ。
その他、注入ポンプ164に関係なく確認装置32が自動的に、連続的にあるいは間欠的に作動してもよい。確認装置32がOK信号を発生する間は注入ポンプは自主的に作動する。しかしながら、警告信号が発生すればポンプ164の動作を止め看護婦を呼ぶ。
本発明の好ましい実施形態では呼吸用ベルト180で確認装置32の動作をゲート制御する。従って、注入ポンプ164が確認装置32の作動が必要な場合、患者が所定部分の呼吸サイクルになるまで確認装置32の作動を遅らせる。一部分の呼吸サイクルの間、ユニット60を無力化するように、呼吸用ベルト180からの信号を、ソケット64を通して確認装置に好適に送り、それで所定の望ましい部分の呼吸サイクルの間だけ1個以上のパラメーターの測定を認め、それにより測定に関する呼吸の影響を略なくす。
代わりにあるいはさらに、何回もの呼吸の間、好ましくは学習モードと、その後の試験モードの両方で、測定ユニット60に繰り返して1個以上のパラメーターを測定させることによって患者の呼吸を補正する。CPU54はその間、メモリー58に1個以上のパラメーターの最大値と最小値を蓄える。
その後、CPU54の試験プログラムは、試験モードで測定ユニット60で受けた最大値と最小値を、蓄えられた(記憶された)値と比較する。後の最大値と最小値が蓄えられた最大値と最小値の所定範囲内にあれば、OK信号を出す。従って、確認装置の精度を下げずに患者の呼吸の影響が考慮される。
図14は、患者20の体内のマーフィーボタン200のような物体の位置を追跡する本発明の他の好ましい実施形態による確認装置32の使用を示す。マーフィーボタンの位置を追跡するために、患者に確認装置32が与えられる。先ず、マーフィーボタン200の位置上方の患者の皮膚にマークされた部位202に確認装置32を導き、学習モードで作動する。
後に医師からの指示により患者は確認装置32をマーフィーボタンの領域に当て、そして試験スイッチを作動する。警告信号を受ければ確認装置32を僅かに動かし、試験スイッチを再び作動する。OK信号を受けるまでこの手順を続ける。OK信号を受けた場合に確認装置32を配置する部位204を、好ましくはOK信号を受けた日付けと時間に沿ってマークする。この手順は間欠的に繰り返され、それによりマーフィーボタンの前進によりマップが形成される。従って、医師は患者を繰り返し診察したりX線撮影せずにマーフィーボタンの動きを追跡してそのボタンの位置を位置合わせすることができる。
上記好ましい実施形態は実施例によって引用され、本発明の完全な範囲は請求の範囲によってのみ限定されることがわかるだろう。
Claims (20)
- 患者の体内に挿入された物体の位置を決定するシステムであって、
患者の体内に配置されるように構成されたセンサーであって、第1のセンサー信号および第2のセンサー信号を供給するセンサーを含む物体であって、前記患者の体内に挿入されるように構成された物体と、
前記患者の体の外部で使用するための確認装置であって、前記物体の前記センサーによって供給される前記第1のセンサー信号および前記第2のセンサー信号を受信する測定ユニットを備え、さらにメモリー装置を備え、前記確認装置は、前記物体の正確な位置を記録する学習モードと前記物体が前記正確な位置のままにあることを確認する試験モードとでの操作が可能であり、前記学習モードにおいては前記第1のセンサー信号が前記物体の前記センサーによって供給され、かつ前記測定ユニットによって受信され、前記測定ユニットが前記第1のセンサー信号に基づいて制御ベクトルを形成し、該制御ベクトルは前記メモリー装置に記憶され、前記試験モードにおいては前記第2のセンサー信号が前記物体の前記センサーによって供給され、かつ前記測定ユニットによって受信され、前記測定ユニットが試験ベクトルを形成し、該試験ベクトルは前記患者の体内における前記物体の位置を確認するために前記制御ベクトルと比較され、前記確認装置は、前記試験ベクトルと前記制御ベクトルとを比較するためのCPUをさらに含み、前記CPUは所定の値の範囲を持ち、前記CPUは前記制御ベクトルと前記所定の値の範囲とを比較するための手段を有し、前記制御ベクトルが前記所定の値の範囲内にあるときに前記制御ベクトルが前記メモリー装置に記憶され、前記測定ユニットは第1の測定信号および第2の測定信号を生成するように構成され、前記第1の測定信号および前記第2の測定信号が前記物体の前記センサーに供給され、前記第1の測定信号が前記第1のセンサー信号を誘起し、前記第2の測定信号が前記第2のセンサー信号を誘起するように構成され、さらには電源を備えた確認装置とを含み、該確認装置は、前記患者の体の外面に配置される、システム - 前記確認装置が少なくとも一つの固定部位に配置された場合に、前記確認装置は前記試験モードで作動する請求項1に記載のシステム。
- 前記確認装置が前記少なくとも一つの固定部位に配置するためのガイドを備えた請求項2に記載のシステム。
- 前記確認装置が視覚的ディスプレーを備えた請求項3に記載のシステム。
- 前記確認装置が音声的ディスプレーを備えた請求項4に記載のシステム。
- 前記確認装置が測定の成功を知らせるディスプレーと警告ディスプレーを備えた請求項5に記載のシステム。
- 前記確認装置が前記学習モードを作動させる学習スイッチと前記試験モードを作動させる試験スイッチを備えた請求項6に記載のシステム。
- 前記確認装置が前記学習モードを無力化させるための無力化スイッチを備えた請求項7に記載のシステム。
- 前記メモリー装置がバックアップ電源を備えた請求項8に記載のシステム。
- 前記物体がチューブである請求項1に記載のシステム。
- 前記チューブが出口を備えた請求項10に記載のシステム。
- 前記センサーが前記チューブの前記出口に配置された請求項11に記載のシステム。
- 前記チューブに動作可能に接続され、かつ前記確認装置に動作可能に接続された流体制御装置を備えた請求項12に記載のシステム。
- 前記確認装置に動作可能に接続された呼吸装置を備えた請求項13に記載のシステム。
- 前記センサーが少なくとも一つのセンサーコイルを備え、前記測定ユニットが少なくとも一つの測定コイルを備えた請求項1に記載のシステム。
- 前記測定ユニットが少なくとも一つの超音波変換器を備え、前記センサーが少なくとも一つのトランスポンダーを備えた請求項1に記載のシステム。
- 前記測定センサーが少なくとも一つの磁石を備え、前記測定ユニットが少なくとも一つの磁気計を備えた請求項1に記載のシステム。
- 前記少なくとも一つの磁石が回転可能であり、前記測定ユニットが測定磁石を備えた請求項17に記載のシステム。
- 患者の体内に挿入されたチューブの位置を決定するシステムであって、
出口を備えたチューブであって、該出口に配置されたセンサーを備え、前記センサーが、前記患者の体内に配置されるように構成され、かつ第1のセンサー信号と第2のセンサー信号を供給するものであり、前記患者の体内に挿入されたチューブと、
前記患者の体の外部で使用するための確認装置であって、前記チューブの前記センサーによって供給される前記第1のセンサー信号および前記第2のセンサー信号を受信する測定ユニットを備え、さらにメモリー装置を備え、前記確認装置は、前記チューブの正確な位置を記録する学習モードと前記チューブが前記正確な位置のままにあることを確認する試験モードとでの操作が可能であり、前記学習モードにおいては前記第1のセンサー信号が前記チューブの前記センサーによって供給され、かつ前記測定ユニットによって受信され、前記測定ユニットが前記第1のセンサー信号に基づいて制御べクトルを形成し、該制御ベクトルは前記メモリー装置に記憶され、前記試験モードにおいては前記第2のセンサー信号が前記チューブの前記センサーによって供給され、かつ前記測定ユニットによって受信され、前記測定ユニットが試験ベクトルを形成し、該試験ベクトルは前記患者の体内における前記チューブの位置を確認するために前記制御ベクトルと比較されるように構成された、確認装置と、
前記チューブに動作可能に接続され、かつ前記確認装置に動作可能に接続された流体制御装置と、
前記確認装置と動作可能に接続された呼吸装置とを含む、システム。 - 患者の体内に挿入された物体の位置を決定するシステムであって、
患者の体内に配置されるように構成されたセンサーであって、第1のセンサー信号および第2のセンサー信号を供給するセンサーを含む物体であって、前記患者の体内に挿入されるように構成された物体と、
前記患者の体の外部で使用するための確認装置であって、前記物体の前記センサーによって供給される前記第1のセンサー信号および前記第2のセンサー信号を受信する測定ユニットを備え、さらにメモリー装置を備え、前記確認装置は、前記物体の正確な位置を記録する学習モードと前記物体が前記正確な位置のままにあることを確認する試験モードとでの操作が可能であり、前記学習モードにおいては前記第1のセンサー信号が前記物体の前記センサーによって供給され、かつ前記測定ユニットによって受信され、前記測定ユニットが前記第1のセンサー信号に基づいて制御ベクトルを形成し、該制御ベクトルは前記メモリー装置に記憶され、前記試験モードにおいては前記第2のセンサー信号が前記物体の前記センサーによって供給され、かつ前記測定ユニットによって受信され、前記測定ユニットが試験ベクトルを形成し、該試験ベクトルは前記患者の体内における前記物体の位置を確認するために前記制御ベクトルと比較され、さらに、前記センサーが少なくとも一つのセンサーコイルを備え、前記測定ユニットが少なくとも一つの測定コイルを備えた、確認装置とを含む、システム。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| IL11926296A IL119262A0 (en) | 1996-02-15 | 1996-09-17 | Locatable biopsy needle |
| WO119262 | 1997-02-14 | ||
| WO97/00058 | 1997-02-14 | ||
| PCT/IL1997/000058 WO1997029682A1 (en) | 1996-02-15 | 1997-02-14 | Locatable biopsy needle |
| PCT/IL1997/000308 WO1998011840A1 (en) | 1996-09-17 | 1997-09-15 | Position confirmation with learn and test functions |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2000501018A JP2000501018A (ja) | 2000-02-02 |
| JP2000501018A5 JP2000501018A5 (ja) | 2005-05-12 |
| JP3934159B2 true JP3934159B2 (ja) | 2007-06-20 |
Family
ID=11069307
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP51445898A Expired - Lifetime JP3934159B2 (ja) | 1996-09-17 | 1997-09-15 | 学習および試験機能を有する位置確認 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US6198963B1 (ja) |
| JP (1) | JP3934159B2 (ja) |
| AT (1) | ATE282370T1 (ja) |
| IL (1) | IL125758A (ja) |
| PT (1) | PT926997E (ja) |
Families Citing this family (130)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5881723A (en) | 1997-03-14 | 1999-03-16 | Nellcor Puritan Bennett Incorporated | Ventilator breath display and graphic user interface |
| US6432050B1 (en) * | 1997-12-30 | 2002-08-13 | Remon Medical Technologies Ltd. | Implantable acoustic bio-sensing system and method |
| US6363940B1 (en) * | 1998-05-14 | 2002-04-02 | Calypso Medical Technologies, Inc. | System and method for bracketing and removing tissue |
| US6511417B1 (en) * | 1998-09-03 | 2003-01-28 | Olympus Optical Co., Ltd. | System for detecting the shape of an endoscope using source coils and sense coils |
| US7590441B2 (en) * | 1999-03-11 | 2009-09-15 | Biosense, Inc. | Invasive medical device with position sensing and display |
| US7174201B2 (en) * | 1999-03-11 | 2007-02-06 | Biosense, Inc. | Position sensing system with integral location pad and position display |
| US7549960B2 (en) * | 1999-03-11 | 2009-06-23 | Biosense, Inc. | Implantable and insertable passive tags |
| US7558616B2 (en) * | 1999-03-11 | 2009-07-07 | Biosense, Inc. | Guidance of invasive medical procedures using implantable tags |
| JP2003534035A (ja) * | 2000-03-15 | 2003-11-18 | オーソソフト インコーポレイテッド | コンピュータ支援手術器具の自動校正システム |
| FR2807239B1 (fr) * | 2000-03-31 | 2006-06-16 | Schneider Electric Ind Sa | Detecteur de proximite a apprentissage |
| US7283874B2 (en) | 2000-10-16 | 2007-10-16 | Remon Medical Technologies Ltd. | Acoustically powered implantable stimulating device |
| US6764446B2 (en) | 2000-10-16 | 2004-07-20 | Remon Medical Technologies Ltd | Implantable pressure sensors and methods for making and using them |
| US7024248B2 (en) | 2000-10-16 | 2006-04-04 | Remon Medical Technologies Ltd | Systems and methods for communicating with implantable devices |
| DE60043788D1 (de) * | 2000-11-17 | 2010-03-18 | Calypso Medical Inc | System zur lokalisierung und definition einer zielposition in einem menschlichen körper |
| US20020193685A1 (en) * | 2001-06-08 | 2002-12-19 | Calypso Medical, Inc. | Guided Radiation Therapy System |
| US7135978B2 (en) * | 2001-09-14 | 2006-11-14 | Calypso Medical Technologies, Inc. | Miniature resonating marker assembly |
| US6822570B2 (en) * | 2001-12-20 | 2004-11-23 | Calypso Medical Technologies, Inc. | System for spatially adjustable excitation of leadless miniature marker |
| US6838990B2 (en) | 2001-12-20 | 2005-01-04 | Calypso Medical Technologies, Inc. | System for excitation leadless miniature marker |
| US6812842B2 (en) * | 2001-12-20 | 2004-11-02 | Calypso Medical Technologies, Inc. | System for excitation of a leadless miniature marker |
| US7729742B2 (en) * | 2001-12-21 | 2010-06-01 | Biosense, Inc. | Wireless position sensor |
| CA2478324C (en) | 2002-04-01 | 2011-09-06 | Martin Zimmerling | Reducing effect of magnetic and electromagnetic fields on an implant's magnet and/or electronics |
| US7102508B2 (en) * | 2002-09-09 | 2006-09-05 | Persephone, Inc. | Method and apparatus for locating and tracking persons |
| US7926491B2 (en) * | 2002-12-31 | 2011-04-19 | Calypso Medical Technologies, Inc. | Method and apparatus for sensing field strength signals to estimate location of a wireless implantable marker |
| US7912529B2 (en) * | 2002-12-30 | 2011-03-22 | Calypso Medical Technologies, Inc. | Panel-type sensor/source array assembly |
| US9248003B2 (en) * | 2002-12-30 | 2016-02-02 | Varian Medical Systems, Inc. | Receiver used in marker localization sensing system and tunable to marker frequency |
| US7289839B2 (en) * | 2002-12-30 | 2007-10-30 | Calypso Medical Technologies, Inc. | Implantable marker with a leadless signal transmitter compatible for use in magnetic resonance devices |
| US7247160B2 (en) * | 2002-12-30 | 2007-07-24 | Calypso Medical Technologies, Inc. | Apparatuses and methods for percutaneously implanting objects in patients |
| US20040218792A1 (en) * | 2003-04-29 | 2004-11-04 | Eastman Kodak Company | Probe position measurement to facilitate image registration and image manipulation in a medical application |
| US7613497B2 (en) * | 2003-07-29 | 2009-11-03 | Biosense Webster, Inc. | Energy transfer amplification for intrabody devices |
| US7397364B2 (en) * | 2003-11-11 | 2008-07-08 | Biosense Webster, Inc. | Digital wireless position sensor |
| US8196589B2 (en) * | 2003-12-24 | 2012-06-12 | Calypso Medical Technologies, Inc. | Implantable marker with wireless signal transmitter |
| US7966058B2 (en) * | 2003-12-31 | 2011-06-21 | General Electric Company | System and method for registering an image with a representation of a probe |
| US20050154284A1 (en) * | 2003-12-31 | 2005-07-14 | Wright J. N. | Method and system for calibration of a marker localization sensing array |
| US20050154282A1 (en) * | 2003-12-31 | 2005-07-14 | Wenguang Li | System and method for registering an image with a representation of a probe |
| US7684849B2 (en) * | 2003-12-31 | 2010-03-23 | Calypso Medical Technologies, Inc. | Marker localization sensing system synchronized with radiation source |
| US20050154280A1 (en) * | 2003-12-31 | 2005-07-14 | Wright J. N. | Receiver used in marker localization sensing system |
| US20050154279A1 (en) * | 2003-12-31 | 2005-07-14 | Wenguang Li | System and method for registering an image with a representation of a probe |
| US20050154285A1 (en) * | 2004-01-02 | 2005-07-14 | Neason Curtis G. | System and method for receiving and displaying information pertaining to a patient |
| US20050154286A1 (en) * | 2004-01-02 | 2005-07-14 | Neason Curtis G. | System and method for receiving and displaying information pertaining to a patient |
| WO2005067563A2 (en) * | 2004-01-12 | 2005-07-28 | Calypso Medical Technologies, Inc. | Instruments with location markers and methods for tracking instruments through anatomical passageways |
| JP4691512B2 (ja) * | 2004-02-18 | 2011-06-01 | コーニンクレッカ フィリップス エレクトロニクス エヌ ヴィ | 脈管系におけるカテーテルの位置の確定に対する装置及び方法 |
| US20050209524A1 (en) * | 2004-03-10 | 2005-09-22 | General Electric Company | System and method for receiving and storing information pertaining to a patient |
| US20050228251A1 (en) * | 2004-03-30 | 2005-10-13 | General Electric Company | System and method for displaying a three-dimensional image of an organ or structure inside the body |
| US20050228252A1 (en) * | 2004-04-02 | 2005-10-13 | General Electric Company | Electrophysiology system and method |
| US20050222509A1 (en) * | 2004-04-02 | 2005-10-06 | General Electric Company | Electrophysiology system and method |
| JP5030392B2 (ja) * | 2004-06-14 | 2012-09-19 | オリンパス株式会社 | 医療装置の位置検出システムおよび医療装置誘導システム |
| CA2572019A1 (en) | 2004-06-24 | 2006-01-05 | Calypso Medical Technologies, Inc. | Systems and methods for treating a lung of a patient using guided radiation therapy or surgery |
| JP3950977B2 (ja) * | 2004-06-25 | 2007-08-01 | 国立大学法人東北大学 | 体内埋め込み型リアルタイム式マイクロ線量計装置ならびに測定方法 |
| JP2008507329A (ja) * | 2004-07-23 | 2008-03-13 | カリプソー メディカル テクノロジーズ インコーポレイテッド | 放射線治療及び他の医療用途におけるターゲットの実時間追跡のためのシステム及び方法 |
| US8437449B2 (en) * | 2004-07-23 | 2013-05-07 | Varian Medical Systems, Inc. | Dynamic/adaptive treatment planning for radiation therapy |
| US7899513B2 (en) * | 2004-07-23 | 2011-03-01 | Calypso Medical Technologies, Inc. | Modular software system for guided radiation therapy |
| US8095203B2 (en) * | 2004-07-23 | 2012-01-10 | Varian Medical Systems, Inc. | Data processing for real-time tracking of a target in radiation therapy |
| US9586059B2 (en) * | 2004-07-23 | 2017-03-07 | Varian Medical Systems, Inc. | User interface for guided radiation therapy |
| JP2008507367A (ja) | 2004-07-23 | 2008-03-13 | カリプソー メディカル テクノロジーズ インコーポレイテッド | 患者内のターゲットを治療するための統合放射線治療システム及び方法 |
| EP1771223A4 (en) * | 2004-07-23 | 2009-04-22 | Calypso Med Technologies Inc | DEVICE AND METHOD FOR PERCUTANEOUS OBJECT IMPLANTING IN PATIENTS |
| US20060241397A1 (en) * | 2005-02-22 | 2006-10-26 | Assaf Govari | Reference pad for position sensing |
| US8730011B2 (en) * | 2005-07-14 | 2014-05-20 | Biosense Webster, Inc. | Wireless position transducer with digital signaling |
| WO2007035798A2 (en) | 2005-09-19 | 2007-03-29 | Calypso Medical Technologies, Inc. | Apparatus and methods for implanting objects, such as bronchoscopically implanting markers in the lung of patients |
| JP4931179B2 (ja) * | 2005-11-04 | 2012-05-16 | Hoya株式会社 | 医療用器具振動システム |
| US8936590B2 (en) * | 2005-11-09 | 2015-01-20 | The Invention Science Fund I, Llc | Acoustically controlled reaction device |
| US9028467B2 (en) * | 2005-11-09 | 2015-05-12 | The Invention Science Fund I, Llc | Osmotic pump with remotely controlled osmotic pressure generation |
| US8992511B2 (en) * | 2005-11-09 | 2015-03-31 | The Invention Science Fund I, Llc | Acoustically controlled substance delivery device |
| US20070106277A1 (en) * | 2005-11-09 | 2007-05-10 | Searete Llc, A Limited Liability Corporation Of The State Of Delaware | Remote controller for substance delivery system |
| US9067047B2 (en) * | 2005-11-09 | 2015-06-30 | The Invention Science Fund I, Llc | Injectable controlled release fluid delivery system |
| US8585684B2 (en) * | 2005-11-09 | 2013-11-19 | The Invention Science Fund I, Llc | Reaction device controlled by magnetic control signal |
| US8083710B2 (en) * | 2006-03-09 | 2011-12-27 | The Invention Science Fund I, Llc | Acoustically controlled substance delivery device |
| US8882747B2 (en) * | 2005-11-09 | 2014-11-11 | The Invention Science Fund I, Llc | Substance delivery system |
| US8273071B2 (en) | 2006-01-18 | 2012-09-25 | The Invention Science Fund I, Llc | Remote controller for substance delivery system |
| WO2007061890A2 (en) | 2005-11-17 | 2007-05-31 | Calypso Medical Technologies, Inc. | Apparatus and methods for using an electromagnetic transponder in orthopedic procedures |
| EP1956992B1 (en) * | 2005-12-02 | 2013-03-06 | Koninklijke Philips Electronics N.V. | Automating the ablation procedure to minimize the need for manual intervention |
| US8862200B2 (en) * | 2005-12-30 | 2014-10-14 | DePuy Synthes Products, LLC | Method for determining a position of a magnetic source |
| US20070161888A1 (en) * | 2005-12-30 | 2007-07-12 | Sherman Jason T | System and method for registering a bone of a patient with a computer assisted orthopaedic surgery system |
| US7525309B2 (en) | 2005-12-30 | 2009-04-28 | Depuy Products, Inc. | Magnetic sensor array |
| US8078278B2 (en) * | 2006-01-10 | 2011-12-13 | Remon Medical Technologies Ltd. | Body attachable unit in wireless communication with implantable devices |
| US20080140057A1 (en) * | 2006-03-09 | 2008-06-12 | Searete Llc, A Limited Liability Corporation Of State Of The Delaware | Injectable controlled release fluid delivery system |
| US8021310B2 (en) | 2006-04-21 | 2011-09-20 | Nellcor Puritan Bennett Llc | Work of breathing display for a ventilation system |
| US7650185B2 (en) * | 2006-04-25 | 2010-01-19 | Cardiac Pacemakers, Inc. | System and method for walking an implantable medical device from a sleep state |
| US8197494B2 (en) | 2006-09-08 | 2012-06-12 | Corpak Medsystems, Inc. | Medical device position guidance system with wireless connectivity between a noninvasive device and an invasive device |
| US7784461B2 (en) | 2006-09-26 | 2010-08-31 | Nellcor Puritan Bennett Llc | Three-dimensional waveform display for a breathing assistance system |
| US7769422B2 (en) * | 2006-09-29 | 2010-08-03 | Depuy Products, Inc. | Apparatus and method for monitoring the position of an orthopaedic prosthesis |
| US8068648B2 (en) * | 2006-12-21 | 2011-11-29 | Depuy Products, Inc. | Method and system for registering a bone of a patient with a computer assisted orthopaedic surgery system |
| US20080171941A1 (en) * | 2007-01-12 | 2008-07-17 | Huelskamp Paul J | Low power methods for pressure waveform signal sampling using implantable medical devices |
| WO2008118908A1 (en) * | 2007-03-26 | 2008-10-02 | Remon Medical Technologies, Ltd. | Biased acoustic switch for implantable medical device |
| US20080287776A1 (en) * | 2007-05-16 | 2008-11-20 | Yaron Ephrath | Gastric band with position sensing |
| USPP21537P3 (en) * | 2008-02-26 | 2010-11-30 | Bodegas Y Vinedos Nicolas Catena Sa | Grapevine named ‘Catena Malbec Clone 14’ |
| US8880176B2 (en) * | 2008-05-19 | 2014-11-04 | Nevro Corporation | Implantable neural stimulation electrode assemblies and methods for stimulating spinal neural sites |
| EP2293720B1 (en) | 2008-06-05 | 2021-02-24 | Varian Medical Systems, Inc. | Motion compensation for medical imaging and associated systems and methods |
| US20090312650A1 (en) * | 2008-06-12 | 2009-12-17 | Cardiac Pacemakers, Inc. | Implantable pressure sensor with automatic measurement and storage capabilities |
| US8798761B2 (en) * | 2008-06-27 | 2014-08-05 | Cardiac Pacemakers, Inc. | Systems and methods of monitoring the acoustic coupling of medical devices |
| US20100023091A1 (en) * | 2008-07-24 | 2010-01-28 | Stahmann Jeffrey E | Acoustic communication of implantable device status |
| JP5492903B2 (ja) | 2008-10-27 | 2014-05-14 | カーディアック ペースメイカーズ, インコーポレイテッド | 植込型装置を充電するための方法およびシステム |
| US9943704B1 (en) | 2009-01-21 | 2018-04-17 | Varian Medical Systems, Inc. | Method and system for fiducials contained in removable device for radiation therapy |
| US9119925B2 (en) | 2009-12-04 | 2015-09-01 | Covidien Lp | Quick initiation of respiratory support via a ventilator user interface |
| US8335992B2 (en) | 2009-12-04 | 2012-12-18 | Nellcor Puritan Bennett Llc | Visual indication of settings changes on a ventilator graphical user interface |
| US8924878B2 (en) | 2009-12-04 | 2014-12-30 | Covidien Lp | Display and access to settings on a ventilator graphical user interface |
| US8499252B2 (en) | 2009-12-18 | 2013-07-30 | Covidien Lp | Display of respiratory data graphs on a ventilator graphical user interface |
| US9262588B2 (en) | 2009-12-18 | 2016-02-16 | Covidien Lp | Display of respiratory data graphs on a ventilator graphical user interface |
| EP2521585B1 (en) * | 2010-01-05 | 2021-05-26 | Yeda Research and Development Co. Ltd. | Odor device for preventing snoring or apnea events |
| US20110202104A1 (en) * | 2010-02-17 | 2011-08-18 | Pacesetter, Inc. | Method and system for automatically switching between modes of an implantable medical device based on an external magnetic field |
| DE102010039304A1 (de) * | 2010-08-13 | 2012-02-16 | Siemens Aktiengesellschaft | Befestigungsvorrichtung für eine Mitralklappe und Verfahren |
| US8444653B2 (en) * | 2010-08-30 | 2013-05-21 | Biomet Manufacturing Corp. | Intramedullary rod implantation system |
| EP2613687B1 (en) * | 2010-09-08 | 2016-11-02 | Covidien LP | Catheter with imaging assembly |
| US8965482B2 (en) | 2010-09-30 | 2015-02-24 | Nevro Corporation | Systems and methods for positioning implanted devices in a patient |
| US8805519B2 (en) | 2010-09-30 | 2014-08-12 | Nevro Corporation | Systems and methods for detecting intrathecal penetration |
| US9545506B2 (en) | 2010-10-01 | 2017-01-17 | Varian Medical Systems, Inc. | Delivery catheter for and method of delivering an implant, for example, bronchoscopically implanting a marker in a lung |
| EP2763743A4 (en) | 2011-10-04 | 2015-08-05 | Nevro Corp | MODELING POSITIONS OF DEVICES IMPLEMENTED IN A PATIENT |
| ES2829585T3 (es) | 2012-01-25 | 2021-06-01 | Nevro Corp | Anclajes de cables y sistemas y métodos asociados |
| US8676331B2 (en) | 2012-04-02 | 2014-03-18 | Nevro Corporation | Devices for controlling spinal cord modulation for inhibiting pain, and associated systems and methods, including controllers for automated parameter selection |
| US10362967B2 (en) | 2012-07-09 | 2019-07-30 | Covidien Lp | Systems and methods for missed breath detection and indication |
| US9517184B2 (en) | 2012-09-07 | 2016-12-13 | Covidien Lp | Feeding tube with insufflation device and related methods therefor |
| US9265935B2 (en) | 2013-06-28 | 2016-02-23 | Nevro Corporation | Neurological stimulation lead anchors and associated systems and methods |
| CN106535811A (zh) | 2014-01-24 | 2017-03-22 | 伊卢森特医药公司 | 包括定位剂的系统和方法 |
| US9919165B2 (en) | 2014-05-07 | 2018-03-20 | Varian Medical Systems, Inc. | Systems and methods for fiducial to plan association |
| US10043284B2 (en) | 2014-05-07 | 2018-08-07 | Varian Medical Systems, Inc. | Systems and methods for real-time tumor tracking |
| AU2015264561B2 (en) | 2014-05-20 | 2020-02-20 | Nevro Corporation | Implanted pulse generators with reduced power consumption via signal strength/duration characteristics, and associated systems and methods |
| US9950129B2 (en) | 2014-10-27 | 2018-04-24 | Covidien Lp | Ventilation triggering using change-point detection |
| US9730764B2 (en) * | 2015-10-02 | 2017-08-15 | Elucent Medical, Inc. | Signal tag detection components, devices, and systems |
| WO2017059228A1 (en) | 2015-10-02 | 2017-04-06 | Elucent Medical, Inc. | Signal tag detection components, devices, and systems |
| US10300277B1 (en) | 2015-12-14 | 2019-05-28 | Nevro Corp. | Variable amplitude signals for neurological therapy, and associated systems and methods |
| EP3435874B8 (en) | 2016-03-31 | 2020-04-01 | Koninklijke Philips N.V. | Wireless position determination |
| EP3496623B1 (en) | 2016-08-12 | 2023-11-01 | Elucent Medical, Inc. | Surgical device guidance and monitoring systems |
| WO2018165391A1 (en) | 2017-03-09 | 2018-09-13 | Nevro Corp. | Paddle leads and delivery tools, and associated systems and methods |
| EP3737459A4 (en) | 2018-01-30 | 2021-10-20 | Nevro Corp. | EFFICIENT USE OF AN IMPLANTABLE PULSE GENERATOR BATTERY AND RELATED SYSTEMS AND PROCEDURES |
| EP3758793A4 (en) | 2018-03-29 | 2021-12-08 | Nevro Corp. | PIPES WITH SIDE PANEL OPENINGS AND ASSOCIATED SYSTEMS AND PROCEDURES |
| US10278779B1 (en) | 2018-06-05 | 2019-05-07 | Elucent Medical, Inc. | Exciter assemblies |
| US11058875B1 (en) | 2018-09-19 | 2021-07-13 | Nevro Corp. | Motor function in spinal cord injury patients via electrical stimulation, and associated systems and methods |
| US11590352B2 (en) | 2019-01-29 | 2023-02-28 | Nevro Corp. | Ramped therapeutic signals for modulating inhibitory interneurons, and associated systems and methods |
| CN110575254A (zh) * | 2019-10-19 | 2019-12-17 | 树兰(杭州)医院有限公司 | 基于电磁技术的输液港导管头端定位装置及其使用方法 |
| US11672934B2 (en) | 2020-05-12 | 2023-06-13 | Covidien Lp | Remote ventilator adjustment |
| US20220211315A1 (en) | 2021-01-04 | 2022-07-07 | Biosense Webster (Israel) Ltd. | Local activation driver classification mapping in atrial fibrillation |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0357314B1 (en) | 1988-09-02 | 1993-09-22 | British Gas plc | Device for controlling the position of a self-propelled drilling tool |
| US4905698A (en) | 1988-09-13 | 1990-03-06 | Pharmacia Deltec Inc. | Method and apparatus for catheter location determination |
| US5099548A (en) | 1990-08-17 | 1992-03-31 | Loosli Curtis G | Quick splice for rod belt conveyor |
| US5645065A (en) | 1991-09-04 | 1997-07-08 | Navion Biomedical Corporation | Catheter depth, position and orientation location system |
| US5425367A (en) | 1991-09-04 | 1995-06-20 | Navion Biomedical Corporation | Catheter depth, position and orientation location system |
| US5325873A (en) | 1992-07-23 | 1994-07-05 | Abbott Laboratories | Tube placement verifier system |
| ES2115776T3 (es) | 1992-08-14 | 1998-07-01 | British Telecomm | Sistema de localizacion de posicion. |
| US5375596A (en) | 1992-09-29 | 1994-12-27 | Hdc Corporation | Method and apparatus for determining the position of catheters, tubes, placement guidewires and implantable ports within biological tissue |
| JP3898754B2 (ja) * | 1993-07-01 | 2007-03-28 | ボストン サイエンティフィック リミテッド | 像形成、電位検出型及び切除カテーテル |
| US5391199A (en) | 1993-07-20 | 1995-02-21 | Biosense, Inc. | Apparatus and method for treating cardiac arrhythmias |
| US5425382A (en) | 1993-09-14 | 1995-06-20 | University Of Washington | Apparatus and method for locating a medical tube in the body of a patient |
| US5558091A (en) | 1993-10-06 | 1996-09-24 | Biosense, Inc. | Magnetic determination of position and orientation |
| ES2210662T3 (es) | 1994-08-19 | 2004-07-01 | Biosense, Inc. | Sistemas medicos de diagnosis, de tratamiento y de imagen. |
| EP0845959A4 (en) | 1995-07-16 | 1998-09-30 | Ultra Guide Ltd | HAND-FREE DRAWING A NEEDLE GUIDE |
| US5715822A (en) | 1995-09-28 | 1998-02-10 | General Electric Company | Magnetic resonance devices suitable for both tracking and imaging |
-
1997
- 1997-02-14 IL IL12575897A patent/IL125758A/xx not_active IP Right Cessation
- 1997-09-15 PT PT97940317T patent/PT926997E/pt unknown
- 1997-09-15 AT AT97940317T patent/ATE282370T1/de not_active IP Right Cessation
- 1997-09-15 JP JP51445898A patent/JP3934159B2/ja not_active Expired - Lifetime
-
1998
- 1998-05-14 US US09/079,338 patent/US6198963B1/en not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| US6198963B1 (en) | 2001-03-06 |
| IL125758A0 (en) | 1999-04-11 |
| IL125758A (en) | 2003-07-06 |
| ATE282370T1 (de) | 2004-12-15 |
| JP2000501018A (ja) | 2000-02-02 |
| PT926997E (pt) | 2005-02-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3934159B2 (ja) | 学習および試験機能を有する位置確認 | |
| EP0926997B1 (en) | Position confirmation with learn and test functions | |
| ES2208963T3 (es) | Endoprotesis vascular sensible a la presion. | |
| EP2598090B1 (en) | System for prediction of obstructive sleep apnea | |
| EP1530947B1 (en) | Digital wireless position sensor | |
| EP2046434B1 (en) | Medicament delivery system | |
| US8285399B2 (en) | Present invention is directed to a feeding tube in particular for total parental nutrition and/or medicine dosing | |
| US20200129087A1 (en) | Implantable Sensors for Vascular Monitoring | |
| RU2522970C2 (ru) | Следящая система, аппаратура и способ позиционирования для беспроводного мониторинга уровня ph в пищеводе | |
| KR20080101781A (ko) | 위치 감지기능을 갖는 위 밴드 | |
| US20230355076A1 (en) | Manometry systems | |
| AU2015218521B2 (en) | Diagnosis and prediction of obstructive sleep apnea |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20040914 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20040914 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20060801 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20061101 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20061218 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20061214 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20070213 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20070315 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110330 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110330 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120330 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130330 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130330 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140330 Year of fee payment: 7 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| EXPY | Cancellation because of completion of term |