JP3851876B2 - 収穫機の刈取り部対地高さ検出装置 - Google Patents
収穫機の刈取り部対地高さ検出装置 Download PDFInfo
- Publication number
- JP3851876B2 JP3851876B2 JP2003017433A JP2003017433A JP3851876B2 JP 3851876 B2 JP3851876 B2 JP 3851876B2 JP 2003017433 A JP2003017433 A JP 2003017433A JP 2003017433 A JP2003017433 A JP 2003017433A JP 3851876 B2 JP3851876 B2 JP 3851876B2
- Authority
- JP
- Japan
- Prior art keywords
- cutting
- height
- ground
- frame
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images







Landscapes
- Outside Dividers And Delivering Mechanisms For Harvesters (AREA)
- Harvester Elements (AREA)
Description
【発明の属する技術分野】
本発明は、分草フレームに対して上下揺動自在な接地センサー、及び、この接地センサーの揺動角に基づいて刈取り部の対地高さを検出する検出部を備えてある収穫機の刈取り部対地高さ検出装置に関する。
【0002】
【従来の技術】
収穫機において、刈取り部の対地高さを検出する検出装置を設け、この対地高さ検出装置による検出高さが設定高さ以下になれば、刈取り部を走行機体に対して自動的に上昇させる制御が実行されるように構成するとか、対地高さ検出装置による検出結果に基づいて刈取り部の対地高さが設定範囲内になるように、刈取り部を走行機体に対して自動的に昇降させる制御が実行されるように構成し、走行機体が前後に傾斜するなどしても、刈取り部の分草具が地面に突っ込むことを回避するとか、刈取装置による刈り高さを設定高さに維持しながら作業できるようにされることがある。
【0003】
刈取り部の対地高さを接地センサーによって検出するようになった検出装置として、従来、たとえば特許文献1に示されるものがあった。
すなわち、接地センサーを、分草フレームとしての刈取り支持フレームの先端部に対して、横軸芯まわりに上下揺動可能に枢支した状態で設け、接地センサーの上下揺動変位を検出する検出部としてのポテンショメータを設けたものがあった。
【0004】
【特許文献1】
実開昭58−26821号公報(第4−5頁、第2図)
【0005】
【発明が解決しようとする課題】
【0006】
【0007】
【課題を解決するための手段】
請求項1による発明の構成は、次のとおりである。
【0008】
〔構成〕
分草フレームに対して上下揺動自在な接地センサー、及び、この接地センサーの揺動角に基づいて刈取り部の対地高さを検出する検出部を備えてある収穫機の刈取り部対地高さ検出装置において、前記検出部を前記分草フレームの上方に配備し、前記接地センサーを、その揺動支点側が前記分草フレームを迂回して、その接地作用部が前記分草フレームの 直下に位置するように、屈曲形成してある。
【0009】
【0010】
【0011】
請求項2による発明の構成は、次のとおりである。
【0012】
〔構成〕
請求項1による発明の構成において、前記接地センサーを、前記分草フレームの前端に備えた分草具の左右幅内に収まるように構成してある。
【0013】
【0014】
【0015】
【発明の実施の形態】
【0016】
図1に示すように、クローラ式走行装置1によって自走し、運転座席2が装備された搭乗型の運転部、運転座席2の下方に位置するエンジン(図示せず)が備えられた原動部を有した自走機体の機体フレーム3の前部に位置する支持部4に、刈取り部10の前処理部フレーム11の基端側を機体横向きの軸芯まわりで回動自在に連結するとともに、前記機体フレーム3の後端側に脱穀装置5および穀粒タンク6を設けて、コンバインを構成してある。
【0017】
このコンバインは、稲・麦などの穀粒を収穫するものであり、前記前処理部フレーム11にリンク機構7を介してシリンダロッドが連結している油圧式のリフトシリンダ8を操作すると、このリフトシリンダ8が前処理部フレーム11を上下に揺動操作して刈取り部10を地面上近くまで下降した作業位置と、地面上から高く浮上した上昇非作業位置とに昇降操作する。刈取り部10を下降作業位置にして自走機体を走行させると、刈取り部10が複数の植付け条の刈取り対象の植立茎稈を機体横方向に並ぶ複数個の分草具12によって分草して機体横方向に並ぶ複数の引起装置13のうちの対応するものに案内し、各引起装置13の上昇移動する引起し爪(図示せず)によって引起し処理するとともにバリカン型の刈取装置14によって刈取り、刈取り穀稈を株元側に作用する挟持搬送装置と穂先側に作用する係止搬送装置とで成る搬送装置17によって機体後方側に搬送し、脱穀装置5が搬送装置17からの刈取穀稈を脱穀フィードチェン5aによって機体後方向きに搬送しながら穂先側を扱室(図示せず)に供給して脱穀処理し、穀粒タンク6が脱穀装置5からの脱穀粒を回収して貯留していく。
【0018】
刈取り部10についてさらに詳述すると、図1、図2などに示す如く構成してある。
すなわち、機体フレーム3の前記支持部4に基端側が回動自在に連結している機体前後向きの伝動ケースで成るメインフレーム11a、及び、このメインフレーム11aの先端部に中間部が連結している機体横向きの伝動ケース15などによって前記前処理部フレーム11を構成してある。前記横向き伝動ケース15が備えている支持部材15aの機体横方向での複数箇所から分草フレーム16を機体前方向きに延出させて、隣接し合う一対の分草フレーム16によって穀稈引起し経路18を形成し、各分草フレーム16の先端部に前記分草具12を固定し、各穀稈引起し経路18の横側に前記引起装置13を配置し、前記複数本の分草フレーム16の基端部にわたって前記刈取装置14を取り付けてある。
【0019】
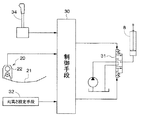
図2などに示すように、刈取り部10の前記複数個の分草具12のうちの最も機体横外側に位置する分草具12のやや後側に、接地センサー21を利用して刈取り部10の対地高さを検出する刈取り部対地高さ検出装置20を設けてある。図8に示すように、前記刈取り部対地高さ検出装置20の検出部22を連係させた制御手段30に、前記リフトシリンダ8の制御弁31の電磁操作部、運転部に設けた刈高さ設定手段32を連係させてある。
【0020】
刈高さ設定手段32は、人為操作自在なポテンショメータで成り、刈高さ制御によって維持させるべき刈取装置14の刈高さを変更自在に設定し、この設定刈高さを電気信号にして制御手段30に出力するようになっている。
【0021】
前記制御手段30は、マイクロコンピュータを利用して成り、刈取り部対地高さ検出装置20による検出情報、及び、刈高さ設定手段32による設定情報に基づいてリフトシリンダ8を自動的に操作する刈高さ制御を実行するようになっている。すなわち、刈取り部対地高さ検出装置20による検出高さが刈高さ設定手段32による設定刈高さから外れると、制御弁31にリフトシリンダ8を操作させるべき信号を出力することによってリフトシリンダ8を刈取り部10の上昇側や下降側に操作し、このために刈取り部10が上昇するとか下降して刈取り部対地高さ検出装置20が刈高さ設定手段32による設定刈高さに対応する対地高さを検出する状態になると、制御弁31にリフトシリンダ8を停止させるべき信号を出力することにより、リフトシリンダ8を停止操作して刈取り部10の上昇や下降を停止させるようになっている。
【0022】
これにより、収穫作業を行なうに当たり、制御手段30による刈高さ制御をオンに切り換えておく。すると、刈取り部対地高さ検出装置20による検出高さが刈高さ設定手段32による設定刈高さになるように刈取り部10を自動的に昇降操作する刈高さ制御が行なわれ、走行地面の凹凸や傾斜のために自走機体が前後方向に傾斜しても刈取装置14の対地高さが設定高さ又はそれに近いものに維持され、切り株の高さが設定刈高さ又はそれに近いものになる状態で作業できる。
【0023】
図8に示す昇降レバー34は、運転部に人為操作するように設けられ、操作されると刈取り部10を上昇や下降させる指令を制御手段30に出力することによって刈取り部10を上昇操作や下降操作させるものである。すなわち、刈取り部10を人為的に昇降操作するものである。制御手段30は、前記昇降レバー34が操作されて上昇や下降し指令を入力した場合、刈取り部対地高さ検出装置20による検出結果に優先して制御弁31を切り換え操作してリフトシリダ8を刈取り部10の上昇側や下降側に操作するようになっている。
【0024】
図2、図3などに示すように、前記刈取り部対地高さ検出装置20は、前記複数個の分草具12のうち、運転部が位置する側とは反対側の最も機体横外側に位置する分草具12の後側近くで、この分草具12を支持する前記分草フレーム16の先端部に分草具12を取付けるように設けた平板状の分草具支持部16aに固定したギヤケース40、このギヤケース40の下部の横側面がわに基端側が連結している前記接地センサー21、前記ギヤケース40の上部の横側面がわに取付けた前記検出部22を備えて構成してある。
【0025】
接地センサー21は、前端側に取付け片部21cを備えるように、中間部に前端部21bや後端側より機体下方向きに突出した接地作用部21aを備えるように曲げ成形した帯板ばねで構成し、そして、接地作用部21aや後端側など接地センサー21のほとんど全体が分草フレーム16の直下に位置するように配置した状態で取付け部21cを、前記ギヤケース40の入力軸に兼用の回転支軸41に一体回転自在に連結することにより、ギヤケース40に支持させてある。これにより、接地センサー21は、前記回転支軸41の機体横向きの軸芯Xまわりで分草フレーム16に対して上下揺動するようになっている。
【0026】
図6などに示すように、検出部22は、本体が前記ギヤケース40の側面がわに固定され、入力軸22aが前記ギヤケース40の内部に入り込んでいる回転式のポテンショメータによって構成してある。
【0027】
図5、図6に示すように、ギヤケース40の前記回転支軸41に対して取り付け部42aが外嵌している扇形ギヤ42と、この扇形ギヤ42に噛合った状態で前記入力軸22aに対して外嵌している円形ギヤ43とで成るギヤ連動機構44を、ギヤケース40の内部に設けてある。扇形ギヤ42の取付け部42aは、回転支軸41の横断面非円形のためにこの回転支軸41に対して一体回動自在に係合している。円形ギヤ43は、前記入力軸22aの横断面非円形のためにこの入力軸22aに対して一体回動自在に係合している。扇形ギヤ42のピッチ円直径が円形ギヤ43のピッチ円直径より大である。これにより、ギヤ連動機構44は、接地センサー21を上下揺動自在に支持している回転支軸41の回転が増速して検出部22の入力軸22aに伝達するようにして回転支軸41を入力軸22aに連動させている。
【0028】
前記ギヤケース40の内部に、コイル部が前記回転支軸41に外嵌している巻きばねで成るセンサーばね46を設けてある。このセンサーばね46は、扇形ギヤ42を介して回転支軸41を回動付勢することにより、接地センサー21の接地作用部21aが確実に接地作用するように接地センサー21を下降側に揺動付勢している。
【0029】
これにより、刈取り部対地高さ検出装置20は、次の如く作動する。
すなわち、刈取り部10の対地高さが変化して分草フレーム16の対地高さが変化すると、接地センサー21は、これの接地作用部21aに作用する接地反力であるとか、接地センサー21の前記センサーばね46による下降力のために、さらには、接地センサー21の後端側が分草フレーム16に当接して接地センサー21が接地反力のために弾性変形して備える下降力のために、接地センサー21が軸芯Xまわりで分草フレーム16に対して上昇揺動するとか下降揺動する。すると、接地センサー21の回転がギヤ連動機構44によって増速して検出部22の入力軸22aに伝達されて検出部22が作動する。これにより、検出部22において、接地センサー21の分草フレーム16に対する揺動角に基づいて刈取り部10の対地高さを検出してこの検出結果に基づいて刈取装置14の対地高さを検出し、この検出結果を電気信号にして制御手段30に出力する。
【0030】
図3などに示すように、分草フレーム16の基端側に、U字状に曲げ成形した屈曲丸棒材を取付けて接地センサー21に対する係合部65を設けてある。図7(イ)に示すように、この係合部65には、接地センサー21の後端側に横幅W1が接地作用部21aの横幅W2〔図4、図7(ロ))より狭くなるようにして設けた係止部21dが摺動自在に入り込んでおり、係合部65は、接地センサー21の遊端側が分草フレーム16に対して横ずれしようとしても、左右一対の機体上下向きの縦辺部65aで係止部21dに係合作用し、縦辺部65aどうしの間隔が係止部21dの横幅W1より大であることに起因してセンサー遊端側がずれ動くストローク以上はずれ動かないようにその横ずれを規制するように構成してある。
【0031】
すなわち、接地センサー21が地面上を横滑りして隆起部に引っ掛かるなどしても、係合部65が接地センサー21に大きな捩れが発生しにくいように接地センサー21の遊端側を受け止め係止する。これにより、接地センサー21が地面上を横滑りしても、接地センサー21及び回転支軸41などに無理な曲げ力などが掛かることが防止される。
【0032】
〔別実施形態〕
上記実施形態の如く自走機体の前後傾斜にかかわらず刈取装置14の対地高さが設定範囲になるように、刈取り部対地高さ検出装置20による検出結果に基づいてリフトシリンダ8が刈取り部10の上昇側や下降側に自動的に操作されるように構成する他、分草具12の地面に対する突っ込みを防止するように、刈取り部対地高さ検出装置20による検出結果に基づいてリフトシリンダ8が刈取り部10の上昇側に自動的に操作されるように構成する場合にも本発明は適用できる。
【0033】
刈取り部対地高さ検出装置20は、上記実施形態の如く運転部とは反対側の最も機体横端に位置する分草具12の後方に配置する他、運転部側の最も横端に位置する分草具12の後方であるとか、その両横端に位置する分草具12よりも機体内側に位置する分草具12の後方に配置して実施してもよい。
【0034】
本発明は、コンバインの他、玉ねぎ、人参などを各種の作物を収穫対象とする作業車にも適用できるのであり、これらの作業車やコンバインなどを総称して収穫機と呼称する。
【図面の簡単な説明】
【図1】 コンバイン前部の側面図
【図2】 刈取り部の主フレーム及び対地高さ検出装置を示す斜視図
【図3】 刈取り部対地高さ検出装置の側面図
【図4】 刈取り部対地高さ検出装置の平面図
【図5】 ギヤケースの断面図
【図6】 ギヤ連動機構の断面図
【図7】 (イ)は、分草フレームの係合部配設部での断面図、(ロ)は、接地センサーの接地作用部での横幅を示す断面図
【図8】 ブロック図
【符号の説明】
10 刈取り部
12 分草具
16 分草フレーム
21 接地センサー
21a 接地作用部
22 検出部
Claims (2)
- 分草フレームに対して上下揺動自在な接地センサー、及び、この接地センサーの揺動角に基づいて刈取り部の対地高さを検出する検出部を備えてある収穫機の刈取り部対地高さ検出装置であって、
前記検出部を前記分草フレームの上方に配備し、
前記接地センサーを、その揺動支点側が前記分草フレームを迂回して、その接地作用部が前記分草フレームの直下に位置するように、屈曲形成してある収穫機の刈取り部対地高さ検出装置。 - 前記接地センサーを、前記分草フレームの前端に備えた分草具の左右幅内に収まるように構成してある請求項1記載の収穫機の刈取り部対地高さ検出装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003017433A JP3851876B2 (ja) | 2003-01-27 | 2003-01-27 | 収穫機の刈取り部対地高さ検出装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003017433A JP3851876B2 (ja) | 2003-01-27 | 2003-01-27 | 収穫機の刈取り部対地高さ検出装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004222667A JP2004222667A (ja) | 2004-08-12 |
| JP3851876B2 true JP3851876B2 (ja) | 2006-11-29 |
Family
ID=32904586
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003017433A Expired - Fee Related JP3851876B2 (ja) | 2003-01-27 | 2003-01-27 | 収穫機の刈取り部対地高さ検出装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3851876B2 (ja) |
-
2003
- 2003-01-27 JP JP2003017433A patent/JP3851876B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2004222667A (ja) | 2004-08-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2011200188A (ja) | コンバイン | |
| JP2011177075A (ja) | コンバイン | |
| JP5155789B2 (ja) | 普通型コンバイン | |
| JP2005095045A (ja) | 収穫機の刈取り部対地高さ検出装置 | |
| JP2011188747A (ja) | コンバイン | |
| JP3851876B2 (ja) | 収穫機の刈取り部対地高さ検出装置 | |
| JP4940943B2 (ja) | 収穫機 | |
| JP3828085B2 (ja) | 収穫機の刈取り部対地高さ検出装置 | |
| JP3850376B2 (ja) | 収穫機の刈取り部対地高さ検出装置 | |
| JP3850372B2 (ja) | 収穫機の刈取り部対地高さ検出装置 | |
| JP4769217B2 (ja) | 刈取収穫機の刈取昇降制御装置 | |
| JP4101139B2 (ja) | 収穫機 | |
| JP3828062B2 (ja) | 収穫機の刈取り部対地高さ検出装置 | |
| JP2004283008A (ja) | 収穫機 | |
| JP4107591B2 (ja) | 刈取収穫機 | |
| JP5330781B2 (ja) | 普通型コンバイン | |
| JP2004097076A (ja) | 刈取り収穫機 | |
| JP2005253334A (ja) | 刈取収穫機 | |
| JP2003153629A (ja) | コンバイン | |
| US20020084083A1 (en) | Cutter bar on a tillage implement | |
| JP4004421B2 (ja) | 茎稈引起し装置 | |
| JPS6041068Y2 (ja) | 刈取機の刈高制御機構 | |
| JP2005253337A (ja) | 刈取収穫機 | |
| JP5463122B2 (ja) | 作業機 | |
| JP4832395B2 (ja) | コンバインの刈取り部昇降構造 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050315 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20060525 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060720 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20060824 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20060904 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090908 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100908 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110908 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120908 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120908 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130908 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130908 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140908 Year of fee payment: 8 |
|
| LAPS | Cancellation because of no payment of annual fees |