JP3841237B2 - ロボットおよびその負荷支持方法 - Google Patents
ロボットおよびその負荷支持方法 Download PDFInfo
- Publication number
- JP3841237B2 JP3841237B2 JP13731097A JP13731097A JP3841237B2 JP 3841237 B2 JP3841237 B2 JP 3841237B2 JP 13731097 A JP13731097 A JP 13731097A JP 13731097 A JP13731097 A JP 13731097A JP 3841237 B2 JP3841237 B2 JP 3841237B2
- Authority
- JP
- Japan
- Prior art keywords
- robot arm
- stopper
- actuator
- robot
- contact
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images

Landscapes
- Manipulator (AREA)
Description
【発明の属する技術分野】
本発明は、マニピュレータ等の関節駆動に適用して、その可動範囲を機械的に制限するロボットの動作制限装置及び方法に関する。
【0002】
【従来の技術】
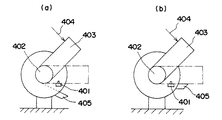
従来、アクチュエータの可動範囲限界での可動範囲の制限は、図4に示すようになっている。図において、401はリミットスイッチ、402は回転軸、403はロボットアーム、404は負荷、405はロボットアームのストッパである。
通常、リミットスイッチ401及びストッパ405の配置は、図4(a)に示すようになり、回転軸402に固定されたロボットアーム403が可動範囲限界に達した時リミットスイッチ401が作動する。リミットスイッチ401の作動信号は上位制御装置に送られ、リミットスイッチ401を越えてロボットアーム403が動作しないように速度指令の場合には指令を0に、位置指令の場合には指令を固定する。ストッパ405は、安全対策等のために設けられたものであり、何らかの原因でリミットスイッチ401が作動しなかった場合、または、負荷404が回転軸402においてアクチュエータの持つ最大定格トルクを越える負荷であった場合に対応して最終的にロボットアーム403を停止させるものである。
また、図4(b)に示すようなリミットスイッチ401及びストッパ405の配置も考えられる。
【0003】
【発明が解決しようとする課題】
ところが、従来技術では、リミットスイッチ及びストッパの配置が図4(a)に示すような場合、ロボットアームが可動範囲限界を越えて動作しないようにするため、アクチュエータへの指令を供給し続けなければならないという問題があった。また、何らかの原因でリミットスイッチが作動しなかった場合、または、指令を供給し続けていてもロボットアームに過負荷が発生した場合、ロボットアームが可動範囲限界を越えて動作してしまうという問題があった。
また、リミットスイッチ及びストッパの配置が図4(b)に示すような場合、ロボットアームがストッパに接触した時にリミットスイッチが作動できるようにするため、リミットスイッチの取り付け位置を調整しなければならず、その調整作業に手間と時間がかかるという問題があった。
そこで、本発明は、可動範囲限界にロボットアームが達してもアクチュエータへの指令を供給し続けるということがなく、また、アクチュエータの持つ最大定格トルクを越えた負荷にも対応できるようにし、さらに、ストッパの取り付け位置を微調整することのないロボットの動作制限装置及び方法を提供することを目的とする。
【0004】
【課題を解決するための手段】
上記問題を解決するため、本発明のロボットの動作制限装置は、ロボットアームの運動を制限するための機械的なストッパを持つロボットの動作制限装置において、前記ストッパに前記ロボットアームが接触したときに感応する感圧センサを設け、かつ前記感圧センサが前記ロボットアームの接触を感知したときにロボットアームのアクチュエータに供給するトルク指令を切断する手段を備えたものである。
また、本発明のロボットの動作制限方法は、ロボットアームの運動を制限するための機械的なストッパを持ち、前記ストッパに接触力を検出する機能を備えたロボットの動作制限方法において、前記ロボットアームが前記ストッパに接触した時、接触力を検出し、その接触力に応じて前記ロボットアームのアクチュエータに供給するトルク指令を切断するようにしたものである。
上記手段により、可動範囲限界にロボットアームが達した場合、感圧センサが接触を検出するので、感圧センサの設置位置の微調整などは不要であり、また接触を検出した時点でトルク指令を切断でき、無駄な指令を供給する必要がない。
さらに、ストッパによりロボットアームの運動を制限することができるので、アクチュエータの持つ最大定格トルクを越える負荷でも支持できる。
【0005】
【発明の実施の形態】
以下、本発明の実施の形態を図に基づいて説明する。
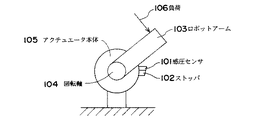
図1は本発明の実施例に係るストッパ付きアクチュエータの構造説明図である。図に示すように、本実施例は、アクチュエータ本体105と、ストッパ102と、ストッパ102に固定された感圧センサ101と、回転軸104と、回転軸104に固定されたロボットアーム103とを備えている。感圧センサ101は、例えば感圧導電ゴム等の周知のセンサを用いることができる。
図1において、アクチュエータにトルク指令が供給されると回転軸104が回転し、ロボットアーム103が運動する。ロボットアーム103の可動範囲限界にロボットアーム103が達すると感圧センサ101に接触する。感圧センサ101はその接触情報を出力することができる。従って、本実施例では、ロボットアーム103が可動範囲限界に達した場合、ロボットアーム103と感圧センサ101との接触情報を出力することができる。また、ストッパ102によりロボットアーム103は、負荷106が回転軸104においてアクチュエータの最大定格トルクを越える負荷であっても可動範囲を越えずに運動を停止することができる。
【0006】
【課題を解決するための手段】
上記課題を解決するため、本発明は、次のように構成したのである。
請求項1に記載の発明は、ロボットアームの運動を制限するための機械的なストッパと、前記ストッパの前記ロボットアーム接触部に固定されて前記ロボットアームが接触したときに感応する感圧センサと、前記ロボットアームのアクチュエータに供給するトルク指令を切断するトルク指令切断手段と、を備えたロボットにおいて、前記感圧センサが前記ロボットアームの接触を感知したとき、前記トルク指令切断手段が、前記トルク指令を切断するとともに、前記ストッパが前記ロボットアームに作用する負荷を支持することを特徴とするものである。
また、請求項2に記載の発明は、ロボットアームの運動を制限するための機械的なストッパと、前記ストッパに固定されて前記ロボットアームが接触したときに感応する感圧センサと、を備えたロボットにおいて、前記感圧センサが前記ロボットアームの接触を感知したとき、前記ロボットアームのアクチュエータに供給するトルク指令を切断し、前記ストッパが前記ロボットアームに作用する負荷を支持することを特徴とするものである。
【0007】
図3は本発明の実施例に係るストッパ付きアクチュエータを用いた適用例の構成図である。本実施例は、マニピュレータベース303と第1のアクチュエータ304と第2のアクチュエータ305と第3のアクチュエータ306とから構成されるマニピュレータ部301と、第3のアクチュエータに接続されたストッパ付きのアクチュエータ本体105で構成されるハンド部302とで構成される。ハンド部302のアクチュエータ本体105は、ストッパ102と、ストッパ102に固定された感圧センサ101と、回転軸104と、回転軸104に固定されたロボットアーム103とを備えている。図では支持物体312をハンド部302で、すなわち、アクチュエータ本体105のロボットアーム103で支持している。一般にハンド部302で使用されるアクチュエータの定格最大トルクは、マニピュレータ部301で使用されるアクチュエータの定格最大トルクよりも小さい。従ってロボットアーム103で支持できる物体の重量はハンド部302で構成されるアクチュエータの最大定格トルクで決定される。ところが、本実施例では、ハンド部302にストッパ付きのアクチュエータ本体105を使用しているため、支持物体312の重量が回転軸104においてアクチュエータ本体105の持つ最大定格トルクを越える負荷であっても、ストッパ102によりロボットアーム103が支持物体312を支持する。更に、この時、感圧センサ101により圧力情報が検出されるので、アクチュエータ本体105にトルク指令を供給する必要がなく効率的である。なお、マニピュレータ部301のアクチュエータも必要に応じてストッパ付きのアクチュエータを使用してもよい。
上述した実施例では、アクチュエータとして回転軸を備えたものを使用していたが、本発明はこれに限るものではなく、直動軸を備えたアクチュエータを使用してもよい。
【0008】
【発明の効果】
以上述べたように、本発明によれば、可動範囲を制限することのできるストッパと、ロボットアームとストッパとの接触を検出する機能と、感圧センサが前記ロボットアームの接触を感知したときにロボットアームのアクチュエータに供給するトルク指令を切断する手段を備えたため、感圧センサをストッパに装着するだけで位置決めや微調整の問題がなく、またストッパとの接触を検出した時点で指令を切断でき、無駄な指令を供給することがないという効果がある。
さらに、機械的なストッパによりロボットアームを支持するため、アクチュエータの持つ最大定格トルクを越えた負荷でも支持できるという効果がある。
【図面の簡単な説明】
【図1】 本発明の実施例に係るストッパ付きアクチュエータの構造説明図である。
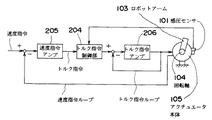
【図2】 本発明の実施例に係るストッパ付きアクチュエータのブロック図である。
【図3】 本発明の実施例に係るストッパ付きアクチュエータを用いた適用例の構成図である。
【図4】 従来のアクチュエータの可動範囲限界での可動範囲制限を示す概念図である。
【符号の説明】
101 感圧センサ、102 ストッパ、103 ロボットアーム、104 回転軸、105 アクチュエータ本体、106 負荷、204 トルク指令制御部、205 速度指令アンプ、206 トルク指令アンプ、301 マニピュレータ部、302 ハンド部、303 マニピュレータベース、304 第1のアクチュエータ、305 第2のアクチュエータ、306 第3のアクチュエータ、312 支持物体、401 リミットスイッチ、402 回転軸、403 ロボットアーム、404 負荷、405 ストッパ
Claims (2)
- ロボットアームの運動を制限するための機械的なストッパと、前記ストッパの前記ロボットアーム接触部に固定されて前記ロボットアームが接触したときに感応する感圧センサと、
前記ロボットアームのアクチュエータに供給するトルク指令を切断するトルク指令切断手段と、を備えたロボットにおいて、
前記感圧センサが前記ロボットアームの接触を感知したとき、
前記トルク指令切断手段が、前記トルク指令を切断するとともに、前記ストッパが前記ロボットアームに作用する負荷を支持することを特徴とするロボット。 - ロボットアームの運動を制限するための機械的なストッパと、前記ストッパに固定されて前記ロボットアームが接触したときに感応する感圧センサと、を備えたロボットにおいて、
前記感圧センサが前記ロボットアームの接触を感知したとき、
前記ロボットアームのアクチュエータに供給するトルク指令を切断し、
前記ストッパが前記ロボットアームに作用する負荷を支持することを特徴とするロボットの負荷支持方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP13731097A JP3841237B2 (ja) | 1997-05-27 | 1997-05-27 | ロボットおよびその負荷支持方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP13731097A JP3841237B2 (ja) | 1997-05-27 | 1997-05-27 | ロボットおよびその負荷支持方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPH10329081A JPH10329081A (ja) | 1998-12-15 |
| JP3841237B2 true JP3841237B2 (ja) | 2006-11-01 |
Family
ID=15195705
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP13731097A Expired - Fee Related JP3841237B2 (ja) | 1997-05-27 | 1997-05-27 | ロボットおよびその負荷支持方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3841237B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016130708A (ja) * | 2015-01-15 | 2016-07-21 | 株式会社ジェイテクト | 車両挙動再現システム |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6108551B2 (ja) * | 2013-10-28 | 2017-04-05 | 俊道 妻木 | 動作補助装置 |
| US10807248B2 (en) | 2014-01-31 | 2020-10-20 | Systems, Machines, Automation Components Corporation | Direct drive brushless motor for robotic finger |
| US9871435B2 (en) * | 2014-01-31 | 2018-01-16 | Systems, Machines, Automation Components Corporation | Direct drive motor for robotic finger |
| CN104941851B (zh) * | 2014-03-26 | 2018-07-20 | 安川(中国)机器人有限公司 | 清洗机器人系统及清洗方法和涂装机器人系统及涂装方法 |
| US12583105B2 (en) | 2021-10-29 | 2026-03-24 | Canon Kabushiki Kaisha | Robot, control method therefor, method for manufacturing article using robot, and storage medium |
| CN114347021B (zh) * | 2021-12-31 | 2024-01-12 | 中核武汉核电运行技术股份有限公司 | 一种基于多关节机械臂的安全控制系统和方法 |
-
1997
- 1997-05-27 JP JP13731097A patent/JP3841237B2/ja not_active Expired - Fee Related
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016130708A (ja) * | 2015-01-15 | 2016-07-21 | 株式会社ジェイテクト | 車両挙動再現システム |
Also Published As
| Publication number | Publication date |
|---|---|
| JPH10329081A (ja) | 1998-12-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3841237B2 (ja) | ロボットおよびその負荷支持方法 | |
| JPH08393B2 (ja) | 衝突防止機能付ロボットアーム | |
| WO2000060425A8 (en) | High precision positioning device and method of operating same | |
| EP1071097A4 (en) | DEVICE FOR POSITIONING A PLATE | |
| AU7923200A (en) | System for controlling movements of a load lifting device | |
| JP2021517520A (ja) | ロボット支援研削における回転数の制御 | |
| JP2004524693A5 (ja) | ||
| KR850002792A (ko) | 공작기계 | |
| JP2011060085A (ja) | 移動ロボット | |
| JP3138570B2 (ja) | 溶接機における電極ストロ―ク制御装置 | |
| JP2671570B2 (ja) | 宇宙機用構造体のドッキング用制動装置 | |
| JPH0727099Y2 (ja) | マスタ・スレーブマニプレータの制御装置 | |
| JP2567461Y2 (ja) | バランス装置 | |
| JPH0318132Y2 (ja) | ||
| JP3055474B2 (ja) | 振動ペンの取付機構 | |
| JPH0342966Y2 (ja) | ||
| JP2537793Y2 (ja) | フロントローダの降下速度制御装置 | |
| KR200318301Y1 (ko) | 초정밀부품 장착설비의 칩 마운트 헤드 | |
| JP2000061650A (ja) | 電動式溶接ガンの加圧制御方法 | |
| JPH01251729A (ja) | インナーリードボンディング装置及びインナーリードボンディング方法 | |
| KR100234663B1 (ko) | 산업용 로봇의 선회관절 작업영역규제장치 | |
| JP2647614B2 (ja) | 自動ガイド装置 | |
| JP2005314936A (ja) | 駆動装置 | |
| JPH09303513A (ja) | ボールねじ駆動制御装置 | |
| JPH0318418Y2 (ja) |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20040506 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20060209 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20060217 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060417 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20060721 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20060803 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090818 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100818 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110818 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120818 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130818 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140818 Year of fee payment: 8 |
|
| LAPS | Cancellation because of no payment of annual fees |