JP3733768B2 - 車載装置 - Google Patents
車載装置 Download PDFInfo
- Publication number
- JP3733768B2 JP3733768B2 JP01371699A JP1371699A JP3733768B2 JP 3733768 B2 JP3733768 B2 JP 3733768B2 JP 01371699 A JP01371699 A JP 01371699A JP 1371699 A JP1371699 A JP 1371699A JP 3733768 B2 JP3733768 B2 JP 3733768B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- standard deviation
- distance
- speed
- inter
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






Landscapes
- Length Measuring Devices With Unspecified Measuring Means (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Traffic Control Systems (AREA)
Description
【発明の属する技術分野】
本発明は、車間距離、自車速度等に基づいて先行車等の障害物への接近しすぎを検知して報知等の処理を行う車載機器に関する。
【0002】
【従来の技術】
従来例、特開平08−036696号公報には、自車速度、相対速度からドライバが車間距離を詰めて走行している状況である確信度を反映させて、車間距離、相対速度、自車速度等から演算した余裕時間、及びその時間変化速度等を判定材料として、接近しすぎであることを報知すると共に、
接近しすぎの度合いがより高くなれば自動的に回避動作を行うシステムが開示されている。
【0003】
【発明が解決しようとする課題】
そして、渋滞中に車間距離を詰めて走行する状況を想定し、自車速度が低速で相対速度がゼロ近傍であれば車間距離を詰めて走行している確信度を高くするとしている。しかしながら、同様に車間距離を詰めて走行する状況であっても、中高速で先行車に追従する場合には、相対速度がゼロ近傍であるとは限らない。つまり、車間距離を詰めて走行する状況であっても、車速が高ければ高いほど、車間距離が短くなったり長くなったりする。このような場合、相対速度はゼロ近傍から正負に大きく振れるため、ドライバが車間距離を意識的に詰めて運転しているかどうかを判別することはできない。その結果として、不適切なタイミングで警報や回避動作を行ってしまうおそれがある。
本発明は上記の点を考慮してなされたもので、渋滞時に限らず中高速で走行中に、ドライバが意識的に車間距離を詰めて走行している状況であっても、適切な報知や自動ブレーキ等の回避動作を行なわせることができることを目的としている。
【0004】
【課題を解決するための手段】
請求項1記載の発明では、自車と物体との距離を検出する距離検出手段と、自車と前記物体との相対速度を検出する相対速度検出手段と、自車速を検出する車速検出手段と、自車速と相対速度に基づいて所定の動作を実行するかどうかの基準値を決定する基準値決定手段と、前記基準値と前記物体までの距離とを比較し前記所定の動作を実行する実行手段と、少なくとも相対加速度の標準偏差と相対速度の標準偏差又は相対加速度の標準偏差と車間距離の標準偏差のいずれか一組の標準偏差を検出する標準偏差検出手段と、前記標準偏差に基づいて前記基準値を変更する変更手段と、を設けた。
【0005】
また、請求項2記載の発明では、前記変更手段において、所定の動作を抑制する方向に変更する手段を設けた。
【0006】
また、請求項3記載の発明では、前記所定の動作において、警報又は追突回避動作である手段を設けた。
【0007】
また、請求項4記載の発明では、自車加速度を検出し、自車加速度に基づいて前記基準値を変更する手段を設けた。
【0008】
また、請求項5記載の発明では、前記標準偏差検出手段は、車間距離と相対速度と相対加速度の全ての標準偏差を検出する手段を設けた。
【0009】
また、請求項6記載の発明では、前記変更手段が、前記標準偏差検出手段により検出された少なくとも相対加速度の標準偏差と相対速度の標準偏差又は相対加速度の標準偏差と車間距離の標準偏差のいずれか一組の標準偏差に基づいて、運転操作が意識的に行われているか否かを表す確信度を算出し、算出した確信度に基づいて前記基準値を変更するようにした。
【0010】
【発明の実施の形態】
以下、車両走行制御装置の実施の形態を説明する。
本発明の実施の形態は、先行車に追従して走行している際に、接近しすぎであることを報知する警報装置に適用した実施の形態である。
図1に示すように、先行車との車間距離を検出する車間距離検出部10と、自車の速度を検出する車速検出部1lを備えている。車間距離検出部10としてはレーザレンジファインダからなり、車間距離値Dを出力する。なお、ミリ波レンジファインダを使用したり、自車両前方の状況を撮像した画像中の先行車又は静止物の位置に基づいて車間距離を検出するようにしてもよい。
車速検出部11は車両に取り付けられている車速センサ及びセンサからの出力信号から車速を演算する演算部を有している二車間距離検出部10および車速検出部11は、演算処理装置12に接続されている。演算処理装置12は、車速検出部11からの車速V信号及び車間距離検出部10からの車間距離D信号を入力し、先行車と自車との相対速度RV及び自車加速度ACを演算する。さらに、相対速度の変化から相対加速度RACを演算する。そして、車間距離D、相対速度RV及び相対加速度RACに自車加速度ACを考慮して、警報装置13を動作させる基準値となる車間距離D1を演算する。
車間距離D1を演算する際に、後述するように、ドライバが車間距離を詰めて走行している状況にあることを判定し、その結果を考慮して距離D1を決定するようにしている。
【0011】
次に本発明の実施の形態の作用として、図2に基づいて演算処理装置12の作動を説明する。なお、車間距離検出部10,車速検出部11は一定時間間隔で車間距離D、自車速度Vの値を出力し、演算処理装置12は同じ一定時間間隔で車間距離D、自車速度Vの値を取り込んでいる。また以後、相対速度は自車と先行車が接近する方向を負とする。
まず、ステップ100では、上述したように、車間距離検出部10で検出された現在の車間距離D及び、車速検出部11で検出された現在の自車速度Vを取り込む。次のステップ101では現在の車間距離Dと過去(0.1秒程度)に取り込んだ車間距離Dの値から相対速度RVと、現在の自車速度Vと過去(0.1秒程度)に取り込んだ自車速度の値から自車加速度ACと相対速度RVの変化量から相対加速度RACを演算する。ステップ102では、ステップ100で取り込んだ時間から直前2秒程度の短時間の一定間隔における、車間距離の標準偏差DSD、相対速度の標準偏差RVSD、相対加速度の標準偏差RACSDを計算する。
ステップ103では、自車加速度ACの値により条件分岐して、ステップ104〜106のいずれかへ進む。ステップ104〜106のそれぞれのステップは、自車速度V、相対速度RVから、
警報装置を作動させる車間距離を参照するテープルのインデクスIDXnnを決定するステップである。
ステップ103での条件分岐は、自車速度、相対速度RVが同一でも自車加速度ACの値に応じて、算出する暫定の車間距離を示すインデクスIDXnnに変化を持たせるためである。図3(a)〜(c)に示すように、自車加速度ACの値によって、異なるマップを有し、それぞれの特性としては、図4(a)〜(c)に示すように、自車加速度ACが大きいほど、ドライバが先行車に接近する意図が強いとして、同じ自車速度V、相対速度RVであっても警報装置13を動作させる車間距離D1が短くなるようにしている。
図2では、自車加速度ACの値の分け方を3通りとした場合であるが、より細かく制御する場合には、分け方を増やしても良い。
【0012】
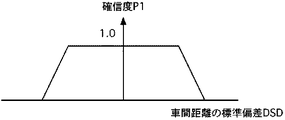
ステップ104〜106は、各々ステップ107〜109へ進む。ステップ107〜109では、車間距離の標準偏差DSD、相対速度の標準偏差RVSD、相対加速度の標準偏差RACSDの値から、ドライバが車間距離を詰めて先行車に追従している状況の確信度P0を決定する。車間距離の標準偏差DSDから図5に示すように車間距離が大きく変化したりばらついていない確信度P1を、相対速度の標準偏差RVSDから図6に示すように相対速度が大きく変化したりばらついていない確信度P2を、相対加速度の標準偏差RACSDから図7に示すように自車加速度が大きく変化したりばらついていない確信度P3を演算し、確信度P1,P2,P3の積によってドライバが車間距離を詰めて先行車に追従している状況の確信度P0が与えられる。
【0013】
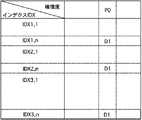
次にステップ110〜112では、インデクスIDXnnと確信度P0から、図8のようなテーブルを用いて警報装置を作動させる車間距離D1を決定する。確信度が高いほど車間距離D1の値を小さくするようにしている。つまり、警報を抑制するようにしている。
ステップ113では、測定した車間距離Dと、演算した警報装置を作動させる車間距離D1の大小を比較し、D1>Dであれば警報装置13を作動させる。
このように、車間距離が大きく変化したりばらついていない確信度P1、相対速度が大きく変化したりばらついていない確信度P2、相対加速度が大きく変化したりばらついていない確信度P3の積を考慮して車間距離D1を決定している為、車間距離が短くなったり長くなったりするような場合、つまり相対速度がゼロ近傍から正負に大きく振れたとしても、ドライバが車間距離を意識的に詰めて運転しているかどうかを判別することができ、その結果として、不必要に警報したり、回避動作を行うことがない。
上記実施の形態では、車間距離、相対速度及び相対加速度の3つの標準偏差を利用したが、少なくとも2つ利用すればよい。
【0014】
上記実施の形態では、本発明の特徴を警報装置に適用した例を説明したが、これに限るものではなく、実際に検出した距離と所定値とを比較し、実距離が所定値より小さくなったら自動ブレーキをかける装置やエンジンブレーキをかける装置、フットブレーキやエンジンブレーキのかける量を変化させる装置、ステアリングをきる装置等の追突回避装置等、実際に検出した距離と所定値とを比較して所定の動作を実行するものであれば、種々の装置に適用できる。
【0015】
【発明の効果】
以上説明したように、ドライバが先行車との車間距離を詰めて追従する意思を持って走行している場合に、車間距離が短くなったり長くなったりする状況であっても、所定の動作を実行するかどうかの基準値を、例えば、警報であれば、抑制する方向に変更するようにしたので、低速に限らず中速、高速域においても適切なタイミングで報知や回避動作等の所定の動作を実行することができる。
【図面の簡単な説明】
【図1】本発明の実施の形態の車載装置のシステム構成図である。
【図2】本発明の実施の形態の車載装置の処理動作を示すフローチャートである。
【図3】本発明の実施の形態の車載装置における、相対速度と自車速度のテーブル図である。
【図4】本発明の実施の形態の車載装置における、車間距離と相対速度の相関図である。
【図5】本発明の実施の形態の車載装置における、相対速度の標準偏差を示す図である。
【図6】本発明の実施の形態の車載装置における、相対速度の標準偏差を示す図である。
【図7】本発明の実施の形態の車載装置における、相対速度の標準偏差を示す図である。
【図8】本発明の実施の形態の車載装置における、確信度と車間距離のテーブル図である。
【符号の説明】
Claims (6)
- 自車と物体との距離を検出する距離検出手段と、
自車と前記物体との相対速度を検出する相対速度検出手段と、
自車速を検出する車速検出手段と、
自車速と相対速度に基づいて所定の動作を実行するかどうかの基準値を決定する基準値決定手段と、
前記基準値と前記物体までの距離とを比較し前記所定の動作を実行する実行手段と、
少なくとも相対加速度の標準偏差と相対速度の標準偏差又は相対加速度の標準偏差と車間距離の標準偏差のいずれか一組の標準偏差を検出する標準偏差検出手段と、
前記標準偏差に基づいて前記基準値を変更する変更手段と、
を有することを特徴とする車載装置。 - 前記変更手段は、所定の動作を抑制する方向に変更することを特徴とする請求項1に記載の車載装置。
- 前記所定の動作は、警報又は追突回避動作であることを特徴とする請求項1に記載の車載装置。
- さらに、自車加速度を検出し、自車加速度に基づいて前記基準値を変更することを特徴とする請求項1に記載の車載装置。
- 前記標準偏差検出手段は、車間距離と相対速度と相対加速度の全ての標準偏差を検出することを特徴とする請求項1に記載の車載装置。
- 前記変更手段は、前記標準偏差検出手段により検出された少なくとも相対加速度の標準偏差と相対速度の標準偏差又は相対加速度の標準偏差と車間距離の標準偏差のいずれか一組の標準偏差に基づいて、運転操作が意識的に行われているか否かを表す確信度を算出し、算出した確信度に基づいて前記基準値を変更するようにしたことを特徴とする請求項1に記載の車載装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP01371699A JP3733768B2 (ja) | 1999-01-22 | 1999-01-22 | 車載装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP01371699A JP3733768B2 (ja) | 1999-01-22 | 1999-01-22 | 車載装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2000215399A JP2000215399A (ja) | 2000-08-04 |
| JP3733768B2 true JP3733768B2 (ja) | 2006-01-11 |
Family
ID=11840979
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP01371699A Expired - Fee Related JP3733768B2 (ja) | 1999-01-22 | 1999-01-22 | 車載装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3733768B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2012140721A1 (ja) | 2011-04-11 | 2012-10-18 | トヨタ自動車株式会社 | 車両制御装置及び車両制御方法 |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4552911B2 (ja) * | 2006-08-10 | 2010-09-29 | 日産自動車株式会社 | 車両用運転操作補助装置およびその装置を備えた車両 |
| CN108860130B (zh) * | 2018-06-28 | 2020-03-24 | 中科安达(北京)科技有限公司 | 车辆制动系统复合控制的方法及系统 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3033354B2 (ja) * | 1992-08-26 | 2000-04-17 | 株式会社デンソー | 車間距離調整機能を備えた定速走行装置 |
| JPH06243397A (ja) * | 1993-02-18 | 1994-09-02 | Toyota Motor Corp | 車両追突防止装置 |
| JPH07123534A (ja) * | 1993-10-25 | 1995-05-12 | Hitachi Ltd | 車間距離制御方法 |
| JP3189560B2 (ja) * | 1994-03-25 | 2001-07-16 | 株式会社デンソー | 車間距離検知装置および車間距離警報装置 |
| JPH0880793A (ja) * | 1994-09-09 | 1996-03-26 | Toyota Autom Loom Works Ltd | 衝突警報システム |
-
1999
- 1999-01-22 JP JP01371699A patent/JP3733768B2/ja not_active Expired - Fee Related
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2012140721A1 (ja) | 2011-04-11 | 2012-10-18 | トヨタ自動車株式会社 | 車両制御装置及び車両制御方法 |
| US9483945B2 (en) | 2011-04-11 | 2016-11-01 | Toyota Jidosha Kabushiki Kaisha | Vehicle control device and vehicle control method |
| US9978277B2 (en) | 2011-04-11 | 2018-05-22 | Toyota Jidosha Kabushiki Kaisha | Vehicle control device and vehicle control method |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2000215399A (ja) | 2000-08-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4005597B2 (ja) | 車両における横ガイド支援方法及びその装置 | |
| JP3104463B2 (ja) | 車両用追突防止装置 | |
| WO2014203333A1 (ja) | 追い越し支援システム | |
| US20190092326A1 (en) | Vehicle control apparatus | |
| CN106470884B (zh) | 车辆状态的确定和在驾驶车辆时的驾驶员辅助 | |
| CN113453969A (zh) | 用于保护车辆的方法 | |
| WO2006129834A1 (ja) | 車両逸脱防止制御装置 | |
| JP2012226635A (ja) | 車両の衝突予防安全装置 | |
| US20190256085A1 (en) | Apparatus and method for setting speed of vehicle | |
| US20240308507A1 (en) | Method for driver assistance for motor vehicles | |
| US20200384992A1 (en) | Vehicle control apparatus, vehicle, operation method of vehicle control apparatus, and non-transitory computer-readable storage medium | |
| JP2017045367A (ja) | 車両制御装置および車両制御方法 | |
| JPH11321379A (ja) | 車両走行制御装置 | |
| JP6331233B2 (ja) | 車両制御装置 | |
| JP6447962B2 (ja) | 車両制御装置 | |
| US20200385023A1 (en) | Vehicle control apparatus, vehicle, operation method of vehicle control apparatus, and non-transitory computer-readable storage medium | |
| JP7614563B2 (ja) | 衝突回避装置、衝突回避方法及び衝突回避プログラム | |
| JP4876772B2 (ja) | 割込車両判定装置 | |
| WO2021044811A1 (ja) | 進行路推定装置 | |
| JP6311628B2 (ja) | 衝突回避制御装置 | |
| JP3223700B2 (ja) | 車両の障害物警報装置 | |
| JP2002248965A (ja) | 車輌用走行制御装置 | |
| US11260884B2 (en) | Vehicle control apparatus, vehicle, operation method of vehicle control apparatus, and non-transitory computer-readable storage medium | |
| JP3733768B2 (ja) | 車載装置 | |
| CN114514155A (zh) | 驾驶辅助方法以及驾驶辅助装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20050325 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20050419 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050617 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20050617 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20050927 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20051010 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20091028 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20091028 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101028 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111028 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121028 Year of fee payment: 7 |
|
| LAPS | Cancellation because of no payment of annual fees |