JP3669939B2 - アニメーション生成方式 - Google Patents
アニメーション生成方式 Download PDFInfo
- Publication number
- JP3669939B2 JP3669939B2 JP2001120661A JP2001120661A JP3669939B2 JP 3669939 B2 JP3669939 B2 JP 3669939B2 JP 2001120661 A JP2001120661 A JP 2001120661A JP 2001120661 A JP2001120661 A JP 2001120661A JP 3669939 B2 JP3669939 B2 JP 3669939B2
- Authority
- JP
- Japan
- Prior art keywords
- animation
- model
- data
- foot
- bone
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images









Description
【発明の属する技術分野】
本発明は、コンピュータ上で表現される、モデルのアニメーションを生成するアニメーション生成方式に関する。
【0002】
【従来の技術】
従来、コンピュータ上で表現されるモデルをリアルタイムにアニメーションさせる場合、予めモデルデータおよびモデルをアニメーションさせるスケルトンデータを、静的なデータとして用意しておく必要があった。
一般的には、モデル内にスケルトン階層を構築し、スケルトンを構築する各ボーンごとに、回転、移動値のアニメーションデータを用意し、そのデータを用いてアニメーションさせる。
しかし、この方法では、例えば各ボーンの長さが違うモデルの場合、適切なアニメーションを行うことができない。
【0003】
【発明が解決しようとする課題】
図8Aは、従来のアニメーションの動作を説明するための図で、モデルが正しく歩行している状態を示している。
モデルの足のボーン52は地面51に対し平行に移動している。
図8Bは、従来のアニメーションの動作を説明するための図で、図8Aの動きに対し、不自然な場合を示している。(a)はモデルが歩行するアニメーションの初期角度が異なる場合,(b)はモデルサイズが大きすぎる場合、(c)はモデルサイズが小さすぎる場合である。
【0004】
(a)ではモデルの歩行の初期角度が異なるため足のボーン54の軌跡55は地面53に対し交差する。(b)ではモデルサイズが大きすぎるため地面56より足のボーン57が下側位置になり、地面56に対し平行であるが、地面56の中を歩くような形になる。(c)ではモデルサイズが小さすぎるため地面59より足のボーン60が浮き上がり、地面59に対し平行であるが、空中を歩くような形となる。
従来のアニメーションではこのように足を構成するボーンの長さが違えば、地面を踏みしめる歩きの表現で不可欠な要素は完全に欠落してしまう。また、構成するボーンの一本でも角度が違えば、元の表現したい動きとは程遠いものになってしまう。
【0005】
したがって従来のアニメーション作成では、例えばコンピュータゲーム上で、ユーザがモデルを作成し動的に生成されたモデル(スケルトン)を動かすというようなことは不可能である。
本発明は上記問題を解決するもので、その目的は、モデルをアニメーションさせるためのスケルトンを、その動作の目的別に管理し、少ないアニメーションデータから、形状の異なるスケルトンを自然にアニメーションさせることができるアニメーション生成方式を提供することにある。
【0006】
【課題を解決するための手段】
前記目的を達成するために本発明によるアニメーション生成方式は、ジオメトリ処理部および描画処理部を有し、ユーザが入力するモデル形状などのデータに基づきスケルトンデータを作成してアニメーションのモデルを完成させるゲーム機におけるアニメーション生成方式において、入力されるデータに基づき部品単位でモデルを構築するモデル作成手段と、前記モデル作成手段で作成した部品が何であるかの情報を入力する入力手段と、前記モデル作成手段で作成したモデルに対し、入力された情報から手,足,胴体等の種類毎に適切なスケルトンデータを構築するスケルトンデータ作成手段と、前記スケルトンデータ作成手段で作成した各ボーンを動きの目的ごとに分類、管理する分類管理手段と、各ボーンのパーツに元のアニメーションデータを加工して貼り合わせるアニメーションデータ加工手段と、前記加工したアニメーションデータから、各分類ごとに決められた法則にしたがってボーン計算を行い、アニメーションを実行するアニメーション実行手段とを備え、前記アニメーションデータ加工手段では、キャラクタが移動する際の基準となる重心を、すべての足の付け根位置の平均位置に設定し、元のモデルデータと作成されたモデルとの手足の長さの比であるスケール値を求め、足の場合、足の付け根からの垂線と高さ0の平面の交点を求め、その交点の原点からの位置ベクトルを求め、腕の場合は、足の場合と同じ方法によって時間毎に位置ベクトルを求めることにより、前記スケール値で求めたアニメーションデータのスケーリングを行い、前記位置ベクトルでオフセットを行い、前記アニメーション実行手段では、インバースキネマティックで手足について根元から先端部の各関節の回転値を計算し、手足のボーンを、移動,回転するように構成されている。
【0007】
【作用】
前記構成によれば、ユーザが作るモデルからスケルトンを自動生成し、多少のモデル構造に差異があっても自然なアニメーション動作をさせることができる。
【0008】
【発明の実施の形態】
以下、図面を参照して本発明をさらに詳しく説明する。
図1は、本発明によるアニメーション生成方式を適用したゲーム装置の回路の実施の形態を示すブロック図である。この例はゲーム装置を示すもので、本発明に直接関係する回路のみを記載してある。
操作部7を操作することによりゲーム処理部2がゲーム全体の制御を行い、ゲームを進行させることができる。ゲーム開始により画像がディスプレイ11に表示されるとともにバックグランド音がサウンド処理部8を介してスピーカ9より出力される。
記憶部10はグラフィックメモリ10a,オーディオメモリ10bを有している。この他に所定メモリ領域にゲームプログラム,ジオメトリプログラム,描画プログラムなどを格納している。
【0009】
画像処理部3はジオメトリ処理部4および描画処理部5の機能を有している。ジオメトリ処理部4は、ポリゴンの3次元座標データを高速に処理する制御部で、ゲーム処理部から送られてくるポリゴンの座標データにモデルの移動,回転等に対する処理を行い、クリッピング,視野変換等の処理を行う。
描画処理部5は、ポリゴンモデルのレンダリングを高速に処理する制御部で、ポリゴンデータに対してレンダリング処理を行い、陰面処理およびシェーディング処理等を行う。レンダリング部5で処理されたモデルのデータは、1画面毎にグラフィックメモリ10aに格納され、このデータは図示しないD/Aコンバータで映像信号に変換され、ディスプレイ11に表示される。
ゲーム処理部2,ジオメトリ処理部4および描画処理部5の各機能は、記憶部10に格納されているゲームプログラム,ジオメトリプログラム,描画プログラムを図示しないCPUで処理することにより実現される。
【0010】
描画処理部5は、モデル作成部5a,スケルトンデータ作成部5b,分類管理部5c,アニメーションデータ加工部5dおよびアニメーション実行部5eの機能を有している。
モデル作成部5aは、操作部7より入力される形状データに基づき部品単位(手,足,胴体,頭など)でモデルを構築する。操作部7は手書き入力可能なアナログスティックを含み、該アナログスティックでモデルの形状を入力可能であり、また、ボタンやカーソル操作により作成した部品が何であるかの情報を入力することができる。スケルトンデータ作成部5bは、モデル作成部で作成された部品のモデルが入力情報から何であるかを知り、例えば足であれば、足の情報から足ボーンのスケルトンデータを構築する。
【0011】
分類管理部5cは、スケルトンデータ作成部5bで作成した各ボーンを、動きの目的ごとに分類して管理する。アニメーションデータ加工部5dは、各ボーンのパーツに元のアニメーションデータを加工して貼り合わせる制御を行う。アニメーション実行部5eは、加工したアニメーションデータから、各分類(手,足,胴など)ごとに決められた法則にしたがってボーン計算を行い、アニメーションを実行する。
【0012】
図2は腕,足のスケルトンを構築する実施の形態を示す図である。
スケルトンデータ作成部5bは以下に示すような修正を行って足,腕のスケルトンデータを作成する。
図2(a)において、腕,足の根元に近いノードから各関節をABCおよびDとする。各関節は足であれば、Aは付け根14,Bは膝15,Cは接地部16,Dはつま先17に対応する。
【0013】
腕、足のアニメーションは、ABCをインバースキネマティックスを用いてコントロールすることで実現する。
AB,BC,CDの長さをそれぞれL1,L2,L3としたとき、インバースキネマティックスの性質上、L1,L2の長さのバランスが好ましくない場合は思ったような動きをさせることができない。
これは、L1,L2の差が大きい場合、Cの到達可能範囲が挟まるため、アニメーションの再現率が悪くなるからである。よって、ユーザが入力した形の特徴を残しつつ、インバースキネマティックスを計算する上で都合の良いようにノード位置をコントロールする必要がある。
【0014】
スケルトンの理想的な形とは以下のようなものである。
(1)L1とL2の差が少ないこと。
この場合、Cの到達範囲が最大になる。
(2)L3が十分に小さいこと。
L3が大きい場合、足の動きのメインとなるCの動きよりもDの動きが大きくなってしまうため、好ましくない。
(3)ユーザの入力データの特徴が尊重されていること。
【0015】
図2(b)(c)(d)(e)および(f)に示すようなバランスの悪いボーン形状である場合、上記の条件を満たすように以下のような修正を加える。
図2(b)はL3が、L1+L2より大きい場合である。この場合はBをCの位置へ移動させる。そしてCは、BとDの間に移動させ、AB=BCを満たす位置に配置する。
図2(c)はL1が、L2+L3より大きい場合である。この場合はCをBの位置へ移動させる。そしてDをCの位置に移動させ、BはAとCの中間に移動させる。
図2(d)はABCがほぼ一直線上に存在する場合である。この場合はBをAとCの中間に配置する。
図2(e)は、BCDがほぼ一直線上に存在する場合である。CをDの近くまで移動させる。そしてBをAとCの中間に配置する。
図2(f)は、ABCDがほぼ一直線上に存在する場合である。CをDの近くまで移動させる。そしてBをAとCの中間に配置する。
【0016】
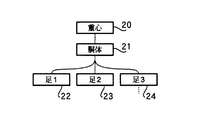
図3は、重心のアニメーション方法を説明するための図である。
動的に作られたモデルの重心は以下のように決定する。
重心を決定するのに必要な要素は、胴体と足である。そして重心の位置(腰の部分)は、すべての足の付け根位置の平均の位置に設定する。階層構造は図3に示すようになる。重心20と胴体21があり、その下に足22,足23,足23aが存在する。多数の足を記載したのは、足の長さの平均をとるためである。アニメーションデータ加工部5dは重心アニメーションの加工を以下のように行う。
重心のアニメーションは、回転、移動のデータを用いる。回転はそのまま利用できるが、移動値は、スケーリングが必要となる。動的に作られたモデルのすべての足の長さの平均を、仮のモデルデータのすべての足の長さの平均で割ったものがスケール値になる。アニメーション実行部5eは、このスケーリングされた値を用いて重心の移動値をアニメーションさせる。
【0017】
図4は、胴体のアニメーション方法を説明するための図である。
一般的に胴体のアニメーションは全体の骨の動きの方向が重要視される。また、一般的なスケルトンの回転は各ボーンのローカル座標系で行われる。静的なモデルを動かす場合は、ローカル座標は事前に決定されるため、それを考慮してアニメーションデータを作成できる。しかし、動的にスケルトンを生成させる場合は、ローカル座標がどのような方向になるか予測できない。したがって、全体の骨の動きの方向を重視するため、本システムの胴体アニメーションはモデル空間座標軸で回転させるようにしている。。
【0018】
図4(a)(c)および(e)において、3つのボーン部25,26および27で背骨が構成され、アニメーションデータでそれぞれのボーン部に回転,移動を与えることにより背骨を構成する各ボーン部25,26および27は(a)では28の位置に、(b)では29の位置に、(c)では30の位置にそれぞれ変化している状態を示している。
同じボーンの構成ならば、図4(b)の背骨の動きは(a)と同じ回転方向となり通常のローカル座標系の回転でよい。しかし、ローカル座標系の異なるボーンを同じアニメーションで回転させると、図4(c)の背骨の動きは(d)に示すようになり、胴体アニメーションで重要な全体の動きの方向が反対方向に変わってしまう。そこで本発明ではモデル空間座標軸で回転させることにより、図4(e)の背骨とは異なる形状の図4(f)のボーンであっても、全体の動きの方向を一致させることができる。
【0019】
図5は、手足のアニメーション方法を説明するための図である。
ユーザの作成するモデルは動的に生成されるため、腕、足は長さ、付け根の位置等が特定できない。よって、それらに依存しないアニメーションシステムが必要となる。
下記の処理はアニメーションデータ加工部5dまたはアニメーション実行部5eが行う。
(1)アニメーションスケール値を求める
図5(a)で示すような各手足のボーン36,31の長さを求め、アニメーションスケール値とする。これは、根元から先端までの、各ボーンの長さの合計である。求めた足の長さを、対応する元データの足の長さで割ったものがスケール値になる。
【0020】
(2)アニメーションオフセット値を求める
足の場合は、図5(b)の左側に示すように足32の付け根からの垂線33と、高さ0の平面34との交点を求め、その交点の原点35からの位置ベクトルがオフセット値となる。ただし、腕の場合(図5(b)の右側)は、腕の付け根位置はリアルタイムに変化するので、オフセット値は時間ごとに再計算する必要がある。
(3)アニメーションデータのスケーリング
アニメーション時には、まず、アニメーションデータから現在時間の値を求め(この値は原点からの位置ベクトル)、(1)で求めたスケール値で、スケーリングする。図5(c)の37はアニメーションデータを模型化したものであり、図5(c)の左下側および右下側に示すボーン38,39はスケール値でスケーリングした状態であり、右下側のアニメーションデータは左下側のそれより小さくなっている。
【0021】
(4)オフセットする
(2)で求めたオフセット値で、アニメーションデータをオフセットする。図5(d)の左側と右側に示すボーン40,41はそれぞれの方向にオフセット、すなわち平行移動し、アニメーションデータを統一する。
(5)インバースキネマティック
求めた位置に、手足の先端部の位置を一致させる。一致させるにはインバースキネマティックで、根元から先端部の各関節の回転値を計算する。図5(e)のボーン42の先端42aは移動,回転させられて位置43に一致する。
【0022】
図6は、本発明によるアニメーション生成の具体例を示す図、図7Aおよび図7Bは、図6で作成したアニメーションの動作を説明するための図である。
ユーザの形状入力により図6▲1▼〜▲5▼)に示すように胴体,左足,右足,左手,右手が加えられてアニメーションのモデルが完成する。そして、図7Aおよび図7B▲1▼〜▲8▼)に示すようにアニメーション画像は自然な状態でアニメ動作を行うことができる。
【0023】
【発明の効果】
以上、説明したように本発明は入力されるデータに基づき部品単位でモデルを構築するモデル作成手段と、モデル作成手段で作成した部品が何であるかの情報を入力する入力手段と、モデル作成手段で作成したモデルに対し、入力された情報から手,足,胴体等の種類毎に適切なスケルトンデータを構築するスケルトンデータ作成手段と、スケルトンデータ作成手段で作成した各ボーンを動きの目的ごとに分類、管理する分類管理手段と、各ボーンのパーツに元のアニメーションデータを加工して貼り合わせるアニメーションデータ加工手段と、加工したアニメーションデータから、各分類ごとに決められた法則にしたがってボーン計算を行い、アニメーションを実行するアニメーション実行手段とを備え、アニメーションデータ加工手段では、キャラクタが移動する際の基準となる重心を、すべての足の付け根位置の平均位置に設定し、元のモデルデータと作成されたモデルとの手足の長さの比であるスケール値を求め、足の場合、足の付け根からの垂線と高さ0の平面の交点を求め、その交点の原点からの位置ベクトルを求め、腕の場合は、足の場合と同じ方法によって時間毎に位置ベクトルを求めることにより、スケール値で求めたアニメーションデータのスケーリングを行い、前記位置ベクトルでオフセットを行い、アニメーション実行手段では、インバースキネマティックで手足について根元から先端部の各関節の回転値を計算し、手足のボーンを、移動,回転するように構成したものである。
したがって、スケルトンの長さ、角度、位置に依存せず、かつ一様のアニメーションを行うことができる。
実際アニメーションデータを作成する際には、モデルの差異はこのシステムで吸収するため、最小限のアニメーションデータで、より多くの種類のモデルをアニメーションさせることができるという効果がある。
【図面の簡単な説明】
【図1】本発明によるアニメーション生成方式を適用した装置の回路の実施の形態を示すブロック図である。
【図2】腕,足のスケルトンを構築する実施の形態を示す図である。
【図3】重心のアニメーション方法を説明するための図である。
【図4】胴体のアニメーション方法を説明するための図である。
【図5】手足のアニメーション方法を説明するための図である。
【図6】アニメーション構築の具体例を示す図である。
【図7A】図6で作成したアニメーションの動作を説明するための図で、前半部分を示している。
【図7B】図6で作成したアニメーションの動作を説明するための図で、後半部分を示している。
【図8A】従来のアニメーションの動作を説明するための図で、あるモデルが正しく歩行している状態を示している。
【図8B】従来のアニメーションの動作を説明するための図で、(a)はあるモデルが歩行するアニメーションであって、初期角度が異なる場合,(b)はモデルサイズが大きすぎる場合、(c)はモデルサイズが小さすぎる場合をそれぞれ示している。
【符号の説明】
1 処理部
2 ゲーム処理部
3 画像処理部
4 ジオメトリ処理部
5 描画処理部(レンダリング部)
6 バス
7 操作部
8 サウンド処理部
9 スピーカ
10 記憶部
11 ディスプレイ
14 付け根(関節)
15 膝(関節)
16 接地部
17 つま先
18 足のボーン
Claims (1)
- ジオメトリ処理部および描画処理部を有し、ユーザが入力するモデル形状などのデータに基づきスケルトンデータを作成してアニメーションのモデルを完成させるゲーム機におけるアニメーション生成方式において、
入力されるデータに基づき部品単位でモデルを構築するモデル作成手段と、
前記モデル作成手段で作成した部品が何であるかの情報を入力する入力手段と、
前記モデル作成手段で作成したモデルに対し、入力された情報から手,足,胴体等の種類毎に適切なスケルトンデータを構築するスケルトンデータ作成手段と、
前記スケルトンデータ作成手段で作成した各ボーンを動きの目的ごとに分類、管理する分類管理手段と、
各ボーンのパーツに元のアニメーションデータを加工して貼り合わせるアニメーションデータ加工手段と、
前記加工したアニメーションデータから、各分類ごとに決められた法則にしたがってボーン計算を行い、アニメーションを実行するアニメーション実行手段とを備え、
前記アニメーションデータ加工手段では、キャラクタが移動する際の基準となる重心を、すべての足の付け根位置の平均位置に設定し、
元のモデルデータと作成されたモデルとの手足の長さの比であるスケール値を求め、
足の場合、足の付け根からの垂線と高さ0の平面の交点を求め、その交点の原点からの位置ベクトルを求め、腕の場合は、足の場合と同じ方法によって時間毎に位置ベクトルを求めることにより、
前記スケール値で求めたアニメーションデータのスケーリングを行い、前記位置ベクトルでオフセットを行い、
前記アニメーション実行手段では、インバースキネマティックで手足について根元から先端部の各関節の回転値を計算し、手足のボーンを、移動,回転するように構成したことを特徴とするアニメーション生成方式。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001120661A JP3669939B2 (ja) | 2001-04-19 | 2001-04-19 | アニメーション生成方式 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001120661A JP3669939B2 (ja) | 2001-04-19 | 2001-04-19 | アニメーション生成方式 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2002319035A JP2002319035A (ja) | 2002-10-31 |
| JP3669939B2 true JP3669939B2 (ja) | 2005-07-13 |
Family
ID=18970659
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2001120661A Expired - Lifetime JP3669939B2 (ja) | 2001-04-19 | 2001-04-19 | アニメーション生成方式 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3669939B2 (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006122241A (ja) | 2004-10-27 | 2006-05-18 | Nintendo Co Ltd | ゲーム装置およびゲームプログラム |
| JP4692175B2 (ja) * | 2005-09-14 | 2011-06-01 | パナソニック電工株式会社 | デジタルヒューマンシステム |
| JP5149547B2 (ja) | 2007-06-07 | 2013-02-20 | 株式会社コナミデジタルエンタテインメント | ゲーム装置、ゲーム装置の制御方法及びプログラム |
| JP5210401B2 (ja) * | 2011-01-17 | 2013-06-12 | 株式会社スクウェア・エニックス | 用例に基づく効率的なモーションデータベースのスタイリング |
| CN110507986B (zh) * | 2019-08-30 | 2023-08-22 | 网易(杭州)网络有限公司 | 动画信息的处理方法和装置 |
| JP7370198B2 (ja) | 2019-09-10 | 2023-10-27 | 株式会社バンダイナムコエンターテインメント | 処理システム、情報処理装置、プログラム及び処理方法 |
-
2001
- 2001-04-19 JP JP2001120661A patent/JP3669939B2/ja not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| JP2002319035A (ja) | 2002-10-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3579148B2 (ja) | 多関節体の動きを生成するように複数の動きユニットを操作する方法及びそのシステム | |
| JP4664402B2 (ja) | 適応的サンプル距離フィールド生成方法及びその装置 | |
| JP4810561B2 (ja) | グラフィクスモデル変換装置及びグラフィクスモデル変換装置としてコンピュータを機能させるグラフィクスモデル処理プログラム | |
| Igarashi et al. | Clothing manipulation | |
| Kalra et al. | Real-time animation of realistic virtual humans | |
| US8498849B1 (en) | Wrinkle simulation on fabric based on three arm joint angles | |
| JP4220714B2 (ja) | コンピュータ実現ツールを用いてグラフィクスオブジェクトを編集するコンピュータで実現される方法 | |
| JP2001209824A (ja) | ビデオゲームにおける三次元オブジェクト変形方法及びビデオゲーム装置、並びにビデオゲーム用のプログラムを記録したコンピュータ読み取り可能な記録媒体 | |
| WO2005114640A1 (en) | Patch picking methods and apparatus | |
| JP4739430B2 (ja) | 3次元デザイン支援装置及びプログラム | |
| JP4140688B2 (ja) | コンピュータ実現ツールを用いてグラフィクスオブジェクトのサーフェスを編集するコンピュータで実現される方法 | |
| JP4719155B2 (ja) | リグ・ベーキング | |
| WO2008116426A1 (fr) | Procédé de commande d'animation de rôle et système apparenté | |
| JP3669939B2 (ja) | アニメーション生成方式 | |
| Boulic et al. | Versatile walk engine. | |
| US7012608B1 (en) | Simulation device | |
| JP3212255B2 (ja) | 画像合成装置及び画像合成方法 | |
| JP4815521B2 (ja) | 画像処理装置、画像処理方法、ならびに、プログラム | |
| US8289331B1 (en) | Asymmetric animation links | |
| JP4579964B2 (ja) | 画像生成装置、画像生成方法、ならびに、プログラム | |
| JP2007048151A (ja) | 3次元曲面への物体メッシュモデルの写像方法 | |
| US9128516B1 (en) | Computer-generated imagery using hierarchical models and rigging | |
| JP4358752B2 (ja) | 統計力学的衝突の方法と装置 | |
| CN108198234B (zh) | 可实时互动的虚拟角色生成系统及方法 | |
| US20230377268A1 (en) | Method and apparatus for multiple dimension image creation |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20041228 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050224 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20050412 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20050412 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 3669939 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R371 | Transfer withdrawn |
Free format text: JAPANESE INTERMEDIATE CODE: R371 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100422 Year of fee payment: 5 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100422 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110422 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120422 Year of fee payment: 7 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120422 Year of fee payment: 7 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130422 Year of fee payment: 8 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130422 Year of fee payment: 8 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140422 Year of fee payment: 9 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140422 Year of fee payment: 9 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140422 Year of fee payment: 9 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| EXPY | Cancellation because of completion of term |