JP3606214B2 - チップの圧着方法 - Google Patents
チップの圧着方法 Download PDFInfo
- Publication number
- JP3606214B2 JP3606214B2 JP2001066373A JP2001066373A JP3606214B2 JP 3606214 B2 JP3606214 B2 JP 3606214B2 JP 2001066373 A JP2001066373 A JP 2001066373A JP 2001066373 A JP2001066373 A JP 2001066373A JP 3606214 B2 JP3606214 B2 JP 3606214B2
- Authority
- JP
- Japan
- Prior art keywords
- chip
- crimping
- load
- substrate
- level
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images



Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L24/00—Arrangements for connecting or disconnecting semiconductor or solid-state bodies; Methods or apparatus related thereto
- H01L24/74—Apparatus for manufacturing arrangements for connecting or disconnecting semiconductor or solid-state bodies
- H01L24/75—Apparatus for connecting with bump connectors or layer connectors
Landscapes
- Engineering & Computer Science (AREA)
- Manufacturing & Machinery (AREA)
- Computer Hardware Design (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Power Engineering (AREA)
- Wire Bonding (AREA)
Description
【発明の属する技術分野】
本発明は、チップを基板上に圧着によって実装するためのチップの圧着方法に関するものである。
【0002】
【従来の技術】
フリップチップなどのバンプ付きのチップを基板に実装する方式として、バンプを基板の表面に形成された回路パターンの電極に押しつけて接合する方法がある。この方法では各バンプに加えられる荷重値および各バンプ毎の荷重分布を厳密に管理する必要があり、従来、チップの圧着に際しては圧着荷重値を計測し目標荷重値と比較しながら荷重を加えて行く方法が知られている。この荷重測定用としてロードセルなどの荷重計測手段が用いられ、チップ圧着装置の圧着荷重を伝達する機構に組み込まれている。
【0003】
【発明が解決しようとする課題】
しかしながら従来の方法では、荷重計測手段は荷重伝達機構中に直列に配置され、荷重計測手段を介して押圧される圧着ツールをスプリング等で保持する方法が採られていたため、微少な荷重を正確に測定することが困難であるという問題点があった。
【0004】
そこで本発明は、圧着荷重を正確に計測しながら圧着ができるチップの圧着方法を提供することを目的とする。
【0005】
【課題を解決するための手段】
本発明のチップの圧着方法は、チップを保持するチップ保持手段を下降させてチップを基板に圧着するチップの圧着方法であって、前記チップを待機レベルから基板の実装面の上方の1次停止レベルまで高速度で下降させて一旦停止させ、前記1次停止レベルにおいてカメラの鏡筒が前記チップと前記基板の間に前進して前記カメラにより前記チップとの前記基板の位置認識を行い、次いで前記チップを前記1次停止レベルから基板の実装面の上方の2次停止レベルまで再び高速度で下降させ、次いで前記高速度よりも低速でチップを下降させて前記実装面に当接させ、次いで荷重計測手段によりチップを基板に圧着する荷重を計測しながらチップを小刻みに下降させ、計測荷重値が目標値に到達したならば下降を停止させるようにした。
【0006】
【発明の実施の形態】
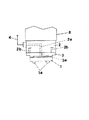
以下、本発明の一実施の形態を図面を参照して説明する。図1は本発明の一実施の形態のチップの圧着装置の側面図、図2は本発明の一実施の形態のチップの圧着装置のチップの吸着部の部分側面図、図3は本発明の一実施の形態のチップの圧着装置の動作タイムチャート、図4は本発明の一実施の形態のチップの圧着装置の動作タイムチャートの部分拡大図である。
【0007】
まずチップの圧着装置の構造を説明する。図1において、チップ1は吸着部2の下部に設けられた圧着ツール3の下面に真空吸着して保持される。チップ1はその下面にバンプ1a(図2参照)を有し、このバンプ1aが基板の回路面の電極に圧着される。
【0008】
図2はチップ保持手段であるチップの吸着部2と圧着ツール3の構造を示している。図2において、圧着ツール3は薄いプレート状の部品でチップ1の上面に密着してチップ1を真空吸着する。吸着部2の中央には第1の吸着路2aが設けられている。この第1の吸着路2aは圧着ツール3に設けられた吸着口3aに連通している。したがってこの吸着路2aを吸引することによりチップ1は圧着ツール3の下面に真空吸着される。
【0009】
また吸着部2には第2の吸着路2bが設けられている。この吸着路2bを真空吸引することにより、圧着ツール3は吸着部2の下面に着脱自在に真空吸着され、またこの真空吸引を解除することにより、圧着ツール3は吸着部2から取りはずされる。図1に示すように吸着路2aには真空配管4が接続され、真空配管4はオンオフ弁5を介して真空源6に接続されている。
【0010】
図1において、吸着部2の直上にはヒートブロック7が設けられている。ヒートブロック7は制御部60により電気的に制御され、吸着部2と圧着ツール3を介してチップ1を加熱する。ヒートブロック7はシャフト8に取り付けられ、更にシャフト8は第1の昇降ブロック10に装着されている。
【0011】
第1の昇降ブロック10の背面にはスライダ11が設けられており、スライダ11は第1のフレーム12の前面に設けられた垂直なガイドレール11aにスライド自在に嵌合している。したがって第1の昇降ブロック10はガイドレール11aに沿って昇降する。また第1の昇降ブロック10の上部には逆L形状の第1の張り出し部13が設けられ、後に説明するようにこの第1の張り出し部13の下面14が後述の荷重計測手段としての荷重センサー33と接触し荷重を伝えるようになっている。
【0012】
第1の昇降ブロック10の上方には第2の昇降ブロック20が設けられている。第2の昇降ブロック20の背面にはスライダ21が設けられており、スライダ21は第2のフレームの22の前面に設けられた垂直なガイドレール21aにスライド自在に嵌合している。したがって第2の昇降ブロック20はガイドレール21aに沿って昇降する。
【0013】
第2のフレーム22の上部には断面コの字型のブラケット26が装着されている。ブラケット26上にはモータ25が配設されている。モータ25に駆動される垂直な送りネジ24は第2の昇降ブロック20に内蔵されたナット23に挿入されている。したがってモータ25が正逆回転すると、送りネジ24は正逆回転してナット23は送りネジ24に沿って上下動し、第2の昇降ブロック20及び第1の昇降ブロック10は昇降する。すなわち第1の昇降ブロック10、第2の昇降ブロック20、モータ25、送りネジ24、ナット23などはチップ1を押し下げる下降手段を構成する。
【0014】
モータ25には、モータ駆動部29が接続されている。モータ駆動部29は制御部60からの指令を受けモータ25の回転速度を制御するとともに、エンコーダ28の発するモータ25の回転数信号を制御部60へ伝達する。
【0015】
次に圧着ツール3を介してチップ1に押圧力を与える荷重付与手段及び荷重計測手段について説明する。荷重付与手段であるシリンダ30は第2の昇降ブロック20の下面に装着されている。シリンダ30のロッド30aの下端部は第1の張り出し部13に結合されており、したがってこのシリンダ30はロッド30aが突出することにより所定の押圧力を第1の昇降ブロック10の第1の張り出し部13の上面15に加える。シリンダ30にはレギュレータ32が接続されており、エア供給源31のエア圧力を調節することで所定の押圧力に設定できる。また荷重計測手段はロードセルなどの荷重センサ33であり、第2の昇降ブロック20の下部の第2の張り出し部35上に配設されている。第1の張り出し部13は第2の張り出し部35の上方に位置しており、荷重センサ33は第1の張り出し部13と第2の張り出し部35の間に設けられている。
【0016】
荷重センサ33の荷重検出端34は第1の昇降ブロック10の張り出し部13の下面14に接触し、この張り出し部13の下面14を介して計測荷重を受け、荷重を計測するように配置されている。このような配置とすることにより、荷重センサ33にはシリンダ30の押しつけ力と吸着部2やシャフト8などを含めた第1昇降ブロック10の自重との和が予圧として作用する。チップ1の圧着時には実装面から反力を受けた分だけ荷重センサ33の計測値が減少することになり、結局この減少分が圧着力に相当するから、この荷重センサ33の減少値を監視しながら圧着を行えばよいことになる。
【0017】
圧着ツール3の下方には可動テーブル42が設けられている。可動テーブル42上には基板ホルダ41が設けられており、基板40は基板ホルダ41上に設けられている。可動テーブル42は可動テーブル駆動部43を介して制御部60に接続されている。可動テーブル42が駆動することにより基板40はX方向、Y方向、θ方向に水平移動しその位置調整がなされる。
【0018】
次にこのチップの圧着装置へのチップ1の供給手段について説明する。図1において第1のフレーム12の下方にはチップ1の供給テーブル70が備えられている。この供給テーブル70は図示しない駆動手段に駆動されて前進後退し、図1の鎖線位置にて圧着ツール3へチップ1の受け渡しを行う。
【0019】
第1のフレーム12の下方にはカメラ51が設けられている。このカメラ51はCCDカメラである。カメラ51は前方へ突出する鏡筒52を備えている。鏡筒52の先端部の上面と下面にはレンズ53及びレンズ54が設けられている。鏡筒52は駆動手段(図示せず)に駆動されて前進後退自在となっており、圧着ツール3に真空吸着されたチップ1と基板40の間に前進し(鎖線で示す鏡筒52を参照)、レンズ53を通してチップ1の位置認識を行い、レンズ54を通して基板40の位置認識を行う。
【0020】
カメラ51には画像認識部50が接続されており、画像認識部50は制御部60に接続されている。カメラ51に取り込まれた画像データは画像認識部50に送られる。画像認識部50は画像データを認識し、必要なデータを制御部60へ送る。
【0021】
次に制御部60について説明する。制御部60は昇降モータ駆動部29からモータ25の回転数信号、荷重センサ33からの計測値および画像認識部50から基板40の位置データおよびチップ1の位置データを入手し、制御シーケンスにしたがって昇降モータ25の駆動、チップ吸着用バルブ5のオンオフ、ヒートブロック7の加熱電流の制御などの制御を行う。さらに圧着初期の計測データに基づき、剛性値(後述)の計算を行う剛性値演算手段61を備えている。
【0022】
このチップの圧着装置は上記のような構成より成り、以下その動作を各図を参照して説明する。図1においてチップ1は第1のフレーム12の下方に位置する供給テーブル70により供給される。次に待機レベル(イ)にあった圧着ツール3が下降し、チップ1を真空吸着する。次いで圧着ツール3はチップ1を吸着して待機レベル(イ)へ上昇し、チップ1を渡して空になった供給テーブル70は図1において示す実線の位置へ復帰する。この状態では、前述のように荷重センサ33にはシリンダ30の押圧力Aとチップ吸着部2やノズル8などを含んだ第1の昇降ブロック10の自重Bの和が予圧F0=A+Bとして負荷されている。
【0023】
以下、図1および図3のタイムチャートによりチップの圧着装置の動作を説明する。図3のタイムチャートでは、横軸は時間を、縦軸は圧着ツール3に保持されたチップ1のバンプ1aの高さを表す。実線aは圧着ツール3が昇降駆動されることによるチップ1の動きを表したものである。ただし圧着完了後の上昇時にはチップ1は圧着ツール3の先端には存在しない。また実線bは同時に計測されている荷重センサ33の計測値を表す。(イ)は待機レベル、(ロ)は1次停止レベル、(ハ)はチップ1が実装面(基板40の上面)に当接する手前の2次停止レベル、(ニ)は実装面のレベル、(ホ)は第1の目標下降レベル、(ヘ)は最終の目標下降レベルを表す。この最終の目標下降レベル(へ)は、目標圧着荷重値に対応する下降レベルである。
【0024】
図3のタイミングt0において、チップ1を吸着した圧着ツール3は待機レベル(イ)にある。圧着動作開始の指令を受けると圧着ツール3は高速で下降を開始しタイミングt1において1次停止レベル(ロ)で一旦停止する。この停止時間T1中に鏡筒52が前進し、そのレンズ53、54がチップ1の直下に位置すると撮像が開始され、チップ1のバンプ1a面および下にある基板40の実装面の画像データを取り込む。この画像データは画像認識部50に送られ、画像認識部50はこの画像データに基づきチップ1と基板40の位置認識を行いその結果を制御部60に伝達する。制御部60はその位置情報により必要な位置補正指令を可動テーブル駆動部43に伝達する。可動テーブル駆動部43はその指令に基づき可動テーブル42を駆動し、バンプ1aと基板40の電極の位置合わせがなされる。
【0025】
その後カメラ51が後退し元の位置に戻ると、タイミングt2にて圧着ツール3は再び高速下降を開始し、タイミングt3にて実装面のレベル(ニ)の少し上方の2次停止レベル(ハ)で停止する。タイミングt4にて遅延時間T2がタイムアップすると圧着ツール3は予め設定された低速度の接触点サーチクリープ速度で下降を再開する。この下降の途中でチップ1のバンプ1aは基板40の実装面(ニ)に当接し、その後はバンプ1aを実装面に押しつけながら下降する。
【0026】
この押し付ける圧着力Wの反力が圧着ツール3、チップ吸着部2およびノズル8を介して第1の昇降ブロック10に伝えられる。この反力は第2の昇降ブロック20の下降に従って増大し、この増大分が荷重センサ33の計測値の減少分として表れることになる。従って荷重測定値をFとすれば圧着力Wは、W=F0−Fで表される。すなわちこのWの値が目標圧着荷重値となるようFの値を制御部60にて監視しながら下降動作の制御を行う。
【0027】
この接触点サーチクリープ速度での下降は予め設定された第1の目標下降レベル(ホ)までである。この実装面のレベル(ニ)から第1の目標下降レベル(ホ)までの行程間で、すなわちタイミングt5からt6までの間に荷重センサー33の計測値の取り込みが行われる。前述のようにこの荷重値の減少分が圧着力に相当するから、制御部60では実装面のレベル(ニ)での荷重計測値と第1の目標下降レベル(ホ)での荷重計測値との差ΔWを計算しこの行程間での下降量Hとの比ΔW/Hで表される剛性値を計算する。
【0028】
制御部60はこの剛性値に基づき目標とされる最終圧着荷重に到達するには更にどれだけ下降すればよいかを計算し、その最終の目標下降レベル(ヘ)の手前までは荷重計測のために停止することなく連続して下降するように指令を出す。
【0029】
最終の目標下降レベル(ヘ)から予め設定された僅か上方のレベルでタイミングt7にて圧着ツール3の連続下降は停止する。その後は目標圧着荷重に至るまで荷重センサー33による荷重値のサンプリングのための停止と下降とを期間T3の間、交互に繰り返しながら小刻みに下降する(図4参照)。そしてタイミングt8にて計測荷重値が目標圧着荷重値に到達したならば制御部60は下降の停止を指令し、その後は所定の加圧保持時間T4だけ停止する。
【0030】
加圧保持時間T4のタイムアップとともにタイミングt9にて圧着ツール3は低速で上昇を開始する。その時点では図示しない真空破壊弁はすでに開にされているためチップ1は吸着状態から解放されている。その後圧着ツール3は低速上昇から高速上昇に切り換えられて待機レベル(イ)に戻り、圧着の1サイクルが完了する。
【0031】
本発明は上記実施の形態に限定されない。例えば上記実施の形態では、期間T3において、小刻みな下降を行ってチップを基板40に徐々に強く押しつけているが、この小刻みな下降動作は必ずしも行わなくてもよい。ただしこの小刻みな下降動作を若干行った方が、チップ1に過大な圧着荷重を負荷することなくより確実にチップ1を所望の力で基板40へ圧着することができる。勿論この場合も、小刻みな下降時間はわずかでよいので、タクトタイムを大巾に短縮できる。
【0032】
【発明の効果】
本発明によれば、微少な圧着荷重でも正確に計測しながらチップを圧着することができる。
【図面の簡単な説明】
【図1】本発明の一実施の形態のチップの圧着装置の側面図
【図2】本発明の一実施の形態のチップの圧着装置のチップの吸着部の部分側面図
【図3】本発明の一実施の形態のチップの圧着装置の動作タイムチャート
【図4】本発明の一実施の形態のチップの圧着装置の動作タイムチャートの部分拡大図
【符号の説明】
1 チップ
2 吸着部
3 圧着ツール
10 第1の昇降ブロック
20 第2の昇降ブロック
30 シリンダー
33 荷重センサー
40 基板
60 制御部
Claims (1)
- チップを保持するチップ保持手段を下降させてチップを基板に圧着するチップの圧着方法であって、前記チップを待機レベルから基板の実装面の上方の1次停止レベルまで高速度で下降させて一旦停止させ、この1次停止レベルにおいてカメラの鏡筒が前記チップと前記基板の間に前進して前記カメラにより前記チップとの前記基板の位置認識を行い、次いで前記チップを前記1次停止レベルから基板の実装面の上方の2次停止レベルまで再び高速度で下降させ、次いで前記高速度よりも低速でチップを下降させて前記実装面に当接させ、次いで荷重計測手段によりチップを基板に圧着する荷重を計測しながらチップを小刻みに下降させ、計測荷重値が目標値に到達したならば下降を停止させるようにしたことを特徴とするチップの圧着方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001066373A JP3606214B2 (ja) | 2001-03-09 | 2001-03-09 | チップの圧着方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001066373A JP3606214B2 (ja) | 2001-03-09 | 2001-03-09 | チップの圧着方法 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP31735296A Division JP3449139B2 (ja) | 1996-11-28 | 1996-11-28 | チップの圧着装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2001284404A JP2001284404A (ja) | 2001-10-12 |
| JP3606214B2 true JP3606214B2 (ja) | 2005-01-05 |
Family
ID=18924872
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2001066373A Expired - Fee Related JP3606214B2 (ja) | 2001-03-09 | 2001-03-09 | チップの圧着方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3606214B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006114565A (ja) * | 2004-10-12 | 2006-04-27 | Fuji Mach Mfg Co Ltd | 部品圧着装置 |
| KR101007780B1 (ko) * | 2008-08-22 | 2011-01-14 | 스테코 주식회사 | 반도체 칩 본딩방법 및 장치 |
| US11069555B2 (en) * | 2018-09-03 | 2021-07-20 | Assembleon B.V. | Die attach systems, and methods of attaching a die to a substrate |
-
2001
- 2001-03-09 JP JP2001066373A patent/JP3606214B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2001284404A (ja) | 2001-10-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US5985064A (en) | Chip compression-bonding apparatus and method | |
| US7513036B2 (en) | Method of controlling contact load in electronic component mounting apparatus | |
| US5768775A (en) | Mounting apparatus of conductive balls and mounting method thereof | |
| JP3803465B2 (ja) | 導電性ボールの移載装置および移載方法 | |
| JP4653550B2 (ja) | 半導体装置の製造装置および製造方法 | |
| JP3606214B2 (ja) | チップの圧着方法 | |
| JP3449139B2 (ja) | チップの圧着装置 | |
| JP3399324B2 (ja) | 半田バンプ付電子部品の熱圧着方法 | |
| JP3567898B2 (ja) | チップの圧着装置 | |
| JP3714097B2 (ja) | バンプ付電子部品の実装方法 | |
| JP3449140B2 (ja) | チップの圧着方法 | |
| JP3399323B2 (ja) | 半田バンプ付電子部品の熱圧着方法 | |
| JP3567897B2 (ja) | チップの圧着装置 | |
| JP2001068895A (ja) | 電子部品装着装置 | |
| JP3567896B2 (ja) | チップの圧着装置 | |
| JP3669348B2 (ja) | 電子部品圧着装置および電子部品圧着方法 | |
| JP4405012B2 (ja) | 部品認識方法及び部品実装方法 | |
| JP4034085B2 (ja) | 電子部品の圧着ヘッドの荷重検出装置および荷重検出方法 | |
| JP3551943B2 (ja) | フリップチップのボンディング装置 | |
| JPH09148790A (ja) | 電子部品装着装置 | |
| JPH05109840A (ja) | インナリ−ドボンデイング装置 | |
| JP2765190B2 (ja) | フリップチップのボンディング装置 | |
| JP3399261B2 (ja) | フリップチップのボンディング装置 | |
| JP2578932B2 (ja) | ダイボンディング装置 | |
| JP3617474B2 (ja) | フリップチップのボンディング装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20040309 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20040426 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20040525 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20040706 |
|
| A911 | Transfer of reconsideration by examiner before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20040818 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20040914 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20040927 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20071015 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20081015 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20091015 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20091015 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101015 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111015 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121015 Year of fee payment: 8 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131015 Year of fee payment: 9 |
|
| LAPS | Cancellation because of no payment of annual fees |