JP3565621B2 - 車両の旋回制御装置 - Google Patents
車両の旋回制御装置 Download PDFInfo
- Publication number
- JP3565621B2 JP3565621B2 JP16640395A JP16640395A JP3565621B2 JP 3565621 B2 JP3565621 B2 JP 3565621B2 JP 16640395 A JP16640395 A JP 16640395A JP 16640395 A JP16640395 A JP 16640395A JP 3565621 B2 JP3565621 B2 JP 3565621B2
- Authority
- JP
- Japan
- Prior art keywords
- value
- vehicle
- control
- wheel
- time
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images













































Landscapes
- Hydraulic Control Valves For Brake Systems (AREA)
- Regulating Braking Force (AREA)
Description
【産業上の利用分野】
本発明は、車両の旋回制御装置に係り、詳しくは車両のヨー運動を制御する装置に関する。
【0002】
【従来の技術】
近年、物体に取り付けることにより、物体のヨーイング(ヨー運動)を感知し、そのヨーイングの度合い、つまりヨーレイトを検出するヨーレイトセンサが実用化されている。
そして、このヨーレイトセンサを横方向の加速度センサ(横Gセンサ)や前後方向の加速度センサ(前後Gセンサ)等の他のセンサとともに車両に搭載し、その検出信号に応じて制動力等を各車輪毎に制御して車両に所望の復元モーメント又は回頭モーメントを発生させ、これにより車両の旋回を好適に制御する車両の旋回挙動制御装置(車両の旋回制御装置)が特開平3−112755号公報等に開示されている。
【0003】
【発明が解決しようとする課題】
通常、車両の旋回制御を行う際には、ポンプを作動させて液圧を発生させ、この液圧をホイールブレーキに供給するようにして車輪に制動力を発生させている。
ところで、旋回制御を速やかに実施するためには、制御開始時において充分な液圧が必要であり、このことから常時ポンプを作動させておくことが望ましいが、通常、エネルギのロスの削減等を考慮し、旋回制御を実施しない場合にあってはポンプを作動させないようにしている。
【0004】
しかしながら、このように旋回制御時においてのみポンプを作動させるようにすると、ポンプは起動後直ぐには液圧を充分に立ち上げることができないことから、液圧に応答遅れが発生し、よって良好な旋回制御ができなくなってしまう。
そこで、上記公報に開示された装置では、ポンプの応答遅れを補うべく液圧回路にアキュムレータを介装するようにしており、旋回制御開始時にはこのアキュムレータに蓄積された液圧を先ずホイールブレーキに供給するようにしている。
【0005】
ところが、このアキュムレータは、装置をより複雑なものにするとともに大きな装着スペースを必要とし、乗用車等の小型の車両に搭載するには現実的なものとはなっていない。
本発明は、上述した事情に基づきなされたものであり、その目的とするところは、コンパクトでありながら応答遅れなく速やかに旋回制御を開始可能な車両の旋回制御装置を提供することにある。
【0006】
【課題を解決するための手段】
上述の目的を達成するために、請求項1の発明は、車両のホイールブレーキに連結された液圧回路と、この液圧回路に介装されたポンプと、前記ホイールブレーキと前記ポンプとの間に設けられた圧力制御弁と、前記ポンプから吐出される液圧を前記車両の運転状態及び車両の挙動の少なくとも一方に応じて前記圧力制御弁で調圧するとともに所定のパルス周期及びその切換え時間を規定するパルス幅に基づいて前記液圧を段階的に増減圧して前記ホイールブレーキに供給し、車両の所定の車輪間に制動力差を発生させて車両のヨー運動を制御する制御手段とを備えた車両の旋回制御装置において、前記制御手段が前記ポンプの起動直後の最初のパルス周期における前記パルス幅に前記ポンプの応答遅れに対する補正時間値を加味する応答遅れ補正手段を具備し、前記応答遅れ補正手段が前記ポンプの起動後に液圧が上昇を開始するまでの時間であるポンプ固有の応答遅れ時間を補正時間値の上限とし、前記ポンプが起動してからの開始後経過時間に応じて前記補正時間値を徐々に減少させる一方、前記ポンプが停止してからの停止後経過時間に応じて前記補正時間値を徐々に増加させることに特徴を有する。
【0007】
また、請求項2の発明では、前記応答遅れ補正手段は、前記ポンプ固有の応答遅れ時間の範囲内において、前記開始後経過時間に対応する時間値を加算する一方、前記停止後経過時間に対応する時間値を減算し、これら加減算結果と前記応答遅れ時間との差を前記補正時間値とすることを特徴とする。
【0008】
また、請求項3の発明では、前記時間値は時間カウント値に基づいて算出され、前記応答遅れ補正手段は、この時間カウント値の加減算結果と前記応答遅れ時間に対応するカウント値との差に基づいて前記補正時間値を算出することを特徴とする。
また、請求項4の発明では、前記応答遅れ補正手段は、前記ポンプが起動したときには前記開始後経過時間に対応する時間値を加算し、前記ポンプが停止したときには、その加算結果を第1初期値として前記停止後経過時間に対応する時間値を減算し、更に前記ポンプが停止した後再起動したときには、その減算結果を第2初期値として第2の開始後経過時間に対応する時間値を加算することを特徴とする。
【0009】
また、請求項5の発明では、前記制御手段は、車両のヨーレイトを検出するヨーレイト検出手段と、このヨーレイト検出手段により検出される実ヨーレイトに基づき前記制動力差を設定する設定手段とを含むことを特徴とする。
また、請求項6の発明では、前記制御手段は、車両の目標ヨーレイトを設定する目標ヨーレイト設定手段を備え、前記設定手段は、前記実ヨーレイトと前記目標ヨーレイトとのヨーレイト偏差又はヨーレイト偏差の時間微分値に基づき、前記制動力差を設定することを特徴とする。
【0010】
また、請求項7の発明では、前記制御手段は、車両の旋回制動時、この旋回方向に対し前外輪と後内輪のみを制御対象車輪とし、前記制動力差に基づき、一方の車輪の制動力を増加させるとともに、他方の車輪の制動力を減少させることを特徴とする。
【0011】
【作用】
請求項1の車両の旋回制御装置によれば、車両のホイールブレーキに連結された液圧回路中のポンプが起動され、このポンプから吐出された液圧が車両の運転状態及び車両の挙動の少なくとも一方に応じて圧力制御弁で調圧され所定のパルス周期及びその切換え時間を規定するパルス幅に基づき段階的に増減圧されて前記ホイールブレーキに供給され、これにより車両の所定の車輪間に制動力差が生じて車両のヨー運動が制御されることになるが、ポンプの起動直後の最初のパルス周期における前記パルス幅には、ポンプの応答遅れに対する補正時間値、つまり、ポンプの起動後に液圧が上昇を開始するまでの時間であるポンプ固有の応答遅れ時間を補正時間値の上限とし、ポンプが起動してからの開始後経過時間に応じて徐々に減少させられる一方、ポンプが停止してからの停止後経過時間に応じて徐々に増加させられる補正時間値が加味され、ヨー運動の制御開始時にはホイールブレーキに充分なブレーキ圧が効率良く良好に供給されることになる。
【0012】
また、請求項2の車両の旋回制御装置によれば、開始後経過時間に対応する時間値が加算される一方、停止後経過時間に対応する時間値が減算され、補正時間値は、その加減算結果とポンプ固有の応答遅れ時間との差を取ることによって容易に算出される。
【0013】
また、請求項3の車両の旋回制御装置によれば、時間値は時間カウント値に基づいて算出され、補正時間値は、時間カウント値による加減算結果と応答遅れ時間に対応するカウント値との差に基づいてより容易に算出される。
また、請求項4の車両の旋回制御装置によれば、ポンプが起動したときには開始後経過時間に対応する時間値が加算され、ポンプが停止したときには、その加算結果を第1初期値として停止後経過時間に対応する時間値が減算され、更にポンプが停止した後再起動したときには、その減算結果を第2初期値として第2の開始後経過時間に対応する時間値が加算され、補正時間値は、ポンプの停止時間を加味した適正な値となる。
【0014】
また、請求項5の車両の旋回制御装置によれば、ヨーレイト検出手段により実ヨーレイトが検出され、この実ヨーレイトに基づいて制動力差が好適に設定される。
また、請求項6の車両の旋回制御装置によれば、目標ヨーレイトと実ヨーレイトとのヨーレイト偏差又はヨーレイト偏差の時間微分値が求められ、これらヨーレイト偏差又はヨーレイト偏差の時間微分値に基づいて制動力差がより好適に設定される。
【0015】
また、請求項7の車両の旋回制御装置によれば、車両の旋回制動時にあっては、旋回方向に対して前外輪、或いは後内輪の一方の車輪の制動力が増加するように制御され、他方の車輪の制動力が減少するように制御され、従って、車両に回転モーメントが効果的に発生して良好な旋回制御が実施される。
【0016】
【実施例】
図1を参照すると、車両のブレーキシステムが概略的に示されている。このブレーキシステムはタンデム型のマスタシリンダ1を備えており、マスタシリンダ1は真空ブレーキブースタ2を介してブレーキペダル3に接続されている。
マスタシリンダ1の一対の圧力室はリザーバ4にそれぞれ接続されている一方、これらの圧力室からはメインブレーキ管路5、6が延びている。
【0017】
メインブレーキ管路5,6は液圧ユニット(HU)7内を延び、そして、これらメインブレーキ管路5,6は一対の分岐ブレーキ管路にそれぞれ分岐されている。
メインブレーキ管路5からの分岐ブレーキ管路8,9は左前輪FWL及び右後輪RWRのホイールブレーキ(図示しない)にそれぞれ接続されており、メインブレーキ管路6からの分岐ブレーキ管路10,11は右前輪FWR及び左後輪RWLのホイールブレーキ(図示しない)にそれぞれ接続されている。従って、各車輪のホイールブレーキはクロス配管形式でタンデムマスタシリンダ1に接続されている。
【0018】
各分岐ブレーキ管路8,9,10,11には電磁弁がそれぞれ介挿されており、各電磁弁は入口バルブ12と出口バルブ13とから構成されている。なお、後輪のホイールブレーキとその対応する電磁弁、即ち、入口バルブ12との間にはプロポーショナルバルブ(PV)がそれぞれ介挿されている。
分岐ブレーキ管路8,9側において、その一対の電磁弁はその出口バルブ13が戻り経路14を介してリザーバ4に接続されており、また、分岐ブレーキ管路10,11側においても、その一対の電磁弁の出口バルブ13が戻り経路15を介してリザーバ4に接続されている。従って、各車輪のブレーキ圧はそのホイールブレーキ内の圧力を入口バルブ及び出口バルブの開閉により給排することで制御される。
【0019】
メインブレーキ管路5,6のそれぞれにはその途中にポンプ16,17の吐出口が逆止弁を介して接続されており、これらポンプ16,17は共通のモータ18に連結されている。一方、ポンプ16,17の吸い込み口は逆止弁を介して戻り経路14、15にそれぞれ接続されている。
更に、メインブレーキ管路5、6には、ポンプ16,17との接続点よりも上流部分に電磁弁からなるカットオフバルブ19,20が介挿されており、また、これらカットオフバルブ19,20をバイパスするようにしてリリーフバルブ21がそれぞれ配設されている。ここで、カットオフバルブ19,20はカットオフバルブユニット(CVU)22を構成している。
【0020】
前述した入口及び出口バルブ12,13やカットオフバルブ19,20、また、モータ18は、電子制御ユニット(ECU)23に電気的に接続されている。より詳しくは、ECU23は、マイクロプロセッサ、RAM,ROMなどの記憶装置、また、入出力インターフェースなどから構成されており、バルブ12,13,19,20及びモータ18は出力インタフェースに接続されている。
【0021】
一方、ECU23の入力インタフェースには、各車輪に設けた車輪速センサ24や、モータ18の回転速度を検出する回転速度センサ25が電気的に接続されている。なお、図1においては作図上の都合から、モータ18とECU23との間の接続及び回転速度センサ25とECU23との間の接続は省略されている。
更に、図2に示されているようにECU23の入力インタフェースには、車輪速センサ24や回転速度センサ25以外に、ハンドル角センサ26、ペダルストロークセンサ27、前後Gセンサ28、横Gセンサ29及びヨーレイトセンサ30が電気的に接続されている。
【0022】
ハンドル角センサ26は車両のステアリングハンドルの操舵量、即ち、ハンドル角を検出し、ペダルストロークセンサ27はブレーキペダル3の踏み込み量、即ち、ペダルストロークを検出する。前後G及び横Gセンサ28,29は車両の前後方向及び横方向に作用する前後加速度及び横加速度をそれぞれ検出し、ヨーレイトセンサ30は車両の重心周りのヨー角速度を検出する。
【0023】
ECU23は上述の各種センサのセンサ信号に基づき種々の車両運動制御に従い、HU7及びCVU22の作動を制御する。車両運動制御としては、図2中、ECU23のブロック内に示されているように、車両が旋回中にあるときのヨーモーメント制御(ヨー運動制御)、トラクションコントロール(TCL)制御、アンチスキッドブレーキ(ABS)制御、前後輪制動力配分制御などがある。
【0024】
図3を参照すると、ECU23の機能のうちでヨーモーメント制御に関連した機能がより詳しく示されており、また、図4にはそのヨーモーメント制御関連の機能を実行するメインルーチンが示されている。なお、メインループの制御周期Tは例えば8msecに設定されている。
先ず、前述した各種センサからのセンサ信号がECU23に供給されると、ECU23はセンサ信号にフィルタ処理(図3のブロック32)を施す。ここでのフィルタ処理には再帰型1次ローパスフィルタが使用されている。なお、以下、特に記載しない限り、以下のフィルタ処理にも再帰型1次ローパスフィルタが使用されるものとする。
【0025】
フィルタ処理済みのセンサ信号、即ち、車輪速Vw(i)、ハンドル角θ、ペダルストロークSt、前後加速度Gx(前後Gx)、横加速度Gy(横Gy)及びヨーレイトγは、図4のステップS1にて読み込まれ、そして、これらセンサ信号に基づいて車両の運動状態を示す情報及びドライバの運転操作を判断するため情報が算出される(ステップS2)。
【0026】
なお、ステップS1において、車輪速Vwに付した(i)は、各車輪の車輪速を纏めて示すためのものであって、iはその車輪を特定する1から4まで整数である。例えば、i=1は左前輪FWL、i=2は右前輪FWR、i=3は左後輪RWL、i=4は右後輪RWRを表す。なお、以降の参照符号に付したiもまた同様な意味で使用する。
【0027】
図3でみた場合、ステップS2の実行はその演算部34,36でそれぞれ表されており、演算部34では車輪速Vw(i)、前後Gx、横Gy及びヨーレイトγに基づき、車両の運動状態が算出され、そして、演算部36ではハンドル角Th及びペダルストロークStに基づき、ドライバによるステアリングハンドルやブレーキペダルの操作状況が判断される。
【0028】
:車両の運動状態:
基準車輪速:
先ず、車輪速Vw(i)の中から基準車輪速Vsが選択されるが、ここで、基準車輪速Vsはその駆動制御による車輪のスリップの影響を受け難い車輪、具体的には車両が非制動時の場合にあっては非駆動輪のうちで速い方の車輪速Vwに設定され、制動時の場合には車輪速Vw(i)中最速の車輪速Vwに設定される。なお、車両が非制動時にあるか否かは後述するブレーキペダル3のペダル操作によって設定されるブレーキフラグFbにより判定される。
【0029】
車体速:
次に、基準車輪速Vsに対して、車両が旋回中にある場合の内外輪間の速度差及び前後輪間の速度比を考慮して、車両の重心位置での重心速度を算出し、そして、この重心速度に基づいて車体速度を決定する。
先ず、ヨーレイトγ、フロントトレッドTf、リヤトレッドTrを使用すれば、前輪間及び後輪間での内外輪速度差ΔVif、ΔVirはそれぞれ次式で表される。
【0030】
ΔVif=γ×Tf
ΔVir=γ×Tr
従って、ここで、前輪間及び後輪間での平均内外輪速度差ΔViaは、次式で表される。
ΔVia=γ×(Tf+Tr)/2
また、前後輪間の速度比に関しては、車両の旋回中心が後車軸の延長線上にあり且つ車両が右旋回していると仮定した場合に、右側及び左側の前後輪間の速度比Rvr、Rvlは次式でそれ表される。
【0031】
Rvr=cos(δ)
Rvl≒cos(δ)
従って、左右に拘わらず前後輪間速度比Rvはcos(δ)で表すことができる。
なお、上式中、δは前輪舵角(ハンドル角/ステアリングギヤ比)を表している。
【0032】
しかしながら、上式は車両が低速時(より正確には横Gyが小さいとき)にしか成立しないため、前後輪間速度比Rvによる重心速度の補正は以下に示すように低速時のみに限定する。
Vbm≧30km/hの場合、Rv=1
Vbm<30km/hの場合、Rv=cos(δ)
ここで、Vbmは前回のルーチンにて算出された車体速を示しており、この車体速Vbの算出に関しては後述する。
【0033】
ここで、車両が前輪駆動車(FF車)であるとすると、非制動時での旋回中、基準車輪速Vsは車両の後外輪の車輪速に追従するので、その基準車輪速Vsに平均内外輪速度差ΔViaの1/2と、後車軸での速度と重心での速度の速度差による補正を加えることで、重心速度が得られる。しかしながら、その算出式の複雑化を避けるため、重心速度を前車軸での速度と後車軸での速度との中間値であるとすれば、フィルタ処理前の重心速度Vcgoは次式により算出することができる。
【0034】
Vcg0=(Vs−ΔVia/2)×(1+(1/Rv))/2
一方、制動時での旋回中にあっては、基準車輪速Vsは車両の前外輪の車輪速に追従すると考えることができるから、この場合、基準車輪速Vsに平均内外輪速度差ΔViaの1/2と、前車軸での速度と重心での速度との速度差を補正することにより、フィルタ処理前の重心速度Vcg0を下式から求めることができる。
【0035】
Vcg0=(Vs−ΔVia/2)×(1+Rv)/2
この後、重心速度Vcg0はフィルタ処理(fc=6Hz)により連続して2回処理されて重心速度Vcg(=LPF(LPF(Vcg0))が得られる。
なお、重心速度Vcgの算出にあたり、車両が非制動時であるか否かに関しては前述したブレーキフラグFbに基づいて判定される。
【0036】
通常、重心速度Vcgは車体速度Vbに一致するので、車体速Vbには重心速度Vcgが設定される。即ち、車体速Vbは通常、下式により算出される。
Vb=Vcg
しかしながら、基準車輪速Vsを有する選択車輪がロック傾向に陥り、その選択車輪に対してもABS制御が開始される状況にあっては、選択車輪のスリップに追従して基準車輪速Vsが沈み込み、実際の車体速よりも大きく低下してしまう。
【0037】
それ故、このような状況に至ると、車体速度Vsは前後Gxに基づき、以下の分離条件で重心速度Vcgから分離し、そして、以下の勾配で減少するものとして推定される。
分離判定値をGxsとした場合、dVcg/dt≦Gxsの状態が50msec継続しているか、又は、dVcg/dt≦ −1.4gの条件を満たすとき、車体速度Vsは重心速度Vcgから分離して推定される。
【0038】
ここで、分離判定値Gxsは下式により設定されている。
Gxs=−(|Gx|+0.2) 但し、−1.4g≦Gxs≦ −0.35g
上述した分離条件が満たされると、車体速度Vsは下式に基づいて推定される。
Vb=Vbm−ΔG
Vbmは分離条件が満たされる前の車体速度を示しており、ΔGは以下の条件で設定される勾配を示している。
【0039】
ΔG=(|Gx|+0.15) 但し、−1.2g≦ΔG≦ −0.3g
車体速Vbが重心速度Vcgから分離して推定されているとき、その重心速度Vcgに復帰する条件、即ち、分離終了条件は以下の通りである。
Vcg>Vbm
スリップ率:
次に、算出した車体速Vbに対し、前述した平均内外輪速度差Via及び前後輪速度比Rvの補正を加え、下式に基づき各車輪位置での参照車輪位置速度Vr(i)を算出する。
【0040】
Vr(i)=Vb×2/(1+Rv)+(or−)Via/2
ここで、上式中、第2項の正負記号に関し、車両が右旋回の場合、外側の前後輪に対応した参照車輪位置速度では(+)、内側の前後輪の前後輪に対応した参照車輪位置速度では(−)となり、これに対し、車両が左旋回の場合、その正負は逆になる。
【0041】
そして、各車輪のスリップ率Sl(i)は下式により算出された後、その算出値をフィルタ処理(fc=10Hz)して得られる。
Sl0(i)=(Vr(i)−Vw(i))/Vr(i)
Sl(i)=LPF(Sl0(i))
なお、Sl0(i)はフィルタ処理前のスリップ率を示している。
【0042】
重心スリップ角速度:
車両の旋回中心に対する角速度(車両の公転速度)をωとしたとき、重心スリップ角速度dβとヨーレイトγとの関係は次式で表される。
γ=dβ(=βg)+ω βg;重心スリップ角
ここで、重心スリップ角βgが小であると仮定し、車速をVとすれば、下式が成立する。
【0043】
Gy=V×ω
Vb=V×cos(βg)=V
上記の3式からω,Vを消去すれば、フィルタ処理前の重心スリップ角速度dβ0は、下式から得られる。
dβ0=γ−Gy/Vb
ここでも、重心スリップ角速度dβ0をフィルタ処理(fc=2Hz)することにより、次式に示すように重心スリップ角速度dβが得られる。
【0044】
dβ=LPF(dβ0)
なお、車両の旋回方向に拘わらず、重心スリップ角速度dβの正負を アンダステア(US)側が正、オーバステア(OS)側で負とするため、車両の右旋回時には、算出した重心スリップ角速度dβに(−)を乗算し、その正負を反転させる。
【0045】
また、車両の低速時、即ち、Vb<10km/hの条件が満たされるときには、計算のオーバフローを防止するため、重心スリップ角速度dβの算出を禁止し、その重心スリップ角速度dβを0とする。
:運転操作の判断:
ハンドル角速度;
今、ハンドル角θが図5に示すように変化したとする。
【0046】
ここで、ハンドル角θに変化が生じた場合でのハンドル角速度θaは、ハンドル角θの変化量をその変化に要した時間で割って求めることができる。例えば、図5に示されるているように時刻nを基準とし時刻n+4にてハンドル角θがΔθ(n+4)だけ変化したとすると、時刻n+4でのハンドル角速度θa0(n+4)は、次式により算出される。
【0047】
θa0(n+4)=Δθ(n+4)/(4×T)
なお、Tは前述したようにメインルーチンの制御周期である。
一方、ハンドル角θの変化がない状況では、ハンドル角速度θaは、ハンドル角θが最後に変化した時の変化方向と同一方向にハンドル角θが最小変化量Δθminだけ変化したと仮定し、その最小変化量Δθminを変化に要した時間で割って求められている。例えば時刻n+2でのハンドル角速度θa0(n+2)は、次式により算出される。
【0048】
θa0(n+2)=Δθmin/(2×T)
ここでも、ハンドル角速度θa0がフィルタ処理(fc=2Hz)されることで、次式からハンドル角速度θaが算出される。
θa=LPF(θa0)
ハンドル角速度実効値:
ハンドル角速度実効値θaeは、次式に示す如くハンドル角速度θaの絶対値をフィルタ処理して得られる。
【0049】
θae=LPF(|θa|)
ここでのフィルタ処理では、そのfc(カットオフ周波数)の値がハンドル角θaが増大側であるか減少側であるか否か、つまり、その値の正負によって異なっており、例えばハンドル角θaが増加する方向ではfc=20Hz、逆に、ハンドル角θaが減少する方向ではfc=0.32Hzに設定されている。
【0050】
ブレーキペダルのペダルストローク速度:
ペダルストローク速度Vstは、下式に示されているようにペダルストロークStの差分をフィルタ処理(fc=1Hz)して得られる。
Vst=LPF(St(n)−St(n−1))
ここで、St(n−1)は前回のルーチンにて読み込んだペダルストロークであり、St(n)は今回のルーチンにて読み込んだペダルストロークを示す。
【0051】
ブレーキペダルのブレーキフラグ:
前述したブレーキフラグFbは、ペダルストロークSt又はペダルストローク速度Vstに基づいて以下のように設定される。
St>Ste又はVst>50mm/sの条件が満たされるとき、Fb=1
上記の条件以外の時、Fb=0
ここで、Steは、ブレーキペダル3の踏み込みによりマスタシリンダ2内にて圧力が実際に立ち上がる踏み込み量である。
【0052】
ブレーキフラグFbは、前述したように基準車輪速Vsの選択や、重心速度Vcgの算出の際に使用される。
ブレーキペダルの踏み増しフラグ:
踏み増しフラグFppは、ペダルストローク速度Vstに基づいて以下のように設定される。
【0053】
Vst>50mm/sの場合、Fpp=1
Vst<20mm/sの場合、Fpp=0
上述した踏み増しフラグFppの設定ルーチンは図6に示されている。この設定ルーチンでは、ペダルストローク速度Vstが読み込まれると(ステップS201)、ステップS202,S204での判別結果に基づき、踏み増しフラグFppが設定される(ステップS203,S205)。
【0054】
:旋回判定:
上述したようにして車両の運動状態を示す各種の情報や、ドライバの運転操作を判断する各種の情報が得られると、図4でみて、次のステップS3では、車両の旋回判定が実施される。
図3でみた場合、旋回方向の判定は演算部38にて実施され、その詳細は図7に示されている。また、ステップS3の詳細は図8の判定ルーチンに示されている。
【0055】
ここでは、ハンドル角θとヨーレイトγに基づき、車両の旋回方向及びカウンタステアが判定される。
先ず、ハンドル角θに基づき、図7中のブロック内に示したマップMθからハンドル角ベースの旋回方向フラグFdsが決定される。具体的には、ハンドル角θが10degを正の方向に越えると、旋回方向フラグFdsに1がセットされ、この場合、その旋回方向フラグFdsは車両が右旋回していること示す。これに対し、ハンドル角θが−10degを負の方向に越えると、旋回方向フラグFdsに0がセットされ、その旋回方向フラグFdsは車両が左旋回していること示す。
【0056】
ここでのハンドル角ベースの旋回方向フラグFdsの設定は、図8中ステップS301〜S304に示されている。なお、ハンドル角θが−10deg≦θ≦10degの範囲にある場合、旋回方向フラグFdsは前回のルーチンにて設定された値に維持される。
一方、ヨーレイトγに基づき、図7中のブロック内に示したマップMγからヨーレイトベースの旋回方向フラグFdyが決定される。具体的には、ヨーレイトγが2deg/sを正の方向に越えると、旋回方向フラグFdyに1がセットされ、この場合、その旋回方向フラグFdyは車両が右旋回していることを示す。これに対し、ヨーレイトγが−2deg/sを負の方向に越えると、旋回方向フラグFdyに0がセットされ、その旋回方向フラグFdyは車両が左旋回していること示す。
【0057】
ここでのヨーレイトベースの旋回方向フラグFdyの設定は、図8中ステップS305からS308に示されており、また、ヨーレイトγが−2deg/s≦θ≦2deg/sの範囲にある場合、旋回方向フラグFdyが前回のルーチンにて設定された値に維持されることは言うまでもない。
上述したようにして旋回方向フラグFds,Fdyが設定されると、これらのうちの一方が図7中のスイッチSWfにより、旋回フラグFdとして選択される。スイッチSWfは、図7中の判定部40から出力される切り替え信号によって切り替えられる。
【0058】
即ち、少なくとも1つの前輪にABS制御が作動しており且つブレーキフラグFbに1が設定されている条件が満たされると、判定部40はスイッチSWfを図7中破線の矢印で示すように上側に切り替える切り替え信号を出力し、この場合、旋回フラグFdには下式に示すようにハンドル角ベースの旋回方向フラグFdsが選択される。
【0059】
Fd=Fds
しかしながら、上記の条件が満たされない場合、スイッチSWfは実線の矢印で示されているように切り替えられており、この場合、旋回フラグFdには下式に示すようにヨーレイトベースの旋回方向フラグFdyが選択される。
Fd=Fdy
ここでの旋回フラグFdの設定は図8中ステップS309〜S311に示されている。
【0060】
更に、旋回フラグFdが設定された後、図8中のステップS312では、旋回方向フラグFdsと旋回方向フラグFdyとの値が一致しているか否かが判別され、ここでの判別結果が真(Yes)の場合、つまり、車体のヨーイングの方向とステアリングハンドルの操作方向が不一致の場合には、カンタステアフラグFcsに1がセットされる(ステップS314)。
【0061】
これに対し、ステップS312,S313の何れかの判別結果が偽(No)となる場合には、カウンタステアフラグFcsに0がセットされる(ステップS315)。
:目標ヨーレイトの計算:
次に、図4のルーチンにてステップS3からステップS4に進むと、図3の演算部39にて車両の目標ヨーレイトが計算され、その詳細は図9のブロック線図に示されている。
【0062】
先ず、車体速Vb及び前輪舵角δが演算部42に供給され、ここで、定常ゲインを求めた後、その定常ゲインにブロック44、46で示すように2段階のフィルタ処理を施すことにより、目標ヨーレイトγtが計算される。
ここで、前輪舵角δは前述したようにステアリングギヤ比をρとすると、次式で表される。
【0063】
δ=θ/ρ
定常ゲインは車両の操舵に対するヨーレイト応答の定常値を示しており、これは車両の線形2輪モデルから導くことができ、第1段のフィルタ処理はノイズ除去用のローパスフィルタ(LPF1)が使用され、第2段のフィルタ処理には1次遅れ応答用のローパスフィルタ(LPF2)が使用される。
【0064】
従って、目標ヨーレイトγtは、次式から算出される。
γt=LPF2(LPF1(Vb /(1+A×Vb2)×(δ/L)))
上式において、Aはスタビリティファクタ、Lはホイールベースをそれぞれ示している。
:要求ヨーモーメント計算;
先のステップS4にて目標ヨーレイトγtが算出されると、図3では演算部41、また、図4のルーチンではステップS5にて要求ヨーモーメントが計算され、これら演算部41及びステップS5の詳細は図10のブロック線図及び図11のフローチャートにそれぞれ示されている。
【0065】
先ず、図10でみて、その減算部48では目標ヨーレイトγtと検出したヨーレイトγとの間のヨーレイト偏差Δγが算出される。これは、図11でみてステップS501,S502に示されている。
ここで、ステップS502では、ヨーレイト偏差Δγの正負をアンダステア(US)側で正、オーバステア(OS)側で負として統一するため、車両の左旋回時にはヨーレイト偏差Δγの正負を反転させる。なお、車両の旋回方向は前述した旋回フラグFdの値に基づいて判定することができる。
【0066】
更に、ステップS502では、算出したヨーレイト偏差Δγの絶対値をフィルタ処理することで、下式に示すように最大ヨーレイト偏差Δγmaxが算出される。
Δγmax=LPF(|Δγ|)
ここでのフィルタ処理では、ヨーレイト偏差Δγが増大しているか減少しているかによって、そのfcの値が異なっており、例えば、その増大側ではfc=10Hz、その減少側ではfc=0.08Hzに設定されている。
【0067】
なお、ヨーモーメント制御が終了したとき(後述するヨーモーメント制御開始終了フラグFymが0のとき)、最大ヨーレイト偏差Δγmaxは、下式に示されるようにヨーレイト偏差Δγの絶対値に設定される。
Δγmax=|Δγ|
次に、ヨーレイト偏差Δγは図10の微分部50にて下式に示すように、その微分値つまり差分が算出された後、フィルタ処理(fc=5Hz)されてヨーレイト偏差微分値Δγsが得られる。
【0068】
Δγs=LPF(Δγ−Δγm)
上式中、Δγmは前回のルーチンで算出されたヨーレイト偏差である。また、ここでも、ヨーレイト偏差Δγでの場合と同様な理由から、車両の左旋回時、ヨーレイト偏差微分値Δγsの正負は反転されることになる。
上述したヨーレイト偏差微分値Δγsの算出ステップは、図11のステップS503に示されている。
【0069】
この後、図10に示されているようにヨーレイト偏差微分値Δγsには乗算部52にてフィードバックゲイン、即ち、比例ゲインKpが乗算されるとともに、ヨーレイト偏差Δγには乗算部54にて積分ゲインKiが乗算され、そして、これらの乗算値は加算部56にて加算される。
更に、加算部56から出力される加算値には、乗算部58にて補正値Cpiが乗算されることで、要求ヨーモーメントγdが得られる。
【0070】
ここで、補正値Cpiは、車両が制動時であるか否かによって異なる値をとり、例えば以下のように設定されている。
制動時(Fb=1)の場合、 Cpi=1.0
非制動時(Fb=0)の場合、Cpi=1.5
上述した要求ヨーモーメントγdの算出は、図11のルーチンではステップS504,S505にて実施される。
【0071】
ステップS504は、上述した比例及び積分ゲインKp,Kiを算出するステップであり、比例ゲインKpの算出手順は図12のブロック線図に示されている。
比例ゲインKpは、USでの旋回時とOSでの旋回時とで異なる基準値Kpu(例えば、4kgm/s/(deg/s2)),Kpo(例えば、5kgm/s/(deg/s2))を有しており、これら基準値Kpu,Kpoの使用はスイッチSWpにより選択される。
【0072】
スイッチSWpは判定部60からの判定信号にて切り替えられ、この判定部60は前述したヨーレイト偏差微分値Δγsが0以上となるUS時に、スイッチSWpを基準値Kpu側に切り替える判定信号を出力する。
スイッチSWpから出力された基準値には乗算部62,64,66にて補正係数Kp1,Kp2,Kp3が順次乗算され、これにより、比例ゲインKpが算出される。
【0073】
従って、比例ゲインKpは、次式により算出される。
US時;Kp=Kpu×Kp1×Kp2×Kp3
OS時;Kp=Kpo×Kp1×Kp2×Kp3
車両が限界走行領域に至る以前の段階で、車体に対するヨーモーメント制御が作動されてしまうと、ドライバに違和感を与えてしまうため、補正係数Kp1はヨーレイト偏差Δγ又は車体の横Gyが大となるときのみ比例ゲインKpが有効に働くように、この比例ゲインKpを補正するものである。
【0074】
補正係数Kp2に関しては以下の理由から比例ゲインKpを補正するために使用されている。即ち、目標ヨーレイトγtに対しヨーレイトγを単純に追従させると、路面が低μ路の場合、図13(a)に示されているように車体の横力がその限界値に達し、車体の重心スリップ角βが増大する結果、車体がスピンしてしまう虞があり、これを防止するために補正係数Kp2が設定される。つまり、補正係数Kp2が適切に設定されると、図13(b)に示されるように車体の重心スリップ角βが小さく維持され、これにより、車体のスピンを防止できると考えられる。なお、図13中(c)は高μ路での場合を示している。
【0075】
一方、補正係数Kp3は、以下の理由から比例ゲインKpを補正するために使用されている。即ち、車両が悪路を走行しており、ヨーレイトセンサ30の出力に振動成分が加わると、その振動成分の影響がヨーレイト偏差微分値Δγsに大きく現れ、制御の誤動作や制御性の悪化を招くことになる。それ故、補正係数Kp3は比例ゲインKpを減少させて上述の不具合を防止する。
【0076】
次に、図14を参照すると、前述した積分ゲインKiの算出手順がブロック線図で示されている。ここでも、比例ゲインKpの場合と同様に基準積分ゲインKi0(例えば、10kgm/s/(deg/s))を使用し、この基準積分ゲインKi0に乗算部74,76にて順次補正係数Ki1,Ki2を乗算することで、積分ゲインKiが算出されるようになっている。従って、積分ゲインKiは下式から算出される。
【0077】
Ki=Ki0×Ki1×Ki2
補正係数Ki1は、以下の理由から積分ゲインKiを減少させるために使用されている。即ち、前輪の操舵角が増加すると、目標ヨーレイトγtの誤差がヨーレイト偏差Δγの誤差を更に拡大し、制御の誤動作を招く虞があるので、このような状況にあっては補正係数Ki1により積分ゲインKiを減少する。
【0078】
一方、補正係数Ki2は、前述した比例ゲインKpの補正係数Kp2と同様な理由から積分ゲインKiを減少させるために使用されている。
なお、これらのKp1,Kp2,Kp3及びKi1,Ki2の詳細についてはここでは説明を省略する。
:ヨーモーメント制御:
前述したようにして要求ヨーモーメントγdが算出されると、図4のメインルーチンでは次のステップS6、また、図3では演算部78のヨーモーメント制御が実施され、演算部78の詳細は図15に示されている。
【0079】
先ず、図15のヨーモーメント制御において、その制御開始終了判定部80では要求ヨーモーメントγdに基づき、制御開始終了フラグFymcが決定される。
具体的には、制御開始終了フラグFymcは、図16の判定回路にて決定される。この判定回路はOR回路81を備え、このOR回路81の2つの入力端子には要求ヨーモーメントγdに応じたオンオフ信号が入力される。
【0080】
詳細には、OR回路81の一方の入力端子には、要求モーメントγdがOS側での閾値γos(例えば−100kgm/s)よりも小のときオン信号が入力され、他方の入力端子には要求モーメントγdがUS側での閾値γus(例えば200kgm/s)よりも大のときオン信号が入力されるようになっている。従って、要求ヨーモーメントγdが何れか一方の閾値を越えたとき、OR回路81の出力端子からオン信号が出力され、このオン信号はフリップフロップ82のセット端子Sに入力される。この結果、フリップフロップ82の出力端子Qから制御開始終了フラグFymc、この場合、制御の開始を示すFymc=1が出力されることになる。
【0081】
ここで、OS側の閾値γosの絶対値(100kgm/s)はUS側の閾値γusの絶対値(200kgm/s)よりも小さくなっている。これにより、OS側では制御開始終了フラグFymc=1の出力タイミング、つまり、ヨーモーメント制御の開始タイミングは、US側での場合よりも早まることになる。
一方、フリップフロップ82のリセット端子Rには、制御開始終了フラグFymcのリセットタイミング、つまり、フリップフロップ82からFymc=0の出力タイミングを決定するためのリセット信号が供給されるようになっている。
【0082】
リセット信号を発生する回路は、図16に示されるようにスイッチ83を備えており、このスイッチ83は2つの入力端子を有している。スイッチ83の一方の入力端子には第1終了判定時間tst1(例えば152msec)が供給されており、他方の入力端子には第2終了判定時間tst2(例えば504msec)が供給されている。
スイッチ83は判定部84からの切り換え信号を受けて切り換えられるようになっており、ここで、判定部84は、車体の挙動が安定している場合、つまり、以下の条件が全て満たされている場合にはスイッチ83の出力端子から第1終了判定時間tst1(例えば152msec)を終了判定時間tstとして出力させる第1切り換え信号を出力し、上記の条件のうち1つでも満たされない場合にはスイッチ83の出力端子から第2終了判定時間tst2(例えば504msec)を終了判定時間tstとして出力させる第2切り換え信号を出力する。
【0083】
条件:目標ヨーレイトγt<10deg/s且つヨーレイトγ<10deg/s且つハンドル角速度実効値θae<200deg/s
これらの条件は、車両姿勢が安定した状態とみなせる範囲を示しており、これらの条件が満たされる場合には、もはやヨーモーメント制御を継続する必要がないと判断できる。従って、この場合には、ヨーモーメント制御を早急に終了すべきであり、上記の第1終了判定時間tst1として、例えば152msecというような短い時間が設定されている。これにより、ヨーモーメント制御は速やかに終了することとなり、ヨーモーメント制御に基づく制動力が意味なく長時間に亘って継続されることがなくなり、運転者がブレーキの引きずり感を感じることが解消される。
【0084】
一方、これらの条件を満たしていない場合には、車両は不安定な状態にあると判定でき、この場合には、ヨーモーメント制御が更に継続して実施される可能性があるとみなすことができ、上記の第2終了判定時間tst2として、例えば504msecというような比較的長い時間が適用される。従って、このときには、充分な時間が経過するまで待った後、ヨーモーメント制御が終了されることになる。
【0085】
終了判定時間tstの出力は判定部85に供給され、この判定部85では、ブレーキ圧の制御信号が保持又は非制御の状態(後述する制御モードM(i)が保持又は非制御モードである)が終了判定時間tst以上継続している条件が満たされている場合に終了指示フラグFst(i)=1を出力し、その条件が満たされない場合には終了指示フラグFst(i)=0を出力するようになっている。なお、終了指示フラグFstのiは対応する車輪を表している。また、ブレーキ圧の制御信号に関しては後述する。
【0086】
終了指示フラグFst(i)はAND回路86の入力端子にそれぞれ供給され、このAND回路86の出力端子はOR回路87の一方の入力端子に接続されている一方、その他方の入力端子には車体速Vbが10km/hよりも遅いときにオン信号が入力されるようになっている。そして、OR回路87の出力端子が前述したフリップフロップ82のリセット端子Rに接続されている。
【0087】
AND回路86は、終了指示フラグFst(i)の値が全て1であるときにオン信号をOR回路87に供給し、OR回路87はその入力側の何れかにオン信号が供給されたとき、フリップフロップ82のリセット端子Rにオン信号を供給する。つまり、車体速Vbが10km/hよりも遅くなるか、又は、ブレーキ圧の制御信号に関して前述の条件が各車輪の全てで満たされたとき、フリップフロップ82にリセット信号が供給される。
【0088】
フリップフロップ82がリセット信号を受け取ると、フリップフロップ82は、制御の終了を示す制御開始終了フラグFymc=0を出力する。
図15に示されているように制御開始終了判定部80の出力、即ち、制御開始終了フラグFymcはブレーキ圧制御モード判定部88に供給され、この判定部88では、その制御開始終了フラグFymcの値が1である場合、前述した要求ヨーモーメントγdと旋回フラグFdとに基づき、各車輪のブレーキ圧制御モードを判定する。
【0089】
先ず、図17に示されるマップから要求モーメントγdに基づき、US時及びOS時毎のブレーキ圧制御の制御実行フラグFcus,Fcosがそれらの閾値との大小関係に基づき以下のようにして設定される。
US時:γd>γdus1(=100kgm/s)の場合、 Fcus=1γd<γdus0(=80kgm/s)の場合、 Fcus=0OS時:γd<γdos1(=−80kgm/s)の場合、 Fcos=1γd>γdos0(=−60kgm/s)の場合、 Fcos=0ここに、OS側即ち復元モーメントM(−)側のヨーモーメント制御の開始される閾値γdos0(=−60kgm/s)の方がUS側即ち回頭モーメントM(+)側の制御の開始される閾値γdus0(=80kgm/s)よりもその絶対値において小さくなっている。これにより、ヨーモーメント制御は、回頭モーメントM(+)側よりも復元モーメントM(−)側の方がより実施され易くなっている。従って、車両がOS傾向にあるときには、要求モーメントγdが上述した閾値γos(例えば−100kgm/s)に達すると、即座にヨーモーメント制御が開始されることとなる。
【0090】
次に、制御実行フラグFcus,Fcosと、旋回フラグFdの組み合わせに基づき、各車輪毎のブレーキ圧制御の制御モードM(i)が選択され、この選択ルーチンは図18に示されている。
図18の制御モード選択ルーチンにおいて、先ず、旋回フラグFdの値が1であるか否かが判別され(ステップS601)、ここでの判別結果が真の場合、つまり、車両が右旋回している場合、制御実行フラグFcusの値が1であるか否かが判別される(ステップS602)。
【0091】
ここでの判別結果が真となる状況とは、旋回時における車両のUS傾向が強く、要求モーメントγdが閾値γdus1を越える大きな値であって、車両が回頭モーメントM(+)を要求していることを意味している。この場合、左前輪FWLの制御モードM(1)は減圧モードに設定されるのに対し、右後輪RWRの制御モードM(4)は増圧モードに設定され、そして、右前輪FWR及び左後輪RWLの制御モードM(2),M(3)は非制御モードに設定される(ステップS603)。
【0092】
ステップS602の判別結果が偽であると、制御実行フラグFcosの値が1であるか否かが判別される(ステップS604)。
ここでの判別結果が真となる状況とは、旋回時における車両のOS傾向が強く、要求モーメントγdが閾値γdos1未満の小さな値であって、車両が復元モーメントM(−)を要求していることを意味している。この場合には、左前輪FWLの制御モードM(1)は増圧モードに設定されるのに対し、右後輪RWRの制御モードM(4)は減圧モードに設定され、そして、右前輪FWR及び左後輪RWLの制御モードM(2),M(3)は非制御モードに設定される(ステップS605)。
【0093】
上述したステップS602,S604の判別結果がともに偽となる状況とは、その旋回時、車体のUS傾向及びOS傾向は共に強くないので、この場合、左前輪FWL及び右後輪RWRの制御モードM(1),M(4)は共に保持モードに設定され、そして、右前輪FWR及び左後輪RWLの制御モードM(2),M(3)は非制御モードに設定される(ステップS606)。
【0094】
一方、ステップS601の判別結果が偽であって、車両が左旋回している場合には、制御実行フラグFcusの値が1であるか否かが判別される(ステップS607)。
ここでの判別結果が真となる状況では前述の右旋回の場合と同様に車両が回頭モーメントM(+)を要求していることを意味しており、この場合には右旋回の場合とは逆に、右前輪FWRの制御モードM(2)が減圧モードに設定されるのに対し、左後輪RWLの制御モードM(3)が増圧モードに設定され、そして、左前輪FWL及び右後輪RWRの制御モードM(1),M(4)は非制御モードに設定される(ステップS608)。
【0095】
ステップS607の判別結果が偽であると、制御実行フラグFcosの値が1であるか否かが判別され(ステップS609)、ここでの判別結果が真の場合、車両は復元モーメントM(−)を要求しているので、右前輪FWRの制御モードM(2)が増圧モードに設定されるのに対し、左後輪RWLの制御モードM(3)が減圧モードに設定され、そして、左前輪FWL及び右後輪RWRの制御モードM(1),M(4)は非制御モードに設定される(ステップS610)。
【0096】
ステップS607,S609の判別結果がともに偽となる場合には、前述した右旋回の場合と同様に、右前輪FWRL及び左後輪RWLの制御モードM(2),M(3)は共に保持モードに設定され、そして、左前輪FWL及び右後輪RWRの制御モードM(1),M(4)は非制御モードに設定される(ステップS611)。
上述した制御モードM(i)の選択は、以下の表1に纏めて示されている。
【0097】
【表1】

上述したようにして各車輪に対する制御モードM(i)が選択されると、次のバルブ制御信号計算部89では、制御モードM(i)と要求ヨーモーメントγdとに基づき、各車輪のホイールブレーキのブレーキ圧を制御する電磁弁、即ち、入口及び出口バルブ12,13に対する制御信号が計算される。
具体的には先ず、要求ヨーモーメントを得るためのホイールブレーキ内の液圧、つまり、ブレーキ圧に対する増減圧レート(増減圧の勾配)が算出される。そして、この算出した増減圧レートに従い実際のブレーキ圧を1回当たり一定の増減圧量ΔPでもって変化させるために、その増減圧量ΔPを実現する上での入口又は出口バルブ12,13の駆動パルス、つまり、バルブ制御信号のパルス周期Tpls及びパルス幅Wpls(i)を算出する。なお、増減圧量ΔPは例えば±5kg/cm2に設定されているが、しかしながら、応答性を確保するため初回のみ増減圧量ΔPは±10kg/cm2に設定されている。この点、図19を参照すれば、ホイールブレーキ内のブレーキ圧が増減圧量ΔP毎に増減されている様子が示されている。
【0099】
入口及び出口バルブ12,13は、保持モードをベースとしてバルブ制御信号、つまり、その増圧パルス信号又は減圧パルス信号の供給を受けて駆動されることになるが、ここで、その駆動はメインルーチンの制御周期T(8msec)毎に指示されるため、実際の駆動がパルス周期Tpls毎に行われるように駆動モードMpls(i)を設定する。
【0100】
以下、前述したパルス周期Tpls、パルス幅Wpls(i)及び駆動モードMpls(i)に関して詳細に説明する。
先ず、前輪のホイールブレーキ内のブレーキ圧がΔPwcだけ変化したとき、車体のヨーモーメントの変化量ΔMzは、車体の横力を無視すれば下式で表すことができる。
【0101】
ΔMz=ΔPwc×BF×TF/2
ここで、BFはフロントブレーキ係数(kg/cm2→kg)、TFはフロントトレッドを示している。
従って、要求ヨーモーメントγdが与えられた際のブレーキ圧の増減圧レートRpwc(kg/cm2/s)は下式で表すことができる。
【0102】
Rpwc=2×γd/BF/TF
一方、1回の増減圧量ΔP(5kg/cm2又は10kg/cm2)が固定されている場合、増減圧レートRpwcとパルス周期Tplsとの関係から次式が導かれる。
|Rpwc|=ΔP/(Tpls×T(=8msec))
上記の2式からパルス周期Tplsは次式で表される。
【0103】
Tpls=ΔP×BF×TF/(2×T×|γd|)
但し、2≦Tpls≦12
なお、後輪側の入口及び出口バルブのパルス周期は前輪側のパルス周期Tplsを使用する。
次に、パルス幅Wpls(i)に関しては実験により予め設定されており、この実験ではマスタシリンダ圧及びホイールブレーキ圧(ブレーキ圧)をそれぞれ基準圧とし、この状態で、そのバルブを駆動してからホイールブレーキ圧に増減圧量ΔP(5kg/cm2又は10kg/cm2)の変化が現れる時間を計測し、この時間に基づいてパルス幅Wpls(i)は設定されている。
【0104】
ところで、ホイールブレーキ圧の増圧には、前述したポンプ16又は17からの吐出圧が利用されるため、パルス幅Wpls(i)は、ポンプ16又は17の応答遅れを考慮して設定される。以下、ポンプ16又は17固有の応答遅れ時間tyに基づくパルス幅Wpls(i)の補正値Δtyの設定手順について説明する。
先ず、応答遅れ時間tyとしては、予め実験によって求められた値が使用される。図20には、その実験結果、つまりポンプ16又は17が作動してからのブレーキ圧の時間変化をグラフにして示してある。なお、図中のポンプ16又は17の作動開始タイミングとは、カットオフバルブ19又は20、入口及び出口バルブ12,13、モータ18を同時に作動させた時点を意味している。
【0105】
同図に示すように、ブレーキ圧は、ポンプ16又は17の作動直後にあっては殆ど立ち上がっておらず、ある程度時間が経過したところで急激に増加している。従って、ポンプ16又は17の作動直後のブレーキ圧を有効なものとみなすことはできず、ここでは、ブレーキ圧に少なくとも増減圧量ΔP(5kg/cm2)に等しい変化が現れる時間を計測し、この時間を応答遅れ時間tyとしている。
【0106】
なお、この実験では、左前輪FWL、右前輪FWR、左後輪RWL及び右後輪RWRのそれぞれについての応答遅れ時間ty(i)が測定され、これらの測定結果のうち最大のものが応答遅れ時間tyとして採用される。
そして、この応答遅れ時間tyに基づき、ヨーモーメント制御中において適宜応答遅れ補正値Δtyが設定される。応答遅れ補正値Δtyの設定では、図21のフローチャートに示す応答遅れ補正値設定ルーチンが実行される。
【0107】
先ず、図21のステップS6000では、後述するモータ駆動フラグFmの値が1であるか否かが判別される。判別結果が真でモータ駆動フラグFmの値が1のときには、モータ18が作動していることを示しており、この場合には、次にステップS6002に進む。ステップS6002では、モータ18作動後の経過時間を計時するためのカウンタCNTmをカウントアップする。
【0108】
図22には、モータ駆動フラグFm、カウンタCNTm値に基づく経過時間(CNTm×T(=8msec))及びブレーキ圧の各値の時間変化を示してある。同図に示すように、モータ18が作動を開始し、モータ駆動フラグFmの値が0から1に切り換わった直後のような場合にあっては、カウント値CNTmは0から順次カウントアップされて経過時間(CNTm×T(=8msec))が増加し、これに伴ってブレーキ圧が増大することになる。
【0109】
図21のステップS6002においてカウント値CNTmをカウントアップしたら、次にステップS6006に進む。このステップS6006では、経過時間(CNTm×T(=8msec))の値が応答遅れ時間tyより大(CNTm×T(=8msec)>ty)であるか否かを判別する。
このステップS6006の判別結果が偽で、経過時間(CNTm×T(=8msec))の値が応答遅れ時間tyに未だ達していない場合には、次にステップS6008に進む。このステップS6008では、経過時間(CNTm×T(=8msec))の値が0より小(CNTm×T(=8msec)<0)であるか否かが判別されるが、ここではカウント値CNTmが値0を初期値としてカウントアップされていることから、判別結果は偽であり、次にステップS6014に進む。
【0110】
ステップS6014では、応答遅れ補正値Δtyを次式に基づき算出し設定することになる(図22参照)。
Δty=ty−(CNTm×T(=8msec))
当該ルーチンが繰り返し実施され、ステップS6006での判別結果が真、つまり経過時間(CNTm×T(=8msec))が応答遅れ時間tyに達したと判定された場合には、次にステップS6010に進む。このステップS6010では経過時間(CNTm×T(=8msec))の値を応答遅れ時間tyに固定する。
【0111】
このように経過時間(CNTm×T(=8msec))の値を応答遅れ時間tyに設定することにより、カウント値CNTmも必然的に一定となる。なお、図22に示すように、経過時間(CNTm×T(=8msec))が応答遅れ時間tyに達したときには、ブレーキ圧は上述したように5kg/cm2となっている。
ステップS6010を実行したら次にステップS6014に進む。ステップS6014では応答遅れ補正値Δtyを算出し設定することになるが、この場合には、ステップS6010の実行により(CNTm×T(=8msec))=tyであることから、Δtyの値は0となる。
【0112】
更に当該ルーチンが繰り返し実行され、ステップS6000での判別結果が偽、つまりモータ駆動フラグFmの値が1でなく0に切り替わると、モータ18は非作動状態であり、この場合には、次にステップS6004に進む。ステップS6004では、上記ステップS6002の場合とは異なり、カウント値CNTmを逆にカウントダウンする。このとき、ブレーキ圧は図22に示すように減少する。
【0113】
カウント値CNTmがカウントダウンされると、経過時間(CNTm×T(=8msec))の値は応答遅れ時間tyよりも小さくなるため、この場合にはステップS6006の判別結果は再び偽となり、次にステップS6008を実行することになる。
このとき、経過時間(CNTm×T(=8msec))の値は、カウント値CNTmがカウントダウンされるものの未だ0以上であり、ステップS6008の判別結果は偽となる。そして、上述したように、ステップS6014においてカウントダウンされたカウント値CNTmに基づく経過時間(CNTm×T(=8msec))と応答遅れ時間tyとの差から応答遅れ補正値Δtyが算出される。
【0114】
ところで、カウント値CNTmがカウントダウンされている最中にモータ駆動フラグFmの値が再び1に切り換わると、ステップS6000での判別結果は真となり、この場合には、カウントダウンされたカウント値を初期値としてカウント値CNTmは再びカウントアップされる。これにより、図22に示すように、経過時間(CNTm×T(=8msec))及びブレーキ圧は、0値にまで戻ることなく再び増加することとなる。
【0115】
このように、モータ18の再駆動により、カウント値CNTmがカウントダウンの最中に再びカウントアップされると、ブレーキ圧はある程度保持された圧力値から増加することになるため、この場合には、ブレーキ圧が5kg/cm2に達するまでにそれほど時間を要しないことになる。従って、ステップS6014で求められる応答遅れ補正値Δtyは、再びカウントアップされ始めた時点でのカウント値CNTmに対応した値となっている。
【0116】
そして、経過時間(CNTm×T(=8msec))が再び応答遅れ時間tyに達したときには応答遅れ補正値Δtyは0となり、このときにも、ブレーキ圧は、図22に示すように良好に5kg/cm2に達するようになる。
一方、ステップS6004でのカウント値CNTmのカウントダウンが継続され、ステップS6008での判別結果が真で経過時間(CNTm×T(=8msec))が0よりも小さくなった場合には、次にステップS6012に進む。このステップS6012では、経過時間(CNTm×T(=8msec))の値を0に固定する。つまり、カウント値CNTmを0とする。このように経過時間(CNTm×T(=8msec))の値が0に設定されると、次のステップS6014において算出される応答遅れ補正値Δtyは応答遅れ時間tyそのものとなる。
【0117】
以上のようにして求められた応答遅れ補正値Δtyは、パルス幅Wpls(i)の初回値に加算される。これにより、ポンプ16,17の応答遅れが補償され、必要且つ充分なブレーキ圧が得られることになり、意図した正確なヨーモーメント制御が実現可能となる。
前述した駆動モードMpls(i)は、前述した制御モードM(i)とパルス周期Tplsとに基づき、図23に示す設定ルーチンに従って設定される。この設定ルーチンでは、先ず制御モードM(i)が判定され(ステップS612)、ここで、制御モードM(i)が非制御である場合には、増圧周期カウンタCNTi(i)及び減圧周期カウンタCNTd(i)を共に0として、駆動モードMpls(i)に非制御モードが設定される(ステップS613)。
【0118】
制御モードM(i)が保持モードである場合には、駆動モードMpls(i)に保持モードが設定される(ステップS614)。
制御モードM(i)が増圧モードである場合には、増圧周期カウンタCNTi(i)のみが作動し(ステップS615)、そして、増圧周期カウンタCNTi(i)の値がパルス周期Tplsに達したか否かが判別される(ステップS616)。この時点ではその判別結果は偽であるから、次に増圧周期カウンタCNTi(i)の値が0であるか否かが判別され(ステップS617)、ここでの判別結果は真となる。従って、駆動モードMpls(i)に増圧モードが設定される(ステップS618)。
【0119】
この後のルーチンが繰り返して実行されると、ステップS617の判別結果が偽に維持されるので、駆動モードMpls(i)に保持モードが設定される(ステップS619)。
しかしながら、時間の経過に伴い、ステップS616の判別結果が真になり、増圧周期カウンタCNTi(i)の値が0にリセットされると(ステップS620)、この場合、ステップS617の判別結果が真となって、駆動モードMpls(i)に増圧モードが設定される(ステップS618)。従って、制御モードM(i)が増圧モードであるとき、駆動モードMpls(i)はパルス周期Tpls毎に増圧モードに設定されることになる。
【0120】
一方、制御モードM(i)が減圧モードである場合には、図23中のステップS621〜S625のステップがその増圧モードの場合と同様にして実行されることにより、駆動モードMpls(i)はパルス周期Tpls毎に減圧モードに設定される。
前述したようにして駆動モードMpls(i)及びパルス幅Wpls(i)が計算されると、次の増減圧禁止補正部90(図15参照)では、ドライバによるカウンタステア時やスリップの過大時、また、制御のオーバシュートを考慮してブレーキ圧の増減圧を禁止すべくパルス幅Wpls(i)が補正され、その詳細は図24のブロック線図に示されている。
【0121】
増減圧禁止補正部90に供給されたパルス幅Wpls(i)は3つのスイッチ91,92,93を経ることによりパルス幅Wpls1(i)として出力されるようになっており、これらスイッチは、設定部94,95,96にて設定されたフラグの値により、その出力をWpls1(i)=Wpls(i)又はWpls1(i)=0に切り換え可能となっている。なお、増減圧禁止補正部90では、供給された駆動モードMpls(i)がそのまま出力されるようになっている。
【0122】
先ず、設定部94では、カウンタステア時の増圧禁止フラグFk1(i)が設定される。具体的には、設定部94はAND回路97を備えており、このAND回路97の出力がスイッチ91に供給されるとともに、その各入力には対応する条件が満たされるときにオン信号がそれぞれ供給されるようになっている。ここで、各オン信号の入力条件は、自輪が後輪である場合、カウンタステアフラグFcsが1である場合、そして、制御モードM(i)が増圧モードである場合とを有して
いる。
【0123】
従って、AND回路97はその入力の全てがオン信号であるときに、増圧禁止フラグFk1(i)=1を出力し、それ以外の場合には増圧禁止フラグFk1(i)=0を出力することになる。
スイッチ91は増圧禁止フラグFk1(i)=1を受け取ると、図示の状態から切り換えられ、これにより、パルス幅Wpls1(i)に0が設定される。なお、この場合、パルス幅Wpls(i)を0にする代わりに、その値を減少させるようにしてもよい。
【0124】
図25には、増圧禁止フラグFk1(i)の設定ルーチンが示されており、このルーチンではステップS627〜S631の判別結果が全て真となるときのみ、増圧禁止フラグFk1(i)に1が設定される。なお、ステップS630において、iは前述したように車輪を区別する数値を代表して表しており、iが3又は4であるとき、その車輪は後輪となる。
【0125】
設定部95では、スリップ過大時の増圧禁止フラグFk2(i)が設定される。ここでも、設定部95はAND回路98を備えており、このAND回路98の出力がスイッチ92に供給されるとともに、その各入力には対応する条件が満たされたときにオン信号がそれぞれ供給されるようになっている。ここでのオン信号の入力条件は、スリップ率Sl(i)が許容スリップ率Slmax(i)よりも大きい場合と、制御モードM(i)が増圧モードである場合とである。
【0126】
AND回路98はその入力の全てがオン信号であるときに、増圧禁止フラグFk2(i)=1を出力し、それ以外の場合には増圧禁止フラグFk2(i)=0を出力することになる。
スイッチ92は増圧禁止フラグFk2(i)=1を受け取ると、図示の状態から切り換えられ、この場合にも、パルス幅Wpls1(i)に0が設定される。なお、この場合、パルス幅Wpls(i)を0にする代わりに、その値を減少させるようにしてもよい。
【0127】
図26を参照すると、増圧禁止フラグFk2(i)の設定手順を示す詳細なルーチンが示されており、この設定ルーチンでは、先ず、前述の制御開始終了フラグFymcの値が1であるか否か、つまり、ヨーモーメント制御中であるか否かが判別され(ステップS634)、ここでの判別結果が真の場合、その制御モードM(i)が増圧モードにある車輪(増圧車輪)に対してABS制御が作動しているか否かが判別される(ステップS635)。ここでの判別には後述するフラグFabs(i)が使用され、それ故、図24の設定部95にはフラグFabs(i)もまた供給されている。
【0128】
ステップS635での判別結果が真の場合には、そのABS制御が開始された時点での増圧車輪の判定スリップ率がSlst(i)として保持された後(ステップS636)、次のステップS638が実行される。これに対し、ステップS635の判別結果が偽の場合にはステップS636を実施することなく、ステップS638が実行される。なお、ABS制御に関しては後述する。
【0129】
一方、ステップS634の判別結果が偽の場合、つまり、ヨーモーメント制御中にない場合にあっては、判定スリップ率Slstを0にリセットした後(ステップS637)、ステップS638が実行される。
ステップS638では、判定スリップ率Slst(i)が0であるか否かが判別され、このでの判別結果が偽の場合、つまり、増圧車輪に対してABS制御が作動していない場合には、許容スリップ率Slmax(i)が算出される(ステップS639)。具体的には、許容スリップ率Slmax(i)は、図27に示すようなマップから要求ヨーモーメントγdに基づいて読み出される。ここで、許容スリップ率Slmax(i)は、図27から明らかなように要求ヨーモーメントγdが増加するに連れて所定の比率で増加する特性を有し、その最大値は20%に設定されている。
【0130】
次のステップS641では、スリップ率Sl(i)が許容スリップ率Slmax(i)よりも大きいか否かが判別され、ここでの判別結果が真の場合、増圧禁止フラグFk2(i)に1が設定され(ステップS642)、その判別結果が偽の場合には増圧禁止フラグFk2(i)に0が設定される(ステップS643)。
一方、ステップS638の判別結果が真の場合、つまり、増圧車輪に対してABS制御が作動しているような状況にあっては、許容スリップ率Slmax(i)の読み出しに使用されるマップが修正される(ステップS640)。具体的には、ステップS640では図27のマップが図28に示すマップに置き換えられる。この場合、図28から明らかなように、その許容スリップ率Slmax(i)の最大値は、判定スリップ率Slst(i)(又はSlst(i)の95%)に設定されるとともに、その増加勾配もまた判定スリップ率Slst(i)に従って変更されている。
【0131】
従って、増圧車輪に対してABS制御が作動している状況にあっては、許容スリップ率Slmax(i)が判定スリップ率Slst(i)に設定されることで、ステップS641の判別結果は真となり、これにより、増圧禁止フラグFk2(i)は1に維持されることになる。
設定部96(図24参照)では、要求ヨーモーメントγdの絶対値が所定値以上の減少傾向にある条件が満たされたときに、ブレーキ圧制御のオーバシュートを防止する防止フラグFk3=1をスイッチ93に出力し、その条件が満たされないときには防止フラグFk3=0をスイッチ93に出力する。ここでも、スイッチ93に防止フラグFk3=1が供給されたとき、スイッチ93は切り換えられ、パルス幅Wpls1(i)に0を設定する。
【0132】
図29を参照すると、防止フラグFk3の設定手順を示す詳細なルーチンが示されており、この設定ルーチンでは先ず、要求ヨーモーメントγdが読み込まれ(ステップS644)、そして、その要求ヨーモーメントγdの絶対値を微分した値Dγdが算出される(ステップS645)。更に、その微分値Dγdにはフィルタ処理(fc=2Hz)が施される(ステップS646)。
【0133】
ステップS645,S646での処理は下式で表すことができる。
Dγd=LPF(|γd|−|γdm|) γdm:前回値
次に、微分値Dγdがオーバシュートの判定値Dγov(例えば−125kgm/s2)よりも小さいか否か、つまり要求ヨーモーメントγdの絶対値の負の変化勾配が判定値Dγovよりも大きいか否かが判別され(ステップS647)、ここでの判別結果が真の場合には防止フラグFk3に1がセットされ(ステップS648)、逆に、その判別結果が偽の場合には防止フラグFk3に0がセットされる(ステップS649)。
【0134】
図15を再度参照すると、ヨーモーメント制御のブロック線図には予圧制御判定部100が含まれており、この判定部100では、ヨーモメント制御の開始に先立ち、ポンプ16,17や、入口及び出口バルブ12,13並びにカットオフバルブ19,20の作動を制御するための予圧フラグFpre1,Fpre2を設定する。具体的には、要求ヨーモーメントγdの絶対値が所定値以上に大きくなったり又は最大ヨーレイト偏差Δγmaxが所定値以上に大きくなってヨーモーメント制御が開始されるような状況に至ると、予圧フラグFpre1=1又はFpre2=1が一定の継続時間(例えば96msec)だけ設定され、その継続時間中にヨーモーメント制御が開始されると、その開始時点で予圧フラグFpre1又はFpre2は0にリセットされる。なお、予圧フラグFpre1=1は車両の右旋回時に設定され、これに対し、予圧フラグFpre2は車両の左旋回時に設定される。
【0135】
図30は、予圧制御の制御ルーチンを示すフローチャートであり、以下このフローチャートに基づいて予圧制御の制御手順をより詳しく説明する。
先ず、ステップS6020では、要求ヨーモーメントγdの絶対値が所定値以上に大きくなったか否か、つまり要求ヨーモーメントγdがUS側の所定値γpus(例えば、150kgm/s)より大きくなったか或いはOS側の所定値γpos(例えば、−80kgm/s)より小さくなったか否かが判別され、更に、最大ヨーレイト偏差Δγmaxが所定値Δγpre(例えば、6deg/s)より大きくなったか否かが判別される。
【0136】
ステップS6020での判別結果のいずれかが真、つまり要求ヨーモーメントγdが所定値γpusより大きい場合、或いは所定値γposより小さい場合、或いは最大ヨーレイト偏差Δγmaxが所定値Δγpreより大きい場合には、次にステップS6022に進む。
ステップS6022では、ブレーキペダル3が踏み込まれておらず、ブレーキフラグFbの値が0で非制動状態にあるか否か、車体速度Vbが充分有り10km/hより大きいか否か、更に、後述の終了制御中にカウントアップされるカウンタCNTfの値が38を越え、終了制御中ではないか否かがそれぞれ判別される。
【0137】
これらステップS6022での判別結果の全てが真の場合には、次にステップS6024に進む。
ステップS6024では、旋回フラグFdの値が1であるか否か、つまり旋回方向が右か左かが判別される。判別結果が真で旋回フラグFdの値が1の場合には、車両は右旋回中であり、次にステップS6026に進む。
【0138】
ステップS6026では、カウンタCNTp1の値を0に、またカウンタCNTp2の値を12に設定する。これらのカウンタCNTp1、CNTp2は、ステップS6020での判別結果が真から偽となった時点でカウントが開始されるものであり、値12が最大値となっている。なお、このようにカウンタCNTp1、CNTp2値が最大値12である場合とは、最早予圧制御を必要としていない状態を示している。
【0139】
ここに、カウンタCNTp1は、車両が右旋回(Fd=1)の場合に適用され、この場合、制御モードM(i)が非制御ではない左前輪FWLと右後輪RWRとが対象となる。一方、カウンタCNTp2は、車両が左旋回(Fd=0)の場合に適用され、制御モードM(i)が非制御ではない右前輪FWRと左後輪RWLとが対象となる。
【0140】
次のステップS6030では、前述したように、要求ヨーモーメントγdが制御開始の閾値γus(但しγus>γpus)より大きく、或いは閾値γos(但しγos<γpos)より小さくなり、Fymcの値が1となってヨーモーメント制御が開始されたか否かが判別される。
ステップS6020での判別結果が偽から真に切り換わった直後であるような場合にはステップS6030の判別結果は偽であり、この場合には、次にステップS6034に進む。
【0141】
ステップS6034では、カウンタCNTp1の値が12よりも小さいか否かが判別される。ここでは、先のステップS6026においてカウンタCNTp1の値を0に設定したので、判別結果は真であり、次にステップS6036に進む。
ステップS6036では、予圧フラグFpre1に値1を、一方予圧フラグFpre2に値0を設定する。これらの予圧フラグFpre1、Fpre2は予圧付加の実施、非実施を示すものであり、値が1の場合には予圧付加が実施されていることを、一方、値が0の場合には予圧付加が実施されていないことを示している。
【0142】
ここに、予圧フラグFpre1はカウンタCNTp1に対応したものとなっており、つまり、車両が右旋回(Fd=1)の場合であって、制御モードM(i)が非制御ではない左前輪FWLと右後輪RWRとを対象としている。一方、予圧フラグFpre2はカウンタCNTp2に対応したものとなっており、車両が左旋回(Fd=0)の場合であって、制御モードM(i)が非制御ではない右前輪FWRと左後輪RWLとを対象としている。従って、このステップS6036では、予圧フラグFpre1の値を1に設定することから、左前輪FWLと右後輪RWRに対してブレーキ圧の予圧を付加することになる。
【0143】
図31は、予圧制御が実施された場合の要求ヨーモーメントγd、最大ヨーレイト偏差Δγmax、カウンタCNTp1及び予圧フラグFpre1のそれぞれの時間変化を示したタイムチャートである。同図に示すように、要求ヨーモーメントγdが所定値γpusを越えるとカウンタCNTp1の値は0となり(ステップS6020)、このとき予圧フラグFpre1の値は0から1に切換わる(ステップS6036)。これにより予圧の付加が開始される。
【0144】
図30に戻り、ステップS6040では、カウンタCNTp2の値が12よりも小さいか否かが判別される。ここでは、先のステップS6026においてカウンタCNTp2の値を12に設定したので、判別結果は偽であり、次にステップS6044に進む。
ステップS6044では、右前輪FWRと左後輪RWLに対しては予圧を付加しないように予圧フラグFpre2に値0を改めて設定する。
【0145】
当該ルーチンが繰り返し実行されている間、ステップS6020の判別結果が真である一方、ステップS6030の判別結果が偽でヨーモーメント制御が実施されていない状態が継続される場合には、図31に示すように、予圧フラグFpre1の値は1に、予圧フラグFpre2の値は0に保持される。
しかしながら、当該ルーチンが繰り返し実行されるうちにステップS6020の判別結果が偽、つまり要求ヨーモーメントγdが所定値γpus以下、又は所定値γpos以上、或いは最大ヨーレイト偏差Δγmaxが所定値Δγpre以下となった場合には、次にステップS6046に進む。
【0146】
このステップS6046では、カウンタCNTp1の値が12より小さいか否かが判別される。ここでは、先のステップS6026においてカウンタCNTp1に値0を設定したので、判別結果は真であり、次にステップS6048に進む。
このステップS6048では、カウンタCNTp1の値をカウントアップする(図31参照)。
【0147】
次のステップS6050では、カウンタCNTp2の値が12より小さいか否かが判別される。ここでは、先のステップS6026においてカウンタCNTp2に値12を設定したので、判別結果は偽であり、この場合には、カウンタCNTp2値をカウントアップせず、上述のステップS6034に進む。
ステップS6034以降は上述した通りであり、当該ルーチンが更に繰り返し実行され、ステップS6048でカウンタCNTp1の値がカウントアップされている間は、予圧フラグFpre1の値は1に保持される。即ち、カウンタCNTp1の値が12に達するまでの間(12×T(8msec)=96msec)は予圧の付加が暫時継続されることになる。そして、カウンタCNTp1の値が12に達すると、ステップS6034での判別結果は偽となり、この場合には、次にステップS6038に進み、予圧フラグFpre1の値を1から0にリセットする(図31参照)。
【0148】
ところで、予圧の付加が実施されている最中に、ステップS6030の判別結果が真となり、要求ヨーモーメントγdが制御開始の閾値γusより大きく、或いは閾値γosより小さくなって、Fymcの値が1となりヨーモーメント制御が開始されることになると、次にステップS6032が実行される。このステップS6032では、カウンタCNTp1、CNTp2の双方の値を共に12に設定する。これにより、ステップS6034,6040での判別結果は共に偽となり、ステップS6038、6044において予圧フラグFpre1、Fpre2の値は共に0とされる。つまり、ヨーモーメント制御が開始された場合には、予圧の付加は一切実施されないことになる(図31参照)。
【0149】
なお、ステップS6024での判別結果が偽でFdの値が0であり、車両が左旋回している場合には、ステップS6028において、カウンタCNTp1の値が12に、また、カウンタCNTp2の値が0に設定される。
以降の制御手順については図30に基づいて上述した右旋回の場合と同様であるので説明を省略する。但し、カウンタCNTp2の値のカウントアップはステップS6052で実行され、予圧フラグFpre2への値1の設定はステップS6042において実行される。
【0150】
更に、図15には、制御信号の強制変更部111が含まれており、この強制変更部111の詳細は図32に示されている。強制変更部111では、パルス幅Wpls(i)及び駆動モードMpls(i)が種々の状況に応じて強制的に変更可能であり、これらパルス幅Wpls(i)及び駆動モードMpls(i)は強制変更部111を通過すると、パルス幅Wy(i)及び駆動モードMy(i)として出力される。
【0151】
図32から明らかなように駆動モードMpls(i)は、スイッチ112〜117を経て駆動モードMy(i)となり、これらスイッチ112〜117はフラグの供給を受け、そのフラグの値に従って切り換えられる。
即ち、スイッチ112は、非制御対角ホールド判定部118から出力されるフラグFhld(i)により切り換えられ、その判定部118では、車両が非制動中(Fb=0)にあってポンプ16,17の作動しているとき(後述するモータ駆動フラグFmtr=1であるとき)、非制御モードの車輪に対応したフラグFhld(i)を1に設定する。従って、この場合、スイッチ112は、駆動モードMpls(i)中の非制御モードの車輪を保持モードに強制的に切り換えた駆動モードMpls1(i)を出力し、これに対し、フラグFhld(i)=0の場合には駆動モードMpls(i)をそのまま出力する。駆動モードWpls1(i)にあっては、非制御中の車輪が保持モードに強制的に切り換えられているので、ポンプ16,17からの吐出圧がその車輪のホイールブレーキに供給されることはない。
【0152】
スイッチ113は、終了制御判定部119から出力される終了フラグFfin(i)により切り換えられる。判定部119では、ヨーモーメント制御の終了(Fymc=0)後、一定の期間(例えば304msec)の間に亘り所定の周期(例えば40msec)でもって所定時間(例えば24msec)に亘り終了フラグFfin(i)を1に設定する終了制御が実施される。
【0153】
図33は、終了制御の制御手順を示すフローチャートであり、図34には、このフローチャートに基づいて設定される右旋回の場合の終了フラグFfin(i)等の時間変化を示してある。以下、これらの図33及び図34に基づいて終了制御について説明する。
図33のステップS650では、先ず、制御開始終了フラグFymcの値が1から0に切り換わったか否か、つまり、ヨーモーメント制御の終了指令が出されたか否かが判別される。判別結果が真でフラグFymcの値が1から0に切り換わったと判定される場合には、次にステップS652に進む。
【0154】
ステップS652では、上記の一定の期間(例えば304msec)をカウントアップするカウンタCNTfの値を0にリセットする。また、終了制御を開始した時点の旋回フラグFdを終了旋回フラグFdfとして保持し、次にステップS654に進む。
一方、ステップS650の判別結果が偽でフラグFymcの値が1から0に切り換わっていない場合には、次にステップS656に進む。このステップS656では、制御開始終了フラグFymcの値が1であって、ヨーモーメント制御実施中であるか否かが判別される。この判別結果が真の場合には、次にステップS658に進み、カウンタCNTfの値を最大値である値38に設定し、上記ステップS654に進む。一方、ステップS656の判別結果が偽の場合には、何もせずにステップS654に進む。
【0155】
ステップS654では、カウンタCNTfの値が上記の38であるか否かが判別される。判別結果が真でカウンタCNTfの値が38、つまり経過時間が304(38×8)msecに達していない場合には、次のステップS660に進み、カウンタCNTfを順次カウントアップする。
ステップS662では、所定の周期(例えば40msec)までカウントアップするカウンタCNTduの値が4より大きいか否か、つまり、値が5以上で40(5×8)msecに達しているか否かが判別される。この判別結果が偽、つまりカウンタCNTduの値が4未満で経過時間が40msecに達していないと判定される場合には、次にステップS664に進む。
【0156】
ステップS664では、カウンタCNTduの値が2より小さいか否かが判別される。判別結果が真でカウンタCNTduの値が2未満の場合には、次にステップS666に進む。
ステップS666では、終了制御の制御変数である終了フラグFfin(i)の全て、つまり、終了フラグFfin(1〜4)について値を0に設定する。そして、次のステップS668では、カウンタCNTduの値が順次カウントアップされ、ステップS670に進む。
【0157】
ステップS670では、終了フラグFfin(i)の値が1であるか否かが判別される。ここでは、上述したように、終了フラグFfin(i)の値は全て0であるので、判別結果は偽となり、次にステップS672に進む。
ステップS672では、駆動モードMpls2(i)として駆動モードMpls1(i)をそのまま設定し出力することになる。従って、この場合には、図32のスイッチ113は図示の状態に保持され、図15の制御開始終了判定部80での出力Fymcの値に応じて設定された制御モードM(i)に基づく駆動モードMpls(i)がそのまま出力されることになる。ここでは、制御開始終了判定部80で既に終了判定がなされFymcの値が0となっているため、駆動モードMpls(i)、つまり駆動モードMpls1(i)は非制御のモードであり、結果的に駆動モードMpls2(i)は非制御モードとして出力される(図34参照)。
【0158】
このルーチンが繰り返し実行され、上記のカウンタCNTduの値がカウントアップされ、その値が2に達すると、ステップS664での判別結果は偽となる。この場合には、次にステップS678に進み、上記の終了旋回フラグFdfの値が1であるか否かが判別される。判別結果が真の場合、すなわち終了旋回フラグFdfの値が1で車両が右旋回中の場合には、ステップS680に進み、終了フラグFfin(i)の値のうちフラグFfin(1,4)の値のみを1に設定する。一方、終了旋回フラグFdfの値が0で車両が左旋回中の場合には、ステップS682に進み、終了フラグFfin(i)の値のうちフラグFfin(2,3)の値のみを1に設定する。
【0159】
このように、終了フラグFfin(1,4)或いは終了フラグFfin(2,3)の値が1に設定されると、ステップS668を経て実行されるステップS670での判別結果は真となり、このときには、次にステップS684に進む。この場合、図32のスイッチ113は保持側に切り換えられ、その時点の駆動モードMpls2(i)の値がそのまま保持される。そして、この保持状態は、当該ルーチンが繰り返し実行され、ステップS662での判別結果が真となるまで、つまり、所定の周期(例えば40msec)が経過するまで所定時間(例えば24msec)に亘り継続されることになる。ステップS662での判別結果が真となった場合には、次のステップS676においてカウンタCNTduの値が0にリセットされる。
【0160】
このようにして、所定の周期(例えば40msec)が繰り返し経過する毎に所定時間(例えば24msec)に亘り駆動モードMpls2(i)の値が保持され、これにより、後述するカットオフバルブ19を駆動するカット駆動フラグFvd1の値が、駆動モードMpls2(i)が非制御のときには値0となり、一方、駆動モードMpls2(i)が保持されるときには値1となる。よって、詳細は後述するように、増圧側、ここでは例えば左前輪(i=1)に負荷されるブレーキ圧の減圧と保持とが、図34中に示すようにして繰り返されることになり、ブレーキ圧は急激に変化することなく徐々に減衰することになる。
【0161】
そして、ステップS654での判別結果が偽、つまり、カウンタCNTfの値が38に達し、一定の期間(例えば304msec)が経過したと判定された場合には、ステップS674が実行され、終了フラグFfin(1,4)の値が全て0に設定されるとともにカウンタCNTduの値も0にリセットされる。これにより、終了制御が完了することになり、このとき、ブレーキ圧は、図34に示すようにマスタシリンダ1の液圧に一致することとなる。
【0162】
スイッチ114は、前述した予圧制御判定部100から出力される予圧フラグFpre1,Fpre2により切り換えられ、これら予圧フラグFpre1=1又はFpre2=1を受け取ると、スイッチ114は駆動モードMpls(i)中、その制御対象の車輪を保持モードに強制的に切り換えた駆動モードMpls3(i)を出力し、Fpre1=Fpre2=0の場合には駆動モードMpls(i)をそのまま出力する。ここで、図15に関する前述の説明では、制御開始終了判定部80からの制御開始終了フラグFymc=1の出力を受けて制御モードM(i)及び駆動モードMpls(i)が設定されるとしたが、これら制御モードM(i)及び駆動モードMpls(i)は、制御開始終了フラグFymcに拘わらず設定されている。それ故、駆動モードMpls(i)が駆動モードMpls3(i)に設定され、前述の予圧制御が開始されても、ヨーモーメント制御の開始前に、その制御対象の車輪のブレーキ圧に悪影響を与えることはない。
【0163】
なお、ここに、制御対象の車輪を完全な保持モードとせず、緩やかなパルス幅Wpls(i)で多少増圧モード気味になるようにするのがよく、これにより、制御対象の車輪のブレーキ圧を予め徐々に緩やかに増圧しておくことが可能となる。
スイッチ115は、ペダル解放判定部120から出力される解放フラグFrpにより切り換えられ、判定部120は制動時のヨーモーメント制御中、ブレーキペダル3が解放されたとき、解放フラグFrpを1に所定時間(例えば64msec)だけ設定する。解放フラグFrp=1を受け取ると、スイッチ115は駆動モードMpls(i)中、減圧モードの車輪のブレーキ圧を強制的に減圧させる駆動モードMpls4(i)を出力し、解放フラグFrp=0の場合には駆動モードMpls(i)をそのまま出力する。
【0164】
また、解放フラグFrpはスイッチ121にも供給され、Frp=1の場合、スイッチ121はパルス幅Wpls(i)の値を強制的に制御周期T(=8msec)に変更したパルス幅Wy(i)を出力し、Frp=0の場合にはパルス幅Wpls(i)をそのままパルス幅Wy(i)として出力する。
スイッチ116は、ペダル踏み増し判定部122から出力される踏み増しフラグFppにより切り換えられ、この踏み増しフラグFppは図6のルーチンに従い前述したようにして設定される。Fpp=1を受け取ると、スイッチ116は、駆動モードMpls(i)の代わりに、全ての車輪を非制御モードに強制的に切り換える駆動モードMpls5(i)を出力し、Fpp=0の場合には駆動モードMpls(i)をそのまま出力する。駆動モードがMpls5(i)に設定されると、ドライバによるブレーキペダル操作を各車輪のブレーキ圧に反映させることができる。
【0165】
スイッチ117は後退判定部123から出力される後退フラグFrevにより切り換えられ、その判定部123は、車両の変速機において、後退ギヤが選択されたとき、後退フラグFrevを1に設定し、これ以外の場合には後退フラグFrevに0を設定する。フラグFrev=1を受け取ると、スイッチ117は、駆動モードMpls(i)の代わりに、全ての車輪を非制御モードに強制的に切り換える駆動モードMy(i)を出力し、Frev=0の場合には駆動モードMpls(i)を駆動モードMy(i)として出力する。
【0166】
図15に示されているように制御信号の強制変更部111からの出力、即ち、駆動モードMy(i)及び予圧制御判定部100からのフラグは、駆動判定部124にも供給されており、この駆動判定部124の詳細は図35から図39に示されている。
先ず、図35に示す判定回路125では、各車輪のホイールシリンダ毎にカットオフバルブ19,20及びモータ18の駆動を要求するフラグFcov(i)、Fmon(i)が、図36のフローチャートに示す設定ルーチンに基づき設定される。
【0167】
判定回路125は、2つのAND回路126,127を備えており、一方のAND回路126はその入力がブレーキフラグFb=1で且つ駆動モードMy(i)が増圧モードであるとき、つまり図36のステップS6060及びステップS6062の判別結果が共に真の場合に、増圧モードであるiをOR回路128に出力する。
他方のAND回路127はその入力がブレーキフラグFb=0且つ駆動モードMy(i)が非制御モードでないとき、つまり図36のステップS6060の判別結果が偽でステップS6064の判別結果が真である場合に、非制御モードではないiをOR回路128に出力する。ここに、AND回路127の駆動モード側の入力はNOT回路129を介して供給されるようになっている。
【0168】
OR回路128は、AND回路126,127からの出力を受けると、モータ18の駆動を要求する要求フラグFmon(i)のうち、供給を受けたiに対応する要求フラグFmon(i)の値を1にして出力する(ステップS6066)。
一方、OR回路128は、AND回路126,127からの出力が無い場合には、モータ18の駆動を要求する要求フラグFmon(i)の値を0にして出力する(ステップS6070)。
【0169】
フリップフロップ130のセット端子に要求フラグFmon(i)=1が供給されると、フリップフロップ130は、カットオフバルブ19,20の駆動を要求する要求フラグFcov(i)のうち、要求フラグFmon(i)=1のiに対応した要求フラグFcov(i)の値を1として出力し続ける(ステップS6068)。
フリップフロップ130のリセット端子には駆動モードMy(i)が非制御であるとき、そのi毎にリセット信号が入力されるようになっている。従って、駆動モードMy(i)が非制御となり、フリップフロップ130がリセット信号を受けたとき、つまりステップS6072での判別結果が真の場合に、全ての要求フラグFcov(i)の値が0にリセットされる(ステップS6074)。なお、ステップS6072での判別結果が偽で駆動モードMy(i)が非制御でないときには、ステップS6074は実行されず、この場合には、ステップS6070の実行により要求フラグFmon(i)の値が0であっても、要求フラグFcov(i)の値は0にリセットされることはなく、値が1の場合には要求フラグFcov(i)は値1のまま保持される。
【0170】
次に、図37の判定回路131はOR回路132を備えており、このOR回路132はその入力である左前輪FWL及び右後輪RWR側のカットオフバルブ19に関する要求フラグFcov(1),Fcov(4) 、終了フラグFfin(1),Ffin(4)、予圧フラグFpre1の値のうちの何れかが1であるときに、カットオフバルブ19を駆動するカット駆動フラグFvd1の値を1として出力する。
【0171】
OR回路132からのカット駆動フラグFvd1は、更にスイッチ133,134を経て出力され、ここで、スイッチ133は踏み増しフラグFppによって切り換えられ、スイッチ134は後退フラグFrevによって切り換えられるようになっている。つまり、OR回路132の出力がFvd1=1であっても、踏み増しフラグFpp及び後退フラグFrevの一方が1に設定されている場合、カット駆動フラグFvd1は0にリセット(非制御モード)される。
【0172】
図38の判定回路135は、図37の判定回路131と同様な構成及び機能を有しているが、そのOR回路136には右前輪FWR及び左後輪FWL側のカットオフバルブ20に関する要求フラグFcov(2),Fcov(3),終了フラグFfin(2),Ffin(3)、予圧フラグFpre2が入力される点で判定回路131とは異なり、OR回路136は、この場合、カットオフバルブ20を駆動するカット駆動フラグFvd2をスイッチ137,138を経て出力する。
【0173】
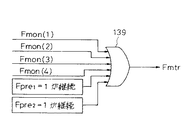
図39の判定回路、即ち、OR回路139には、モータ18の駆動を要求する車輪毎の要求フラグFmon(i)の値、又、予圧制御が作動中であることを示す予圧フラグFpre1,Fpre2の値の何れかが1であるときに、モータ駆動フラグFmtrの値を1にして出力する。
:ABS協調制御:
前述したヨーモーメント制御において、駆動モードMy(i)、パルス幅Wy(i)、カット駆動フラグFvd1,Fvd2及びモータ駆動フラグFmtrが設定されると、ABS制御との協調制御が実施される(図3の判定部78a及び図4のステップS7を参照)。
【0174】
ABS制御が作動された場合には、ABS制御に協調してヨーモーメント制御を実行するため、ABS協調制御では、ABS制御を考慮した各車輪の駆動モードMabs(i)及びパルス幅Wabs(i)が設定される。
ここで、駆動モードMabs(i)及びパルス幅Wabs(i)の設定に関しての詳細な説明は省略するが、これら駆動モードMabs(i)及びパルス幅Wabs(i)に対しても、前述した増減圧禁止補正部90(図24参照)及び制御信号強制変更部111(図32参照)での働きが反映されることに留意すべきである。
【0175】
しかしながら、ABS協調制御での1つの機能を説明すれば、ABS制御中での旋回時、車両が回頭又は復元モーメントM(−)を要求する状況にある場合、ABS協調制御では駆動モードMabs(i)及びパルス幅Wabs(i)が以下のように設定される。
即ち、図40のABS協調ルーチンに示されているようにステップS701では、ABS制御が作動中であるか否かが判別される。なお、ここでの判別は、ABS制御の作動中を車輪毎に示すフラグFabs(i)が1であるか否かに基づいてなされ、そのフラグFabs(i)は、図示しないABS制御ルーチンにて、公知の如くその車輪のスリップ率の変化動向に基づいて設定されることになる。
【0176】
ステップS701の判別結果が真であると、前述した制御実行フラグFcus又はFcosが1であるか否かが判別され(ステップS702)、ここでの判別結果が真の場合、つまり、旋回時、車両が回頭又は復元モーメントM(−)を要求しているような状況にあると、次のステップS703にて、駆動モードMabs(i)及びパルス幅Wabs(i)は以下のように設定される。
【0177】
ヨーモーメント制御が対角車輪に対して実行される場合、
1)回頭モーメントM(+)を更に得るには、旋回方向でみて内側となる前輪FWを減圧モードに設定し、そのパルス幅は外側の前輪FWのパルス幅と同一に設定する。
2)復元モーメントM(−)を更に得るには、旋回方向でみて外側となる後輪RWを減圧モードに設定し、そのパルス幅は内側の後輪のパルス幅と同一に設定する。
【0178】
なお、ヨーモーメント制御は対角車輪に限らず、前後の左右車輪間に対しても実行可能である。
つまり、左右車輪間の制動力差に基づき、ヨーモーメント制御を実行する場合、外側の車輪の制動力を増圧モードとし、内側車輪の制動力を減圧モードにすれば車両に復元モーメントM(−)を発生させることができ、これに対し、外側の車輪の制動力を減圧モードとし、内側車輪の制動力を増圧モードにすれば車両に回頭モーメントM(+)を発生させることができる。
【0179】
それ故、ヨーモーメント制御が左右の後輪間で実行される場合にあって、回頭モーメントM(+)を更に得るには、外側の前輪を減圧モードに設定し、そのパルス幅を外側後輪のパルス幅と同一に設定する。これに対し、ヨーモーメント制御が左右の前輪間で実行される場合にあって、復元モーメントM(−)を更に得るには、内側の後輪を減圧モードに設定し、そのそのパルス幅を内側前輪のパルス幅と同一に設定する。
【0180】
一方、ステップS701,S702の何れかの判別結果が偽の場合にあっては、ステップS703を実行することなく、このルーチンを終了する。
:制御信号選択:
ABS制御との協調ルーチン、つまり、図4にてステップS7を抜けると、次のステップS8では制御信号の選択ルーチンが実施され、このルーチンを実施する選択回路140は図41に示されている。なお、図41中には前述した図40のルーチンを実施するブロック141,142をも併せて示されている。
【0181】
選択回路140は4つのスイッチ143〜146を備えており、スイッチ143には、ブロック141を通過した後の駆動モードMabs(i)と、前述したヨーモーメント制御にて設定された駆動モードMy(i)が入力されるようになっており、スイッチ144には、ブロック142を通過した後のパルス幅Wabs(i)と、ヨーモーメント制御にて設定されたパルス幅Wy(i)が入力されるようになっている。
【0182】
スイッチ145には、ヨーモーメント制御にて設定されたカット駆動フラグFvd1,Fvd2と、これらフラグをリセットする0とが入力されるようになっている。そして、スイッチ146にはヨーモーメント制御にて設定されたモータ駆動フラグFmtrがOR回路147を介して入力されるとともに、ABS制御時でのモータ駆動フラグFmabsが入力され、また、このモータ駆動フラグFmabsはOR回路147の他方の入力端子にも供給されるようになっている。なお、モータ駆動フラグFmabsは、ABS制御自体によって設定されるフラグであり、ABS制御が開始されたときFmabs=1に設定される。
【0183】
上述のスイッチ143〜146は、判定部148から出力されるフラグの結果を受けて切り換えられるものとなっている。即ち、判定部148はOR回路149を備えており、OR回路149はその入力が車輪が3輪以上ABS制御中にあるか又はヨーモーメント制御での駆動モードMy(i)が減圧モードでないときに、減圧モードの車輪に対応したフラグFmy(i)=1をAND回路150に出力する。なお、車輪が3輪以上ABS制御中にあるときには、スイッチ145,146に向けてフラグFabs3=1が供給されるようになっている。
【0184】
また、AND回路150には、ABS協調制御での駆動モードMabs(i)が非制御モードでないときに駆動モードMabs(i)=1が入力され、そして、AND回路150からは、その入力のフラグFmy(i)とMabs(i)中、iの番号が一致したフラグFm_a(i)を1に設定してスイッチ143,144にそれぞれ出力するようになっている。
【0185】
車両の3輪以上がABS制御中にあると、判定部148からスイッチ145,146に向けてフラグFabs3=1がそれぞれ供給されるので、スイッチ145はカット駆動フラグFvd1,Fvd2、つまり、Fv1=Fv2=1を出力し、スイッチ146はモータ駆動フラグFmabsをFmとして出力する。これに対し、スイッチ145,146にフラグFabs3=0が供給される場合、スイッチ145はカット駆動フラグFvd1,Fvd2をそれぞれFv1,Fv2として出力し、スイッチ146はモータ駆動フラグFmtrをFmとして出力する。ここで、モータ駆動フラグFmabsはOR回路147を介してスイッチ146に供給されているから、このスイッチ146の切り換えに拘わらず、モータ駆動フラグFmabs,Fmtrの何れかが1に設定された時点で、スイッチ146からはモータ駆動フラグFm=1が出力されることになる。
【0186】
一方、AND回路150の入力条件が満たされると、そのAND回路150からスイッチ143,144にフラグFm_a(i)=1が供給され、この場合、スイッチ143は駆動モードMabs(i)を駆動モードMM(i)として出力し、スイッチ144はパルス幅Wabs(i)をパルス幅WW(i)として出力する。これに対し、スイッチ134,144にフラグFm_a(i)=0が供給されている場合には、スイッチ143は駆動モードMy(i)を駆動モードMM(i)として出力し、スイッチ144はパルス幅Wy(i)をパルス幅WW(i)として出力する。
【0187】
:駆動信号初期設定:
制御信号選択回路140から駆動モードMM(i)及びパルス幅WW(i)が出力されると、これらは図3では駆動信号初期設定部151、また、図4ではステップS9にて、実駆動モードMexe(i)及び実パルス幅Wexe(i)として設定され、そして、実駆動モードMexe(i)及び実パルス幅Wexe(i)に初期値が与えられる。
【0188】
ステップS9は図42のフローチャートに詳細に示されており、ここでは、先ず、割込禁止処理が実行された後(ステップS901)、駆動モードMM(i)が判別される(ステップS902)。
ステップS902の判別結果が非制御モードである場合には、実駆動モードMexe(i)に増圧モードが設定されるとともに実パルス幅Wexe(i)にメインルーチンの制御周期T(=8msec)が設定され(ステップS903)、そして、割込許可処理が実行された後(ステップS904)、ここでのルーチンは終了する。
【0189】
ステップS902の判別結果が増圧モードである場合には、実駆動モードMexe(i)が増圧モードであるか否かが判別される(ステップS905)。しかしながら、この時点では未だ実駆動モードMexe(i)は設定されていないので、その結果は偽となり、この場合には、実駆動モードMexe(i)に駆動モードMM(i)、即ち、増圧モードが設定されるとともに実パルス幅Wexe(i)にパルス幅WW(i)が設定された後(ステップS906)、このルーチンはステップS904を経て終了する。
【0190】
次回のルーチンが実行されたときにもステップS902の判別結果が増圧モードに維持されていると、この場合、ステップS905の判別結果は真となって、パルス幅WW(i)が実パルス幅Wexe(i)よりも小さいか否かが判別される(ステップS907)。ここで、メインルーチンが制御周期T毎に実行されることから明らかなようにパルス幅WW(i)は制御周期T毎に新たに設定されるものの、実パルス幅Wexe(i)は後述するように入口又は出口バルブが実際に駆動されると、その駆動に伴い減少するので、ステップS907での判別結果により、現時点にて、新たに設定されたパルス幅WW(i)が残りの実パルス幅Wexe(i)よりも長ければ、その実パルス幅Wexe(i)に新たなパルス幅WW(i)を設定する(ステップS908)。しかしながら、ステップS907の判別結果が偽となる場合には、その実パルス幅Wexe(i)に新たなパルスWW(i)を設定し直すことなく、残りの実パルス幅Wexe(i)が維持される。
【0191】
一方、ステップS902の判別結果が減圧モードである場合には、ステップS909からS912のステップが実施され、前述した増圧モードでの場合と同様にして、実駆動モードMexe(i)及び実パルス幅Wexe(i)が設定される。
更に、ステップS902の判別結果が減圧モードである場合には、実駆動モードMexe(i)に保持モードが設定される(ステップS913)。
【0192】
:駆動信号出力:
前述したようにして実駆動モードMexe(i)及び実パルス幅W(i)が設定されると、これらは図3では駆動信号初期設定部151からバルブ駆動部152に出力され、また、図4のメインルーチンではステップS10が実施される。
ステップS10では、実駆動モードMexe(i)及び実パルス幅Wexe(i)に加え、前述の制御信号選択ルーチンにて設定されたカット駆動フラグFv1,Fv2やモータ駆動フラグFmに基づき、カットオフバルブ19,20及びモータ18を駆動するための駆動信号もまた出力される。
【0193】
ここで、カット駆動フラグFv1がFv1=1の場合には、カットオフバルブ19を閉弁する駆動信号が出力され、カット駆動フラグFv2がFv2=1の場合には、カットオフバルブ20を閉弁する駆動信号が出力される。これに対し、カット駆動フラグFv1,Fv2が0にリセットされている場合、カットオフバルブ19、20は開弁状態に維持される。一方、モータ駆動フラグFmがFm=1の場合にはモータ18を駆動する駆動信号が出力され、Fm=0の場合、モータ18は駆動されない。
【0194】
:入口及び出口バルブの駆動:
前述したバルブ駆動部152に実駆動モードMexe(i)及び実パルス幅Wexe(i)が供給されると、このバルブ駆動部152では図43に示す駆動ルーチンに従って入口及び出口バルブ12,13を駆動する。ここで、図43の駆動ルーチンは、図4のメインルーチンとは独立して実行され、その実行周期は1msecである。
【0195】
駆動ルーチンにおいては、先ず、実駆動モードMexe(i)が判別され(ステップS1001)、ここでの判別にて、実駆動モードMexe(i)が増圧モードの場合にあっては、その実パルス幅Wexe(i)が0よりも大きか否かが判別される(ステップS1002)。ここでの判別結果が真であると、車輪に対応した入口及び出口バルブ12,13に関し、入口バルブは開弁されるのに対して出口バルブ13は閉弁され、そして、実パルス幅Wexe(i)はその実行周期だけ減少される(ステップS1003)。従って、ステップS1003が実施されるとき、モータ18が既に駆動され、そして、対応するカットオフバルブ19又は20が閉弁されていれば、車輪に対応したホイールブレーキは増圧されることになる。
【0196】
実駆動モードMexe(i)が増圧モードに維持されている状態で、駆動ルーチンが繰り返して実行され、そして、ステップS1002の判別結果が偽になると、この時点で、その車輪に対応した入口及び出口バルブ12,13に関し、これら入口及び出口バルブは共に閉弁され、そして、実駆動モードMexe(i)は保持モードに設定される(ステップS1004)。
【0197】
ステップS1001の判別にて、実駆動モードMexe(i)が減圧モードである場合にあっては、ここでも、その実パルス幅Wexe(i)が0よりも大きか否かが判別される(ステップS1005)。ここでの判別結果が真であると、車輪に対応した入口及び出口バルブ12,13に関し、入口バルブは閉弁されるのに対して出口バルブ13は開弁され、そして、実パルス幅Wexe(i)はその実行周期だけ減少される(ステップS1006)。従って、ステップS1006の実施により、車輪に対応したホイールブレーキは減圧されることになる。
【0198】
この場合にも、実駆動モードMexe(i)が減圧モードに維持されている状態で、駆動ルーチンが繰り返して実行され、そして、ステップS1005の判別結果が偽になると、この時点で、その車輪に対応した入口及び出口バルブ12,13に関し、これら入口及び出口バルブは共に閉弁され、そして、実駆動モードMexe(i)は保持モードに設定される(ステップS1007)。
【0199】
ステップS1001の判別にて、実駆動モードMexe(i)が保持モードである場合にあっては、その車輪に対応した入口及び出口バルブ12,13は共に閉弁される(ステップS1008)。
図44を参照すると、前述した駆動モードMM(i)、パルス幅WW(i)、実駆動モードMexe(i)、実パルス幅Wexe(i)の関係がタイムチャートで示されている。
【0200】
:ヨーモーメント制御の作用:
対角輪制御:
今、車両が走行中にあり、図4のメインルーチンが繰り返して実行されているとする。この状態で、メインルーチンのステップS3、即ち、図8の旋回判定ルーチンにて、ハンドル角θ及びヨーレイトγから車両の旋回を示す旋回フラグFdがFd=1に設定されていると、この場合、車両は右旋回している状態にある。
【0201】
右旋回中:
この後、メインルーチンのステップS4,S5を経て要求ヨーモーメントγdが求められ、そして、ステップS6のヨーモーメント制御が実行されると、このヨーモーメント制御では、制御開始終了フラグFymc(図16の判定回路参照)がFymc=1であることを条件として制御モードの選択ルーチンが実行され、図18の選択ルーチンに従い、各車輪毎の制御モードM(i)が設定される。
【0202】
ここでは、車両が右旋回していると仮定しているので、図18の選択ルーチンではステップS601の判別結果が真となり、ステップS602以降のステップが実施される。
US傾向の右旋回:
この場合、ステップS602の判別結果が真、つまり、制御実行フラグFcusがFcus=1であって、車両のUS傾向が強いような状況にあると、左前輪(外前輪)FWLの制御モードM(1)は減圧モードに設定されるとともに、右後輪(内後輪)RWRの制御モードM(4)は増圧モードに設定され、そして、他の2輪の制御モードM(2),M(3)はそれぞれ非制御モードに設定される(表1及びステップS603参照)。
【0203】
この後、各車輪の制御モードM(i)及ぶ要求ヨーモーメントγdに基づき、前述したようにして駆動モードMpls(i)が設定され(図23の設定ルーチン参照)、また、各車輪毎のパルス幅Wpls(i)が設定される。そして、これら駆動モードMpls(i)及びパルス幅Wpls(i)は、図15の増圧禁止補正部90及び制御信号の強制変更部111を経て、駆動モードMy(i)及びパルス幅Wy(i)となる。
【0204】
一方、図15の駆動判定部124、つまり、図35〜図39の判定回路において、図35の判定回路125では、ブレーキフラグFbがFb=1(制動中)且つ駆動モードMy(i)が増圧モードである場合、そのAND回路126及びOR回路128を介してモータ18の駆動を要求する車輪毎の要求フラグFmon(i)、また、フリップフロップ130を介してカットオフバルブ19,20の駆動を要求する車輪毎の要求フラグFcov(i)がそれぞれ1に設定される。
【0205】
具体的には、前述したようにUS傾向の強い右旋回時にあってブレーキペダル3が踏み込まれている状況では、判定回路125の出力がFmon(4)=Fcov(4)=1となり、そして、図37の判定回路131(OR回路132)からカット駆動フラグFvd1がFvd1=1として出力され、また、図39の判定回路、即ち、OR回路139からはモータ駆動フラグFmtrがFmtr=1として出力される。ここで、要求フラグFcov(2)=Fcov(3)=0であるから、図38の判定回路135(OR回路136)から出力されるカット駆動フラグFvd2に関してはFvd2=0となる。
【0206】
従って、制動時にあっては一方のカット駆動フラグ、この場合にはFvd1のみが1となる。この後、カット駆動フラグFvd1=1及びモータ駆動フラグFmtr=1は、図3の制御信号の選択部140(図41ではスイッチ145,146)を経てFv1=1,Fv2=0,Fm=1となり、そして、これらフラグは駆動信号としてカットオフバルブ19,20及びモータ18に供給される。即ち、この場合、左前輪FWL及び右後輪RWRのホイールブレーキと組をなすカットオフバルブ19のみが閉弁されるとともに、右前輪FWR及び左後輪RWLのホイールブレーキと組をなすカットオフバルブ20は開弁状態に維持されたままとなり、そして、モータ18が駆動される。このモータ18の駆動により、ポンプ16,17から圧液が吐出される。
【0207】
一方、ブレーキペダル3が踏み込まれていない非制動時の場合にあっては、左前輪FWLの制御モードM(1)及び右後輪RWRの制御モードM(4)が非制御モードではないので、判定回路125のAND回路127及びOR回路128を介して要求フラグFmon(1)=Fmon(4)=1が出力され、そして、そのフリップフロップ130からはFcov(1)=Fcov(4)=1が出力されることになる。従って、この場合にも、モータ駆動フラグFmtr=1となってモータ18、即ち、ポンプ16,17が駆動され、そして、カット駆動フラグFvd1のみが1に設定される結果、カットオフバルブ19のみが閉弁される。
【0208】
しかしながら、非制動時の場合にあっては、前述した駆動モードMpls(i)が制御信号の強制変更部111(図15)にて処理されると、その非制御対角ホールド判定部118(図32)の出力であるフラグFhldが1に設定されるので、スイッチ112が切り換えられ、非制御モードにある駆動モードMpls(i)は保持モードに強制的に変更されることに留意すべきである。
【0209】
また、非制動時(Fb=0)の場合にあっては、要求ヨーモーメントγdの算出に関し(図10参照)、その補正値Cpiが制動時の場合の1.0よりも大きい1.5に設定されているから、要求ヨーモーメントγdは嵩上げされることになる。この嵩上げは駆動モードMpls(i)、即ち、My(i)が実行されるパルス周期Tplsを短くすることになるから、駆動モードMy(i)が増圧モード又は減圧モードである場合、その増減が強力に実行されることに留意すべきである。
【0210】
この後、駆動モードMy(i)及びパルス幅Wy(i)は前述したように制御信号選択部140を経て駆動モードMM(i)及びパルス幅WW(i)として設定され、更に、これらに基づき実駆動モードMexe(i)及び実パルス幅Wexe(i)が設定される結果、実駆動モードMexe(i)及び実パルス幅Wexe(i)に従い、対応する入口及び出口バルブ12,13が駆動される(図43の駆動ルーチン参照)。
【0211】
具体的には、US傾向の強い右旋回時であって且つ制動時の場合、左前輪FWLのホイールブレーキに関してはその実駆動モードMexc(1)が減圧モードであるから、そのホイールブレーキに対応した入口バルブ12は閉弁され且つ出口バルブ13が開弁される結果(図43のステップS1006)、左前輪FWLのブレーキ圧は減少される。一方、この場合、右後輪RWRのホイールブレーキに関してはその実駆動モードMexe(4)が増圧モードであるから、そのホイールブレーキに対応した入口バルブ12は開弁され且つ出口バルブ13が閉弁される(図43のステップS1003)。ここで、この時点では、前述したようにカットオフバルブ19が閉弁され、そして、モータ18によりポンプ16,17が駆動されている状況にあるから、右後輪RWRのホイールブレーキに至る分岐ブレーキ管路8(図1参照)内の圧力はマスタシリンダ圧とは独立して既に立ち上げられており、これにより、右後輪RWRのホイールブレーキは分岐ブレーキ管路8から入口バルブ12を通じて圧液の供給を受け、この結果、右後輪RWRのブレーキ圧は増加されることになる。
【0212】
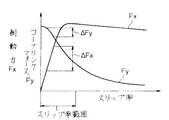
ここで、図45に示したスリップ率に対する制動力/コーナリングフォース特性を参照すると、車両が通常の走行状態にあるときのスリップ率範囲において、車輪のブレーキ圧、つまり、制動力Fxが減少するとスリップ率も減少し、これに対し、制動力Fyが増加するとスリップ率も増加することがわかり、一方、スリップ率の減少はコーナリングフォースを増加させ、これに対し、スリップ率の増加はコーナリングフォースを減少させることがわかる。
【0213】
従って、図46に示されているように左前輪FWLの制動力Fxが白矢印から黒矢印のように減少されると、そのコーナリングフォースFyは白矢印から黒矢印のように増加し、これに対し、右後輪RWRの制動力Fxが白矢印から黒矢印のように増加されると、そのコーナリングフォースFyは白矢印から黒矢印のように減少する。この結果、左前輪FWLに関してはその制動力Fxが減少することに加えてコーナリングフォースFyが強く働き、一方、右後輪RWRに関してはその制動力Fxが増加することに加えてコーナリングフォースFyが減少するので、車両にはその旋回の向きに回頭モーメントM(+)が発生する。
【0214】
なお、図46中、ハッチング矢印は制動力Fx、コーナリングフォースFyの変化分±ΔFx,±ΔFyを示している。
ここで、車両の対角車輪である左前輪FWL及び右後輪RWRにおいて、それら車輪の入口及び出口バルブ12,13は、要求ヨーモーメントγdに基づき設定された実駆動モードMexe(i)及び実パルス周期Wexe(i)に従い開閉されるので、車両に回頭モーメントM(+)を適切に付加することができ、これにより、車両のUS傾向が解消され、そのドリフトアウトを防止することができる。
【0215】
ここに、要求ヨーモーメントγdは、前述したように車両の運動状態や運転操作状態を考慮して算出されているので(図11の算出ルーチン中、ステップS504,S505参照)、その要求ヨーモーメントγdに基づき、対角車輪の制動力が増減されると、車両の旋回状態に応じたきめ細かなヨーモーメント制御が可能となる。
【0216】
また、このヨーモーメント制御では、その制御を開始するに当たり、パルス幅Wpls(i)に対し、ポンプ16,17の応答遅れを補償すべく応答遅れ補正値Δtyを加味するとともに(図21参照)、制御が開始される直前の段階で予め制御対象となる車輪のブレーキ圧を高める予圧制御(図30参照)を実施するようにしているので、制御開始時には充分なブレーキ圧が得られ、ヨーモーメント制御を極めて正確且つスムースに実施することが可能である。
【0217】
更に、ブレーキペダル3の踏込みによる通常の制動が実施されている際にヨーモーメント制御が実施される場合にあっては、制御モードMy(i)が増圧モードであるときに限ってモータ18を作動させてポンプ16,17を駆動するようにしているので(図36参照)、ブレーキペダル3に作用するポンプ16又は17の吐出圧を不要なときに低減することができ、ブレーキペダル3が反動で戻されるような違和感を運転者が感じることのないようにできる。
【0218】
OS傾向の右旋回:
図18の制御モード選択ルーチンにおいて、ステップS602の判別結果が偽であり、ステップS604の判別結果が真つまりFcos=1となり、車両のOS傾向が強い状況にあっては、左前輪FWLの制御モードM(1)が増圧モードに設定されるとともに、右後輪RWRの制御モードM(4)が減圧モードに設定される点においてUS傾向の場合とは異なる(表1及びステップS605参照)。
【0219】
ここで、車両の制動時にあっては、図47に示されているように左前輪FWLに関してはその制動力Fxが増加する一方コーナリングフォースFyが減少し、これに対し、右後輪RWRに関しては制動力Fxが減少する一方コーナリングフォースFyが増加することになるので、この場合には、車両に復元モーメントM(−)が発生する。この復元モーメントM(−)は車両のOS傾向を解消し、これにより、そのタックインに起因した車両のスピンを回避することができる。
【0220】
左旋回:
前述した旋回フラグFd及び制御開始終了フラグFymcがFd=0,Fymc=1となって左旋回でのヨーモーメント制御が実行されると、ここでも、前述の右旋回の場合と同様に、車両のUS傾向が強い状況にあっては回頭モーメントM(+)を発生させ、これに対し、そのOS傾向が強い場合には復元モーメントM(−)を発生させるべく右前輪FWR及び左後輪RWLのブレーキ圧が制御され、この結果、右旋回の場合と同様の効果を得ることができる(表1及び図18のステップS607〜S611、図43の駆動ルーチン参照)。
【0221】
なお、上記実施例では、ヨーモーメント制御を行うにあたり、ヨーレイトセンサ30からの情報に基づき要求ヨーモーメントγdを算出し、これによりヨーレイトフィードバック制御を行うようにしたが、横Gyや、車速Vと操舵角δとに応じたオープン制御を行うことも可能である。
【0222】
【発明の効果】
上述したように、請求項1の車両の旋回制御装置によれば、車両のホイールブレーキに連結された液圧回路と、この液圧回路に介装されたポンプと、ホイールブレーキとポンプとの間に設けられた圧力制御弁と、ポンプから吐出される液圧を車両の運転状態及び車両の挙動の少なくとも一方に応じて圧力制御弁で調圧するとともに所定のパルス周期及びその切換え時間を規定するパルス幅に基づいて前記液圧を段階的に増減圧してホイールブレーキに供給し、車両の所定の車輪間に制動力差を発生させて車両のヨー運動を制御する制御手段とを備えた車両の旋回制御装置において、前記制御手段がポンプの起動直後の最初のパルス周期における前記パルス幅にポンプの応答遅れに対する補正時間値を加味する応答遅れ補正手段を具備し、応答遅れ補正手段は、ポンプの起動後に液圧が上昇を開始するまでの時間であるポンプ固有の応答遅れ時間を補正時間値の上限とし、ポンプが起動してからの開始後経過時間に応じて補正時間値を徐々に減少させる一方、ポンプが停止してからの停止後経過時間に応じて補正時間値を徐々に増加させるようにしたので、アキュムレータを廃止して装置の簡素化を図るとともに、効率良くポンプの応答遅れを補償し、適正なヨー運動の制御、つまり旋回制御を実現できる。
【0224】
また、請求項2の車両の旋回制御装置によれば、応答遅れ補正手段は、ポンプ固有の応答遅れ時間の範囲内において、開始後経過時間に対応する時間値を加算する一方、停止後経過時間に対応する時間値を減算し、これら加減算結果と応答遅れ時間との差を補正時間値とするので、容易な演算によって適正な応答遅れ補償を行うことができる。
【0225】
また、請求項3の車両の旋回制御装置によれば、時間値は時間カウント値に基づいて算出され、応答遅れ補正手段は、この時間カウント値の加減算結果と応答遅れ時間に対応するカウント値との差に基づいて補正時間値を算出するので、より容易な演算によって応答遅れ補償を行うことができる。
また、請求項4の車両の旋回制御装置によれば、応答遅れ補正手段は、ポンプが起動したときには開始後経過時間に対応する時間値を加算し、ポンプが停止したときには、その加算結果を第1初期値として停止後経過時間に対応する時間値を減算し、更にポンプが停止した後再起動したときには、その減算結果を第2初期値として第2の開始後経過時間に対応する時間値を加算するので、ポンプの停止時間を加味したより正確な応答遅れ補償を行うことができる。
【0226】
また、請求項5の車両の旋回制御装置によれば、制御手段は、車両のヨーレイトを検出するヨーレイト検出手段と、このヨーレイト検出手段により検出される実ヨーレイトに基づき制動力差を設定する設定手段とを含むので、実ヨーレイトに基づく好適な制動力差を設定することができる。
また、請求項6の車両の旋回制御装置によれば、制御手段は、車両の目標ヨーレイトを設定する目標ヨーレイト設定手段を備え、設定手段は、実ヨーレイトと目標ヨーレイトとのヨーレイト偏差又はヨーレイト偏差の時間微分値に基づき、制動力差を設定するので、実ヨーレイトに基づく精度の高い制動力差を設定することができる。
【0227】
また、請求項7の車両の旋回制御装置によれば、制御手段は、車両の旋回制動時、この旋回方向に対し前外輪と後内輪のみを制御対象車輪とし、制動力差に基づき、一方の車輪の制動力を増加させるとともに、他方の車輪の制動力を減少させるので、車両に回転モーメントを効果的に発生させるようにでき、極めて良好な旋回制御を実施することができる。
【図面の簡単な説明】
【図1】ヨーモーメント制御を実行するブレーキシステムを示した概略図である。
【図2】図1のブレーキシステム中、ECU(電子制御ユニット)に対する各種センサ及びHU(ハイドロユニット)の接続関係を示した図である。
【図3】ECUの機能を概略的に説明する機能ブロック図である。
【図4】ECUが実行するメインルーチンを示したフローチャートである。
【図5】ステアリングハンドルの操作時、ハンドル角θの時間変化を示したグラフである。
【図6】図4のステップS2内の一部であるブレーキペダルの踏み増しフラグ設定ルーチンを示したフローチャートである。
【図7】図3の旋回判定部の詳細を示すブロック図である。
【図8】図3の旋回判定部にて実行される旋回判定ルーチンの詳細を示したフローチャートである。
【図9】図3の目標ヨーレイト計算部の詳細を示すブロック図である。
【図10】図3の要求ヨーモーメント計算部の詳細を示すブロック図である。
【図11】要求ヨーモーメント計算ルーチンを示したフローチャートである。
【図12】要求ヨーモーメントの計算にて、比例ゲインKpを求めるブロック図である。
【図13】車両の旋回時、重心スリップ角βに対する車体の旋回挙動を説明するための図である。
【図14】要求ヨーモーメントの計算において、その積分ゲインKiを求めるブロック図である。
【図15】図3のヨーモーメント制御部の詳細を示すブロック図である。
【図16】図15中、制御開始終了判定部の詳細を示すブロック図である。
【図17】要求ヨーモーメントの大きさに対する制御実行フラグFcus,Fcosの設定基準を示すグラフである。
【図18】制御モードの選択ルーチンを示すフローチャートである。
【図19】図18の選択ルーチンにて設定された制御モードM(i)と駆動モードMpls(i)及びパルス幅Wpls(i)との関係を示したタイムチャートである。
【図20】ポンプの応答遅れ時間tyを求めるグラフである。
【図21】応答遅れ補正値Δtyの設定ルーチンを示すフローチャートである。
【図22】図21のフローチャートに基づき設定される応答遅れ補正値Δtyの時間変化を示すタイムチャートである。
【図23】駆動モードMpls(i)の設定ルーチンを示したフローチャートである。
【図24】図15中、増減圧禁止補正部の詳細を示したブロック図である。
【図25】増減圧禁止補正部に関し、増圧禁止フラグFk1(i)の設定ルーチンを示したフローチャートである。
【図26】増減圧禁止補正部に関し、増圧禁止フラグFk2(i)の設定ルーチンを示したフローチャートである。
【図27】要求ヨーモーメントγdと許容スリップ率Slmaxとの関係を示したグラフである。
【図28】ABS制御の作動後における要求ヨーモーメントγdと許容スリップ率Slmaxとの関係を示したグラフである。
【図29】防止フラグFk3の設定ルーチンを示したフローチャートである。
【図30】予圧制御の制御手順を示すフローチャートである。
【図31】図30のフローチャートに基づき設定される、車両の右旋回時におけるカウンタCNTp1及び予圧フラグFpre1の時間変化を示すタイムチャートである。
【図32】図15中、制御信号強制変更部の詳細を示したブロック図である。
【図33】終了制御の制御ルーチンを示したフローチャートである。
【図34】図33の終了制御ルーチンによって設定された車両の右旋回時における終了フラグFfin(i)等の時間変化を示したタイムチャートである。
【図35】図15中、駆動判定部の一部を示したブロック図である。
【図36】図35に基づく要求フラグFmon(i)及びFcov(i)の設定ルーチンを示すフローチャートである。
【図37】図15中、駆動判定部の一部を示したブロック図である。
【図38】図15中、駆動判定部の一部を示したブロック図である。
【図39】図15中、駆動判定部の一部を示したブロック図である。
【図40】ABS協調ルーチンを示したフローチャートである。
【図41】図3中、制御信号選択部の詳細を示したブロック図である。
【図42】駆動信号初期設定ルーチンを示したフローチャートである。
【図43】駆動ルーチンを示したフローチャートである。
【図44】駆動モードMM(i)、パルス幅WW(i)と実駆動モードMexe(i)、実パルス幅Wexe(i)との関係を示したタイムチャートである。
【図45】スリップ率に対する制動力/コーナリングフォース特性を示したグラフである。
【図46】制動中での右旋回US時におけるヨーモーメント制御の実行結果を説明するための図である。
【図47】制動中での右旋回OS時におけるヨーモーメント制御の実行結果を説明するための図である。
【符号の説明】
2 タンデムマスタシリンダ
3 ブレーキペダル
12 入口バルブ
13 出口バルブ
16,17 ポンプ
18 モータ
19,20 カットオフバルブ
22 HU(ハイドロユニット)
23 ECU(電子制御ユニット)
24 車輪速センサ
26 ハンドル角センサ
27 ペダルストロークセンサ
28 前後Gセンサ
29 横Gセンサ
30 ヨーレイトセンサ
Claims (7)
- 車両のホイールブレーキに連結された液圧回路と、この液圧回路に介装されたポンプと、前記ホイールブレーキと前記ポンプとの間に設けられた圧力制御弁と、前記ポンプから吐出される液圧を前記車両の運転状態及び車両の挙動の少なくとも一方に応じて前記圧力制御弁で調圧するとともに所定のパルス周期及びその切換え時間を規定するパルス幅に基づいて前記液圧を段階的に増減圧して前記ホイールブレーキに供給し、車両の所定の車輪間に制動力差を発生させて車両のヨー運動を制御する制御手段とを備え、前記制御手段が前記ポンプの起動直後の最初のパルス周期におけるパルス幅に前記ポンプの応答遅れに対する補正時間値を加味する応答遅れ補正手段を備えた車両の旋回制御装置において、
前記応答遅れ補正手段は、前記ポンプの起動後に液圧が上昇を開始するまでの時間であるポンプ固有の応答遅れ時間を補正時間値の上限とし、前記ポンプが起動してからの開始後経過時間に応じて前記補正時間値を徐々に減少させる一方、前記ポンプが停止してからの停止後経過時間に応じて前記補正時間値を徐々に増加させることを特徴とする車両の旋回制御装置。 - 前記応答遅れ補正手段は、前記ポンプ固有の応答遅れ時間の範囲内において、前記開始後経過時間に対応する時間値を加算する一方、前記停止後経過時間に対応する時間値を減算し、これら加減算結果と前記応答遅れ時間との差を前記補正時間値とすることを特徴とする、請求項1記載の車両の旋回制御装置。
- 前記時間値は時間カウント値に基づいて算出され、前記応答遅れ補正手段は、この時間カウント値の加減算結果と前記応答遅れ時間に対応するカウント値との差に基づいて前記補正時間値を算出することを特徴とする、請求項2記載の車両の旋回制御装置。
- 前記応答遅れ補正手段は、前記ポンプが起動したときには前記開始後経過時間に対応する時間値を加算し、前記ポンプが停止したときには、その加算結果を第1初期値として前記停止後経過時間に対応する時間値を減算し、更に前記ポンプが停止した後再起動したときには、その減算結果を第2初期値として第2の開始後経過時間に対応する時間値を加算することを特徴とする、請求項2または3記載の車両の旋回制御装置。
- 前記制御手段は、車両のヨーレイトを検出するヨーレイト検出手段と、このヨーレイト検出手段により検出される実ヨーレイトに基づき前記制動力差を設定する設定手段とを含むことを特徴とする、請求項1乃至4のいずれか記載の車両の旋回制御装置。
- 前記制御手段は、車両の目標ヨーレイトを設定する目標ヨーレイト設定手段を備え、前記設定手段は、前記実ヨーレイトと前記目標ヨーレイトとのヨーレイト偏差又はヨーレイト偏差の時間微分値に基づき、前記制動力差を設定することを特徴とする、請求項5記載の車両の旋回制御装置。
- 前記制御手段は、車両の旋回制動時、この旋回方向に対し前外輪と後内輪のみを制御対象車輪とし、前記制動力差に基づき、一方の車輪の制動力を増加させるとともに、他方の車輪の制動力を減少させることを特徴とする、請求項1乃至6のいずれか記載の車両の旋回制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP16640395A JP3565621B2 (ja) | 1995-06-30 | 1995-06-30 | 車両の旋回制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP16640395A JP3565621B2 (ja) | 1995-06-30 | 1995-06-30 | 車両の旋回制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPH0911875A JPH0911875A (ja) | 1997-01-14 |
| JP3565621B2 true JP3565621B2 (ja) | 2004-09-15 |
Family
ID=15830779
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP16640395A Expired - Fee Related JP3565621B2 (ja) | 1995-06-30 | 1995-06-30 | 車両の旋回制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3565621B2 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5447690B2 (ja) * | 2010-11-08 | 2014-03-19 | 日産自動車株式会社 | 電動車両のブレーキ制御装置 |
| CN104860977B (zh) * | 2015-05-18 | 2018-01-12 | 衢州学院 | 一种含硅芳香族二元胺及其制备方法 |
| JP6654391B2 (ja) | 2015-09-30 | 2020-02-26 | 株式会社アドヴィックス | 液圧制御装置 |
| JP6434395B2 (ja) | 2015-10-23 | 2018-12-05 | 株式会社アドヴィックス | 液圧制御装置 |
-
1995
- 1995-06-30 JP JP16640395A patent/JP3565621B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JPH0911875A (ja) | 1997-01-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2993400B2 (ja) | 車両の旋回制御装置 | |
| JP3050092B2 (ja) | 車両の旋回制御装置 | |
| JP3708989B2 (ja) | 車両の旋回制御装置 | |
| US5645326A (en) | Turn control apparatus for a vehicle | |
| JP3257351B2 (ja) | 車両の旋回制御装置 | |
| JP3269421B2 (ja) | 車両の自動減速制御装置 | |
| JP3387692B2 (ja) | 車両の旋回制御装置 | |
| JP3565621B2 (ja) | 車両の旋回制御装置 | |
| JPH0986377A (ja) | 液圧制御装置 | |
| JP3257354B2 (ja) | 車両の旋回制御装置 | |
| JP3291980B2 (ja) | 車両の旋回制御装置 | |
| JP3669740B2 (ja) | 車両の旋回制御装置 | |
| JP3565620B2 (ja) | 車両の旋回制御装置 | |
| JP3565619B2 (ja) | 車両の旋回制御装置 | |
| JP3676429B2 (ja) | 車両の旋回制御装置 | |
| JP3676430B2 (ja) | 車両の旋回制御装置 | |
| JP3067593B2 (ja) | 車両の旋回制御装置 | |
| JP3454486B2 (ja) | 車両の旋回制御装置 | |
| JPH09226555A (ja) | 車両用制動制御装置 | |
| JP3257352B2 (ja) | 車両の旋回制御装置 | |
| JP3275646B2 (ja) | 車輌の制動力制御装置 | |
| JP3257353B2 (ja) | 車両の旋回制御装置 | |
| JPH1129024A (ja) | 車両旋回運動制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20011023 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20040608 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20080618 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090618 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100618 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110618 Year of fee payment: 7 |
|
| LAPS | Cancellation because of no payment of annual fees |