JP2022008096A - クランプ装置、クランプジョー及び容器ハンドリング装置 - Google Patents
クランプ装置、クランプジョー及び容器ハンドリング装置 Download PDFInfo
- Publication number
- JP2022008096A JP2022008096A JP2021084608A JP2021084608A JP2022008096A JP 2022008096 A JP2022008096 A JP 2022008096A JP 2021084608 A JP2021084608 A JP 2021084608A JP 2021084608 A JP2021084608 A JP 2021084608A JP 2022008096 A JP2022008096 A JP 2022008096A
- Authority
- JP
- Japan
- Prior art keywords
- clamp
- container
- jaw
- arm
- holding
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/04—Gripping heads and other end effectors with provision for the remote detachment or exchange of the head or parts thereof
- B25J15/0475—Exchangeable fingers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G47/00—Article or material-handling devices associated with conveyors; Methods employing such devices
- B65G47/74—Feeding, transfer, or discharging devices of particular kinds or types
- B65G47/84—Star-shaped wheels or devices having endless travelling belts or chains, the wheels or devices being equipped with article-engaging elements
- B65G47/846—Star-shaped wheels or wheels equipped with article-engaging elements
- B65G47/847—Star-shaped wheels or wheels equipped with article-engaging elements the article-engaging elements being grippers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G47/00—Article or material-handling devices associated with conveyors; Methods employing such devices
- B65G47/74—Feeding, transfer, or discharging devices of particular kinds or types
- B65G47/90—Devices for picking-up and depositing articles or materials
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/04—Gripping heads and other end effectors with provision for the remote detachment or exchange of the head or parts thereof
- B25J15/0408—Connections means
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Robotics (AREA)
- Filling Of Jars Or Cans And Processes For Cleaning And Sealing Jars (AREA)
- Manipulator (AREA)
Abstract
Description
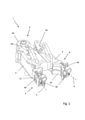
2 クランプアーム
20 枢動軸
21 差し込み領域
22 ストップ
23 凹部
24 ブランク
25 曲げ縁
26 断面輪郭
27 曲げ領域
3 クランプアームキャリア
30 作動要素
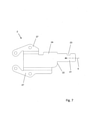
4 クランプジョー
40 ラッチング要素
41 弾性変形可能な領域
42 延在アーム
43 保持部
44 面取り部
45 マウント
46 内壁
47,47’ クランプ延在部
48 相互作用要素
5 押し込み方向
6 開放方向
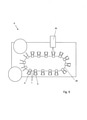
8 容器ハンドリング装置
80 クランプキャリア
82 ハンドリングユニット
84 搬送方向
9 容器
Claims (12)
- 容器ハンドリング装置(8)において容器(9)を保持するための、好ましくはボトリング工場の容器ハンドリング装置において飲料容器を保持するためのクランプ装置(1)であって、互いに対して移動可能な2つのクランプアーム(2)を備え、少なくとも1つのクランプアーム(2)が、保持されるべき容器(9)を保持するための保持部(43)を有する交換可能なクランプジョー(4)を有するクランプ装置(1)において、
前記クランプジョー(4)が、関連するクランプアーム(2)に形成された凹部(23)とのフォームフィットを行うためのラッチング要素(40)を有することを特徴とする、クランプ装置(1)。 - 前記ラッチング要素が、弾性変形可能な領域(41)を含むことを特徴とする、請求項1に記載のクランプ装置(1)。
- 前記ラッチング要素(40)が、前記クランプジョー(4)を前記関連するクランプアーム(2)上に押し込み得る押し込み方向(5)に対して逆向きに傾斜している面取り部(44)を含むことを特徴とする、請求項1又は請求項2に記載のクランプ装置(1)。
- 前記クランプジョー(4)が、前記クランプジョー(4)を前記関連するクランプアーム上に押し込む前記押し込み方向(5)に延在するマウント(45)を含み、前記マウント(45)が、前記関連するクランプジョー(4)の差し込み領域(21)を受け入れるためのものであり、好ましくは、前記クランプジョー(4)が、前記押し込み方向(5)に垂直な方向に前記マウント(45)の内壁から延在する少なくとも1つのクランプ延在部(47,47’)を有することを特徴とする、請求項1~請求項3のいずれか一項に記載のクランプ装置。
- 前記クランプジョー(4)が一体品として形成され、好ましくは3Dプリント部品として形成されていることを特徴とする、請求項1~請求項4のいずれか一項に記載のクランプ装置。
- 前記少なくとも1つのクランプアーム(2)、好ましくは、前記クランプジョー(4)を備えた前記少なくとも1つのクランプアーム(2)が射出成形の形態で設計され、且つ/又は、前記少なくとも1つのクランプアーム(2)、好ましくは、前記クランプジョー(4)を備えた前記少なくとも1つのクランプアーム(2)が、切り出された形状の金属シートから形成され、前記切り出された形状の金属シートが、好ましくは、平坦な金属シートから切り出されたブランク(24)から形成され、前記ブランク(24)が、好ましくは、曲げ加工、熱成形、冷間加工及び/又は熱間加工により形成される、請求項1~請求項5のいずれか一項に記載のクランプ装置。
- 前記ブランク(24)が前記平坦な金属シートから、ウォータージェット切断、パンチング、レーザ切断又は鋸引きにより切り出されることを特徴とする、請求項1~請求項6のいずれか一項に記載のクランプ装置(1)。
- 前記少なくとも1つのクランプアーム(2)、好ましくは、前記クランプジョー(4)を備えた前記クランプアーム(2)が、熱可塑性材料又は金属若しくは金属合金を含み、且つ/又は、前記クランプジョー(4)がプラスチック材料を含むことを特徴とする、請求項1~請求項7のいずれか一項に記載のクランプ装置(1)。
- 2つの前記クランプアーム(2)が、各々、前記関連するクランプアーム(2)に形成された凹部(23)とのフォームフィットを行うためのラッチング要素(40)を有するクランプジョー(4)を有することを特徴とする、請求項1~請求項8のいずれか一項に記載のクランプ装置(1)。
- 容器(9)をハンドリングするためのハンドリングユニット(82)を備え、且つ、クランプキャリア(80)も備えた容器ハンドリング装置(8)であって、
請求項1~請求項9のいずれか一項に記載の少なくとも1つのクランプ装置(1)が前記クランプキャリア(80)に取り付けられていることを特徴とする容器ハンドリング装置(8)。 - 前記ハンドリングユニット(82)が、容器(9)をリンスするためのリンスユニットを含むことを特徴とする、請求項10に記載の容器ハンドリング装置(8)。
- 容器ハンドリング装置(8)において容器(9)を保持するためのクランプ装置(1)の、好ましくは、ボトリング工場において飲料容器を保持するためのクランプ装置(1)のクランプアーム(2)用の交換可能なクランプジョー(4)であって、保持されるべき前記容器(9)を保持するための保持部(43)を含むクランプジョー(4)において、
前記クランプアーム(2)に形成された凹部(23)とのフォームフィットを行うためのラッチング要素(40)を有することを特徴とする、交換可能なクランプジョー(4)。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102020113599.8A DE102020113599A1 (de) | 2020-05-20 | 2020-05-20 | Klammervorrichtung, Klammerbacke und Behälterbehandlungsvorrichtung |
| DE102020113599.8 | 2020-05-20 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022008096A true JP2022008096A (ja) | 2022-01-13 |
| JP7788226B2 JP7788226B2 (ja) | 2025-12-18 |
Family
ID=76034529
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021084608A Active JP7788226B2 (ja) | 2020-05-20 | 2021-05-19 | クランプ装置、クランプジョー及び容器ハンドリング装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11806863B2 (ja) |
| EP (1) | EP3912938B1 (ja) |
| JP (1) | JP7788226B2 (ja) |
| CN (1) | CN113697474A (ja) |
| DE (1) | DE102020113599A1 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| BE1030740B1 (fr) | 2022-07-28 | 2024-02-26 | Aseptic Tech Sa | Système de manipulation de containers et procédé de manipulation |
| DE102023105126A1 (de) * | 2023-03-01 | 2024-09-05 | Krones Aktiengesellschaft | Haltebacke und Klammervorrichtung zum Halten eines Behälters |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62287893A (ja) * | 1986-05-26 | 1987-12-14 | 東京コカコーラボトリング株式会社 | 瓶内部洗浄装置 |
| JPH01317989A (ja) * | 1988-06-17 | 1989-12-22 | Murata Kogyo Kk | 搬送装置 |
| JPH04505426A (ja) * | 1989-12-29 | 1992-09-24 | 株式会社アマダ | 金属板材操作用マニピュレータ |
| US20170066139A1 (en) * | 2015-09-09 | 2017-03-09 | Carbon Robotics, Inc. | Reconfigurable robotic system and methods |
| JP2017054840A (ja) * | 2015-09-07 | 2017-03-16 | パナソニックIpマネジメント株式会社 | 部品実装装置 |
| JP2019150944A (ja) * | 2017-12-11 | 2019-09-12 | クロネス アーゲー | アクティブ把持装置 |
Family Cites Families (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE226826C (ja) | ||||
| US4676541A (en) * | 1982-11-27 | 1987-06-30 | Cleveland-Guest (Engineering) Limited | Robot hand |
| DD226826A1 (de) | 1984-09-07 | 1985-09-04 | Smab Forsch Entw Rat | Auswechselbare greiferfinger |
| US4621409A (en) * | 1985-03-06 | 1986-11-11 | Westinghouse Electric Corp. | Harness formation finger interchange |
| DE3602839A1 (de) * | 1986-01-30 | 1987-08-06 | Fraunhofer Ges Forschung | Aufnahmeeinrichtung |
| US4961492A (en) * | 1988-07-22 | 1990-10-09 | Simplimatic Engineering Company | Article carrying conveyor and wearstrip set therefor |
| DE9003313U1 (de) * | 1990-03-21 | 1990-05-23 | Fritz Schäfer GmbH, 5908 Neunkirchen | Befestigungs- und/oder Haltevorrichtung für Röllchenleisten auf Trägerschienen o.dgl., insbesondere von Durchlaufregalen |
| ITRM20020147A1 (it) | 2002-03-18 | 2003-09-18 | Sipa Spa | Dispositivo di presa a pinza per bottiglie e simili. |
| US7328925B1 (en) * | 2003-04-04 | 2008-02-12 | Bouncing Brain Innovations Season Two Subsidiary 17, Llc | Gripper for plastic bag handles |
| DE20305988U1 (de) | 2003-04-14 | 2003-07-03 | Tyrolon-Schulnig Ges.M.B.H., Hochfilzen | Transportstern |
| FR2903927B1 (fr) * | 2006-07-21 | 2008-09-05 | Sidel Participations | Dispositif d'assemblage rapide d'outillage sur support. |
| DE102007048861A1 (de) | 2007-10-11 | 2009-04-16 | Robert Bosch Gmbh | Reinigungseinrichtung mit verbessertem Transportsystem |
| DE102009003595A1 (de) * | 2009-03-10 | 2010-09-16 | Bucyrus Europe Gmbh | Kratzer für Kettenkratzförderer |
| IT1394320B1 (it) | 2009-05-07 | 2012-06-06 | Mbf Spa | Macchina per trattare contenitori, in particolare in un impianto di imbottigliamento di prodotti alimentari |
| JP5892765B2 (ja) * | 2011-10-24 | 2016-03-23 | 川崎重工業株式会社 | ロボットハンド用交換爪モジュール |
| DE102014101959A1 (de) * | 2014-02-17 | 2015-08-20 | Khs Gmbh | Werkzeuglos befestigter Schutzkörper zum Schutz von Glasflaschen in Sterntaschen |
| DE102016004087A1 (de) * | 2016-02-15 | 2017-08-17 | Kastanienbaum GmbH | Effektoreinheit für einen Roboter, Arbeitsvorrichtung mit einem Roboter und Verfahren zum Wechseln eines Effektors bei Robotern |
| TWM539498U (zh) * | 2016-11-10 | 2017-04-11 | guo-rong Luo | 組織蠟塊之運載系統 |
| JP6551805B2 (ja) * | 2017-03-06 | 2019-07-31 | パナソニックIpマネジメント株式会社 | 部品実装装置及び部品実装方法 |
| DE102017105024B4 (de) | 2017-03-09 | 2021-02-11 | Tyrolon-Schulnig Gmbh | Rinsersystem |
| IT201800000708A1 (it) * | 2018-01-11 | 2019-07-11 | Pe Labellers Spa | Stella di trasporto di contenitori. |
| CN110406886B (zh) * | 2019-08-16 | 2024-05-31 | 上海牧森自动化设备有限公司 | 一种输送侧板组合体 |
| CN110802624B (zh) * | 2019-11-22 | 2020-11-13 | 合肥常青机械股份有限公司 | 一种抓手可更换型机器手臂 |
-
2020
- 2020-05-20 DE DE102020113599.8A patent/DE102020113599A1/de active Pending
-
2021
- 2021-05-19 JP JP2021084608A patent/JP7788226B2/ja active Active
- 2021-05-19 US US17/324,391 patent/US11806863B2/en active Active
- 2021-05-19 CN CN202110546532.5A patent/CN113697474A/zh active Pending
- 2021-05-20 EP EP21174987.4A patent/EP3912938B1/de active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62287893A (ja) * | 1986-05-26 | 1987-12-14 | 東京コカコーラボトリング株式会社 | 瓶内部洗浄装置 |
| JPH01317989A (ja) * | 1988-06-17 | 1989-12-22 | Murata Kogyo Kk | 搬送装置 |
| JPH04505426A (ja) * | 1989-12-29 | 1992-09-24 | 株式会社アマダ | 金属板材操作用マニピュレータ |
| JP2017054840A (ja) * | 2015-09-07 | 2017-03-16 | パナソニックIpマネジメント株式会社 | 部品実装装置 |
| US20170066139A1 (en) * | 2015-09-09 | 2017-03-09 | Carbon Robotics, Inc. | Reconfigurable robotic system and methods |
| JP2019150944A (ja) * | 2017-12-11 | 2019-09-12 | クロネス アーゲー | アクティブ把持装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| DE102020113599A1 (de) | 2021-11-25 |
| JP7788226B2 (ja) | 2025-12-18 |
| EP3912938B1 (de) | 2025-07-30 |
| CN113697474A (zh) | 2021-11-26 |
| EP3912938A1 (de) | 2021-11-24 |
| US11806863B2 (en) | 2023-11-07 |
| EP3912938C0 (de) | 2025-07-30 |
| US20210362350A1 (en) | 2021-11-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2022008096A (ja) | クランプ装置、クランプジョー及び容器ハンドリング装置 | |
| US10661451B2 (en) | Clamp gripping device and system consisting of such devices | |
| EP3678839B1 (fr) | Installation de transport de preformes equipee d'un dispositif d'indexage angulaire de tournettes | |
| CN104540755B (zh) | 容器抓持器和带有该容器抓持器的输送元件 | |
| CN104736294B (zh) | 接合结构 | |
| KR101991472B1 (ko) | 면도기 카트리지의 제조 방법 및 제조 시스템 | |
| US7748522B2 (en) | Conveyor device | |
| KR20080099471A (ko) | 분단 및 모깍기 용 인서트 | |
| US10994940B1 (en) | Apparatus for guiding containers for a conveyor | |
| RU2362645C2 (ru) | Способ придания формы поверхности металлического контейнера | |
| JP6088196B2 (ja) | グリッパ | |
| US7775381B2 (en) | Device for supporting bottles | |
| RU2384515C2 (ru) | Манипулятор для манипулирования автомобильным колесным диском в установке для обработки поверхности | |
| EP1950025A1 (en) | Plastic container with in-mould label | |
| CN111515714B (zh) | 工件保持工具 | |
| JP2015155200A (ja) | ブロー成形金型のベースの芯出しを伴うブロー成形機 | |
| JP6046247B2 (ja) | 把手付き容器の成形装置、搬送治具及び容器用把手 | |
| KR20220049162A (ko) | 밸브개폐시트 연마 자동화 장치 및 연마 방법 | |
| JP2008535673A (ja) | クランプコレット | |
| CN111301924B (zh) | 提酒器 | |
| CN114585575A (zh) | 用于容器元件翻转装置的更换系统 | |
| KR20070089842A (ko) | 금속 용기를 선택적으로 및 점진적으로 고정하기 위한 장치 | |
| FR3031918A1 (fr) | Outil pour le nettoyage de grilles de decoupe | |
| JP2016097483A (ja) | ロボットハンド、ロボット及びロボットシステム | |
| EP3086902B1 (fr) | Outil rotatif d'enlèvement de matière d'une pièce en matière plastique |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20240327 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20250428 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20250507 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20250731 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20250826 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20251107 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20251118 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20251208 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7788226 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |