JP2021189826A - 位置検出方法、位置検出装置、及びプロジェクター - Google Patents
位置検出方法、位置検出装置、及びプロジェクター Download PDFInfo
- Publication number
- JP2021189826A JP2021189826A JP2020095320A JP2020095320A JP2021189826A JP 2021189826 A JP2021189826 A JP 2021189826A JP 2020095320 A JP2020095320 A JP 2020095320A JP 2020095320 A JP2020095320 A JP 2020095320A JP 2021189826 A JP2021189826 A JP 2021189826A
- Authority
- JP
- Japan
- Prior art keywords
- image
- region
- projection surface
- indicator
- pattern
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





















Landscapes
- Projection Apparatus (AREA)
- Transforming Electric Information Into Light Information (AREA)
Abstract
【課題】プロジェクターから指示体までの距離を算出する必要なく、指示体が指示する位置を精度良く検出すること。【解決手段】所定模様を示す模様画像が投射される投射面を指示体が指示する第1状況において第1撮像装置が前記投射面を撮像することによって生成される第1画像情報と、前記模様画像に基づく第1模様画像情報と、に基づいて、前記第1画像情報が示す第1画像のうち、前記指示体が映る第1領域を特定し、前記第1状況において第2撮像装置が前記投射面を撮像することによって生成される第2画像情報と、前記第1画像情報と、に基づいて、前記第2画像情報が示す第2画像と前記第1画像との差分を表す撮像差分画像のうち、輝度値が第1閾値以下である第2領域を特定し、前記第1領域と前記第2領域とに基づいて、前記投射面のうち前記指示体が指示する位置を検出する位置検出方法。【選択図】図8
Description
本発明は、位置検出方法、位置検出装置、及びプロジェクターに関する。
近年、投射面のうち指示体が指示する位置を検出して、検出した位置に応じた処理を実行する、いわゆるインタラクティブプロジェクターが普及している。例えば、特許文献1には、投射面を撮像し、撮像した画像を示す情報に基づいてプロジェクターから指示体までの距離を算出し、算出した距離に基づいて指示体が指示する位置を検出するプロジェクターが開示されている。
しかしながら、上述した従来の位置検出方法では、プロジェクターから指示体までの距離の算出結果に大きな誤差が発生し、指示体が指示する位置を精度良く検出できない場合があった。
本発明の好適な態様に係る位置検出方法は、位置検出装置が実行する位置検出方法であって、所定模様を示す模様画像が投射される投射面を指示体が指示する第1状況において第1撮像装置が前記投射面を撮像することによって生成される第1画像情報と、前記模様画像に基づく第1模様画像情報と、に基づいて、前記第1画像情報が示す第1画像のうち、前記指示体が映る第1領域を特定し、前記第1状況において第2撮像装置が前記投射面を撮像することによって生成される第2画像情報と、前記第1画像情報と、に基づいて、前記第2画像情報が示す第2画像と前記第1画像との差分を表す撮像差分画像のうち、輝度値が第1閾値以下である第2領域を特定し、前記第1領域と前記第2領域とに基づいて、前記投射面のうち前記指示体が指示する位置を検出する。
本発明の好適な態様に係る位置検出装置は、所定模様を示す模様画像が投射される投射面を指示体が指示する第1状況において第1撮像装置が前記投射面を撮像することによって生成される第1画像情報と、前記模様画像に基づく第1模様画像情報と、に基づいて、前記第1画像情報が示す第1画像のうち、前記指示体が映る第1領域を特定する第1特定部と、前記第1状況において第2撮像装置が前記投射面を撮像することによって生成される第2画像情報と、前記第1画像情報と、に基づいて、前記第2画像情報が示す第2画像と前記第1画像との差分を表す撮像差分画像のうち、輝度値が第1閾値以下である第2領域を特定する第2特定部と、前記第1領域と前記第2領域とに基づいて、前記投射面のうち前記指示体が指示する位置を検出する検出部と、を備える。
本発明の好適な態様に係るプロジェクターは、所定模様を示す模様画像を、投射面に投射する投射装置と、前記投射面を撮像する第1撮像装置と、前記投射面を撮像する第2撮像装置と、処理装置とを備え、前記処理装置は、前記模様画像が投射される前記投射面を指示体が指示する第1状況において前記第1撮像装置が前記投射面を撮像することによって生成される第1画像情報と、前記模様画像に基づく第1模様画像情報と、に基づいて、前記第1画像情報が示す第1画像のうち、前記指示体が映る第1領域を特定する第1特定部と、前記第1状況において前記第2撮像装置が前記投射面を撮像することによって生成される第2画像情報と、前記第1画像情報と、に基づいて、前記第2画像情報が示す第2画像と前記第1画像との差分を表す撮像差分画像のうち、輝度値が第1閾値以下である第2領域を特定する第2特定部と、前記第1領域と前記第2領域とに基づいて、前記投射面のうち前記指示体が指示する位置を検出する検出部と、を備える。
本開示を実施するための形態について図面を参照して説明する。ただし、各図において、各部の寸法及び縮尺は、実際のものと適宜に異ならせてある。また、以下に述べる実施形態は、本開示の好適な具体例であるから、技術的に好ましい種々の限定が付されているが、本開示の範囲は、以下の説明において特に本開示を限定する旨の記載がない限り、これらの形態に限られるものではない。
1.第1実施形態
1.1.位置検出システム1の概要
図1は、第1実施形態に係る位置検出システム1を示す斜視図である。図1に示すように、位置検出システム1は、プロジェクター10と、位置検出装置80とを有する。プロジェクター10は、いわゆる短焦点のプロジェクターであり、投射面SCとなる壁面に設置されている。図1に示す投射面SCは、例えば、幕又は壁面等により構成される。なお、投射面SCの形状は、図1に示す例では平面形状であるが、湾曲形状であってもよい。更に、投射面SCには、吸着パッド及びマグネットシート等の突起物が張り付いていてもよい。以下の説明では、特に記載のない限り、投射面SCの形状は平面形状であり、且つ、投射面SCには突起物が張り付いていないことを前提とする。
1.1.位置検出システム1の概要
図1は、第1実施形態に係る位置検出システム1を示す斜視図である。図1に示すように、位置検出システム1は、プロジェクター10と、位置検出装置80とを有する。プロジェクター10は、いわゆる短焦点のプロジェクターであり、投射面SCとなる壁面に設置されている。図1に示す投射面SCは、例えば、幕又は壁面等により構成される。なお、投射面SCの形状は、図1に示す例では平面形状であるが、湾曲形状であってもよい。更に、投射面SCには、吸着パッド及びマグネットシート等の突起物が張り付いていてもよい。以下の説明では、特に記載のない限り、投射面SCの形状は平面形状であり、且つ、投射面SCには突起物が張り付いていないことを前提とする。
図1では、投射面SCをXY平面とし、投射面SCの法線方向を+Z方向として示してある。更に、+Z方向の反対方向を−Z方向であるとして説明する。更に、Z軸方向が、+Z方向及び−Z方向の総称であるとして説明する。また、重力方向が+Y方向であり、+Y方向の反対方向を−Y方向であるとして説明する。更に、Y軸方向が、+Y方向及び−Y方向の総称であるとして説明する。また、+Z方向から見て、+Y方向を反時計回りに90度回転した方向を、+X方向とし、+X方向の反対方向を−X方向として説明する。更に、X軸方向が、+X方向及び−X方向の総称であるとして説明する。
プロジェクター10はいわゆるインタラクティブプロジェクターであり、指示体の位置に応じた処理を行う。指示体は、投射面SC内のいずれかの位置を指示する。図1の例では、指示体は、ユーザーUの指Fである。また、指示体はユーザーUの指Fに限らず、ユーザーUが手に持って使用するペン型のデバイスでもよい。位置検出装置80は、指示体が指示する位置を検出する。例えば、位置検出装置80は、プロジェクター10の+Y方向の端部に取り付けられている。
プロジェクター10は、投射面SCに画像光を投影することにより、投射面SCに画像Gを表示する。画像光は、ユーザーUが視認できる可視光である。図1に示す例では、プロジェクター10は、投射面SCに対して、−Y方向を基準に+Z方向に傾いた斜めの方向に配置される。従って、プロジェクター10は、+Y方向を基準に−Z方向に傾いた斜めの方向に向けて、画像光を射出する。
図1に例示するように、プロジェクター10は、不図示のパーソナルコンピューターからの画像情報に基づく画像Gを投射面SCに表示可能である。また、位置検出装置80は、指Fが指示する投射面SC上の位置を検出し、位置を示す位置情報をプロジェクター10に送信する。プロジェクター10は、当該位置の軌跡に沿う描画画像GDを投射面SCに表示可能である。ここで、プロジェクター10は、指Fの指示によりプロジェクター10に各種の機能を実行させるためのGUI(Graphical User Interface)用の画像であるツールバーGTを投射面SCに表示する。
1.2.位置検出システム1の構成
図2は、位置検出システム1の構成を示す図である。プロジェクター10は、処理装置12と、記憶装置14と、可視光投射装置16と、第1撮像装置18−1と、第2撮像装置18−2と、通信装置20とを有する。プロジェクター10の各要素は、情報を通信するためのバス21で相互に接続される。
図2は、位置検出システム1の構成を示す図である。プロジェクター10は、処理装置12と、記憶装置14と、可視光投射装置16と、第1撮像装置18−1と、第2撮像装置18−2と、通信装置20とを有する。プロジェクター10の各要素は、情報を通信するためのバス21で相互に接続される。
処理装置12は、CPU(Central Processing Unit)等のコンピューターである。なお、処理装置12は、1又は複数のプロセッサーによって構成されてもよい。
記憶装置14は、磁気的記憶装置又はフラッシュROM(Read only memory)等で構成される。記憶装置14は、処理装置12が読取可能な記録媒体であり、処理装置12が実行する制御プログラムを含む複数のプログラム、及び、処理装置12が使用する各種の情報などを記憶する。
可視光投射装置16は、可視光の画像Gを投射面SCに投射する。可視光投射装置16の構成について、図3を用いて説明する。
図3は、可視光投射装置16の一例を示す図である。可視光投射装置16は、可視光光源161と、光変調装置の一例である3つの液晶ライトバルブ162R、162G、及び162Bと、投射光学系の一例である投射レンズ163と、ライトバルブ駆動部164等を含む。可視光投射装置16は、可視光光源161から射出される可視光を液晶ライトバルブ162で変調して画像を形成し、画像Gを投射レンズ163から拡大投射する。画像Gは、投射面SCに表示される。
可視光光源161は、キセノンランプ、超高圧水銀ランプ、LED(Light Emitting Diode)、又はレーザー光源等から形成される光源部161aと、光源部161aが放射する可視光の方向のばらつきを低減するリフレクター161bとを含む。可視光光源161から射出される可視光は、不図示のインテグレーター光学系によって輝度分布のばらつきが低減され、その後、不図示の色分離光学系によって光の3原色である赤色、緑色、青色の色光成分に分離される。赤色、緑色、青色の色光成分は、それぞれ液晶ライトバルブ162R、162G、及び162Bに入射する。
液晶ライトバルブ162は、一対の透明基板間に液晶が封入される液晶パネル等によって構成される。液晶ライトバルブ162には、マトリクス状に配列される複数の画素162pからなる矩形の画素領域162aが形成されている。液晶ライトバルブ162では、液晶に対して画素162pごとに駆動電圧を印加することが可能である。ライトバルブ駆動部164が、投射面SCに投射する画像を示す画像情報に応じた駆動電圧を各画素162pに印加すると、各画素162pは、画像情報に応じた光透過率に設定される。このため、可視光光源161から射出される可視光は、画素領域162aを透過することで変調され、投射面SCに投射する画像情報に応じた画像Gが色光ごとに形成される。
説明を図2に戻す。第1撮像装置18−1及び第2撮像装置18−2は、投射面SCを撮像する。第1撮像装置18−1及び第2撮像装置18−2は、撮像した画像に視差を発生させるため、X軸方向に沿って互いに離れた位置に配置される。更に、第1撮像装置18−1及び第2撮像装置18−2は、撮像光学系182、可視光透過フィルター184、赤外光透過フィルター186、及び、撮像素子188を有する。
撮像光学系182は、少なくとも1つの撮像レンズを含む光学系であり、プリズム等の各種の光学素子を備えてもよいし、ズームレンズやフォーカスレンズ等を備えてもよい。撮像光学系182は、投射面SCを撮像素子188により撮像することが容易であるという観点から、広角レンズ又は魚眼レンズを含んで構成されることが好ましい。
可視光透過フィルター184及び赤外光透過フィルター186は、撮像光学系182と撮像素子188との間の光路上に配置される状態と当該光路上から退避する状態とを切替可能に構成される。可視光の画像を撮像素子188により撮像する場合、赤外光透過フィルター186が当該光路上から退避する状態となり、当該光路上には、可視光透過フィルター184が配置される。赤外光の画像を撮像素子188により撮像する場合、可視光透過フィルター184が当該光路上から退避する状態となり、当該光路上には、赤外光透過フィルター186が配置される。
撮像素子188は、例えば、CCD(Charge Coupled Device)イメージセンサー又はCMOS(Complementary MOS)イメージセンサー等で構成される。撮像素子188は、撮像光学系182、及び、可視光透過フィルター184及び赤外光透過フィルター186の一方を介して撮像し、撮像した画像を示す情報を出力する。赤外光透過フィルター186を介して撮像した画像を示す情報は、輝度値のみが示されたグレースケール画像である。
通信装置20は、位置検出装置80と通信を行うためのハードウェアである。通信装置20は、例えば、通信端子である。
位置検出装置80は、処理装置82と、赤外光投射装置84と、記憶装置86と、通信装置90とを有する。位置検出装置80の各要素は、情報を通信するためのバス91で相互に接続される。
処理装置82は、CPU等のコンピューターである。なお、処理装置82は、1又は複数のプロセッサーによって構成されてもよい。
赤外光投射装置84は、赤外光の画像を投射面SCに投射する。赤外光投射装置84の構成について、図4を用いて説明する。
図4は、赤外光投射装置84の一例を示す図である。赤外光投射装置84は、赤外光源841と、光変調装置の一例である液晶ライトバルブ842と、投射光学系の一例である投射レンズ843と、ライトバルブ駆動部844等を含む。赤外光投射装置84は、赤外光源841から射出される赤外光を液晶ライトバルブ842で変調して赤外画像を形成し、赤外画像を投射レンズ843から拡大投射する。赤外画像は、投射面SCに投射される。
なお、赤外光投射装置84は、液晶ライトバルブ842を有さない態様でもよい。例えば、赤外光投射装置84は、赤外のレーザーによるパターンにより赤外光の画像を形成してもよいし、赤外のレーザーと回折格子とによって赤外光の画像を形成してもよい。
なお、赤外光投射装置84は、液晶ライトバルブ842を有さない態様でもよい。例えば、赤外光投射装置84は、赤外のレーザーによるパターンにより赤外光の画像を形成してもよいし、赤外のレーザーと回折格子とによって赤外光の画像を形成してもよい。
赤外光源841は、キセノンランプ、超高圧水銀ランプ、LED、又はレーザー光源等から形成される光源部841aと、光源部841aが放射する赤外光の方向のばらつきを低減するリフレクター841bとを含む。赤外光源841から射出される赤外光は、不図示のインテグレーター光学系によって輝度分布のばらつきが低減される。ばらつきが低減された赤外光は、液晶ライトバルブ842に入射する。
液晶ライトバルブ842は、一対の透明基板間に液晶が封入される液晶パネル等によって構成される。液晶ライトバルブ842には、マトリクス状に配列される複数の画素842pからなる矩形の画素領域842aが形成されている。液晶ライトバルブ842では、液晶に対して画素842pごとに駆動電圧を印加することが可能である。ライトバルブ駆動部844が、投射面SCに投射する画像を示す画像情報に応じた駆動電圧を各画素842pに印加すると、各画素842pは、画像情報に応じた光透過率に設定される。このため、赤外光源841から射出される赤外光は、画素領域842aを透過することで変調され、投射面SCに投射する画像情報に応じた赤外光の画像が形成される。本実施形態では、画素領域842aを有する平面をxy平面として説明する。+X方向に対応する方向を+x方向とし、−X方向に対応する方向を−x方向として説明する。更に、x軸方向が、+x方向及び−x方向の総称であるとして説明する。同様に、+Y方向に対応する方向を+y方向とし、−Y方向に対応する方向を−y方向として説明する。更に、y軸方向が、+y方向及び−y方向の総称であるとして説明する。
説明を図2に戻す。記憶装置86は、磁気的記憶装置又はフラッシュROM等で構成される。記憶装置86は、処理装置82が読取可能な記録媒体であり、処理装置82が実行する制御プログラムを含む複数のプログラム、原本模様画像情報BGI、第1模様画像情報C1−BGI、第2模様画像情報C2−BGI、第1座標変換テーブルLT1、第2座標変換テーブルLT2、及び、処理装置82が使用する各種の情報などを記憶する。原本模様画像情報BGIは、所定模様を示す模様画像BGを示す。模様画像BGは、指Fが指示する位置を検出するために使用される。模様画像BGは、画素間で輝度値の異なる赤外光を用いた画像である。輝度値は、各画素の明るさを示す数値である。輝度値は、各画素の色の濃淡及び明るさを示す画素値から求めることができる。ただし、赤外光を用いた画像は、無彩色の画像である。赤外光を用いた画像では、画素値を輝度値として扱うことができる。模様画像BGが画素領域842aに表示される場合、模様画像BGは、各画素842pによって輝度値が互いに異なる赤外光の画像として画素領域842aに表示される。模様画像BGが投射面SCに投射されても、ユーザーUには視認できない。模様画像BGは、例えば、図5〜図8に示す3つの態様がある。また、図5〜図8では、輝度値が高い赤外光を白色とし、輝度値が低い赤外光を黒色として示す。
図5は、第1の態様における模様画像BGを示す。第1の態様における模様画像BGが示す所定模様は、縞模様である。第1態様における模様画像BGは、輝度値の異なる2色を用いた複数の平行する線により構成される。第1の態様における模様画像BGが画素領域842aに表示される場合、第1の態様における模様画像BGは、x軸方向に沿った縞模様である。第1の態様における模様画像BGは、x軸方向に沿った縞模様に限らず、y軸方向に沿った縞模様でもよいし、x軸方向及びy軸方向に交差する方向に沿った縞模様でもよい。複数の平行する線の間隔d1は、投射面SCに投射された場合に指示体より狭く、第1撮像装置18−1及び第2撮像装置18−2の分解能によって平行する線が識別できる程度に広いことが好ましい。間隔d1は、例えば、投射面SCに投射された場合8mm程度になる幅である。
図6は、第2の態様における模様画像BGを示す。第2の態様における模様画像BGが示す所定模様は、水玉模様である。水玉模様は、ドットを複数配置した模様である。図6に例示する模様画像BGは、輝度値が低い赤外光によりドットが形成されているが、輝度値が低い赤外光によりドットが形成されてもよい。また、図6に例示する模様画像BGは、x軸方向及びy軸方向に沿ってドットが配置された模様であるが、x軸方向と、x軸方向及びy軸方向に交差する方向とに沿ってドットが配置された模様でもよい。ドットの間隔d2は、間隔d1と同様に、投射面SCに投射された場合に指Fより狭く、第1撮像装置18−1及び第2撮像装置18−2の分解能によって複数のドットが識別できる程度に広いことが好ましい。
図7は、第3の模様における模様画像BGを示す。第3の模様における模様画像BGが示す所定模様は、モザイク模様である。モザイク模様は、独立した図形を複数配置した模様である。図7に例示する模様画像BGは、複数の矩形をランダムに配置した模様である。矩形の大きさd3は、間隔d1及び間隔d2と同様に、投射面SCに投射された場合に指Fより小さく、第1撮像装置18−1及び第2撮像装置18−2の分解能によって複数の矩形が識別できる程度に大きいことが好ましい。
以下では、模様画像BGは、第1の態様であるとして説明する。
説明を図2に戻す。第1模様画像情報C1−BGIは、模様画像BGが投射面SCに投射されており、且つ、投射面SCと第1撮像装置18−1との間に指示体が存在しない状況において第1撮像装置18−1が投射面SCを撮像することによって生成される情報である。以下、投射面SCと第1撮像装置18−1との間に指示体が存在しない状況を、「キャリブレーション状況」と称する。キャリブレーション状況は、「第2状況」の一例である。第2模様画像情報C2−BGIは、投射面SCと第2撮像装置18−2との間に指示体が存在しない状況において第2撮像装置18−2が投射面SCを撮像することによって生成される情報である。
第1座標変換テーブルLT1は、第1撮像装置18−1の座標系と、投射面SCのXY座標系とを変換するテーブルである。第2座標変換テーブルLT2は、第2撮像装置18−2の座標系と、投射面SCのXY座標系とを変換するテーブルである。
通信装置90は、プロジェクター10と通信を行うためのハードウェアである。通信装置90は、例えば、通信端子である。通信装置20と通信装置90とが接触している場合、位置検出装置80は、プロジェクター10と通信を行うことができる。
1.3.位置検出システム1の機能
図8は、位置検出システム1の機能を示す図である。処理装置12は、記憶装置14から制御プログラムを読み出し、この制御プログラムを実行することによって、画像処理部122、インタラクティブ処理部124、及び、撮像処理部126として機能する。処理装置82は、記憶装置86から制御プログラムを読み出し、この制御プログラムを実行することによって、第1特定部822、第2特定部824、及び、検出部826として機能する。位置検出システム1は、指Fが指示する位置を検出するため、キャリブレーションモードと、通常モードとを有する。
図8は、位置検出システム1の機能を示す図である。処理装置12は、記憶装置14から制御プログラムを読み出し、この制御プログラムを実行することによって、画像処理部122、インタラクティブ処理部124、及び、撮像処理部126として機能する。処理装置82は、記憶装置86から制御プログラムを読み出し、この制御プログラムを実行することによって、第1特定部822、第2特定部824、及び、検出部826として機能する。位置検出システム1は、指Fが指示する位置を検出するため、キャリブレーションモードと、通常モードとを有する。
キャリブレーションモードは、第1撮像装置18−1及び第2撮像装置18−2の調整を行うモードである。通常モードは、パーソナルコンピューターからの画像情報に基づく画像Gを投射面SCに表示するモードである。更に、通常モードでは、プロジェクター10は、指示体が指示する位置に応じた処理を行う。通常モードにおける位置検出システム1は、模様画像BGが投射される投射面SCを指示体が指示する状況にある。以下、模様画像BGが投射される投射面SCを指示体が指示する状況を、「通常状況」と称する。通常状況は、「第1状況」の一例である。
1.3.1.キャリブレーションモードにおける位置検出システム1の機能
キャリブレーションモードにおいて、処理装置12は、画像処理部122、及び、撮像処理部126として機能する。画像処理部122は、画像情報に対して画像処理を施して、投射面SCに投射させる画像を示す画像情報を生成する。キャリブレーションモードにおいて、画像処理部122は、キャリブレーション画像CLを示す画像情報に対して画像処理を施して、投射面SCに投射させる画像を示す画像情報を生成する。画像処理部122は、生成した画像情報を、可視光投射装置16に出力する。可視光投射装置16は、画像処理部122が生成した画像情報が示す画像を投射する。更に、画像処理部122は、可視光を透過した状態により投射面SCを撮像する指示を、撮像処理部126に通知する。
キャリブレーションモードにおいて、処理装置12は、画像処理部122、及び、撮像処理部126として機能する。画像処理部122は、画像情報に対して画像処理を施して、投射面SCに投射させる画像を示す画像情報を生成する。キャリブレーションモードにおいて、画像処理部122は、キャリブレーション画像CLを示す画像情報に対して画像処理を施して、投射面SCに投射させる画像を示す画像情報を生成する。画像処理部122は、生成した画像情報を、可視光投射装置16に出力する。可視光投射装置16は、画像処理部122が生成した画像情報が示す画像を投射する。更に、画像処理部122は、可視光を透過した状態により投射面SCを撮像する指示を、撮像処理部126に通知する。
図9は、キャリブレーション画像CLの一例を示す図である。図9に例示するキャリブレーション画像CLの模様は、水玉模様である。
説明を図8に戻す。画像処理部122から前述の指示を受け付けた場合、撮像処理部126は、第1撮像装置18−1及び第2撮像装置18−2の各々に、撮像光学系182と撮像素子188との間の光路上に可視光透過フィルター184を配置する指示を通知する。可視光透過フィルター184の配置後、撮像処理部126は、第1撮像装置18−1及び第2撮像装置18−2の各々に、投射面SCを撮像する指示を通知する。
図10は、キャリブレーションモードにおいて第1撮像装置18−1が撮像した画像CL1を示す図である。図11は、キャリブレーションモードにおいて第2撮像装置18−2が撮像した画像CL2を示す図である。第1撮像装置18−1及び第2撮像装置18−2は、X軸方向に沿って互いに離れた位置に配置されているため、画像CL1及び画像CL2には、視差が発生する。
撮像処理部126は、画像CL1を示す情報を第1撮像装置18−1から取得する。撮像処理部126は、画像CL1を示す情報における各ドットの重心座標と、キャリブレーション画像CLにおける各ドットの重心座標とを対応付けることにより、第1座標変換テーブルLT1を生成する。画像CL1を示す情報における各ドットの重心座標は、第1撮像装置18−1の座標系に属する。キャリブレーション画像CLにおける各ドットの重心座標は、投射面SCのXY座標系に属する。例えば、撮像処理部126は、キャリブレーション画像CLに含まれるドットdtの重心座標と、画像CL1に含まれるドットdt1の重心座標とを対応付けたレコードを生成し、生成したレコードを第1座標変換テーブルLT1に格納する。更に、撮像処理部126は、第1撮像装置18−1の座標系のうち、画像CL1を示す情報における各ドットの重心座標以外の座標の変換座標を、当該座標の周辺に位置する4つのドットからのバイリニア補間により算出する。
撮像処理部126は、生成した第1座標変換テーブルLT1を、位置検出装置80に送信する。第1座標変換テーブルLT1を受信した位置検出装置80は、第1座標変換テーブルLT1を記憶装置86に記憶させる。同様に、撮像処理部126は、画像CL2を示す情報を第2撮像装置18−2から取得する。第1座標変換テーブルLT1と同様の方法により、撮像処理部126は、第2座標変換テーブルLT2を生成する。撮像処理部126は、生成した第2座標変換テーブルLT2を、位置検出装置80に送信する。第2座標変換テーブルLT2を受信した位置検出装置80は、第2座標変換テーブルLT2を記憶装置86に記憶させる。
第1座標変換テーブルLT1及び第2座標変換テーブルLT2を生成した後、撮像処理部126は、位置検出装置80に模様画像BGを投射する指示を通知する。赤外光投射装置84は、模様画像BGを投射面SCに投射する。更に、撮像処理部126は、第1撮像装置18−1及び第2撮像装置18−2の各々に、撮像光学系182と撮像素子188との間の光路上に赤外光透過フィルター186を配置する指示を通知する。赤外光透過フィルター186の配置後、撮像処理部126は、第1撮像装置18−1及び第2撮像装置18−2の各々に、投射面SCを撮像する指示を通知する。
撮像処理部126からの指示を受け付けた場合、第1撮像装置18−1は、投射面SCを撮像する。第1撮像装置18−1が撮像する場合の状況は、模様画像BGが投射面SCに投射されており、且つ、投射面SCと第1撮像装置18−1との間に指示体が存在しない状況である。
図12は、第1模様撮像画像C1−BGの一例を示す。本実施形態では、投射面SCが平面形状であるため、模様画像BGと、第1模様撮像画像C1−BGとが略同一である。但し、投射面SCが湾曲形状である、又は、投射面SCに突起物が張り付いている場合には、模様画像BGと、第1模様撮像画像C1−BGとには、差異が生じる。
撮像処理部126は、第1模様画像情報C1−BGIを第1撮像装置18−1から取得する。第1模様画像情報C1−BGIと同様に、第2撮像装置18−2は、第2模様画像情報C2−BGIを生成する。第2模様画像情報C2−BGIが示す第2模様撮像画像C2−BGも、第1模様撮像画像C1−BGと同様に、輝度値のみが示されたグレースケール画像である。撮像処理部126は、第2模様画像情報C2−BGIを第2撮像装置18−2から取得する。撮像処理部126は、第1模様画像情報C1−BGI及び第2模様画像情報C2−BGIを、位置検出装置80に送信する。第1模様画像情報C1−BGIを受信した位置検出装置80は、第1模様画像情報C1−BGIを、第1座標変換テーブルLT1を用いて投射面SCのXY座標系に変換し、変換した第1模様画像情報C1−BGIを記憶装置86に記憶する。第2模様画像情報C2−BGIを受信した位置検出装置80は、第2模様画像情報C2−BGIを、第2座標変換テーブルLT2を用いて投射面SCのXY座標系に変換し、変換した第2模様画像情報C2−BGIを記憶装置86に記憶する。
1.3.2.通常モードにおける位置検出システム1の機能
通常モードにおいて、処理装置82は、第1特定部822、第2特定部824、及び、検出部826として機能する。通常モードにおいて、赤外光投射装置84は、模様画像BGを投射し続ける。通常モードにおいて、処理装置12は、画像処理部122、インタラクティブ処理部124、及び、撮像処理部126として機能する。通常モードにおいて、画像処理部122は、パーソナルコンピューターから受信した画像情報VIに対して画像処理を施して、投射面SCに投射させる画像Gを示す画像情報を生成する。画像処理部122は、生成した画像情報を、可視光投射装置16に出力する。可視光投射装置16は、画像処理部122が生成した画像情報が示す画像Gを投射する。画像処理部122は、赤外光を透過した状態により投射面SCを撮像する指示を撮像処理部126に通知する。
通常モードにおいて、処理装置82は、第1特定部822、第2特定部824、及び、検出部826として機能する。通常モードにおいて、赤外光投射装置84は、模様画像BGを投射し続ける。通常モードにおいて、処理装置12は、画像処理部122、インタラクティブ処理部124、及び、撮像処理部126として機能する。通常モードにおいて、画像処理部122は、パーソナルコンピューターから受信した画像情報VIに対して画像処理を施して、投射面SCに投射させる画像Gを示す画像情報を生成する。画像処理部122は、生成した画像情報を、可視光投射装置16に出力する。可視光投射装置16は、画像処理部122が生成した画像情報が示す画像Gを投射する。画像処理部122は、赤外光を透過した状態により投射面SCを撮像する指示を撮像処理部126に通知する。
撮像処理部126は、第1撮像装置18−1及び第2撮像装置18−2の各々に、撮像光学系182と撮像素子188との間の光路上に赤外光透過フィルター186を配置する指示を通知する。赤外光透過フィルター186の配置後、撮像処理部126は、第1撮像装置18−1及び第2撮像装置18−2の各々に、投射面SCを撮像する指示を通知する。通常状況において、第1撮像装置18−1が投射面SCを撮像することによって、第1撮像装置18−1は、第1画像C1を示す第1画像情報C1Iを生成する。第1撮像装置18−1と同様に、通常状況において、第2撮像装置18−2が投射面SCを撮像することによって、第2撮像装置18−2は、第2画像C2を示す第2画像情報C2Iを生成する。処理装置12は、通信装置20を用いて、第1画像情報C1I及び第2画像情報C2Iを位置検出装置80に送信する。処理装置82は、第1座標変換テーブルLT1を用いて第1画像情報C1Iを、投射面SCのXY座標系に変換する。同様に、処理装置82は、第2座標変換テーブルLT2を用いて第2画像情報C2Iを、投射面SCのXY座標系に変換する。以下に示す画像は、全て投射面SCのXY座標系であるとして説明する。
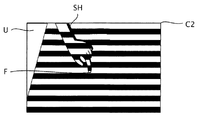
図13は、第1画像C1の一例を示す図である。第1画像C1には、ユーザーUの一部の画像と、指Fの画像と、ユーザーUによる影SHの画像とが含まれる。模様画像BGの一部は、ユーザーUに投射されるため、投射面SCに投射される場合と比較して変化する。影SHは、ユーザーUによって赤外光が遮られた結果生じる。影SHでは、模様画像BGの一部が失われる。
図14は、第2画像C2の一例を示す図である。第2画像C2には、ユーザーUの一部の画像と、指Fの画像と、ユーザーUによる影SHの画像とが含まれる。第2画像C2は、第1画像C1と比較して、ユーザーUが映りこむ領域が狭い。更に、第2画像C2は、第1画像C1と比較して、ユーザーUによる影SHの領域が狭い。
第1特定部822は、第1画像情報C1Iと、第1模様画像情報C1−BGIと、第2画像情報C2Iと、第2模様画像情報C2−BGIとに基づいて、第1画像C1のうち、指示体が映る領域を特定する。第1画像C1のうち指示体が映る領域を、「指示体領域」と称する。指示体領域は、「第1領域」の一例である。より詳細な指示体領域の特定方法について、図15を用いて説明する。
図15は、指示体領域の特定例を示す図である。第1特定部822は、差分領域特定部8222と、影領域特定部8224と、指示体領域特定部8226とを有する。
差分領域特定部8222は、第1模様画像情報C1−BGIが示す第1模様撮像画像C1−BGと第1画像C1との差分を表す差分画像C1’を示す情報を生成する。差分画像C1’は、「第1差分画像」の一例である。具体的には、第1特定部822は、第1模様撮像画像C1−BGの各画素の画素値と第1画像C1の各画素の画素値との差分の絶対値が所定の閾値以上である画素を検出することにより、差分の絶対値が所定の閾値以上である領域を特定する。第1画像C1のうち、差分の絶対値が所定の閾値以上である領域を、以下、「第1差分領域」と称する。所定の閾値は、例えば、最大画素値の10%である。最大画素値は、第1画像C1が8ビットの画像の場合、255である。同様に、差分領域特定部8222は、第2模様画像情報C2−BGIが示す第2模様撮像画像C2−BGと第2画像C2との差分を表す差分画像C2’を示す情報を生成する。差分画像C2’は、「第2差分画像」の一例である。第2画像C2のうち、差分の絶対値が所定の閾値以上である領域を、以下、「第2差分領域」と称する。図15の例示において、差分画像C1’のうち、白色の領域が、第1差分領域である。差分画像C2’のうち、白色の領域が、第2差分領域である。
影領域特定部8224は、第1画像C1のうち、所定模様である縞模様を有さない領域を、指示体の影が映る領域として特定する。以下、第1画像C1のうち、指示体の影が映る領域を、「第1影領域」と称する。第1影領域は、「第3領域」の一例である。影領域特定部8224は、第1影領域を表す第1影領域画像C1−Sを示す情報を生成する。より具体的には、影領域特定部8224は、第1画像C1のうち輝度値の変化が小さい領域から、縞模様を有さない第1影領域を検出する。輝度値の変化が小さい領域の特定方法として、影領域特定部8224は、例えば、第1画像C1の各画素のうち、各画素の所定範囲内に含まれる複数の画素の輝度値のばらつき値が所定の閾値以下である画素を、輝度値の変化が小さい画素として特定する。所定範囲は、指Fの幅がはみ出さずに映る程度の幅である。所定範囲の大きさは、第1座標変換テーブルLT1により変換された第1画像C1の解像度の大きさの増加に応じて増加する。例えば、所定範囲の大きさは、5画素×5画素の領域である。
第1画像C1と同様に、影領域特定部8224は、第2画像C2のうち、所定模様である縞模様を有さない領域を、指示体の影が映る領域として特定する。以下、第2画像C2のうち、指示体の影が映る領域を、「第2影領域」と称する。第2影領域は、「第5領域」の一例である。影領域特定部8224は、第2影領域を表す第2影領域画像C2−Sを示す情報を生成する。図15の例示において、第1影領域画像C1−Sのうち、白色の領域が、第1影領域である。同様に、第2影領域画像C2−Sのうち、白色の領域が、第2影領域である。
指示体領域特定部8226は、差分画像C1’が示す第1差分領域から、第1影領域画像C1−Sが示す第1影領域を除いた領域を特定する。以下、第1差分領域から第1影領域を除いた領域を、「第1指示体領域」と称する。第1指示体領域は、「第4領域」の一例である。指示体領域特定部8226は、第1指示体領域を表す第1指示体領域画像C1’’を示す情報を生成する。同様に、指示体領域特定部8226は、差分画像C2’が示す第2差分領域から、第2影領域画像C2−Sが示す第2影領域を除いた領域を特定する。以下、第2差分領域から第2影領域を除いた領域を、「第2指示体領域」と称する。第2指示体領域は、「第6領域」の一例である。指示体領域特定部8226は、第2指示体領域を表す第2指示体領域画像C2’’を示す情報を生成する。図15の例示において、第1指示体領域画像C1’’のうち、白色の領域が、第1指示体領域である。同様に、第2指示体領域画像C2’’のうち、白色の領域が、第2指示体領域である。
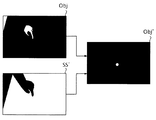
指示体領域特定部8226は、第1指示体領域画像C1’’が表す第1指示体領域と、第2指示体領域画像C2’’が表す第2指示体領域とが互いに重なる領域を、指示体領域として特定する。指示体領域特定部8226は、指示体領域を表す指示体領域画像Objを示す指示体領域画像情報ObjIを生成する。
説明を図8に戻す。第2特定部824は、第2画像情報C2Iと、第1画像情報C1Iとに基づいて、第2画像C2と第1画像C1との差分の絶対値を表す差分画像SSのうち、輝度値が第1閾値以下である領域を特定する。この差分画像のうち、輝度値が第1閾値以下である領域を、「投射面近傍領域」と称する。第1閾値は、例えば、最大画素値の20%である。投射面近傍領域には、投射面SCのうち、第1撮像装置18−1及び第2撮像装置18−2から見て指示体等の物体によって遮られない領域と、第1撮像装置18−1及び第2撮像装置18−2から見て、投射面SCの近傍にある指示体の一部とが含まれる。第2画像C2と第1画像C1との差分を表す差分画像SSは、「撮像差分画像」の一例である。投射面近傍領域は、「第2領域」の一例である。
図16は、投射面近傍領域の特定例を示す図である。第2特定部824は、第2画像情報C2Iが示す第2画像C2と、第1画像情報C1Iが示す第1画像C1との差分の絶対値を表す差分画像SSを示す情報を生成する。続けて、第2特定部824は、差分画像SSのうち、輝度値が第1閾値以下である領域を表す投射面近傍画像SS’を示す投射面近傍画像情報SS’Iを生成する。
説明を図8に戻す。検出部826は、指示体領域画像Objが表す指示体領域と、投射面近傍画像SS’が表す投射面近傍領域とに基づいて、投射面SCのうち指示体が指示する位置を検出する。図17を用いて、指示体が指示する位置の検出例について説明する。
図17は、指示体が指示する位置の検出例を示す図である。検出部826は、指示体領域と投射面近傍領域とが重なるタッチ領域を特定する。より詳細には、検出部826は、タッチ領域を表すタッチ領域画像Obj’を示す情報を生成する。タッチ領域は、投射面近傍であって、且つ、指示体が存在する領域である。図17の例示では、タッチ領域画像Obj’のうち、白色の領域がタッチ領域である。
タッチ領域画像Obj’を示す情報の生成後、検出部826は、タッチ領域の重心座標を、指示体が指示する位置として検出する。検出部826は、検出した位置を示す位置情報LIを、通信装置90を用いてプロジェクター10に送信する。
説明を図8に戻す。インタラクティブ処理部124は、位置情報LIが示す位置に応じた処理を実行する。例えば、インタラクティブ処理部124は、図1の例示のように、位置情報LIが示す位置に応じた軌跡に沿う描画画像GDを示す画像情報を生成する。
画像処理部122は、インタラクティブ処理部124が生成した画像情報が示す描画画像GDと、画像情報VIが示す画像とを重畳した画像を示す画像情報を生成する。更に、画像処理部122は、生成した画像情報に対して画像処理を施して、投射面SCに投射させる画像を示す画像情報を生成する。可視光投射装置16は、描画画像GDと、画像情報VIが示す画像とを重畳した画像とを投射する。
1.4.位置検出システム1の動作
通常モードにおける位置検出システム1の動作を、図18から図21までを用いて説明する。
通常モードにおける位置検出システム1の動作を、図18から図21までを用いて説明する。
図18は、位置検出システム1の動作を示すフローチャートである。ステップS1において、赤外光投射装置84は、模様画像BGの投射を開始する。ステップS11において、模様画像BGが投射された状態で、可視光投射装置16は、画像Gを投射する。ステップS13において、第1撮像装置18−1が投射面SCを撮像することによって、第1撮像装置18−1は、第1画像情報C1Iを生成する。同様に、ステップS15において、第2撮像装置18−2は、投射面SCを撮像することによって、第2画像情報C2Iを生成する。ステップS17において、処理装置12は、通信装置20を用いて、第1画像情報C1Iと第2画像情報C2Iとを位置検出装置80に送信する。
第1画像情報C1Iを受け付けた場合、処理装置82は、ステップS21において、第1座標変換テーブルLT1を用いて、第1画像情報C1Iを変換する。第1画像情報C1Iを受け付けた場合、処理装置82は、ステップS23において、第2座標変換テーブルLT2を用いて、第2画像情報C2Iを変換する。ステップS23の処理終了後、処理装置82は、ステップS25において、変換後の第1画像情報C1I及び変換後の第2画像情報C2Iを用いて指示体領域特定処理を実行する。ステップS25の処理が、第1特定部822に相当する。
図19は、指示体領域特定処理を示すフローチャートである。指示体領域特定処理は、指示体領域を特定する処理である。処理装置82は、ステップS51において、第1模様画像情報C1−BGIと第1画像情報C1Iとに基づいて、第1模様撮像画像C1−BGと第1画像C1との差分を表す差分画像C1’を示す情報を生成する。同様に、処理装置82は、ステップS53において、第2模様画像情報C2−BGIと第2画像情報C2Iとに基づいて、第2模様撮像画像C2−BGと第2画像C2との差分を表す差分画像C2’を示す情報を生成する。
また、処理装置82は、ステップS55において、第1画像情報C1Iに基づいて、第1影領域画像C1−Sを示す情報を生成する。同様に、処理装置82は、ステップS57において、第2画像情報C2Iに基づいて、第2影領域画像C2−Sを示す情報を生成する。
ステップS51及びステップS55の処理終了後、処理装置82は、ステップS59において、差分画像C1’を示す情報と、第1影領域画像C1−Sを示す情報とに基づいて、第1指示体領域画像C1’’を示す情報を生成する。ステップS53及びステップS57の処理終了後、処理装置82は、ステップS61において、差分画像C2’を示す情報と、第2影領域画像C2−Sを示す情報とに基づいて、第2指示体領域画像C2’’を示す情報を生成する。
ステップS59及びステップS61の処理終了後、処理装置82は、ステップS63において、第1指示体領域画像C1’’を示す情報と、第2指示体領域画像C2’’を示す情報とに基づいて、指示体領域画像Objを示す指示体領域画像情報ObjIを生成する。ステップS63の処理終了後、処理装置82は、図19に示す一連の処理を終了し、ステップS27の処理を実行する。
説明を図18に戻す。処理装置82は、ステップS27において、投射面近傍領域特定処理を実行する。ステップS27の処理が、第2特定部824に相当する。図20を用いて、投射面近傍領域特定処理を説明する。
図20は、投射面近傍領域特定処理を示すフローチャートである。投射面近傍領域特定処理は、投射面近傍領域を特定する処理である。処理装置82は、ステップS71において、第2画像情報C2Iと、第1画像情報C1Iとに基づいて、第2画像C2と第1画像C1との差分の絶対値を表す差分画像SSを示す情報を生成する。次に、ステップS73において、処理装置82は、差分画像SSを示す情報に基づいて、差分画像SSのうち、輝度値が第1閾値以下である領域を表す投射面近傍画像SS’を示す投射面近傍画像情報SS’Iを生成する。ステップS73の処理終了後、処理装置82は、図20に示す一連の処理を終了し、ステップS29の処理を実行する。
説明を図18に戻す。処理装置82は、ステップS29において、位置情報検出処理を実行する。ステップS29の処理が、検出部826に相当する。図21を用いて、位置情報検出処理を説明する。
図21は、位置情報検出処理を示すフローチャートである。処理装置82は、ステップS81において、タッチ領域を表すタッチ領域画像Obj’を示す情報を生成する。次に、処理装置82は、ステップS83において、タッチ領域画像Obj’を示す情報に基づいて、タッチ領域の重心座標を検出し、検出した座標を示す位置情報LIを生成する。ステップS83の処理終了後、処理装置82は、図21に示す一連の処理を終了し、ステップS31の処理を実行する。
説明を図18に戻す。処理装置82は、ステップS31において、通信装置90を用いて、位置情報LIをプロジェクター10に送信する。
位置情報LIを受け付けた場合、処理装置12は、ステップS41において、位置情報LIに応じた処理を実行する。次に、処理装置12は、ステップS43において、位置情報LIに応じた処理によって生成された描画画像GDと、画像情報VIが示す画像とを重畳した画像を示す画像情報を生成する。そして、処理装置12は、ステップS45において、位置検出システム1の動作が終了するか否かを判定する。位置検出システム1の動作が終了する場合とは、例えば、プロジェクター10が有する不図示の電源ボタンがオフに設定された場合である。位置検出システム1の動作が終了しない、言い換えれば、位置検出システム1の動作が継続する場合、処理装置12は、処理をステップS11に戻す。具体的には、ステップS11において、可視光投射装置16は、ステップS43により生成した画像情報が示す画像を投射する。
位置検出システム1の動作が終了する場合、処理装置12は、図18に示す一連の処理を終了する。
ステップS31の処理終了後、処理装置82は、ステップS33において、位置検出システム1の動作が終了するか否かを判定する。位置検出システム1の動作が終了しない場合、処理装置12は、処理をステップS21に戻す。位置検出システム1の動作が終了する場合、赤外光投射装置84は、ステップS35において、模様画像BGの投射を終了する。ステップS35の処理終了後、処理装置82は、図18に示す一連の処理を終了する。
1.4.位置検出システム1の効果
以上、実施形態における処理装置82は、第1特定部822、第2特定部824、及び検出部826として機能する。第1特定部822は、所定模様を示す模様画像BGが投射される投射面SCを指示体が指示する第1状況において第1撮像装置18−1が投射面SCを撮像することによって生成される第1画像情報C1Iと、模様画像BGに基づく第1模様画像情報C1−BGIと、に基づいて、第1画像情報C1Iが示す第1画像C1のうち、指示体が映る指示体領域を特定する。指示体領域は、「第1領域」の一例である。第2特定部824は、第1状況において第2撮像装置18−2が投射面SCを撮像することによって生成される第2画像情報C2Iと、第1画像情報C1Iと、に基づいて、第2画像情報C2Iが示す第2画像C2と第1画像C1との差分を表す差分画像SSのうち、輝度値が第1閾値以下である投射面近傍領域を特定する。差分画像SSは、「撮像差分画像」の一例である。投射面近傍領域は、「第2領域」の一例である。検出部826は、指示体領域と投射面近傍領域とに基づいて、投射面SCのうち指示体が指示する位置を検出する。
仮に、位置検出装置80から指示体までの距離を算出する場合、第1画像C1と第2画像C2との間で類似する箇所を検出し、対応付けを行う必要がある。しかしながら、対応付け操作において、以下に示す3つの要因によって距離の算出結果に大きな誤差が発生し、指示体が指示する位置を精度良く検出できない場合がある。第1の要因は、第1画像C1及び第2画像C2は、赤外光の画像であり、可視光の画像と比較して、類似する箇所を検出することが困難なことである。第2の要因は、指示体及び投射面SCには、複雑な模様がなく、特徴が乏しいため、指示体及び投射面SCを検出することが困難なことである。第3の要因として、投射面SC上に発生する支持体の影と、指示体との切り分けが困難なためである。指示体の形状と、指示体の影の形状とは、ほぼ同一の形状であり、状況によっては輝度値も近くなる。
一方、本実施形態において、投射面近傍領域には、投射面SCのうち、第1撮像装置18−1及び第2撮像装置18−2から見て指示体等の物体によって遮られない領域と、第1撮像装置18−1及び第2撮像装置18−2から見て、投射面SCの近傍にある指示体の一部とが含まれる。従って、指示体領域と投射面近傍領域とが互いに重なる領域は、投射面SCの近傍にある指示体の一部が映る領域となる。従って、処理装置82によれば、位置検出装置80から指示体までの距離を算出しないので、指示体が指示する位置を精度よく検出できる。
以上、実施形態における処理装置82は、第1特定部822、第2特定部824、及び検出部826として機能する。第1特定部822は、所定模様を示す模様画像BGが投射される投射面SCを指示体が指示する第1状況において第1撮像装置18−1が投射面SCを撮像することによって生成される第1画像情報C1Iと、模様画像BGに基づく第1模様画像情報C1−BGIと、に基づいて、第1画像情報C1Iが示す第1画像C1のうち、指示体が映る指示体領域を特定する。指示体領域は、「第1領域」の一例である。第2特定部824は、第1状況において第2撮像装置18−2が投射面SCを撮像することによって生成される第2画像情報C2Iと、第1画像情報C1Iと、に基づいて、第2画像情報C2Iが示す第2画像C2と第1画像C1との差分を表す差分画像SSのうち、輝度値が第1閾値以下である投射面近傍領域を特定する。差分画像SSは、「撮像差分画像」の一例である。投射面近傍領域は、「第2領域」の一例である。検出部826は、指示体領域と投射面近傍領域とに基づいて、投射面SCのうち指示体が指示する位置を検出する。
仮に、位置検出装置80から指示体までの距離を算出する場合、第1画像C1と第2画像C2との間で類似する箇所を検出し、対応付けを行う必要がある。しかしながら、対応付け操作において、以下に示す3つの要因によって距離の算出結果に大きな誤差が発生し、指示体が指示する位置を精度良く検出できない場合がある。第1の要因は、第1画像C1及び第2画像C2は、赤外光の画像であり、可視光の画像と比較して、類似する箇所を検出することが困難なことである。第2の要因は、指示体及び投射面SCには、複雑な模様がなく、特徴が乏しいため、指示体及び投射面SCを検出することが困難なことである。第3の要因として、投射面SC上に発生する支持体の影と、指示体との切り分けが困難なためである。指示体の形状と、指示体の影の形状とは、ほぼ同一の形状であり、状況によっては輝度値も近くなる。
一方、本実施形態において、投射面近傍領域には、投射面SCのうち、第1撮像装置18−1及び第2撮像装置18−2から見て指示体等の物体によって遮られない領域と、第1撮像装置18−1及び第2撮像装置18−2から見て、投射面SCの近傍にある指示体の一部とが含まれる。従って、指示体領域と投射面近傍領域とが互いに重なる領域は、投射面SCの近傍にある指示体の一部が映る領域となる。従って、処理装置82によれば、位置検出装置80から指示体までの距離を算出しないので、指示体が指示する位置を精度よく検出できる。
また、第1模様画像情報C1−BGIは、投射面SCと第1撮像装置18−1との間に指示体が存在しない第2状況において第1撮像装置18−1が投射面SCを撮像することによって生成される情報である。
投射面SCの形状が平面でない、又は突起物が張り付いているといった状態である場合、第1画像C1には、投射面SCの状態が反映されるので、第1画像情報C1Iと第1模様画像情報C1−BGIとの差分には、指示体が映るか否かが反映される。一方、第1模様画像情報C1−BGIと、模様画像BGそのものを示す情報である原本模様画像情報BGIとの差分は、指示体が映るか否かと、投射面SCの状態とが反映される。従って、本実施形態によれば、第1模様画像情報C1−BGIと原本模様画像情報BGIとの差分を用いる場合と比較して、指示体領域の特定が正確になり、指示体が指示する位置の検出精度が向上する。
投射面SCの形状が平面でない、又は突起物が張り付いているといった状態である場合、第1画像C1には、投射面SCの状態が反映されるので、第1画像情報C1Iと第1模様画像情報C1−BGIとの差分には、指示体が映るか否かが反映される。一方、第1模様画像情報C1−BGIと、模様画像BGそのものを示す情報である原本模様画像情報BGIとの差分は、指示体が映るか否かと、投射面SCの状態とが反映される。従って、本実施形態によれば、第1模様画像情報C1−BGIと原本模様画像情報BGIとの差分を用いる場合と比較して、指示体領域の特定が正確になり、指示体が指示する位置の検出精度が向上する。
また、第1特定部822は、第1模様画像情報C1−BGIが示す第1模様撮像画像C1−BGと第1画像C1との差分を表す差分画像C1’に基づいて、指示体領域を特定する。差分画像C1’は、「第1差分画像」の一例である。
第1模様撮像画像C1−BGと第1画像C1との差分が、指示体が映るか否かである。従って、本実施形態に差分画像C1’を用いることにより指示体領域を特定できる。
第1模様撮像画像C1−BGと第1画像C1との差分が、指示体が映るか否かである。従って、本実施形態に差分画像C1’を用いることにより指示体領域を特定できる。
第1特定部822は、第1画像C1のうち、所定模様を有さない領域を、指示体の影が映る第1影領域として特定し、差分画像C1’から第1影領域を除いた第1指示体領域に基づいて、指示体領域を特定する。第1指示体領域は、「第4領域」の一例である。
指示体によって投射面SCに影が発生すると、指示体と指示体の影とは形状が類似しているため、指示体の影を指示体であるとして特定する可能性がある。本実施形態によれば、影の領域を除いた領域に基づいて指示体が指示する位置を検出するため、指示体が指示する位置の検出精度が向上する。
指示体によって投射面SCに影が発生すると、指示体と指示体の影とは形状が類似しているため、指示体の影を指示体であるとして特定する可能性がある。本実施形態によれば、影の領域を除いた領域に基づいて指示体が指示する位置を検出するため、指示体が指示する位置の検出精度が向上する。
第1特定部822は、第2画像C2のうち、所定模様を有さない領域を、指示体の影が映る第2影領域として特定し、模様画像BGに基づく第2模様画像情報C2−BGIが示す第2模様撮像画像C2−BGと第2画像C2との差分を表す差分画像C2’から第2影領域を除いた第2指示体領域と、第1指示体領域とが互いに重なる領域を指示体領域として特定する。第2影領域は、第5領域の一例である。差分画像C2’は、第2差分画像の一例である。
第1撮像装置18−1と第2撮像装置18−2との視差によって、第1画像C1に映る指示体と、第2画像C2に映る指示体とは、投射面SCからの距離に応じて、画像内の位置がずれる。指示体が指示する位置は、指示体のうち投射面SCに近い部位の位置である。投射面SCに近い部位は、第1画像C1と第2画像C2との間で位置が大きく変わらない。第1指示体領域と第2指示体領域とが互いに重なる領域は、指示体のうち投射面SCに近い部位が映る領域とみなせる。従って、本実施形態によれば、指示体のうち投射面SCに近い部位が映る領域を、指示体領域として特定する。これにより、位置検出装置80は、指示体のうち投射面SCから離れた部位が示す位置を指示体が指示する位置であると特定することを回避できるので、指示体が指示する位置の検出精度が向上する。
第1撮像装置18−1と第2撮像装置18−2との視差によって、第1画像C1に映る指示体と、第2画像C2に映る指示体とは、投射面SCからの距離に応じて、画像内の位置がずれる。指示体が指示する位置は、指示体のうち投射面SCに近い部位の位置である。投射面SCに近い部位は、第1画像C1と第2画像C2との間で位置が大きく変わらない。第1指示体領域と第2指示体領域とが互いに重なる領域は、指示体のうち投射面SCに近い部位が映る領域とみなせる。従って、本実施形態によれば、指示体のうち投射面SCに近い部位が映る領域を、指示体領域として特定する。これにより、位置検出装置80は、指示体のうち投射面SCから離れた部位が示す位置を指示体が指示する位置であると特定することを回避できるので、指示体が指示する位置の検出精度が向上する。
2.変形例
本発明の位置検出装置及び位置検出システムについて図示の実施形態に基づいて説明したが、本発明は、これらに限定されない。また、本発明の各部の構成は、前述の実施形態の同様の機能を発揮する任意の構成に置換することができ、また、任意の構成を付加することもできる。また、本発明は、前述の各実施形態の任意の構成同士を組み合わせるようにしてもよい。
本発明の位置検出装置及び位置検出システムについて図示の実施形態に基づいて説明したが、本発明は、これらに限定されない。また、本発明の各部の構成は、前述の実施形態の同様の機能を発揮する任意の構成に置換することができ、また、任意の構成を付加することもできる。また、本発明は、前述の各実施形態の任意の構成同士を組み合わせるようにしてもよい。
2.1.第1変形例
実施形態は、プロジェクター10と位置検出装置80とを有する位置検出システム1であったが、これに限らない。例えば、指示体の位置を検出するプロジェクターでもよい。
実施形態は、プロジェクター10と位置検出装置80とを有する位置検出システム1であったが、これに限らない。例えば、指示体の位置を検出するプロジェクターでもよい。
図22は、第1変形例におけるプロジェクター10aの構成を示す図である。プロジェクター10aは、処理装置12aと、記憶装置14aと、投射装置17と、第1撮像装置18−1と、第2撮像装置18−2とを有する。プロジェクター10の各要素は、情報を通信するためのバス21で相互に接続される。
処理装置12aは、CPU等のコンピューターである。なお、処理装置12aは、1又は複数のプロセッサーによって構成されてもよい。
記憶装置14aは、磁気的記憶装置又はフラッシュROM(Read only memory)等で構成される。記憶装置14aは、処理装置12aが読取可能な記録媒体であり、処理装置12aが実行する制御プログラムを含む複数のプログラム、原本模様画像情報BGI、第1模様画像情報C1−BGI、第2模様画像情報C2−BGI、第1座標変換テーブルLT1、第2座標変換テーブルLT2、及び、処理装置12aが使用する各種の情報などを記憶する。
投射装置17は、可視光の画像と赤外光の画像とを重畳して投射面SCに投射可能である。
図23は、プロジェクター10aの機能を示す図である。処理装置12aは、記憶装置14aから制御プログラムを読み出し、この制御プログラムを実行することによって、画像処理部122、インタラクティブ処理部124、撮像処理部126、第1特定部822、第2特定部824、及び、検出部826として機能する。
通常モードにおいて、投射装置17は、パーソナルコンピューターから受信した画像情報VIに対して画像処理を施した画像Gを可視光の画像として投射し、模様画像BGを赤外光の画像として投射する。
以上、第1変形例において、プロジェクター10aは、所定模様を示す模様画像BGを、投射面SCに投射する投射装置17と、投射面SCを撮像する第1撮像装置18−1と、投射面SCを撮像する第2撮像装置18−2と、処理装置12aとを備える。処理装置12aは、第1特定部822と、第2特定部824と、検出部826として機能する。第1変形例によれば、プロジェクター10aから指示体までの距離を算出しないので、指示体が指示する位置を精度よく検出できる。
2.2.第2変形例
実施形態において、プロジェクター10が、第1撮像装置18−1と第2撮像装置18−2とを有したが、これに限らず、位置検出装置80が、第1撮像装置18−1と第2撮像装置18−2とを有してもよい。
実施形態において、プロジェクター10が、第1撮像装置18−1と第2撮像装置18−2とを有したが、これに限らず、位置検出装置80が、第1撮像装置18−1と第2撮像装置18−2とを有してもよい。
2.3.第3変形例
実施形態、第1変形例、及び、第2変形例において、キャリブレーションモードで第1模様画像情報C1−BGI及び第2模様画像情報C2−BGIを生成したが、通常モードで第1模様画像情報C1−BGI及び第2模様画像情報C2−BGIを更新してもよい。プロジェクター10は、第1画像情報C1I、及び、第2画像情報C2Iを繰り返し生成する。一定期間、生成した第1画像情報C1Iが示す第1画像C1、及び、第2画像情報C2Iが示す第2画像C2に変化がない場合、処理装置82は、この変化がない第1画像C1を示す第1画像情報C1Iを第1模様画像情報C1−BGIに設定し、第2画像C2を示す第2画像情報C2Iを第2模様画像情報C2−BGIに設定する。
実施形態、第1変形例、及び、第2変形例において、キャリブレーションモードで第1模様画像情報C1−BGI及び第2模様画像情報C2−BGIを生成したが、通常モードで第1模様画像情報C1−BGI及び第2模様画像情報C2−BGIを更新してもよい。プロジェクター10は、第1画像情報C1I、及び、第2画像情報C2Iを繰り返し生成する。一定期間、生成した第1画像情報C1Iが示す第1画像C1、及び、第2画像情報C2Iが示す第2画像C2に変化がない場合、処理装置82は、この変化がない第1画像C1を示す第1画像情報C1Iを第1模様画像情報C1−BGIに設定し、第2画像C2を示す第2画像情報C2Iを第2模様画像情報C2−BGIに設定する。
第3変形例によれば、投射面SCの状態が変化した場合に、この変化した状態を第1模様画像情報C1−BGI及び第2模様画像情報C2−BGIに反映できるので、指示体領域の特定が正確になり、指示体が指示する位置の検出精度が向上する。投射面SCの状態が変化する態様は、例えば、以下に示す2つの態様がある。第1の態様は、投射面SCに張り付けられた突起物が追加される、突起物が移動される、又は、突起物が除去されることである。第2の態様は、太陽光に含まれる赤外光により、投射面SCに投射される模様画像BGが変化することである。
2.4.第4変形例
上述の形態において、第1模様画像情報C1−BGIは、投射面SCと第1撮像装置18−1との間に指示体が存在しない第2状況において第1撮像装置18−1が投射面SCを撮像することによって生成される情報であったが、これに限らない。例えば、第1模様画像情報C1−BGIは、模様画像BGであってもよい。但し、実施形態で説明したように、実施形態は第4変形例と比較して、指示体が指示する位置の検出精度が向上する。
上述の形態において、第1模様画像情報C1−BGIは、投射面SCと第1撮像装置18−1との間に指示体が存在しない第2状況において第1撮像装置18−1が投射面SCを撮像することによって生成される情報であったが、これに限らない。例えば、第1模様画像情報C1−BGIは、模様画像BGであってもよい。但し、実施形態で説明したように、実施形態は第4変形例と比較して、指示体が指示する位置の検出精度が向上する。
2.5.第5変形例
上述の形態において、第1特定部822は、差分画像C1’が表す第1差分領域から第1影領域を除いた第1指示体領域に基づいて、指示体領域を特定するが、これに限らない。例えば、第1特定部822は、差分画像C1’が表す第1差分領域と、差分画像C2’が表す第2差分領域とが互いに重なる領域を、指示体領域として特定してもよい。但し、実施形態に記載したように、実施形態は第5変形例と比較して、指示体が指示する位置の検出精度が向上する。
上述の形態において、第1特定部822は、差分画像C1’が表す第1差分領域から第1影領域を除いた第1指示体領域に基づいて、指示体領域を特定するが、これに限らない。例えば、第1特定部822は、差分画像C1’が表す第1差分領域と、差分画像C2’が表す第2差分領域とが互いに重なる領域を、指示体領域として特定してもよい。但し、実施形態に記載したように、実施形態は第5変形例と比較して、指示体が指示する位置の検出精度が向上する。
2.6.第6変形例
上述の形態において、第1特定部822は、第2指示体領域と、第1指示体領域とが互いに重なる領域を指示体領域として特定するが、これに限らない。例えば、第1特定部822は、第1指示体領域を指示体領域として特定してもよい。言い換えれば、第1特定部882は、第1画像情報C1Iと、第1模様画像情報C1−BGIとに基づいて指示体領域を特定してもよい。但し、実施形態に記載したように、実施形態は第6変形例と比較して、指示体が指示する位置の検出精度が向上する。
上述の形態において、第1特定部822は、第2指示体領域と、第1指示体領域とが互いに重なる領域を指示体領域として特定するが、これに限らない。例えば、第1特定部822は、第1指示体領域を指示体領域として特定してもよい。言い換えれば、第1特定部882は、第1画像情報C1Iと、第1模様画像情報C1−BGIとに基づいて指示体領域を特定してもよい。但し、実施形態に記載したように、実施形態は第6変形例と比較して、指示体が指示する位置の検出精度が向上する。
2.7.第7変形例
実施形態における可視光投射装置16では、光変調装置として液晶ライトバルブが用いられたが、光変調装置は液晶ライトバルブに限らず適宜変更可能である。例えば、光変調装置は、3枚の反射型の液晶パネルを用いた構成であってもよい。また、光変調装置は、1枚の液晶パネルを用いた方式、3枚のデジタルミラーデバイス(DMD)を用いた方式、1枚のデジタルミラーデバイスを用いた方式等の構成であってもよい。光変調装置として1枚のみの液晶パネル又はDMDが用いられる場合には、色分離光学系や色合成光学系に相当する部材は不要である。また、液晶パネル及びDMD以外にも、光源が発した光を変調可能な構成は、光変調装置として採用できる。
実施形態における可視光投射装置16では、光変調装置として液晶ライトバルブが用いられたが、光変調装置は液晶ライトバルブに限らず適宜変更可能である。例えば、光変調装置は、3枚の反射型の液晶パネルを用いた構成であってもよい。また、光変調装置は、1枚の液晶パネルを用いた方式、3枚のデジタルミラーデバイス(DMD)を用いた方式、1枚のデジタルミラーデバイスを用いた方式等の構成であってもよい。光変調装置として1枚のみの液晶パネル又はDMDが用いられる場合には、色分離光学系や色合成光学系に相当する部材は不要である。また、液晶パネル及びDMD以外にも、光源が発した光を変調可能な構成は、光変調装置として採用できる。
2.8.第8変形例
処理装置12及び処理装置82がプログラムを実行することによって実現される要素の全部又は一部は、例えばFPGA(Field Programmable Gate Array)又はASIC(Application Specific IC)等の電子回路によりハードウェアで実現されてもよいし、ソフトウェアとハードウェアとの協働により実現されてもよい。
処理装置12及び処理装置82がプログラムを実行することによって実現される要素の全部又は一部は、例えばFPGA(Field Programmable Gate Array)又はASIC(Application Specific IC)等の電子回路によりハードウェアで実現されてもよいし、ソフトウェアとハードウェアとの協働により実現されてもよい。
2.9.第9変形例
上述の各形態は、上述の処理装置82を、第1特定部822、第2特定部824、及び検出部826として機能させるように構成されたコンピュータプログラム又は当該コンピュータプログラムを記録したコンピューター読み取り可能な記録媒体として捉えることもできる。記録媒体は例えば非一過性の記録媒体であり、CD−ROM等の光学式記録媒体の他、半導体記録媒体や磁気記録媒体等の公知の任意の記録媒体を含み得る。また、本開示は上述した各態様にかかる位置検出方法としても特定される。
上述の各形態は、上述の処理装置82を、第1特定部822、第2特定部824、及び検出部826として機能させるように構成されたコンピュータプログラム又は当該コンピュータプログラムを記録したコンピューター読み取り可能な記録媒体として捉えることもできる。記録媒体は例えば非一過性の記録媒体であり、CD−ROM等の光学式記録媒体の他、半導体記録媒体や磁気記録媒体等の公知の任意の記録媒体を含み得る。また、本開示は上述した各態様にかかる位置検出方法としても特定される。
1…位置検出システム、10,10a…プロジェクター、16…可視光投射装置、17…投射装置、18−1…第1撮像装置、18−2…第2撮像装置、8222…差分領域特定部、8224…影領域特定部、8226…指示体領域特定部、BG…模様画像、C1…第1画像、C1’…差分画像、C1−BGI…第1模様画像情報、C1−S…第1影領域画像、C2…第2画像、C2’…差分画像、C2−BGI…第2模様画像情報、C2−S…第2影領域画像Obj…指示体領域画像、Obj’…タッチ領域画像、SC…投射面、SH…影、SS…差分画像、SS’…投射面近傍画像、U…ユーザー。
Claims (7)
- 位置検出装置が実行する位置検出方法であって、
所定模様を示す模様画像が投射される投射面を指示体が指示する第1状況において第1撮像装置が前記投射面を撮像することによって生成される第1画像情報と、前記模様画像に基づく第1模様画像情報と、に基づいて、前記第1画像情報が示す第1画像のうち、前記指示体が映る第1領域を特定し、
前記第1状況において第2撮像装置が前記投射面を撮像することによって生成される第2画像情報と、前記第1画像情報と、に基づいて、前記第2画像情報が示す第2画像と前記第1画像との差分を表す撮像差分画像のうち、輝度値が第1閾値以下である第2領域を特定し、
前記第1領域と前記第2領域とに基づいて、前記投射面のうち前記指示体が指示する位置を検出する、
位置検出方法。 - 前記第1模様画像情報は、前記投射面と前記第1撮像装置との間に前記指示体が存在しない第2状況において前記第1撮像装置が前記投射面を撮像することによって生成される情報である、
請求項1に記載の位置検出方法。 - 前記第1模様画像情報が示す画像と前記第1画像との差分を表す第1差分画像に基づいて、前記第1領域を特定する、
請求項1又は2に記載の位置検出方法。 - 前記第1画像のうち、前記所定模様を有さない領域を、前記指示体の影が映る第3領域として特定し、
前記第1差分画像から前記第3領域を除いた第4領域に基づいて、前記第1領域を特定する、
請求項3に記載の位置検出方法。 - 前記第2画像のうち、前記所定模様を有さない領域を、前記指示体の影が映る第5領域として特定し、
前記模様画像に基づく第2模様画像情報が示す画像と前記第2画像との差分を表す第2差分画像から前記第5領域を除いた第6領域と、前記第4領域とが互いに重なる領域を、前記第1領域として特定する、
請求項4に記載の位置検出方法。 - 所定模様を示す模様画像が投射される投射面を指示体が指示する第1状況において第1撮像装置が前記投射面を撮像することによって生成される第1画像情報と、前記模様画像に基づく第1模様画像情報と、に基づいて、前記第1画像情報が示す第1画像のうち、前記指示体が映る第1領域を特定する第1特定部と、
前記第1状況において第2撮像装置が前記投射面を撮像することによって生成される第2画像情報と、前記第1画像情報と、に基づいて、前記第2画像情報が示す第2画像と前記第1画像との差分を表す撮像差分画像のうち、輝度値が第1閾値以下である第2領域を特定する第2特定部と、
前記第1領域と前記第2領域とに基づいて、前記投射面のうち前記指示体が指示する位置を検出する検出部と、
を備える位置検出装置。 - 所定模様を示す模様画像を、投射面に投射する投射装置と、
前記投射面を撮像する第1撮像装置と、
前記投射面を撮像する第2撮像装置と、
処理装置と、を備え、
前記処理装置は、
前記模様画像が投射される前記投射面を指示体が指示する第1状況において前記第1撮像装置が前記投射面を撮像することによって生成される第1画像情報と、前記模様画像に基づく第1模様画像情報と、に基づいて、前記第1画像情報が示す第1画像のうち、前記指示体が映る第1領域を特定する第1特定部と、
前記第1状況において前記第2撮像装置が前記投射面を撮像することによって生成される第2画像情報と、前記第1画像情報と、に基づいて、前記第2画像情報が示す第2画像と前記第1画像との差分を表す撮像差分画像のうち、輝度値が第1閾値以下である第2領域を特定する第2特定部と、
前記第1領域と前記第2領域とに基づいて、前記投射面のうち前記指示体が指示する位置を検出する検出部と、
を備えるプロジェクター。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020095320A JP2021189826A (ja) | 2020-06-01 | 2020-06-01 | 位置検出方法、位置検出装置、及びプロジェクター |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020095320A JP2021189826A (ja) | 2020-06-01 | 2020-06-01 | 位置検出方法、位置検出装置、及びプロジェクター |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2021189826A true JP2021189826A (ja) | 2021-12-13 |
Family
ID=78849603
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020095320A Pending JP2021189826A (ja) | 2020-06-01 | 2020-06-01 | 位置検出方法、位置検出装置、及びプロジェクター |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2021189826A (ja) |
-
2020
- 2020-06-01 JP JP2020095320A patent/JP2021189826A/ja active Pending
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| TWI566602B (zh) | 投影機及投影機之控制方法 | |
| JP6809292B2 (ja) | プロジェクターおよびプロジェクターの制御方法 | |
| JP7151126B2 (ja) | プロジェクター、及び、プロジェクターの制御方法 | |
| US11146768B2 (en) | Projection system and projection method | |
| US11611731B2 (en) | Evaluation method for image projection system, image projection system, and image projection control apparatus | |
| CN109698947A (zh) | 投影仪和投影仪的控制方法 | |
| JP2013182061A (ja) | 投影システム | |
| US10909947B2 (en) | Display device, display system, and method of controlling display device | |
| JP2012018214A (ja) | 投写型映像表示装置 | |
| JP2020039082A (ja) | 表示装置、表示システムおよび表示装置の制御方法 | |
| JP2021189826A (ja) | 位置検出方法、位置検出装置、及びプロジェクター | |
| US20220132088A1 (en) | Specifying method, specifying system, and non-transitory computer-readable storage medium storing a program | |
| JP7347205B2 (ja) | 投写システムの制御方法、投写システム及び制御プログラム | |
| JP7125561B2 (ja) | 制御装置、投影システム、制御方法、制御プログラム | |
| JP2020005049A (ja) | 投射システム、プロジェクター、投射システムの制御方法およびプロジェクターの制御方法 | |
| US10474020B2 (en) | Display apparatus and method for controlling display apparatus to display an image with an orientation based on a user's position | |
| JP6221287B2 (ja) | プロジェクター及びプロジェクターの制御方法 | |
| JP2021021845A (ja) | プロジェクターの制御方法、及びプロジェクター | |
| JP6642032B2 (ja) | プロジェクター及びプロジェクターの制御方法 | |
| JP2020191045A (ja) | 指示体、表示システムおよび動作方法 | |
| JP6822209B2 (ja) | プロジェクターおよびプロジェクターの制御方法 | |
| JP7302640B2 (ja) | 表示装置の動作方法および表示装置 | |
| US11567396B2 (en) | Projection apparatus | |
| JP7188176B2 (ja) | プロジェクター、画像表示システム及び画像表示システムの制御方法 | |
| CN114115582B (zh) | 位置检测方法、投影仪的控制方法、位置检测装置和投影仪 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20210916 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20211102 |