JP2021108564A - 握り寿司製造装置 - Google Patents
握り寿司製造装置 Download PDFInfo
- Publication number
- JP2021108564A JP2021108564A JP2020001978A JP2020001978A JP2021108564A JP 2021108564 A JP2021108564 A JP 2021108564A JP 2020001978 A JP2020001978 A JP 2020001978A JP 2020001978 A JP2020001978 A JP 2020001978A JP 2021108564 A JP2021108564 A JP 2021108564A
- Authority
- JP
- Japan
- Prior art keywords
- sushi
- ball
- gripping hand
- robot
- arm
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 241000209094 Oryza Species 0.000 claims abstract description 59
- 235000007164 Oryza sativa Nutrition 0.000 claims abstract description 59
- 235000009566 rice Nutrition 0.000 claims abstract description 59
- 239000000463 material Substances 0.000 claims description 157
- 238000004519 manufacturing process Methods 0.000 claims description 38
- 230000007246 mechanism Effects 0.000 claims description 20
- 230000003028 elevating effect Effects 0.000 claims description 12
- 238000000465 moulding Methods 0.000 claims description 8
- 244000195452 Wasabia japonica Species 0.000 claims description 6
- 235000000760 Wasabia japonica Nutrition 0.000 claims description 6
- 230000001174 ascending effect Effects 0.000 claims description 5
- 238000000034 method Methods 0.000 description 10
- 230000008569 process Effects 0.000 description 10
- 238000007493 shaping process Methods 0.000 description 8
- 241001181114 Neta Species 0.000 description 5
- 235000021186 dishes Nutrition 0.000 description 3
- 239000012636 effector Substances 0.000 description 3
- 230000000694 effects Effects 0.000 description 2
- 230000000630 rising effect Effects 0.000 description 2
- 238000011144 upstream manufacturing Methods 0.000 description 2
- 230000009471 action Effects 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 239000000428 dust Substances 0.000 description 1
- 239000004615 ingredient Substances 0.000 description 1
- 230000002250 progressing effect Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000032258 transport Effects 0.000 description 1
Images




Landscapes
- Cereal-Derived Products (AREA)
Abstract
Description
前記ネタ把持ハンドは、前記ネタ移載装置からネタを移載された後、前記双腕ロボット正面の寿司成形位置に移動し、前記シャリ玉把持ハンドは、前記シャリ玉ロボットからシャリ玉を掴み上げた後、前記寿司成形位置まで移動して、前記シャリ玉を前記ネタ把持ハンドにより保持されているネタの上に供給することを特徴とする握り寿司製造装置である。
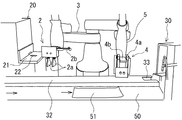
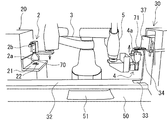
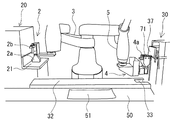
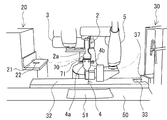
(1)シャリ玉ロボット20内において、一貫分の握り寿司形状のシャリ玉70が連続的に成形され、成形されたシャリ玉70が1つずつ、ケース上面のシャリ玉供給用テーブル面21に設けられた供出口22から、テーブル面21の高さまで押し上げられる(図5,6)。
(2)シャリ玉把持ハンド2が、シャリ玉供給用テーブル面21の供出口22上に移動する(図6)。その際シャリ玉把持ハンド2の掴持ハンド2aは開いていて、下向きの状態となっている。
(3)シャリ玉把持ハンド2がテーブル面21まで下降し、掴持ハンド2aが閉動作してシャリ玉を掴み、そのまま上昇する(図7)。
(4)シャリ玉把持ハンド2は、上昇端に達した後旋回し、双腕ロボット1の正面においてネタ71を保持して待機しているネタ把持ハンド4上に移動する(図8)。なお、シャリ玉把持ハンド2が先に移動して待機するようにしてもよいし、シャリ玉把持ハンド2とネタ把持ハンド4が同時に到来することとしてもよい。
(5)シャリ玉把持ハンド2の掴持ハンド2aはネタ把持ハンド4上において開動作し、掴持していたシャリ玉70を、ネタ把持ハンド4に保持されているネタ71上に落とす(図8)。
(6)ネタ把持ハンド4の整形ハンド4aは軽く開閉動作をしてシャリ玉70を適度に押し固め(握り操作1)、また、シャリ玉把持ハンド2は、ネタ把持ハンド4から外れる位置まで後退し、90度回転した後1又は複数回上下動し、指形状の押し部材2bでシャリ玉70を押してネタ71になじませると共に、形を整える(握り操作2)(図9)。握り操作1と握り操作2は、同時に又は交互に行い、また、握り操作1と握り操作2は複数回行うこととしてもよい。
(7)シャリ玉把持ハンド2は、その後シャリ玉供給用テーブル面21の供出口22上に移動し、シャリ玉ロボット20からのシャリ玉70の供出を待ち(図10,11)、以後上記動作を反復する。
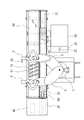
(8)ネタ移載装置30の移載機構34は、下降端において、キャリア板31が昇降フレーム37内に後退した状態で、ネタ71がネタ供給コンベア31上を搬送されてくるのを待つ(図5,8)。
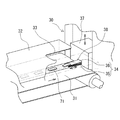
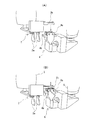
(9)図示せぬセンサがネタ71の到来を感知すると、キャリア板31が移載ベルト32と一体にネタ供給コンベア31の表面に沿って前進し、先端部がネタ71に接する(図2)。その際移載ベルト32は、キャリア板31の移動方向とは逆方向(後ろ向き)に循環しているため、ネタ71がネタ供給コンベア31から移載ベルト32上にすくい上げられる。
(10)ネタ71をすくい上げた後、移載ベルト32の循環動作は停止し、ネタ移載機構34はその状態のまま上昇し、上昇端において昇降フレーム37がネタ供給位置まで前進してネタ把持ハンド4の到来を待つ(図6)。
(11)ネタ移載機構34の下側にネタ把持ハンド4が到来すると、ネタ移載機構34は上記と逆の動きをし、即ち、キャリア板31が後退動作し、移載ベルト32が前向きに循環動作する結果、移載ベルト32上のネタ71は移載ベルト32から脱落してネタ把持ハンド4上に落ちる(図7,4)。
(12)その後ネタ移載機構34は、後退した状態のまま下降し、下降端において次のネタ71の到来を待つ(図8)。
(13)ネタ移送アーム5は、整形ハンド4aが開いた状態のネタ把持ハンド4を正面向き、且つ、下向きにした状態(図5)から始動し、先ず、ネタ把持ハンド4を上向きに回動させた後、外方に90度旋回させて上昇させる(図6)。その際、ネタ移載機構34は、ネタ71を把持した状態で上昇端にて待機しているので、ネタ把持ハンド4はネタ移載機構34の下側に位置することになる。
(14)上記ネタ移載機構34の動作(上記動作(11))に伴って、ネタ把持ハンド4の整形ハンド4a間の受け板4b上にネタ71が移載される(図4,7)。
(15)その後ネタ把持ハンド4は、上向きのまま180度旋回して双腕ロボット1の正面の成形位置に移動し、その位置でシャリ玉把持ハンド2の到来を待つ(図8)。上記動作(4)において述べたように、シャリ玉把持ハンド2が先に移動して待機することもあり、また、シャリ玉把持ハンド2とネタ把持ハンド4が同時に到来することもある。
(16)シャリ玉把持ハンド2が到来して掴持ハンド2aが開動作をするに伴い、シャリ玉70がネタ把持ハンド4に把持されているネタ71上に載置され(図8)、次いで、上述した動作(6)における握り操作1及び握り操作2が行われる(図9)。
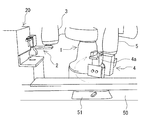
(17)その後ネタ把持ハンド4は、水平方向に適宜角度(50〜80度程度)回転すると共に、垂直方向に180度回転して下向きとなり、その状態のまま皿51の少し上にまで下降する(図10,11)。
(18)その位置において整形ハンド4aが開動作して寿司を解放し、皿51上に所定間隔置きに並べていく(図1)。上記動作(17)において、ネタ把持ハンド4が水平方向に適宜角度回転することにより、寿司72が、皿51上に体裁よく傾いた状態に並べられることになる。
(19)その後ネタ把持ハンド4は、上記と逆に動作して、図5に示すネタ71の待ち受け位置に戻り、ネタ71の供給を待つ。
2 シャリ玉把持ハンド
2a 掴持ハンド
2b 押し部材
3 シャリ玉移送アーム
4 ネタ把持ハンド
4a 整形ハンド
4b 受け板
5 ネタ移送アーム
20 シャリ玉ロボット
30 ネタ移載装置
31 ネタ供給コンベア
34 移載機構
35 キャリア板
36 移載ベルト
40 サビ打ちロボット
50 皿搬送コンベア
70 シャリ玉
71 ネタ
72 寿司
Claims (9)
- 先端にシャリ玉把持ハンドを装備した垂直多関節アームであるシャリ玉移送アームと、先端にネタ把持ハンドを装備した垂直多関節アームであるネタ移送アームとを備えた双腕ロボットと、
前記双腕ロボットの前記シャリ玉移送アーム側に配置されて、握り寿司一貫分のシャリ玉成形を行い、前記シャリ玉把持ハンドによる掴み上げ位置に供出するシャリ玉ロボットと、
前記双腕ロボットの前記ネタ移送アーム側に配置されて、前記ネタ把持ハンドにネタを移載するネタ移載装置と、
製造された寿司を載置するための皿を定位置に供給する皿搬送手段とを含み、
前記ネタ把持ハンドは、前記ネタ移載装置からネタを移載された後、前記双腕ロボット正面の寿司成形位置に移動し、前記シャリ玉把持ハンドは、前記シャリ玉ロボットからシャリ玉を掴み上げた後、前記寿司成形位置まで移動して、前記シャリ玉を前記ネタ把持ハンドにより保持されているネタの上に供給することを特徴とする握り寿司製造装置。 - 前記ネタ把持ハンドは、前記シャリ玉の供給を受けた後、開閉動作をして適圧にてシャリ玉の側面を挟圧する機能を有している、請求項1に記載の握り寿司製造装置。
- 前記シャリ玉把持ハンドは、前記ネタ把持ハンドに供給したシャリ玉を上方から加圧整形する押し部材を備えている、請求項1又は2に記載の握り寿司製造装置。
- 前記ネタ移載装置は、前記双腕ロボットの前を横切るように設置されるネタ供給コンベアの下流端に配置され、前記ネタ供給コンベアによって搬送されてくるネタをすくい取る移載機構を備える、請求項1乃至3のいずれかに記載の握り寿司製造装置。
- 前記ネタ移載装置は、前記移載機構を昇降させる昇降シリンダーを備え、前記移載機構はその下降端において前記ネタ供給コンベアからネタをすくい取り、その上昇端において前記ネタ把持ハンドにそのネタを移載する、請求項4に記載の握り寿司製造装置。
- 前記シャリ玉ロボットは、前記シャリ玉把持ハンドが到来するシャリ玉供出用テーブル面を備えていて、成形した一貫分のシャリ玉を前記テーブル面に形成された供出口から前記テーブル面上に押し上げる機能を有している、請求項1乃至5のいずれかに記載の握り寿司製造装置。
- 前記皿搬送手段は、前記ネタ供給コンベアと平行に配置される皿搬送コンベアである、請求項1乃至6のいずれかに記載の握り寿司製造装置。
- 前記皿搬送手段は、前記双腕ロボットの前側に設置されて、皿を1枚ずつ定位置まで押し上げるリフター機能を有するものである、請求項1乃至7のいずれかに記載の握り寿司製造装置。
- 前記ネタ移載装置に保持されているネタにワサビを供給するサビ打ちロボットを更に含む、請求項1乃至8のいずれかに記載の握り寿司製造装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020001978A JP7489055B2 (ja) | 2020-01-09 | 2020-01-09 | 握り寿司製造装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020001978A JP7489055B2 (ja) | 2020-01-09 | 2020-01-09 | 握り寿司製造装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2021108564A true JP2021108564A (ja) | 2021-08-02 |
| JP7489055B2 JP7489055B2 (ja) | 2024-05-23 |
Family
ID=77058188
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020001978A Active JP7489055B2 (ja) | 2020-01-09 | 2020-01-09 | 握り寿司製造装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7489055B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2023155022A (ja) * | 2022-04-08 | 2023-10-20 | 株式会社タカラトミーアーツ | 軌道走行玩具 |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5603086B2 (ja) | 2010-01-07 | 2014-10-08 | 鈴茂器工株式会社 | シャリ玉成形方法およびシャリ玉成形装置 |
| JP4878069B1 (ja) | 2010-09-30 | 2012-02-15 | 鈴茂器工株式会社 | 寿司玉成形装置 |
-
2020
- 2020-01-09 JP JP2020001978A patent/JP7489055B2/ja active Active
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2023155022A (ja) * | 2022-04-08 | 2023-10-20 | 株式会社タカラトミーアーツ | 軌道走行玩具 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7489055B2 (ja) | 2024-05-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN213760518U (zh) | 食品生产用设备 | |
| CN109521665B (zh) | 一种钟表外壳自动装配和压紧机构 | |
| CN210223987U (zh) | 全自动晶圆片下片上蜡回流线 | |
| JP2021108564A (ja) | 握り寿司製造装置 | |
| JP4926489B2 (ja) | 寿司等の弁当容器盛付方法及び装置 | |
| CN206536977U (zh) | 一种全自动碟盘烫印机 | |
| JP6041310B2 (ja) | 食品把持装置と容器詰め装置 | |
| CN106241404B (zh) | 一种叠模侧取式餐具包装系统及包装方法 | |
| JP6379012B2 (ja) | 物品移送装置 | |
| JP4497479B2 (ja) | 食品の盛り付け方法及び装置 | |
| US8104808B1 (en) | Dough ball lifter | |
| US8702140B2 (en) | Dough ball lifter | |
| MXPA05009225A (es) | Alimentador automatico de platos y/o moldes de productos de pasteleria al tren de formado. | |
| JPH01172123A (ja) | 物品の移載方法 | |
| JP6881869B2 (ja) | 軍艦巻成形移載装置 | |
| CN113349629A (zh) | 一种食物烹煮机 | |
| JPH02192834A (ja) | トランスファプレス | |
| CN117530475B (zh) | 食品生产线 | |
| CN222357145U (zh) | 一种糕点立体裱花系统 | |
| JP7478217B2 (ja) | 物品収納枠体 | |
| CN218404670U (zh) | 布料自动送料机 | |
| JPH10276657A (ja) | 食品の多面焼成方法とその装置 | |
| JP6781518B2 (ja) | 軍艦巻成形移載装置および軍艦巻成形移載方法 | |
| JP7449330B2 (ja) | コンベアシステム | |
| JP7622486B2 (ja) | ロボットハンド、ロボット、及び箱詰めシステム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A80 | Written request to apply exceptions to lack of novelty of invention |
Free format text: JAPANESE INTERMEDIATE CODE: A80 Effective date: 20200130 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230106 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230118 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20231221 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240105 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240206 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240404 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240426 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240501 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240508 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240509 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7489055 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |