JP2020184814A - ステッピングモータ制御装置及びプログラム - Google Patents
ステッピングモータ制御装置及びプログラム Download PDFInfo
- Publication number
- JP2020184814A JP2020184814A JP2019086581A JP2019086581A JP2020184814A JP 2020184814 A JP2020184814 A JP 2020184814A JP 2019086581 A JP2019086581 A JP 2019086581A JP 2019086581 A JP2019086581 A JP 2019086581A JP 2020184814 A JP2020184814 A JP 2020184814A
- Authority
- JP
- Japan
- Prior art keywords
- stepping motor
- amplitude
- current
- signal
- current command
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images



Landscapes
- Control Of Stepping Motors (AREA)
Abstract
Description
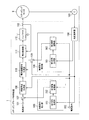
図1は、実施形態のステッピングモータ制御装置1の機能構成の一例を示す図である。
ステッピングモータ制御装置1は、ステッピングモータ9を駆動する。
ステッピングモータ9は、電力の供給を受けて回転することでトルクを発生する2相のステッピングモータである。すなわちステッピングモータ9は、電気エネルギーを運動エネルギーに変換する2相のステッピングモータである。
ステッピングモータ9は、式(1)及び(2)で表される波形(すなわち、角速度ω_<exc>(t)が時間に依存する角速度である正弦波)の電流が駆動電流(ステッピングモータの電流)として印加されることでマイクロステップ駆動する。なお、_<・・・>は、下付き文字を表す。例えば、ω_<exc>は、ωexcを表す。以下、角速度ω_<exc>(t)を励磁角度という。

角度指令取得端子101は、角度指令ω_<ref>・tを示すパルス列の信号を取得する。角度指令ω_<ref>・tは、ステッピングモータ9を回転させる角度を示す。ω_<ref>は角速度の次元の値である。電流指令取得端子102は、電流指令Iを取得する。
式(3)は、第1信号が基本波と第2高調波と第4高調波との合成波であることを表す。式(3)における合成波の基本波は、角速度がエンコーダ角速度の正弦波である。
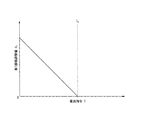
図2は、電流指令Iと第1振幅調整値d_<1>とが、Iが0以上I_<b>未満の場合には、線形の関係であることを示す。図2は、電流指令IがI_<b>未満の場合には、電流指令Iが小さいほど第1振幅調整値d_<1>が大きな値であることを示す。図2は、IがI_<b>以上では、第1振幅調整値d_<1>が0であることを示す。なお、電流指令Iは、ステッピングモータ9の回転速度の上昇に比例して増加する値であるため、電流指令Iが小さくなることは、ステッピングモータ9の回転速度が遅くなることを意味する。
式(5)は、第2信号が基本波と第2高調波と第4高調波との合成波であることを表す。式(5)における合成波の基本波は、角速度がエンコーダ角速度の正弦波である。
図3は、電流指令Iと第2振幅調整値d_<2>とが、IがI_<b>以上の場合には、線形の関係であることを示す。図3は、電流指令IがI_<b>以上の場合には、電流指令Iが大きいほど第2振幅調整値d_<2>が大きな値であることを示す。図3は、IがI_<b>未満では、第2振幅調整値d_<2>が0であることを示す。なお、電流指令Iは、ステッピングモータ9の回転速度の上昇に比例して増加する値であるため、電流指令Iが大きくなることは、ステッピングモータ9の回転速度が速くなることを意味する。
インバータ112とステッピングモータ9との間にはシャント抵抗113が位置する。シャント抵抗113に流れる電流を電流制御器111は取得する。電流制御器111は、取得したシャント抵抗113を流れる電流に応じて、波形H(t)の電流がステッピングモータ9に印加されるようにインバータ112の動作を制御する。すなわち、電流制御器111は、シャント抵抗113を流れる電流に基づくフィードバック制御によって、波形H(t)の電流がステッピングモータ9に印加されるようにインバータ112の動作を制御する。
角度指令取得端子101に、角度指令が入力される(ステップS101)。電流指令取得端子102に、電流指令が入力される(ステップS102)。ステッピングモータ9が回転を開始する(ステップS103)。エンコーダ103が回転中のステッピングモータ9から回転に応じた波形の信号を取得する(ステップS104)。角度演算器104が、ステップS104において取得された信号に基づいてエンコーダ角を取得する(ステップS105)。
図5は、実施形態のステッピングモータ制御装置1によって外乱の影響が抑制されることを示す実験結果の一例を示す図である。
図5(A)は、従来のステッピングモータにおける振動レベルと回転速度との関係を示す図である。図5(A)において、横軸は回転速度を表す。図5(A)において縦軸は振動レベルを表す。
図5(B)は、ステッピングモータ制御装置1の制御によって動作するステッピングモータ9の振動レベルと回転速度との関係を示す図である。図5(B)において、横軸は回転速度を表す。図5(B)において縦軸は振動レベルを表す。
図5(B)は、基本波の振動レベルが略(−50)〜略(−30)であることを示す。図5(B)は、第2高調波の振動レベルが略(−50)〜略(−25)であることを示す。図5(B)は、第4高調波の振動レベルが略(−50)〜略(−20)であることを示す。
なお、ステッピングモータ9は必ずしも2相でなくてもよい。ステッピングモータ9は、2相以上の複数相であってもよい。
なお、励磁角度は、次数が4以上の偶数次の高調波に基づいてもよい。すなわち、式(3)及び式(5)において、合成波は、基本波と第2高調波と第4高調波とにくわえて、さらに、Q×ωenc(Qは6以上の偶数)を角速度とする正弦波の和であってもよい。
なお、励磁角度は、基本波と第2高調波と第4高調波とに代えて、基本波と、第3高調波と、次数が3の倍数の高調波とに基づいてもよい。次数が3の倍数の高調波は、例えば、第6高調波である。
Claims (7)
- マイクロステップ駆動するステッピングモータを制御するステッピングモータ制御装置であって、
前記ステッピングモータを駆動するインバータと、
前記ステッピングモータの電流を制御するための電流制御器と、
前記ステッピングモータの回転を検出する検出部と、
位相変化が前記ステッピングモータの回転角の時間変化に同一な正弦波を基本波とし、振幅及び位相に関する第1条件を満たすように前記基本波と前記基本波の高調波とが合成された合成波を第1合成波として、位相変化が前記第1合成波の位相変化に同一な信号であって振幅が前記ステッピングモータの回転速度に応じた第1振幅に調整された信号である角度補正信号を生成する角度指令補正部と、
を備え、
前記ステッピングモータの電流の位相の時間変化は前記角度補正信号の時間変化に同一である、
ステッピングモータ制御装置。 - 位相変化が前記ステッピングモータの回転角の時間変化に同一な正弦波を基本波とし、振幅及び位相に関する第2条件を満たすように前記基本波と前記基本波の高調波とが合成された合成波を第2合成波として、位相変化が前記第2合成波の位相変化に同一な信号であって振幅が前記ステッピングモータの回転速度に応じた第2振幅に調整された信号である振幅補正信号を生成する電流指令補正部、
をさらに備え、
前記ステッピングモータの電流の振幅の時間変化は前記振幅補正信号の時間変化に同一である、
請求項1に記載のステッピングモータ制御装置。 - 前記ステッピングモータの回転速度に比例する値を電流指令として、前記第1振幅を前記電流指令で割り算した値は、前記電流指令が所定の値未満である場合に、前記電流指令が小さいほど大きな値である、
請求項1又は2に記載のステッピングモータ制御装置。 - マイクロステップ駆動するステッピングモータを制御するステッピングモータ制御装置であって、
前記ステッピングモータを駆動するインバータと、
前記ステッピングモータの電流を制御するための電流制御器と、
前記ステッピングモータの回転を検出する検出部と、
位相変化が前記ステッピングモータの回転角の時間変化に同一な正弦波を基本波とし、振幅及び位相に関する第2条件を満たすように前記基本波と前記基本波の高調波とが合成された合成波を第2合成波として、位相変化が前記第2合成波の位相変化に同一な信号であって振幅が前記ステッピングモータの回転速度に応じた第2振幅に調整された信号である振幅補正信号を生成する電流指令補正部と、
を備え、
前記ステッピングモータの電流の振幅の時間変化は、前記振幅補正信号の時間変化に同一である、
ステッピングモータ制御装置。 - 前記ステッピングモータの回転速度に比例する値を電流指令として、前記第2振幅を前記電流指令で割り算した値は、前記電流指令が所定の値以上である場合に、前記電流指令が大きいほど大きい値である、
請求項2又は4に記載のステッピングモータ制御装置。 - 前記高調波の次数は、2次及び4次である、
請求項1から5のいずれか一項に記載のステッピングモータ制御装置。 - 請求項1から6のいずれか一項に記載のステッピングモータ制御装置としてコンピュータを機能させるためのプログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019086581A JP7267561B2 (ja) | 2019-04-26 | 2019-04-26 | ステッピングモータ制御装置及びプログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019086581A JP7267561B2 (ja) | 2019-04-26 | 2019-04-26 | ステッピングモータ制御装置及びプログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020184814A true JP2020184814A (ja) | 2020-11-12 |
| JP7267561B2 JP7267561B2 (ja) | 2023-05-02 |
Family
ID=73044720
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019086581A Active JP7267561B2 (ja) | 2019-04-26 | 2019-04-26 | ステッピングモータ制御装置及びプログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7267561B2 (ja) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6264293A (ja) * | 1985-08-22 | 1987-03-23 | Yokogawa Electric Corp | モ−タ駆動回路 |
| JPH06245592A (ja) * | 1993-02-18 | 1994-09-02 | Toshiba Corp | 駆動モータの制御装置 |
| JP2005210786A (ja) * | 2004-01-20 | 2005-08-04 | Sanmei Denshi Sangyo Kk | ステッピングモータのマイクロステップ駆動装置およびその制御方法ならびにその運転方法 |
| US20080116835A1 (en) * | 2006-11-21 | 2008-05-22 | Tsui Wang Hay Kenneth | Model-based active electronic damping for stepper motors |
| JP2008278643A (ja) * | 2007-04-27 | 2008-11-13 | Canon Inc | ステッピングモータ駆動装置 |
-
2019
- 2019-04-26 JP JP2019086581A patent/JP7267561B2/ja active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6264293A (ja) * | 1985-08-22 | 1987-03-23 | Yokogawa Electric Corp | モ−タ駆動回路 |
| JPH06245592A (ja) * | 1993-02-18 | 1994-09-02 | Toshiba Corp | 駆動モータの制御装置 |
| JP2005210786A (ja) * | 2004-01-20 | 2005-08-04 | Sanmei Denshi Sangyo Kk | ステッピングモータのマイクロステップ駆動装置およびその制御方法ならびにその運転方法 |
| US20080116835A1 (en) * | 2006-11-21 | 2008-05-22 | Tsui Wang Hay Kenneth | Model-based active electronic damping for stepper motors |
| JP2008278643A (ja) * | 2007-04-27 | 2008-11-13 | Canon Inc | ステッピングモータ駆動装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7267561B2 (ja) | 2023-05-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR100790914B1 (ko) | 회전 전자기 장치에서 토르크 불규칙성을 능동적으로감소시키는 방법 및 장치 | |
| JP4685509B2 (ja) | 交流電動機の駆動制御装置および駆動制御方法 | |
| EP3264593B1 (en) | Control arrangement for a generator | |
| CN106050565B (zh) | 用于风力涡轮机的噪声控制的装置和方法 | |
| CN102823127B (zh) | 基于锁相环的扭转模式阻尼系统和方法 | |
| EP3494635B1 (en) | Control arrangement for a generator | |
| WO2018139295A1 (ja) | インバータ制御装置 | |
| CN102246409B (zh) | 用于风能变换系统的发电机的直接功率和定子通量向量控制 | |
| JP2006033993A (ja) | 電動機の回転位置検出装置の原点オフセット量算出方法およびこの算出方法を用いた電動機制御装置 | |
| KR102604003B1 (ko) | 모터 제어 장치, 모터 제어 시스템 및 모터 제어 방법 | |
| EP3454469A1 (en) | Torque ripple reduction for a generator | |
| TW201642573A (zh) | 用於控制無齒輪風力渦輪機之同步發電機的方法 | |
| JP2006020397A (ja) | モータ制御装置 | |
| JP6536460B2 (ja) | インバータ制御装置 | |
| CN110603729B (zh) | 用于调节电机的方法、用于电机的调节设备和电驱动系统 | |
| JP2020184814A (ja) | ステッピングモータ制御装置及びプログラム | |
| JP5808210B2 (ja) | モータ制御装置およびモータ制御方法 | |
| JP5298452B2 (ja) | モータインバータ制御装置及びモータ制御方法 | |
| JP4380271B2 (ja) | 同期電動機の制御装置 | |
| US20120274251A1 (en) | Harmonic noise reduction | |
| JP3814826B2 (ja) | 同期電動機のベクトル制御方法 | |
| JP2005176566A (ja) | 単相誘導電動機の制御装置 | |
| KR100933393B1 (ko) | 유도 전동기의 직접 토크 제어 장치 및 방법 | |
| JP5862691B2 (ja) | 電動機駆動装置の制御装置および電動機駆動システム | |
| JP2022074821A (ja) | 同期電動機の制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220330 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20220330 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20220401 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20230111 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230117 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230309 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230322 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230411 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7267561 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |