JP2020164085A - 車両制御システム - Google Patents
車両制御システム Download PDFInfo
- Publication number
- JP2020164085A JP2020164085A JP2019067801A JP2019067801A JP2020164085A JP 2020164085 A JP2020164085 A JP 2020164085A JP 2019067801 A JP2019067801 A JP 2019067801A JP 2019067801 A JP2019067801 A JP 2019067801A JP 2020164085 A JP2020164085 A JP 2020164085A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- light source
- state
- driver
- headlight
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q1/00—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor
- B60Q1/26—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to indicate the vehicle, or parts thereof, or to give signals, to other traffic
- B60Q1/46—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to indicate the vehicle, or parts thereof, or to give signals, to other traffic for giving flashing caution signals during drive, other than signalling change of direction, e.g. flashing the headlights or hazard lights
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/09—Taking automatic action to avoid collision, e.g. braking and steering
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q1/00—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor
- B60Q1/02—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments
- B60Q1/04—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments the devices being headlights
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q1/00—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor
- B60Q1/02—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments
- B60Q1/04—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments the devices being headlights
- B60Q1/06—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments the devices being headlights adjustable, e.g. remotely-controlled from inside vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q1/00—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor
- B60Q1/26—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to indicate the vehicle, or parts thereof, or to give signals, to other traffic
- B60Q1/50—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to indicate the vehicle, or parts thereof, or to give signals, to other traffic for indicating other intentions or conditions, e.g. request for waiting or overtaking
- B60Q1/507—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to indicate the vehicle, or parts thereof, or to give signals, to other traffic for indicating other intentions or conditions, e.g. request for waiting or overtaking specific to autonomous vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q1/00—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor
- B60Q1/26—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to indicate the vehicle, or parts thereof, or to give signals, to other traffic
- B60Q1/50—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to indicate the vehicle, or parts thereof, or to give signals, to other traffic for indicating other intentions or conditions, e.g. request for waiting or overtaking
- B60Q1/52—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to indicate the vehicle, or parts thereof, or to give signals, to other traffic for indicating other intentions or conditions, e.g. request for waiting or overtaking for indicating emergencies
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q1/00—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor
- B60Q1/26—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to indicate the vehicle, or parts thereof, or to give signals, to other traffic
- B60Q1/50—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to indicate the vehicle, or parts thereof, or to give signals, to other traffic for indicating other intentions or conditions, e.g. request for waiting or overtaking
- B60Q1/544—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to indicate the vehicle, or parts thereof, or to give signals, to other traffic for indicating other intentions or conditions, e.g. request for waiting or overtaking for indicating other states or conditions of the vehicle occupants, e.g. for indicating disabled occupants
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q5/00—Arrangement or adaptation of acoustic signal devices
- B60Q5/005—Arrangement or adaptation of acoustic signal devices automatically actuated
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/20—Conjoint control of vehicle sub-units of different type or different function including control of steering systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/30—Conjoint control of vehicle sub-units of different type or different function including control of auxiliary equipment, e.g. air-conditioning compressors or oil pumps
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/08—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to drivers or passengers
- B60W40/09—Driving style or behaviour
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/001—Planning or execution of driving tasks
- B60W60/0015—Planning or execution of driving tasks specially adapted for safety
- B60W60/0018—Planning or execution of driving tasks specially adapted for safety by employing degraded modes, e.g. reducing speed, in response to suboptimal conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/005—Handover processes
- B60W60/0051—Handover processes from occupants to vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R11/00—Arrangements for holding or mounting articles, not otherwise provided for
- B60R11/04—Mounting of cameras operative during drive; Arrangement of controls thereof relative to the vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R11/00—Arrangements for holding or mounting articles, not otherwise provided for
- B60R2011/0001—Arrangements for holding or mounting articles, not otherwise provided for characterised by position
- B60R2011/0003—Arrangements for holding or mounting articles, not otherwise provided for characterised by position inside the vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/26—Incapacity
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D1/00—Steering controls, i.e. means for initiating a change of direction of the vehicle
- B62D1/02—Steering controls, i.e. means for initiating a change of direction of the vehicle vehicle-mounted
- B62D1/04—Hand wheels
- B62D1/06—Rims, e.g. with heating means; Rim covers
Abstract
【課題】 自動運転を行う車両制御システムにおいて、運転者の運転への介入不能な異常状態を検知したときに、介入不能状況を歩行者や周辺車両の乗員により確実に理解させる。【解決手段】車両制御システム(1、101、201、301)であって、車両の操舵、加速、及び減速を行う制御装置15と、車外に光によって報知する車外報知装置14と、運転者の運転への介入を検知する介入検知装置(26、27)とを有し、制御装置は、車両の走行中に制御装置又は運転者による車両の走行の継続が困難である所定の条件が満たされたときに、車両を所定の停車領域内に停止させる停車処理を実行し、車外報知装置は前照灯14eを含み、制御装置は、停車処理において前照灯の照射態様の切り替えを繰り返し実行する。【選択図】 図4
Description
本開示は、自動運転を行う車両制御システムに関する。
運転者が運転困難な状態にあると判定した後に、車両を適切な位置に自動走行させて停止させる走行制御装置が公知である(たとえば、特許文献1)。特許文献1の走行制御装置は、走行用前照灯の点灯を行って、自車両の周囲を走行する他の車両に警戒を促す。
走行用前照灯の点灯は車両が暗所を走行するときにも行われる。よって、走行用前照灯の点灯では、運転者の運転への介入不能状況が歩行者や周辺車両の乗員に理解され難いという問題がある。
本発明は、以上の背景を鑑み、自動運転を行う車両制御システムにおいて、運転者の運転への介入不能な異常状態を検知したときに、歩行者や周辺車両の乗員に介入不能状況をより確実に理解させることを課題とする。
車両制御システム(1、101、201、301)であって、車両の操舵、加速、及び減速を行う制御装置(15)と、車外に光によって報知する車外報知装置(14)と、運転者の運転への介入を検知する介入検知装置(26、27)とを有し、前記制御装置は、前記車両の走行中に前記制御装置又は前記運転者による前記車両の走行の継続が困難である所定の条件が満たされたときに、前記車両を所定の停車領域内に停止させる停車処理を実行し、前記車外報知装置は前照灯(14e)を含み、前記制御装置は、前記停車処理において前記前照灯の照射態様の切り替えを繰り返し実行する。
この構成によれば、運転者が介入不能な異常状態となった後、停車処理において、前照灯の照射態様の切り替えが繰り返し実行される。これにより、前照灯が単なる点灯とは異なる態様で動作するため、運転者の介入不能状況が歩行者や周辺車両の乗員によって理解され易くなる。
上記の態様において、前記前照灯は、照射距離の異なる第1の状態と第2の状態とに変更可能に構成され、前記制御装置は、前記前照灯を前記第1の状態と前記第2の状態とに変更させることにより、前記照射態様の前記切り替えを繰り返し実行するとよい。
この構成によれば、2つの照射態様の切り替えによって周囲に異常を理解させることができる。よって、3つ以上の照射態様の間で切り替えを行う場合に比べて、制御装置の構成が簡素になる。
上記の態様において、前記前照灯は照射距離の異なる第1光源(61e)と第2光源(62e)とを含み、前記第1の状態のときに前記第1光源が点灯し、かつ前記第2光源が消灯し、前記第2の状態のときに前記第1光源が消灯し、かつ前記第2光源が点灯するとよい。
この構成によれば、第1光源及び第2光源を交互に点滅させる単純な動作により、前照灯の照射態様の切り替えを行うことができる。
上記の態様において、前記前照灯は照射距離の異なる第1光源(161e)と第2光源(162e)とを含み、前記第1の状態のときに前記第1光源が点灯し、かつ前記第2光源が消灯し、前記第2の状態のときに前記第1光源及び前記第2光源が点灯するとよい。
この構成によれば、照射態様の切り替え時に第1光源を消す必要がない。よって、第1光源として点灯までに時間を要する光源を利用することができる。
上記の態様において、前記前照灯は照射方向を少なくとも2方向に変位可能に設けられた光源(262e)を含み、前記第1の状態のときに前記光源が水平方向より下向き前方に照射され、前記第2の状態のときに前記光源が前記第1の状態のときより上向きに照射されるとよい。
この構成によれば、車両に設ける前照灯の数を少なくすることができる。
上記の態様において、車室内の乗員の状態を監視する乗員監視装置を更に有し、前記制御装置は、前記乗員監視装置による監視結果に基づいて、前記運転者の健康状態が正常であると判定したときに、前記前照灯の前記照射態様の前記切り替えを禁止するとよい。
この構成によれば、運転者の健康状態が正常であるときには、自力での退避が可能であるため、照射態様の切り替えが規制される。これによって、運転者の健康状態に問題がなく緊急性を要しない場合には、周囲の歩行者及び車両の乗員に不快感をもたらすことを防ぐことができる。
上記の態様において、前記車外報知装置は尾灯(14g)を更に含み、前記制御装置は、前記停車処理において前記前照灯を点灯させ、かつ前記尾灯を点灯させるとよい。
この構成によれば、運転者の介入不能状況が後続車両の乗員によって理解され易くなる。
以上の構成によれば、自動運転を行う車両制御システムにおいて、運転者の介入不能な異常状態を検知したときに、介入不能状況を歩行者や周辺車両の乗員により確実に理解させることができる。
以下、図面を参照して、本発明に係る車両制御システムの実施形態について説明する。以下では、本発明に係る車両制御システムを、左側走行を採用する国又は地域において走行している車両を制御するシステムに適用した例について説明を行う。
<<第1実施形態>>
図1に示すように、車両制御システム1は、車両に搭載された車両システム2に含まれている。車両システム2は、推進装置3、ブレーキ装置4、ステアリング装置5、外界認識装置6、車両センサ7、通信装置8、ナビゲーション装置9(地図装置)、運転操作装置10、乗員監視装置11、HMI12(Human Machine Interface)、自動運転レベル切替スイッチ13、車外報知装置14、及び制御装置15を有している。車両システム2の各構成は、CAN16(Controller Area Network)等の通信手段によって信号伝達可能に互いに接続されている。
図1に示すように、車両制御システム1は、車両に搭載された車両システム2に含まれている。車両システム2は、推進装置3、ブレーキ装置4、ステアリング装置5、外界認識装置6、車両センサ7、通信装置8、ナビゲーション装置9(地図装置)、運転操作装置10、乗員監視装置11、HMI12(Human Machine Interface)、自動運転レベル切替スイッチ13、車外報知装置14、及び制御装置15を有している。車両システム2の各構成は、CAN16(Controller Area Network)等の通信手段によって信号伝達可能に互いに接続されている。
推進装置3は車両に駆動力を付与する装置であり、例えば動力源及び変速機を含む。動力源はガソリンエンジンやディーゼルエンジン等の内燃機関及び電動機の少なくとも一方を有する。ブレーキ装置4は車両に制動力を付与する装置であり、例えばブレーキロータにパッドを押し付けるブレーキキャリパと、ブレーキキャリパに油圧を供給する電動シリンダとを含む。ブレーキ装置4はワイヤケーブルによって車輪の回転を規制するパーキングブレーキ装置を含んでもよい。ステアリング装置5は車輪の舵角を変えるための装置であり、例えば車輪を転舵するラックアンドピニオン機構と、ラックアンドピニオン機構を駆動する電動モータとを有する。推進装置3、ブレーキ装置4、及びステアリング装置5は、制御装置15によって制御される。
外界認識装置6は車外の物体等を検出する装置である。外界認識装置6は、車両の周辺からの電磁波や光を捉えて車外の物体等を検出するセンサ、例えば、レーダ17、ライダ18(LIDAR)、及び車外カメラ19を含む。外界認識装置6は、その他、車外からの信号を受信して、車外の物体等を検出する装置であってもよい。外界認識装置6は検出結果を制御装置15に出力する。
レーダ17はミリ波等の電波を車両の周囲に発射し、その反射波を捉えることにより、物体の位置(距離及び方向)を検出する。レーダ17は車両の任意の箇所に少なくとも1つ取り付けられている。レーダ17は、少なくとも車両の前方に向けて電波を照射する前方レーダ、車両の後方に向けて電波を照射する後方レーダ、車両の側方に向けて電波を照射する左右一対の側方レーダを含むことが好ましい。
ライダ18は赤外線等の光を車両の周囲に照射し、その反射光を捉えることにより、物体の位置(距離及び方向)を検出する。ライダ18は車両の任意の箇所に少なくとも1つ設けられている。
車外カメラ19は車両の周囲に存在する物体(例えば、周辺車両や歩行者)や、ガードレール、縁石、壁、中央分離帯、道路の形状や道路に描かれた道路標示等を含む車両の周囲を撮像する。車外カメラ19は、例えば、CCDやCMOS等の固体撮像素子を利用したデジタルカメラであってよい。車外カメラ19は、車両の任意の箇所に少なくとも1つ設けられる。車外カメラ19は少なくとも車両の前方を撮像する前方カメラを含み、更に車両の後方を撮像する後方カメラ及び車両の左右側方を撮像する一対の側方カメラを含んでいるとよい。車外カメラ19は、例えばステレオカメラであってもよい。
車両センサ7は、車両の速度を検出する車速センサ、加速度を検出する加速度センサ、鉛直軸回りの角速度を検出するヨーレートセンサ、車両の向きを検出する方位センサ等を含む。ヨーレートセンサは、例えばジャイロセンサである。
通信装置8は制御装置15及びナビゲーション装置9と車外に位置する周辺車両やサーバとの間の通信を媒介する。制御装置15は通信装置8を介して周辺車両との間で無線通信を行うことができる。また、制御装置15は通信装置8を介して、交通規制情報の提供を行うサーバと通信を行うことができる。更に、制御装置15は通信装置8を介して車両の外部に存在する人が所持する携帯端末との通信することができる。また、制御装置15は通信装置8を介して車両からの緊急通報を受け付ける緊急通報センタとの通信することができる。
ナビゲーション装置9は車両の現在位置を取得し、目的地への経路案内等を行う装置であり、GNSS受信部21、地図記憶部22、ナビインタフェース23、経路決定部24を有する。GNSS受信部21は人工衛星(測位衛星)から受信した信号に基づいて車両の位置(緯度や経度)を特定する。地図記憶部22は、フラッシュメモリやハードディスク等の公知の記憶装置によって構成され、地図情報を記憶している。ナビインタフェース23は乗員からの目的地などの入力を受け付けると共に、乗員に表示や音声によって各種情報を提示する。ナビインタフェース23は例えばタッチパネルディスプレイや、スピーカ等を含むとよい。他の実施形態では、GNSS受信部21は通信装置8の一部として構成されていてもよい。また、地図記憶部22は制御装置15の一部として構成されてもよく、通信装置8を介して通信可能なサーバ装置の一部として構成されてもよい。
地図情報は、高速道路、有料道路、国道、都道府県道といった道路の種別、道路の車線数、各車線の中央位置(経度、緯度、高さを含む3次元座標)、道路区画線や車線の境界等の道路標示の形状、歩道や縁石、さく等の有無、交差点の位置、車線の合流及び分岐ポイントの位置、非常駐車帯の領域、各車線の幅員、道路に設けられた標識等の道路情報を含む。また、地図情報は、交通規制情報、住所情報(住所・郵便番号)、施設情報、電話番号情報等を含んでもよい。
経路決定部24は、GNSS受信部21により特定された車両の位置と、ナビインタフェース23から入力された目的地と、地図情報とに基づいて目的地までの経路を決定する。また、経路決定部24は、経路を決定するときに、地図情報の車線の合流及び分岐ポイントの位置を参照して、車両が走行すべき車線である目標車線も含めて決定するとよい。
運転操作装置10は、運転者が車両を制御するために行う入力操作を受け付ける。運転操作装置10は、例えば、ステアリングホイール、アクセルペダル、及びブレーキペダルを含む。また、運転操作装置10は、シフトレバーやパーキングブレーキレバー等を含んでもよい。各運転操作装置10には、操作量を検出するセンサが取り付けられている。運転操作装置10は操作量を示す信号を制御装置15に出力する。
乗員監視装置11は車室内の乗員の状態を監視する。乗員監視装置11は例えば、車室内のシートに着座する乗員を撮像する室内カメラ26、及びステアリングホイールに設けられた把持センサ27を有する。室内カメラ26は例えばCCDやCMOS等の固体撮像素子を利用したデジタルカメラである。把持センサ27は運転者がステアリングホイールを把持しているか否かを検出し、把持の有無を検出信号として出力するセンサである。把持センサ27は例えば、ステアリングホイールに設けられた静電容量センサや圧電素子によって形成されているとよい。乗員監視装置11はステアリングホイール又はシートに設けられた心拍センサやシートに設けられた着座センサを含んでもよい。乗員監視装置11はその他、乗員に着用され、着用した乗員の心拍数及び血圧の少なくとも一方を含むバイタル情報を検出可能なウェアラブルデバイスであってもよい。このとき、乗員監視装置11は公知の無線による通信手段によって、制御装置15と通信可能に構成されているとよい。乗員監視装置11は撮像された画像及び検出信号を制御装置15に出力する。
車外報知装置14は車外に音や光によって報知する装置であり、例えば、警告灯やホーンを含む。前照灯(フロントライト)や尾灯(テールライト)、ブレーキランプ、ハザードランプ、車内灯が警告灯として機能してもよい。
HMI12は、乗員に対して表示や音声によって各種情報を報知すると共に、乗員による入力操作を受け付ける。HMI12は、例えば、液晶や有機ELを含むタッチパネルや表示灯等の表示装置31、ブザーやスピーカ等の音発生装置32、及びタッチパネル上のGUIスイッチや機械スイッチ等の入力インタフェース33の少なくとも1つを含む。ナビインタフェース23がHMI12として機能するように構成されていてもよい。
自動運転レベル切替スイッチ13は、後述するレベル2以上の自動運転の実行開始の指示を乗員から受け付けるスイッチである。自動運転レベル切替スイッチ13は機械スイッチやタッチパネル上に表示されるGUIスイッチであってよく、車室内の適所に配置される。自動運転レベル切替スイッチ13は、HMI12の入力インタフェース33によって構成されてもよく、ナビインタフェース23によって構成されていてもよい。
制御装置15は、CPU、ROM、及びRAM等から構成される電子制御装置(ECU)である。制御装置15はCPUでプログラムに沿った演算処理を実行することで、各種の車両制御を実行する。制御装置15は1つのハードウェアとして構成されていてもよく、複数のハードウェアからなるユニットとして構成されていてもよい。また、制御装置15の各機能部の少なくとも一部は、LSIやASIC、FPGA等のハードウェアによって実現されてもよく、ソフトウェア及びハードウェアの組み合わせによって実現されてもよい。
制御装置15は各種の車両制御を組み合わせて、少なくともレベル0〜レベル3の自動運転制御(以下、自動運転)を行う。レベルはSAE J3016の定義に基づくものであって、運転者の運転操作及び車両周辺監視への介入の度合いに関連して定められている。
レベル0の自動運転では制御装置15は車両の制御を行わず、運転者が全ての運転操作を行う。すなわち、レベル0の自動運転はいわゆる手動運転を意味する。
レベル1の自動運転では制御装置15は一部の運転操作を行い、運転者が残りの運転操作を行う。例えば、レベル1の自動運転には定速走行及び車間距離制御(ACC;Adaptive Cruise Control)や車線維持支援制御(LKAS;Lane Keeping Assistance System)が含まれる。レベル1の自動運転は、レベル1の自動運転の実行に要する各種装置(例えば、外界認識装置6や車両センサ7)に異常がないという条件を満たすときに実行される。
レベル2の自動運転では制御装置15が全ての運転操作を行う。レベル2の自動運転は、運転者が車両周辺監視を行い、車両が予め定められた領域内にあり、且つ、レベル2の自動運転の実行に要する各種装置に異常がないという条件を満たすときに実行される。
レベル3の自動運転では制御装置15が全ての運転操作を行う。レベル3の自動運転は、運転者が必要に応じて車両周辺監視を行うことのできる姿勢であり、車両が予め定められた領域内にあり、且つ、レベル3の自動運転の実行に要する各種装置に異常がないという条件を満たすときに実行される。レベル3の自動運転が実行される条件には、例えば、車両が渋滞中の道路を走行しているときが含まれている。車両が渋滞中の道路上を走行しているか否かは車外のサーバから提供される交通規制情報に基づいて判定されてもよく、また、車速センサによって取得される車速が所定の時間に渡って、所定の徐行判定値(例えば、30km/h)以下であることに基づいて判定されてもよい。
このように、レベル1〜レベル3の自動運転では、制御装置15が操舵、加速、減速、及び周辺監視の少なくとも1つを実行する。制御装置15は自動運転モードにあるときに、レベル1〜レベル3の自動運転を実行する。以下では、必要に応じて、操舵、加速及び減速を運転操作と記載し、運転操作及び周辺監視を運転と記載する。
本実施形態では、自動運転レベル切替スイッチ13において、制御装置15はレベル2以上の自動運転の実行指示を受け付けると、外界認識装置6の検出結果、及びナビゲーション装置9によって取得された車両の位置に基づいて、車両の走行する環境に応じたレベルの自動運転を選択し、レベルの変更を行う。但し、制御装置15は、自動運転レベル切替スイッチ13への入力に応じて、レベルの変更を行ってもよい。
図1に示すように、制御装置15は自動運転制御部35、異常状態判定部36、状態管理部37、走行制御部38、及び記憶部39を有する。
自動運転制御部35は、外界認識部40、自車位置認識部41、及び行動計画部42を含む。外界認識部40は、外界認識装置6の検出結果に基づいて、車両の周辺に位置する障害物や、道路の形状、歩道の有無、道路標示を認識する。障害物は、例えば、ガードレールや電柱、周辺車両、歩行者等の人物を含む。外界認識部40は外界認識装置6の検出結果から、周辺車両の位置、速度及び加速度等の状態を取得することができる。周辺車両の位置は、周辺車両の重心位置やコーナー位置等の代表点、又は周辺車両の輪郭で表現された領域として認識されるとよい。
自車位置認識部41は、車両が走行している車線である走行車線、及び走行車線に対する車両の相対位置及び角度を認識する。自車位置認識部41は、例えば、地図記憶部22が保持する地図情報とGNSS受信部21が取得する車両の位置とに基づいて、走行車線を認識するとよい。また、路面に描かれた車両の周辺の区画線を地図情報から抽出し、車外カメラ19によって撮像された区画線の形状と比較して、走行車線に対する車両の相対位置、及び角度を認識するとよい。
行動計画部42は、経路に沿って車両を走行させるための行動計画を順次作成する。より具体的には、行動計画部42はまず車両が障害物と接触することなく、経路決定部24により決定された目標車線を走行するためのイベントを決定する。イベントには定速度で同じ走行車線を走行する定速走行イベント、乗員によって設定された設定速度又は車両の走行する環境に基づいて定められる速度以下の速度で、同じ走行車線を走行する前走車両に追従する追従イベント、車両の走行車線を変更する車線変更イベント、前走車両を追い越す追い越しイベント、道路の合流地点で車両を合流させる合流イベント、道路の分岐地点で車両を目的の方向に走行させる分岐イベント、自動運転を終了して手動運転にする自動運転終了イベント、及び、車両の走行中に制御装置15又は運転者による運転の継続が困難であることを示す所定の条件が満たされたときに車両を停止する停車イベントが含まれる。
行動計画部42が停車イベントを決定する条件には、自動運転での走行中に、運転者に対する運転への介入要求(ハンドオーバ要求)に応じた運転者からの室内カメラ26、把持センサ27、又は自動運転レベル切替スイッチ13への入力が検出されない場合が含まれる。介入要求とは、運転者に運転権限の一部が委譲されることを通知して、委譲される運転権限に対応する運転操作及び車両周辺監視の少なくとも一方の実行を運転者に要求する警告である。行動計画部42が停車イベントを決定する条件には、行動計画部42が、例えば心拍センサや室内カメラ26からの信号に基づいて、運転者が心拍停止状態などの運転操作を実行することができない異常にあると判定した場合が含まれているとよい。また、行動計画部42が停車イベントを決定する条件には、手動運転(レベル0)、及びレベル1の自動運転を実行中に、運転者が担うべき運転権限に対応する運転操作及び車両周辺監視を実行していないと行動計画部42が判定した場合が含まれているとよい。
行動計画部42は、これらのイベントの実行中に、車両の周辺状況(周辺車両や歩行者の存在、道路工事による車線狭窄等)に基づいて、障害物等を回避するための回避イベントを決定してもよい。
行動計画部42は、更に決定したイベントに基づいて、車両が将来走行すべき目標軌道を生成する。目標軌道は、車両が各時刻において到達すべき地点である軌道点を順に並べたものである。行動計画部42は、イベントごとに設定された目標速度、及び目標加速度に基づいて目標軌道を生成するとよい。このとき、目標速度及び目標加速度の情報は軌道点の間隔で表現される。
走行制御部38は、行動計画部42によって生成された目標軌道を、予定の時刻通りに車両が通過するように、推進装置3、ブレーキ装置4、及びステアリング装置5を制御する。
記憶部39はROMやRAM等によって構成され、自動運転制御部35、異常状態判定部36、状態管理部37、及び走行制御部38の処理に要する情報が記憶される。
異常状態判定部36は、車両状態判定部51と、乗員状態判定部52とを含む。車両状態判定部51は、実行中のレベルの自動運転に影響を与える各種装置(例えば、外界認識装置6や車両センサ7)の信号を解析し、各種装置に実行中の自動運転の維持に困難な異常が発生したか否かを判定する。
乗員状態判定部52は、乗員監視装置11からの信号に基づいて、運転者の状態が異常状態にあるか否かを判定する。異常状態とは、レベル1以下の運転者が操舵を行う義務がある自動運転においては、運転者が操舵を行うことが困難である状態を含む。運転者が操舵を行うことが困難な状態とは、具体的には運転者が寝ている状態、運転者が病気や怪我により動けない状態又は意識不明な状態、運転者が心停止している状態等を含む。乗員状態判定部52は、レベル1以下の運転者が操舵を行う義務がある自動運転において、把持センサ27への乗員からの入力がないときに、運転者の状態が異常状態にあると判定してもよい。また、乗員状態判定部52は抽出された顔画像から運転者のまぶたの開閉状態を判定する。乗員状態判定部52は運転者のまぶたが閉じられた状態が所定時間継続している場合や単位時間当たりのまぶたが閉じられる回数が所定の閾値以上である場合には、運転者が寝ている、強い眠気を感じている、意識不明である、又は心停止状態にあるとして、運転者が運転操作を行うことが困難な状態であり、運転者の状態が異常状態であると判定してもよい。乗員状態判定部52は更に撮像された画像から運転者の姿勢を取得し、運転者の姿勢が運転操作に適さず、且つ、姿勢が変化しない状態が所定時間に渡って維持されているときには運転者が病気や怪我により動けない状態であり、運転者の状態が異常状態であると判定してもよい。
また、周辺監視義務があるレベルの自動運転、すなわち、レベル2以下の自動運転においては、異常状態とは、運転者が車両周辺監視の義務を怠っている状態を含む。運転者が車両周辺監視の義務を怠っている状態とは、運転者がステアリングホイールを把持していない状態、又は運転者の視線が車両の前方を向いていない状態のいずれか1つを含む。乗員状態判定部52は、例えば、把持センサ27からの信号に基づいて、運転者がステアリングホイールを把持しているか否かを検出し、運転者がステアリングホイールを把持していない場合に運転者が車両周辺監視の義務を怠っている異常状態であると判定する。また、乗員状態判定部52は、室内カメラ26によって撮像された画像に基づいて、運転者の状態が異常状態にあるか否かを判定する。例えば、乗員状態判定部52は撮像された画像から公知の画像解析手段を用いて運転者の顔領域を抽出する。乗員状態判定部52は更に、抽出された顔領域から目頭、目尻、及び瞳孔を含む虹彩部分(以下、黒目)を抽出する。乗員状態判定部52は抽出された目頭、目尻、及び黒目の位置や、黒目の輪郭形状等に基づいて、運転者の視線方向を取得し、運転者の視線が車両の前方を向いていないときに運転者が車両周辺監視の義務を怠っている状態にあると判定する。
また、周辺監視義務がないレベルの自動運転、すなわち、レベル3の自動運転においては、異常状態とは、運転者に対して、運転交代要求が発生した際に、速やかに運転交代ができない状態を意味する。運転交代ができない状態とはシステム監視ができない状態を含み、システム監視ができない状況とは、運転者が警報表示を行う画面表示等を監視することができない状況であり、運転者が寝ている状況、及び後方を見ているという状況を含む。本実施形態では、レベル3の自動運転においては、異常状態には、運転者が車両周辺監視を行うように報知された場合に、車両周辺監視の義務を果たすことができない状態が含まれる。本実施形態では、乗員状態判定部52はHMI12の表示装置31に所定の画面を表示させ、運転者に表示装置31を見るように指示を行う。乗員状態判定部52は室内カメラ26によって運転者の視線を検知し、運転者の視線がHMI12の表示装置31に向かっていないと判定したときに、運転者は車両周辺監視の義務を果たすことができない異常状態にあると判定する。
乗員状態判定部52は、例えば、把持センサ27からの信号に基づいて、運転者がステアリングホイールを把持しているか否かを検出し、運転者がステアリングホイールを把持していない場合に運転者が車両周辺監視の義務を怠っている異常状態であると判定する。また、乗員状態判定部52は、室内カメラ26によって撮像された画像に基づいて、運転者の状態が異常状態にあるか否かを判定する。例えば、乗員状態判定部52は撮像された画像から公知の画像解析手段を用いて運転者の顔領域を抽出する。乗員状態判定部52は更に、抽出された顔領域から目頭、目尻、及び瞳孔を含む虹彩部分(以下、黒目)を抽出する。乗員状態判定部52は抽出された目頭、目尻、及び黒目の位置や、黒目の輪郭形状等に基づいて、運転者の視線方向を取得し、運転者の視線が車両の前方を向いていないときに運転者が車両周辺監視の義務を怠っている状態にあると判定する。
状態管理部37は自車位置、自動運転レベル切替スイッチ13の操作、及び異常状態判定部36の判定結果の少なくとも1つに基づいて、自動運転のレベルを決定する。更に、状態管理部37は決定したレベルに基づいて行動計画部42を制御することによって、各レベルに応じた自動運転を行う。例えば、状態管理部37はレベル1の自動運転であって定速走行制御を実行するときには、行動計画部42において決定されるイベントを定速走行イベントのみに制限する。
状態管理部37は設定されたレベルに応じた自動運転の実行に加えて、レベルの上昇及び下降を行う。
より具体的には、状態管理部37は移行後のレベルの自動運転を行う条件が満たされ、且つ、自動運転レベル切替スイッチ13に自動運転のレベルの上昇を指示する入力が行われたときに、レベルを上昇させる。
実行中のレベルの自動運転を行う条件が満たされないとき、又は自動運転レベル切替スイッチ13にレベルの下降を指示する入力が行われたときに、状態管理部37は介入要求処理を行う。介入要求処理において、状態管理部37は最初にハンドオーバ要求を運転者に通知する。運転者への通知は表示装置31へのメッセージや画像の表示や、音発生装置32からの音声や警告音の発生によって行われるとよい。運転者への通知は介入要求処理が開始された後、所定時間に渡って継続するように構成してもよい。また、運転者への通知は入力が乗員監視装置11によって検出されるまで継続されるように構成してもよい。
実行中のレベルの自動運転を行う条件が満たされないときには、車両が現在実行中のレベルよりも低いレベルの自動運転のみが実行可能な領域に移動したときや、異常状態判定部36が運転者又は車両に自動運転を継続するために困難な異常が発生したと判定したときが含まれる。
運転者への通知の後、状態管理部37は室内カメラ26又は把持センサ27に運転者から運転への介入を示す入力があったかを検出する。入力の有無の検出方法は移行後のレベルに依存して定められる。レベル2に移行するときには、状態管理部37は室内カメラ26によって取得された画像から運転者の視線方向を抽出し、運転者の視線が車両の前方を向いている場合に、運転者から運転への介入を示す入力があったと判定する。レベル1又はレベル0に移行するときには、状態管理部37は把持センサ27によって運転者のステアリングホイールの把持を検出したときに運転への介入を示す入力があったと判定する。すなわち、室内カメラ26及び把持センサ27は運転者からの運転への介入を検知する介入検知装置として機能する。また、状態管理部37は自動運転レベル切替スイッチ13への入力に基づいて、運転への介入を示す入力があったかを検出してもよい。
状態管理部37は介入要求処理の開始から所定の時間内に、運転への介入を示す入力が検出された場合に、レベルを下降させる。このとき、下降後の自動運転のレベルはレベル0であってもよく、実行可能な範囲で最も高いレベルであってもよい。
状態管理部37は、介入要求処理の実行から所定の時間内に運転者の運転への介入に応じた入力が検出されなかった場合に、行動計画部42に停車イベントを生成させる。停車イベントは、車両制御を縮退させつつ、車両を安全な位置(例えば、非常駐車帯、路側帯、路肩、パーキングエリア等)に停車させるイベントである。ここでは、この停車イベントにおいて実行される一連の手順をMRM(Minimal Risk Maneuver)という。
停車イベントが生成されると、制御装置15は自動運転モードから自動停車モードに移行し、行動計画部42が停車処理を実行する。以下、図2を参照して、停車処理の概要を説明する。
停車処理では最初に報知処理が実行される(ST1)。報知処理では、行動計画部42は車外報知装置14を作動させて車外への報知を行なう。例えば、行動計画部42は車外報知装置14に含まれるホーンを作動させ、周期的に警告音を発生させる。報知処理は停車処理が終了するまで継続する。行動計画部42は報知処理が終了した後、状況に応じてホーンを作動させ、警告音を発生させ続けてもよい。
次に、縮退処理が実行される(ST2)。縮退処理は、行動計画部42が生成可能なイベントを制限する処理である。縮退処理は、例えば、追い越し車線への車線変更イベントや、追い越しイベント、合流イベント等の生成を禁止する。また、縮退処理は、各種イベントにおいて、停車処理を実行していない場合に比べて車両の上限速度及び上限加速度を制限してもよい。
次に、停車領域決定処理が実行される(ST3)。停車領域決定処理は、自車位置に基づいて地図情報を参照し、自車の走行方向における路肩や退避スペース等の停車に適した領域である停車領域を複数抽出する。そして、停車領域の大きさや停車領域と自車位置との距離等に基づいて、複数の停車領域から1つの停車領域を選択する。
次に、移動処理が実行される(ST4)。移動処理では、停車領域に到達するための経路を決定し、経路を走行するための各種イベントを生成すると共に、目標軌道を決定する。走行制御部38は行動計画部42によって決定された目標軌道に基づいて推進装置3、ブレーキ装置4、及びステアリング装置5を制御する。これにより、車両は経路に沿って走行して停車領域に達する。
次に、停車位置決定処理が実行される(ST5)。停車位置決定処理では外界認識部40によって認識された車両の周辺に位置する障害物や、道路標示等に基づいて、停車位置を決定する。なお、停車位置決定処理では周辺車両や障害物の存在によって、停車領域内に停車位置を決定できない場合がある。停車位置決定処理において停車位置を決定することができない場合(ST6の判定がNo)には、停車領域決定処理(ST3)、移動処理(ST4)、及び停車位置決定処理(ST5)を順に繰り返す。
停車位置決定処理において停車位置を決定することができた場合(ST6の判定がYes)には、停車実行処理が実行される(ST7)。行動計画部42は、停車実行処理において、車両の現在地と、停車位置とに基づいて、目標軌道を生成する。走行制御部38は行動計画部42によって決定された目標軌道に基づいて推進装置3、ブレーキ装置4、及びステアリング装置5を制御する。これにより、車両は停車位置に向かって移動し、停車位置に停止する。
停車実行処理が実行された後に停車維持処理が実行される(ST8)。停車維持処理において、走行制御部38は行動計画部42からの指令に応じてパーキングブレーキ装置を駆動させ、車両を停車位置に維持させる。その後、行動計画部42は、通信装置8によって緊急通報を緊急通報センタに送信してもよい。停車維持処理が完了すると、停車処理が終了する。
本実施形態では、車両制御システム1は少なくとも、制御装置15と、介入検知装置(26、27)と、車外報知装置14とを備え、運転者の介入不能状態を前照灯の照射態様の切り替えによって車外に報知する。これを実現するために、図3に示すように、車外報知装置14は、ハザードランプ14aと、ホーン14cと、前照灯14eと、尾灯14gとを備える。制御装置15は、車外報知装置14を制御するための車外報知制御部64を含む。
ハザードランプ14aは車両前面に設けられた左右一対の光源と、車両背面に設けられた左右一対の光源とを含む。車外報知制御部64は、行動計画部42からの信号に基づいて車両の前面及び背面に設けられた各光源に印加する電圧を制御し、各光源の点灯及び消灯を制御することができる。
ホーン14cは、音により周囲に対して危険を警告するために設けられた音具である。車外報知制御部64は、行動計画部42からの信号に基づいてホーン14cに印加する電圧を制御して、ホーン14cの警告音を発生及び停止させるように制御することができる。
前照灯14eは、第1光源群61及び第2光源群62を有する。第1光源群61は車両前面に設けられた左右1対以上の第1光源61eを含む。第1光源61eの照射距離(点灯時の照射距離)は互いに等しい。第2光源群62は車両前面に設けられた左右1対以上の第2光源62eを含む。第2光源62eの照射距離もまた互いに等しい。第1光源61eの照射距離は第2光源62eの照射距離よりも短い。本実施形態では、第1光源61eの照射距離は40mに、第2光源62eの照射距離は100mにそれぞれ設定されている。また、第1光源61e及び第2光源62eは、LED素子又はハロゲンランプであることが好ましい。
車外報知制御部64は、行動計画部42からの信号に基づいて第1光源61e、及び第2光源62eのそれぞれに加える電圧を制御して、第1光源群61及び第2光源群62それぞれの点灯及び消灯を制御することができる。車外報知制御部64は、前照灯14eを、第1光源群61及び第2光源群62のすべての光源(61e、62e)が消灯した消灯状態と、第1の状態及び第2の状態を含む点灯状態とに切り替え可能である。第1の状態は、第1光源61eのすべてが点灯し、且つ第2光源62eのすべてが消灯した状態である。第2の状態は、第1光源61eのすべてが消灯し、且つ第2光源62eのすべてが点灯した状態である。前照灯14eが第1の状態にあるとき、その照射距離は40mとなり、前照灯14eはすれ違い用前照灯として機能する。一方、前照灯14eが第2の状態にあるとき、その照射距離は100mとなり、前照灯14eは走行用前照灯として機能する。前照灯14eの照射態様を第1の状態と第2の状態とで切り替えると、照射距離が変更され、実効的に照射方向が変更される。
尾灯14gは、車両背面に設けられた左右一対の光源を含む。車外報知制御部64は、行動計画部42からの信号に基づいて車両の前面及び背面に設けられた各光源に印加する電圧を制御し、各光源の点灯及び消灯を制御することができる。車外報知制御部64は、尾灯14gを前照灯14eに連動させて点灯及び消灯する。
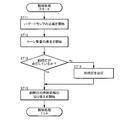
次に、車外報知装置14を作動させて車外への報知を行なう報知処理について図4を参照して詳細に説明する。報知処理の最初のステップST11において、行動計画部42は車外報知制御部64にハザードランプ14aの点滅を開始し、終了を指示する信号を受信するまで点滅を継続するように指示する信号を送信する。行動計画部42は信号の送信が完了すると、ステップST12を実行する。
ステップST12において、行動計画部42はホーン14cの警告音の発生を開始し、終了を指示する信号を受信するまで周期的に鳴らし続けるように指示する信号を車外報知制御部64に送信する。行動計画部42は、信号の送信が完了すると、ステップST13を実行する。
ステップST13において、行動計画部42は前照灯14eが点灯状態(すなわち、第1の状態又は第2の状態)であるか否かを判定する。前照灯14eが点灯状態であるとき、尾灯14gも同様に点灯状態である。行動計画部42は、前照灯14eが点灯状態でない場合にはステップST14を実行し、前照灯14eが点灯状態である場合にはステップST15を実行する。
ステップST14において、行動計画部42は前照灯14eを点灯するように指示する信号を車外報知制御部64に送信する。このとき、行動計画部42は車外報知制御部64に前照灯14eを第2の状態に設定するように指示するとよい。前照灯14eを点灯させるとともに、行動計画部42は車外報知制御部64に尾灯14gを点灯するように指示する。行動計画部42は、信号の送信が完了すると、ステップST15を実行する。
ステップST15において、行動計画部42は前照灯14eを第1の状態と第2の状態とで周期的に切り替え、終了を指示する信号を受信するまで切り替えを繰り返すように指示する信号を車外報知制御部64に送信する。信号の送信が完了すると、行動計画部42は報知処理を終える。
報知処理の終了後、図2のST2〜ST8の処理が実行され、停車維持処理において前照灯14eの照射態様の切り替えの終了を指示する信号が行動計画部42によって送信され、車外報知制御部64によって受信されるまで、切り替えは繰り返し実行される。報知の終了を指示する信号は、ドアに、その開閉を感知する開閉センサを設け、車両が停止した後、行動計画部42が開閉センサによってドアが開かれたことを検知されたとき、送信されるとよい。別の実施例では、車両の停車後、所定の時間が経過した後に送信されてもよい。
次に、このように構成した車両制御システム1の動作、及び効果について説明する。
本実施形態に係る車両制御システム1では、第1光源群161に含まれる第1光源161eと第2光源群162に含まれる第2光源162eとを交互に点滅させることによって、前照灯14eを第1の状態と第2の状態とで周期的に切り替える。
暗所や夜間に車両を走行させるとき、運転者は前照灯14eをより照射距離の長い第2の状態とし、走行用前照灯として使用する。また、他の車両とすれ違うとき、運転者は前照灯14eの照射方向を第2の状態から下げて、照射距離の短い第1の状態とし、すれ違い用前照灯として使用する。本実施形態では、停車処理において前照灯14eの第2の状態から第1の状態への切り替えは、他の車両とすれ違うか否かに関わらず行われる。よって、停車処理における前照灯14eの点灯の態様が通常の点灯の態様とは異なる。これにより、運転者の介入不能な異常状態を検知したときに、介入不能状況を歩行者や周辺車両の乗員により確実に理解させることができる。
更に本実施形態では、停車処理において、車両の尾灯14gを点灯させる。これにより運転者の介入不能状況が後続車両の乗員によっても理解され易くなる。
また本実施形態では、2つの照射態様の切り替えによって周囲に異常を理解させることができる。よって、3つ以上の照射態様の間で切り替えを行う場合に比べて、制御装置15の構成が簡素になる。
<<第2実施形態>>
図1に示すように、第2実施形態に係る車両制御システム101は、第1実施形態の車両制御システム1に対して、車外報知制御部64によって制御される前照灯14eの第1の状態及び第2の状態の点灯態様において異なり、他の部分については第1実施形態と同様である。以下では、第1の状態及び第2の状態の点灯態様について詳細に説明し、他の部分については説明を省略する。また、説明にあたって、第1実施形態と共通する構成については同一の符号を付しその説明を省略する。
図1に示すように、第2実施形態に係る車両制御システム101は、第1実施形態の車両制御システム1に対して、車外報知制御部64によって制御される前照灯14eの第1の状態及び第2の状態の点灯態様において異なり、他の部分については第1実施形態と同様である。以下では、第1の状態及び第2の状態の点灯態様について詳細に説明し、他の部分については説明を省略する。また、説明にあたって、第1実施形態と共通する構成については同一の符号を付しその説明を省略する。
車外報知制御部64は、前照灯14eを少なくとも、第1光源群161のすべての第1光源161eが点灯し、且つ第2光源群162のすべての第2光源162eが消灯した第1の状態と、第1光源群161及び第2光源群162のすべての光源(161e、162e)が点灯した第2の状態とに切り替えることができる。前照灯14eが第1の状態にあるとき、その照射距離は40mとなり、前照灯14eはすれ違い用前照灯として機能する。一方、前照灯14eが第2の状態にあるとき、その照射距離は100mとなり、前照灯14eは走行用前照灯として機能する。前照灯14eを第2の状態と第1の状態との間で切り替えるときには、第1光源161eはすべて点灯した状態で維持される。これにより、第1光源161eには点灯までに時間を要するものの、より輝度の高い光源(たとえば、HIDランプなど)を用いることができる。本実施形態では、第1光源161eはLED素子やハロゲンランプで構成されている。第1光源161eはそのほか、点灯までに時間を要する光源、たとえばHIDランプであってもよい。
次に、このように構成した車両制御システム101の動作、及び効果について説明する。
本実施形態に係る車両制御システム101では、第1光源群161に含まれる全ての第1光源161eを点灯させた状態で、第2光源群162に含まれる全ての第2光源162eを点滅させることによって、前照灯14eを第1の状態と第2の状態とで周期的に切り替える。すなわち、停車処理において、前照灯14eの照射態様の切り替えが行われるときに、第1光源161eは消灯されることなく、点灯した状態が維持される。
これにより、前照灯14eの第1光源161eは、照射態様の切り替えが実行されている間、点灯し続ける。したがって、第1光源161eには、たとえばHIDランプなどの、点灯までに時間を要する光源を利用することができる。
<<第3実施形態>>
第3実施形態に係る車両制御システム201は、第1実施形態の車両制御システム1に比べて、前照灯14eの光源の方向を切り替えることによって、第1の状態と第2の状態との間で切り替えが行われる点において異なる。更に、前照灯14eの構成において異なる。以下では、前照灯14eの構成及び照射態様について詳細に説明し、他の部分については説明を省略する。また、説明にあたって、第1実施形態と共通する構成については同一の符号を付しその説明を省略する。
第3実施形態に係る車両制御システム201は、第1実施形態の車両制御システム1に比べて、前照灯14eの光源の方向を切り替えることによって、第1の状態と第2の状態との間で切り替えが行われる点において異なる。更に、前照灯14eの構成において異なる。以下では、前照灯14eの構成及び照射態様について詳細に説明し、他の部分については説明を省略する。また、説明にあたって、第1実施形態と共通する構成については同一の符号を付しその説明を省略する。
前照灯14eは、本実施形態では第1光源群61を有しておらず、第2光源群262は、車両前面に設けられた左右1対以上の第2光源262eを含む。第2光源262eは、左右方向を軸線として回転可能に車体前部に支持されているとよい。第2光源262eは、その照射方向が、水平方向よりやや下向き前方の第1の状態と、第1の状態のときより上向きに回転された第2の状態との間で変位可能である。第1の状態、第2の状態における照射距離はそれぞれ第1実施形態と同様である。第2光源262eは、LED素子、HIDランプ、又はハロゲンランプであってもよい。
車外報知制御部64は行動計画部42からの信号に基づいて第2光源262eに印加する電圧を制御して、第2光源262eの点灯及び消灯と、照射方向とを制御することができる。車外報知制御部64は前照灯14eを少なくとも、第1の状態と、第2の状態とで切り替えることができる。前照灯14eが第1の状態にあるとき、その照射距離は40mとなり、前照灯14eはすれ違い用前照灯として機能する。一方、前照灯14eが第2の状態にあるとき、その照射距離は100mとなり、前照灯14eは走行用前照灯として機能する。
次に、このように構成した車両制御システム201の動作、及び効果について説明する。
本実施形態に係る車両制御システム201では、第2光源262eを点灯させた状態で照射方向を変位させることによって、前照灯14eを第1の状態と第2の状態とで周期的に切り替える。
これにより、切り替えがその照射方向の変更によって行われるため、第2光源262eを消灯させる必要がない。よって、輝度が高いが、点灯までに時間を要する光源を第2光源262eに利用することができる。これにより、より強い光を周囲に照射することが可能になるため、前照灯14eの照射態様の切り替えが、周囲の歩行者や周辺車両の乗員によって認識されやすくなる。
<<第4実施形態>>
第4実施形態に係る車両制御システム301は、第1実施形態の車両制御システム1に比べて、乗員監視装置11を含み、報知処理におけるステップST12の実行後にステップST21を実行する点において異なり、他の部分については第1実施形態と同様である。以下では、ステップST21について詳細に説明し、他の部分については説明を省略する。また、説明にあたって、第1実施形態と共通する構成については同一の符号を付しその説明を省略する。
第4実施形態に係る車両制御システム301は、第1実施形態の車両制御システム1に比べて、乗員監視装置11を含み、報知処理におけるステップST12の実行後にステップST21を実行する点において異なり、他の部分については第1実施形態と同様である。以下では、ステップST21について詳細に説明し、他の部分については説明を省略する。また、説明にあたって、第1実施形態と共通する構成については同一の符号を付しその説明を省略する。
図5に示すように、ステップST21において、行動計画部42は乗員監視装置11の監視結果を取得し、取得した監視結果に基づいて運転者の健康状態が正常であるかを判定する。より具体的には、行動計画部42は心拍センサによって測定された測定結果に対し、心拍数が所定の基準値内であるときに運転者の健康状態が正常であると判断する。基準値は、60〜90bpmであるとよい。行動計画部42は、運転者の健康状態が正常でないと判定された場合にはステップST13を実行し、運転者の健康状態が正常であると判定された場合にはその後のステップST13〜ステップST15をスキップして報知処理を終了する。すなわち前照灯14eの照射態様の切り替えを禁止する。
別の実施例では、ステップST21において、行動計画部42は、室内カメラ26によって撮像された画像に基づいて、運転者の健康状態の判定を行ってもよい。より具体的には、行動計画部42は撮像された画像に公知の画像解析を行うことによって、たとえば、運転者の瞼が閉じられた状態が所定時間以上維持されていると判定したときに、運転者の健康状態が異常であると判定するとよい。
次に、このように構成した車両制御システム301の動作、及び効果について説明する。
本実施形態に係る車両制御システム301では、運転操作及び車両周辺監視への運転者の介入が不能であると判定された場合であっても、乗員監視装置11による監視結果に基づいて運転者の健康状態が正常であると判定されたときには、その後に開始される前照灯14eによる報知を規制する。
運転者の健康状態が正常でありながら介入が行われなかった場合には、運転者は自力で退避可能である。この構成によれば、前照灯14eの照射態様の切り替えが禁止されるため、運転者の健康状態に問題がなく緊急性を要しない場合には、周囲の歩行者及び車両の乗員に不快感をもたらすことを防ぐことができる。
以上で具体的実施形態の説明を終えるが、本発明は上記実施形態に限定されることなく幅広く変形実施することができる。上記第3実施形態では、第2光源262eは、左右方向を軸線として回転可能に車体前部に支持されていたが、この態様には限定されない。たとえば、第2光源262eは、照射方向を水平方向よりやや下向き前方と、それより上向きとの少なくとも2方向に変位させることができる反射板を有し、反射板が車外報知制御部64によって制御される構成であってもよい。
また、上記実施形態では、尾灯14gは前照灯14eの点灯及び消灯に連動して点灯及び消灯されるように構成されていたが、この態様には限定されない。たとえば、尾灯14gは、他の光源と連動することなく行動計画部42によって点灯・消灯を制御され得る構成であってもよい。
また、上記実施形態では、前照灯14eの点灯・消灯が周期的に切り替えられるように構成されていたが、この態様には限定されない。前照灯14eの点灯・消灯によって、たとえば、モールス信号と同様に、外部に情報を通知するように構成してもよい。このように構成することによって、たとえば通信装置8が故障したときに、車外に異常の内容を通知することができる。
更に、上記実施形態では、停車処理の開始をトリガとして前照灯14eを点灯させ、照射態様の切り替えを行うように構成されていたが、この態様には限定されない。たとえば、車両が停車位置に停止した後、すなわち、停車維持処理が開始された後に、行動計画部42が前照灯14eを点灯させ、照射態様の切り替えを開始する構成であってもよい。
また、上記実施形態では照射態様を変更するライトとして前照灯14eの切り替えが行われていたが、更に、室内灯等の点灯・消灯等が行われる構成であってもよい。
1 :第1実施形態に係る車両制御システム
14 :車外報知装置
14e :前照灯
14g :尾灯
15 :制御装置
26 :室内カメラ(介入検知装置)
27 :把持センサ(介入検知装置)
61e :第1光源
62e :第2光源
101 :第2実施形態に係る車両制御システム
161e :第1光源
162e :第2光源
201 :第3実施形態に係る車両制御システム
262e :第2光源
301 :第4実施形態に係る車両制御システム
14 :車外報知装置
14e :前照灯
14g :尾灯
15 :制御装置
26 :室内カメラ(介入検知装置)
27 :把持センサ(介入検知装置)
61e :第1光源
62e :第2光源
101 :第2実施形態に係る車両制御システム
161e :第1光源
162e :第2光源
201 :第3実施形態に係る車両制御システム
262e :第2光源
301 :第4実施形態に係る車両制御システム
Claims (7)
- 車両制御システムであって、
車両の操舵、加速、及び減速を行う制御装置と、
車外に光によって報知する車外報知装置と、
運転者の運転への介入を検知する介入検知装置とを有し、
前記制御装置は、前記車両の走行中に前記制御装置又は前記運転者による前記車両の走行の継続が困難である所定の条件が満たされたときに、前記車両を所定の停車領域内に停止させる停車処理を実行し、
前記車外報知装置は前照灯を含み、
前記制御装置は、前記停車処理において前記前照灯の照射態様の切り替えを繰り返し実行することを特徴とする車両制御システム。 - 前記前照灯は、照射距離の異なる第1の状態と第2の状態とに変更可能に構成され、
前記制御装置は、前記前照灯を前記第1の状態と前記第2の状態とに変更させることにより、前記照射態様の前記切り替えを繰り返し実行することを特徴とする請求項1に記載の車両制御システム。 - 前記前照灯は照射距離の異なる第1光源と第2光源とを含み、
前記第1の状態のときに前記第1光源が点灯し、かつ前記第2光源が消灯し、前記第2の状態のときに前記第1光源が消灯し、かつ前記第2光源が点灯することを特徴とする請求項2に記載の車両制御システム。 - 前記前照灯は照射距離の異なる第1光源と第2光源とを含み、
前記第1の状態のときに前記第1光源が点灯し、かつ前記第2光源が消灯し、前記第2の状態のときに前記第1光源及び前記第2光源が点灯することを特徴とする請求項2に記載の車両制御システム。 - 前記前照灯は照射方向を少なくとも2方向に変位可能に設けられた光源を含み、
前記第1の状態のときに前記光源が水平方向より下向き前方に照射され、前記第2の状態のときに前記光源が前記第1の状態のときより上向きに照射されることを特徴とする請求項2に記載の車両制御システム。 - 車室内の乗員の状態を監視する乗員監視装置を更に有し、
前記制御装置は、前記乗員監視装置による監視結果に基づいて、前記運転者の健康状態が正常であると判定したときに、前記前照灯の前記照射態様の前記切り替えを禁止することを特徴とする請求項1〜5のいずれか1項に記載の車両制御システム。 - 前記車外報知装置は尾灯を更に含み、
前記制御装置は、前記停車処理において前記前照灯を点灯させ、かつ前記尾灯を点灯させることを特徴とする請求項1〜6のいずれか1項に記載の車両制御システム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019067801A JP2020164085A (ja) | 2019-03-29 | 2019-03-29 | 車両制御システム |
| CN202010223401.9A CN111746532A (zh) | 2019-03-29 | 2020-03-26 | 车辆控制系统 |
| US16/831,234 US20200307638A1 (en) | 2019-03-29 | 2020-03-26 | Vehicle control system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019067801A JP2020164085A (ja) | 2019-03-29 | 2019-03-29 | 車両制御システム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2020164085A true JP2020164085A (ja) | 2020-10-08 |
Family
ID=72606469
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019067801A Pending JP2020164085A (ja) | 2019-03-29 | 2019-03-29 | 車両制御システム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20200307638A1 (ja) |
| JP (1) | JP2020164085A (ja) |
| CN (1) | CN111746532A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7445691B2 (ja) | 2022-03-16 | 2024-03-07 | 本田技研工業株式会社 | 制御装置 |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11745733B2 (en) * | 2020-01-27 | 2023-09-05 | Mazda Motor Corporation | Travel control apparatus for vehicle, vehicle controlling method and computer program therefor |
| FR3124629B1 (fr) * | 2021-06-25 | 2024-01-12 | Continental Automotive Gmbh | procédé de prévention de situation à risque pour un véhicule en stationnement |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007091028A (ja) * | 2005-09-28 | 2007-04-12 | Toyota Motor Corp | 車両用警報システム |
| JP2015146087A (ja) * | 2014-02-03 | 2015-08-13 | 有限会社ジロウコレクション | 自動車用警報システム |
| JP6372376B2 (ja) * | 2014-02-10 | 2018-08-15 | 株式会社デンソー | 前照灯制御装置 |
| JP6814153B2 (ja) * | 2015-10-27 | 2021-01-13 | 株式会社小糸製作所 | 車両用照明装置、車両システム及び車両 |
| US20170316533A1 (en) * | 2016-04-29 | 2017-11-02 | GM Global Technology Operations LLC | Personal safety and privacy features for passengers of an autonomous vehicle based transportation system |
| JP6355780B1 (ja) * | 2017-03-08 | 2018-07-11 | 三菱電機株式会社 | 車両退避装置および車両退避方法 |
-
2019
- 2019-03-29 JP JP2019067801A patent/JP2020164085A/ja active Pending
-
2020
- 2020-03-26 CN CN202010223401.9A patent/CN111746532A/zh not_active Withdrawn
- 2020-03-26 US US16/831,234 patent/US20200307638A1/en not_active Abandoned
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7445691B2 (ja) | 2022-03-16 | 2024-03-07 | 本田技研工業株式会社 | 制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN111746532A (zh) | 2020-10-09 |
| US20200307638A1 (en) | 2020-10-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7121681B2 (ja) | 車両制御システム | |
| JP7104651B2 (ja) | 車両制御システム | |
| JP6937335B2 (ja) | 車両制御システム | |
| JP7090576B2 (ja) | 車両制御システム | |
| JP2020158047A (ja) | 車両制御システム | |
| JP7168509B2 (ja) | 車両制御システム | |
| JP7075908B2 (ja) | 車両制御システム | |
| JP6917406B2 (ja) | 車両制御システム | |
| JP7165093B2 (ja) | 車両制御システム | |
| US11180163B2 (en) | Vehicle control system | |
| JP7198142B2 (ja) | 車両制御システム | |
| US20200307638A1 (en) | Vehicle control system | |
| JP2020163986A (ja) | 車両制御システム | |
| JP7145805B2 (ja) | 車両制御システム | |
| US11312396B2 (en) | Vehicle control system | |
| JP7184694B2 (ja) | 車両制御システム | |
| JP7144351B2 (ja) | 車両制御システム |