JP2020161908A - 振動デバイス、発振器、電子機器および移動体 - Google Patents
振動デバイス、発振器、電子機器および移動体 Download PDFInfo
- Publication number
- JP2020161908A JP2020161908A JP2019057428A JP2019057428A JP2020161908A JP 2020161908 A JP2020161908 A JP 2020161908A JP 2019057428 A JP2019057428 A JP 2019057428A JP 2019057428 A JP2019057428 A JP 2019057428A JP 2020161908 A JP2020161908 A JP 2020161908A
- Authority
- JP
- Japan
- Prior art keywords
- substrate
- terminal
- joining member
- oscillator
- vibrating
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 239000000758 substrate Substances 0.000 claims abstract description 173
- 230000005284 excitation Effects 0.000 claims abstract description 32
- 239000013078 crystal Substances 0.000 claims description 42
- 230000010355 oscillation Effects 0.000 claims description 29
- 239000010453 quartz Substances 0.000 claims description 15
- VYPSYNLAJGMNEJ-UHFFFAOYSA-N silicon dioxide Inorganic materials O=[Si]=O VYPSYNLAJGMNEJ-UHFFFAOYSA-N 0.000 claims description 15
- 238000010586 diagram Methods 0.000 abstract description 2
- 230000001747 exhibiting effect Effects 0.000 abstract 1
- 230000035882 stress Effects 0.000 description 13
- 230000000694 effects Effects 0.000 description 11
- 239000000463 material Substances 0.000 description 10
- 239000000470 constituent Substances 0.000 description 6
- 239000000853 adhesive Substances 0.000 description 5
- 230000001070 adhesive effect Effects 0.000 description 5
- 230000006866 deterioration Effects 0.000 description 5
- 230000006870 function Effects 0.000 description 5
- XLOMVQKBTHCTTD-UHFFFAOYSA-N Zinc monoxide Chemical compound [Zn]=O XLOMVQKBTHCTTD-UHFFFAOYSA-N 0.000 description 4
- NJPPVKZQTLUDBO-UHFFFAOYSA-N novaluron Chemical compound C1=C(Cl)C(OC(F)(F)C(OC(F)(F)F)F)=CC=C1NC(=O)NC(=O)C1=C(F)C=CC=C1F NJPPVKZQTLUDBO-UHFFFAOYSA-N 0.000 description 4
- 230000008646 thermal stress Effects 0.000 description 4
- IJGRMHOSHXDMSA-UHFFFAOYSA-N Atomic nitrogen Chemical compound N#N IJGRMHOSHXDMSA-UHFFFAOYSA-N 0.000 description 2
- 239000004593 Epoxy Substances 0.000 description 2
- GYHNNYVSQQEPJS-UHFFFAOYSA-N Gallium Chemical compound [Ga] GYHNNYVSQQEPJS-UHFFFAOYSA-N 0.000 description 2
- 239000004642 Polyimide Substances 0.000 description 2
- BQCADISMDOOEFD-UHFFFAOYSA-N Silver Chemical compound [Ag] BQCADISMDOOEFD-UHFFFAOYSA-N 0.000 description 2
- 238000010521 absorption reaction Methods 0.000 description 2
- NIXOWILDQLNWCW-UHFFFAOYSA-N acrylic acid group Chemical group C(C=C)(=O)O NIXOWILDQLNWCW-UHFFFAOYSA-N 0.000 description 2
- 229910052733 gallium Inorganic materials 0.000 description 2
- 229910052451 lead zirconate titanate Inorganic materials 0.000 description 2
- GQYHUHYESMUTHG-UHFFFAOYSA-N lithium niobate Chemical compound [Li+].[O-][Nb](=O)=O GQYHUHYESMUTHG-UHFFFAOYSA-N 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 229920001721 polyimide Polymers 0.000 description 2
- 229920001296 polysiloxane Polymers 0.000 description 2
- 229910052709 silver Inorganic materials 0.000 description 2
- 239000004332 silver Substances 0.000 description 2
- UYLYBEXRJGPQSH-UHFFFAOYSA-N sodium;oxido(dioxo)niobium Chemical compound [Na+].[O-][Nb](=O)=O UYLYBEXRJGPQSH-UHFFFAOYSA-N 0.000 description 2
- 229910052727 yttrium Inorganic materials 0.000 description 2
- 239000011787 zinc oxide Substances 0.000 description 2
- 241000251468 Actinopterygii Species 0.000 description 1
- PIGFYZPCRLYGLF-UHFFFAOYSA-N Aluminum nitride Chemical compound [Al]#N PIGFYZPCRLYGLF-UHFFFAOYSA-N 0.000 description 1
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 1
- 229910001218 Gallium arsenide Inorganic materials 0.000 description 1
- WQZGKKKJIJFFOK-GASJEMHNSA-N Glucose Natural products OC[C@H]1OC(O)[C@H](O)[C@@H](O)[C@@H]1O WQZGKKKJIJFFOK-GASJEMHNSA-N 0.000 description 1
- 229910013641 LiNbO 3 Inorganic materials 0.000 description 1
- WHXSMMKQMYFTQS-UHFFFAOYSA-N Lithium Chemical compound [Li] WHXSMMKQMYFTQS-UHFFFAOYSA-N 0.000 description 1
- 229910003237 Na0.5Bi0.5TiO3 Inorganic materials 0.000 description 1
- 229910000831 Steel Inorganic materials 0.000 description 1
- PNEYBMLMFCGWSK-UHFFFAOYSA-N aluminium oxide Inorganic materials [O-2].[O-2].[O-2].[Al+3].[Al+3] PNEYBMLMFCGWSK-UHFFFAOYSA-N 0.000 description 1
- 229910002113 barium titanate Inorganic materials 0.000 description 1
- JRPBQTZRNDNNOP-UHFFFAOYSA-N barium titanate Chemical compound [Ba+2].[Ba+2].[O-][Ti]([O-])([O-])[O-] JRPBQTZRNDNNOP-UHFFFAOYSA-N 0.000 description 1
- 229910052797 bismuth Inorganic materials 0.000 description 1
- JCXGWMGPZLAOME-UHFFFAOYSA-N bismuth atom Chemical compound [Bi] JCXGWMGPZLAOME-UHFFFAOYSA-N 0.000 description 1
- 239000008280 blood Substances 0.000 description 1
- 210000004369 blood Anatomy 0.000 description 1
- 230000036772 blood pressure Effects 0.000 description 1
- 239000000919 ceramic Substances 0.000 description 1
- 239000011248 coating agent Substances 0.000 description 1
- 238000000576 coating method Methods 0.000 description 1
- 239000011231 conductive filler Substances 0.000 description 1
- 229910052802 copper Inorganic materials 0.000 description 1
- 239000010949 copper Substances 0.000 description 1
- NKZSPGSOXYXWQA-UHFFFAOYSA-N dioxido(oxo)titanium;lead(2+) Chemical compound [Pb+2].[O-][Ti]([O-])=O NKZSPGSOXYXWQA-UHFFFAOYSA-N 0.000 description 1
- 239000000945 filler Substances 0.000 description 1
- 239000008103 glucose Substances 0.000 description 1
- PCHJSUWPFVWCPO-UHFFFAOYSA-N gold Chemical compound [Au] PCHJSUWPFVWCPO-UHFFFAOYSA-N 0.000 description 1
- 229910052737 gold Inorganic materials 0.000 description 1
- 239000010931 gold Substances 0.000 description 1
- 238000003384 imaging method Methods 0.000 description 1
- 239000011261 inert gas Substances 0.000 description 1
- 229910000833 kovar Inorganic materials 0.000 description 1
- HFGPZNIAWCZYJU-UHFFFAOYSA-N lead zirconate titanate Chemical compound [O-2].[O-2].[O-2].[O-2].[O-2].[Ti+4].[Zr+4].[Pb+2] HFGPZNIAWCZYJU-UHFFFAOYSA-N 0.000 description 1
- 229910052744 lithium Inorganic materials 0.000 description 1
- 229910052751 metal Inorganic materials 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 239000007769 metal material Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 229910052757 nitrogen Inorganic materials 0.000 description 1
- BITYAPCSNKJESK-UHFFFAOYSA-N potassiosodium Chemical compound [Na].[K] BITYAPCSNKJESK-UHFFFAOYSA-N 0.000 description 1
- 229910052700 potassium Inorganic materials 0.000 description 1
- UKDIAJWKFXFVFG-UHFFFAOYSA-N potassium;oxido(dioxo)niobium Chemical compound [K+].[O-][Nb](=O)=O UKDIAJWKFXFVFG-UHFFFAOYSA-N 0.000 description 1
- 230000002040 relaxant effect Effects 0.000 description 1
- 239000011347 resin Substances 0.000 description 1
- 229920005989 resin Polymers 0.000 description 1
- 229910052710 silicon Inorganic materials 0.000 description 1
- 239000010703 silicon Substances 0.000 description 1
- 229910052708 sodium Inorganic materials 0.000 description 1
- 239000011734 sodium Substances 0.000 description 1
- 229910000679 solder Inorganic materials 0.000 description 1
- 239000010959 steel Substances 0.000 description 1
- 230000008719 thickening Effects 0.000 description 1
- 239000011701 zinc Substances 0.000 description 1
- 229910000859 α-Fe Inorganic materials 0.000 description 1
Images


Landscapes
- Piezo-Electric Or Mechanical Vibrators, Or Delay Or Filter Circuits (AREA)
- Oscillators With Electromechanical Resonators (AREA)
Abstract
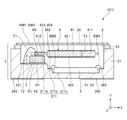
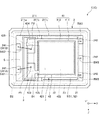
【解決手段】振動デバイスは、第1ベース端子および第2ベース端子を含むベースと、第1接合部材と、前記ベースに前記第1接合部材を介して接合されている中間基板と、第2接合部材と、素子基板、前記素子基板の第1面に配置されている第1励振電極、前記素子基板の第1面と反対の第2面に配置されている第2励振電極、前記第1励振電極と接続されている第1端子および前記第2励振電極と接続されている第2端子を含み、前記中間基板に前記第2接合部材を介して接合されている振動素子と、を備え、前記第1端子と前記第1ベース端子とが第1ワイヤーにより電気的に接続され、前記第2端子と前記第2ベース端子とが第2ワイヤーにより電気的に接続されている。
【選択図】図2
Description
第1接合部材と、
前記ベースに前記第1接合部材を介して接合されている中間基板と、
第2接合部材と、
素子基板、前記素子基板の第1面に配置されている第1励振電極、前記素子基板の第1面と反対の第2面に配置されている第2励振電極、前記第1励振電極と接続されている第1端子および前記第2励振電極と接続されている第2端子を含み、前記中間基板に前記第2接合部材を介して接合されている振動素子と、を備え、
前記第1端子と前記第1ベース端子とが第1ワイヤーにより電気的に接続され、
前記第2端子と前記第2ベース端子とが第2ワイヤーにより電気的に接続されていることを特徴とする。
平面視で、前記第2ワイヤーが前記第2端子に接続されている箇所は、前記第2接合部材と重なっていることが好ましい。
前記中間基板の前記第2接合部材と接合されている部分の厚さをT2としたとき、
T2≧T1であることが好ましい。
T2≧T3であることが好ましい。
前記第1端子および前記第2端子は、前記辺に沿って並んで配置されていることが好ましい。
T3>T1であり、
前記中間基板の前記振動素子側の面は、平面視で、前記第1部分と重なっている第1面と、前記第2部分と重なり、前記第1面に対して前記振動素子とは反対側に位置する第2面と、を有することが好ましい。
前記振動素子と電気的に接続され、発振信号を出力する発振回路と、を備えていることを特徴とする。
前記発振器から出力される発振信号に基づいて動作する演算処理回路と、を備えていることを特徴とする。
前記発振器から出力される発振信号に基づいて動作する演算処理回路と、を備えていることを特徴とする。
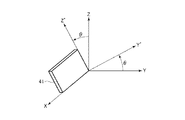
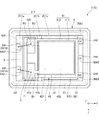
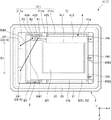
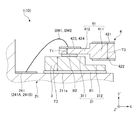
図1は、第1実施形態に係る発振器を示す断面図である。図2は、図1中の発振器を示す平面図である。図3は、ATカットのカット角を示す図である。図4は、図1の発振器の変形例を示す平面図である。なお、各図には、水晶の結晶軸であり、互いに直交するX軸、Y’軸およびZ’軸を示している。また、以下では、X軸に平行な方向を「X軸方向」とも言い、Y’軸に平行な方向を「Y’軸方向」とも言い、Z’軸に平行な方向を「Z’軸方向」とも言う。また、各軸の矢印先端側を「プラス側」とも言い、反対側を「マイナス側」とも言う。また、Y’軸方向からの平面視を単に「平面視」とも言う。
図5は、第2実施形態に係る発振器の平面図である。
図6は、第3実施形態に係る発振器の部分拡大断面図である。
図7は、第4実施形態に係るパーソナルコンピューターを示す斜視図である。
図8は、第5実施形態に係る携帯電話機を示す斜視図である。
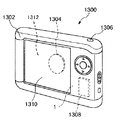
図9は、第6実施形態に係るデジタルスチールカメラを示す斜視図である。
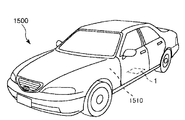
図10は、第7実施形態に係る自動車を示す斜視図である。
Claims (13)
- 第1ベース端子および第2ベース端子を含むベースと、
第1接合部材と、
前記ベースに前記第1接合部材を介して接合されている中間基板と、
第2接合部材と、
素子基板、前記素子基板の第1面に配置されている第1励振電極、前記素子基板の第1面と反対の第2面に配置されている第2励振電極、前記第1励振電極と接続されている第1端子および前記第2励振電極と接続されている第2端子を含み、前記中間基板に前記第2接合部材を介して接合されている振動素子と、を備え、
前記第1端子と前記第1ベース端子とが第1ワイヤーにより電気的に接続され、
前記第2端子と前記第2ベース端子とが第2ワイヤーにより電気的に接続されていることを特徴とする振動デバイス。 - 前記中間基板および前記素子基板は、それぞれ、水晶により構成されている請求項1に記載の振動デバイス。
- 前記中間基板の結晶軸は、前記素子基板の結晶軸に沿っている請求項2に記載の振動デバイス。
- 前記素子基板は、ATカット水晶基板により構成されている請求項2または3に記載の振動デバイス。
- 平面視で、前記第1ワイヤーが前記第1端子に接続されている箇所は、前記第2接合部材と重なっており、
平面視で、前記第2ワイヤーが前記第2端子に接続されている箇所は、前記第2接合部材と重なっている請求項1ないし4のいずれか1項に記載の振動デバイス。 - 平面視で、前記第2接合部材は、前記第1接合部材と重なっている請求項1ないし5のいずれか1項に記載の振動デバイス。
- 前記素子基板の前記第2接合部材と接合されている部分の厚さをT1とし、
前記中間基板の前記第2接合部材と接合されている部分の厚さをT2としたとき、
T2≧T1である請求項1ないし6のいずれか1項に記載の振動デバイス。 - 前記素子基板の前記第1励振電極と前記第2励振電極とに挟まれている部分の厚さをT3としたとき、
T2≧T3である請求項7に記載の振動デバイス。 - 前記素子基板は、ATカット水晶基板により構成され、水晶の結晶軸であるX軸方向に沿う辺を有し、
前記第1端子および前記第2端子は、前記辺に沿って並んで配置されている請求項1ないし3のいずれか1項、または請求項5ないし8のいずれか1項に記載の振動デバイス。 - 前記素子基板の前記第2接合部材と接合されている第1部分の厚さをT1とし、前記素子基板の前記第1励振電極と前記第2励振電極とに挟まれている第2部分の厚さをT3としたとき、
T3>T1であり、
前記中間基板の前記振動素子側の面は、平面視で、前記第1部分と重なっている第1面と、前記第2部分と重なり、前記第1面に対して前記振動素子とは反対側に位置する第2面と、を有する請求項1ないし9のいずれか1項に記載の振動デバイス。 - 請求項1ないし10のいずれか1項に記載の振動デバイスと、
前記振動素子と電気的に接続され、発振信号を出力する発振回路と、を備えていることを特徴とする発振器。 - 請求項11に記載の発振器と、
前記発振器から出力される発振信号に基づいて動作する演算処理回路と、を備えていることを特徴とする電子機器。 - 請求項11に記載の発振器と、
前記発振器から出力される発振信号に基づいて動作する演算処理回路と、を備えていることを特徴とする移動体。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019057428A JP7314562B2 (ja) | 2019-03-25 | 2019-03-25 | 振動デバイス、発振器、電子機器および移動体 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019057428A JP7314562B2 (ja) | 2019-03-25 | 2019-03-25 | 振動デバイス、発振器、電子機器および移動体 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020161908A true JP2020161908A (ja) | 2020-10-01 |
| JP7314562B2 JP7314562B2 (ja) | 2023-07-26 |
Family
ID=72639992
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019057428A Active JP7314562B2 (ja) | 2019-03-25 | 2019-03-25 | 振動デバイス、発振器、電子機器および移動体 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7314562B2 (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113492282A (zh) * | 2021-07-19 | 2021-10-12 | 中国第一汽车股份有限公司 | 一种基于三轴机器人的焊接定位系统 |
| WO2022024880A1 (ja) * | 2020-07-29 | 2022-02-03 | 京セラ株式会社 | 圧電デバイス |
| JP2023045977A (ja) * | 2021-09-22 | 2023-04-03 | 株式会社大真空 | 温度センサ付き水晶振動デバイス |
| JP7743655B1 (ja) | 2024-04-26 | 2025-09-24 | 日本電波工業株式会社 | 温度センサ内蔵型の水晶振動子 |
| JP2025168236A (ja) * | 2024-04-26 | 2025-11-07 | 日本電波工業株式会社 | 水晶振動子 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5081296A (ja) * | 1973-11-16 | 1975-07-01 | ||
| JP2011229123A (ja) * | 2010-03-30 | 2011-11-10 | Nippon Dempa Kogyo Co Ltd | 水晶デバイス及び水晶デバイスの製造方法 |
| JP2013192052A (ja) * | 2012-03-14 | 2013-09-26 | Nippon Dempa Kogyo Co Ltd | 水晶デバイス及びその製造方法。 |
| JP2014033368A (ja) * | 2012-08-03 | 2014-02-20 | Nippon Dempa Kogyo Co Ltd | 電子部品及び発振器 |
| JP2017182147A (ja) * | 2016-03-28 | 2017-10-05 | アルプス電気株式会社 | 操作装置 |
-
2019
- 2019-03-25 JP JP2019057428A patent/JP7314562B2/ja active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5081296A (ja) * | 1973-11-16 | 1975-07-01 | ||
| JP2011229123A (ja) * | 2010-03-30 | 2011-11-10 | Nippon Dempa Kogyo Co Ltd | 水晶デバイス及び水晶デバイスの製造方法 |
| JP2013192052A (ja) * | 2012-03-14 | 2013-09-26 | Nippon Dempa Kogyo Co Ltd | 水晶デバイス及びその製造方法。 |
| JP2014033368A (ja) * | 2012-08-03 | 2014-02-20 | Nippon Dempa Kogyo Co Ltd | 電子部品及び発振器 |
| JP2017182147A (ja) * | 2016-03-28 | 2017-10-05 | アルプス電気株式会社 | 操作装置 |
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022024880A1 (ja) * | 2020-07-29 | 2022-02-03 | 京セラ株式会社 | 圧電デバイス |
| JP2022025452A (ja) * | 2020-07-29 | 2022-02-10 | 京セラ株式会社 | 圧電デバイス |
| JP7523271B2 (ja) | 2020-07-29 | 2024-07-26 | 京セラ株式会社 | 圧電デバイス |
| US12438478B2 (en) | 2020-07-29 | 2025-10-07 | Kyocera Corporation | Hermetically sealed piezoelectric device with integrated temperature sensor and optimized thermal characteristics |
| CN113492282A (zh) * | 2021-07-19 | 2021-10-12 | 中国第一汽车股份有限公司 | 一种基于三轴机器人的焊接定位系统 |
| CN113492282B (zh) * | 2021-07-19 | 2022-10-25 | 中国第一汽车股份有限公司 | 一种基于三轴机器人的焊接定位系统 |
| JP2023045977A (ja) * | 2021-09-22 | 2023-04-03 | 株式会社大真空 | 温度センサ付き水晶振動デバイス |
| JP7703972B2 (ja) | 2021-09-22 | 2025-07-08 | 株式会社大真空 | 温度センサ付き水晶振動デバイス |
| JP7743655B1 (ja) | 2024-04-26 | 2025-09-24 | 日本電波工業株式会社 | 温度センサ内蔵型の水晶振動子 |
| JP2025168236A (ja) * | 2024-04-26 | 2025-11-07 | 日本電波工業株式会社 | 水晶振動子 |
| JP2025168235A (ja) * | 2024-04-26 | 2025-11-07 | 日本電波工業株式会社 | 温度センサ内蔵型の水晶振動子 |
| JP7780679B2 (ja) | 2024-04-26 | 2025-12-04 | 日本電波工業株式会社 | 水晶振動子 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7314562B2 (ja) | 2023-07-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7314562B2 (ja) | 振動デバイス、発振器、電子機器および移動体 | |
| US10622942B2 (en) | Oscillator, electronic apparatus, and vehicle | |
| JP2018006809A (ja) | 発振器、電子機器および移動体 | |
| US11075613B2 (en) | Vibrator device, electronic apparatus, and vehicle | |
| US11097667B2 (en) | Vibration device, vibration module, electronic apparatus, and vehicle | |
| CN111682847B (zh) | 振动器件、电子设备以及移动体 | |
| US10720886B2 (en) | Oscillator, electronic apparatus, and vehicle | |
| US10797644B2 (en) | Oscillator, electronic apparatus, and vehicle | |
| JP7444233B2 (ja) | 振動デバイスの製造方法 | |
| US10103710B2 (en) | Resonator, oscillator, electronic apparatus, and mobile object | |
| US11009351B2 (en) | Vibrator device including reduced mounting stress and frequency variation | |
| US10536112B2 (en) | Oscillator and electronic apparatus | |
| US11183986B2 (en) | Resonator element, resonator device, electronic apparatus, and vehicle | |
| JP2015046666A (ja) | 振動素子、発振器、センサー、電子機器及び移動体 | |
| JP2019102848A (ja) | 振動デバイス、振動デバイスの製造方法、電子機器および移動体 | |
| US11653571B2 (en) | Resonance device, oscillator, resonance module, electronic device and vehicle | |
| JP2019176224A (ja) | 振動子、発振器、電子機器および移動体 | |
| JP2019114964A (ja) | 振動デバイス、電子機器および移動体 | |
| JP2020141317A (ja) | 振動素子、振動デバイス、発振器、電子機器および移動体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220114 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20221221 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230117 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230317 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230613 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230626 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7314562 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |