JP2020017618A - 基板処理装置および基板処理方法 - Google Patents
基板処理装置および基板処理方法 Download PDFInfo
- Publication number
- JP2020017618A JP2020017618A JP2018139315A JP2018139315A JP2020017618A JP 2020017618 A JP2020017618 A JP 2020017618A JP 2018139315 A JP2018139315 A JP 2018139315A JP 2018139315 A JP2018139315 A JP 2018139315A JP 2020017618 A JP2020017618 A JP 2020017618A
- Authority
- JP
- Japan
- Prior art keywords
- unit
- liquid film
- wafer
- liquid
- substrate
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



Landscapes
- Cleaning Or Drying Semiconductors (AREA)
Abstract
【課題】ウェハ表面に形成される液膜を乾燥処理の際に所定の膜厚で均一にすることができる技術を提供する。【解決手段】本開示の一態様による基板処理装置は、液処理部と、乾燥処理部と、搬送部と、制御部とを備える。液処理部は、基板の上面に液膜を形成する。乾燥処理部は、前記液膜が形成された前記基板を乾燥させる。搬送部は、前記液処理部で処理された前記基板を前記乾燥処理部に搬送する。制御部は、前記搬送部を制御して、前記乾燥処理部に搬入される際の前記液膜が均一になるように調整する。【選択図】図6
Description
開示の実施形態は、基板処理装置および基板処理方法に関する。
従来、基板である半導体ウェハ(以下、ウェハと呼称する。)などの表面に乾燥防止用の液膜を形成し、かかる液膜が形成されたウェハを超臨界状態の処理流体に接触させて乾燥処理を行う基板処理装置が知られている(たとえば、特許文献1参照)。
本開示は、ウェハ表面に形成される液膜を乾燥処理の際に所定の膜厚で均一にすることができる技術を提供する。
本開示の一態様による基板処理装置は、液処理部と、乾燥処理部と、搬送部と、制御部とを備える。液処理部は、基板の上面に液膜を形成する。乾燥処理部は、前記液膜が形成された前記基板を乾燥させる。搬送部は、前記液処理部で処理された前記基板を前記乾燥処理部に搬送する。制御部は、前記搬送部を制御して、前記乾燥処理部に搬入される際の前記液膜が所定の膜厚で均一になるように調整する。
本開示によれば、ウェハ表面に形成される液膜を乾燥処理の際に所定の膜厚で均一にすることができる。
以下、添付図面を参照して、本願の開示する基板処理装置および基板処理方法の実施形態を詳細に説明する。なお、以下に示す実施形態により本開示が限定されるものではない。また、図面は模式的なものであり、各要素の寸法の関係、各要素の比率などは、現実と異なる場合があることに留意する必要がある。さらに、図面の相互間においても、互いの寸法の関係や比率が異なる部分が含まれている場合がある。
従来、基板である半導体ウェハ(以下、ウェハと呼称する。)などの表面に乾燥防止用の液膜を形成し、かかる液膜が形成されたウェハを超臨界状態の処理流体に接触させて乾燥処理を行う基板処理装置が知られている。
しかしながら、ウェハ表面に形成された液膜の膜厚が不均一である場合、乾燥処理したウェハの歩留まりが低下してしまう恐れがあった。なぜなら、液膜が薄い場合、ウェハ上に形成されているパターンが乾燥処理で倒れるなどの不具合(以下、パターン倒れとも呼称する。)が発生する恐れがあり、一方で液膜が厚い場合、乾燥処理でウェハ上にパーティクルが発生する恐れがあるからである。
そこで、ウェハ表面に形成される液膜を乾燥処理の際に所定の膜厚で均一にすることが期待されている。
<基板処理システムの構成>
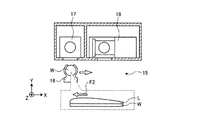
まず、実施形態に係る基板処理システム1(基板処理装置の一例)の構成について図1および図2を参照して説明する。図1は、実施形態に係る基板処理システム1を上方から見た模式的な断面図であり、図2は、実施形態に係る基板処理システム1を側方から見た模式的な断面図である。なお、以下では、位置関係を明確にするために、互いに直交するX軸、Y軸およびZ軸を規定し、Z軸正方向を鉛直上向き方向とする。
まず、実施形態に係る基板処理システム1(基板処理装置の一例)の構成について図1および図2を参照して説明する。図1は、実施形態に係る基板処理システム1を上方から見た模式的な断面図であり、図2は、実施形態に係る基板処理システム1を側方から見た模式的な断面図である。なお、以下では、位置関係を明確にするために、互いに直交するX軸、Y軸およびZ軸を規定し、Z軸正方向を鉛直上向き方向とする。
図1に示すように、基板処理システム1は、搬入出ステーション2と、処理ステーション3とを備える。搬入出ステーション2と処理ステーション3とは隣接して設けられる。
搬入出ステーション2は、キャリア載置部11と、搬送部12とを備える。キャリア載置部11には、複数枚の半導体ウェハW(以下、「ウェハW」と記載する)を水平状態で収容する複数のキャリアCが載置される。
搬送部12は、キャリア載置部11に隣接して設けられる。搬送部12の内部には、搬送装置13と受渡部14とが配置される。
搬送装置13は、ウェハWを保持するウェハ保持機構を備える。また、搬送装置13は、水平方向および鉛直方向への移動ならびに鉛直軸を中心とする旋回が可能であり、ウェハ保持機構を用いてキャリアCと受渡部14との間でウェハWの搬送を行う。
処理ステーション3は、搬送部12に隣接して設けられる。処理ステーション3は、搬送ブロック4と、複数の処理ブロック5とを備える。
搬送ブロック4は、搬送エリア15と、搬送装置16とを備える。搬送エリア15は、たとえば、搬入出ステーション2および処理ステーション3の並び方向(X軸方向)に沿って延在する直方体状の領域である。搬送エリア15には、搬送装置16が配置される。
搬送装置16は、搬送部の一例であり、ウェハWを保持するウェハ保持機構を備える。また、搬送装置16は、水平方向および鉛直方向への移動ならびに鉛直軸を中心とする旋回が可能であり、ウェハ保持機構を用いて受渡部14と複数の処理ブロック5との間でウェハWの搬送を行う。搬送装置16の構成については後述する。
複数の処理ブロック5は、搬送エリア15の両側において搬送エリア15に隣接して配置される。具体的には、複数の処理ブロック5は、搬入出ステーション2および処理ステーション3の並び方向(X軸方向)に直交する方向(Y軸方向)における搬送エリア15の一方側(Y軸正方向側)および他方側(Y軸負方向側)に配置される。
また、図2に示すように、複数の処理ブロック5は、鉛直方向に沿って多段に配置される。実施形態において、複数の処理ブロック5の段数は3段であるが、複数の処理ブロック5の段数は3段に限定されない。
このように、実施形態に係る基板処理システム1において、複数の処理ブロック5は、搬送ブロック4の両側において多段に配置される。そして、各段に配置された処理ブロック5と受渡部14との間のウェハWの搬送は、搬送ブロック4に配置された1台の搬送装置16によって行われる。
各処理ブロック5は、液処理ユニット17と、乾燥ユニット18とを備える。液処理ユニット17は液処理部の一例であり、乾燥ユニット18は乾燥処理部の一例である。
液処理ユニット17は、ウェハWのパターン形成面である上面を洗浄する洗浄処理を行う。また、液処理ユニット17は、洗浄処理後のウェハWの上面に液膜L(図7参照)を形成する液膜形成処理を行う。液処理ユニット17の構成については後述する。
乾燥ユニット18は、液膜形成処理後のウェハWに対して超臨界乾燥処理を行う。具体的には、乾燥ユニット18は、液膜形成処理後のウェハWを超臨界状態の処理流体(以下、「超臨界流体」とも呼称する。)と接触させることによって同ウェハWを乾燥させる。乾燥ユニット18の構成については後述する。
なお、図1および図2には図示していないが、基板処理システム1は、乾燥ユニット18に対して処理流体を供給する供給ユニットを有する。具体的には、かかる供給ユニットは、流量計、流量調整器、背圧弁、ヒータなどを含む供給機器群と、供給機器群を収容する筐体とを備える。実施形態において、供給ユニットは、処理流体としてCO2を乾燥ユニット18に供給する。
液処理ユニット17および乾燥ユニット18は、搬送エリア15に沿って(すなわち、X軸方向に沿って)並べられる。液処理ユニット17および乾燥ユニット18のうち、液処理ユニット17は、搬入出ステーション2に近い位置に配置され、乾燥ユニット18は、搬入出ステーション2から遠い位置に配置される。
このように、各処理ブロック5は、液処理ユニット17および乾燥ユニット18をそれぞれ1つずつ備える。すなわち、基板処理システム1には、液処理ユニット17および乾燥ユニット18が同じ数だけ設けられる。
また、乾燥ユニット18は、超臨界乾燥処理が行われる処理エリア181と、搬送ブロック4と処理エリア181との間でのウェハWの受け渡しが行われる受渡エリア182とを備える。これら処理エリア181および受渡エリア182は、搬送エリア15に沿って並べられる。
具体的には、処理エリア181および受渡エリア182のうち、受渡エリア182は、処理エリア181よりも液処理ユニット17に近い側に配置される。すなわち、各処理ブロック5には、液処理ユニット17、受渡エリア182および処理エリア181が、搬送エリア15に沿ってこの順番で配置される。
図1に示すように、基板処理システム1は、制御装置6を備える。制御装置6は、たとえばコンピュータであり、制御部7と記憶部8とを備える。
制御部7は、CPU(Central Processing Unit)、ROM(Read Only Memory)、RAM(Random Access Memory)、入出力ポートなどを有するマイクロコンピュータや各種の回路を含む。かかるマイクロコンピュータのCPUは、ROMに記憶されているプログラムを読み出して実行することにより、搬送装置13、16、液処理ユニット17および乾燥ユニット18等の制御を実現する。
なお、かかるプログラムは、コンピュータによって読み取り可能な記憶媒体に記憶されていたものであって、その記憶媒体から制御装置6の記憶部8にインストールされたものであってもよい。コンピュータによって読み取り可能な記憶媒体としては、たとえばハードディスク(HD)、フレキシブルディスク(FD)、コンパクトディスク(CD)、マグネットオプティカルディスク(MO)、メモリカードなどがある。
記憶部8は、たとえば、RAM、フラッシュメモリ(Flash Memory)などの半導体メモリ素子、または、ハードディスク、光ディスクなどの記憶装置によって実現される。
上記のように構成された基板処理システム1では、まず、搬入出ステーション2の搬送装置13が、キャリア載置部11に載置されたキャリアCからウェハWを取り出し、取り出したウェハWを受渡部14に載置する。受渡部14に載置されたウェハWは、処理ステーション3の搬送装置16によって受渡部14から取り出されて、液処理ユニット17へ搬入される。
液処理ユニット17へ搬入されたウェハWは、液処理ユニット17によって洗浄処理および液膜形成処理が施された後、搬送装置16によって液処理ユニット17から搬出される。液処理ユニット17から搬出されたウェハWは、搬送装置16によって乾燥ユニット18へ搬入され、乾燥ユニット18によって乾燥処理が施される。
乾燥ユニット18によって乾燥処理されたウェハWは、搬送装置16によって乾燥ユニット18から搬出され、受渡部14に載置される。そして、受渡部14に載置された処理済のウェハWは、搬送装置13によってキャリア載置部11のキャリアCへ戻される。
<液処理ユニットの構成>
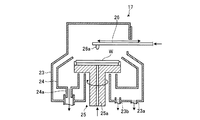
次に、液処理ユニット17の構成について、図3を参照しながら説明する。図3は、液処理ユニット17の構成例を示す図である。液処理ユニット17は、たとえば、スピン洗浄によりウェハWを1枚ずつ洗浄する枚葉式の洗浄装置として構成される。
次に、液処理ユニット17の構成について、図3を参照しながら説明する。図3は、液処理ユニット17の構成例を示す図である。液処理ユニット17は、たとえば、スピン洗浄によりウェハWを1枚ずつ洗浄する枚葉式の洗浄装置として構成される。
図3に示すように、液処理ユニット17は、処理空間を形成するアウターチャンバー23内に配置されたウェハ保持機構25にてウェハWをほぼ水平に保持し、このウェハ保持機構25を鉛直軸周りに回転させることによりウェハWを回転させる。
そして、液処理ユニット17は、回転するウェハWの上方にノズルアーム26を進入させ、かかるノズルアーム26の先端部に設けられる薬液ノズル26aから薬液やリンス液を予め定められた順に供給することにより、ウェハW上面の洗浄処理を行う。
また、液処理ユニット17には、ウェハ保持機構25の内部にも薬液供給路25aが形成されている。そして、かかる薬液供給路25aから供給された薬液やリンス液によって、ウェハWの下面も洗浄される。
洗浄処理は、たとえば、最初にアルカリ性の薬液であるSC1液(アンモニアと過酸化水素水の混合液)によるパーティクルや有機性の汚染物質の除去が行われる。次に、リンス液である脱イオン水(DeIonized Water:以下、「DIW」と記載する)によるリンス洗浄が行われる。
次に、酸性薬液である希フッ酸水溶液(Diluted HydroFluoric acid:以下、「DHF」と記載する)による自然酸化膜の除去が行われ、次に、DIWによるリンス洗浄が行われる。
上述の各種薬液は、アウターチャンバー23や、アウターチャンバー23内に配置されるインナーカップ24に受け止められて、アウターチャンバー23の底部に設けられる排液口23aや、インナーカップ24の底部に設けられる排液口24aから排出される。さらに、アウターチャンバー23内の雰囲気は、アウターチャンバー23の底部に設けられる排気口23bから排気される。
液膜形成処理は、洗浄処理におけるリンス処理の後に行われる。具体的には、液処理ユニット17は、ウェハ保持機構25を回転させながら、ウェハWの上面および下面に液体状態のIPA(Isopropyl Alcohol)(以下、「IPA液体」とも呼称する)を供給する。これにより、ウェハWの両面に残存するDIWがIPAに置換される。その後、液処理ユニット17は、ウェハ保持機構25の回転を緩やかに停止する。
液膜形成処理を終えたウェハWは、その上面にIPA液体の液膜Lが形成された状態のまま、ウェハ保持機構25に設けられた不図示の受け渡し機構により搬送装置16に受け渡され、液処理ユニット17から搬出される。
ウェハW上に形成された液膜Lは、液処理ユニット17から乾燥ユニット18へのウェハWの搬送中や、乾燥ユニット18への搬入動作中に、ウェハW上面の液体が蒸発(気化)することによってパターン倒れが発生することを防止する。
<乾燥ユニットの構成>
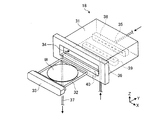
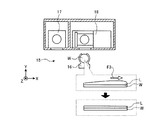
つづいて、乾燥ユニット18の構成について、図4を参照しながら説明する。図4は、乾燥ユニット18の構成例を示す模式斜視図である。
つづいて、乾燥ユニット18の構成について、図4を参照しながら説明する。図4は、乾燥ユニット18の構成例を示す模式斜視図である。
乾燥ユニット18は、本体31と、保持板32と、蓋部材33とを有する。筐体状の本体31には、ウェハWを搬入出するための開口部34が形成される。保持板32は、処理対象のウェハWを水平方向に保持する。蓋部材33は、かかる保持板32を支持するとともに、ウェハWを本体31内に搬入したときに、開口部34を密閉する。
本体31は、たとえば直径300mmのウェハWを収容可能な処理空間が内部に形成された容器であり、その壁部には、供給ポート35、36と排出ポート37とが設けられる。供給ポート35、36および排出ポート37は、それぞれ、乾燥ユニット18に超臨界流体を流通させるための供給流路および排出流路に接続されている。
供給ポート35は、筐体状の本体31において、開口部34とは反対側の側面に接続されている。また、供給ポート36は、本体31の底面に接続されている。さらに、排出ポート37は、開口部34の下方側に接続されている。なお、図4には2つの供給ポート35、36と1つの排出ポート37が図示されているが、供給ポート35、36や排出ポート37の数は特に限定されない。
また、本体31の内部には、流体供給ヘッダー38、39と、流体排出ヘッダー40とが設けられる。そして、流体供給ヘッダー38、39には複数の供給口がかかる流体供給ヘッダー38,39の長手方向に並んで形成され、流体排出ヘッダー40には複数の排出口がかかる流体排出ヘッダー40の長手方向に並んで形成される。
流体供給ヘッダー38は、供給ポート35に接続され、筐体状の本体31内部において、開口部34とは反対側の側面に隣接して設けられる。また、流体供給ヘッダー38に並んで形成される複数の供給口は、開口部34側を向いている。
流体供給ヘッダー39は、供給ポート36に接続され、筐体状の本体31内部における底面の中央部に設けられる。また、流体供給ヘッダー39に並んで形成される複数の供給口は、上方を向いている。
流体排出ヘッダー40は、排出ポート37に接続され、筐体状の本体31内部において、開口部34側の側面に隣接するとともに、開口部34より下方に設けられる。また、流体排出ヘッダー40に並んで形成される複数の排出口は、上方を向いている。
流体供給ヘッダー38、39は、超臨界流体を本体31内に供給する。また、流体排出ヘッダー40は、本体31内の超臨界流体を本体31の外部に導いて排出する。なお、流体排出ヘッダー40を介して本体31の外部に排出される超臨界流体には、ウェハWの表面から超臨界状態の超臨界流体に溶け込んだIPA液体が含まれる。
かかる乾燥ユニット18内において、ウェハW上に形成されているパターンの間のIPA液体は、高圧状態(たとえば、16MPa)である超臨界流体と接触することで、徐々に超臨界流体に溶解し、パターンの間は徐々に超臨界流体と置き換わる。そして、最終的には、超臨界流体のみによってパターンの間が満たされる。
そして、パターンの間からIPA液体が除去された後に、本体31内部の圧力を高圧状態から大気圧まで減圧することによって、CO2は超臨界状態から気体状態に変化し、パターンの間は気体のみによって占められる。このようにしてパターンの間のIPA液体は除去され、ウェハWの乾燥処理が完了する。
ここで、超臨界流体は、液体(たとえばIPA液体)と比べて粘度が小さく、また液体を溶解する能力も高いことに加え、超臨界流体と平衡状態にある液体や気体との間で界面が存在しない。これにより、超臨界流体を用いた乾燥処理では、表面張力の影響を受けることなく液体を乾燥させることができる。したがって、実施形態によれば、乾燥処理の際にパターンが倒れることを抑制することができる。
なお、実施形態では、乾燥防止用の液体としてIPA液体を用い、処理流体として超臨界状態のCO2を用いた例について示しているが、IPA以外の液体を乾燥防止用の液体として用いてもよいし、超臨界状態のCO2以外の流体を処理流体として用いてもよい。
<搬送装置の構成>
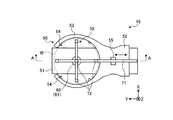
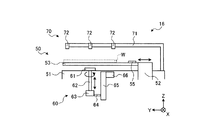
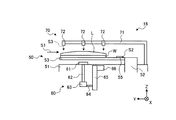
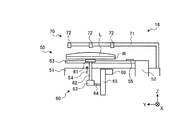
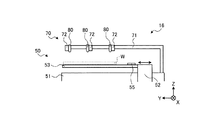
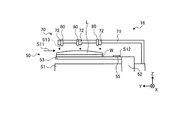
つづいて、搬送装置16の構成について、図5および図6を参照しながら説明する。図5は、搬送装置16の構成例を示す上面図であり、図6は、図5におけるA−A線断面図である。なお、図5および図6は、フォーク53が所定の位置に収容された状態を示している。
つづいて、搬送装置16の構成について、図5および図6を参照しながら説明する。図5は、搬送装置16の構成例を示す上面図であり、図6は、図5におけるA−A線断面図である。なお、図5および図6は、フォーク53が所定の位置に収容された状態を示している。
搬送装置16は、基板保持部50と、回転機構60と、膜厚検知部70とを有する。基板保持部50は、ウェハWを保持する。基板保持部50は、基台51と、進退機構52と、フォーク53と、保持爪54と、重量検知部55とを有する。
基台51は、基板保持部50におけるその他の部位と、回転機構60と、膜厚検知部70とを支持する。基台51は、図示しない移動機構により水平方向および鉛直方向への移動が可能であるとともに、図示しない旋回機構により鉛直軸を中心とする旋回が可能である。
進退機構52は、所定の水平方向(図ではY軸方向)に沿って進退することができる。進退機構52は、たとえば基台51内部の図示しないモータにタイミングベルトなどの伝達機構を介して接続されており、かかるモータを動作させることで所定の水平方向に進退することができる。なお、かかる伝達機構はタイミングベルトに限られず、ボールネジ機構やタイミングベルトを用いた機構など、周知の構成を用いることができる。
フォーク53は、略円弧状に形成され、搬送するウェハWの周囲を囲むように設けられている。また、フォーク53は、進退機構52に支持され、かかる進退機構52と一体で所定の水平方向に進退することができる。
また、フォーク53には、複数の保持爪54が形成されている。かかる複数の保持爪54は、フォーク53の内縁からそれぞれ内側に突出するとともに、フォーク53の内縁に沿って互いに間隔をあけて設けられている。
そして、かかる複数の保持爪54がウェハWの周縁部を保持することにより、フォーク53はウェハWを保持することができる。なお、実施形態では、フォーク53に保持爪54が4つ設けられる例について示しているが、保持爪54の数は4つに限られず、3つ以上の任意の数設けられればよい。
重量検知部55は、たとえば、フォーク53の根元部分に設けられ、フォーク53に載置された物体(たとえば、ウェハW)の重量を検知することができる。重量検知部55は、たとえば歪みセンサである。なお、重量検知部55は歪みセンサに限られず、フォーク53に載置された物体の重量を検知することができるセンサであればどのようなセンサであってもよい。
図6に示すように、回転機構60は、所定の位置に収容されたウェハWの下方に設けられ、搬送装置16で搬送中のウェハWを鉛直軸周りに回転させることができる。回転機構60は、チャック部61と、回転軸62と、チャック回転モータ63と、ブラケット64と、昇降機構65と、昇降モータ66とを有する。
チャック部61は、所定の位置に収容されたウェハWの中心部下方に配置され、上面に図示しない吸引口が設けられる。そして、チャック部61は、かかる上面でウェハWを吸着保持することができる。チャック部61は、下面側に設けられた回転軸62に接続されるチャック回転モータ63によって、鉛直軸周りに所望の回転数で回転させることができる。
また、チャック部61および回転軸62は、ブラケット64を介して昇降機構65に接続されており、かかる昇降機構65を動作させることで鉛直方向へ移動することができる。この昇降機構65における鉛直方向への駆動力は、昇降モータ66で発生させることができる。
膜厚検知部70は、所定の位置に収容されたウェハW上における液膜Lの膜厚分布を検知する。膜厚検知部70は、アーム71と、複数の膜厚センサ72とを有する。アーム71は、基台51に支持されるとともに、複数の膜厚センサ72を保持する。
複数の膜厚センサ72は、所定の位置に収容されたウェハWの上方にそれぞれ配置される。膜厚センサ72は、たとえば、レーザセンサであり、ウェハW上の液膜Lの膜厚を検知することができる。なお、膜厚センサ72はレーザセンサに限られず、ウェハW上の液膜Lの膜厚を検知することができるセンサであればどのようなセンサであってもよい。
複数の膜厚センサ72は、たとえば、ウェハWの中央部上方や周縁部上方に配置される。これにより、膜厚検知部70は、ウェハW上に形成される液膜Lの膜厚分布を検知することができる。
なお、実施形態では、図5に示すように、複数の膜厚センサ72をウェハWの中央部上方に1つ配置し、周縁部上方に等間隔に4つ配置した例について示している。しかしながら、複数の膜厚センサ72の配置はかかる例に限られず、ウェハW上に形成される液膜Lの膜厚分布を検知することができればどのような配置であってもよい。
<液膜調整処理の詳細>
つづいて、実施形態に係るウェハW上の液膜調整処理の詳細について、図7〜図10を参照しながら説明する。図7〜図10は、実施形態に係る液膜調整処理の一工程を示す模式図である。
つづいて、実施形態に係るウェハW上の液膜調整処理の詳細について、図7〜図10を参照しながら説明する。図7〜図10は、実施形態に係る液膜調整処理の一工程を示す模式図である。
かかる液膜調整処理の前段階として、基板処理システム1では、まず、搬送装置13がキャリアCからウェハWを取り出して受渡部14へ載置する。
次に、基板処理システム1では、搬送装置16がウェハWを受渡部14から取り出して液処理ユニット17に搬送する。なお、かかる液処理ユニット17への搬送の際、搬送装置16は、重量検知部55を用いて液処理前のウェハWの重量を検知する。
次に、基板処理システム1では、液処理ユニット17において洗浄処理が行われる。液処理ユニット17は、たとえば、ウェハWのパターン形成面である上面に各種の処理液を供給することにより、ウェハWの上面からパーティクルや自然酸化膜等を除去する。
次に、基板処理システム1では、液処理ユニット17において液膜形成処理が行われる。液処理ユニット17は、たとえば、洗浄処理後のウェハWの上面にIPA液体を供給することにより、ウェハWの上面にIPA液体による液膜Lを形成する。
次に、図7に示すように、搬送装置16は、フォーク53を用いて、液膜Lが形成されたウェハWを液処理ユニット17から取り出し、所定の位置に収容する(ステップS1)。
次に、搬送装置16は、重量検知部55を用いて、上面に液膜Lが形成されたウェハWの重量を検知する。そして、液膜Lが形成されたウェハWの重量と、液処理前のウェハWの重量との差分により、ウェハWに形成された液膜Lの重量を検知する(ステップS2)。
次に、搬送装置16は、膜厚検知部70を用いて、ウェハW上に形成される液膜Lの膜厚分布を検知する(ステップS3)。そして、制御部7は、検知された液膜Lの重量および膜厚分布に基づいて、乾燥ユニット18に搬入される際の液膜Lが所定の膜厚で均一になるように調整する。
実施形態では、液膜Lの重量および膜厚分布に基づいて、乾燥ユニット18に搬入される際の液膜Lが所定の膜厚で均一になるよう調整可能な複数のレシピが記憶部8にあらかじめ記憶されている。そして、制御部7は、検知された液膜Lの重量および膜厚分布に適合するレシピを記憶部8から読み出し、読み出したレシピに基づいて搬送装置16の各部を制御する。
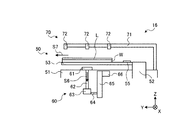
以降では、図7に示すように、ウェハW中央部の液膜LがウェハW周縁部の液膜Lより膜厚が大きいと検知された場合について説明する。この場合、搬送装置16は、ウェハWを乾燥ユニット18に向けて搬送しながら、図8に示すように、回転機構60を用いてウェハWをフォーク53からリフトさせる(ステップS4)。
たとえば、回転機構60は、昇降モータ66を動作させてチャック部61および回転軸62を上昇させるとともに、チャック部61の上面でウェハWを吸着保持することにより、ウェハWをフォーク53からリフトさせることができる。
次に、図9に示すように、搬送装置16は、回転機構60を用いてウェハWを回転させる(ステップS5)。たとえば、回転機構60は、チャック回転モータ63を用いてチャック部61を回転させることにより、ウェハWを回転させることができる。
これにより、液膜Lに遠心力F1を作用させることができることから、中央部が盛り上がった液膜Lの膜厚分布を均一にすることができる。このように、実施形態では、回転機構60により発生する遠心力F1を用いて、ウェハW上の液膜Lの膜厚分布を均一にすることができる。
また、実施形態では、乾燥ユニット18への搬送速度を制御することによりウェハWの搬送時間を制御する。これにより、揮発性であるIPA液体の乾燥量を制御することができることから、液膜L全体が所定の膜厚になるように調整することができる。
そして、図10に示すように、搬送装置16は、回転機構60を動作させてウェハWを下降させ、フォーク53に載置する(ステップS6)。最後に、搬送装置16は、液膜Lが所定の膜厚で均一になるように調整されたウェハWを乾燥ユニット18に搬出し(ステップS7)、処理を完了する。
ここまで説明したように、実施形態では、液膜Lが所定の膜厚で均一になるように調整されたウェハWを乾燥ユニット18で乾燥処理することができる。したがって、実施形態によれば、ウェハWの全面において、パターン倒れやパーティクル発生などの不具合が生じることを抑制することができる。
また、実施形態では、回転機構60を用いてウェハWに遠心力F1を作用させるとよい。これにより、形成された際に周縁部の膜厚より中央部の膜厚のほうが大きい液膜Lを、乾燥処理の際に均一にすることができる。
また、実施形態では、膜厚検知部70によりウェハW上の液膜Lの膜厚分布を検知するとよい。これにより、高い精度で液膜Lの膜厚が均一になるように調整することができる。
なお、実施形態では、複数の膜厚センサ72を用いて液膜Lの膜厚分布を検知する例について示したが、液膜Lの膜厚分布を検知する手法はかかる例に限られない。たとえば、カメラを用いて液膜Lの状態を撮像し、かかる撮像データにフィルタ処理などを施すことにより、液膜Lの膜厚分布を評価してもよい。
また、実施形態では、重量検知部55によりウェハW上の液膜Lの重量を検知するとよい。これにより、高い精度で液膜Lが所定の膜厚になるように調整することができる。
また、実施形態では、回転機構60を用いて液膜Lに遠心力F1を作用させた例について示したが、液膜Lに遠心力F1を作用させる機構は回転機構60に限られない。たとえば、搬送装置16に備えられている旋回機構の旋回軸とウェハWの中心とを一致させて、かかる旋回機構を動作させることにより、液膜Lに遠心力F1を作用させてもよい。
実施形態に係る基板処理装置(基板処理システム1)は、液処理部(液処理ユニット17)と、乾燥処理部(乾燥ユニット18)と、搬送部(搬送装置16)と、制御部7とを備える。液処理部(液処理ユニット17)は、基板(ウェハW)の上面に液膜Lを形成する。乾燥処理部(乾燥ユニット18)は、液膜Lが形成された基板(ウェハW)を乾燥させる。搬送部(搬送装置16)は、液処理部(液処理ユニット17)で処理された基板(ウェハW)を乾燥処理部(乾燥ユニット18)に搬送する。制御部7は、搬送部(搬送装置16)を制御して、乾燥処理部(乾燥ユニット18)に搬入される際の液膜Lが均一になるように調整する。これにより、ウェハW表面に形成される液膜Lを、乾燥処理の際に所定の膜厚で均一にすることができる。
また、実施形態に係る基板処理装置(基板処理システム1)において、搬送部(搬送装置16)は、基板(ウェハW)を回転させる回転機構60を有する。そして、制御部7は、回転機構60により発生する遠心力F1を用いて液膜Lの膜厚が均一になるように調整する。これにより、形成された際に周縁部の膜厚より中央部の膜厚のほうが大きい液膜Lを、乾燥処理の際に均一にすることができる。
また、実施形態に係る基板処理装置において、搬送部(搬送装置16)は、液膜Lの膜厚分布を検知する膜厚検知部70を有する。そして、制御部7は、膜厚検知部70で検知した液膜Lの膜厚分布に基づいて液膜Lの膜厚が均一になるように調整する。これにより、液膜Lの膜厚を高い精度で均一になるように調整することができる。
また、実施形態に係る基板処理装置において、搬送部(搬送装置16)は、基板(ウェハW)の重量を検知する重量検知部55を有する。そして、制御部7は、重量検知部55で検知した液膜Lの重量に基づいて液膜Lが所定の膜厚になるように調整する。
<変形例>
つづいては、実施形態の各種変形例について、図11〜図15を参照しながら説明する。なお、以下の各種変形例において実施形態と同一の部位には同一の符号を付し、重複する説明は省略する。図11および図12は、実施形態の変形例1に係る液膜調整処理の一工程を示す模式図である。
つづいては、実施形態の各種変形例について、図11〜図15を参照しながら説明する。なお、以下の各種変形例において実施形態と同一の部位には同一の符号を付し、重複する説明は省略する。図11および図12は、実施形態の変形例1に係る液膜調整処理の一工程を示す模式図である。
実施形態では、ウェハW上の液膜Lを均一にする手法として遠心力F1を用いた例について示したが、液膜Lを均一にする手法は遠心力F1を用いた例に限られない。たとえば、図11に示すように、ウェハWを乾燥ユニット18に搬送する際、搬送装置16は、ウェハWに搬送方向(図ではX軸正方向)とは逆向き(図ではX軸負方向)の慣性力F2を作用させることができる。
そして、搬送装置16は、かかる慣性力F2を作用させることにより、ウェハW上で慣性力F2と同じ向きに液膜Lを揺らすことができる。
さらに、図12に示すように、搬送装置16は、上記搬送方向(図ではX軸正方向)への動きを止めた際、ウェハWに搬送方向と同じ向きの慣性力F3を作用させることができる。そして、搬送装置16は、かかる慣性力F3を作用させることにより、ウェハW上で慣性力F3と同じ向きに液膜Lを揺らすことができる。
このように、変形例1では、搬送装置16で搬送する際に生じる慣性力F2、F3を液膜Lに作用させることにより、液膜LをウェハW上でさまざまな向きに揺らすことができることから、ウェハW上における液膜Lの膜厚を均一にすることができる。
なお、上述の変形例1では、搬送エリア15に沿った方向にウェハWを搬送する際に慣性力F2、F3を作用させた例について示した。しかしながら、フォーク53を用いて液処理ユニット17から搬送装置16に収容する際や、フォーク53を用いて搬送装置16から乾燥ユニット18に搬出する際などに生じる慣性力を利用して液膜Lの膜厚を均一にしてもよい。
また、変形例1では、実施形態と同様に、乾燥ユニット18への搬送速度を制御することによりウェハWの搬送時間を制御する。これにより、揮発性であるIPA液体の乾燥量を制御することができることから、液膜L全体が所定の膜厚になるように調整することができる。
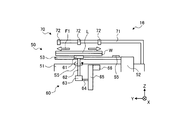
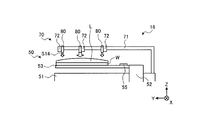
図13は、実施形態の変形例2に係る搬送装置16の構成例を示す断面図である。かかる変形例2の搬送装置16は、回転機構60ではなくガス吐出部80が設けられる点で実施形態とは異なる。
ガス吐出部80は、所定の位置に収容されたウェハWの液膜Lに乾燥用のガスを吐出する。ガス吐出部80は、たとえば複数設けられ、アーム71に取り付けられる。複数のガス吐出部80は、所定の位置に収容されたウェハWの上方にそれぞれ配置される。
複数のガス吐出部80は、たとえば、ウェハWの中央部上方や周縁部上方に配置される。これにより、複数のガス吐出部80は、ウェハW上に形成される液膜Lの異なる位置にそれぞれガスを吐出することができる。
図14〜図16は、実施形態の変形例2に係る液膜調整処理の一工程を示す模式図である。図14に示すように、搬送装置16は、フォーク53を用いて液膜Lが形成されたウェハWを液処理ユニット17から取り出し、所定の位置に収容する(ステップS11)。次に、搬送装置16は、重量検知部55を用いて、ウェハWに形成された液膜Lの重量を検知する(ステップS12)。
次に、搬送装置16は、膜厚検知部70を用いて、ウェハW上に形成される液膜Lの膜厚分布を検知する(ステップS13)。そして、制御部7は、検知された液膜Lの重量および膜厚分布に基づいて、乾燥ユニット18に搬入される際の液膜Lが所定の膜厚で均一になるように調整する。なお、ここまでの処理は実施形態と同様である。
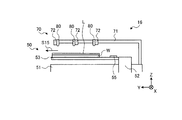
次に、図15に示すように、搬送装置16は、検知された液膜Lの重量および膜厚分布に基づいて、ガス吐出部80から乾燥用のガスを液膜Lに吐出する(ステップS14)。
かかるステップS14では、図15に示すように、液膜Lの膜厚が大きい部位(図ではウェハWの中央部)に対して、より多くのガスをガス吐出部80から吐出するとよい。これにより、膜厚が大きい部位における液膜Lの乾燥を促進することができることから、ウェハW上における液膜Lの膜厚を均一にすることができる。
最後に、図16に示すように、搬送装置16は、液膜Lが所定の膜厚で均一になるように調整されたウェハWを乾燥ユニット18に搬出し(ステップS15)、処理を完了する。
なお、かかる変形例2では、実施形態と同様に、ウェハWの搬送時間を制御することにより、液膜L全体を所定の膜厚に調整してもよいし、複数のガス吐出部80から吐出されるガスの量をそれぞれ調整することにより、液膜L全体を所定の膜厚に調整してもよい。
また、かかる変形例2では、複数のガス吐出部80とウェハWとを相対的に動かして、ガスを当てる位置を変えてもよい。さらに、ガスを当てる位置を変える手段として、例えば、ウェハWを回転させる機構(回転機構60)を用いてもよい。
変形例1に係る基板処理装置(基板処理システム1)において、制御部7は、基板(ウェハW)の搬送の際に生じる慣性力F2、F3を用いて液膜Lの膜厚が均一になるように調整する。これにより、液膜LをウェハW上でさまざまな向きに揺らすことができることから、ウェハW上の液膜Lの膜厚を均一にすることができる。
変形例2に係る基板処理装置(基板処理システム1)において、搬送部(搬送装置16)は、液膜Lにガスを吐出するガス吐出部80を有する。そして、制御部7は、ガス吐出部80で液膜Lを乾燥させて液膜Lの膜厚が均一になるように調整する。これにより、膜厚が大きい部位での液膜Lの乾燥を促進することができることから、ウェハW上の液膜Lの膜厚を均一にすることができる。
<基板処理の詳細>
つづいて、図17を参照しながら、実施形態に係る基板処理システム1が実行する液膜調整処理の詳細について説明する。図17は、実施形態に係る液膜調整処理の処理手順を示すフローチャートである。
つづいて、図17を参照しながら、実施形態に係る基板処理システム1が実行する液膜調整処理の詳細について説明する。図17は、実施形態に係る液膜調整処理の処理手順を示すフローチャートである。
最初に、制御部7は、液処理ユニット17を動作させて、ウェハWの上面にIPA液体の液膜Lを形成する(ステップS101)。次に、制御部7は、搬送装置16のフォーク53を制御して、液膜Lが形成されたウェハWを液処理ユニット17から搬出する(ステップS102)。
次に、制御部7は、搬送装置16の重量検知部55を制御して、ウェハW上に形成された液膜Lの重量を検知する(ステップS103)。また、ステップS103の処理と平行して、制御部7は、膜厚検知部70を制御して、ウェハW上に形成された液膜Lの膜厚分布を検知する(ステップS104)。
次に、制御部7は、検知された液膜Lの重量および膜厚分布に基づいて、乾燥ユニット18に搬入される際の液膜Lが所定の膜厚で均一になるように調整する(ステップS105)。そして、制御部7は、搬送装置16のフォーク53を制御して、液膜Lが所定の膜厚で均一になるように調整されたウェハWを乾燥ユニット18に搬入する(ステップS106)。
最後に、制御部7は、乾燥ユニット18を制御して、液膜Lが形成されたウェハWに対して超臨界乾燥処理を行うことにより、ウェハWを乾燥して(ステップS107)、処理を完了する。
実施形態に係る基板処理方法は、基板(ウェハW)の上面に液膜Lを形成する処理(ステップS101)と、液膜Lが形成された基板(ウェハW)を搬送する処理と、搬送された基板(ウェハW)を乾燥する処理(ステップS107)と、を含む。そして、搬送する処理は、乾燥する処理(ステップS107)の際の液膜Lが所定の膜厚で均一になるように調整する(ステップS105)。これにより、ウェハW表面に形成される液膜Lを、乾燥処理の際に所定の膜厚で均一にすることができる。
以上、本開示の実施形態について説明したが、本開示は上記の実施形態に限定されるものではなく、その趣旨を逸脱しない限りにおいて種々の変更が可能である。たとえば、上記の実施形態では、あらかじめ記憶部8に記憶されたレシピに基づいて、制御部7が搬送装置16を制御する例について示したが、液膜Lの重量や膜厚分布を常時検知して、かかる検知されたデータに基づいて搬送装置16を制御してもよい。
今回開示された実施形態は全ての点で例示であって制限的なものではないと考えられるべきである。実に、上記した実施形態は多様な形態で具現され得る。また、上記の実施形態は、添付の特許請求の範囲及びその趣旨を逸脱することなく、様々な形態で省略、置換、変更されてもよい。
W ウェハ
1 基板処理システム(基板処理装置の一例)
7 制御部
16 搬送装置(搬送部の一例)
17 液処理ユニット(液処理部の一例)
18 乾燥ユニット(乾燥処理部の一例)
50 基板保持部
55 重量検知部
60 回転機構
70 膜厚検知部
80 ガス吐出部
L 液膜
F1 遠心力
F2、F3 慣性力
1 基板処理システム(基板処理装置の一例)
7 制御部
16 搬送装置(搬送部の一例)
17 液処理ユニット(液処理部の一例)
18 乾燥ユニット(乾燥処理部の一例)
50 基板保持部
55 重量検知部
60 回転機構
70 膜厚検知部
80 ガス吐出部
L 液膜
F1 遠心力
F2、F3 慣性力
Claims (7)
- 基板の上面に液膜を形成する液処理部と、
前記液膜が形成された前記基板を乾燥させる乾燥処理部と、
前記液処理部で処理された前記基板を前記乾燥処理部に搬送する搬送部と、
前記搬送部を制御して、前記乾燥処理部に搬入される際の前記液膜が所定の膜厚で均一になるように調整する制御部と、
を備える基板処理装置。 - 前記搬送部は、前記基板を回転させる回転機構を有し、
前記制御部は、前記回転機構により生じる遠心力を用いて前記液膜の膜厚が均一になるように調整する、請求項1に記載の基板処理装置。 - 前記制御部は、前記基板の搬送の際に生じる慣性力を用いて前記液膜の膜厚が均一になるように調整する、請求項1または2に記載の基板処理装置。
- 前記搬送部は、前記液膜にガスを吐出するガス吐出部を有し、
前記制御部は、前記ガス吐出部で前記液膜を乾燥させて前記液膜の膜厚が均一になるように調整する、請求項1〜3のいずれか一つに記載の基板処理装置。 - 前記搬送部は、前記液膜の膜厚分布を検知する膜厚検知部を有し、
前記制御部は、前記膜厚検知部で検知した前記液膜の膜厚分布に基づいて前記液膜の膜厚が均一になるように調整する、請求項1〜4のいずれか一つに記載の基板処理装置。 - 前記搬送部は、前記基板の重量を検知する重量検知部を有し、
前記制御部は、前記重量検知部で検知した前記液膜の重量に基づいて前記液膜が所定の膜厚になるように調整する、請求項1〜5のいずれか一つに記載の基板処理装置。 - 基板の上面に液膜を形成する処理と、
前記液膜が形成された前記基板を搬送する処理と、
搬送された前記基板を乾燥する処理と、
を含み、
前記搬送する処理は、前記乾燥する処理の際の前記液膜が所定の膜厚で均一になるように調整する
基板処理方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018139315A JP2020017618A (ja) | 2018-07-25 | 2018-07-25 | 基板処理装置および基板処理方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018139315A JP2020017618A (ja) | 2018-07-25 | 2018-07-25 | 基板処理装置および基板処理方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2020017618A true JP2020017618A (ja) | 2020-01-30 |
Family
ID=69580826
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018139315A Pending JP2020017618A (ja) | 2018-07-25 | 2018-07-25 | 基板処理装置および基板処理方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2020017618A (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020161609A (ja) * | 2019-03-26 | 2020-10-01 | 株式会社Screenホールディングス | 基板処理装置およびその搬送制御方法 |
| JP2021125471A (ja) * | 2020-01-31 | 2021-08-30 | 株式会社Screenホールディングス | 基板処理装置 |
| KR20230155691A (ko) * | 2022-05-04 | 2023-11-13 | 엘에스이 주식회사 | 기판 이송 장치 |
| KR20250032985A (ko) * | 2023-08-28 | 2025-03-07 | 가부시키가이샤 스크린 홀딩스 | 기판 처리 방법 및 기판 처리 장치 |
| KR20250032984A (ko) * | 2023-08-28 | 2025-03-07 | 가부시키가이샤 스크린 홀딩스 | 기판 처리 방법 및 기판 처리 시스템 |
| KR20250032983A (ko) * | 2023-08-28 | 2025-03-07 | 가부시키가이샤 스크린 홀딩스 | 기판 처리 방법 및 기판 처리 시스템 |
| WO2025109997A1 (ja) * | 2023-11-20 | 2025-05-30 | 東京エレクトロン株式会社 | 基板処理装置、処理容器交換方法、基板処理方法および記憶媒体 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1092781A (ja) * | 1996-06-04 | 1998-04-10 | Ebara Corp | 基板の搬送方法及び装置 |
| JP2003257833A (ja) * | 2002-03-04 | 2003-09-12 | Tokyo Electron Ltd | 液処理方法および液処理装置 |
-
2018
- 2018-07-25 JP JP2018139315A patent/JP2020017618A/ja active Pending
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1092781A (ja) * | 1996-06-04 | 1998-04-10 | Ebara Corp | 基板の搬送方法及び装置 |
| JP2003257833A (ja) * | 2002-03-04 | 2003-09-12 | Tokyo Electron Ltd | 液処理方法および液処理装置 |
Cited By (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020161609A (ja) * | 2019-03-26 | 2020-10-01 | 株式会社Screenホールディングス | 基板処理装置およびその搬送制御方法 |
| WO2020195175A1 (ja) * | 2019-03-26 | 2020-10-01 | 株式会社Screenホールディングス | 基板処理装置およびその搬送制御方法 |
| JP7261052B2 (ja) | 2019-03-26 | 2023-04-19 | 株式会社Screenホールディングス | 基板処理装置およびその搬送制御方法 |
| JP2021125471A (ja) * | 2020-01-31 | 2021-08-30 | 株式会社Screenホールディングス | 基板処理装置 |
| KR20230155691A (ko) * | 2022-05-04 | 2023-11-13 | 엘에스이 주식회사 | 기판 이송 장치 |
| KR102733874B1 (ko) | 2022-05-04 | 2024-11-26 | 엘에스이 주식회사 | 기판 이송 장치 |
| KR20250032983A (ko) * | 2023-08-28 | 2025-03-07 | 가부시키가이샤 스크린 홀딩스 | 기판 처리 방법 및 기판 처리 시스템 |
| KR20250032984A (ko) * | 2023-08-28 | 2025-03-07 | 가부시키가이샤 스크린 홀딩스 | 기판 처리 방법 및 기판 처리 시스템 |
| KR20250032985A (ko) * | 2023-08-28 | 2025-03-07 | 가부시키가이샤 스크린 홀딩스 | 기판 처리 방법 및 기판 처리 장치 |
| JP7653480B2 (ja) | 2023-08-28 | 2025-03-28 | 株式会社Screenホールディングス | 基板処理方法および基板処理システム |
| JP7653481B2 (ja) | 2023-08-28 | 2025-03-28 | 株式会社Screenホールディングス | 基板処理方法および基板処理システム |
| KR102825488B1 (ko) | 2023-08-28 | 2025-06-30 | 가부시키가이샤 스크린 홀딩스 | 기판 처리 방법 및 기판 처리 시스템 |
| KR102828283B1 (ko) | 2023-08-28 | 2025-07-03 | 가부시키가이샤 스크린 홀딩스 | 기판 처리 방법 및 기판 처리 시스템 |
| TWI897536B (zh) * | 2023-08-28 | 2025-09-11 | 日商斯庫林集團股份有限公司 | 基板處理方法及基板處理系統 |
| KR102905862B1 (ko) | 2023-08-28 | 2025-12-31 | 가부시키가이샤 스크린 홀딩스 | 기판 처리 방법 및 기판 처리 장치 |
| WO2025109997A1 (ja) * | 2023-11-20 | 2025-05-30 | 東京エレクトロン株式会社 | 基板処理装置、処理容器交換方法、基板処理方法および記憶媒体 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2020017618A (ja) | 基板処理装置および基板処理方法 | |
| US11715648B2 (en) | Substrate processing apparatus and substrate drying method | |
| JP7113949B2 (ja) | 基板処理装置 | |
| JP2024111009A (ja) | 基板処理システム、及び基板処理方法 | |
| KR102829641B1 (ko) | 기판 처리 시스템 및 기판 반송 방법 | |
| KR102468102B1 (ko) | 기판 처리 장치 | |
| JP2023155280A (ja) | 基板処理システム、及び基板処理方法 | |
| JP6425639B2 (ja) | 基板処理システム | |
| JP7337175B2 (ja) | 基板処理装置および基板処理方法 | |
| CN103377971A (zh) | 用于清洗基板的装置和方法 | |
| JP2020004757A (ja) | 基板処理装置および基板処理方法 | |
| US11069546B2 (en) | Substrate processing system | |
| US10892176B2 (en) | Substrate processing apparatus having top plate with through hole and substrate processing method | |
| JP7770107B2 (ja) | 基板処理装置および基板処理方法 | |
| US12255081B2 (en) | Substrate processing apparatus and substrate processing method | |
| US12412766B2 (en) | Substrate processing apparatus and substrate processing method | |
| US20250336690A1 (en) | Substrate processing method and substrate processing apparatus | |
| JP2023142170A (ja) | 基板処理装置及び基板処理方法 | |
| TW202612008A (zh) | 基板處理方法及基板處理系統 | |
| US20190164785A1 (en) | Substrate Processing Method and Substrate Processing Apparatus |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210430 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20220208 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220308 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20220906 |