JP2020009918A - 搬送用ハンド - Google Patents
搬送用ハンド Download PDFInfo
- Publication number
- JP2020009918A JP2020009918A JP2018130055A JP2018130055A JP2020009918A JP 2020009918 A JP2020009918 A JP 2020009918A JP 2018130055 A JP2018130055 A JP 2018130055A JP 2018130055 A JP2018130055 A JP 2018130055A JP 2020009918 A JP2020009918 A JP 2020009918A
- Authority
- JP
- Japan
- Prior art keywords
- pedestal
- communication port
- work
- transfer hand
- film
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/06—Gripping heads and other end effectors with vacuum or magnetic holding means
- B25J15/0616—Gripping heads and other end effectors with vacuum or magnetic holding means with vacuum
- B25J15/0683—Details of suction cup structure, e.g. grooves or ridges
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/683—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping
- H01L21/6838—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping with gripping and holding devices using a vacuum; Bernoulli devices
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67739—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations into and out of processing chamber
- H01L21/67742—Mechanical parts of transfer devices
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/683—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping
- H01L21/687—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches
- H01L21/68707—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches the wafers being placed on a robot blade, or gripped by a gripper for conveyance
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- General Physics & Mathematics (AREA)
- Manufacturing & Machinery (AREA)
- Computer Hardware Design (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Power Engineering (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Manipulator (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
Abstract
【課題】吸着効率の向上を図ることができる搬送用ハンドを提供する。【解決手段】搬送用ハンド10は、流体経路28に接続される連通口27が開口し且つワーク11と対向する対向面21を有する平板形状の本体20と、前記対向面上において前記連通口の周囲を取り囲み、且つ、前記連通口と連通する吸着口31を有する環状の台座30と、前記連通口を覆い、且つ、前記流体経路の流体の圧力に応じて変形可能な膜部40と、を備え、前記膜部は、前記流体経路が減圧されていない状態において平坦であって、前記対向面の延長線上、又は、前記対向面よりも前記吸着口側に配置されている。【選択図】図1
Description
本発明は、ワークを搬送するための搬送用ハンドに関する。
従来の搬送用ハンドとして、特許文献1の汎用真空チャックが知られている。この汎用真空チャックでは、上板、気室板、可撓薄膜及びチャック板がこの順で積層されている。上板には排気・加圧口が設けられ、気室板には気室が設けられ、チャック板には吸着口が設けられており、これらは互いに連通している。また、可撓薄膜は半球状凸部を有しており、排気時には半球状凸部は気室側に突出し、加圧時には半球状凸部は吸着口側に突出している。
上記特許文献1の汎用真空チャックでは、可撓薄膜は半球状凸部を有しているため、可撓薄膜と排気・加圧口との間隔を広く設けなければならない。このため、この間の空間を加圧及び排気するのに時間を要する。また、半球状凸部を排気・加圧口側と吸気口側との間で反転させるためには、大きな圧力を要する。これらによって、吸着口上の被チャック物を吸着する効率に劣っている。
本発明はこのような課題を解決するためになされたものであり、吸着効率の向上を図ることができる搬送用ハンドを提供することを目的としている。
本発明のある態様に係る搬送用ハンドは、流体経路に接続される連通口が開口し且つワークと対向する対向面を有する平板形状の本体と、前記対向面上において前記連通口の周囲を取り囲み、且つ、前記連通口と連通する吸着口を有する環状の台座と、前記連通口を覆い、且つ、前記流体経路の流体の圧力に応じて変形可能な膜部と、を備え、前記膜部は、前記流体経路が減圧されていない状態において平坦であって、前記対向面の延長線上、又は、前記対向面よりも前記吸着口側に配置されている。
この構成によれば、連通口を覆う膜部が平坦であるため、連通口の周囲を取り囲む台座の高さを低く抑えることができる。よって、台座上に配置されるワークを連通口に近づけ、膜部とワークとの間隔を小さくすることができる。また、平坦な膜部は半球状凸部よりも容易に変形するため、変形させる圧力を小さく抑えることができる。よって、ワークを吸着する効率を向上することができる。
前記膜部は、前記台座と一体的に形成されていてもよい。これによれば、膜部及び台座について同じ材料を用い、同じ工程で製造することができるため、製品及び製造のコストの低減化が図られる。
前記台座は、Oリングにより構成されていてもよい。これによれば、例えば、市販のOリングを用いることができるため、製品及び製造のコストの低減化を図ることができる。
前記台座は、前記連通口側から離れるに伴い径が拡大する切頭円錐形状を有していてもよい。これによれば、ワークに膜部を密着させ易く、また、これらの密着面積を広げることができる。よって、膜部とワークとの間の空間の密閉性を向上し、より確実にワークを吸着することができる。
前記台座は、前記対向面側の基端の面積が、前記基端と反対側の先端の面積以上であってもよい。これによれば、台座と本体との接合力を確保すると共に、台座が変形することを抑制し、また、ワークとの接触面積を小さく抑えることができる。
前記台座は、前記本体と一体的に形成されていてもよい。これによれば、台座及び本体について同じ材料を用い、同じ工程で製造することができるため、製品及び製造のコストの低減化が図られる。
前記ワークは、半導体基板であってもよい。これによれば、流体経路に接続される連通口は膜部により覆われているため、ダスト等の不純物が流体経路から連通口を介して半導体基板に付着することを防止することができる。
前記搬送用ハンドはクリーンルームにおいて前記ワークを搬送してもよい。これによれば、流体経路に接続される連通口は膜部により覆われているため、ダスト等の不純物がクリーンルームに排出されることを防止することができる。
本発明は、搬送用ハンドにおいて吸着効率の向上を図ることができるという効果を奏する。
本発明の上記目的、他の目的、特徴、及び利点は、添付図面参照の下、以下の好適な実施態様の詳細な説明から明らかにされる。
以下、本発明の実施の形態を、図面を参照しながら具体的に説明する。なお、以下では全ての図面を通じて同一又は相当する要素には同一の参照符号を付して、その重複する説明を省略する。
(実施の形態1)
<搬送用ハンドの構成>
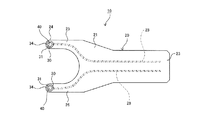
図1及び図2に示すように、本発明の一実施形態に係る搬送用ハンド10は、半導体基板等のワーク11を搬送するためのハンドであって、ロボット等の搬送装置に装着されて用いられる。例えば、これは、高い清純度が要求されるクリーンルームで使用される。なお、清浄度は、例えば、1m3の空気中の微粒子数を10のべき乗数で表したべき指数により表せる。
<搬送用ハンドの構成>
図1及び図2に示すように、本発明の一実施形態に係る搬送用ハンド10は、半導体基板等のワーク11を搬送するためのハンドであって、ロボット等の搬送装置に装着されて用いられる。例えば、これは、高い清純度が要求されるクリーンルームで使用される。なお、清浄度は、例えば、1m3の空気中の微粒子数を10のべき乗数で表したべき指数により表せる。
搬送用ハンド10は、本体20、台座30及び膜部40を有している。本体20は、例えば、セラミックス、樹脂及び弾性材等により形成されており、厚みが薄い平板形状であって、厚み方向に直交する2つの平面を有している。この一方の平面(対向面21)は、搬送用ハンド10に載置されたワーク11と対向する。なお、以下、対向面21に直交する方向(厚み方向)の一方側を上側と称し、他方側を下側と称するが、搬送用ハンド10の配置はこの方向に限定されない。この上下方向の場合、対向面21は本体20の上面となり、対向面21の反対側の面は下面22となる。
本体20は、例えば、搬送装置に装着される一方端部23から他方端部24に向かって2つに分岐するY字形状を有している。但し、本体20はY字形状に限定されず、矩形状及び円形状等の他の形状であってもよい。
2つの分岐部(第1分岐部25、第2分岐部26)は、互いに間隔を空けて平行に、一方端部23側から他方端部24側へ延びている。第1分岐部25及び第2分岐部26の各他方端部24には連通口27が設けられている。なお、搬送用ハンド10における連通口27の数は、2つに限定されず、1つであってもよいし、3つ以上であってもよい。複数の連通口27は互いに間隔を空けて配置されている。
連通口27は、例えば、円形状であって、対向面21に開口し、流体経路28を介して流体アクチュエータ(図示せず)に接続されている。流体経路28は、流体が流通する経路であって、本体20においてその一方端部23から他方端部24に延びて、連通口27に接続されている。流体アクチュエータ(図示せず)は、例えば、ポンプ及びシリンダ等が挙げられる。流体には、例えば、空気等の気体、及び、水等の液体が用いられる。
台座30は、例えば、密封可能なシール材から成り、Oリングが用いられる。台座30は、可撓性であって、PTFE等の樹脂、及びゴム等、弾性材により形成されている。
台座30は、環形状であって、例えば、対向面21から突出する円環形状又は円筒形状である。台座30は、一端開口(上側開口31)、他端開口(下側開口)、及び、上側開口31と下側開口との間の内部空間33を有している。例えば、上側開口31及び下側開口はそれぞれ1つの台座30に1つずつ設けられている。
台座30は、連通口27の周囲を連続的に取り囲むように、本体20の対向面21に配置されている。台座30は、例えば、連通口27の周囲に設けられた本体20の窪みに嵌められている。
台座30の内部空間33は、略円筒形状であって、対向面21に直交する方向(上下方向)に延びている。台座30の上側開口31及び下側開口は上下方向に連通口27に重なり、連通口27は上側開口31と下側開口との間に配置される。これにより、内部空間33は、上側開口31と連通口27との間に設けられ、連通口27を介して流体経路28に連通している。この互いに連通する内部空間33と流体経路28とを合わせた総空間12が形成される。
台座30は、上下方向(台座30の中心軸)に直交する断面積が対向面21側から上側開口31側に向かって小さくなっている。連通口27よりも上方に配置されている上側開口31は、連通口27と連通する吸着口であって、例えば、連通口27よりも径が大きくなっている。この上側開口31の周囲を取り囲む外周縁に、台座30の環状の上側端34が設けられている。
膜部40は、厚みが薄く、可撓性を有し、例えば、PTFE等の樹脂、及びゴム等、弾性材により形成されている。例えば、膜部40は、円盤状であって、上下方向に直交する方向に拡がり、膜部40の外周縁が台座30の上側端34に接続されている。これにより、膜部40は、対向面21よりも上方において台座30の上側開口31を塞ぎ、上側開口31よりも下方の連通口27を覆っている。
膜部40は、内部空間33と外部空間とを連通する孔を有さない。このため、膜部40は、内部空間33を含む総空間12を密封し、総空間12を外部空間と遮断している。この総空間12には流体が充填されており、膜部40は、総空間12の流体の圧力に応じて変形可能である。
<搬送用ハンドの使用方法>
ワーク11を搬送用ハンド10により搬送する際には、まず、図3(a)に示すように、搬送用ハンド10の対向面21上にワーク11を配置する。この際、対向面21よりも上方に突出する台座30の上側端34にワーク11が配置されている。このため、可撓性を有する台座30はワーク11の形状に沿って変形し、上側端34及び/又はこれに接続される膜部40の外周縁がワーク11と密着し、ここにワーク11との当接部が設けられる。
ワーク11を搬送用ハンド10により搬送する際には、まず、図3(a)に示すように、搬送用ハンド10の対向面21上にワーク11を配置する。この際、対向面21よりも上方に突出する台座30の上側端34にワーク11が配置されている。このため、可撓性を有する台座30はワーク11の形状に沿って変形し、上側端34及び/又はこれに接続される膜部40の外周縁がワーク11と密着し、ここにワーク11との当接部が設けられる。
ここで、流体経路28が減圧されていない状態において、台座30の上側開口31を塞ぐ膜部40は平坦になるように、流体アクチュエータが制御されている。このため、膜部40がワーク11に沿う。
そして、台座30の内部空間33から流体を排出するように流体アクチュエータを稼働する。これにより、流体経路28を介して内部空間33の流体が流体アクチュエータ側に吸引されて、流体経路28及び内部空間33を含む総空間12が減圧される。
よって、図3(b)に示すように、可撓性の膜部40は、連通口27及び流体経路28側へ撓むように変形して、ワーク11から離れ、ワーク11、膜部40及び台座30に囲まれた空間(膜空間41)が形成される。膜空間41の圧力が大気圧よりも低いため、この圧力差によってワーク11が台座30の上側開口31に吸着される。
ここで、台座30は、膜部40の変形に伴い、ワーク11の形状に沿って変形する。よって、台座30とワーク11との密着性が維持され、膜空間41の気密性が確保されるため、ワーク11を十分に吸着保持することができる。また、搬送用ハンド10には、複数の台座30が設けられているため、ワーク11をより確実に保持しながら搬送することができる。さらに、対向面21から突出する台座30上にワーク11が配置されるため、対向面21とワーク11との接触面積を低減することができる。
一方、吸着されたワーク11を取り外す際には、台座30の内部空間33に流体を供給するように流体アクチュエータを稼働する。これにより、流体が流体経路28から内部空間33に流入し、総空間12が増圧される。よって、図3(a)に示すように、下方に湾曲していた膜部40は、平坦に戻るように変形する。このため、膜空間41の圧力が大気圧に等しくなり、吸着されていたワーク11が台座30の上側開口31から離れる。
ここで、膜部40により総空間12と外部空間とが遮断されているため、総空間12に供給された流体が外部空間に排出されることがない。このため、外部空間がクリーンルームであっても、流体及びこれに含まれる不純物等により外部空間が汚染されることを防止することができる。
また、膜部40は対向面21よりも台座30の上側開口31側に配置されている。これにより、上側開口31の周囲を取り囲む台座30の上側端34上に載置されるワーク11と、膜部40とを近づけることができる。よって、ワーク11と膜部40との間の膜空間41が小さく、ワーク11を吸着する吸着効率を向上することができる。
さらに、流体経路28が減圧されていない状態において、膜部40は平坦である。例えば、上記特許文献1のように、可撓薄膜が半球状凸部を有していると、半球状凸部を変形するためには大きな圧力を要する。これに対して、平坦な膜部40を変形させるための圧力を小さくすることができるため、吸着効率をさらに向上することができる。
また、上記特許文献1の可撓薄膜の半球状凸部では、気室側に突出した形状と開口側に突出した形状のいずれかにしか変形しない。このため、ワーク11と可撓薄膜との間の空間の圧力(吸着力)を任意に調整することができなかった。これに対し、平坦な膜部40を変形させる場合、ワーク11と膜部40との間の膜空間41の圧力は膜部40の変形量に依存するため、膜空間41の圧力を容易に調整することができる。よって、変形し易いワーク11に対して大きな圧力が不要に作用することがなく、ワーク11の変形等を防止することができる。
また、台座30にOリングを用いることにより、製品及び製造のコストの低減化を図ることができる。さらに、上下方向に直交する方向において、対向面21における台座30の面積が上側端34の面積よりも大きい。このため、台座30と本体20との接合力を確保すると共に、台座30が変形することを抑制し、また、ワーク11との接触面積を小さく抑えることができる。
さらに、台座30の内面は、連通口27側から上側開口31側に向かって拡径するテーパ形状である。これにより、台座30の外径を大きくすることなく、上側開口31及びこれを覆う膜部40の面積を大きくし、膜部40が変形しやすくすることができる。
なお、Oリングは対向面21上に配置されていてもよい。また、台座30は、周方向に直交する断面が矩形状又は台形状であってもよい。
(実施の形態2)
図4に示すように、本発明の実施の形態2に係る搬送用ハンド10は、台座130の形状が実施の形態1と異なる。これ以外の構成については、実施の形態1と同様であるため、その説明を省略する。
図4に示すように、本発明の実施の形態2に係る搬送用ハンド10は、台座130の形状が実施の形態1と異なる。これ以外の構成については、実施の形態1と同様であるため、その説明を省略する。
台座130は、円筒部130a、係止部130b及び拡径部130cを有し、これらは一体的に形成されている。係止部130bは、円筒部130aの下端部から径方向の外側へ拡がる鍔形状を有している。
円筒部130aは、一端開口(第1上側開口)、他端開口(第1下側開口)、及び、第1上側開口と第1下側開口との間の第1内部空間を有している。第1内部空間を取り囲む第1内周面は第1下側開口から第1上側開口に向かって径が拡大し、円筒部130aの第1外周面は上下方向において径が一定である。このため、第1内周面と第1外周面との間の円筒部130aの寸法(厚み)は、第1下側開口から第1上側開口に向かって小さくなっている。
拡径部130cは、切頭円錐形状であって、一端開口(第2上側開口131、吸着口)、他端開口(第2下側開口)、及び、第2上側開口131と第2下側開口との間の第2内部空間を有している。第2下側開口は円筒部130aの第1上側開口と接続し、これらを介して第1内部空間と第2内部空間とは連通し、台座130の内部空間133が形成されている。
拡径部130cにおいて第2内部空間を取り囲む第2内周面、及び、第2内周面を取り囲む第2外周面は、第2下側開口から第2上側開口131に向かって径が拡大している。よって、第2内周面と第2外周面との間の寸法(厚み)は、第2下側開口から第2上側開口131に向かって一定であって、円筒部130aの厚みよりも薄い。このため、拡径部130cは円筒部130aよりも変形し易い。
台座130は、連通口27の周囲を連続的に取り囲むように、本体20の対向面21上に配置されている。これにより、台座130の円筒部130aの第1下側開口は、上下方向において連通口27に重なって、連通口27に接続する。このため、内部空間133は連通口27を介して流体経路28に連通し、互いに連通する内部空間133と流体経路28とを合わせた総空間12が形成される。
台座130は、係止部130bが連通口27の周囲に設けられた本体20の窪みに嵌められ、本体20に固定されている。拡径部130cは、対向面21上に配置される。
膜部40の外周端は、第2上側開口131の周囲を取り囲む拡径部130cの上側端134に接続されている。膜部40は、対向面21よりも第2上側開口131側において、第2上側開口131を塞ぎ、これよりも下方の連通口27を覆っている。これにより、膜部40は、台座130の内部空間133及びこれを含む総空間12を外部空間から遮断している。
ワーク11を搬送用ハンド10により搬送する際には、ワーク11を台座130上に配置する。これにより、台座130の上側端134がワーク11に密着し、第2上側開口131がワーク11により覆われる。そこで、流体アクチュエータによって総空間12を減圧すると、ワーク11、膜部40及び台座130により囲まれた膜空間41が形成され、膜空間41が大気圧よりも減圧される。これにより、ワーク11が第2上側開口131に吸着される。
この際、拡径部130cがワーク11の形状に沿って変形し易いため、ワーク11に密着し、膜空間41の気密性を維持し、ワーク11を十分に吸着保持することができる。また、搬送用ハンド10には、複数の台座130が設けられているため、ワーク11をより確実に保持しながら搬送することができる。
(実施の形態3)
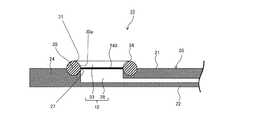
図5に示すように、本発明の実施の形態3に係る搬送用ハンド10は、台座30に対する膜部240の位置が実施の形態1と異なる。これ以外の構成については、実施の形態1と同様であるため、その説明を省略する。
図5に示すように、本発明の実施の形態3に係る搬送用ハンド10は、台座30に対する膜部240の位置が実施の形態1と異なる。これ以外の構成については、実施の形態1と同様であるため、その説明を省略する。
膜部240の外周端は、連通口27の周囲を取り囲む台座30の内周面30aに接続されおり、対向面21の延長線上に配置されている。これにより、膜部240は、連通口27を覆って、総空間12を外部空間から遮断している。
ワーク11を搬送用ハンド10により搬送する際には、ワーク11を台座30上に配置する。これにより、台座30の上側端34がワーク11に密着し、上側開口31がワーク11により覆われる。そこで、流体アクチュエータによって総空間12を減圧すると、ワーク11、膜部240及び台座30により囲まれた膜空間41が形成され、膜空間41が大気圧よりも減圧される。これにより、ワーク11が上側開口31に吸着される。
この膜部240は対向面21の延長線上に配置されている。これにより、台座30の上側端34上に載置されるワーク11と、膜部240とを近づけることができる。よって、ワーク11と膜部240との間の膜空間41が小さく、ワーク11を吸着する吸着効率を向上することができる。
また、膜部240は、ワーク11と接触する台座30の上側端34よりもワーク11と反対側に設けられている。このため、膜部240がワーク11と接触することがなく、搬送用ハンド10におけるワーク11との接触面積を小さくすることができる。
なお、実施の形態2に係る台座30においても、実施の形態3と同様に、膜部240を対向面21の延長線上に配置してもよい。この場合も、膜空間41を小さくすることができるため、ワーク11を吸着する吸着効率を向上することができる。
(実施の形態4)
図6(a)に示すように、本発明の実施の形態4に係る搬送用ハンド10は、台座130の形状が実施の形態1と異なる。これ以外の構成については、実施の形態1と同様であるため、その説明を省略する。
図6(a)に示すように、本発明の実施の形態4に係る搬送用ハンド10は、台座130の形状が実施の形態1と異なる。これ以外の構成については、実施の形態1と同様であるため、その説明を省略する。
台座330は、円筒形状であって、周方向に直交する断面が台形状である。このため、台座330は、本体20の対向面21側の基端335の面積が、基端335と反対側の先端334(上側端)の面積よりも大きく形成されている。台座330の変形を抑制することができると共に、先端334とこの上に配置されるワーク11と接触面積を小さくすることができる。また、台座330の高さを低く抑えることができる。
台座330の内面は、連通口27側から上側開口331側に向かって拡径するテーパ形状である。これにより、台座330の外径を大きくすることなく、上側開口331及びこれを覆う膜部40の面積を大きくし、膜部40が変形しやすくすることができる。
台座330は本体20と一体的に形成されている。これによれば、台座330及び本体20について同じ材料を用い、同じ工程で製造することができるため、製品及び製造のコストの低減化が図られる。また、台座330と本体20との接合強度を高めることができる。
膜部40は、台座330の先端334を覆うように台座330に接続されている。これにより、膜部40は、対向面21よりも上方において台座330の上側開口331を塞ぎ、上側開口331よりも下方の連通口27を覆っている。
また、台座330の先端334が膜部40により覆われているため、膜部40において先端334を覆う部分がワーク11と当接する。このため、台座330がワーク11に当接しないため、台座330の材料の自由度を高めることができる。なお、膜部40は、台座330の先端334がワーク11に当接するように台座330に取り付けられていてもよい。
また、台座330を本体20と別体で形成し、本体20に接合してもよい。この場合、本体20及び台座330についてそれぞれの特性に合わせた材料を選択することができ、これらの材料の自由度を高めることができる。
例えば、本体20に剛性が高いセラミックスを用い、台座330に弾性材を用いてもよい。この場合、図6(b)に示すように、台座330は、その先端334上に載置されるワーク11の形状に合わせて変形し、密着することができる。よって、この場合、膜部40は、台座330の先端334を覆わず、外周縁が台座330の内周面に接続していてもよい。
また、台座330は、周方向に直交する断面が矩形状であってもよい。このため、台座330は、その基端335の面積が、先端334の面積と等しく形成される。台座330の変形を抑制することができると共に、先端334とこの上に配置されるワーク11と接触面積を小さくすることができる。また、台座330の高さを低く抑えることができると共に、台座330を容易に形成することができる。
上記全ての実施の形態において、膜部40、240を台座30、130と一体的に形成してもよい。この場合、膜部40、240と台座30、130とは同じ材料により同一工程において形成される。このため、製品及び製造コストを低減することができる。
また、上記全ての実施の形態において、膜部40、240は、連通口27を覆っていれば、連通口27よりも上側開口31、131、331側に設けられていてもよい。
なお、上記全実施の形態は、互いに相手を排除しない限り、互いに組み合わせてもよい。また、上記説明は、例示としてのみ解釈されるべきであり、本発明は実行する最良の態様を当業者に教示する目的で提供されたものである。本発明の精神を逸脱することなくその構造及び/又は機能の詳細を実質的に変更できる。
本発明の搬送用ハンドは、吸着効率の向上を図ることができる搬送用ハンド等として有用である。
10 :搬送用ハンド
11 :ワーク
21 :対向面
27 :連通口
30 :台座
31 :上側開口(吸着口)
33 :内部空間
40 :膜部
130 :台座
131 :第2上側開口(吸着口)
133 :内部空間
240 :膜部
330 :台座
331 :上側開口(吸着口)
11 :ワーク
21 :対向面
27 :連通口
30 :台座
31 :上側開口(吸着口)
33 :内部空間
40 :膜部
130 :台座
131 :第2上側開口(吸着口)
133 :内部空間
240 :膜部
330 :台座
331 :上側開口(吸着口)
Claims (8)
- 流体経路に接続される連通口が開口し且つワークと対向する対向面を有する平板形状の本体と、
前記対向面上において前記連通口の周囲を取り囲み、且つ、前記連通口と連通する吸着口を有する環状の台座と、
前記連通口を覆い、且つ、前記流体経路の流体の圧力に応じて変形可能な膜部と、を備え、
前記膜部は、前記流体経路が減圧されていない状態において平坦であって、前記対向面の延長線上、又は、前記対向面よりも前記吸着口側に配置されている、搬送用ハンド。 - 前記膜部は、前記台座と一体的に形成されている、請求項1に記載の搬送用ハンド。
- 前記台座は、Oリングにより構成されている、請求項1又は2に記載の搬送用ハンド。
- 前記台座は、前記連通口側から離れるに伴い径が拡大する切頭円錐形状を有している、請求項1又は2に記載の搬送用ハンド。
- 前記台座は、前記対向面側の基端の面積が、前記基端と反対側の先端の面積以上である、請求項1に記載の搬送用ハンド。
- 前記台座は、前記本体と一体的に形成されている、請求項1に記載の搬送用ハンド。
- 前記ワークは、半導体基板である、請求項1〜6のいずれか一項に記載の搬送用ハンド。
- 前記搬送用ハンドはクリーンルームにおいて前記ワークを搬送する、請求項1〜7のいずれか一項に記載の搬送用ハンド。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018130055A JP2020009918A (ja) | 2018-07-09 | 2018-07-09 | 搬送用ハンド |
| US16/972,026 US20210229297A1 (en) | 2018-07-09 | 2019-07-01 | Conveying hand |
| PCT/JP2019/026148 WO2020013013A1 (ja) | 2018-07-09 | 2019-07-01 | 搬送用ハンド |
| TW108123504A TW202005764A (zh) | 2018-07-09 | 2019-07-04 | 搬送用手 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018130055A JP2020009918A (ja) | 2018-07-09 | 2018-07-09 | 搬送用ハンド |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2020009918A true JP2020009918A (ja) | 2020-01-16 |
Family
ID=69142608
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018130055A Withdrawn JP2020009918A (ja) | 2018-07-09 | 2018-07-09 | 搬送用ハンド |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20210229297A1 (ja) |
| JP (1) | JP2020009918A (ja) |
| TW (1) | TW202005764A (ja) |
| WO (1) | WO2020013013A1 (ja) |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04109887U (ja) * | 1991-03-12 | 1992-09-24 | 日本電気株式会社 | 吸着パツド |
| JPH08112794A (ja) * | 1994-10-18 | 1996-05-07 | Fujitsu Ltd | 吸着方法及び吸着装置及び搬送装置 |
| US5961169A (en) * | 1998-07-27 | 1999-10-05 | Strasbaugh | Apparatus for sensing the presence of a wafer |
| US7055875B2 (en) * | 2003-07-11 | 2006-06-06 | Asyst Technologies, Inc. | Ultra low contact area end effector |
| JP6186157B2 (ja) * | 2013-04-03 | 2017-08-23 | 学校法人 関西大学 | 吸着機構 |
| JP2015013358A (ja) * | 2013-07-08 | 2015-01-22 | 株式会社安川電機 | 吸着構造、ロボットハンドおよびロボット |
-
2018
- 2018-07-09 JP JP2018130055A patent/JP2020009918A/ja not_active Withdrawn
-
2019
- 2019-07-01 US US16/972,026 patent/US20210229297A1/en not_active Abandoned
- 2019-07-01 WO PCT/JP2019/026148 patent/WO2020013013A1/ja active Application Filing
- 2019-07-04 TW TW108123504A patent/TW202005764A/zh unknown
Also Published As
| Publication number | Publication date |
|---|---|
| WO2020013013A1 (ja) | 2020-01-16 |
| US20210229297A1 (en) | 2021-07-29 |
| TW202005764A (zh) | 2020-02-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101697839B1 (ko) | 비접촉 흡착반 | |
| TWI591744B (zh) | 電漿處理腔室中採用之真空密封裝置 | |
| US20160240414A1 (en) | Chuck for Suction and Holding a Wafer | |
| JPH10156780A (ja) | ワーク吸着装置 | |
| JP2018174302A (ja) | エンドエフェクタ | |
| US20040237244A1 (en) | Purge system for product container and interface seal used in the system | |
| US10607870B2 (en) | Substrate carrier for active/passive bonding and de-bonding of a substrate | |
| EP3605597B1 (en) | Silicon chip holding device, silicon chip conveying device, silicon chip delivery system and conveying method | |
| US20240287979A1 (en) | Gas control device | |
| JP2018041776A (ja) | チャックテーブル及び搬送パッド | |
| TWI637461B (zh) | 柔性工件的支撑件 | |
| WO2020013013A1 (ja) | 搬送用ハンド | |
| JP3252074B2 (ja) | 真空吸着装置、真空吸着装置用シール具および真空吸着方法 | |
| JP5932457B2 (ja) | チャックテーブル及びチャックテーブルを備える加工装置 | |
| CN108933099B (zh) | 用于操作衬底的设备 | |
| JP5329916B2 (ja) | 半導体ウエハの支持具 | |
| WO2020024837A1 (zh) | 用于操作衬底的设备 | |
| JP5202028B2 (ja) | 真空ピンセットおよびこれを用いた基板搬送装置ならびに基板処理装置 | |
| CN111149197B (zh) | 吸附平台 | |
| JP5316172B2 (ja) | ウェハ吸引パッド及びそれを備えたプリアライナ | |
| JP2005074551A (ja) | 真空吸着装置 | |
| CN217544568U (zh) | 晶圆吸附装置 | |
| CN218950418U (zh) | 一种真空产生装置 | |
| JP5105971B2 (ja) | 真空ピンセットおよびこれを用いた基板搬送装置ならびに基板処理装置 | |
| JP2004349619A (ja) | インターフェースシール |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210623 |
|
| A761 | Written withdrawal of application |
Free format text: JAPANESE INTERMEDIATE CODE: A761 Effective date: 20220314 |