以下、本発明の実施の形態について、図面を参照して詳細に説明する。なお、共通の構成要素については、共通の指示符号を図中に付して説明する。また、本発明は以下の例に限定されるものではなく、本発明の要旨を逸脱しない範囲で、任意に変更可能であることは言うまでもない。
図1は、本発明に係るレーザ距離計10の基本的な構成を示すブロック図である。
このレーザ距離計10は、光コム干渉計50と、光コム干渉計50により得られる第1の干渉光S3が入射される基準光検出器3と、光コム干渉計50により得られる第2の干渉光S4が入射される測定光検出器6と、基準光検出器3により得られる第1の干渉信号fb1と測定光検出器6により得られる第2の干渉信号fb2が入力される信号処理部7からなり、例えば、図3に示すような構成のレーザ距離計に適用される。
基準光検出器3は、光コム干渉計50から出射された第1の干渉光S3を受光して光電変換することにより、第1の干渉光S3から第1の干渉信号fb1を生成する。
また、測定光検出器6は、光コム干渉計50から出射された第2の干渉光S4を受光して光電変換することにより、第2の干渉光S4から第2の干渉信号fb2を生成する。
信号処理部7は、基準光検出器3により得られる第1の干渉信号fb1が入力される増幅回路31Aと、測定光検出器6により得られる第2の干渉信号fb2が入力される低利得増幅回路31Bと高利得増幅回路31Cを備えている。
増幅回路31Aは、基準光検出器3により生成された第1の干渉信号fb1を所定の利得A1で増幅する。この増幅回路31Aにより増幅された第1の干渉信号fb1Aは、A/D変換器32に供給される。
このレーザ距離計10において、基準光検出器3と増幅回路31Aは、上記光コム干渉計50により生成された第1の干渉光S3から第1の干渉信号fb1Aを生成する第1の干渉信号生成手段として機能する。
低利得増幅回路31Bは、測定光検出器6により生成された第2の干渉信号fb2を所定の利得A2で増幅する。この増幅回路31Bにより増幅された第2の干渉信号fb2Lは、A/D変換器32に供給される。また、高利得増幅回路31Cは、測定光検出器6により生成された第2の干渉信号fb2を、所定の利得A3で増幅する。この増幅回路31Cにより増幅された第2の干渉信号fb2Hは、A/D変換器32に供給される。
このレーザ距離計10において、測定光検出器6、低利得増幅回路31Bと高利得増幅回路31Cは、上記光コム干渉計50により生成された第2の干渉光S4から低利得の第2の干渉信号fb2Lと高利得の第2の干渉信号fb2Hを生成する第2の干渉信号生成手段として機能する。
さらに、このレーザ距離計10における信号処理部7は、基準光検出器3から増幅回路31Aを介して出力される第1の干渉信号fb1Aと測定光検出器6から低利得増幅回路31Bを介して出力される低利得の第2の干渉信号fb2Lとを位相比較する第1の位相比較器33Aと、測定光検出器6から高利得増幅回路31Cを介して出力される高利得の第2の干渉信号fb2Hとを位相比較する第2の位相比較器33Bを備える。
このレーザ距離計10において、第1の位相比較器33A及び第2の位相比較器33Bは、A/D変換器32によりデジタル化された第1の干渉信号fb1Aと低利得の第2の干渉信号fb2Lと高利得の第2の干渉信号fb2Hの位相比較をデジタル信号処理により行う。
第1の位相比較器33Aは、増幅回路31Aにより増幅された第1の干渉信号fb1と低利得の第2の干渉信号fb2Lとを位相比較することにより位相差情報を生成する第1の位相比較手段として機能する。この第1の位相比較器33Aにより得られる位相差情報は、第1の位相・距離情報出力部34Aを介して測定対象物5までの距離を示す第1の距離情報Dp1として出力される。
第2の位相比較器33Bは、第1の干渉信号fb1A と高利得の第2の干渉信号fb2Hとを位相比較することにより位相差情報を生成する第2の位相比較手段として機能する。この第2の位相比較器33Bにより得られる位相差情報は、第2の位相・距離情報出力部34Bを介して測定対象物5までの距離を示す第2の距離情報Dp2として出力される。
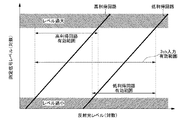
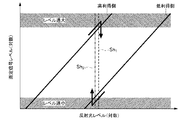
このレーザ距離計10において、光コム干渉計50から測定対象物5に測定光S2を照射して、測定光S2が測定対象物5により反射されて光コム干渉計50に入射される反射光S2’と光パワーレベル(反射光レベル)と、この反射光S2’が入射された光コム干渉計50から出射される第2の干渉光S4を検出する測定光検出器6により得られる第2の干渉信号fb2が低利得増幅回路31Bと高利得増幅回路31Cを介して出力される低利得の第2の干渉信号fb2Lと高利得の第2の干渉信号fb2Hの信号強度(測定信号レベル)の関係を図2に示す。
図2は、このレーザ距離計10における反射光レベルと測定信号レベルの関係を両対数表示した特性図である。
このレーザ距離計10では、測定光検出器6により得られる第2の干渉信号fb2を低利得増幅回路31Bと高利得増幅回路31Cにより利得の異なる2チャンネルの第2の干渉信号fb2すなわち低利得の第2の干渉信号fb2Lと高利得の第2の干渉信号fb2Hとすることにより、反射光レベルの低い領域では高い利得A3の高利得増幅回路31Cにより第2の干渉信号fb2を増幅して高利得の第2の干渉信号fb2Hを得ることができ、また、反射光レベルの高い領域では低い利得A2の低利得増幅回路31Aにより第2の干渉信号fb2を増幅して低利得の第2の干渉信号fb2Lを得ることができるので、反射光レベルに対する有効範囲拡大することができ、図2に示す高利得増幅回路31Cによる高利得回路有効範囲と低利得増幅回路31Bによる低利得回路有効範囲の両方を反射光レベルに対する有効範囲とすることができる。
なお、図2の縦軸に示す測定信号レベルは、信号周期の1波形分のデータの二乗和の積算により得られる信号の平均パワーであってもよい。
このように、レーザ距離計10では、光コム干渉計50により、基準光S1と測定光S2とを合波した第1の干渉光S3と、測定対象物5による上記測定光S2の反射光S2'と上記基準光S1とを合波した第2の干渉光S4を生成し、上記第1の干渉光S3と上記第2の干渉光S4との位相差から、上記測定対象物5までの距離を算出するにあたり、第1の干渉光S3から第1の干渉信号fb1Aを生成するとともに、上記第2の干渉光S4から低利得の第2の干渉信号fb2Lと高利得の第2の干渉信号fb2Hとを生成し、上記第1の干渉信号fb1Aと上記低利得の第2の干渉信号fb2Lとを位相比較するとともに、上記第1の干渉信号fb1Aと上記高利得の第2の干渉信号fb2Hとを位相比較し、上記第1の干渉信号fb1と上記低利得の第2の干渉信号fb2Lとの位相比較出力として得られる第1の位相差情報Dp1と、上記第1の干渉信号fb1と上記高利得の第2の干渉信号fb2Hとの位相比較出力として得られる第2の位相差情報Dp2を、上記測定対象物5までの距離を示す距離情報とすることにより、低反射材から高反射材まで連続的に反射光レベルのダイナミックレンジの広い距離計測を行うことができる。
すなわち、例えば、図3に示すレーザ距離計10のように、本件発明者等が先に提案した特許文献2に記載されているレーザ距離計に本発明を適用することにより、低反射材から高反射材まで連続的に反射光レベルのダイナミックレンジの広い距離計測を行うことができる。
上記第1及び第2の光源1,2は、それぞれ周期的に強度又は位相が変調され、互いに変調周期が異なる干渉性のある基準光S1と測定光S2を出射するものであって、それぞれ周期的に強度又は位相を変調され、互いに変調周期が異なる干渉性のある基準光S1と測定光S2を出射するための光変調器を備える2台の光源、光周波数コムモード間隔が異なる2台の光周波数コム発生器、或いは、光パルス繰り返し周波数が異なる2台のパルス源からなる。
上記第1及び第2の光源1,2は、それぞれ周期的に強度又は位相が変調され、互いに変調周期が異なる干渉性のある基準光S1と測定光S2を出射するものであって、それぞれ周期的に強度又は位相を変調され、互いに変調周期が異なる干渉性のある基準光S1と測定光S2を出射するための光変調器を備える2台の光源、光周波数コムモード間隔が異なる2台の光周波数コム発生器、或いは、光パルス繰り返し周波数が異なる2台のパルス光源からなる。
上記第1及び第2の光源1,2から出射された基準光S1と測定光S2は、半透鏡又は偏光ビームスプリッタからなる光混合素子11により混合されて重ね合わされ、半透鏡からなる光分離素子12により、上記基準光検出器3に向かう光と測定対象に向かう光に分離される。
ここでは、上記第1及び第2の光源1,2から出射された基準光S1と測定光S2は、互いに偏光面が直交してものとし、半透鏡からなる光混合素子11により混合され、その混合光が光分離素子12により反射されて偏光子13を介して上記基準光検出器3に入射されるとともに、上記光分離素子12を通過した混合光が偏光ビームスプリッタ14により偏光に応じて基準光S1と測定光S2に分離されて、上記基準光S1が基準面4に入射され、また、上記測定光S2が測定面5に入射されるようになっている。
なお、ここでは、上記第1及び第2の光源1,2から出射された基準光S1と測定光S2は、互いに偏光面が直交したものとしたが、上記光混合素子11として偏光ビームスプリッタを用いて、基準光S1と測定光S2の互いに偏光面が直交する成分を混合するようにしてもよい。
さらに、上記基準面4により反射された基準光S1’と、上記測定面5により反射された測定光S2’は、上記偏光ビームスプリッタ14により混合され、その混合光が上記光分離素子12により反射されて偏光子15を介して上記測定光検出器6に入射されるようになっている。
そして、上記基準光検出器3は、上記偏光子13を介して入射される上記基準光S1と測定光S2との混合光を受光することより、上記第1及び第2の光源1,2から出射された基準光S1と測定光S2の干渉光S3を検出するようになっている。
また、上記測定光検出器6は、上記偏光子15を介して入射される上記基準光S1’と上記測定光S2’の混合光を受光することにより、上記基準面4により反射された基準光S1’と上記測定面5により反射された測定光S2’の干渉光S4を検出するようになっている。
このレーザ距離計10では、図3中に太線で示す上記光混合素子11から偏光ビームスプリッタ14までの光路では、基準光S1と測定光S2が干渉しないように偏光を直交させてあり、上記偏光ビームスプリッタ14により上記基準光S1と測定光S2を偏光に応じて分離して上記基準面4と上記測定面5に入射させる。そして、上記基準面4と上記測定面5で反射された上記基準光S1’と測定光S2’を上記偏光ビームスプリッタ14により混合し、その混合光を上記光分離素子12により反射して上記測定光検出器6に入射させ、上記基準面4により反射された基準光S1’と上記測定面5により反射された測定光S2’の干渉光S4を上記測定光検出器6により検出する。
ここで、上記光混合素子11から偏光ビームスプリッタ14までの光路中に設けられた光分離素子12を介して基準光検出器3に導かれる混合光に含まれる基準光S1と測定光S2は偏光が直交しているため、そのまま上記基準検出器3に入射しても干渉信号が得られないので、偏光子13を挿入し、上記基準光S1と測定光S2の偏光に対して斜めになるように上記偏光子13の向きを調整しておくことにより、上記偏光子13の透過成分として上記基準光S1と測定光S2の成分が混合された干渉光S3が基準検出器3に入射されるようにして、上記基準検出器3により干渉信号を得るようにしている。同様に、上記光分離素子12を介して測定光検出器6に導かれる混合光に含まれる基準光S1’と測定光S2’は偏光が直交しているため、そのまま上記測定検出器6に入射しても干渉信号が得られないので、偏光子15を挿入し、上記基準光S1’と測定光S2’の偏光に対して斜めになるように上記偏光子15の向きを調整しておくことにより、上記偏光子15の透過成分として上記基準光S1’と測定光S2’の成分が混合された干渉光S4が測定光検出器6に入射されるようにして、上記測定検出器6により干渉信号を得るようにしている。なお、偏光子に替えて半波長板と偏光ビームスプリッタを用いてもよい。
上記基準光検出器3によって得られる干渉信号は、キャリア周波数が上記第1及び第2の光源1,2から出射された基準光S1と測定光S2のキャリア光周波数の差であり、上記基準光S1と測定光S2の光パルス繰り返し周波数の差の周波数で同じ干渉波形が繰り返される。
このレーザ距離計10において、上記基準光検出器3の役割は、遅延時間計測の基準を生成することである。上記第1及び第2の光源1,2から出射された基準光S1と測定光S2は、繰り返し周波数が等しくないので、光源が動作を開始した時にタイミングがずれていても、少しずつタイミングがずれていき、必ずどこかで基準光S1の光パルスと測定光S2の光パルスが重なる瞬間が現れる。また、その重なる瞬間は基準光S1と測定光S2の繰り返し周波数の差の繰り返し周波数で周期的に現れる。この光パルスと光パルスの重なる瞬間が、遅延時間計測の基準となる。
また、測定光検出器6によって得られる干渉信号は、上記基準光検出器3によって得られる干渉信号と同じくキャリア周波数が基準光S1’と測定光S2’のキャリア光周波数の差であり、上記基準光S1と測定光S2の光パルス繰り返し周波数の差と同じ繰り返し周波数を持つ。しかし、上記測定光検出器6に入力される光パルスは、基準反射鏡4までの距離L1と測定反射鏡5までの距離L2の距離差の絶対値(L2−L1)の分だけ、光パルスのタイミングが遅れるため、光パルスと光パルスの重なる瞬間が上記基準光検出器3によって得られる干渉信号と比較して遅れる。この遅れ時間が上記距離差の絶対値(L2−L1)の2倍の距離を光パルスが伝搬することによる遅延時間であり、真空中の光速Cをかけて屈折率ngで割ることにより距離が得られる。
このように、周期の異なる2台のパルス光源の干渉によって距離計測を行う場合、時間基準を与える干渉信号の基準光検出器3が不可欠であり、基準光検出器3と測定光検出器6により得られる各干渉信号の時間差を比較することによって初めて距離測定が可能となる。
そこで、レーザ距離計10において、上記信号処理部7は、上記基準光検出器3により上記干渉光S3を検出して得られる干渉信号と上記測定光検出器6により上記干渉光S4を検出して得られる干渉信号の時間差から、光速と測定波長における屈折率から上記基準面4までの距離L1と上記測定面5までの距離L2の距離差の絶対値(L2−L1)を求める処理を行う。
すなわち、このレーザ距離計10では、第1及び第2の光源1,2から出射されるそれぞれ周期的に強度又は位相が変調され、互いに変調周期が異なる干渉性のある基準光S1と測定光S2を基準面4と測定面5に照射し、上記基準面4と測定面5に照射する基準光S1と測定光S2との干渉光S3を基準光検出器3により検出するとともに、上記基準面4により反射された基準光S1’と上記測定面5により反射された測定光S2’との干渉光S4を測定光検出器6により検出し、上記信号処理部7により、上記基準光検出器3により干渉光S3を検出した干渉信号と上記測定光検出器6により干渉光S4を検出した干渉信号の時間差から、光速と測定波長における屈折率から上記基準面4までの距離と上記測定面5までの距離の差を求める。
ここで、このレーザ距離計10における距離測定の原理について説明する。
距離測定の原理は、光パルスの時間遅延から距離を求める距離計に準ずる。すなわち、距離(L2−L1)を往復する際の時間遅延ΔT=2×ng×(L2−L1)/cを計測して、光路の群屈折率ng、真空中の光速cから(L2−L1)を計算する。
包絡線波形f(t)、キャリア周波数ω
0=2πf
0の光パルスは、次のように表わすことができる。
この光パルスを基準パルスとすると、基準パルスのフーリエ変換は、包絡線パルスf(t)のフーリエ変換F(ω)を用いて、次の(1)式で表わされる。
フーリエ変換の演算をFFT[ ]で表した。そして、基準パルスが、測定距離の伝搬による遅延の影響を受けたとすると、遅延パルスの波形とそのフーリエ変換は、次の(2)式の形で表わされる。
ここで、時間ΔTは遅延時間である。絶対距離を測るためには時間軸の包絡線の時間波形f(t−ΔT)からΔTを求めるか、(2)式の右辺のB項で示される周波数軸の位相特性e−jBを求めればよい。ωは角周波数でありfを周波数としてω=2πfの関係がある。(2)式の左辺のjA項は、キャリア成分の位相シフトを表す。この項は、光の半波長の距離で2πラジアン変化する感度の高い成分であり、変位測定に用いられる。
距離測定の分解能を1μmより高めるためには、包絡線の時間波形f(t−ΔT)又は周波数軸の位相特性e−jBから遅延時間ΔTを求めるための時間分解能をフェムト秒のオーダーに高めなければならない。電気回路の周波数帯域の上限が数十GHzであることを考えると困難である。そこで、互いに変調周期が異なる干渉性のある基準光S1と測定光S2を発生する2つの光源を用意して干渉させ、電気的に処理が可能な周波数に落として遅延時間ΔTを計測するのがレーザ距離計10による距離測定の方法である。
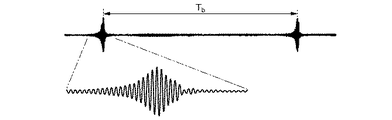
測定距離(L2−L1)に比例する基準光パルスP1と測定光パルスP2の時間ΔTの測定を、互いに変調周期の異なる干渉性のある2台のパルス光源の干渉によって行う場合の模式図を図4の(A),(B)に示す。
図4の(A)は基準光検出器3が受光する光パルス列を表す。S1,S2は、それぞれ基準光パルスと測定光パルスの包絡線の時間波形である。繰り返し周波数は基準光パルスS1がfm+Δfm、測定光パルスS2がfmであると仮定する。繰り返し周期はS1がT’=1/(fm+Δfm)、S2がT=1/fmである。重なったパルスを基準に計測した時刻をそれぞれの繰り返し周期で規格化した値をNとすると、S1とS2のパルスはそれぞれのNが整数の時刻にN番目のパルスが検出器に到着することになる。S1とS2のN番目のパルスの到着時刻を比較すると、パルス列の周期の違い(T−T’)のN倍の時間だけ基準光パルスS1が先に到着する。パルス到着時間のずれはNに比例して大きくなり、あるN番目のパルスでは、(T−T’)N=Tとなり、N番目の基準光パルスS1がN−1番目の測定光パルスS2に追い付いて同じ時刻に到着する。
S
1、S
2のタイミングが一致するまでのパルスの個数Nは、次の(3)式により求められる。
S
1とS
2の干渉信号は、互いのパルスが重なり合うタイミングで発生する。したがって、干渉信号の周期T
bは、次の(4)式で表され、2つのパルス列の繰り返し周波数差Δf
mの逆数に等しい。
また、S1,S2はそれぞれ一定の繰り返し周波数を持つパルス列であるから、干渉信号も一定の周期Tbで同じ波形を繰り返す。繰り返し周波数差Δfmが大きすぎると光パルスが重なり合う時間が短くなるため干渉信号がとりにくくなる。それを避けるためΔfm<<fmのように繰り返し周波数差を設定する。
また、図4の(B)は、測定光検出器6が受光するパルス列を表す。図4の(A)に示すパルスと比較して、測定光パルスS
2が光路長(L
2−L
1)を往復したことによる時間ΔTだけ遅れて到着している。この場合、S
1とS
2のパルスが重なる番号N’は、N’に比例して大きくなる周期のずれとΔTの和が測定光パルスの周期Tに一致した瞬間であり、次の(5)式で表わすことができる。
ただし、δ=ΔTfmである。ΔTが0から測定光パルスの繰り返し周期Tまで変化する間にδは0〜1まで直線的に変化する。
測定光検出器の受光パルスS
1,S
2が重なる時間を基準光検出器が受光するパルスが重なるN=0の時刻を基準に計測するとその時刻は次の(7)式で示されるN’T’で与えられる。
δが測定光パルスの1周期の間で0から1まで変化するとN’T’はTb〜0まで直線的に変化する。遅延時間ΔTがあっても、0〜Tbまでの間に必ず1か所S1パルスがS2パルスを追い越していく時刻が存在するため、0〜Tbの間で必ず干渉信号が得られる。N=0の時刻で発生する基準光検出器の干渉信号と遅延時間ΔTのために遅れて発生する測定光検出器の干渉信号の時刻を比較することによって遅延時間ΔTが求められる。
例えば、基準光パルスの繰り返し周波数を25GHz+100kHz、測定光パルスの繰り返し周波数を25GHzとすると、ΔTが0〜40psの範囲で変化すると、干渉信号の発生時刻は10μs〜0の間で変化する。40psの時間内で起こる変化を10μsの時間幅に引き伸ばして計測できる。1フェムト秒の時間差であっても250psとして観測できるため、直接フェムト秒の分解能で時間計測を行うよりもはるかに低い周波数帯域の電気回路で取り扱うことができる。
測定光パルスに与えられる時間遅延の符号とビート信号の時間遅延の符号の関係は、S1とS2の繰り返し周波数とキャリア周波数の大小関係に依存する。
図5の(A)は、光スペクトルの模式図である。S1は基準光のスペクトル、S2は測定光のスペクトルを表す。S1、S2は光パルスの繰り返し周波数に一致したコム状のモードを持っており、モード間隔はそれぞれS1がfm+Δfm、S2がfmである。図5の(A)では、スペクトル中央のモードを中心にモード番号を付け、N=0のモード間の干渉信号の周波数をfaと仮定している。S1とS2の干渉波形にはさまざまなモード間の差周波数が含まれるが、同じモード番号間の差周波数が最も低い周波数帯に現れるため、適当な周波数帯域の光検出器を使用すると高い差周波数成分は検出信号から除外される。この場合、同じモード番号の干渉波形だけがビート信号として光検出器から取り出される。
また、図5の(B)は、ビート信号スペクトルの模式図である。周波数faを中心にΔfm間隔のコム状の電気信号スペクトルが得られる。ビート信号の時間波形は各周波数成分を重ね合わせたものである。周波数軸の位相特性e−jBを求めるためには、基準光検出器の出力ビート信号のスペクトルから基準となる位相特性を求め、同時に測定光検出器の出力ビート信号スペクトルから求められる位相特性を求め、それらを比較する。光分離素子12までの光路差に依存するビート信号スペクトルの位相特性は共通なので、比較によって得られる位相特性の違いは測定距離(L2−L1)の伝搬によるものである。測定光スペクトルと基準光スペクトルの各モードの位相差情報が、ビート信号スペクトルの各モード番号の位相に反映される。ビート信号スペクトルのモード番号と位相の関係を測定光スペクトルのモード番号と位相差の関係に置き換えて光周波数と位相差の関係ωΔTを求め、その直線をωで微分して得られる係数からΔTを求める。
光コム干渉による距離測定をビート信号の周波数解析により行うと、光スペクトルが持つ広い帯域をΔfm/fmに圧縮して電気的に解析できるため、光パルスの往復時間を計測する距離計でありながら高い分解能を得ることができる。
計測に必要な時間は、干渉信号の1周期TbであるΔfを100kHzとすると周期Tbは10μsであり、短時間に距離を測定することができる。
したがって、このような構成のレーザ距離計10では、第1及び第2の光源1,2から出射されるそれぞれ周期的に強度又は位相が変調され、互いに変調周期が異なる干渉性のある基準光S1と測定光S2を基準面4と測定面5に照射し、上記基準面4と測定面5に照射する基準光S1と測定光S2との干渉光S3を基準光検出器3により検出するとともに、上記基準面4により反射された基準光S1’と上記測定面5により反射された測定光S2’との干渉光S4を測定光検出器6により検出する光コム干渉計50を備え、上記信号処理部7により、上記基準光検出器3により干渉光S3を検出した干渉信号と上記測定光検出器6により干渉光S4を検出した干渉信号の時間差から、光速と測定波長における屈折率から上記基準面4までの距離と上記測定面5までの距離の差を求めることにより、長い距離を高い精度でしかも短時間に測定することができる。
ここで、上記レーザ距離計10における第1及び第2の光源1,2としては、例えば、モード周波数間隔が異なる2台の光周波数コム発生器、あるいは、それぞれ周期的に強度又は位相が変調されかつキャリア周波数が安定化された2台の光源などを用いることができる。
距離計としての性能は、基準光S1と測定光S2ほぼ出射する上記第1及び第2の光源1,2の性能で決定される。距離測定の分解能は光スペクトル幅または光パルス幅に依存しており、光スペクトルの幅が広い、または光パルスの幅が狭いほど距離測定の分解能を高くすることができる。また、絶対距離測定の確度は光コムモードの周波数間隔または光パルスの繰り返し周波数の確度に依存している。マイクロ波の絶対周波数確度が高いほど絶対距離測定の確度を高めることができる。さらに測定値のばらつきはfmやfm+Δfmの安定度に依存する。
また、上記レーザ距離計10では、2台の光源1、2から出射される光の干渉を使って距離の測定を行うので、上記第1及び第2の光源1、2は、光コムモード間隔または光パルス繰り返し周波数または変調周期が異なりかつ干渉性の良いものでなければならない。
独立に発振するパルスレーザは、通常レーザ発振の中心周波数や繰り返し周波数がばらばらであり、その変動に相関がない。したがって2台の独立したパルスレーザを使用して距離計測を行う場合、精度を高めるためには、発振波長や光位相、パルスの繰り返し周波数を相対的に固定することが重要である。
外部変調された2台の光源または2台の光周波数コム発生器を使用すると距離計の要求を満たす光源を比較適容易に実現できる。特に、2台の発振器の同期をとった光周波数コム発生器は、互いに干渉性が良い、繰り返し周波数が安定、スペクトルの広がりが大きくパルス幅が短い、といった特徴を持つため、このレーザ距離計10に最適な光源である。
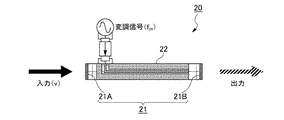
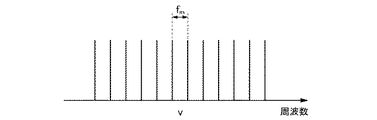
なお、光周波数コム発生器20は、例えば、図6に示すように、一対の反射鏡21A,21Bで構成される光共振器21の内部に光位相変調器22を挿入してなるもので、単一周波数の連続波(周波数:ν)の光を入力し、光共振器21の自由スペクトル域(FSR)の整数倍に一致した周波数で光位相変調器22を駆動すると、光共振器21内の多重往復の周期と変調信号周期の同期がとれるため共振器のない光位相変調器と比べて極めて効率の良い変調が行われ、サイドバンドの本数は数百から数千本に達し、数テラヘルツのスペクトル広がりを持つ光周波数コムを出力として得ることができる。光周波数コム発生器20では、時間的にも短いパルスを発生することが可能で、時間幅1ピコ秒以下の光パルスを発生することができる。光周波数コム発生器20の出力は、中心周波数が入力周波数と等しく周波数間隔が変調周波数に等しいコム(櫛)状の光であり、図7に示すように、時間軸では、繰り返し周波数がfmであるパルス列である。変調指数を上げてスペクトルの広がりを大きくするほど時間幅の短いパルスを得ることができる。
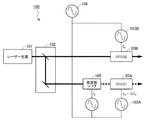
ここで、上記レーザ距離計10における第1、第2の光源1,2として2台の光周波数コム発生器を使用する場合、例えば、図8に示すような構成の光源100とされる。
すなわち、この光源100では、1台の単一周波数発振のレーザ光源101から出射されるレーザ光がビームスプリッタ102により分割されて2台の光周波数コム発生器(OFCG1、OFCG2)20A,20Bに入力されるようになっている。
2台の光周波数コム発生器20A,20Bは、互いに異なる周波数fm+Δfmと周波数fmで発振する発振器103A,103Bにより駆動される。それぞれの発振器103A,103Bは、共通の基準発振器104により位相同期されることにより、fm+Δfmとfmの相対周波数が安定になる。光周波数コム発生器(OFCG1)20Aの前には、音響光学周波数シフタ(AOFS)のような周波数シフタ105を設けて、入力されたレーザ光にこの周波数シフタ105により周波数faの光周波数シフトを与えるようになっている。これにより、キャリア周波数間のビート周波数が直流信号ではなく周波数faの交流信号になる。その結果、キャリア周波数の高周波側サイドバンドのビート信号と低周波側サイドバンドのビート信号がビート信号のキャリア周波数間のビート周波数faを挟んで相対する周波数領域に発生するため位相比較に都合が良い。
上記光源100を構成している2台の光周波数コム発生器(OFCG1、OFCG2)20A,20Bは、図9の(A),(B)に示すような周波数の光周波数コムを出力する。
すなわち、光周波数コム発生器(OFCG2)20Bの出力は、図9の(A)に示すように、中心にfmの周波数間隔でコム状のモードが並ぶ。光周波数コム発生器(OFCG1)20Aの出力は、図9の(B)に示すように、周波数ν+faを中心にfm+Δfmの周波数間隔でコム状のモードが並ぶ。
このような構成の光源100を上記第1、第2の光源1,2として備えたレーザ距離計10において、基準光検出器3の入力前で重ね合わされたn次モードの電界の振幅e
n(t)は、次の(8)式で表される。
ここで、ERnは、光周波数コム発生器(OFCG1)20Aから出射される基準光S1の電界を表し、ETnは、光周波数コム発生器(OFCG2)20Bから出射される測定光S2の電界を表す。次数の異なるモード間の干渉信号は、変調周波数fmとその周辺に現れる。したがって、光検出器の帯域をfaやΔfに比べて十分広いがfmより小さくとるか、フィルタを使用して高周波成分を取り除くと、同じ次数のモード間のビート周波数だけが残る。θnはn次モードの位相差である。基準光n次モードの位相を基準にした測定光n次モードの相対位相を表している。
また、光検出器の出力電流i
n(t)は、aを係数として、次の(9)式にて表すことができる。
(9)式のθnを与える時間遅延は、基準光検出器3の場合、ビームスプリッタ102で光を分離してから光混合素子11で重ね合わせられるまでの光路差や信号ケーブルの長さに依存する。この時間遅延は、基準光検出器3と測定光検出器6に共通であるため、測定光検出器6の出力のθnから基準光検出器3の出力のθnを差し引くことにより取り除かれる。光検出器からの出力電流の時間波形は、すべてのn次の電流を重ねた結果でありΣin(t)にて表すことができる。出力電流の波形は、キャリア周波数faの信号がΔfmの周期で変調された波形であり、θnは包絡線の時刻を決める。時間的には、基準光検出器3の出力のビート信号の発生時刻と測定光検出器6の出力のビート信号の発生時刻を比較することによってθnの影響を取り除くことができる。測定光検出器6の出力のθnをθn’とすると、基準光検出器3と測定光検出器6による検出として得られる各干渉信号の時間差は、周波数軸では(θn’−θn)のnに対する変化率である。したがって、(θn’−θn)を各モードに対して求めると距離(L2−L1)を求めることができる。
ここで、基準光検出器3による検出として得られる干渉信号を波形観測して得られた波形例を図10に示す。fm=25GHz、Δf=100kHz、fa=40MHzの光コム発生器(OFCG1、OFCG2)20A、20Bを使用した場合である。周期Tbが10μsecで40MHzのキャリアが強度変調された波形の干渉信号となっている。
このレーザ距離計10では、距離(L2−L1)が変化すると、測定光検出器6による検出出力として得られた信号のタイミングが変化するので、その時間差(位相差)を測れば距離(L2−L1)を求めることができる。
そして、このレーザ距離計10において、基準光S1と測定光S2とを合波した第1の干渉光S3と、測定対象物5による上記測定光S2の反射光S2'と上記基準光S1’とを合波した第2の干渉光S4との位相差から、上記測定対象物5までの距離を算出するにあたり、図1に示すような構成の信号処理部7が用いられる。
信号処理部7では、第1の干渉光S3が入射される基準光検出器3による検出出力を増幅回路31Aにより利得A1で増幅した結果として第1の干渉信号fb1を得るとともに、第2の干渉光S4が入射される測定光検出器6による検出出力を低利得増幅回路31Bと高利得増幅回路31Cにより低利得A2と高利得A3で増幅した結果として低利得の第2の干渉信号fb2Lと高利得の第2の干渉信号fb2Hを得て、第1の干渉信号fb1と低利得の第2の干渉信号fb2Lとを第1の位相比較器33Aにより位相比較するとともに、第1の干渉信号fb1と高利得の第2の干渉信号fb2Hとを第2の位相比較器33Bにより位相比較して、第1の位相比較器33Aによる第1の干渉信号fb1と低利得の第2の干渉信号fb2Lとの位相比較出力として得られる第1の位相差情報と、第2の位相比較器33Bによる第1の干渉信号fb1と高利得の第2の干渉信号fb2Hとの位相比較出力として得られる第2の位相差情報を、測定対象物5までの距離を示す距離情報とすることにより、低反射材から高反射材まで連続的に反射光レベルのダイナミックレンジの広い距離計測を行うことができる。
このレーザ距離計10における信号処理部7は、FPGA、DSPなどのハードウエアで構成することができ、また、PC上のソフトウエアにより実現することもできる。また、信号処理部7が備える第1,第2の位相比較器33A、33Bの機能は、フーリエ変換の演算機能や、位相差計算方法による演算でも良く、また、同等な効果が得られる相互相関法による演算であってもよい。
なお、本発明適用した図3のブロック図に示したレーザ距離計10では、信号処理部7により、基準光検出器3により干渉光S3を検出した干渉信号と測定光検出器6により干渉光S4を検出した干渉信号の時間差(位相差)から、光速と測定波長における屈折率から基準面4までの距離L1と測定面5までの距離L2の差を求めるようにしたが、基準面4までの距離L1に相当する光路長差を基準光S1と測定光S2との間に与える基準光路を基準面4に代わりに備えるようにしても良い。
ここで、図1のブロック図に示した本発明に係るレーザ距離計10の基本的の構成では、光コム干渉計50により得られる第1の干渉光S3と第2の干渉光S4が入射される信号処理部7において、第2の干渉光S4を検出する1つの測定光検出器6による検出出力を低利得増幅回路31Bと高利得増幅回路31Cにより低利得A2と高利得A3で増幅した結果として低利得の第2の干渉信号fb2Lと高利得の第2の干渉信号fb2Hを得るようにしているが、図11のブロック図に示すレーザ距離計10Aのように、光コム干渉計50により得られる第2の干渉光S4を測定光分配器35により所定の分配比で2つの測定光検出器6A、6Bに供給し、2つの測定光検出器6A、6Bにより得られる第2の第2の干渉信号fb2L,fb2Hを低利得増幅回路31Bと高利得増幅回路31Cにより増幅するように構成してもよい。
このレーザ距離計10Aにおける信号処理部7Aでは、例えば、1:1の分配比の測定光分配器35を備える場合、測定光分配器35により分配された互いに等しい信号レベルの第2の第2の干渉信号fb2を低利得増幅回路31Bと高利得増幅回路31Cにより低利得A2と高利得A3で増幅した結果として低利得の第2の干渉信号fb2Lと高利得の第2の干渉信号fb2Hを得ることができ、また、1:N(Nは1よりも大きい正数)の分配比の測定光分配器35を備える場合には、互いに等しい利得の低利得増幅回路31Bと高利得増幅回路31Cにより、低利得の第2の干渉信号fb2Lと高利得の第2の干渉信号fb2Hを得ることができ、上記第1の干渉信号fb1と上記低利得の第2の干渉信号fb2Lとの位相比較出力として得られる第1の位相差情報Dp1と、上記第1の干渉信号fb1と上記高利得の第2の干渉信号fb2Hとの位相比較出力として得られる第2の位相差情報Dp2を、上記測定対象物5までの距離を示す距離情報とすることにより、低反射材から高反射材まで連続的に反射光レベルのダイナミックレンジの広い距離計測を行うことができる。
このレーザ距離計10Aでは、基準光検出器3と増幅回路31Aが光コム干渉計50により生成された第1の干渉光S3から第1の干渉信号fb1Aを生成する第1の干渉信号生成手段として機能し、測定光分配器35、第1の測定光検出器6A、第2の測定光検出器6B、低利得増幅回路31Bと高利得増幅回路31Cが光コム干渉計50により生成された第2の干渉光S4から低利得の第2の干渉信号fb2Lと高利得の第2の干渉信号fb2Hを生成する第2の干渉信号生成手段として機能する。
このレーザ距離計10Aにおける他の構成要素については、図1のブロック図に示したレーザ距離計10の同じ符号を付した構成要素と同じであるので、説明を省略する。
なお、本発明に係るレーザ距離計10,10Aでは、第1の位相比較器33Aと第2の位相比較器33Bにおいて、低利得増幅回路31Bと高利得増幅回路31Cにより得られる低利得の第2の干渉信号fb2Lと高利得の干渉信号fb2Hを同時に第1の干渉信号fb1と位相比較するので、第1の位相比較器33Aと第2の位相比較器33Bに入力される第2の干渉信号fb2に時間的なずれが発生しないように、対策をとることが好ましい。
すなわち、ここで、低利得増幅回路31Bと高利得増幅回路31Cにより得られる低利得の第2の干渉信号fb2Lと高利得の干渉信号fb2Hとの遅延時間の誤差、すなわち、位相・距離のオフセットΔLは、図12に示すように、それぞれの回路の遅延時間の差、光ファイバの長さの違い、干渉信号を伝送する電線の長さの違いなどによって生ずる。
低利得の第2の干渉信号fb2Lと高利得の干渉信号fb2Hとの遅延時間の誤差は、物理的な信号経路長の調整による方法、データのサンプリング時刻にオフセットを与える方法、位相比較器に入力する波形の位置をずらす方法、二つの位相比較器出力の位相にオフセットを与える方法などで補正できる。
低利得の第2の干渉信号fb2L、高利得の干渉信号fb2Hがともに有効な入力レベルで同時に取得された位相・距離の値から両者のオフセットを求めることが望ましい。位相は、係数をかけることにより距離に変換することができる。
例えば、図13のブロック図に示すレーザ距離計10Bや図14のブロック図に示すレーザ距離計10Cでは、このオフセット値がゼロになるようにハード的な経路長により遅延時間は遅延位相を調整する遅延調整器37A,37Bが設けられている。
すなわち、図13のブロック図に示すレーザ距離計10Bのように、高利得増幅回路31Bにより増幅された高利得の第2の干渉信号fb2Hが遅延調整器37Aを介してA/D変換器32に入力させるように構成した信号処理部7Bを備えるものとすることにより、低利得増幅回路31Bにより増幅された低利得の第2の干渉信号fb2Lと高利得増幅回路31Bにより増幅された高利得の第2の干渉信号fb2Hとの遅延時間差又は位相差を調整する遅延調整手段としてアナログの遅延調整器37Aを機能させることで、第1の位相比較器33Aと第2の位相比較器33Bに入力される第2の干渉信号fb2に時間的なずれが発生しないようにすることができ、低反射材から高反射材まで連続的に反射光レベルのダイナミックレンジの広い距離計測を高精度に行うことができる。
アナログの遅延調整器37Aとしては、例えば、機械的に導波管の長さを変える位相調整器を利用できる。
遅延調整器37Aは、低利得増幅回路31Bの出力側に入れても良い。また、高利得増幅回路31Cの出力側と低利得増幅回路31Bの出力側の両方に入れても良い。
このレーザ距離計10Bにおける他の構成要素については、図1のブロック図に示したレーザ距離計10の同じ符号を付した構成要素と同じであるので、説明を省略する。
また、図14のブロック図に示すレーザ距離計10Cのように、A/D変換器32の後段に遅延調整器37Bを設けて、第2の位相比較器33Bに入力される高利得の第2の干渉信号fb2Hの遅延量をデジタル処理により調整するように構成した信号処理部7Cを備えるものとしても良い。なお、このレーザ距離計10Cにおける他の構成要素については、図1のブロック図に示したレーザ距離計10の同じ符号を付した構成要素と同じであるので、説明を省略する。
このレーザ距離計10Cにおいても、第1の位相比較器33Aと第2の位相比較器33Bに入力される第2の干渉信号fb2に時間的なずれが発生しないようにすることができ、低反射材から高反射材まで連続的に反射光レベルのダイナミックレンジの広い距離計測を高精度に行うことができる。
また、図15のブロック図に示すレーザ距離計10Dのように、信号処理部7Dにおいて、A/D変換器32にサンプリング位相調整器37Cを設けて、サンプリング周期は同一にしたままサンプリング位相調整器37Cによりサンプリング・クロックの位相にオフセットを与えてサンプリング時刻にずれを与えることにより、A/D変換器32における低利得の第2の干渉信号fb2Lのサンプリングと高利得の第2の干渉信号fb2Hのサンプリングの同期をとるように構成した信号処理部7Dを備えるものとしても良い。
サンプリング位相調整器37Cは、低利得の第2の干渉信号fb2Lのチャンネル側に入れてもよい。また、低利得の第2の干渉信号fb2Lのチャンネル側と高利得の第2の干渉信号fb2Hのチャンネル側の両方に入れてもよい。
なお、このレーザ距離計10Dにおける他の構成要素については、図1のブロック図に示したレーザ距離計10の同じ符号を付した構成要素と同じであるので、説明を省略する。
このレーザ距離計10Dにおいても、第1の位相比較器33Aと第2の位相比較器33Bに入力される第2の干渉信号fb2に時間的なずれが発生しないようにすることができ、低反射材から高反射材まで連続的に反射光レベルのダイナミックレンジの広い距離計測を高精度に行うことができる。
さらに、図16のブロック図に示すレーザ距離計10Eのように、信号処理部7Eにおいて、第1の位相比較器33Aの出力側に位相調整器37Dを設けて、回路の特性の違いなど最後まで取り切れない誤差を位相・距離のオフセット補正により取り除くこともできる。位相調整器37Dは、第1の位相比較器33Aで得られる位相値にオフセット値を加減算することにより、位相調整を行う。
位相調整器37Dは、第2の位相比較器33Bの出力側にて設けてもよい。また、第1の位相比較器33Aの出力側と第2の位相比較器33Bの出力側の両方に設けてもよい。
また、このレーザ距離計10Eでは、得られたオフセット値を信号処理部7のROM等に記録しておくことで、位相調整器37Dによる位相調整を行うことができる。PCのソフトウエアで信号処理を行う場合はソフトウエアの初期値として読み込ませることも可能である。
なお、サンプリング周期が十分短ければデジタルデータの計算範囲をずらすことで遅延の調整を行うようにすることもできる。
なお、このレーザ距離計10Eにおける他の構成要素については、図1のブロック図に示したレーザ距離計10の同じ符号を付した構成要素と同じであるので、説明を省略する。
このレーザ距離計10Eにおいても、第1の位相比較器33Aと第2の位相比較器33Bに入力される第2の干渉信号fb2に時間的なずれが発生しないようにすることができ、低反射材から高反射材まで連続的に反射光レベルのダイナミックレンジの広い距離計測を高精度に行うことができる。
本発明に係るレーザ距離計10,10A〜10Eにおいて、第1の位相・距離情報出力部34Aと第2の位相・距離情報出力部34Bを介して出力される測定対象物5までの距離を示す第1の距離情報Dp1と第2の距離情報Dp2は、これらの情報を使用する後段の処理装置におけるソフトウエアにより判定、選択される。
使用する第1の距離情報Dp1と第2の距離情報Dp2の判定、選択には、以下の情報が単独または複数用いられる。
・信号強度(二乗和):信号強度が一定の範囲に入っていれば有効。
・信号振幅:信号振幅が一定の範囲に入っていれば有効。
・信号波形のパワー分布:信号波形のパワー分布が基準信号に類似(誤差が一定以内)していれば有効。
・基準信号波形との相関値:基準信号との相関値が高ければ有効。
また、図17のブロック図に示すレーザ距離計10Fのように、使用する第1の距離情報Dp1と第2の距離情報Dp2の判定、選択に必要な情報を付加情報Daddとして出力する付加情報生成部38を備える構成とすることもできる。
付加情報生成部38では、信号強度を次のようにして求める。
すなわち、A/D変換器32の出力側において第1の位相比較器33Aに入力される低利得の第2の干渉信号fb2L、または第2の位相比較器33Bに入力される高利得の第2の干渉信号fb2Hの値の二乗を信号の一周期分積算することにより、信号強度に比例する値を得ることができる。
第2の干渉信号fb2が交流信号として与えられる場合には、第1の位相比較器33Aに入力される低利得の第2の干渉信号fb2L、または第2の位相比較器33Bに入力される高利得の第2の干渉信号fb2HのDCオフセットを除去した値の二乗を信号の一周期分積算すると信号強度に比例する値が得られる。 また、交流信号の包絡線の強度最大値は、低利得の第2の干渉信号fb2L、または高利得の第2の干渉信号fb2Hの値のヒルベルト変換により元の波形の直交位相成分を求め、元の波形とヒルベルト変換波形の二乗和により得られる包絡線の二乗波形のピーク値から求められる。
また、付加情報生成部38では、信号振幅を次のようにして求める。
すなわち、第2の干渉信号fb2が交流信号として与えられる場合には、第1の位相比較器33Bに入力される低利得の第2の干渉信号fb2L、または第2の位相比較器33Cに入力される高利得の第2の干渉信号fb2Hの信号波形の最大ピーク値から最小ピーク値を引いた値を信号振幅とする。
また、交流信号の包絡線の振幅最大値は、低利得の第2の干渉信号fb2L、または高利得の第2の干渉信号fb2Hのヒルベルト変換により元の波形の直交位相成分を求め、元の信号とヒルベルト変換波形の二乗和により包絡線の二乗波形を求め、そのピーク値の平方根から求められる。
また、付加情報生成部38では、信号波形のパワー分布を次のようにして求める。
すなわち、信号の一周期を有限の複数の区間に分けて各区間の信号強度を計算する。パワー分布を求めるためには区間の時間幅は想定される測定信号波形のメインローブの時間幅と同じ幅かやや狭い幅に設定することが望ましい。
基準信号と測定信号で信号振幅のピーク値が中央で一致するように波形の位置を合わせてからそれぞれパワー分布を計算する。
さらに、付加情報生成部38では、基準信号波形との相関値を次のようにして求める。
すなわち、正規化した相互相関を計算する。
測定信号の波形が基準信号の相似形ならば最大値1の鋭いピークが得られる。波形が雑音に埋もれている、波形が歪んでいる、など異常な領域にあるとピーク値が1より小さくなる。
このレーザ距離計10Fでは、このようにして付加情報生成部38により生成される付加情報Daddを出力するので、後段の処理装置において使用すべき第1の距離情報Dp1又は第2の距離情報Dp2を付加情報Daddに基づいて簡単に且つ適切に判定、選択することができる。
なお、このレーザ距離計10Fにおける他の構成要素については、図1のブロック図に示したレーザ距離計10の同じ符号を付した構成要素と同じであるので、説明を省略する。
このレーザ距離計10Fにおいても、第1の位相比較器33Aと第2の位相比較器33Bに入力される第2の干渉信号fb2に時間的なずれが発生しないようにすることができ、低反射材から高反射材まで連続的に反射光レベルのダイナミックレンジの広い距離計測を高精度に行うことができる。
さらに、図18のブロック図に示すレーザ距離計10Gのように、付加情報生成部38により生成される付加情報Daddに基づいて後段の処理装置において使用すべき第1の距離情報Dp1又は第2の距離情報Dp2を選択的に出力する出力情報選択部39が設けられた信号処理部7Gを備える構成とすることもできる。
レーザ距離計10Gにおいて、信号処理部7Gに設けられた出力報選択部39は、付加情報生成部38により生成される付加情報Daddに基づいて、第2の距離情報Dp2から第1の距離情報Dp1に切り換えるための第1の閾値sh1と第1の距離情報Dp1から第2の距離情報Dp2に切り換えるための第2の閾値sh2を決定して、第1の距離情報Dp1又は第2の距離情報Dp2を選択的に出力する距離情報選択手段として機能する。
なお、このレーザ距離計10Gにおける他の構成要素については、図17のブロック図に示したレーザ距離計10Fの同じ符号を付した構成要素と同じであるので、説明を省略する。
このレーザ距離計10Gでは、第1の距離情報Dp1又は第2の距離情報Dp2を選択的に出力するので、ユーザは、低反射材から高反射材まで連続的に反射光レベルのダイナミックレンジの広い距離計測を行い1チャンネルの距離情報を出力する距離計として取り扱うことができる。
また、出力情報選択部39は、図19に示すように、第1の距離情報Dp1又は第2の距離情報Dp2を選択的に出力するための閾値sh1、sh2をずらして切り替え特性にヒステリシスを持たせることにより、境界領域で反射光レベルの微小変動によるデータ選択の切り替え頻度が少なくなり、データを安定にすることができる。
なお、出力情報選択部39は、外部から設定した閾値に基づいて出力すべき第1の距離情報Dp1又は第2の距離情報Dp2を判定して選択することも可能になっている。
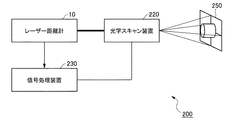
また、本発明に係るレーザ距離計10(10A〜10G)を使用して、例えば、図20に示すような光学的三次元形状測定機200を構成することができる。
この光学的三次元形状測定機200は、本発明に係るレーザ距離計10における測定光S2で対象物体250を走査する光学スキャン装置220と、レーザ距離計10の基準光検出器3と測定光検出器6の各検出出力に基づいて、対象物体250の複数の点までの絶対距離を計測して立体像を得る信号処理装置230を備える。
この光学的三次元形状測定機200では、レーザ距離計10からの測定光S2が光学スキャン装置220から対象物体250に向けて照射され、対象物体250からの反射光がレーザ距離計10に戻り、物体表面までの絶対距離が信号処理装置230により計測される。信号処理装置230は、光学スキャン装置220を制御してレーザービームを走査すると同時にレーザ距離計10が広いダイナミックレンジで計測する絶対距離情報を取得して、ビーム照射位置とその場所まで絶対距離を複数の点について蓄積することにより非接触で物体の三次元形状を測定する。
なお、光学スキャン装置220により光ビームを走査する代わりに対象物体250を移動させてもよい。