JP2020003531A - 可動装置、画像投影装置、ヘッドアップディスプレイ、レーザヘッドランプ、ヘッドマウントディスプレイ、物体認識装置、及び車両 - Google Patents
可動装置、画像投影装置、ヘッドアップディスプレイ、レーザヘッドランプ、ヘッドマウントディスプレイ、物体認識装置、及び車両 Download PDFInfo
- Publication number
- JP2020003531A JP2020003531A JP2018120205A JP2018120205A JP2020003531A JP 2020003531 A JP2020003531 A JP 2020003531A JP 2018120205 A JP2018120205 A JP 2018120205A JP 2018120205 A JP2018120205 A JP 2018120205A JP 2020003531 A JP2020003531 A JP 2020003531A
- Authority
- JP
- Japan
- Prior art keywords
- movable
- unit
- movable device
- light
- driving
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000005484 gravity Effects 0.000 claims description 6
- 238000005516 engineering process Methods 0.000 abstract description 5
- 230000003287 optical effect Effects 0.000 description 84
- 239000010410 layer Substances 0.000 description 46
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 40
- 229910052710 silicon Inorganic materials 0.000 description 40
- 239000010703 silicon Substances 0.000 description 40
- 238000010586 diagram Methods 0.000 description 21
- 230000005540 biological transmission Effects 0.000 description 15
- 210000000695 crystalline len Anatomy 0.000 description 14
- 238000000034 method Methods 0.000 description 11
- 239000010408 film Substances 0.000 description 10
- 238000012545 processing Methods 0.000 description 10
- 230000006870 function Effects 0.000 description 9
- 239000000463 material Substances 0.000 description 6
- 238000003860 storage Methods 0.000 description 6
- 238000001514 detection method Methods 0.000 description 5
- 239000000758 substrate Substances 0.000 description 5
- OAICVXFJPJFONN-UHFFFAOYSA-N Phosphorus Chemical compound [P] OAICVXFJPJFONN-UHFFFAOYSA-N 0.000 description 4
- 239000011229 interlayer Substances 0.000 description 4
- 239000000203 mixture Substances 0.000 description 4
- LIVNPJMFVYWSIS-UHFFFAOYSA-N silicon monoxide Chemical compound [Si-]#[O+] LIVNPJMFVYWSIS-UHFFFAOYSA-N 0.000 description 4
- VYPSYNLAJGMNEJ-UHFFFAOYSA-N Silicium dioxide Chemical compound O=[Si]=O VYPSYNLAJGMNEJ-UHFFFAOYSA-N 0.000 description 3
- 210000001508 eye Anatomy 0.000 description 3
- 239000010931 gold Substances 0.000 description 3
- 210000003128 head Anatomy 0.000 description 3
- 238000003384 imaging method Methods 0.000 description 3
- 238000004806 packaging method and process Methods 0.000 description 3
- BASFCYQUMIYNBI-UHFFFAOYSA-N platinum Chemical compound [Pt] BASFCYQUMIYNBI-UHFFFAOYSA-N 0.000 description 3
- 239000004065 semiconductor Substances 0.000 description 3
- IJGRMHOSHXDMSA-UHFFFAOYSA-N Atomic nitrogen Chemical compound N#N IJGRMHOSHXDMSA-UHFFFAOYSA-N 0.000 description 2
- 238000005452 bending Methods 0.000 description 2
- 210000005252 bulbus oculi Anatomy 0.000 description 2
- 239000003086 colorant Substances 0.000 description 2
- 238000011161 development Methods 0.000 description 2
- 238000006073 displacement reaction Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 238000002474 experimental method Methods 0.000 description 2
- PCHJSUWPFVWCPO-UHFFFAOYSA-N gold Chemical compound [Au] PCHJSUWPFVWCPO-UHFFFAOYSA-N 0.000 description 2
- 229910052737 gold Inorganic materials 0.000 description 2
- HFGPZNIAWCZYJU-UHFFFAOYSA-N lead zirconate titanate Chemical compound [O-2].[O-2].[O-2].[O-2].[O-2].[Ti+4].[Zr+4].[Pb+2] HFGPZNIAWCZYJU-UHFFFAOYSA-N 0.000 description 2
- 229910052451 lead zirconate titanate Inorganic materials 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 229910052751 metal Inorganic materials 0.000 description 2
- 239000002184 metal Substances 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 230000001151 other effect Effects 0.000 description 2
- 210000001525 retina Anatomy 0.000 description 2
- 238000004088 simulation Methods 0.000 description 2
- 229910004298 SiO 2 Inorganic materials 0.000 description 1
- BQCADISMDOOEFD-UHFFFAOYSA-N Silver Chemical compound [Ag] BQCADISMDOOEFD-UHFFFAOYSA-N 0.000 description 1
- 229910052782 aluminium Inorganic materials 0.000 description 1
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 239000011248 coating agent Substances 0.000 description 1
- 238000000576 coating method Methods 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 239000000470 constituent Substances 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 230000006866 deterioration Effects 0.000 description 1
- 238000009826 distribution Methods 0.000 description 1
- 230000007613 environmental effect Effects 0.000 description 1
- 210000000887 face Anatomy 0.000 description 1
- 230000004313 glare Effects 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 238000010438 heat treatment Methods 0.000 description 1
- 238000005286 illumination Methods 0.000 description 1
- 239000011261 inert gas Substances 0.000 description 1
- 229910010272 inorganic material Inorganic materials 0.000 description 1
- 239000011147 inorganic material Substances 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 239000012212 insulator Substances 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 238000005459 micromachining Methods 0.000 description 1
- 229910021421 monocrystalline silicon Inorganic materials 0.000 description 1
- 229910052757 nitrogen Inorganic materials 0.000 description 1
- 239000011368 organic material Substances 0.000 description 1
- 230000003647 oxidation Effects 0.000 description 1
- 238000007254 oxidation reaction Methods 0.000 description 1
- 229910052697 platinum Inorganic materials 0.000 description 1
- 230000002250 progressing effect Effects 0.000 description 1
- 230000003014 reinforcing effect Effects 0.000 description 1
- 239000011347 resin Substances 0.000 description 1
- 229920005989 resin Polymers 0.000 description 1
- 230000000630 rising effect Effects 0.000 description 1
- 235000012239 silicon dioxide Nutrition 0.000 description 1
- 239000000377 silicon dioxide Substances 0.000 description 1
- 229910052814 silicon oxide Inorganic materials 0.000 description 1
- 229910052709 silver Inorganic materials 0.000 description 1
- 239000004332 silver Substances 0.000 description 1
- 230000000087 stabilizing effect Effects 0.000 description 1
- 239000010409 thin film Substances 0.000 description 1
Images















Classifications
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/01—Head-up displays
- G02B27/017—Head mounted
- G02B27/0172—Head mounted characterised by optical features
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B26/00—Optical devices or arrangements for the control of light using movable or deformable optical elements
- G02B26/08—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light
- G02B26/0816—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light by means of one or more reflecting elements
- G02B26/0833—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light by means of one or more reflecting elements the reflecting element being a micromechanical device, e.g. a MEMS mirror, DMD
- G02B26/0858—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light by means of one or more reflecting elements the reflecting element being a micromechanical device, e.g. a MEMS mirror, DMD the reflecting means being moved or deformed by piezoelectric means
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B26/00—Optical devices or arrangements for the control of light using movable or deformable optical elements
- G02B26/08—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light
- G02B26/10—Scanning systems
- G02B26/101—Scanning systems with both horizontal and vertical deflecting means, e.g. raster or XY scanners
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B26/00—Optical devices or arrangements for the control of light using movable or deformable optical elements
- G02B26/08—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light
- G02B26/10—Scanning systems
- G02B26/105—Scanning systems with one or more pivoting mirrors or galvano-mirrors
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/01—Head-up displays
- G02B27/0101—Head-up displays characterised by optical features
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/09—Beam shaping, e.g. changing the cross-sectional area, not otherwise provided for
- G02B27/0938—Using specific optical elements
- G02B27/0977—Reflective elements
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/20—Scenes; Scene-specific elements in augmented reality scenes
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/58—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/01—Head-up displays
- G02B27/017—Head mounted
- G02B2027/0178—Eyeglass type
Abstract
Description
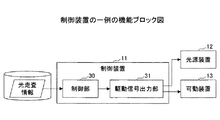
まず、本実施形態の可動装置を適用した光走査システムについて、図1〜図4に基づいて詳細に説明する。
なお、本実施形態の可動装置の詳細および制御装置による制御の詳細については後述する。
次に、本実施形態の可動装置を適用した画像投影装置について、図5および図6を用いて詳細に説明する。
次に、本実施形態の可動装置13を適用した光書込装置について図7および図8を用いて詳細に説明する。
次に、上記本実施形態の可動装置を適用した物体認識装置について、図9および図10を用いて詳細に説明する。
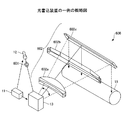
次に、上記本実施形態の可動装置を自動車のヘッドライトに適用したレーザヘッドランプ50について、図11 を用いて説明する。図11は、レーザヘッドランプ50の構成の一例を説明する概略図である。
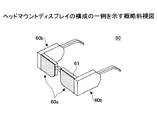
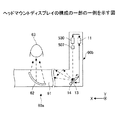
次に、上記本実施形態の可動装置を適用したヘッドマウントディスプレイ60について、図12〜13を用いて説明する。ここでヘッドマウントディスプレイ60は、人間の頭部に装着可能な頭部装着型ディスプレイで、例えば、眼鏡に類する形状とすることができる。ヘッドマウントディスプレイを、以降ではHMDと省略して示す。
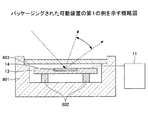
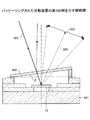
次に、本実施形態の可動装置のパッケージングについて図14を用いて説明する。
図17は、第1の実施形態の可動装置の構成の一例を示す平面図である。可動装置13は、第1軸、及び第2軸回りに回動可能な両持ちタイプの可動装置である。
次に、第2の実施形態の可動装置を、図20を参照して説明する。なお、第2の実施形態において、既に説明した実施形態と同一構成部分についての説明は省略する場合がある。
次に、第3の実施形態の可動装置を、図21を参照して説明する。なお、第3の実施形態において、既に説明した実施形態と同一構成部分についての説明は省略する場合がある。
11、41 制御装置
12、12b 光源装置
13、13a、13b 可動装置
14 反射面
15 被走査面
25 光源装置ドライバ
26 可動装置ドライバ
30、42 制御部
31、43 駆動信号出力部
44 検出信号取得部
45 弾性率調整用駆動信号出力部
50 レーザヘッドランプ
51 ミラー
52 透明板
60 ヘッドマウントディスプレイ
60a フロント
60b テンプル
61 導光板
62 ハーフミラー
63 装着者
110 可動部
112 反射部
113、160 第2支持部
114a、114b 接続部
115a、115b トーションバー
116a、116b 第2駆動部
117a、117b、118a、118b、119a、119b 調整部
120a、120b 第1駆動部
130 第1支持部
140 電極端子
150A、150B 圧電駆動部群
200 シリコン活性層
201 層間膜
202 シリコン支持層
301 下部電極
302 圧電部
303 上部電極
400 自動車(車両の一例)
500 ヘッドアップディスプレイ装置(画像投影装置の一例、ヘッドアップディスプレイの一例)
650 レーザプリンタ
700 ライダ装置(物体認識装置の一例)
702 被対象物
801、811、821 パッケージ部材
802 取付部材
803、812、822 透過部材
Claims (13)
- 反射部を有する可動部と、
前記可動部に接続し、前記可動部を駆動させる第1駆動部と、
前記第1駆動部に接続し、前記第1駆動部を支持する第1支持部と、を有する可動装置であって、
前記可動部は、前記反射部を挟んで対称に配置された調整部を含む可動装置。 - 前記調整部は、幅、長さ、及び厚みの少なくとも1つが所定の寸法で形成された部材である請求項1に記載の可動装置。
- 前記可動部は、
前記第1駆動部に接続する第2支持部と、
第2支持部に支持され、前記反射部に接続し、前記反射部を駆動させる第2駆動部と、を有する請求項1、又は2に記載の可動装置。 - 前記調整部は、前記第2支持部に形成されている請求項3に記載の可動装置。
- 前記第2駆動部は、前記反射部を共振駆動させる請求項3、又は4に記載の可動装置。
- 前記第1駆動部は、前記可動部を第1軸回りに回動させ、
前記第2駆動部は、前記反射部を第2軸回りに回動させ、
前記可動部の重心は、前記第1軸、及び前記第2軸の少なくとも1つの上に位置する請求項3乃至5の何れか1項に記載の可動装置。 - 前記第1駆動部は、2以上の折り返し部と、2以上の接続部とを備えるミアンダ構造を含む請求項1乃至6の何れか1項に記載の可動装置。
- 請求項1乃至7の何れか1項に記載の可動装置を備える画像投影装置。
- 請求項1乃至7の何れか1項に記載の可動装置を備えるヘッドアップディスプレイ。
- 請求項1乃至7の何れか1項に記載の可動装置を備えるレーザヘッドランプ。
- 請求項1乃至7の何れか1項に記載の可動装置を備えるヘッドマウントディスプレイ。
- 請求項1乃至7の何れか1項に記載の可動装置を備える物体認識装置。
- 請求項9に記載のヘッドアップディスプレイ、請求項10に記載のレーザヘッドランプ、及び請求項12に記載の物体認識装置の少なくとも1つを有する車両。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018120205A JP7167500B2 (ja) | 2018-06-25 | 2018-06-25 | 可動装置、画像投影装置、ヘッドアップディスプレイ、レーザヘッドランプ、ヘッドマウントディスプレイ、物体認識装置、及び車両 |
| US16/441,641 US10901220B2 (en) | 2018-06-25 | 2019-06-14 | Movable device, image projection apparatus, heads-up display, laser headlamp, head-mounted display, object recognition device, and vehicle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018120205A JP7167500B2 (ja) | 2018-06-25 | 2018-06-25 | 可動装置、画像投影装置、ヘッドアップディスプレイ、レーザヘッドランプ、ヘッドマウントディスプレイ、物体認識装置、及び車両 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020003531A true JP2020003531A (ja) | 2020-01-09 |
| JP7167500B2 JP7167500B2 (ja) | 2022-11-09 |
Family
ID=68981676
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018120205A Active JP7167500B2 (ja) | 2018-06-25 | 2018-06-25 | 可動装置、画像投影装置、ヘッドアップディスプレイ、レーザヘッドランプ、ヘッドマウントディスプレイ、物体認識装置、及び車両 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US10901220B2 (ja) |
| JP (1) | JP7167500B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7456294B2 (ja) | 2020-06-01 | 2024-03-27 | 株式会社リコー | 可動装置、偏向装置、距離測定装置、画像投影装置、及び車両 |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6726674B2 (ja) * | 2015-10-15 | 2020-07-22 | マクセル株式会社 | 情報表示装置 |
| JP7363177B2 (ja) | 2019-08-07 | 2023-10-18 | 株式会社リコー | 光偏向器、光走査システム、画像投影装置、画像形成装置、レーザレーダ |
| US11750779B2 (en) | 2019-08-20 | 2023-09-05 | Ricoh Company, Ltd. | Light deflector, optical scanning system, image projection device, image forming apparatus, and lidar device |
| US11789258B2 (en) | 2019-11-27 | 2023-10-17 | Ricoh Company, Ltd. | Light deflector, deflecting device, object recognition device, image projection device, and mobile object |
| US11796793B2 (en) | 2019-11-27 | 2023-10-24 | Ricoh Company, Ltd. | Optical deflector, deflection apparatus, distance measuring apparatus, image projecting apparatus, and movable body |
| JP7459580B2 (ja) * | 2020-03-16 | 2024-04-02 | 株式会社リコー | 可動装置、画像投影装置、ヘッドアップディスプレイ、レーザヘッドランプ、ヘッドマウントディスプレイ、物体認識装置、及び移動体 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20040183149A1 (en) * | 2001-07-26 | 2004-09-23 | Harald Schenk | Micromechanical device |
| JP2011095290A (ja) * | 2009-10-27 | 2011-05-12 | Seiko Epson Corp | 光偏向素子、光偏向器、及び画像形成装置 |
| JP2013020124A (ja) * | 2011-07-12 | 2013-01-31 | Ricoh Co Ltd | 光偏向装置、光走査装置、画像形成装置及び画像投影装置 |
| JP2015087443A (ja) * | 2013-10-29 | 2015-05-07 | セイコーエプソン株式会社 | 光スキャナー、画像表示装置、ヘッドマウントディスプレイおよびヘッドアップディスプレイ |
| JP2016009050A (ja) * | 2014-06-24 | 2016-01-18 | スタンレー電気株式会社 | 光偏向器 |
| JP2016081037A (ja) * | 2014-10-15 | 2016-05-16 | 株式会社リコー | 光偏向器、2次元画像表示装置、光走査装置及び画像形成装置 |
| JP2017068205A (ja) * | 2015-10-02 | 2017-04-06 | ミツミ電機株式会社 | 光走査モジュール、光走査制御装置 |
Family Cites Families (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6177667B1 (en) | 1997-10-03 | 2001-01-23 | Ricoh Company, Ltd. | Imaging device |
| JP4520402B2 (ja) | 2005-12-07 | 2010-08-04 | 株式会社リコー | 複数波長光スイッチング素子・複数波長光スイッチングデバイス・カラー光スイッチング素子・カラー光スイッチングデバイス・複数波長光スイッチング素子アレイ・カラー光スイッチング素子アレイ・複数色画像表示装置およびカラー画像表示装置 |
| JP5195112B2 (ja) | 2008-07-18 | 2013-05-08 | 株式会社リコー | 屈折率センサ、屈折率センサアレイおよびバイオセンサ |
| JP5315845B2 (ja) | 2008-08-07 | 2013-10-16 | 株式会社リコー | 照明装置及び投影型画像表示装置 |
| JP5493735B2 (ja) | 2009-01-30 | 2014-05-14 | 株式会社リコー | 偏向ミラー、光走査装置、画像形成装置、および画像投影装置 |
| JP5728823B2 (ja) | 2009-06-09 | 2015-06-03 | 株式会社リコー | 光偏向器、光走査装置、画像形成装置及び画像投影装置 |
| US8654424B2 (en) | 2009-09-15 | 2014-02-18 | Ricoh Company, Ltd. | Multibeam deflector for separating beams output from optical deflection devices |
| JP5742141B2 (ja) | 2009-09-18 | 2015-07-01 | 株式会社リコー | 光走査装置 |
| US9927611B2 (en) * | 2010-03-29 | 2018-03-27 | Soraa Laser Diode, Inc. | Wearable laser based display method and system |
| JP5842467B2 (ja) | 2010-11-16 | 2016-01-13 | 株式会社リコー | アクチュエータ装置、このアクチュエータ装置用の保護カバー、このアクチュエータの製造方法、このアクチュエータ装置を用いた光偏向装置、二次元光走査装置及びこれを用いた画像投影装置 |
| JP6201528B2 (ja) | 2012-11-15 | 2017-09-27 | 株式会社リコー | 光偏向装置、画像形成装置、ヘッドアップディスプレイ及び車両 |
| JP6168353B2 (ja) * | 2013-09-13 | 2017-07-26 | 株式会社リコー | 光偏向装置、画像形成装置、車両、光偏向装置の制御方法、及び光偏向装置の調整方法 |
| US10232502B2 (en) * | 2014-03-17 | 2019-03-19 | Husqvarna Ab | Power equipment cooling system |
| US9766450B2 (en) * | 2014-10-15 | 2017-09-19 | Ricoh Company, Ltd. | Light deflector, two-dimensional image display apparatus, optical scanner, and image forming apparatus |
| JP6459422B2 (ja) | 2014-11-17 | 2019-01-30 | 株式会社リコー | 光偏向器、光走査装置、画像形成装置、画像投影装置、ヘッドアップディスプレイ及びレーザレーダ |
| JP6216307B2 (ja) * | 2014-11-17 | 2017-10-18 | 矢崎総業株式会社 | ヘッドアップディスプレイ装置及びバックライト装置 |
| JP6485013B2 (ja) | 2014-11-27 | 2019-03-20 | 株式会社リコー | 光偏向器、画像表示装置及び物体装置 |
| WO2016093066A1 (ja) | 2014-12-08 | 2016-06-16 | 株式会社リコー | 光偏向器、画像表示装置及び物体装置 |
| US20180084232A1 (en) * | 2015-07-13 | 2018-03-22 | Michael Belenkii | Optical See-Through Head Worn Display |
| US9910271B2 (en) * | 2015-12-21 | 2018-03-06 | Ricoh Company, Ltd. | Actuator device, optical deflector, an image projection apparatus, and image forming apparatus |
| JP6662392B2 (ja) | 2015-12-22 | 2020-03-11 | 株式会社リコー | 回動装置、光走査装置及び画像表示装置 |
| US10404954B2 (en) * | 2016-01-21 | 2019-09-03 | Ricoh Company, Ltd. | Optical deflection apparatus, image projector, optical writing unit, and object recognition device |
| EP3220183B1 (en) | 2016-03-17 | 2021-11-10 | Ricoh Company, Ltd. | Control unit, optical deflection system, image projection apparatus, and control method |
| US10663974B2 (en) * | 2016-11-23 | 2020-05-26 | Electronics And Telecommunications Research Institute | Object recognition device, autonomous driving system including the same, and object recognition method using the object recognition device |
| JP6839806B2 (ja) * | 2017-09-21 | 2021-03-10 | パナソニックIpマネジメント株式会社 | ヘッドアップディスプレイ装置、及び車両 |
-
2018
- 2018-06-25 JP JP2018120205A patent/JP7167500B2/ja active Active
-
2019
- 2019-06-14 US US16/441,641 patent/US10901220B2/en active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20040183149A1 (en) * | 2001-07-26 | 2004-09-23 | Harald Schenk | Micromechanical device |
| JP2011095290A (ja) * | 2009-10-27 | 2011-05-12 | Seiko Epson Corp | 光偏向素子、光偏向器、及び画像形成装置 |
| JP2013020124A (ja) * | 2011-07-12 | 2013-01-31 | Ricoh Co Ltd | 光偏向装置、光走査装置、画像形成装置及び画像投影装置 |
| JP2015087443A (ja) * | 2013-10-29 | 2015-05-07 | セイコーエプソン株式会社 | 光スキャナー、画像表示装置、ヘッドマウントディスプレイおよびヘッドアップディスプレイ |
| JP2016009050A (ja) * | 2014-06-24 | 2016-01-18 | スタンレー電気株式会社 | 光偏向器 |
| JP2016081037A (ja) * | 2014-10-15 | 2016-05-16 | 株式会社リコー | 光偏向器、2次元画像表示装置、光走査装置及び画像形成装置 |
| JP2017068205A (ja) * | 2015-10-02 | 2017-04-06 | ミツミ電機株式会社 | 光走査モジュール、光走査制御装置 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7456294B2 (ja) | 2020-06-01 | 2024-03-27 | 株式会社リコー | 可動装置、偏向装置、距離測定装置、画像投影装置、及び車両 |
Also Published As
| Publication number | Publication date |
|---|---|
| US10901220B2 (en) | 2021-01-26 |
| US20190391394A1 (en) | 2019-12-26 |
| JP7167500B2 (ja) | 2022-11-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7167500B2 (ja) | 可動装置、画像投影装置、ヘッドアップディスプレイ、レーザヘッドランプ、ヘッドマウントディスプレイ、物体認識装置、及び車両 | |
| US11644664B2 (en) | Light deflector, optical scanning system, image projection device, image forming apparatus, and lidar device | |
| JP2023174680A (ja) | 可動装置、画像投影装置、ヘッドアップディスプレイ、レーザヘッドランプ、ヘッドマウントディスプレイ、物体認識装置、及び車両 | |
| US20220299757A1 (en) | Movable device, image projection apparatus, laser headlamp, head-mounted display, distance measurement device, and mobile object | |
| JP2020101588A (ja) | 可動装置、距離測定装置、画像投影装置、車両、及び台座 | |
| JP7338403B2 (ja) | 光偏向器、画像投影装置、ヘッドアップディスプレイ、レーザヘッドランプ、ヘッドマウントディスプレイ、物体認識装置、及び車両 | |
| US11947113B2 (en) | Movable device, image projection apparatus, head-up display, laser headlamp, head-mounted display, object recognition device, and vehicle | |
| JP7363352B2 (ja) | 可動装置、画像投影装置、ヘッドアップディスプレイ、レーザヘッドランプ、ヘッドマウントディスプレイ、物体認識装置、及び車両 | |
| JP7247553B2 (ja) | 可動装置、画像投影装置、ヘッドアップディスプレイ、レーザヘッドランプ、ヘッドマウントディスプレイ、物体認識装置、及び車両 | |
| JP2020154053A (ja) | 光偏向素子及びその製造方法、光偏向システム、光走査システム | |
| US11640053B2 (en) | Movable device, image projection apparatus, heads-up display, laser headlamp, head-mounted display, object recognition device, and mobile object | |
| JP7451930B2 (ja) | 光偏向器、偏向装置、距離測定装置、画像投影装置、及び車両 | |
| US11624903B2 (en) | Light deflector, LiDAR device, and image forming apparatus | |
| JP7396147B2 (ja) | 可動装置、光偏向装置、画像投影装置、光書込装置、物体認識装置、移動体、ヘッドマウントディスプレイ | |
| US20220155582A1 (en) | Operating device, light deflector, light deflecting device, distance measurement apparatus, image projection apparatus, and mobile object | |
| US20220299755A1 (en) | Light deflector, image projection apparatus, laser headlamp, head-mounted display, distance measurement apparatus, and mobile object | |
| US20220326512A1 (en) | Movable apparatus | |
| US11662436B2 (en) | Mount, movable device, LiDAR device, image forming apparatus, and image projection apparatus | |
| US20230324677A1 (en) | Movable device, projection apparatus, and head-up display | |
| JP6809281B2 (ja) | 光偏向器及び光走査装置及び画像投影装置及び物体認識装置 | |
| US20210395073A1 (en) | Movable device, distance measurement device, image projection apparatus, vehicle, and mount | |
| JP2023140219A (ja) | 可動装置、光偏光素子、画像投影装置、ヘッドアップディスプレイ、レーザヘッドランプ、ヘッドマウントディスプレイ、物体認識装置、および移動体 | |
| JP2020101587A (ja) | 可動装置、距離測定装置、画像投影装置、及び車両 | |
| JP2021085983A (ja) | 光偏向器、偏向装置、距離測定装置、画像投影装置、及び車両 | |
| JP2021189323A (ja) | 可動装置、偏向装置、距離測定装置、画像投影装置、及び車両 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210208 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20211119 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20211130 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220128 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20220510 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220805 |
|
| C60 | Trial request (containing other claim documents, opposition documents) |
Free format text: JAPANESE INTERMEDIATE CODE: C60 Effective date: 20220805 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20220902 |
|
| C21 | Notice of transfer of a case for reconsideration by examiners before appeal proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C21 Effective date: 20220906 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220927 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20221010 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 7167500 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |