JP2019139965A - 気流搬送装置 - Google Patents
気流搬送装置 Download PDFInfo
- Publication number
- JP2019139965A JP2019139965A JP2018022210A JP2018022210A JP2019139965A JP 2019139965 A JP2019139965 A JP 2019139965A JP 2018022210 A JP2018022210 A JP 2018022210A JP 2018022210 A JP2018022210 A JP 2018022210A JP 2019139965 A JP2019139965 A JP 2019139965A
- Authority
- JP
- Japan
- Prior art keywords
- vortex ring
- air
- blowing
- sending
- wind
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images











Landscapes
- Disinfection, Sterilisation Or Deodorisation Of Air (AREA)
Abstract
【課題】空気渦輪を目標とする位置に的確に到達させること。【解決手段】イオン風発生器3は、放電電極20、基準電極30、噴射口12a、放電電極20と基準電極30との間に出力電圧を印加するための電源回路40とを備えている。制御装置50は、電源回路40を制御して、放電電極20と基準電極30との間に時間T0にわたってコロナ放電を生じさせ、噴射口12aから連続的な気流を送風させる。その送風の停止後に、出力電圧をパルス状に印加させることで噴射口12aから空気コアを吐出させ、もって渦輪Rを形成させる。連続的な気流の送風によって生じた整然とした空気の流れは、送風が停止した後も継続する。その状態下で送出された渦輪Rは進路が乱されることがなく、目標位置に到達する。【選択図】図5A
Description
本発明は、送風装置に関するものである。
従来、装置内に取り込んだ空気を渦輪として送出する装置が知られており、この渦輪を送出するための吹出し口の開口方向を変化させて渦輪の送出方向を調節するものがある(例えば、特許文献1参照)。
しかし、特許文献1に記載の流体搬送装置の場合、渦輪の送出方向を調節するだけであるので、送出された渦輪が熱対流や人や物の動きに伴う気流などの外乱気流の影響を受けて進路を変化させる結果、渦輪の到達位置が所期の場所からずれてしまうという問題があった。
本発明は上記点に鑑み、渦輪の進路が外乱気流によって乱される可能性を低減することを目的とする。
上記目的を達成するための請求項1に記載の発明は、空気の渦輪を送出する渦輪送出部(3)と、送風部(3、5)によって送風が行われ、その後、前記送風部による送風の風量の低減または風向の変更が行われた後に、前記低減または前記変更によって風速が低下した領域を前記渦輪が進むよう、前記渦輪送出部による前記渦輪の送出タイミングを制御する制御部(50)と、を備えた気流搬送装置である。
このようになっていることで、渦輪の進路を乱すような外乱気流があったとしても、渦輪が送出される前に送風部の送風によって、外乱気流が抑制される。これにより、送風部によって送風が終わった後には、気流が整った状態になっている。したがって、送風部によって送風が終わった後に渦輪が送出されることで、渦輪の進路が外乱気流に乱される可能性が低減する。
また、請求項5に記載の発明は、空気の渦輪を送出する渦輪送出部(3)と、送風部(3、5)によって送風が行われているときに、前記送風部の送風によって流れる風に前記渦輪が当たって前記渦輪の進路が曲がるよう、前記渦輪送出部による前記渦輪の送出を制御する制御部(50)と、を備えた気流搬送装置である。
このようになっていることで、渦輪の進路を乱すような外乱気流があったとしても、送風部によって流れる風に渦輪を当てて渦輪の進路を曲げることで、渦輪の進路が外乱気流に乱される可能性が低減する。これは、送風部によって流れる風が外乱気流よりも安定しているからである。
なお、本欄および特許請求の範囲における括弧内の符号は、特許請求の範囲に記載された用語と後述の実施形態に記載される当該用語を例示する具体物等との対応関係を示すものである。
以下、本発明の一実施形態について説明する。なお、以下の各実施形態相互において、互いに同一もしくは均等である部分には、図中、同一符号を付してある。
(第1実施形態)
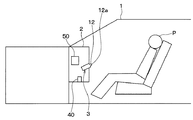
本発明の第1実施形態に係る気流搬送装置は、図1に示すように、イオン風発生器3、電源回路40および制御装置50等で構成される。イオン風発生器3は、車両1のダッシュボード2の前面部に取り付けられ、その噴射ノズル12の噴射口12aを車室内に向けている。噴射口12aは、基準電極30を挟んで放電電極20とは反対側に配置される。
本発明の第1実施形態に係る気流搬送装置は、図1に示すように、イオン風発生器3、電源回路40および制御装置50等で構成される。イオン風発生器3は、車両1のダッシュボード2の前面部に取り付けられ、その噴射ノズル12の噴射口12aを車室内に向けている。噴射口12aは、基準電極30を挟んで放電電極20とは反対側に配置される。
イオン風発生器3は、車両1の乗員Pに向けて空気渦輪または連続した気流を送風することができる。また、ダッシュボード2の内部には、電源回路40および制御装置50が配置されている。
イオン風発生器3の構成は図2に示す通りである。イオン風発生器3は、ケース10、放電電極20、基準電極30、電源回路40、制御装置50および芳香発生器60を備えている。なお、図2におけるケース10の部分は、ケース10の内部を透視した状態が示されている。
ケース10は、基準電極30および放電電極20を収容するものであり、中空円筒状の胴体部11と、後述するコロナ放電により発生したイオンによるイオン風を噴射させる筒状の噴射ノズル12と、支持部13とを有している。本実施形態におけるケース10は、ダッシュボード2の固定されることで、姿勢が変化しないようになっている。したがって、本実施形態においては、渦輪の送出方向は固定である。
胴体部11、噴射ノズル12および支持部13は、絶縁性部材により構成されている。胴体部11における長手方向の一端側には、ケース10の外部の空気を当該ケース10内に取り込む開口部13aが形成されている。この開口部13aには支持部13が形成されている。胴体部11における長手方向の他端側には円筒状の噴射ノズル12が形成されている。また、胴体部11における放電電極20と噴射ノズル12の間には、導電金属製の基準電極30が設置されている。
さらに、芳香発生器60が、基準電極30と噴射ノズル12との間に位置して胴体部11の内面に取り付けられている。芳香発生器60は、超音波振動を利用して芳香成分を含んだエアロゾルを噴出するものであり、その噴出方向は胴体部11の中心部を向いている。
放電電極20は、針状の先端部20aを有する放電電極である。放電電極20は、導電金属製(例えば、銅)の部材により構成されている。放電電極20は、先端部20aがケース10の内面側に位置するよう支持部13により支持されている。放電電極20とケース10の間には絶縁部材(図示せず)が設けられており、放電電極20とケース10は絶縁されている。
基準電極30は、中空円筒形状をなす基準電極である。基準電極30は、基準電極30の外周面がケース10の内周面と接触するようケース10内に配置されている。
電源回路40は、放電電極20と基準電極30の電位差を制御する出力電圧を発生させる。電源回路40は、正極端子+および負極端子−を有している。電源回路40の負極端子−は配線40aを介して放電電極20に接続されている。また、電源回路40の正極端子+は配線40bを介して放電電極20および接地端子GNDに接続されている。電源回路40は、3kV以上の出力電圧を出力することが可能となっている。また、電源回路40は、矩形形状の電圧を出力することが可能となっている。
制御装置50は、CPU、RAM、ROM、I/O等を有するコンピュータとして構成され、CPUがROMに記憶されたプログラムにしたがって各種処理を実施することで、制御装置50の各種作動が実現する。制御装置50が制御部に対応する。
本実施形態の制御装置50は、電源回路40の出力電圧を、放電電極20と基準電極30の間にコロナ放電を誘起させない第1電圧(本実施形態では、−2キロボルト)と、放電電極20と基準電極30の間にコロナ放電を誘起させる第2電圧(本実施形態では、−3キロボルト)との間で切り替える。これにより、コロナ放電により発生したイオン風が噴射ノズル12から噴流として噴射される。
また、制御装置50は、芳香発生器60の稼働を制御する。芳香発生器60を稼働させれば上述のエアロゾルが芳香発生器60から胴体部11内に噴出するので、噴射ノズル12から噴射されるイオン風に芳香成分を添加できる。
次に、イオン風発生器3の作動について図3、図4を参照して説明する。まず、図3に示すように、制御装置50は、プレ送風処理(ステップS110)を行う。図4に示すように、電源回路40からは予め−2kVの電圧が出力されて、放電電極20の電位は−2kVとされている。一方、基準電極30の電位は、これが接地端子GNDに接続されていることから、0Vとなっている。よって、放電電極20と基準電極30との間には2kVの電圧が印加されている。電源回路40の出力電圧が−2kVであると放電電極20の周囲にコロナ放電は発生しない。
ステップS110では、制御装置50は電源回路40を制御して、その出力電圧を−3kVに変化させ、この出力電圧をプレ送風時間T0にわたって維持させる。このプレ送風時間T0は、後述するパルス状の出力電圧の印加時間T2よりも十分に長い。
放電電極20と基準電極30の間に−3kVの電圧が印加されると、放電電極20の先端部20aの近傍に強電界が生じ、放電電極20の周囲にコロナ放電が誘起され、放電電極20と基準電極30の間にコロナ放電が発生する。
このコロナ放電の発生により放電電極20の周囲の空気が電離して空気イオンが発生する。具体的には、放電電極20の周囲の空気が電離して正イオンと負イオンが生成される。
そして、負のイオンが電極間の電界によって加速され基準電極30側に移動する。また、負のイオンが基準電極30側に移動する過程で放電電極20および基準電極30の周囲の空気を巻き込みイオン風が発生し、このイオン風はケース10に形成された噴射ノズル12の噴射口12aから噴射される。
なお、ケース10内の負のイオンの一部は接地端子GNDを介して電荷を放出し、ケース10内の負のイオンの一部はケース10内にイオンの状態で留まり、ケース10内の負のイオンの残りの一部は周囲の空気とともに噴射ノズル12からケース10外に噴射される。
こうしたイオン風の吹き出しは、−3kVの出力電圧が印加されるプレ送風時間T0にわたって継続するので、噴射ノズル12から吐出されるイオン風は連続した気流となる。なおこのとき、噴射ノズル12から吐出されるイオン風は渦輪を1個形成していてもよいし形成していなくてもよい。
制御装置50は、−3kVの出力電圧の印加時間がプレ送風時間T0を経過すると、電源回路40の出力電圧が−2kVになるよう電源回路40を制御する。これにより、放電電極20と基準電極30の間に−2kVの電圧が印加される。すると、放電電極20の近傍の電界は小さくなり、コロナ放電は終息し、イオン風も発生しなくなる。この−2kVの出力電圧が印加されるインターバル時間T1は、図4に示すように、プレ送風時間T0よりも短い。
図3に示すように、制御装置50は、プレ送風(ステップS110)を終えると、芳香発生処理(ステップS120)を行う。すなわち、芳香発生器60を制御して稼働させる。すると、芳香発生器60から胴体部11内に芳香成分を含んだエアロゾルが噴出される。
図4に示すように、芳香発生器60の稼働は、上記のインターバル時間T1内で開始して終了する。そのため、芳香成分を含んだエアロゾルは基準電極30と噴射ノズル12とに挟まれる空間内に滞留する。
インターバル時間T1が経過すると、制御装置50は、渦輪生成処理(ステップS130)を実行する。
この渦輪生成処理では、制御装置50は、電源回路40を制御して、その出力電圧をパルス印加時間T2だけ、−3kVに変化させる。そのため、プレ送風処理(ステップS110)の実行時と同様に、放電電極20と基準電極30の間にコロナ放電が発生し、放電電極20の周囲の空気が電離して正イオンと負イオンが生成され、負のイオンの移動に伴ってイオン風が発生し、イオン風が噴射口12aから噴射される。この際に、胴体部11内に滞留していた芳香成分のエアロゾルがイオン風に随伴して噴射される。
なお、ここで−3kVの出力電圧を印加するパルス印加時間T2は、コロナ放電によって生成されて噴射口12aから吹き出されるイオン風が渦輪を形成し得る短い時間内だけとされる。具体的なパルス印加時間T2は、ケース10の形状や寸法、噴射口12aの開口寸法、放電電極20と基準電極30の距離、印加される出力電圧などの構造的な条件や電気的な条件によって定まるので一律ではないが、本実施形態では、0.2秒間である。
また、図4に示すように、パルス印加時間T2はインターバル時間T1よりも短い。インターバル時間T1が短過ぎたり、インターバル時間T1が無かったりすると、パルス印加時間T2に生成された渦輪がプレ送風時間T0に生成された連続風に追い付いて当たることで、当該渦輪が崩壊してしまう可能性がある。渦輪の進行速度は、渦輪を形成しない連続風の進行速度よりも高くなる場合があるからである。したがって、インターバル時間T1を設定してT2<T1とすることで、渦輪崩壊の可能性を低減することができる。
また、プレ送風時間T0はパルス印加時間T2よりも十分に長い(時間T0>時間T1>時間T2である)。このようにすることで、外乱を整えるために十分な運動量を連続風に与えることができる。
渦輪生成処理(ステップS130)により−3kVの出力電圧を印加するパルス印加時間T2が上述のように短時間であることから、図2に示すように、噴射口12aから吹き出されるイオン風は、芳香成分を含んだ円筒状の空気噴流のコアCとなる。
空気噴流のコアCと周囲の止まっている空気との間で粘性摩擦が働いて周りの空気を回転させようとする力の作用によって渦ができる。この渦はコアCのまわりに輪のようにつながっていて渦輪Rと呼ばれる。このようにしてできた渦輪Rは、コアCが減衰した後でも自らの回転のはたらきにより前に進むことができ、比較的長距離でも移動することが可能である。
渦輪Rには芳香成分が含まれているので、この渦輪Rの到達先が乗員Pの顔付近になるように噴射ノズル12の方向を定めておけば、渦輪Rによって搬送された芳香成分が乗員Pの顔付近に到達する。したがって、芳香成分により乗員Pを快適にできる。なお、渦輪Rの到達先の設定は乗員Pの顔付近であってもよいし、顔付近以外であってもよい。渦輪Rが送出されてから到達先に到達するまでの間に、渦輪Rは、プレ送風の停止によって風速が低下した領域を進む。
本実施形態によれば、制御装置50がプレ送風処理(ステップS110)を実行することによって、イオン風発生器3の噴射口12aから連続的な気流を送風し、その後に制御装置50が渦輪生成処理(ステップS130)を実行することによって、渦輪Rが噴射口12aから吹き出される。
一般に、車室内の空気の挙動は熱対流や人や物の動きに伴う気流などもあって整然としたものにはなっていない。すなわち、図5Aに例示するように、噴射口12aと乗員Pとの間には渦輪Rの進路を乱すような外乱気流A1が存在する。
しかし、本実施形態によれば、プレ送風処理(ステップS110)による連続的な気流の送風が実行されると、その送風によって安定した気流Bが生じる。すると周囲の空気が気流Bに引き込まれるように流れる。その結果、外乱気流が抑えられ、気流が整えられる。
このように整えられた空気の流れA2は、プレ送風処理(ステップS110)が終了して連続的な気流の送風が停止した後も、ある程度の期間は継続する(図5B参照)。その状態下で渦輪生成処理(ステップS130)が実行されて、渦輪Rが噴射口12aから吹き出されるので、送出された渦輪Rの進路が乱される可能性が低減する。したがって、渦輪Rを目標位置(例えば乗員Pの顔付近)に到達させることができる。
特に、同一のイオン風発生器3の噴射口12aからまず連続的な気流Bを送風し、その後に渦輪Rを噴射した場合、連続的な気流Bの送風(すなわちプレ送風)の停止後に残留した気流A2に空気渦輪を乗せることができる。つまり、プレ送風によって風が通った領域を、渦輪Rが通る。なお、気流A2の風速は、プレ送風時における同じ位置の風速よりも低い。
プレ送風による整流効果は、プレ送風によって風が通った領域以外にも及ぶが、当該領域内の方がより顕著である。したがって、本実施形態のように、プレ送風によって風が通った領域を渦輪Rが通る場合は、渦輪Rの進路が外乱気流に乱される可能性がより低減する。
しかも、連続的な気流Bの送風の停止後に残留した気流A2の流れ方向が渦輪Rの目標方向と一致するから、渦輪Rを確実に目標位置に到達させることができる。
また、本実施形態によれば、イオン風発生器3は、ステップS110における制御によってプレ送風を行う際に連続気流送風部として機能し、ステップS130における制御によって渦輪を発生させることで渦輪送出部として機能する。したがって、イオン風発生器3単体で連続気流送風部としても渦輪送出部としても機能するので、装置構成が簡易になる。
以上説明した通り、制御装置50は、プレ送風が停止した後に、その停止によって風速が低下した領域を渦輪が進むよう、イオン風発生器3による渦輪の送出タイミングを制御する。このようになっていることで、渦輪の進路を乱すような外乱気流があったとしても、渦輪が送出される前にプレ送風によって、外乱気流が抑制される。これにより、プレ送風が終わった後には、気流が整った状態になっている。したがって、プレ送風が終わった後に渦輪が送出されることで、渦輪の進路が外乱気流に乱される可能性が低減する。
(第2実施形態)
本実施形態では車両の空調装置が連続気流送風部として使用されると共に、イオン風発生器3が渦輪を送出する方向が可変となっている。なお、第1実施形態と同一もしくは均等である部分には、図中、同一符号を付して、説明を省略する。
本実施形態では車両の空調装置が連続気流送風部として使用されると共に、イオン風発生器3が渦輪を送出する方向が可変となっている。なお、第1実施形態と同一もしくは均等である部分には、図中、同一符号を付して、説明を省略する。
本実施形態の気流搬送装置は、図6に示すように、イオン風発生器3、電源回路40、制御装置50、送出方向調整部70、および空調装置等にて構成される。なお、空調装置については公知技術に従っているので、全体構成の図示と説明は省略し、吹出部5のみを連続気流送風部として図示する。
車両1のダッシュボード2には第1実施形態と同様にイオン風発生器3、電源回路40および制御装置50、送出方向調整部70が配され、吹出部5はダッシュボード2の前面部に取り付けられている。また、吹出部5はイオン風発生器3よりも車両上下方向の上側に取り付けられている。
吹出部5には空調用空気の吹き出し方向を調節するためのルーバー51が付属している。このルーバー51の動作すなわち吹き出し方向は、図示しないエアコンECUによって制御される。
イオン風発生器3、電源回路40および制御装置50は第1実施形態と同一であるので、図2を援用して、詳細の図示と説明を省略する。本実施形態においては、イオン風発生器3は渦輪送出部として機能する。
送出方向調整部70は、イオン風発生器3によって送出される渦輪の送出方向を調整する装置である。より具体的には、送出方向調整部70は、制御装置50からの制御信号に従って、ケース10の姿勢を変化させる装置(例えばステッピングモータ)である。
送出方向調整部70によってケース10の姿勢が変化することで、イオン風発生器3から送出される渦輪の送出方向が変化する。より具体的には、渦輪の送出方向の水平方向に対する角度(すなわち仰角)が変化する。なお、本実施形態では、渦輪の送出方向については、上記仰角のみが可変となっている。
次に、本実施形態の作動について図7以下を参照して説明する。まず、エアコンECUによって制御されるエアコンの動作について、図7に従って説明する。エアコンECUは、図7の処理を、繰り返し定期的に(例えば1秒に1回)実行するようになっている。
エアコンECUは、車室外の温度(すなわち外気温)を検出する外気温センサ、車室内の温度(すなわち内気温)を検出する内気温センサ、ユーザによる車室内の温度の設定を検出するセンサ等の各種のセンサ類からのセンサ情報を取得する(ステップS210)。
次に、エアコンECUは、取得したセンサ情報に基づいて空調用空気の送風レベルを決定し(ステップS220)、その送風方向を決定する(ステップS230)。送風レベルは正の値であり、送風レベルが大きいほど、吹出部5から出る空調用空気の風量が大きくなる。送風方向は、水平方向に対する上下方向の角度として決定される。
続いてエアコンECUは、空調に関わるその他の制御量を決定する(ステップS240)。その他の制御量としては、周知のエアミックス開度、吹出口モード、吸込口モード等がある。そして、上記の決定事項に従って各種アクチュエータを制御する(ステップS250)。これらのアクチュエータにはルーバー51の吹き出し方向を調節するためのアクチュエータも含まれている。
こうして、ステップS220で決定した送風レベルの空調用空気が、ステップS230で決定した送風方向へと、吹出部5から送風される。
制御装置50は、渦輪を送出する必要が発生した際に、図8の処理を実行する。渦輪を送出する必要が発生する場合としては、例えば、車両の乗員が不図示の渦輪送出スイッチを操作した場合、車両の運転者の覚醒度が低下していることを不図示の眠気検出装置が検出した場合等がある。
制御装置50は、図8の処理において、まず、空調用空気の送風レベルと送風方向の情報を取得する(ステップS310)。エアコンECUは、これらの情報を、繰り返し定期的に(例えば1秒に1回)、制御装置50に出力している。そして、制御装置50は、このようにして繰り返し出力された情報を記憶しており、記憶している情報のうち、ステップS310の時点で最新のものを、送風レベルと送風方向の情報として取得する。
続いて制御装置50は、それら取得した情報に応じてイオン風発生器3による渦輪の送出方向を決定する(ステップS320)。このステップS320において決定される渦輪の送出方向は、図9に示すように、空調用空気の送風レベルが「弱」か「強」か、および、空調用空気の送風方向が渦輪Rの送風対象(すなわち渦輪Rの到達先)の範囲内であるか否かに応じて決まる。このようにすることで、吹出部5からの送風方向および風量に応じて、渦輪の送出方向を柔軟に変更することができる。
具体的には、制御装置50は、ステップS310で取得した送風レベルが所定の基準値未満である場合に、送風レベルが「弱」であると判定し、当該基準値以上である場合に「強」であると判定する。
また、制御装置50は、ステップS310で取得した送風方向を示す角度が、あらかじめ定められた角度範囲内に入っている場合に、空調用空気の送風方向が渦輪Rの送風対象の範囲内であると判定する。また、制御装置50は、ステップS310で取得した送風方向を示す角度が、あらかじめ定められた角度範囲内に入っていない場合に、空調用空気の送風方向が渦輪Rの送風対象の範囲外であると判定する。この角度範囲は、送風対象の領域(例えば運転席に着座する乗員Pの顔の位置として通常想定される領域)に届く角度範囲としてあらかじめ定められた範囲である。
制御装置50は、ステップS320で、送風方向が送風対象の範囲内であるときには、送風レベルが「弱」、「強」のいずれの場合も、渦輪Rを空調用空気の連続風に乗せるよう、すなわち、渦輪Rが空調用空気の連続風に流されることで渦輪Rの送風対象に到達するよう、渦輪Rの送出方向を設定する。
図10Aを参照して具体的に説明する。図10Aの例では渦輪Rの送風対象が乗員Pの顔に設定されている。この例では、乗員Pの顔(すなわち、送風対象)に相当する角度範囲内を空調用空気ACの送風方向が向いていれば、制御装置50は、空調用空気ACの連続風に渦輪を乗せるよう渦輪の送出方向を決定する。
より具体的には、制御装置50は、吹出部5から送風対象までの直線経路上のいずれかに渦輪の送出方向の延長線が交差するよう、送出方向調整部70に、渦輪の送出方向の仰角を指示する。これにより、送出方向調整部70は、ケース10の姿勢を変化させて、指示された渦輪の送出方向の仰角を実現する。
この際、送風方向が送風対象の範囲内であり且つ送風レベルが「弱」の場合は、送風方向が送風対象の範囲内であり且つ送風レベルが「強」の場合よりも、上記仰角を小さくする。これは、空調用空気ACの連続風が弱い場合は、強い場合に比べて、渦輪が空調用空気ACの連続風に合流するまでの経路長を長く取るためである。空調用空気ACの連続風が弱いときに、渦輪が空調用空気ACの連続風に合流するまでの経路長を短くすると、渦輪が空調用空気ACの連続風を突き抜けてしまう可能性が高くなるからである。
送風方向が送風対象の範囲内であり且つ送風レベルが「弱」の場合における上記仰角の値、および送風方向が送風対象の範囲内であり且つ送風レベルが「強」の場合における上記仰角の値は、あらかじめ実験等により定められ、制御装置50のROMまたはフラッシュメモリに記憶されている。ROMまたはフラッシュメモリは、非遷移的実体的記憶媒体である。そして制御装置50は、この記憶された各場合における仰角の値を利用して、送出方向調整部70に指示する仰角を決定し、実際に送出方向調整部70に指示する。これにより、送出方向調整部70は、ケース10の姿勢を変化させて、指示された渦輪の送出方向の仰角を実現する。
また、制御装置50は、ステップS320で、送風方向が送風対象の範囲外であり、かつ、送風レベルが「弱」である場合、図10Bに示すように、渦輪Rが空調用空気の連続風を突き抜けて渦輪Rの送風対象に到達するよう、渦輪Rの送出方向を設定する。
渦輪Rが空調用空気の連続風を突き抜けて渦輪Rの送風対象に到達するために渦輪Rがイオン風発生器3から送出されるべき方向を決める仰角は、連続風の送風レベルおよび送風方向の異なる複数の組み合わせの各々対してあらかじめ実験等により定められ、制御装置50のROMまたはフラッシュメモリに対応表として記憶されている。そして制御装置50は、ステップS310で取得した送風レベルおよび送風方向を、当該対応表に適用することで、渦輪Rがイオン風発生器3から送出されるべき方向を決める仰角を決定し、実際に送出方向調整部70に指示する。これにより、送出方向調整部70は、ケース10の姿勢を変化させて、指示された渦輪の送出方向の仰角を実現する。
また、制御装置50は、ステップS320で、送風方向が送風対象の範囲外であり、かつ、送風レベルが「強」である場合、渦輪の送出方向の仰角を、あらかじめ定められたデフォルト角度に決定し、実際に送出方向調整部70に指示する。これにより、送出方向調整部70は、ケース10の姿勢を変化させて、指示された渦輪の送出方向の仰角を実現する。この作動は、送風方向が送風対象の範囲外となりかつ送風レベルが「強」である場合、渦輪Rを送風対象に到達させることは不可能であるという観点に基づいたものである。
デフォルト角度は、例えば、90°以下の範囲における最大値でもよい。例えば、実現可能な仰角の範囲が0°以上60°以下である場合、渦輪の送出方向の仰角を60°に決定してもよい。
制御装置50は、ステップS320に続いて、ステップS325で、芳香発生器60を制御して稼働させる。すると、芳香発生器60から胴体部11内に芳香成分を含んだエアロゾルが噴出される。
続いて制御装置50は、ステップS330で、第1実施形態のステップS130と同じ方法で、渦輪生成処理を実行する。すなわち、電源回路40を制御して、その出力電圧をパルス印加時間T2だけ、−3kVに変化させる。
この渦輪生成処理により、放電電極20と基準電極30の間にコロナ放電が発生し、放電電極20の周囲の空気が電離して正イオンと負イオンが生成され、負のイオンの移動に伴ってイオン風が発生し、イオン風が噴射口12aから噴射される。この際に、胴体部11内に滞留していた芳香成分のエアロゾルがイオン風に随伴して噴射される。そして、噴射口12aから吹き出されたイオン風は、芳香成分を含んだ渦輪となる。
このような制御により、送風方向が送風対象の範囲内である場合、図10Aに示すように、渦輪Rは、イオン風発生器3から送出された後、空調用空気ACの連続風に合流して当たり、更に、連続風に押されながら、進路を曲げて、連続風と同じ経路で、乗員Pの顔に到達する。このようにすることで、吹出部5からの送風方向または風量に応じて、渦輪の送出方向を柔軟に変更することができる。
また、送風方向が送風対象の範囲外であり、かつ、送風レベルが「弱」である場合、図10Bに示すように、渦輪Rは、イオン風発生器3から送出された後、空調用空気ACの連続風に合流して当たり、更に、連続風に押されて進路を曲げながら連続風を突き抜ける。そしてその後、渦輪Rは、連続風とは異なる経路で、乗員Pの顔に到達する。このようにすることで、吹出部5からの風の進路と渦輪の進路が交差しても、渦輪を風とは異なる経路で進ませることができる。
また、送風方向が送風対象の範囲外であり、かつ、送風レベルが「強」である場合、渦輪Rは、イオン風発生器3から送出された後、空調用空気ACの連続風に合流し、更に、連続風にと同じ経路を辿りながら進む。しかし、渦輪Rは、送風対象である乗員Pの顔には到達しない。
このように、本実施形態では、制御装置50は、吹出部5から送風が行われているときに、この送風によって流れる風に渦輪が当たって渦輪の進路が曲がるよう、イオン風発生器3による渦輪の送出方向を制御する。
このようになっていることで、渦輪の進路を乱すような外乱気流があったとしても、吹出部5から流れる風に渦輪を当てて渦輪の進路を曲げることで、渦輪の進路が外乱気流に乱される可能性が低減する。これは、吹出部5から流れる風が外乱気流よりも安定しているからである。
(他の実施形態)
なお、本発明は上記した実施形態に限定されるものではなく、特許請求の範囲に記載した範囲内において適宜変更が可能である。また、上記各実施形態は、互いに無関係なものではなく、組み合わせが明らかに不可な場合を除き、適宜組み合わせが可能である。また、上記各実施形態において、実施形態を構成する要素は、特に必須であると明示した場合および原理的に明らかに必須であると考えられる場合等を除き、必ずしも必須のものではない。また、上記各実施形態において、実施形態の構成要素の個数、数値、量、範囲等の数値が言及されている場合、特に必須であると明示した場合および原理的に明らかに特定の数に限定される場合等を除き、その特定の数に限定されるものではない。特に、ある量について複数個の値が例示されている場合、特に別記した場合および原理的に明らかに不可能な場合を除き、それら複数個の値の間の値を採用することも可能である。また、上記各実施形態において、構成要素等の形状、位置関係等に言及するときは、特に明示した場合および原理的に特定の形状、位置関係等に限定される場合等を除き、その形状、位置関係等に限定されるものではない。また、本発明は、上記各実施形態に対する以下のような変形例も許容される。なお、以下の変形例は、それぞれ独立に、上記実施形態に適用および不適用を選択できる。すなわち、以下の変形例のうち任意の組み合わせを、上記実施形態に適用することができる。
なお、本発明は上記した実施形態に限定されるものではなく、特許請求の範囲に記載した範囲内において適宜変更が可能である。また、上記各実施形態は、互いに無関係なものではなく、組み合わせが明らかに不可な場合を除き、適宜組み合わせが可能である。また、上記各実施形態において、実施形態を構成する要素は、特に必須であると明示した場合および原理的に明らかに必須であると考えられる場合等を除き、必ずしも必須のものではない。また、上記各実施形態において、実施形態の構成要素の個数、数値、量、範囲等の数値が言及されている場合、特に必須であると明示した場合および原理的に明らかに特定の数に限定される場合等を除き、その特定の数に限定されるものではない。特に、ある量について複数個の値が例示されている場合、特に別記した場合および原理的に明らかに不可能な場合を除き、それら複数個の値の間の値を採用することも可能である。また、上記各実施形態において、構成要素等の形状、位置関係等に言及するときは、特に明示した場合および原理的に特定の形状、位置関係等に限定される場合等を除き、その形状、位置関係等に限定されるものではない。また、本発明は、上記各実施形態に対する以下のような変形例も許容される。なお、以下の変形例は、それぞれ独立に、上記実施形態に適用および不適用を選択できる。すなわち、以下の変形例のうち任意の組み合わせを、上記実施形態に適用することができる。
(変形例1)
第1実施形態では、プレ送風において連続的な気流を発生させているが、プレ送付では間欠的な送風を繰り返してもよい。例えば、複数の渦輪Rを間欠的に送出することでプレ送風となしてもよい。このように構成しても、プレ送風によって外乱を整えて、後続する渦輪Rの進路を安定させることができる。
第1実施形態では、プレ送風において連続的な気流を発生させているが、プレ送付では間欠的な送風を繰り返してもよい。例えば、複数の渦輪Rを間欠的に送出することでプレ送風となしてもよい。このように構成しても、プレ送風によって外乱を整えて、後続する渦輪Rの進路を安定させることができる。
(変形例2)
第1、2実施形態では、渦輪Rの送出に先立って芳香成分を吐出させているが、渦輪Rの送出と同時に芳香成分を吐出してもよい。
第1、2実施形態では、渦輪Rの送出に先立って芳香成分を吐出させているが、渦輪Rの送出と同時に芳香成分を吐出してもよい。
(変形例3)
第1実施形態では、時間T2>時間T0であったが、逆に時間T2<時間T0でもよい。プレ送風時間T0時間は僅かであっても、プレ送風による外乱気流の抑制効果はある程度は発揮される。
第1実施形態では、時間T2>時間T0であったが、逆に時間T2<時間T0でもよい。プレ送風時間T0時間は僅かであっても、プレ送風による外乱気流の抑制効果はある程度は発揮される。
(変形例4)
第1実施形態においては、送風部と渦輪送出部は同じイオン風発生器3によって実現しているが、送風部を実現する装置が渦輪送出部を実現する装置とは別に設けられていてもよい。
第1実施形態においては、送風部と渦輪送出部は同じイオン風発生器3によって実現しているが、送風部を実現する装置が渦輪送出部を実現する装置とは別に設けられていてもよい。
(変形例5)
第1、第2実施形態では、渦輪に香り成分が付与されているが、渦輪に付与されるのは水蒸気であってもよい。この場合は、渦輪が高い湿度を有することになる。また、渦輪に空気以外の成分が付与されなくてもよい。
何も添加しなくてもよい
第1、第2実施形態では、渦輪に香り成分が付与されているが、渦輪に付与されるのは水蒸気であってもよい。この場合は、渦輪が高い湿度を有することになる。また、渦輪に空気以外の成分が付与されなくてもよい。
何も添加しなくてもよい
(変形例6)
第1実施形態では、プレ送風によって風が通った領域以外を渦輪が通るが、必ずしもこのようになっておらずともよい。プレ送風によって風が通った領域を渦輪が通らなくても、渦輪の進路が外乱気流に乱される可能性は低減する。プレ送風による整流効果は、プレ送風によって風が通った領域以外にも及ぶからである。
第1実施形態では、プレ送風によって風が通った領域以外を渦輪が通るが、必ずしもこのようになっておらずともよい。プレ送風によって風が通った領域を渦輪が通らなくても、渦輪の進路が外乱気流に乱される可能性は低減する。プレ送風による整流効果は、プレ送風によって風が通った領域以外にも及ぶからである。
(変形例7)
第2実施形態において、制御装置50は、送風方向が送風対象の範囲外であり、かつ、送風レベルが「強」である場合、渦輪を送出しないようになっていてもよい。
第2実施形態において、制御装置50は、送風方向が送風対象の範囲外であり、かつ、送風レベルが「強」である場合、渦輪を送出しないようになっていてもよい。
(変形例8)
第2実施形態において、制御装置50は、機械的にイオン風発生器3のケース10の姿勢を変化させることで、渦輪の送出方向を調整している。しかし、渦輪の送出方向は、電気的に変化させてもよい。例えば、基準電極30をケース10の内部の異なる場所に2個配置し、放電電極20と基準電極30の間の放電時に、それら2個の基準電極30の間の電位差を変化させることで、渦輪の送出方向を変化させてもよい。
第2実施形態において、制御装置50は、機械的にイオン風発生器3のケース10の姿勢を変化させることで、渦輪の送出方向を調整している。しかし、渦輪の送出方向は、電気的に変化させてもよい。例えば、基準電極30をケース10の内部の異なる場所に2個配置し、放電電極20と基準電極30の間の放電時に、それら2個の基準電極30の間の電位差を変化させることで、渦輪の送出方向を変化させてもよい。
(変形例9)
第1、第2実施形態では、コロナ放電を用いて電気的に渦輪を発生するようになっている。しかし、渦輪は別の機構(例えばスピーカ)によって発生させてもよい。
第1、第2実施形態では、コロナ放電を用いて電気的に渦輪を発生するようになっている。しかし、渦輪は別の機構(例えばスピーカ)によって発生させてもよい。
(変形例10)
第2実施形態では、渦輪の送出方向の調整が行われているが、渦輪の送出方向のみならず送出速度も、例えば、放電電極20と基準電極30の間に印加する電圧を調整することで、目的の渦輪の進路を実現するために、調整してもよい。
第2実施形態では、渦輪の送出方向の調整が行われているが、渦輪の送出方向のみならず送出速度も、例えば、放電電極20と基準電極30の間に印加する電圧を調整することで、目的の渦輪の進路を実現するために、調整してもよい。
(変形例11)
第1実施形態では、プレ送風が行われ、その後、プレ送風の停止が行われた後に、その停止によって風速が低下した領域を渦輪が進むようになっている。しかし、必ずしもプレ送風は停止しなくともよい。
第1実施形態では、プレ送風が行われ、その後、プレ送風の停止が行われた後に、その停止によって風速が低下した領域を渦輪が進むようになっている。しかし、必ずしもプレ送風は停止しなくともよい。
例えば、プレ送風の風量が低下し、その後、その低下によって風速が低下した領域を渦輪が進むようになっていてもよい。また例えば、プレ送風の風向が変化し、その後、その変化によって風速が低下した領域を渦輪が進むようになっていてもよい。
つまり、プレ送風の風量の低減または風向の変更が行われた後に、当該低減または当該変更によって風速が低下した領域を渦輪が進めばよい。なお、プレ送風の停止は、プレ送風の風量の低減の一例である。
(まとめ)
上記各実施形態および変形例の一部または全部で示された第1の観点によれば、気流搬送装置は、空気の渦輪を送出する渦輪送出部と、送風部によって送風が行われ、その後、前記送風部による送風の風量の低減または風向の変更が行われた後に、前記低減または前記変更によって風速が低下した領域を前記渦輪が進むよう、前記渦輪送出部による前記渦輪の送出タイミングを制御する制御部と、を備える。
上記各実施形態および変形例の一部または全部で示された第1の観点によれば、気流搬送装置は、空気の渦輪を送出する渦輪送出部と、送風部によって送風が行われ、その後、前記送風部による送風の風量の低減または風向の変更が行われた後に、前記低減または前記変更によって風速が低下した領域を前記渦輪が進むよう、前記渦輪送出部による前記渦輪の送出タイミングを制御する制御部と、を備える。
また、第2の観点によれば、前記渦輪送出部は、前記送風部によって送風が行われ、前記送風部による送風が停止した後に、前記送風部の送風によって風が通った領域を前記渦輪が通るよう、前記渦輪を送出する。
送風部の送風による整流効果は、送風部の送風によって風が通った領域以外にも及ぶが、当該領域内の方がより顕著である。したがって、送風部の送風によって風が通った領域を渦輪が通る場合は、渦輪の進路が外乱気流に乱される可能性がより低減する。
また、第3の観点によれば、前記渦輪送出部は、前記送風部による送風が停止した後に、インターバル時間が経過したことに基づいて、前記渦輪を送出する。インターバル時間が無い場合、渦輪がプレ送風によって生成された風に追い付いて当たることで、当該渦輪が崩壊してしまう可能性がある。渦輪の進行速度は、渦輪を形成しない風の進行速度よりも高くなる場合があるからである。したがって、インターバル時間を設定することで、渦輪崩壊の可能性を低減することができる。
また、第4の観点によれば、前記渦輪送出部として機能すると共に前記送風部として機能するイオン風発生器(3)は、放電電極(20)と、前記放電電極と離れて配置された基準電極(30)と、前記基準電極を挟んで前記放電電極とは反対側に配置された噴射口(12a)と、前記放電電極と前記基準電極との間に放電を誘起させる出力電圧を印加するための電源回路(40)と、を備え、前記制御部は、前記電源回路を制御して、前記噴射口から吹き出されるイオン風が前記渦輪を形成し得る所定の時間(T2)だけ前記出力電圧を印加させることで、前記イオン風発生器を前記渦輪送出部として機能させ、前記制御部は、前記所定の時間よりも長く前記出力電圧を印加させて前記噴射口から吹き出されるイオン風を連続的な気流とさせることで、前記イオン風発生器を前記送風部として機能させる。
このように、同一のイオン風発生器からまず連続的な気流を送風し、その後に渦輪を送出することで、連続的な気流の送風の停止後に残留した気流に渦輪を乗せることができる。したがって、渦輪をより安定して目標に到達させることができる。
また、第5の観点によれば、気流搬送装置は、空気の渦輪を送出する渦輪送出部(3)と、送風部(3、5)によって送風が行われているときに、前記送風部の送風によって流れる風に前記渦輪が当たって前記渦輪の進路が曲がるよう、前記渦輪送出部による前記渦輪の送出を制御する制御部(50)と、を備える。
また、第6の観点によれば、前記制御部は、前記送風部による送風方向に応じて、または、前記送風部によって送風される風量に応じて、前記渦輪送出部による前記渦輪の送出方向を制御する。
このようにすることで、送風部による送風方向または風量に応じて、渦輪の送出方向を柔軟に変更することができる。
また、第7の観点によれば、前記制御部は、前記渦輪が前記風に当たり、更に、前記渦輪が前記風に押されながら進路を曲げて前記風と同じ経路で進むよう、前記渦輪送出部による前記渦輪の送出方向を制御する。このようにすることで、送風部による風に載せて渦輪を移動させることができる。
また、第8の観点によれば、前記制御部は、前記渦輪が前記風に当たり、更に、前記渦輪が前記風に押されて進路を曲げながら前記風を突き抜けて進むよう、前記渦輪送出部による前記渦輪の送出方向を制御する。このようにすることで、送風部による風の進路と渦輪の進路が交差しても、渦輪を風とは異なる経路で進ませることができる。
3 イオン風発生器
5 吹出部
12a 噴射口
20 放電電極
30 基準電極
40 電源回路
50 制御装置
60 芳香発生器
70 送出方向調整部
5 吹出部
12a 噴射口
20 放電電極
30 基準電極
40 電源回路
50 制御装置
60 芳香発生器
70 送出方向調整部
Claims (8)
- 空気の渦輪を送出する渦輪送出部(3)と、
送風部(3、5)によって送風が行われ、その後、前記送風部による送風の風量の低減または風向の変更が行われた後に、前記低減または前記変更によって風速が低下した領域を前記渦輪が進むよう、前記渦輪送出部による前記渦輪の送出タイミングを制御する制御部(50)と、を備えた気流搬送装置。 - 前記渦輪送出部は、前記送風部によって送風が行われ、前記送風部による送風が停止した後に、前記送風部の送風によって風が通った領域を前記渦輪が通るよう、前記渦輪を送出する請求項1に記載の気流搬送装置。
- 前記渦輪送出部は、前記送風部による送風が停止した後に、インターバル時間(T1)が経過したことに基づいて、前記渦輪を送出する請求項2に記載の気流搬送装置。
- 前記渦輪送出部として機能すると共に前記送風部として機能するイオン風発生器(3)は、
放電電極(20)と、
前記放電電極と離れて配置された基準電極(30)と、
前記基準電極を挟んで前記放電電極とは反対側に配置された噴射口(12a)と、
前記放電電極と前記基準電極との間に放電を誘起させる出力電圧を印加するための電源回路(40)と、を備え、
前記制御部は、前記電源回路を制御して、前記噴射口から吹き出されるイオン風が前記渦輪を形成し得る所定の時間(T2)だけ前記出力電圧を印加させることで、前記イオン風発生器を前記渦輪送出部として機能させ、
前記制御部は、前記所定の時間よりも長く前記出力電圧を印加させて前記噴射口から吹き出されるイオン風を連続的な気流とさせることで、前記イオン風発生器を前記送風部として機能させる請求項2または3に記載の気流搬送装置。 - 空気の渦輪を送出する渦輪送出部(3)と、
送風部(3、5)によって送風が行われているときに、前記送風部の送風によって流れる風に前記渦輪が当たって前記渦輪の進路が曲がるよう、前記渦輪送出部による前記渦輪の送出を制御する制御部(50)と、を備えた気流搬送装置。 - 前記制御部は、前記送風部による送風方向に応じて、または、前記送風部によって送風される風量に応じて、前記渦輪送出部による前記渦輪の送出方向を制御する請求項5に記載の気流搬送装置。
- 前記制御部は、前記渦輪が前記風に当たり、更に、前記渦輪が前記風に押されながら進路を曲げて前記風と同じ経路で進むよう、前記渦輪送出部による前記渦輪の送出方向を制御する請求項5または6に記載の気流搬送装置。
- 前記制御部は、前記渦輪が前記風に当たり、更に、前記渦輪が前記風に押されて進路を曲げながら前記風を突き抜けて進むよう、前記渦輪送出部による前記渦輪の送出方向を制御する請求項5または6に記載の気流搬送装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018022210A JP2019139965A (ja) | 2018-02-09 | 2018-02-09 | 気流搬送装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018022210A JP2019139965A (ja) | 2018-02-09 | 2018-02-09 | 気流搬送装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2019139965A true JP2019139965A (ja) | 2019-08-22 |
Family
ID=67695442
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018022210A Pending JP2019139965A (ja) | 2018-02-09 | 2018-02-09 | 気流搬送装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2019139965A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021048074A (ja) * | 2019-09-19 | 2021-03-25 | 株式会社キーエンス | 除電器 |
| JP2021098393A (ja) * | 2019-12-20 | 2021-07-01 | 本田技研工業株式会社 | 芳香装置の設置構造 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016033441A (ja) * | 2014-07-31 | 2016-03-10 | 豊和化成株式会社 | 空気吹出装置 |
| WO2017030078A1 (ja) * | 2015-08-19 | 2017-02-23 | 株式会社日本自動車部品総合研究所 | 噴流発生装置および噴流発生システム |
-
2018
- 2018-02-09 JP JP2018022210A patent/JP2019139965A/ja active Pending
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016033441A (ja) * | 2014-07-31 | 2016-03-10 | 豊和化成株式会社 | 空気吹出装置 |
| WO2017030078A1 (ja) * | 2015-08-19 | 2017-02-23 | 株式会社日本自動車部品総合研究所 | 噴流発生装置および噴流発生システム |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021048074A (ja) * | 2019-09-19 | 2021-03-25 | 株式会社キーエンス | 除電器 |
| JP7250649B2 (ja) | 2019-09-19 | 2023-04-03 | 株式会社キーエンス | 除電器 |
| JP2021098393A (ja) * | 2019-12-20 | 2021-07-01 | 本田技研工業株式会社 | 芳香装置の設置構造 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6531828B2 (ja) | 噴流発生装置および噴流発生システム | |
| US6174500B1 (en) | Negative ion generating apparatus | |
| JP4677530B2 (ja) | プラズマ生成装置およびプラズマ生成方法 | |
| JP6045607B2 (ja) | ホール効果スラスタ | |
| JP2019139965A (ja) | 気流搬送装置 | |
| EP1995527A1 (en) | Blower apparatus | |
| US10870334B2 (en) | Ionic wind delivery device | |
| JP2007326407A (ja) | 湿度制御装置 | |
| JP5317397B2 (ja) | 気流発生装置 | |
| JP4569498B2 (ja) | 車両用空気質成分供給装置 | |
| KR101308408B1 (ko) | 차량용 피부 보습기 | |
| JP2006282084A (ja) | 車両用空気質成分供給装置 | |
| JP6870446B2 (ja) | 噴流発生装置 | |
| WO2021054226A1 (ja) | 車両用空調装置 | |
| JP2011025192A (ja) | 静電霧化装置および静電霧化方法 | |
| JP2004292940A (ja) | 放電式金属ドット噴射装置および方法 | |
| JP2018176983A (ja) | 噴流発生装置 | |
| US9139022B2 (en) | Recording apparatus | |
| JP2019192358A (ja) | イオン風発生装置 | |
| JP2008195177A (ja) | 車両用芳香成分供給装置 | |
| JP2011084273A (ja) | 静電霧化装置を備えた空調装置 | |
| JP2018195384A (ja) | 渦輪送出装置 | |
| JP2019145307A (ja) | 渦輪送出装置 | |
| JP4543436B2 (ja) | イオン発生装置及び除電装置 | |
| JP2006282083A (ja) | 車両用空気質成分供給装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20201214 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210927 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20211005 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20220405 |