JP2019130643A - 長竿型研磨機 - Google Patents
長竿型研磨機 Download PDFInfo
- Publication number
- JP2019130643A JP2019130643A JP2018016666A JP2018016666A JP2019130643A JP 2019130643 A JP2019130643 A JP 2019130643A JP 2018016666 A JP2018016666 A JP 2018016666A JP 2018016666 A JP2018016666 A JP 2018016666A JP 2019130643 A JP2019130643 A JP 2019130643A
- Authority
- JP
- Japan
- Prior art keywords
- battery
- pad
- battery mounting
- straight line
- housing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000005498 polishing Methods 0.000 title claims abstract description 56
- 239000000428 dust Substances 0.000 claims description 41
- 238000009434 installation Methods 0.000 abstract 2
- 238000004891 communication Methods 0.000 description 47
- WABPQHHGFIMREM-UHFFFAOYSA-N lead(0) Chemical compound [Pb] WABPQHHGFIMREM-UHFFFAOYSA-N 0.000 description 41
- 230000007246 mechanism Effects 0.000 description 26
- 210000000078 claw Anatomy 0.000 description 11
- 230000004048 modification Effects 0.000 description 10
- 238000012986 modification Methods 0.000 description 10
- 239000000725 suspension Substances 0.000 description 7
- 210000001217 buttock Anatomy 0.000 description 5
- 230000008859 change Effects 0.000 description 5
- 230000004913 activation Effects 0.000 description 3
- 230000009467 reduction Effects 0.000 description 3
- 238000004140 cleaning Methods 0.000 description 2
- 230000008602 contraction Effects 0.000 description 2
- 238000003780 insertion Methods 0.000 description 2
- 230000037431 insertion Effects 0.000 description 2
- HBBGRARXTFLTSG-UHFFFAOYSA-N Lithium ion Chemical compound [Li+] HBBGRARXTFLTSG-UHFFFAOYSA-N 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 238000001816 cooling Methods 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 229910052602 gypsum Inorganic materials 0.000 description 1
- 239000010440 gypsum Substances 0.000 description 1
- 229910001416 lithium ion Inorganic materials 0.000 description 1
- 238000003754 machining Methods 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 238000005192 partition Methods 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
Images





















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B24—GRINDING; POLISHING
- B24B—MACHINES, DEVICES, OR PROCESSES FOR GRINDING OR POLISHING; DRESSING OR CONDITIONING OF ABRADING SURFACES; FEEDING OF GRINDING, POLISHING, OR LAPPING AGENTS
- B24B23/00—Portable grinding machines, e.g. hand-guided; Accessories therefor
- B24B23/005—Auxiliary devices used in connection with portable grinding machines, e.g. holders
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B24—GRINDING; POLISHING
- B24B—MACHINES, DEVICES, OR PROCESSES FOR GRINDING OR POLISHING; DRESSING OR CONDITIONING OF ABRADING SURFACES; FEEDING OF GRINDING, POLISHING, OR LAPPING AGENTS
- B24B23/00—Portable grinding machines, e.g. hand-guided; Accessories therefor
- B24B23/02—Portable grinding machines, e.g. hand-guided; Accessories therefor with rotating grinding tools; Accessories therefor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B24—GRINDING; POLISHING
- B24B—MACHINES, DEVICES, OR PROCESSES FOR GRINDING OR POLISHING; DRESSING OR CONDITIONING OF ABRADING SURFACES; FEEDING OF GRINDING, POLISHING, OR LAPPING AGENTS
- B24B27/00—Other grinding machines or devices
- B24B27/0007—Movable machines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B24—GRINDING; POLISHING
- B24B—MACHINES, DEVICES, OR PROCESSES FOR GRINDING OR POLISHING; DRESSING OR CONDITIONING OF ABRADING SURFACES; FEEDING OF GRINDING, POLISHING, OR LAPPING AGENTS
- B24B47/00—Drives or gearings; Equipment therefor
- B24B47/10—Drives or gearings; Equipment therefor for rotating or reciprocating working-spindles carrying grinding wheels or workpieces
- B24B47/12—Drives or gearings; Equipment therefor for rotating or reciprocating working-spindles carrying grinding wheels or workpieces by mechanical gearing or electric power
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B24—GRINDING; POLISHING
- B24B—MACHINES, DEVICES, OR PROCESSES FOR GRINDING OR POLISHING; DRESSING OR CONDITIONING OF ABRADING SURFACES; FEEDING OF GRINDING, POLISHING, OR LAPPING AGENTS
- B24B55/00—Safety devices for grinding or polishing machines; Accessories fitted to grinding or polishing machines for keeping tools or parts of the machine in good working condition
- B24B55/06—Dust extraction equipment on grinding or polishing machines
- B24B55/10—Dust extraction equipment on grinding or polishing machines specially designed for portable grinding machines, e.g. hand-guided
- B24B55/102—Dust extraction equipment on grinding or polishing machines specially designed for portable grinding machines, e.g. hand-guided with rotating tools
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B24—GRINDING; POLISHING
- B24B—MACHINES, DEVICES, OR PROCESSES FOR GRINDING OR POLISHING; DRESSING OR CONDITIONING OF ABRADING SURFACES; FEEDING OF GRINDING, POLISHING, OR LAPPING AGENTS
- B24B7/00—Machines or devices designed for grinding plane surfaces on work, including polishing plane glass surfaces; Accessories therefor
- B24B7/10—Single-purpose machines or devices
- B24B7/18—Single-purpose machines or devices for grinding floorings, walls, ceilings or the like
- B24B7/182—Single-purpose machines or devices for grinding floorings, walls, ceilings or the like for walls and ceilings
- B24B7/184—Single-purpose machines or devices for grinding floorings, walls, ceilings or the like for walls and ceilings pole sanders
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B24—GRINDING; POLISHING
- B24B—MACHINES, DEVICES, OR PROCESSES FOR GRINDING OR POLISHING; DRESSING OR CONDITIONING OF ABRADING SURFACES; FEEDING OF GRINDING, POLISHING, OR LAPPING AGENTS
- B24B23/00—Portable grinding machines, e.g. hand-guided; Accessories therefor
- B24B23/04—Portable grinding machines, e.g. hand-guided; Accessories therefor with oscillating grinding tools; Accessories therefor
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Finish Polishing, Edge Sharpening, And Grinding By Specific Grinding Devices (AREA)
- Grinding Of Cylindrical And Plane Surfaces (AREA)
- Grinding-Machine Dressing And Accessory Apparatuses (AREA)
Abstract
【課題】バッテリの装着時においてもコンパクトであり、バッテリが邪魔になり難い長竿型研磨機を提供する。【解決手段】長竿型研磨機の一例としてのドライウォールサンダ1は、角柱状のバッテリ86と、バッテリ86を装着可能なバッテリ装着部36と、バッテリ86の電力により駆動される電動モータと、研磨面を有しており電動モータの駆動力により運動するパッド146と、前端部にパッド146がヘッド部外側ハウジング130及び吊枠部6を介して接続される竿部2と、を備えている。バッテリ装着部36に装着されたバッテリ86における最長辺Jの方向は、竿部2の中心軸Mと、中心軸Mに直交し且つパッド146の研磨面に平行な第1仮想直線Lと、の双方に直交する第2仮想直線Kに対して角度を有している。【選択図】図10
Description
本発明は、ドライウォールサンダ、長竿型ポリッシャ、長竿型グラインダ、長竿型コンクリートカンナ等の長竿型研磨機に関する。
欧州特許第1961518号明細書(特許文献1)の図5に示されるように、蓄電池180を用いた長竿型の研磨/清掃機が知られている。
この機械は、長尺の保持機構12を有している。
保持機構12の一端には、図4に示されるように並行するバー78a,78bが形成されており、それらの先端部の間に、ツールヘッド16が、一対のピン部84を介して回転可能に接続されている。ツールヘッド16は、清掃ツールあるいは研磨工具のようなツール98を有する。
他方、保持機構12の他端には、駆動モータ178が、保持機構12の長手方向に沿うように配置されている。
以下、この機械における保持機構12の長手方向が前後方向とされ、ツールヘッド側が前側とされ、駆動モータ178側が後側とされる。又、この機械におけるツールヘッド16の保持機構12に対する回転軸の方向(ピン部84の延在方向)が左右方向とされ、左右方向及び前後方向に垂直な方向が上下方向とされる。
保持機構12の中央部には、保持機構12から突出したループハンドル122が設けられている。ループハンドル122は、保持機構12の一方側の長手方向中央部から僅かに外方に延びた後で略垂直に曲がって延び、更に略垂直に曲がり延びて保持機構12を超えた後に略垂直に曲がり保持機構12に近づく方向に延びて、再度略垂直に曲がり僅かに内方に延びて保持機構12の他方側の長手方向中央部につながる。ループハンドル122の保持機構12を超える部分は、左右方向を向いている。使用者が、ツールヘッド16を前にした状態で、ループハンドル122と反対側に立ってループハンドル122の保持機構12を超える部分を両手でつかんだ場合における、使用者からみた左側がこの機械の左側であり、使用者からみた右側がこの機械の右側である。
そして、駆動モータ178の後方には、直方体状の蓄電池180が、保持機構12及び駆動モータ178に対して上方に突出する状態で設置されている。蓄電池180は、設置時、その最長辺が上下方向となっている。即ち、当該最長辺は、保持機構12の中心軸(前後方向の仮想軸)と、その中心軸に直交し且つツール98に平行な第1仮想直線(左右方向の仮想直線)と、の双方に直交している。
この機械は、長尺の保持機構12を有している。
保持機構12の一端には、図4に示されるように並行するバー78a,78bが形成されており、それらの先端部の間に、ツールヘッド16が、一対のピン部84を介して回転可能に接続されている。ツールヘッド16は、清掃ツールあるいは研磨工具のようなツール98を有する。
他方、保持機構12の他端には、駆動モータ178が、保持機構12の長手方向に沿うように配置されている。
以下、この機械における保持機構12の長手方向が前後方向とされ、ツールヘッド側が前側とされ、駆動モータ178側が後側とされる。又、この機械におけるツールヘッド16の保持機構12に対する回転軸の方向(ピン部84の延在方向)が左右方向とされ、左右方向及び前後方向に垂直な方向が上下方向とされる。
保持機構12の中央部には、保持機構12から突出したループハンドル122が設けられている。ループハンドル122は、保持機構12の一方側の長手方向中央部から僅かに外方に延びた後で略垂直に曲がって延び、更に略垂直に曲がり延びて保持機構12を超えた後に略垂直に曲がり保持機構12に近づく方向に延びて、再度略垂直に曲がり僅かに内方に延びて保持機構12の他方側の長手方向中央部につながる。ループハンドル122の保持機構12を超える部分は、左右方向を向いている。使用者が、ツールヘッド16を前にした状態で、ループハンドル122と反対側に立ってループハンドル122の保持機構12を超える部分を両手でつかんだ場合における、使用者からみた左側がこの機械の左側であり、使用者からみた右側がこの機械の右側である。
そして、駆動モータ178の後方には、直方体状の蓄電池180が、保持機構12及び駆動モータ178に対して上方に突出する状態で設置されている。蓄電池180は、設置時、その最長辺が上下方向となっている。即ち、当該最長辺は、保持機構12の中心軸(前後方向の仮想軸)と、その中心軸に直交し且つツール98に平行な第1仮想直線(左右方向の仮想直線)と、の双方に直交している。
このような機械では、蓄電池180が上方に突出しているため、蓄電池180は、その分コンパクトではなく、使用者あるいは被加工材に当たるといったように、邪魔になる可能性がある。
そこで、本発明の主な目的は、バッテリの装着時においてもコンパクトであり、バッテリが邪魔になり難い長竿型研磨機を提供することである。
そこで、本発明の主な目的は、バッテリの装着時においてもコンパクトであり、バッテリが邪魔になり難い長竿型研磨機を提供することである。
上記目的を達成するために、請求項1に記載の発明は、角柱状又は円柱状のバッテリと、前記バッテリを装着可能なバッテリ装着部と、前記バッテリの電力により駆動される電動モータと、研磨面を有しており前記電動モータの駆動力により運動するパッドと、端部に前記パッドが接続される竿部と、を備えており、前記バッテリ装着部に装着された前記バッテリにおける最長辺の方向は、前記竿部の中心軸と、前記中心軸に直交し且つ前記パッドの前記研磨面に平行な第1仮想直線と、の双方に直交する第2仮想直線に対して角度を有していることを特徴とするものである。
請求項2に記載の発明は、上記発明において、前記バッテリ装着部に装着された前記バッテリの前記最長辺の方向は、前記第1仮想直線と同じ方向であることを特徴とするものである。
請求項3に記載の発明は、上記発明において、前記バッテリ装着部に装着された前記バッテリにおける前記第2仮想直線の方向の中央部は、前記第1仮想直線の方向からみて前記竿部の前記中心軸上にあることを特徴とするものである。
請求項4に記載の発明は、上記発明において、前記竿部における前記パッドと反対側の端部に取り付けられたハンドル部を備えており、前記ハンドル部は、使用者が把持可能であるグリップ部と、集塵ホースを接続可能である集塵ホース接続部と、を有しており、前記バッテリ装着部に装着された前記バッテリは、前記第2仮想直線の方向において、前記グリップ部と前記集塵ホース接続部との間に配置されていることを特徴とするものである。
請求項5に記載の発明は、上記発明において、前記バッテリ装着部に装着された前記バッテリの前記最長辺の方向は、前記竿部の前記中心軸に対して角度を有していることを特徴とするものである。
請求項6に記載の発明は、上記発明において、前記バッテリ装着部は、複数の前記バッテリを装着可能であることを特徴とするものである。
請求項7に記載の発明は、上記発明において、前記バッテリ装着部は、前記竿部を挟むように複数設けられており、複数の前記バッテリのうちの一部は、一部の前記バッテリ装着部に装着され、複数の前記バッテリのうちの他の一部は、他の一部の前記バッテリ装着部に装着されることを特徴とするものである。
請求項8に記載の発明は、上記発明において、前記バッテリ装着部に装着された前記バッテリの前記最長辺の方向は、前記竿部の前記中心軸と同じ方向であることを特徴とするものである。
請求項9に記載の発明は、上記発明において、前記電動モータ及び前記パッドは、ヘッド部ハウジングに保持されており、前記バッテリ装着部は、前記ヘッド部ハウジングに配置されていることを特徴とするものである。
請求項10に記載の発明は、上記発明において、前記バッテリ装着部は、前記ヘッド部ハウジングの上部に配置されていることを特徴とするものである。
請求項11に記載の発明は、上記発明において、前記バッテリ装着部は、前記ヘッド部ハウジングの側部に配置されていることを特徴とするものである。
請求項12に記載の発明は、上記発明において、前記竿部における前記パッドと反対側の端部に取り付けられたハンドル部を備えており、前記ハンドル部は、集塵ホースを接続可能である集塵ホース接続部を有しており、前記バッテリ装着部は、前記ハンドル部における、前記集塵ホース接続部より前記パッドに近い部分に配置されていることを特徴とするものである。
請求項2に記載の発明は、上記発明において、前記バッテリ装着部に装着された前記バッテリの前記最長辺の方向は、前記第1仮想直線と同じ方向であることを特徴とするものである。
請求項3に記載の発明は、上記発明において、前記バッテリ装着部に装着された前記バッテリにおける前記第2仮想直線の方向の中央部は、前記第1仮想直線の方向からみて前記竿部の前記中心軸上にあることを特徴とするものである。
請求項4に記載の発明は、上記発明において、前記竿部における前記パッドと反対側の端部に取り付けられたハンドル部を備えており、前記ハンドル部は、使用者が把持可能であるグリップ部と、集塵ホースを接続可能である集塵ホース接続部と、を有しており、前記バッテリ装着部に装着された前記バッテリは、前記第2仮想直線の方向において、前記グリップ部と前記集塵ホース接続部との間に配置されていることを特徴とするものである。
請求項5に記載の発明は、上記発明において、前記バッテリ装着部に装着された前記バッテリの前記最長辺の方向は、前記竿部の前記中心軸に対して角度を有していることを特徴とするものである。
請求項6に記載の発明は、上記発明において、前記バッテリ装着部は、複数の前記バッテリを装着可能であることを特徴とするものである。
請求項7に記載の発明は、上記発明において、前記バッテリ装着部は、前記竿部を挟むように複数設けられており、複数の前記バッテリのうちの一部は、一部の前記バッテリ装着部に装着され、複数の前記バッテリのうちの他の一部は、他の一部の前記バッテリ装着部に装着されることを特徴とするものである。
請求項8に記載の発明は、上記発明において、前記バッテリ装着部に装着された前記バッテリの前記最長辺の方向は、前記竿部の前記中心軸と同じ方向であることを特徴とするものである。
請求項9に記載の発明は、上記発明において、前記電動モータ及び前記パッドは、ヘッド部ハウジングに保持されており、前記バッテリ装着部は、前記ヘッド部ハウジングに配置されていることを特徴とするものである。
請求項10に記載の発明は、上記発明において、前記バッテリ装着部は、前記ヘッド部ハウジングの上部に配置されていることを特徴とするものである。
請求項11に記載の発明は、上記発明において、前記バッテリ装着部は、前記ヘッド部ハウジングの側部に配置されていることを特徴とするものである。
請求項12に記載の発明は、上記発明において、前記竿部における前記パッドと反対側の端部に取り付けられたハンドル部を備えており、前記ハンドル部は、集塵ホースを接続可能である集塵ホース接続部を有しており、前記バッテリ装着部は、前記ハンドル部における、前記集塵ホース接続部より前記パッドに近い部分に配置されていることを特徴とするものである。
本発明の主な効果は、バッテリの装着時においてもコンパクトであり、バッテリが邪魔になり難い長竿型研磨機が提供されることである。
以下、本発明の実施の形態及びその変更例が、適宜図面に基づいて説明される。
当該形態は、長竿型研磨機の一例としてのドライウォールサンダに係るものである。
当該形態及び変更例における前後上下左右は、説明の便宜上定めたものであり、作業の状況及び移動する部材の状態の少なくとも一方等により変化することがある。
尚、本発明は、当該形態及び変更例に限定されない。
当該形態は、長竿型研磨機の一例としてのドライウォールサンダに係るものである。
当該形態及び変更例における前後上下左右は、説明の便宜上定めたものであり、作業の状況及び移動する部材の状態の少なくとも一方等により変化することがある。
尚、本発明は、当該形態及び変更例に限定されない。
[第1形態]
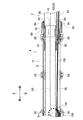
図1は、本発明の実施の第1形態に係るドライウォールサンダ1の左側からみた斜視図である。図2は、ドライウォールサンダ1の右側からみた斜視図である。図3は、ドライウォールサンダ1の右側面図である。図4は、ドライウォールサンダ1の前面図である。図5は、ドライウォールサンダ1の後部前の中央縦断面図である。図6は、ドライウォールサンダ1の後部後の中央縦断面図である。図7は、ドライウォールサンダ1の前部の中央縦断面図である。図8は、図6のB−B線断面図である。図9は、図3のA−A線断面図である。図10は、竿部2が最も短い状態における図1相当図である。
ドライウォールサンダ1は、竿部2と、竿部2の後部(第2端部)に設けられるハンドル部4と、竿部2の前端部(第1端部)において吊枠部6を介して連結されたヘッド部8と、を備えている。
図1は、本発明の実施の第1形態に係るドライウォールサンダ1の左側からみた斜視図である。図2は、ドライウォールサンダ1の右側からみた斜視図である。図3は、ドライウォールサンダ1の右側面図である。図4は、ドライウォールサンダ1の前面図である。図5は、ドライウォールサンダ1の後部前の中央縦断面図である。図6は、ドライウォールサンダ1の後部後の中央縦断面図である。図7は、ドライウォールサンダ1の前部の中央縦断面図である。図8は、図6のB−B線断面図である。図9は、図3のA−A線断面図である。図10は、竿部2が最も短い状態における図1相当図である。
ドライウォールサンダ1は、竿部2と、竿部2の後部(第2端部)に設けられるハンドル部4と、竿部2の前端部(第1端部)において吊枠部6を介して連結されたヘッド部8と、を備えている。
竿部2は、前後に延びており、第1竿体としての大径パイプ10と、その内側にスライド可能に入る第2竿体としての小径パイプ12と、を有している。大径パイプ10と小径パイプ12との一方が他方に対してスライドすることにより、竿部2がテレスコピック機構を有して伸縮自在となる。
小径パイプ12は、円筒状であり、ハンドル部4の外郭であるハンドルハウジング14に取り付けられている。小径パイプ12の前端部には、フランジ筒16が固定されている。フランジ筒16における前部のフランジ部は、小径パイプ12の前端から飛び出して大径パイプ10の内面に接触している。他方、フランジ筒16におけるフランジ部以外の部分の外面は、小径パイプ12の内面と接触している。フランジ筒16におけるフランジ部の径方向内方における孔は、前広がりとなっている。
大径パイプ10は、小径パイプ12が通る円筒状の第1中空部20及びその下部に添うような断面“U”字状の第2中空部22を有する二穴管であり、アルミニウム材の押し出しにより形成されている。大径パイプ10の外面(第1中空部20と第2中空部22とを仕切る仕切り壁の隣接部)には、大径パイプ10の前後方向のスライドの案内を行い、又大径パイプの上下左右方向の位置決めを行うための大径パイプガイド溝23が形成されている。
大径パイプ10の第1中空部20の後端部には、小径パイプ12の外面に接触し又は近接する円筒状のストップリング24が固定されている。又、大径パイプ10の第2中空部22の後端は、第1中空部20の後端より前方に配置されている。第1中空部20の後端部の下方であって、第2中空部22の後端の後側には、断面“U”字状のリード線ガイド26が取り付けられている。
小径パイプ12は、円筒状であり、ハンドル部4の外郭であるハンドルハウジング14に取り付けられている。小径パイプ12の前端部には、フランジ筒16が固定されている。フランジ筒16における前部のフランジ部は、小径パイプ12の前端から飛び出して大径パイプ10の内面に接触している。他方、フランジ筒16におけるフランジ部以外の部分の外面は、小径パイプ12の内面と接触している。フランジ筒16におけるフランジ部の径方向内方における孔は、前広がりとなっている。
大径パイプ10は、小径パイプ12が通る円筒状の第1中空部20及びその下部に添うような断面“U”字状の第2中空部22を有する二穴管であり、アルミニウム材の押し出しにより形成されている。大径パイプ10の外面(第1中空部20と第2中空部22とを仕切る仕切り壁の隣接部)には、大径パイプ10の前後方向のスライドの案内を行い、又大径パイプの上下左右方向の位置決めを行うための大径パイプガイド溝23が形成されている。
大径パイプ10の第1中空部20の後端部には、小径パイプ12の外面に接触し又は近接する円筒状のストップリング24が固定されている。又、大径パイプ10の第2中空部22の後端は、第1中空部20の後端より前方に配置されている。第1中空部20の後端部の下方であって、第2中空部22の後端の後側には、断面“U”字状のリード線ガイド26が取り付けられている。
ハンドルハウジング14は、左右半割であり、左部と右部とが互いに組み合わせられた状態でネジ28によって止められることで形成されている。
ハンドルハウジング14は、前後に延びており竿部2を収める竿収納部30と、その後部の上方に配置された丘状のグリップ基部32と、その後上部から後方に突出した上方視“T”字状のグリップ部34と、竿収納部30の後方に配置されたバッテリ装着部36と、その下前方に配置された、後ろに広がるジョイント保持部38と、を有している。
グリップ部34は、前後方向に延びるグリップ部本体部34aと、その後端部において左右両側に延びる補助グリップ部34bと、を有している。
ジョイント保持部38には、竿収納部30及びバッテリ装着部36の間からバッテリ装着部36の下側までにわたる側面視“S”字状の空間を含む筒状のジョイント40が保持される。ジョイント40は、左右半割であり、左部と右部とが互いに合わせられた状態でネジ41が通されることにより組み合わせられている。ジョイント40の前方に開放された上端部には、小径パイプ12の後端部が接続され、ジョイント40の後方に開放された下端部には、図3及び図6に先端部のみ図示された集塵機の集塵ホース42が接続される(集塵ホース接続部,集塵機接続部)。
ハンドルハウジング14は、前後に延びており竿部2を収める竿収納部30と、その後部の上方に配置された丘状のグリップ基部32と、その後上部から後方に突出した上方視“T”字状のグリップ部34と、竿収納部30の後方に配置されたバッテリ装着部36と、その下前方に配置された、後ろに広がるジョイント保持部38と、を有している。
グリップ部34は、前後方向に延びるグリップ部本体部34aと、その後端部において左右両側に延びる補助グリップ部34bと、を有している。
ジョイント保持部38には、竿収納部30及びバッテリ装着部36の間からバッテリ装着部36の下側までにわたる側面視“S”字状の空間を含む筒状のジョイント40が保持される。ジョイント40は、左右半割であり、左部と右部とが互いに合わせられた状態でネジ41が通されることにより組み合わせられている。ジョイント40の前方に開放された上端部には、小径パイプ12の後端部が接続され、ジョイント40の後方に開放された下端部には、図3及び図6に先端部のみ図示された集塵機の集塵ホース42が接続される(集塵ホース接続部,集塵機接続部)。
竿収納部30の前部は、円筒状に形成されて外部に露出している(図5参照)。竿収納部30の後部の上とグリップ基部32の下との境界には、左右両側から内方へ突出し前後方向に延びる上竿収納部リブ44が立てられている(図6,図8参照)。双方の上竿収納部リブ44は、竿部2の上方に位置しており、それらの先端は、互いに接触している。上竿収納部リブ44の後端部は、断面“7”字状に形成されており、その内方には、小径パイプ12の後端部を保持するバンド46が取り付けられている。バンド46の後上部は、ジョイント40の前上部と接触しあるいは隣接している。又、竿収納部30の下部であって、竿部2の下端部の側方には、左右両側から内方へ突出し前後方向に延びる下竿収納部リブ48が立てられている(図8参照)。双方の下竿収納部リブ48の先端部は、竿部2における対応する大径パイプガイド溝23に入っている。又、下竿収納部リブ48の下方であって、下のネジ28の上側には、竿収納部底部49が配置されている。
竿収納部30の前端部には、外面に形成された第1ネジ溝50を有するネジ溝部52が配置されている。ネジ溝部52の内側には、固定筒54が配置されている。固定筒54の後部の外面は、ネジ溝部52の内面と接触しており、固定筒54の内面は、大径パイプ10の外面に接触している。固定筒54の前部には、他の部分に対して径方向外方に突出するリング状の固定筒突出部56が形成されている。固定筒突出部56は、前部において、後方へと広がる第1テーパ面58を有している。又、ネジ溝部52の外側には、外筒60が配置されている。外筒60の内面には、ネジ溝部52の第1ネジ溝50に入る第2ネジ溝62と、その前方においてリング状に配置された前すぼまりの第2テーパ面64とが形成されている。
使用者により外筒60が前進する方向に回転されると、第2テーパ面64が固定筒54の第1テーパ面58から離れて、固定筒54の大径パイプ10に対する圧接が解除される。この状態では、大径パイプ10が小径パイプ12に対して相対的に前後移動可能であり、竿部2の長さが変更可能である。使用者は、竿部2において所望の長さが得られた状態で、外筒60を後退する方向に回していく。すると、第2テーパ面64が固定筒54の第1テーパ面58に接触して固定筒54を径方向内方に押すようになり、固定筒54はその内方の大径パイプ10に圧接して、大径パイプ10を固定する。このように、外筒60と固定筒54と(ネジ溝部52と)により、竿部2が任意の伸縮位置で固定可能とされている。
竿部2が短くなる場合、大径パイプ10はハンドルハウジング14(竿収納部30)と小径パイプ12との間を通過する。
竿部2が最も長い状態である場合、大径パイプ10のストップリング24が小径パイプ12のフランジ筒16のフランジ部に当たる。このとき、大径パイプ10の後端部は、外筒60の内方に位置する。
他方、竿部2が最も短い状態である場合(図10)、大径パイプ10の後端が上竿収納部リブ44の後端部に当たる。このとき、吊枠部6が、外筒60の前側に位置する。
竿収納部30の前端部には、外面に形成された第1ネジ溝50を有するネジ溝部52が配置されている。ネジ溝部52の内側には、固定筒54が配置されている。固定筒54の後部の外面は、ネジ溝部52の内面と接触しており、固定筒54の内面は、大径パイプ10の外面に接触している。固定筒54の前部には、他の部分に対して径方向外方に突出するリング状の固定筒突出部56が形成されている。固定筒突出部56は、前部において、後方へと広がる第1テーパ面58を有している。又、ネジ溝部52の外側には、外筒60が配置されている。外筒60の内面には、ネジ溝部52の第1ネジ溝50に入る第2ネジ溝62と、その前方においてリング状に配置された前すぼまりの第2テーパ面64とが形成されている。
使用者により外筒60が前進する方向に回転されると、第2テーパ面64が固定筒54の第1テーパ面58から離れて、固定筒54の大径パイプ10に対する圧接が解除される。この状態では、大径パイプ10が小径パイプ12に対して相対的に前後移動可能であり、竿部2の長さが変更可能である。使用者は、竿部2において所望の長さが得られた状態で、外筒60を後退する方向に回していく。すると、第2テーパ面64が固定筒54の第1テーパ面58に接触して固定筒54を径方向内方に押すようになり、固定筒54はその内方の大径パイプ10に圧接して、大径パイプ10を固定する。このように、外筒60と固定筒54と(ネジ溝部52と)により、竿部2が任意の伸縮位置で固定可能とされている。
竿部2が短くなる場合、大径パイプ10はハンドルハウジング14(竿収納部30)と小径パイプ12との間を通過する。
竿部2が最も長い状態である場合、大径パイプ10のストップリング24が小径パイプ12のフランジ筒16のフランジ部に当たる。このとき、大径パイプ10の後端部は、外筒60の内方に位置する。
他方、竿部2が最も短い状態である場合(図10)、大径パイプ10の後端が上竿収納部リブ44の後端部に当たる。このとき、吊枠部6が、外筒60の前側に位置する。
ハンドル部4は、上述のハンドルハウジング14及びジョイント40と、ハンドルハウジング14のバッテリ装着部36に保持されたターミナル基板70と、グリップ部34の前端部内に保持されたスイッチ72と、その下方において後部が露出するように配置された前後に延びるトリガ74と、その上側に配置されたロックオン部材76と、トリガ74の前側に配置されたトリガロック部材78と、グリップ基部32の上部に保持された速度調節ダイヤル80と、グリップ基部32の前部に保持されたコントローラ82と、グリップ基部32内に形成された無線通信アダプタ挿入部84と、を備えている。
ターミナル基板70には、充電器(図示略)により充電可能である、電力供給源としての直方体(四角柱)状のバッテリ86を装着可能である。
ターミナル基板70は、それぞれ後方へ突出し左右方向に延びる、一対の電源端子88と、通信端子90と、を有している。
他方、バッテリ86は、これらに対応するように配置されたバッテリ電源端子92及びバッテリ通信端子94が設けられている。バッテリ電源端子92及びバッテリ通信端子94は、バッテリ86の最長辺Jと同様な方向に形成された端子溝内に配置されている。
又、バッテリ86は、取り外しの際に使用するバッテリボタン95を有している。バッテリボタン95は、バッテリ装着部36に係止可能な図示されないバッテリ爪と一体であり、当該バッテリ爪が外方に突出している状態から内部へ退く状態となるまでスライド可能であり、当該バッテリ爪が突出している状態となるよう図示されない弾性体により付勢されている。
バッテリ86は、その最長辺Jが左右方向を向き、バッテリボタン95が右側となる状態で、バッテリ装着部36の右側から左方へスライドされることにより、バッテリ装着部36に装着される。このとき、突出したバッテリ爪がバッテリ装着部36に係止する。又、電源端子88は、バッテリ電源端子92に接続される。更に、通信端子90は、バッテリ通信端子94に接続される。
又、装着されたバッテリ86は、バッテリボタン95が後方にスライド操作されてバッテリ装着部36に対する係止が解かれた状態で右方へスライドされることにより、取り外される。
バッテリ86は、18V出力のリチウムイオンバッテリであり、他の電動工具等においても用いることができる汎用的なものである。
ターミナル基板70は、それぞれ後方へ突出し左右方向に延びる、一対の電源端子88と、通信端子90と、を有している。
他方、バッテリ86は、これらに対応するように配置されたバッテリ電源端子92及びバッテリ通信端子94が設けられている。バッテリ電源端子92及びバッテリ通信端子94は、バッテリ86の最長辺Jと同様な方向に形成された端子溝内に配置されている。
又、バッテリ86は、取り外しの際に使用するバッテリボタン95を有している。バッテリボタン95は、バッテリ装着部36に係止可能な図示されないバッテリ爪と一体であり、当該バッテリ爪が外方に突出している状態から内部へ退く状態となるまでスライド可能であり、当該バッテリ爪が突出している状態となるよう図示されない弾性体により付勢されている。
バッテリ86は、その最長辺Jが左右方向を向き、バッテリボタン95が右側となる状態で、バッテリ装着部36の右側から左方へスライドされることにより、バッテリ装着部36に装着される。このとき、突出したバッテリ爪がバッテリ装着部36に係止する。又、電源端子88は、バッテリ電源端子92に接続される。更に、通信端子90は、バッテリ通信端子94に接続される。
又、装着されたバッテリ86は、バッテリボタン95が後方にスライド操作されてバッテリ装着部36に対する係止が解かれた状態で右方へスライドされることにより、取り外される。
バッテリ86は、18V出力のリチウムイオンバッテリであり、他の電動工具等においても用いることができる汎用的なものである。
スイッチ72は、スイッチ本体部96にプランジャ97が弾性力により復帰可能に入ることで切替状態が変化するものであり、プランジャ97が下側となるように設置されている。プランジャ97が(遊びを超えて)スイッチ本体部96に入ると、スイッチ72の切替状態がオフからオンになる。
トリガ74は、中央のトリガ軸部98に設けられた左右方向の軸(図示略)がハンドルハウジング14に支えられることで、揺動可能とされている。トリガ74の上面とハンドルハウジング14との間には、スプリング99が渡されている。トリガ74の上面後部は、スプリング99が自然長あるいはこれに近い伸長状態である場合、スイッチ72のプランジャ97に隣接しており、トリガ74が上方に引かれると、スプリング99が圧縮状態となり、トリガ74の上面後部がプランジャ97に接触してプランジャ97を押す。
ロックオン部材76は、左右方向に延び、左右各端部がロックオンボタン100として露出する状態で設けられている。使用者がトリガ74を引いた状態で左右何れかのロックオンボタン100を押す(オンにする)と、移動したロックオン部材76がトリガ74の中央部に掛かり、引きを止めた場合に下方に戻ろうとするトリガ74を食い止めて引き状態に維持する。よって、ロックオンボタン100のオン操作時、スイッチ72はオンに維持される。使用者がトリガ74を更に上方に引くと、ロックオン部材76は元の位置に戻り、トリガ74の引き状態の維持が解除されるので、スイッチ72のオン状態の維持が解かれる。
トリガロック部材78は、左右方向に延び、左右両端部がトリガロックボタン101として露出する状態で設けられている。使用者がトリガ74を引かない状態で左のトリガロックボタン101を押す(オンにする)と、トリガ74の前端部にトリガロック部材78が掛かり、引かれることで後部が上昇(前部が下降)しようとするトリガ74を食い止めて、トリガ74の引き操作が規制される。他方、使用者が右のトリガロックボタン101を押す(オフにする)と、左方に復帰したトリガロックボタン101はトリガ74の引き操作の規制を解除する。
速度調節ダイヤル80は、円盤状のダイヤル部102における曲面の上部が露出するように設けられている。使用者は、ダイヤル部102の操作により、速度調節ダイヤル80の切替状態を変更可能である。速度調節ダイヤル80の切替状態は、速度設定に対応する。
トリガ74は、中央のトリガ軸部98に設けられた左右方向の軸(図示略)がハンドルハウジング14に支えられることで、揺動可能とされている。トリガ74の上面とハンドルハウジング14との間には、スプリング99が渡されている。トリガ74の上面後部は、スプリング99が自然長あるいはこれに近い伸長状態である場合、スイッチ72のプランジャ97に隣接しており、トリガ74が上方に引かれると、スプリング99が圧縮状態となり、トリガ74の上面後部がプランジャ97に接触してプランジャ97を押す。
ロックオン部材76は、左右方向に延び、左右各端部がロックオンボタン100として露出する状態で設けられている。使用者がトリガ74を引いた状態で左右何れかのロックオンボタン100を押す(オンにする)と、移動したロックオン部材76がトリガ74の中央部に掛かり、引きを止めた場合に下方に戻ろうとするトリガ74を食い止めて引き状態に維持する。よって、ロックオンボタン100のオン操作時、スイッチ72はオンに維持される。使用者がトリガ74を更に上方に引くと、ロックオン部材76は元の位置に戻り、トリガ74の引き状態の維持が解除されるので、スイッチ72のオン状態の維持が解かれる。
トリガロック部材78は、左右方向に延び、左右両端部がトリガロックボタン101として露出する状態で設けられている。使用者がトリガ74を引かない状態で左のトリガロックボタン101を押す(オンにする)と、トリガ74の前端部にトリガロック部材78が掛かり、引かれることで後部が上昇(前部が下降)しようとするトリガ74を食い止めて、トリガ74の引き操作が規制される。他方、使用者が右のトリガロックボタン101を押す(オフにする)と、左方に復帰したトリガロックボタン101はトリガ74の引き操作の規制を解除する。
速度調節ダイヤル80は、円盤状のダイヤル部102における曲面の上部が露出するように設けられている。使用者は、ダイヤル部102の操作により、速度調節ダイヤル80の切替状態を変更可能である。速度調節ダイヤル80の切替状態は、速度設定に対応する。
コントローラ82は、上方に開いた開蓋箱状のコントローラケース104と、その上部において保持された制御回路基板106と、を備えている。
コントローラ82は、上竿収納部リブ44と一体に形成された、断面“J”字状の前方の第1リブ108と断面逆“J”字状の後方の第2リブ110とにより保持される。上竿収納部リブ44における第2リブ110の後方の部分には、配線用スリット112が設けられている。又、ハンドルハウジング14の左内壁における上竿収納部リブ44の前端部の下方から配線用スリット112にかけての部分には、側面視“C”字状の配線用溝114が形成されている。更に、ハンドルハウジング14におけるコントローラ82の両側方の部分には、スリット状の通気孔116が形成されている。
制御回路基板106は、バッテリ装着部36のターミナル基板70(通信端子90)と、スイッチ72と、速度調節ダイヤル80とに対して、図示されないリード線により電気的に接続されている。
又、制御回路基板106は、表示部118を搭載しており、表示部118の上部(4個のLEDを含む)は、ハンドルハウジング14上面から露出している。制御回路基板106は、表示部118において、ターミナル基板70に接続されたバッテリ86の残量及びモータ負荷の大小を表示する。
更に、制御回路基板106には、ヘッド部8へ延びる竿部リード線120が接続されている。竿部リード線120は、複数の単リード線の束であり(図9参照)、その単リード線の一部(制御リード線)が制御回路基板106に接続されている。単リード線の別の一部(電源リード線)は、ターミナル基板70(電源端子88)に接続されている。即ち、竿部リード線120は、ハンドル部4に連結されている。竿部リード線120は、配線用スリット112の手前で一本化し、配線用スリット112及び配線用溝114を通過して、双方の下竿収納部リブ48及び小径パイプ12の下部と、竿収納部底部49との間の空間であるリード線収納部Pに入り、一旦後方に向かった後でUターンして(たわんで)前方に向かい、リード線ガイド26を介して大径パイプ10の第2中空部22(リード線収容スペース)に入る。尚、竿部リード線120の後端部(制御リード線と電源リード線との分岐)の図示は省略されている。
リード線収納部Pには、竿部リード線120の後部が収納される。リード線収納部Pは、竿収納部30及び竿部2(小径パイプ12)の径方向外方(下方)に配置されている。リード線収納部Pは、後端部において、ジョイント40の前壁の一部である壁部Qを有している。壁部Qは、竿部2が最も短い収縮状態となって大径パイプ10が竿収納部30に完全に収納された場合の、大径パイプ10の後端より後方に離れて配置されている。又、リード線収納部Pの幅(左右方向の大きさ)は、竿部2(大径パイプ10)の太さ(直径)より大きくなっている。
コントローラ82は、上竿収納部リブ44と一体に形成された、断面“J”字状の前方の第1リブ108と断面逆“J”字状の後方の第2リブ110とにより保持される。上竿収納部リブ44における第2リブ110の後方の部分には、配線用スリット112が設けられている。又、ハンドルハウジング14の左内壁における上竿収納部リブ44の前端部の下方から配線用スリット112にかけての部分には、側面視“C”字状の配線用溝114が形成されている。更に、ハンドルハウジング14におけるコントローラ82の両側方の部分には、スリット状の通気孔116が形成されている。
制御回路基板106は、バッテリ装着部36のターミナル基板70(通信端子90)と、スイッチ72と、速度調節ダイヤル80とに対して、図示されないリード線により電気的に接続されている。
又、制御回路基板106は、表示部118を搭載しており、表示部118の上部(4個のLEDを含む)は、ハンドルハウジング14上面から露出している。制御回路基板106は、表示部118において、ターミナル基板70に接続されたバッテリ86の残量及びモータ負荷の大小を表示する。
更に、制御回路基板106には、ヘッド部8へ延びる竿部リード線120が接続されている。竿部リード線120は、複数の単リード線の束であり(図9参照)、その単リード線の一部(制御リード線)が制御回路基板106に接続されている。単リード線の別の一部(電源リード線)は、ターミナル基板70(電源端子88)に接続されている。即ち、竿部リード線120は、ハンドル部4に連結されている。竿部リード線120は、配線用スリット112の手前で一本化し、配線用スリット112及び配線用溝114を通過して、双方の下竿収納部リブ48及び小径パイプ12の下部と、竿収納部底部49との間の空間であるリード線収納部Pに入り、一旦後方に向かった後でUターンして(たわんで)前方に向かい、リード線ガイド26を介して大径パイプ10の第2中空部22(リード線収容スペース)に入る。尚、竿部リード線120の後端部(制御リード線と電源リード線との分岐)の図示は省略されている。
リード線収納部Pには、竿部リード線120の後部が収納される。リード線収納部Pは、竿収納部30及び竿部2(小径パイプ12)の径方向外方(下方)に配置されている。リード線収納部Pは、後端部において、ジョイント40の前壁の一部である壁部Qを有している。壁部Qは、竿部2が最も短い収縮状態となって大径パイプ10が竿収納部30に完全に収納された場合の、大径パイプ10の後端より後方に離れて配置されている。又、リード線収納部Pの幅(左右方向の大きさ)は、竿部2(大径パイプ10)の太さ(直径)より大きくなっている。
無線通信アダプタ挿入部84は、ハンドルハウジング14右部の外面から内方へ箱状に凹むように形成されており、無線通信アダプタ122(図3にのみ図示)を差し込み可能である。差し込んだ場合、無線通信アダプタ122は、コントローラ82の制御回路基板106に搭載された無線通信用コントローラ(図示略)と電気的に接続される。
無線通信アダプタ122は、他の付帯設備としての上述の集塵機との間で無線通信を行う。無線通信によって、集塵機の起動動作,停止動作が、ドライウォールサンダ1の起動動作,停止動作と連動する。
予め、無線通信アダプタ122と、集塵機に取り付けられた集塵機側無線通信アダプタとの間において、無線通信可能とするための関連付け(ペアリング)が行われる。ペアリングは、使用者が、集塵機側無線通信アダプタのボタンを押し、所定時間内に無線通信アダプタ122のボタン(図示略)を操作することでなされる。
ペアリングが完了した状態でスイッチ72がオンとなりドライウォールサンダ1が起動すると、その起動を示す起動情報が無線通信アダプタ122から集塵機に送信され、集塵機側無線通信アダプタによる当該起動情報の受信に基づいて集塵機が自動的に起動する。無線通信状態は、無線通信アダプタ122に設けられたランプの点灯状態によって、使用者に知らされる。
無線通信アダプタ122は、他の付帯設備としての上述の集塵機との間で無線通信を行う。無線通信によって、集塵機の起動動作,停止動作が、ドライウォールサンダ1の起動動作,停止動作と連動する。
予め、無線通信アダプタ122と、集塵機に取り付けられた集塵機側無線通信アダプタとの間において、無線通信可能とするための関連付け(ペアリング)が行われる。ペアリングは、使用者が、集塵機側無線通信アダプタのボタンを押し、所定時間内に無線通信アダプタ122のボタン(図示略)を操作することでなされる。
ペアリングが完了した状態でスイッチ72がオンとなりドライウォールサンダ1が起動すると、その起動を示す起動情報が無線通信アダプタ122から集塵機に送信され、集塵機側無線通信アダプタによる当該起動情報の受信に基づいて集塵機が自動的に起動する。無線通信状態は、無線通信アダプタ122に設けられたランプの点灯状態によって、使用者に知らされる。
吊枠部6は、大径パイプ10の先端部に取り付けられた左右二股の外枠124と、その先端部内において左右方向の軸周りに回転可能に接続された上面視矩形状の内枠126と、を備えている。
内枠126は、前面視及び後面視で共に“V”字状であり、それらの各最下部に挟まれるようにヘッド部8が配置される。ヘッド部8は、内枠126に、前後方向の軸の周りで回転可能に接続されている。
ヘッド部8は、吊枠部6によって、左右方向及び前後方向の合計2軸の周りで姿勢の変化が可能となっている。ヘッド部8は、比較的に大きな外枠124によって、主に左右方向の軸の周りで姿勢変化し、比較的に小さな内枠126によって、補助的に前後方向の軸の周りで姿勢変化する。
内枠126は、前面視及び後面視で共に“V”字状であり、それらの各最下部に挟まれるようにヘッド部8が配置される。ヘッド部8は、内枠126に、前後方向の軸の周りで回転可能に接続されている。
ヘッド部8は、吊枠部6によって、左右方向及び前後方向の合計2軸の周りで姿勢の変化が可能となっている。ヘッド部8は、比較的に大きな外枠124によって、主に左右方向の軸の周りで姿勢変化し、比較的に小さな内枠126によって、補助的に前後方向の軸の周りで姿勢変化する。
ヘッド部8は、釣鐘状のヘッド部外側ハウジング130と、その内方に配置されたモータハウジング132と、その下方に取り付けられた、上部が筒状で下部が円盤状であるギヤハウジング134と、その下端部の外側に装着されたリング状のバンパー136と、モータハウジング132に保持された駆動源としての電動モータ138と、ギヤハウジング134の上部に保持された遊星歯車機構140と、ギヤハウジング134の下部に配置されたスピンドル142と、スピンドル142に対しネジ144により取り付けられており、上部がバンパー136内に配置されている円盤状のパッド146と、を備えている。
尚、ヘッド部外側ハウジング130と、モータハウジング132と、ギヤハウジング134と、により、ヘッド部ハウジング147が構成される。
尚、ヘッド部外側ハウジング130と、モータハウジング132と、ギヤハウジング134と、により、ヘッド部ハウジング147が構成される。
ヘッド部外側ハウジング130の前後には、ボス部148が形成されている。各ボス部148には、吊枠部6(内枠126)が、ボルト150を介して相対的に回転可能に接続されている。
ヘッド部外側ハウジング130の前上部には、他の部分より上方に円筒状に突出した第1ホース接続部152が形成されている。第1ホース接続部152には、大径パイプ10の第1中空部20と連通する状態で吊枠部6の後上部に接続された第1ホース154の前端部が接続される。第1ホース154は、側面視で逆“U”字状の形状を維持するように取り回されている。
ヘッド部外側ハウジング130の後のボス部148の下方には、開口部が開けられている。
ヘッド部外側ハウジング130の前上部には、他の部分より上方に円筒状に突出した第1ホース接続部152が形成されている。第1ホース接続部152には、大径パイプ10の第1中空部20と連通する状態で吊枠部6の後上部に接続された第1ホース154の前端部が接続される。第1ホース154は、側面視で逆“U”字状の形状を維持するように取り回されている。
ヘッド部外側ハウジング130の後のボス部148の下方には、開口部が開けられている。
モータハウジング132は、左右半割であり、複数(7個)のネジ156によって組み合わせられている。
モータハウジング132は、円筒状のモータハウジング本体部158と、その後部から後方及び下方へ側面視“J”字状に突出した筒状部160と、を有する。
筒状部160は、ヘッド部外側ハウジング130の後の開口部から外に出ている。
筒状部160の後上端部には、大径パイプ10の第2中空部22と連通する状態で吊枠部6の後下部に接続された第2ホース162の前端部が接続される。第2ホース162は、側面視で逆“J”字状の形状を維持するように取り回されている。大径パイプ10の第2中空部22、第2ホース162及び筒状部160の内部において、ハンドル部4のコントローラ82から出て竿部2を通過する竿部リード線120の前部が配置されている。竿部リード線120における筒状部160に配置された部分には、着脱によって接続及び切り離しが自在である一対(雄雌)のコネクタ164が介装されている。
モータハウジング132は、円筒状のモータハウジング本体部158と、その後部から後方及び下方へ側面視“J”字状に突出した筒状部160と、を有する。
筒状部160は、ヘッド部外側ハウジング130の後の開口部から外に出ている。
筒状部160の後上端部には、大径パイプ10の第2中空部22と連通する状態で吊枠部6の後下部に接続された第2ホース162の前端部が接続される。第2ホース162は、側面視で逆“J”字状の形状を維持するように取り回されている。大径パイプ10の第2中空部22、第2ホース162及び筒状部160の内部において、ハンドル部4のコントローラ82から出て竿部2を通過する竿部リード線120の前部が配置されている。竿部リード線120における筒状部160に配置された部分には、着脱によって接続及び切り離しが自在である一対(雄雌)のコネクタ164が介装されている。
ギヤハウジング134上端部の開口部には、モータハウジング本体部158の下端部が嵌まっている。ギヤハウジング134は、その下部の上面辺縁がヘッド部外側ハウジング130下端部の開口部に入り込むことで、モータハウジング132と共にヘッド部外側ハウジング130に取り付けられている。
電動モータ138は、DC駆動のブラシレスモータであり、モータハウジング本体部158の上部内に保持されている。
電動モータ138は、ステータ166及びロータ168を備えている。電動モータ138は、コントローラ82により制御される。
電動モータ138は、ステータ166及びロータ168を備えている。電動モータ138は、コントローラ82により制御される。
ステータ166は、固定子鉄心170と、固定子鉄心170の前後に設けられる上絶縁部材172及び下絶縁部材174と、上絶縁部材172及び下絶縁部材174を介して固定子鉄心170にそれぞれ巻かれる複数(ここでは6個)の駆動コイル176と、駆動コイル176同士を所定の接続態様で短絡すると共に竿部リード線120(電源リード線)と電気的に接続されるリング状の短絡部材177と、を有する。上絶縁部材172には、センサ回路基板178が固定されている。
ステータ166の内部には、ロータ168が配置されている(インナーロータ型)。ロータ168は、回転駆動軸としてのモータ軸180と、モータ軸180の周囲に配置された筒状の回転子鉄心182と、回転子鉄心182の内部に配置されており、複数(4個)の上下に延びる板状で周方向に極性を交互に変えて並べた永久磁石184と、これらの上側(センサ回路基板178側)において放射状に配置された複数のセンサ用永久磁石(図示略)を有する。モータ軸180の下端部には、ピニオン185が装着されている。回転子鉄心182と、永久磁石184と、センサ用永久磁石は、ロータアッセンブリを構成する。
センサ回路基板178には、センサ用永久磁石によってロータ168(モータ軸180)の回転角(回転位置)を検出する図示されないセンサ(回転検出素子)が複数(3個)搭載されている。センサ回路基板178は、筒状部160からモータハウジング本体部158内に入った竿部リード線120(信号リード線)によって、コントローラ82と電気的に接続されている。コントローラ82(制御回路基板106)は、6個のスイッチング素子(図示略)を有している。各スイッチング素子は、何れかの駆動コイル176と対応して設けられ、対応する駆動コイル176のスイッチングを行う。尚、コントローラ82(制御回路基板106)は、図示されないマイコンを有しており、当該マイコンは、上記スイッチング素子のスイッチングを制御する。制御回路基板106は、電動モータ138を制御する各種の素子を搭載している。
センサ回路基板178の上側には、モータ軸180を回転可能に支持する上軸受192が設けられている。上軸受192は、モータハウジング132に保持されている。
ピニオン185の上側には、モータ軸180を回転可能に支持する下軸受194が設けられている。下軸受194は、モータハウジング132の下中央部において固定されている。
モータ軸180の下軸受194と回転子鉄心182の間には、冷却用のファン196が配置されている。ファン196は、モータ軸180に対して固定されており、回転により、遠心方向に風を送り出す(遠心ファン)。ファン196は、モータハウジング132の中央部内に配置されており、モータハウジング132の左右の中央部には、内排気口(図示略)が形成され、ヘッド部外側ハウジング130の左右の中央部であって各内排気口の外側には、外排気口198が形成されている。内排気口及び外排気口198は、ファン196の放射方向外方に位置しており、ファン196の風は、効率的に排出される。
他方、モータハウジング132の筒状部160の下部には、吸気口199(図7)が形成されている。
センサ回路基板178には、センサ用永久磁石によってロータ168(モータ軸180)の回転角(回転位置)を検出する図示されないセンサ(回転検出素子)が複数(3個)搭載されている。センサ回路基板178は、筒状部160からモータハウジング本体部158内に入った竿部リード線120(信号リード線)によって、コントローラ82と電気的に接続されている。コントローラ82(制御回路基板106)は、6個のスイッチング素子(図示略)を有している。各スイッチング素子は、何れかの駆動コイル176と対応して設けられ、対応する駆動コイル176のスイッチングを行う。尚、コントローラ82(制御回路基板106)は、図示されないマイコンを有しており、当該マイコンは、上記スイッチング素子のスイッチングを制御する。制御回路基板106は、電動モータ138を制御する各種の素子を搭載している。
センサ回路基板178の上側には、モータ軸180を回転可能に支持する上軸受192が設けられている。上軸受192は、モータハウジング132に保持されている。
ピニオン185の上側には、モータ軸180を回転可能に支持する下軸受194が設けられている。下軸受194は、モータハウジング132の下中央部において固定されている。
モータ軸180の下軸受194と回転子鉄心182の間には、冷却用のファン196が配置されている。ファン196は、モータ軸180に対して固定されており、回転により、遠心方向に風を送り出す(遠心ファン)。ファン196は、モータハウジング132の中央部内に配置されており、モータハウジング132の左右の中央部には、内排気口(図示略)が形成され、ヘッド部外側ハウジング130の左右の中央部であって各内排気口の外側には、外排気口198が形成されている。内排気口及び外排気口198は、ファン196の放射方向外方に位置しており、ファン196の風は、効率的に排出される。
他方、モータハウジング132の筒状部160の下部には、吸気口199(図7)が形成されている。
遊星歯車機構140は、ギヤハウジング134を外郭とし、それぞれ上下方向の機軸(モータ軸180の中心軸及びスピンドル142の中心軸が含まれる)を中心に配置された2段の遊星歯車列を有していて、モータ軸180の回転を減速してスピンドル142に伝える。即ち、遊星歯車機構140は、上遊星歯車列200(1段目の減速機構)と、下遊星歯車列210(2段目の減速機構)と、上遊星歯車列200及び下遊星歯車列210に共通するインターナルギヤ220と、を有する。
上遊星歯車列200は、ピニオン185及びインターナルギヤ220にそれぞれ噛み合う複数(3個)の遊星ギヤ202と、全遊星ギヤ202についてそれぞれピン203を介して回転可能に支持する1個のキャリア204と、を有する。
下遊星歯車列210は、1段目のキャリア204の縮径した下部(サンギヤ部)及びインターナルギヤ220にそれぞれ噛み合う複数(3個)の遊星ギヤ212と、それらのピン213及びキャリア214と、を有する。
上遊星歯車列200は、ピニオン185及びインターナルギヤ220にそれぞれ噛み合う複数(3個)の遊星ギヤ202と、全遊星ギヤ202についてそれぞれピン203を介して回転可能に支持する1個のキャリア204と、を有する。
下遊星歯車列210は、1段目のキャリア204の縮径した下部(サンギヤ部)及びインターナルギヤ220にそれぞれ噛み合う複数(3個)の遊星ギヤ212と、それらのピン213及びキャリア214と、を有する。
キャリア214の中央部には、スピンドル142の後端部が取り付けられている。
スピンドル142は、スピンドル上軸受222及びスピンドル下軸受224により、回転可能に支持されている。スピンドル上軸受222及びスピンドル下軸受224は、ギヤハウジング134に保持されている。
スピンドル142は、スピンドル上軸受222及びスピンドル下軸受224により、回転可能に支持されている。スピンドル上軸受222及びスピンドル下軸受224は、ギヤハウジング134に保持されている。
パッド146は、モータハウジング132の下方に配置されている。
パッド146の下面には、サンドペーパーを始めとする先端工具(図示略)が装着される。パッド146の下面は、先端工具を介した接触により被加工材に研磨を施す研磨面となっている。
パッド146は、中心を同じくする仮想的な円に沿って並ぶように、上下方向のパッド孔230を複数有している。これらのパッド孔230は、周方向で等間隔に並んでいる。先端工具は、パッド孔230と同様の先端工具孔を有している。
又、ギヤハウジング134の前下部には、上下方向のギヤハウジング孔232が形成されている。ギヤハウジング孔232の上方には、ヘッド部外側ハウジング130前部とモータハウジング132前部との間の空間が位置しており、更に上方には、第1ホース接続部152が位置している。
パッド146の下面には、サンドペーパーを始めとする先端工具(図示略)が装着される。パッド146の下面は、先端工具を介した接触により被加工材に研磨を施す研磨面となっている。
パッド146は、中心を同じくする仮想的な円に沿って並ぶように、上下方向のパッド孔230を複数有している。これらのパッド孔230は、周方向で等間隔に並んでいる。先端工具は、パッド孔230と同様の先端工具孔を有している。
又、ギヤハウジング134の前下部には、上下方向のギヤハウジング孔232が形成されている。ギヤハウジング孔232の上方には、ヘッド部外側ハウジング130前部とモータハウジング132前部との間の空間が位置しており、更に上方には、第1ホース接続部152が位置している。
かようなドライウォールサンダ1では、バッテリ装着部36に装着されたバッテリ86の最長辺Jの方向は、主に図6,図10に示されるように、竿部2の中心軸M(仮想的なもので、前後方向を向き、竿部2から出る部分を含む)と、中心軸Mに直交し且つパッド146の研磨面に平行な第1仮想直線L(左右方向)とに直交する第2仮想直線K(上下方向)に対して角度を有している。より詳細には、バッテリ86の最長辺Jの方向は、第2仮想直線Kに対して90°の角度を有していて、左右方向を向いている。
パッド146の研磨面の向きは、吊枠部6によるヘッド部8の姿勢変化により変化する。ヘッド部8の竿部2に対する姿勢は、被加工材への接触がなければ、ヘッド部8に作用する重力により定まり、左右方向の軸が水平であれば、内枠126が水平になり、パッド146の研磨面も水平になる。ヘッド部8の姿勢変化は、主に左右方向の軸の周りである。よって、第1仮想直線Lが定められるに当たり、補助的な前後方向の軸の周りでのヘッド部8の姿勢変化は考慮されなくても良い。すると、パッド146の研磨面の向きがどのようなものであっても、パッド146の研磨面に平行な第1仮想直線Lは、左右方向となる。
パッド146の研磨面の向きは、吊枠部6によるヘッド部8の姿勢変化により変化する。ヘッド部8の竿部2に対する姿勢は、被加工材への接触がなければ、ヘッド部8に作用する重力により定まり、左右方向の軸が水平であれば、内枠126が水平になり、パッド146の研磨面も水平になる。ヘッド部8の姿勢変化は、主に左右方向の軸の周りである。よって、第1仮想直線Lが定められるに当たり、補助的な前後方向の軸の周りでのヘッド部8の姿勢変化は考慮されなくても良い。すると、パッド146の研磨面の向きがどのようなものであっても、パッド146の研磨面に平行な第1仮想直線Lは、左右方向となる。
又、装着されたバッテリ86は、竿部2の中心軸Mと交わっており、より詳しくは、バッテリ86における上下方向の中央において交わっている。
更に、バッテリ装着部36に装着されたバッテリ86における第2仮想直線Kの方向(上下方向)の中心は、竿部2の中心軸Mと、左方あるいは右方からみてオーバーラップしており、第1仮想直線Lの方向(左右方向)において重なっている。
加えて、装着されたバッテリ86は、上下方向において、上方のグリップ部34と下方のジョイント40との間に配置されている。
更に、バッテリ装着部36に装着されたバッテリ86における第2仮想直線Kの方向(上下方向)の中心は、竿部2の中心軸Mと、左方あるいは右方からみてオーバーラップしており、第1仮想直線Lの方向(左右方向)において重なっている。
加えて、装着されたバッテリ86は、上下方向において、上方のグリップ部34と下方のジョイント40との間に配置されている。
このようなドライウォールサンダ1は、例えば次のように動作する。
即ち、使用者は、充電されたバッテリ86を、最長辺Jが左右方向を向いた状態で、バッテリ装着部36の右側から左方へスライドすることにより、バッテリ装着部36に装着する。装着されたバッテリ86の最長辺Jは、第2仮想直線Kに直交する方向である左右方向を向く。
又、使用者は、外筒60を緩めて竿部2の伸縮状態を変更し、竿部2を所望の長さにした状態で外筒60を締めることで、竿部2の長さを調節する。
即ち、使用者は、充電されたバッテリ86を、最長辺Jが左右方向を向いた状態で、バッテリ装着部36の右側から左方へスライドすることにより、バッテリ装着部36に装着する。装着されたバッテリ86の最長辺Jは、第2仮想直線Kに直交する方向である左右方向を向く。
又、使用者は、外筒60を緩めて竿部2の伸縮状態を変更し、竿部2を所望の長さにした状態で外筒60を締めることで、竿部2の長さを調節する。
そして、トリガロック部材78がオフである状態で使用者がトリガ74を引くと、スイッチ72がオンとなり、コントローラ82の制御回路基板106により、バッテリ86の電力が、バッテリ電源端子92及び電源端子88並びに竿部リード線120(電源リード線)を介して電動モータ138に供給され、モータ軸180が回転駆動される。よって、トリガ74は、スイッチ72を介して電動モータ138のオンオフを切替えるものであり、電動モータ138のオンオフを操作するスイッチ操作部であって、トリガ74及びスイッチ72は電動モータ138のメインスイッチを構成する。
センサ回路基板178の磁気センサにより把握されたロータ168の回転位置に応じ、コントローラ82(制御回路基板106)のスイッチング素子が各駆動コイル176のスイッチングを行って、ロータ168(モータ軸180)が回転する。
制御回路基板106は、電動モータ138の制御により熱を発する場合があり、その熱は、コントローラケース104に伝わって放散され、又通気孔116から自然対流により導入された外気によって冷却される。
センサ回路基板178の磁気センサにより把握されたロータ168の回転位置に応じ、コントローラ82(制御回路基板106)のスイッチング素子が各駆動コイル176のスイッチングを行って、ロータ168(モータ軸180)が回転する。
制御回路基板106は、電動モータ138の制御により熱を発する場合があり、その熱は、コントローラケース104に伝わって放散され、又通気孔116から自然対流により導入された外気によって冷却される。
モータ軸180の回転力は、遊星歯車機構140により減速されてスピンドル142に伝わり、スピンドル142先端のパッド146が運動(回転)する。
かように運動するパッド146が、グリップ部34及び竿部2の把持により、被加工材に対し押し付けられるようにし又移動されるようにすることで、被加工材の表面に研磨等の加工が施される。
被加工材は、例えば建築物の壁あるいは天井に張られるドライウォール(石膏ボード)であり、より詳しくはドライウォールの施工時においてネジ孔及び継ぎ目を埋めるために用いられるパテである。ドライウォールにおける他の部分から出たパテが、研磨により平坦にされる。
壁の低い位置を研磨する場合、使用者は、竿部2を使用者の左右方向に向け、パッド146を使用者から離れた側で壁に向けた状態で、使用者からみて上下方向となった補助グリップ部34bと、大径パイプ10又は竿収納部30前部とを持つ。
壁の高い位置あるいは天井を研磨する場合、使用者は、竿部2を使用者の上下方向に向け、パッド146を使用者から離れた側で壁又は天井に向けた状態で、グリップ部34(使用者の上下方向となったグリップ部本体部34a又は使用者の左右方向となった補助グリップ部34b)と、大径パイプ10又は竿収納部30前部とを持つ。
いずれの場合においても、吊枠部6により、竿部2に対するヘッド部8の向き即ちパッド146の向きが所定の範囲内において調整される。
かように運動するパッド146が、グリップ部34及び竿部2の把持により、被加工材に対し押し付けられるようにし又移動されるようにすることで、被加工材の表面に研磨等の加工が施される。
被加工材は、例えば建築物の壁あるいは天井に張られるドライウォール(石膏ボード)であり、より詳しくはドライウォールの施工時においてネジ孔及び継ぎ目を埋めるために用いられるパテである。ドライウォールにおける他の部分から出たパテが、研磨により平坦にされる。
壁の低い位置を研磨する場合、使用者は、竿部2を使用者の左右方向に向け、パッド146を使用者から離れた側で壁に向けた状態で、使用者からみて上下方向となった補助グリップ部34bと、大径パイプ10又は竿収納部30前部とを持つ。
壁の高い位置あるいは天井を研磨する場合、使用者は、竿部2を使用者の上下方向に向け、パッド146を使用者から離れた側で壁又は天井に向けた状態で、グリップ部34(使用者の上下方向となったグリップ部本体部34a又は使用者の左右方向となった補助グリップ部34b)と、大径パイプ10又は竿収納部30前部とを持つ。
いずれの場合においても、吊枠部6により、竿部2に対するヘッド部8の向き即ちパッド146の向きが所定の範囲内において調整される。
又、モータ軸180の回転により、ファン196が回転して内排気口及び外排気口198から空気が排気され、吸気口199から外排気口198への空気の流れ(風)が形成される。この風は、モータハウジング本体部158の後部内を上昇し、モータハウジング本体部158の上部内を経て、中央部内のファン196に至る。
この風によって、電動モータ138を始めとするヘッド部8の内部機構が冷却される。
特に、モータハウジング本体部158の上部内から下降する風は、電動モータ138のセンサ回路基板178の下側、及びステータ166とロータ168との間を通り、電動モータ138が効率的に冷却される。
この風によって、電動モータ138を始めとするヘッド部8の内部機構が冷却される。
特に、モータハウジング本体部158の上部内から下降する風は、電動モータ138のセンサ回路基板178の下側、及びステータ166とロータ168との間を通り、電動モータ138が効率的に冷却される。
更に、スイッチ72がオンとなると、コントローラ82の制御回路基板106に搭載された無線通信用コントローラにより無線通信アダプタ122が制御され、集塵機側無線通信アダプタとの無線通信により集塵機の起動がなされる。
集塵機のエアの吸込による集塵は、次のようになされる。即ち、加工により適宜回転するパッド146及び先端工具の周囲に生じた粉塵は、先端工具孔及びパッド孔230から、ギヤハウジング孔232、ヘッド部外側ハウジング130とギヤハウジング134との間、及びヘッド部外側ハウジング130とモータハウジング132との間を経て、第1ホース154に導かれる(図7の矢印G1参照)。第1ホース154に導かれた粉塵は、大径パイプ10の第1中空部20(粉塵通路)から小径パイプ12に達する(図5の矢印G2参照)。小径パイプ12に達した粉塵は、ジョイント40を介して集塵ホース42に吸引される(図6の矢印G3参照)。
集塵機のエアの吸込による集塵は、次のようになされる。即ち、加工により適宜回転するパッド146及び先端工具の周囲に生じた粉塵は、先端工具孔及びパッド孔230から、ギヤハウジング孔232、ヘッド部外側ハウジング130とギヤハウジング134との間、及びヘッド部外側ハウジング130とモータハウジング132との間を経て、第1ホース154に導かれる(図7の矢印G1参照)。第1ホース154に導かれた粉塵は、大径パイプ10の第1中空部20(粉塵通路)から小径パイプ12に達する(図5の矢印G2参照)。小径パイプ12に達した粉塵は、ジョイント40を介して集塵ホース42に吸引される(図6の矢印G3参照)。
以上のドライウォールサンダ1では、角柱状のバッテリ86と、バッテリ86を装着可能なバッテリ装着部36と、バッテリ86の電力により駆動される電動モータ138と、研磨面を有しており電動モータ138の駆動力により運動するパッド146と、前端部にパッド146がスピンドル142,ギヤハウジング134,ヘッド部外側ハウジング130及び吊枠部6を介して接続される竿部2と、を備えており、バッテリ装着部36に装着されたバッテリ86における最長辺Jの方向は、竿部2の中心軸Mと、中心軸Mに直交し且つパッド146の研磨面に平行な第1仮想直線Lと、の双方に直交する第2仮想直線Kに対して角度を有している。
よって、バッテリ86が、外方に突出した第2仮想直線Kに対して寝た状態となり、ドライウォールサンダ1は、バッテリ86装着時において、より一層コンパクトになり、バッテリ86が邪魔になり難い。
よって、バッテリ86が、外方に突出した第2仮想直線Kに対して寝た状態となり、ドライウォールサンダ1は、バッテリ86装着時において、より一層コンパクトになり、バッテリ86が邪魔になり難い。
又、バッテリ装着部36に装着されたバッテリ86における最長辺Jの方向は、第1仮想直線Lと同じ方向である。よって、バッテリ86が第1仮想直線Lに沿った状態となり、バッテリ86を装着したドライウォールサンダ1が更にコンパクトになる。
更に、バッテリ装着部36に装着されたバッテリ86における第2仮想直線Kの方向(上下方向)の中央部は、第1仮想直線Lの方向からみて竿部2の中心軸M上にある。よって、竿部2の中心軸Mに対してバッテリ86が上あるいは下にさほど飛び出さないように配置され、ドライウォールサンダ1がコンパクトであるし、竿部2を基準とした重量のバランスに優れて一層取り扱い易いものとなる。
又更に、竿部2におけるパッド146と反対側の端部に取り付けられたハンドル部4を備えており、ハンドル部4は、使用者が把持可能であるグリップ部34と、集塵ホース42を接続可能であるジョイント40と、を有しており、バッテリ装着部36に装着されたバッテリ86は、第2仮想直線Kの方向(上下方向)において、グリップ部34とジョイント40との間に配置されている。よって、バッテリ86が、グリップ部34及び集塵ホース42に干渉し難い位置に装着される。
更に、バッテリ装着部36に装着されたバッテリ86における第2仮想直線Kの方向(上下方向)の中央部は、第1仮想直線Lの方向からみて竿部2の中心軸M上にある。よって、竿部2の中心軸Mに対してバッテリ86が上あるいは下にさほど飛び出さないように配置され、ドライウォールサンダ1がコンパクトであるし、竿部2を基準とした重量のバランスに優れて一層取り扱い易いものとなる。
又更に、竿部2におけるパッド146と反対側の端部に取り付けられたハンドル部4を備えており、ハンドル部4は、使用者が把持可能であるグリップ部34と、集塵ホース42を接続可能であるジョイント40と、を有しており、バッテリ装着部36に装着されたバッテリ86は、第2仮想直線Kの方向(上下方向)において、グリップ部34とジョイント40との間に配置されている。よって、バッテリ86が、グリップ部34及び集塵ホース42に干渉し難い位置に装着される。
尚、本発明の形態は上記第1形態に限定されず、例えば第1形態は次のような変更例を適宜有する。
第1仮想直線L(左右方向)は、グリップ部34(補助グリップ部34b)に基づいて定められても良い。
バッテリ86は、バッテリ装着部36に対して、左側から右方へスライドさせることで装着されるようにしても良い。
バッテリ86は、六角柱状等であっても良い。
又、バッテリ86は、円柱状であっても良い。円柱の底面の直径が高さより小さい場合、円柱の高さがバッテリ86の最長辺Jとなり、円柱の底面の直径が高さより大きい場合、円柱の直径がバッテリ86の最長辺Jとなる。
第1仮想直線L(左右方向)は、グリップ部34(補助グリップ部34b)に基づいて定められても良い。
バッテリ86は、バッテリ装着部36に対して、左側から右方へスライドさせることで装着されるようにしても良い。
バッテリ86は、六角柱状等であっても良い。
又、バッテリ86は、円柱状であっても良い。円柱の底面の直径が高さより小さい場合、円柱の高さがバッテリ86の最長辺Jとなり、円柱の底面の直径が高さより大きい場合、円柱の直径がバッテリ86の最長辺Jとなる。
遊星歯車機構140の段数は、1であっても良いし、3以上であっても良い。又、他の形式の減速機構が用いられても良い。
通気孔116、内排気口,外排気口198及び吸気口199の少なくとも何れかの設置数、配置、大きさ等は、様々に変更可能である。
ファン196につき、遠心ファン以外の形式のファンが用いられても良い。
電動モータ138は、アウターロータ型であっても良いし、ブラシ付きのモータであっても良い。
電動モータ138は、ハンドル部4に配置されても良い。この場合、電動モータ138の回転力は、竿部2内を通されあるいは竿部2と並べられたシャフトにより機械的に伝達されても良い。
パッド146は、偏心スピンドルを介して偏心運動しても良い。又、パッド146の形状は、三角形であっても良い。
通気孔116、内排気口,外排気口198及び吸気口199の少なくとも何れかの設置数、配置、大きさ等は、様々に変更可能である。
ファン196につき、遠心ファン以外の形式のファンが用いられても良い。
電動モータ138は、アウターロータ型であっても良いし、ブラシ付きのモータであっても良い。
電動モータ138は、ハンドル部4に配置されても良い。この場合、電動モータ138の回転力は、竿部2内を通されあるいは竿部2と並べられたシャフトにより機械的に伝達されても良い。
パッド146は、偏心スピンドルを介して偏心運動しても良い。又、パッド146の形状は、三角形であっても良い。
バッテリ爪及び集塵ノズルの少なくとも何れかが省略されたり、各種軸受、ネジ、及びボタンのうちの少なくとも何れかの数が増減されたり、ボタンに替えてレバースイッチが用いられたり、ピニオン185がベルトとプーリに代えられたり、ネジがリベットとされたり、モータハウジング132とギヤハウジング134が一体とされたり、バッテリ装着部36においてバッテリ86が充電可能とされたり、使い切りのバッテリが用いられたりする等、各種部材又は部分の機能、配置、種類、形式、数の少なくとも何れかが適宜変更されても良い。
又、本発明は、長竿型ポリッシャあるいは長竿型グラインダ、長竿型コンクリートカンナ等の他の長竿型研磨機に適用することができる。
又、本発明は、長竿型ポリッシャあるいは長竿型グラインダ、長竿型コンクリートカンナ等の他の長竿型研磨機に適用することができる。
[第2形態]
図11は、本発明の実施の第2形態に係るドライウォールサンダ251における前部が省略された図2同様図である。図12は、ドライウォールサンダ251における前部が省略された図3同様図である。
ドライウォールサンダ251は、バッテリ装着部の数及び配置並びにバッテリの数を除き、第1形態に係るドライウォールサンダ1と同様に成る。以下、第1形態と同様に成る部分は、同じ符号が付されて適宜説明が省略される。
図11は、本発明の実施の第2形態に係るドライウォールサンダ251における前部が省略された図2同様図である。図12は、ドライウォールサンダ251における前部が省略された図3同様図である。
ドライウォールサンダ251は、バッテリ装着部の数及び配置並びにバッテリの数を除き、第1形態に係るドライウォールサンダ1と同様に成る。以下、第1形態と同様に成る部分は、同じ符号が付されて適宜説明が省略される。
ドライウォールサンダ251のハンドル部254におけるハンドルハウジング264には、バッテリ装着部286が2箇所形成されている。
一方のバッテリ装着部286は、ハンドルハウジング264の右面であって、竿収納部30の後部に配置されている。他方のバッテリ装着部286は、ハンドルハウジング264の左面であって、竿収納部30の後部に配置されている。
それぞれのバッテリ装着部286には、バッテリ86が装着可能である。
バッテリ86は、右側のバッテリ装着部286に対し、その最長辺Jが前後方向を向き、バッテリボタン95が前側となる状態で、バッテリ装着部286の前側から後方へスライドされることにより装着される。このとき、突出したバッテリ爪が右側のバッテリ装着部286に係止する。又、バッテリ電源端子92は、右側のバッテリ装着部286に配置された電源端子88に接続される。更に、右側のバッテリ装着部286に配置された通信端子90は、バッテリ通信端子94に接続される。
そして、竿部2の中心軸Mを中心として対称的である状態で、左側のバッテリ装着部286に対し、前側から後方へのスライドによりバッテリ86が装着される。突出したバッテリ爪は左側のバッテリ装着部286に係止し、電源端子88が左側のバッテリ装着部286に配置されたバッテリ電源端子92に接続され、左側のバッテリ装着部286に配置された通信端子90がバッテリ通信端子94に接続される。
コントローラ82は、18Vのバッテリ86が2個装着されている場合、各バッテリ86の直列接続により、36Vの電圧を電動モータ138に供給可能である。
一方のバッテリ装着部286は、ハンドルハウジング264の右面であって、竿収納部30の後部に配置されている。他方のバッテリ装着部286は、ハンドルハウジング264の左面であって、竿収納部30の後部に配置されている。
それぞれのバッテリ装着部286には、バッテリ86が装着可能である。
バッテリ86は、右側のバッテリ装着部286に対し、その最長辺Jが前後方向を向き、バッテリボタン95が前側となる状態で、バッテリ装着部286の前側から後方へスライドされることにより装着される。このとき、突出したバッテリ爪が右側のバッテリ装着部286に係止する。又、バッテリ電源端子92は、右側のバッテリ装着部286に配置された電源端子88に接続される。更に、右側のバッテリ装着部286に配置された通信端子90は、バッテリ通信端子94に接続される。
そして、竿部2の中心軸Mを中心として対称的である状態で、左側のバッテリ装着部286に対し、前側から後方へのスライドによりバッテリ86が装着される。突出したバッテリ爪は左側のバッテリ装着部286に係止し、電源端子88が左側のバッテリ装着部286に配置されたバッテリ電源端子92に接続され、左側のバッテリ装着部286に配置された通信端子90がバッテリ通信端子94に接続される。
コントローラ82は、18Vのバッテリ86が2個装着されている場合、各バッテリ86の直列接続により、36Vの電圧を電動モータ138に供給可能である。
かようなドライウォールサンダ251では、バッテリ装着部286に装着されたバッテリ86の最長辺Jの方向は、竿部2の中心軸Mと、中心軸Mに直交し且つパッド146の研磨面に平行な第1仮想直線L(左右方向)との双方に直交する第2仮想直線K(上下方向)に対して角度を有している。より詳細には、バッテリ86の最長辺Jの方向は、第2仮想直線Kに対して90°の角度を有していて、前後方向を向いている。
更に、バッテリ装着部286に装着されたバッテリ86における第2仮想直線Kの方向(上下方向)の中心は、竿部2の中心軸Mと、左方あるいは右方からみてオーバーラップしており、第1仮想直線Lの方向(左右方向)において重なっている。
加えて、装着されたバッテリ86は、上下方向において、上方のグリップ部34と下方のジョイント40との間に配置されている。
更に、バッテリ装着部286に装着されたバッテリ86における第2仮想直線Kの方向(上下方向)の中心は、竿部2の中心軸Mと、左方あるいは右方からみてオーバーラップしており、第1仮想直線Lの方向(左右方向)において重なっている。
加えて、装着されたバッテリ86は、上下方向において、上方のグリップ部34と下方のジョイント40との間に配置されている。
以上のドライウォールサンダ251では、角柱状のバッテリ86と、バッテリ86を装着可能な左右のバッテリ装着部286と、バッテリ86の電力により駆動される電動モータ138と、研磨面を有しており電動モータ138の駆動力により運動するパッド146と、前端部にパッド146が接続される竿部2と、を備えており、バッテリ装着部286に装着されたバッテリ86における最長辺Jの方向は、竿部2の中心軸Mと、中心軸Mに直交し且つパッド146の研磨面に平行な第1仮想直線Lとの双方に直交する第2仮想直線Kに対して角度を有している。
よって、バッテリ86が、外方に突出した第2仮想直線Kに対して寝た状態となり、ドライウォールサンダ251は、バッテリ86装着時において、より一層コンパクトになり、バッテリ86が邪魔になり難い。
よって、バッテリ86が、外方に突出した第2仮想直線Kに対して寝た状態となり、ドライウォールサンダ251は、バッテリ86装着時において、より一層コンパクトになり、バッテリ86が邪魔になり難い。
又、バッテリ装着部736に装着されたバッテリ86の最長辺Jの方向は、竿部2の中心軸Mと同じ方向である。よって、バッテリ86が中心軸Mに沿った状態となり、バッテリ86を装着したドライウォールサンダ251が更にコンパクトになる。
更に、各バッテリ装着部286に装着されたバッテリ86における第2仮想直線Kの方向(上下方向)の中央部は、第1仮想直線Lの方向からみて竿部2の中心軸M上にある。よって、竿部2の中心軸Mに対してバッテリ86が上あるいは下にさほど飛び出さないように配置され、ドライウォールサンダ251がコンパクトであるし、竿部2を基準とした重量のバランスに優れて一層取り扱い易いものとなる。
又更に、竿部2におけるパッド146と反対側の端部に取り付けられたハンドル部254を備えており、ハンドル部4は、使用者が把持可能であるグリップ部34と、集塵ホース42を接続可能であるジョイント40と、を有しており、バッテリ装着部286に装着されたバッテリ86は、第2仮想直線Kの方向(上下方向)において、グリップ部34とジョイント40との間に配置されている。よって、バッテリ86が、グリップ部34及び集塵ホース42に干渉し難い位置に装着される。
加えて、左右のバッテリ装着部286は、合計2個のバッテリ86を装着可能である。よって、1個のバッテリ86が装着される場合に比べてより高い電圧を供給可能であり、ドライウォールサンダ1が一層高出力で駆動可能となる。
更に、各バッテリ装着部286に装着されたバッテリ86における第2仮想直線Kの方向(上下方向)の中央部は、第1仮想直線Lの方向からみて竿部2の中心軸M上にある。よって、竿部2の中心軸Mに対してバッテリ86が上あるいは下にさほど飛び出さないように配置され、ドライウォールサンダ251がコンパクトであるし、竿部2を基準とした重量のバランスに優れて一層取り扱い易いものとなる。
又更に、竿部2におけるパッド146と反対側の端部に取り付けられたハンドル部254を備えており、ハンドル部4は、使用者が把持可能であるグリップ部34と、集塵ホース42を接続可能であるジョイント40と、を有しており、バッテリ装着部286に装着されたバッテリ86は、第2仮想直線Kの方向(上下方向)において、グリップ部34とジョイント40との間に配置されている。よって、バッテリ86が、グリップ部34及び集塵ホース42に干渉し難い位置に装着される。
加えて、左右のバッテリ装着部286は、合計2個のバッテリ86を装着可能である。よって、1個のバッテリ86が装着される場合に比べてより高い電圧を供給可能であり、ドライウォールサンダ1が一層高出力で駆動可能となる。
尚、第2形態は、第1形態と同様である変更例を適宜有する。
又、コントローラ82は、18Vのバッテリ86が2個装着されている場合、各バッテリ86の並列接続により、18Vの電圧を電動モータ138に供給しても良い。この場合、1個のバッテリ86が装着される場合に比べ、容量が2倍となり、駆動時間がより長くなる。更に、コントローラ82は、各バッテリ86の接続態様(直列,並列)を、専用のスイッチの状態に基づいて切り替えても良い。
加えて、バッテリ86は、少なくとも一方のバッテリ装着部336に対して、後側から前方へスライドさせて装着されるようにしても良い。
又、コントローラ82は、18Vのバッテリ86が2個装着されている場合、各バッテリ86の並列接続により、18Vの電圧を電動モータ138に供給しても良い。この場合、1個のバッテリ86が装着される場合に比べ、容量が2倍となり、駆動時間がより長くなる。更に、コントローラ82は、各バッテリ86の接続態様(直列,並列)を、専用のスイッチの状態に基づいて切り替えても良い。
加えて、バッテリ86は、少なくとも一方のバッテリ装着部336に対して、後側から前方へスライドさせて装着されるようにしても良い。
[第3形態]
図13は、本発明の実施の第3形態に係るドライウォールサンダ301における前部が省略された図2同様図である。図14は、ドライウォールサンダ301における前部が省略された図3同様図である。
ドライウォールサンダ301は、バッテリ装着部の配置を除き、第1形態に係るドライウォールサンダ1と同様に成る。以下、第1形態と同様に成る部分は、同じ符号が付されて適宜説明が省略される。
図13は、本発明の実施の第3形態に係るドライウォールサンダ301における前部が省略された図2同様図である。図14は、ドライウォールサンダ301における前部が省略された図3同様図である。
ドライウォールサンダ301は、バッテリ装着部の配置を除き、第1形態に係るドライウォールサンダ1と同様に成る。以下、第1形態と同様に成る部分は、同じ符号が付されて適宜説明が省略される。
ドライウォールサンダ301のハンドル部304におけるハンドルハウジング314の上部であって、速度調節ダイヤル80と表示部118との間に、バッテリ装着部336が形成されている。
バッテリ装着部336には、バッテリ86が装着可能である。バッテリ86は、バッテリ装着部336に対し、その最長辺Jが前後方向を向き、バッテリボタン95が前側となる状態で、バッテリ装着部336の前側から後方へスライドされることにより装着される。このとき、突出したバッテリ爪がバッテリ装着部336に係止する。又、バッテリ電源端子92は、バッテリ装着部336に配置された電源端子88に接続される。更に、バッテリ装着部336に配置された通信端子90は、バッテリ通信端子94に接続される。
バッテリ装着部336には、バッテリ86が装着可能である。バッテリ86は、バッテリ装着部336に対し、その最長辺Jが前後方向を向き、バッテリボタン95が前側となる状態で、バッテリ装着部336の前側から後方へスライドされることにより装着される。このとき、突出したバッテリ爪がバッテリ装着部336に係止する。又、バッテリ電源端子92は、バッテリ装着部336に配置された電源端子88に接続される。更に、バッテリ装着部336に配置された通信端子90は、バッテリ通信端子94に接続される。
かようなドライウォールサンダ301では、バッテリ装着部336に装着されたバッテリ86の最長辺Jの方向は、竿部2の中心軸Mと、中心軸Mに直交し且つパッド146の研磨面に平行な第1仮想直線L(左右方向)との双方に直交する第2仮想直線K(上下方向)に対して角度を有している。より詳細には、バッテリ86の最長辺Jの方向は、第2仮想直線Kに対して60°程度の角度を有していて、前後方向を向いている。
以上のドライウォールサンダ301では、角柱状のバッテリ86と、バッテリ86を装着可能なバッテリ装着部336と、バッテリ86の電力により駆動される電動モータ138と、研磨面を有しており電動モータ138の駆動力により運動するパッド146と、前端部にパッド146が接続される竿部2と、を備えており、バッテリ装着部336に装着されたバッテリ86における最長辺Jの方向は、竿部2の中心軸Mと、中心軸Mに直交し且つパッド146の研磨面に平行な第1仮想直線Lとの双方に直交する第2仮想直線Kに対して角度を有している。
よって、バッテリ86が、外方に突出した第2仮想直線Kに対して寝た状態となり、ドライウォールサンダ301は、バッテリ86装着時において、より一層コンパクトになり、バッテリ86が邪魔になり難い。
よって、バッテリ86が、外方に突出した第2仮想直線Kに対して寝た状態となり、ドライウォールサンダ301は、バッテリ86装着時において、より一層コンパクトになり、バッテリ86が邪魔になり難い。
尚、第3形態は、第1形態あるいは第2形態と同様である変更例を適宜有する。
又、第3形態において、バッテリ86は、バッテリ装着部336に対して後方からスライドさせて装着されるようにしても良い。
又、第3形態において、バッテリ86は、バッテリ装着部336に対して後方からスライドさせて装着されるようにしても良い。
[第4形態]
図15は、本発明の実施の第4形態に係るドライウォールサンダ401における前部が省略された図2同様図である。図14は、ドライウォールサンダ401における前部が省略された図3同様図である。
ドライウォールサンダ401は、バッテリ装着部の配置及び数並びにバッテリの数を除き、第3形態に係るドライウォールサンダ301と同様に成る。以下、第3形態と同様に成る部分は、同じ符号が付されて適宜説明が省略される。
図15は、本発明の実施の第4形態に係るドライウォールサンダ401における前部が省略された図2同様図である。図14は、ドライウォールサンダ401における前部が省略された図3同様図である。
ドライウォールサンダ401は、バッテリ装着部の配置及び数並びにバッテリの数を除き、第3形態に係るドライウォールサンダ301と同様に成る。以下、第3形態と同様に成る部分は、同じ符号が付されて適宜説明が省略される。
ドライウォールサンダ401のハンドル部404におけるハンドルハウジング414の上部であって、速度調節ダイヤル80と表示部118との間に、バッテリ装着部436が前後で2個形成されている。
各バッテリ装着部436には、バッテリ86が装着可能である。バッテリ86は、上のバッテリ装着部436に対し、その最長辺Jが左右方向を向き、バッテリボタン95が左側となる状態で、バッテリ装着部436の左側から右方へスライドされることにより装着される。このとき、突出したバッテリ爪がバッテリ装着部436に係止する。又、バッテリ電源端子92は、バッテリ装着部436に配置された電源端子88に接続される。更に、バッテリ装着部436に配置された通信端子90は、バッテリ通信端子94に接続される。他方、下のバッテリ装着部436に対しても、同様にバッテリ86が装着可能である。
コントローラ82は、18Vのバッテリ86が2個装着されている場合、第2形態と同様に、36Vの電圧を電動モータ138に供給可能である。
各バッテリ装着部436には、バッテリ86が装着可能である。バッテリ86は、上のバッテリ装着部436に対し、その最長辺Jが左右方向を向き、バッテリボタン95が左側となる状態で、バッテリ装着部436の左側から右方へスライドされることにより装着される。このとき、突出したバッテリ爪がバッテリ装着部436に係止する。又、バッテリ電源端子92は、バッテリ装着部436に配置された電源端子88に接続される。更に、バッテリ装着部436に配置された通信端子90は、バッテリ通信端子94に接続される。他方、下のバッテリ装着部436に対しても、同様にバッテリ86が装着可能である。
コントローラ82は、18Vのバッテリ86が2個装着されている場合、第2形態と同様に、36Vの電圧を電動モータ138に供給可能である。
かようなドライウォールサンダ401では、バッテリ装着部436に装着されたバッテリ86の最長辺Jの方向は、竿部2の中心軸Mと、中心軸Mに直交し且つパッド146の研磨面に平行な第1仮想直線L(左右方向)との双方に直交する第2仮想直線K(上下方向)に対して角度を有している。より詳細には、バッテリ86の最長辺Jの方向は、第2仮想直線Kに対して90°の角度を有していて、左右方向を向いている。
以上のドライウォールサンダ401では、角柱状のバッテリ86と、バッテリ86を装着可能なバッテリ装着部436と、バッテリ86の電力により駆動される電動モータ138と、研磨面を有しており電動モータ138の駆動力により運動するパッド146と、前端部にパッド146が接続される竿部2と、を備えており、バッテリ装着部436に装着されたバッテリ86における最長辺Jの方向は、竿部2の中心軸Mと、中心軸Mに直交し且つパッド146の研磨面に平行な第1仮想直線Lとの双方に直交する第2仮想直線Kに対して角度を有している。
よって、バッテリ86が、外方に突出した第2仮想直線Kに対して寝た状態となり、ドライウォールサンダ401は、バッテリ86装着時において、より一層コンパクトになり、バッテリ86が邪魔になり難い。
よって、バッテリ86が、外方に突出した第2仮想直線Kに対して寝た状態となり、ドライウォールサンダ401は、バッテリ86装着時において、より一層コンパクトになり、バッテリ86が邪魔になり難い。
又、バッテリ装着部486に装着されたバッテリ86における最長辺Jの方向は、第1仮想直線Lと同じ方向である。よって、バッテリ86の向きが第1仮想直線Lと同じ方向となり、バッテリ86を装着したドライウォールサンダ401が更にコンパクトになる。
更に、前後のバッテリ装着部486は、合計2個のバッテリ86を装着可能である。よって、1個のバッテリ86が装着される場合に比べてより高い電圧を供給可能であり、ドライウォールサンダ1が一層高出力で駆動可能となる。
更に、前後のバッテリ装着部486は、合計2個のバッテリ86を装着可能である。よって、1個のバッテリ86が装着される場合に比べてより高い電圧を供給可能であり、ドライウォールサンダ1が一層高出力で駆動可能となる。
尚、第4形態は、第1形態ないしは第3形態と同様である変更例を適宜有する。
又、第4形態において、バッテリ86は、バッテリ装着部436に対して右側から左方へスライドさせて装着されるようにしても良い。
又、第4形態において、バッテリ86は、バッテリ装着部436に対して右側から左方へスライドさせて装着されるようにしても良い。
[第5形態]
図17は、本発明の実施の第5形態に係るドライウォールサンダ501における図2同様図である。図18は、ドライウォールサンダ501における図3同様図である。
ドライウォールサンダ501は、バッテリ装着部の配置を除き、第1形態に係るドライウォールサンダ1と同様に成る。以下、第1形態と同様に成る部分は、同じ符号が付されて適宜説明が省略される。
図17は、本発明の実施の第5形態に係るドライウォールサンダ501における図2同様図である。図18は、ドライウォールサンダ501における図3同様図である。
ドライウォールサンダ501は、バッテリ装着部の配置を除き、第1形態に係るドライウォールサンダ1と同様に成る。以下、第1形態と同様に成る部分は、同じ符号が付されて適宜説明が省略される。
ドライウォールサンダ501のハンドル部504におけるハンドルハウジング514は、バッテリ装着部を有していない。
ドライウォールサンダ501のヘッド部508のヘッド部ハウジング547におけるヘッド部外側ハウジング530の上部には、前後左右に広がるバッテリ装着部536が形成されている。
バッテリ装着部536には、バッテリ86が装着可能である。バッテリ86は、バッテリ装着部536に対し、その最長辺Jが左右方向を向き、バッテリボタン95が左側となる状態で、バッテリ装着部536の左側から右方へスライドされることにより装着される。このとき、突出したバッテリ爪がバッテリ装着部536に係止する。又、バッテリ電源端子92は、バッテリ装着部536に配置された電源端子88に接続される。電源端子88からの電源リード線は、竿部リード線に含まれず、ヘッド部外側ハウジング530及びモータハウジング132の内方において直接電動モータ138(短絡部材177)に接続される。更に、バッテリ装着部536に配置された通信端子90は、バッテリ通信端子94に接続される。通信端子90は、竿部リード線120内のリード線(バッテリ通信リード線)によって、ハンドル部504の制御回路基板106に接続されている。
尚、ヘッド部外側ハウジング530の前上部における第1ホース接続部152は、第1形態に比べてより前方に配置されている。
ドライウォールサンダ501のヘッド部508のヘッド部ハウジング547におけるヘッド部外側ハウジング530の上部には、前後左右に広がるバッテリ装着部536が形成されている。
バッテリ装着部536には、バッテリ86が装着可能である。バッテリ86は、バッテリ装着部536に対し、その最長辺Jが左右方向を向き、バッテリボタン95が左側となる状態で、バッテリ装着部536の左側から右方へスライドされることにより装着される。このとき、突出したバッテリ爪がバッテリ装着部536に係止する。又、バッテリ電源端子92は、バッテリ装着部536に配置された電源端子88に接続される。電源端子88からの電源リード線は、竿部リード線に含まれず、ヘッド部外側ハウジング530及びモータハウジング132の内方において直接電動モータ138(短絡部材177)に接続される。更に、バッテリ装着部536に配置された通信端子90は、バッテリ通信端子94に接続される。通信端子90は、竿部リード線120内のリード線(バッテリ通信リード線)によって、ハンドル部504の制御回路基板106に接続されている。
尚、ヘッド部外側ハウジング530の前上部における第1ホース接続部152は、第1形態に比べてより前方に配置されている。
かようなドライウォールサンダ501では、バッテリ装着部536に装着されたバッテリ86の最長辺Jの方向は、竿部2の中心軸Mと、中心軸Mに直交し且つパッド146の研磨面に平行な第1仮想直線L(左右方向)との双方に直交する第2仮想直線K(上下方向)に対して角度を有している。より詳細には、バッテリ86の最長辺Jの方向は、第2仮想直線Kに対して90°の角度を有していて、左右方向を向いている。
以上のドライウォールサンダ501では、角柱状のバッテリ86と、バッテリ86を装着可能なバッテリ装着部536と、バッテリ86の電力により駆動される電動モータ138と、研磨面を有しており電動モータ138の駆動力により運動するパッド146と、前端部にパッド146が接続される竿部2と、を備えており、バッテリ装着部536に装着されたバッテリ86における最長辺Jの方向は、竿部2の中心軸Mと、中心軸Mに直交し且つパッド146の研磨面に平行な第1仮想直線Lとの双方に直交する第2仮想直線Kに対して角度を有している。
よって、バッテリ86が、外方に突出した第2仮想直線Kに対して寝た状態となり、ドライウォールサンダ501は、バッテリ86装着時において、より一層コンパクトになり、バッテリ86が邪魔になり難い。
よって、バッテリ86が、外方に突出した第2仮想直線Kに対して寝た状態となり、ドライウォールサンダ501は、バッテリ86装着時において、より一層コンパクトになり、バッテリ86が邪魔になり難い。
又、バッテリ装着部536に装着されたバッテリ86における最長辺Jの方向は、第1仮想直線Lと同じ方向である。よって、バッテリ86が第1仮想直線Lに沿った状態となり、バッテリ86を装着したドライウォールサンダ501が更にコンパクトになる。
加えて、電動モータ138及びパッド146は、ヘッド部ハウジング547に保持されており、バッテリ装着部536は、ヘッド部ハウジング547に配置されている。よって、ハンドル部504がコンパクトになるし、電源リード線が短くて済む。
又、バッテリ装着部536は、ヘッド部ハウジング547の上部に配置されている。よって、バッテリ86がヘッド部ハウジング547の上部に装着され、バッテリ86付きのヘッド部508における前後方向及び左右方向の大きさが抑制される。
加えて、電動モータ138及びパッド146は、ヘッド部ハウジング547に保持されており、バッテリ装着部536は、ヘッド部ハウジング547に配置されている。よって、ハンドル部504がコンパクトになるし、電源リード線が短くて済む。
又、バッテリ装着部536は、ヘッド部ハウジング547の上部に配置されている。よって、バッテリ86がヘッド部ハウジング547の上部に装着され、バッテリ86付きのヘッド部508における前後方向及び左右方向の大きさが抑制される。
尚、第5形態は、第1形態ないしは第4形態と同様である変更例を適宜有する。
又、第5形態において、バッテリ86は、バッテリ装着部536に対して、右側から左方へスライド装着されるようにしても良いし、前側から後方へスライド装着されるようにしても良いし、前左側あるいは前右側から斜め方向にスライド装着されるようにしても良い。
更に、バッテリ装着部536がヘッド部ハウジング547の上部に2箇所以上設けられても良い。あるいは、ヘッド部8のバッテリ装着部536に加えて、ハンドル部6のバッテリ装着部が設けられても良い。
加えて、通信端子90は、ヘッド部ハウジング547内(バッテリ装着部536内等)において別途設けられたバッテリ制御基板と、バッテリ通信リード線により接続されても良い。この場合、竿部リード線120内のリード線はバッテリ通信リード線を含まず、バッテリ通信リード線が短くて済む。又、竿部リード線120は、単数又は複数の制御リード線のみとなる。
又、第5形態において、バッテリ86は、バッテリ装着部536に対して、右側から左方へスライド装着されるようにしても良いし、前側から後方へスライド装着されるようにしても良いし、前左側あるいは前右側から斜め方向にスライド装着されるようにしても良い。
更に、バッテリ装着部536がヘッド部ハウジング547の上部に2箇所以上設けられても良い。あるいは、ヘッド部8のバッテリ装着部536に加えて、ハンドル部6のバッテリ装着部が設けられても良い。
加えて、通信端子90は、ヘッド部ハウジング547内(バッテリ装着部536内等)において別途設けられたバッテリ制御基板と、バッテリ通信リード線により接続されても良い。この場合、竿部リード線120内のリード線はバッテリ通信リード線を含まず、バッテリ通信リード線が短くて済む。又、竿部リード線120は、単数又は複数の制御リード線のみとなる。
[第6形態]
図19は、本発明の実施の第6形態に係るドライウォールサンダ601におけるヘッド部608以外が省略された図2同様図である。図20は、ドライウォールサンダ601におけるヘッド部608以外が省略された図3同様図である。
ドライウォールサンダ601は、バッテリ装着部の配置を除き、第5形態に係るドライウォールサンダ501と同様に成る。以下、第5形態と同様に成る部分は、同じ符号が付されて適宜説明が省略される。
図19は、本発明の実施の第6形態に係るドライウォールサンダ601におけるヘッド部608以外が省略された図2同様図である。図20は、ドライウォールサンダ601におけるヘッド部608以外が省略された図3同様図である。
ドライウォールサンダ601は、バッテリ装着部の配置を除き、第5形態に係るドライウォールサンダ501と同様に成る。以下、第5形態と同様に成る部分は、同じ符号が付されて適宜説明が省略される。
ドライウォールサンダ601のヘッド部608のヘッド部ハウジング647におけるヘッド部外側ハウジング630の前部(側部)には、上下左右に広がるバッテリ装着部636が形成されている。
バッテリ装着部636には、バッテリ86が装着可能である。バッテリ86は、バッテリ装着部636に対し、その最長辺Jが上下方向を向き、バッテリボタン95が上側となる状態で、バッテリ装着部636の上側から下方へスライドされることにより装着される。このとき、突出したバッテリ爪がバッテリ装着部636に係止する。又、バッテリ電源端子92は、バッテリ装着部636に配置された電源端子88に接続される。更に、バッテリ装着部636に配置された通信端子90は、バッテリ通信端子94に接続される。
尚、ヘッド部外側ハウジング630の第1ホース接続部152は、第1形態あるいは第5形態に比べてより後方に配置され、ヘッド部外側ハウジング630の後上部に形成されている。
バッテリ装着部636には、バッテリ86が装着可能である。バッテリ86は、バッテリ装着部636に対し、その最長辺Jが上下方向を向き、バッテリボタン95が上側となる状態で、バッテリ装着部636の上側から下方へスライドされることにより装着される。このとき、突出したバッテリ爪がバッテリ装着部636に係止する。又、バッテリ電源端子92は、バッテリ装着部636に配置された電源端子88に接続される。更に、バッテリ装着部636に配置された通信端子90は、バッテリ通信端子94に接続される。
尚、ヘッド部外側ハウジング630の第1ホース接続部152は、第1形態あるいは第5形態に比べてより後方に配置され、ヘッド部外側ハウジング630の後上部に形成されている。
かようなドライウォールサンダ601では、バッテリ装着部636に装着されたバッテリ86の最長辺Jの方向は、竿部2の中心軸Mと、中心軸Mに直交し且つパッド146の研磨面に平行な第1仮想直線L(左右方向)との双方に直交する第2仮想直線K(上下方向)に対して、中心軸Mとパッド146の研磨面とが平行である場合(図19,図20の場合)を除き、角度を有している。より詳細には、当該場合を除いて、バッテリ86の最長辺Jの方向は、第2仮想直線Kに対して0°を超える角度を有している。
以上のドライウォールサンダ601では、角柱状のバッテリ86と、バッテリ86を装着可能なバッテリ装着部636と、バッテリ86の電力により駆動される電動モータ138と、研磨面を有しており電動モータ138の駆動力により運動するパッド146と、前端部にパッド146が接続される竿部2と、を備えており、バッテリ装着部636に装着されたバッテリ86における最長辺Jの方向は、竿部2の中心軸Mと、中心軸Mに直交し且つパッド146の研磨面に平行な第1仮想直線Lとの双方に直交する第2仮想直線Kに対して角度を有している。
よって、バッテリ86が、外方に突出した第2仮想直線Kに対して寝た状態となり、ドライウォールサンダ601は、バッテリ86装着時において、より一層コンパクトになり、バッテリ86が邪魔になり難い。
よって、バッテリ86が、外方に突出した第2仮想直線Kに対して寝た状態となり、ドライウォールサンダ601は、バッテリ86装着時において、より一層コンパクトになり、バッテリ86が邪魔になり難い。
又、電動モータ138及びパッド146は、ヘッド部ハウジング647に保持されており、バッテリ装着部636は、ヘッド部ハウジング647に配置されている。よって、ハンドル部504がコンパクトになるし、電源リード線が短くて済む。
更に、バッテリ装着部636は、ヘッド部ハウジング647の前部に配置されている。よって、バッテリ86がヘッド部ハウジング647の前部に装着され、バッテリ86付きのヘッド部608における上下方向及び左右方向の大きさが抑制される。
加えて、バッテリ装着部636に装着されたバッテリ86における第2仮想直線Kの方向(上下方向)の中央部は、第1仮想直線Lの方向からみて竿部2の中心軸M上にある。よって、竿部2の中心軸Mに対してバッテリ86が上あるいは下にさほど飛び出さないように配置され、ドライウォールサンダ601がコンパクトであるし、竿部2を基準とした重量のバランスに優れて一層取り扱い易いものとなる。
更に、バッテリ装着部636は、ヘッド部ハウジング647の前部に配置されている。よって、バッテリ86がヘッド部ハウジング647の前部に装着され、バッテリ86付きのヘッド部608における上下方向及び左右方向の大きさが抑制される。
加えて、バッテリ装着部636に装着されたバッテリ86における第2仮想直線Kの方向(上下方向)の中央部は、第1仮想直線Lの方向からみて竿部2の中心軸M上にある。よって、竿部2の中心軸Mに対してバッテリ86が上あるいは下にさほど飛び出さないように配置され、ドライウォールサンダ601がコンパクトであるし、竿部2を基準とした重量のバランスに優れて一層取り扱い易いものとなる。
尚、第6形態は、第1形態ないしは第5形態と同様である変更例を適宜有する。
又、第6形態において、バッテリ86は、バッテリ装着部636に対して、右側から左方へスライド装着されるようにしても良いし、左側から右方へスライド装着されるようにしても良いし、下側から上方へスライド装着されるようにしても良いし、左上側あるいは右上側から斜め方向にスライド装着されるようにしても良い。
更に、バッテリ装着部636は、ヘッド部ハウジング647の左部(側部)及び右部(側部)の少なくとも一方に設けられても良い。
加えて、バッテリ装着部636は、ヘッド部ハウジング647の前部を含めた側部に2箇所以上設けられても良いし、前部と上部とに設けられても良い。
又、第6形態において、バッテリ86は、バッテリ装着部636に対して、右側から左方へスライド装着されるようにしても良いし、左側から右方へスライド装着されるようにしても良いし、下側から上方へスライド装着されるようにしても良いし、左上側あるいは右上側から斜め方向にスライド装着されるようにしても良い。
更に、バッテリ装着部636は、ヘッド部ハウジング647の左部(側部)及び右部(側部)の少なくとも一方に設けられても良い。
加えて、バッテリ装着部636は、ヘッド部ハウジング647の前部を含めた側部に2箇所以上設けられても良いし、前部と上部とに設けられても良い。
[第7形態]
図21は、本発明の実施の第7形態に係るドライウォールサンダ701における前部が省略された図2同様図である。図22は、ドライウォールサンダ701における前部が省略された図3同様図である。
ドライウォールサンダ701は、バッテリ装着部の配置を除き、第1形態に係るドライウォールサンダ1と同様に成る。以下、第1形態と同様に成る部分は、同じ符号が付されて適宜説明が省略される。
図21は、本発明の実施の第7形態に係るドライウォールサンダ701における前部が省略された図2同様図である。図22は、ドライウォールサンダ701における前部が省略された図3同様図である。
ドライウォールサンダ701は、バッテリ装着部の配置を除き、第1形態に係るドライウォールサンダ1と同様に成る。以下、第1形態と同様に成る部分は、同じ符号が付されて適宜説明が省略される。
ドライウォールサンダ701のハンドル部704におけるハンドルハウジング714の下部であって、ジョイント保持部38の前方において、バッテリ装着部736が形成されている。
バッテリ装着部736には、バッテリ86が装着可能である。バッテリ86は、バッテリ装着部736に対し、その最長辺Jが前後方向を向き、バッテリボタン95が前側となる状態で、バッテリ装着部736の前側から後方へスライドされることにより装着される。このとき、突出したバッテリ爪がバッテリ装着部736に係止する。又、バッテリ電源端子92は、バッテリ装着部736に配置された電源端子88に接続される。更に、バッテリ装着部736に配置された通信端子90は、バッテリ通信端子94に接続される。
バッテリ装着部736には、バッテリ86が装着可能である。バッテリ86は、バッテリ装着部736に対し、その最長辺Jが前後方向を向き、バッテリボタン95が前側となる状態で、バッテリ装着部736の前側から後方へスライドされることにより装着される。このとき、突出したバッテリ爪がバッテリ装着部736に係止する。又、バッテリ電源端子92は、バッテリ装着部736に配置された電源端子88に接続される。更に、バッテリ装着部736に配置された通信端子90は、バッテリ通信端子94に接続される。
かようなドライウォールサンダ701では、バッテリ装着部736に装着されたバッテリ86の最長辺Jの方向は、竿部2の中心軸Mと、中心軸Mに直交し且つパッド146の研磨面に平行な第1仮想直線L(左右方向)との双方に直交する第2仮想直線K(上下方向)に対して角度を有している。より詳細には、バッテリ86の最長辺Jの方向は、第2仮想直線Kに対して90°の角度を有していて、前後方向を向いている。
以上のドライウォールサンダ701では、角柱状のバッテリ86と、バッテリ86を装着可能なバッテリ装着部736と、バッテリ86の電力により駆動される電動モータ138と、研磨面を有しており電動モータ138の駆動力により運動するパッド146と、前端部にパッド146が接続される竿部2と、を備えており、バッテリ装着部736に装着されたバッテリ86における最長辺Jの方向は、竿部2の中心軸Mと、中心軸Mに直交し且つパッド146の研磨面に平行な第1仮想直線Lと、の双方に直交する第2仮想直線Kに対して角度を有している。
よって、バッテリ86が、外方に突出した第2仮想直線Kに対して寝た状態となり、ドライウォールサンダ701は、バッテリ86装着時において、より一層コンパクトになり、バッテリ86が邪魔になり難い。
よって、バッテリ86が、外方に突出した第2仮想直線Kに対して寝た状態となり、ドライウォールサンダ701は、バッテリ86装着時において、より一層コンパクトになり、バッテリ86が邪魔になり難い。
又、バッテリ装着部736に装着されたバッテリ86の最長辺Jの方向は、竿部2の中心軸Mと同じ方向である。よって、バッテリ86が中心軸Mに沿った状態となり、バッテリ86を装着したドライウォールサンダ701が更にコンパクトになる。
更に、竿部2におけるパッド146と反対側の端部に取り付けられたハンドル部704を備えており、ハンドル部704は、集塵ホース42を接続可能であるジョイント40を有しており、バッテリ装着部736は、ハンドル部704における、ジョイント40よりパッド146に近い部分であるジョイント40の前方に配置されている。よって、ジョイント40前方のスペースが、装着されたバッテリ86により有効に利用され、ドライウォールサンダ701がより一層コンパクトになる。
更に、竿部2におけるパッド146と反対側の端部に取り付けられたハンドル部704を備えており、ハンドル部704は、集塵ホース42を接続可能であるジョイント40を有しており、バッテリ装着部736は、ハンドル部704における、ジョイント40よりパッド146に近い部分であるジョイント40の前方に配置されている。よって、ジョイント40前方のスペースが、装着されたバッテリ86により有効に利用され、ドライウォールサンダ701がより一層コンパクトになる。
尚、第7形態は、第1形態ないしは第6形態と同様である変更例を適宜有する。
又、第7形態において、バッテリ86は、バッテリ装着部736に対して後方からスライドさせて装着されるようにしても良い。
又、第7形態において、バッテリ86は、バッテリ装着部736に対して後方からスライドさせて装着されるようにしても良い。
1,251,301,401,501,601,701・・ドライウォールサンダ(長竿型研磨機)、2・・竿部、4,254,304,404,504,704・・ハンドル部、34・・グリップ部、36,286,336,436,536,636,736・・バッテリ装着部、40・・ジョイント(集塵ホース接続部)、42・・集塵ホース、86・・バッテリ、138・・電動モータ、146・・パッド、547,647・・ヘッド部ハウジング、J・・(バッテリの)最長辺、K・・第2仮想直線、L・・第1仮想直線、M・・(竿部の)中心軸。
Claims (12)
- 角柱状又は円柱状のバッテリと、
前記バッテリを装着可能なバッテリ装着部と、
前記バッテリの電力により駆動される電動モータと、
研磨面を有しており前記電動モータの駆動力により運動するパッドと、
端部に前記パッドが接続される竿部と、
を備えており、
前記バッテリ装着部に装着された前記バッテリにおける最長辺の方向は、前記竿部の中心軸と、前記中心軸に直交し且つ前記パッドの前記研磨面に平行な第1仮想直線と、の双方に直交する第2仮想直線に対して角度を有している
ことを特徴とする長竿型研磨機。 - 前記バッテリ装着部に装着された前記バッテリの前記最長辺の方向は、前記第1仮想直線と同じ方向である
ことを特徴とする請求項1に記載の長竿型研磨機。 - 前記バッテリ装着部に装着された前記バッテリにおける前記第2仮想直線の方向の中央部は、前記第1仮想直線の方向からみて前記竿部の前記中心軸上にある
ことを特徴とする請求項1又は請求項2に記載の長竿型研磨機。 - 前記竿部における前記パッドと反対側の端部に取り付けられたハンドル部を備えており、
前記ハンドル部は、使用者が把持可能であるグリップ部と、集塵ホースを接続可能である集塵ホース接続部と、を有しており、
前記バッテリ装着部に装着された前記バッテリは、前記第2仮想直線の方向において、前記グリップ部と前記集塵ホース接続部との間に配置されている
ことを特徴とする請求項1ないしは請求項3の何れかに記載の長竿型研磨機。 - 前記バッテリ装着部に装着された前記バッテリの前記最長辺の方向は、前記竿部の前記中心軸に対して角度を有している
ことを特徴とする請求項1ないしは請求項4の何れかに記載の長竿型研磨機。 - 前記バッテリ装着部は、複数の前記バッテリを装着可能である
ことを特徴とする請求項1ないしは請求項5の何れかに記載の長竿型研磨機。 - 前記バッテリ装着部は、前記竿部を挟むように複数設けられており、
複数の前記バッテリのうちの一部は、一部の前記バッテリ装着部に装着され、
複数の前記バッテリのうちの他の一部は、他の一部の前記バッテリ装着部に装着される
ことを特徴とする請求項6に記載の長竿型研磨機。 - 前記バッテリ装着部に装着された前記バッテリの前記最長辺の方向は、前記竿部の前記中心軸と同じ方向である
ことを特徴とする請求項1ないしは請求項7の何れかに記載の長竿型研磨機。 - 前記電動モータ及び前記パッドは、ヘッド部ハウジングに保持されており、
前記バッテリ装着部は、前記ヘッド部ハウジングに配置されている
ことを特徴とする請求項1ないしは請求項8の何れかに記載の長竿型研磨機。 - 前記バッテリ装着部は、前記ヘッド部ハウジングの上部に配置されている
ことを特徴とする請求項9に記載の長竿型研磨機。 - 前記バッテリ装着部は、前記ヘッド部ハウジングの側部に配置されている
ことを特徴とする請求項9に記載の長竿型研磨機。 - 前記竿部における前記パッドと反対側の端部に取り付けられたハンドル部を備えており、
前記ハンドル部は、集塵ホースを接続可能である集塵ホース接続部を有しており、
前記バッテリ装着部は、前記ハンドル部における、前記集塵ホース接続部より前記パッドに近い部分に配置されている
ことを特徴とする請求項1ないしは請求項11の何れかに記載の長竿型研磨機。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018016666A JP2019130643A (ja) | 2018-02-01 | 2018-02-01 | 長竿型研磨機 |
| CN201910038409.5A CN110103110A (zh) | 2018-02-01 | 2019-01-16 | 长杆型抛光机 |
| US16/250,799 US20190232456A1 (en) | 2018-02-01 | 2019-01-17 | Long rod polishing device |
| DE102019102355.6A DE102019102355A1 (de) | 2018-02-01 | 2019-01-30 | Langstabpoliervorrichtung |
| US18/417,381 US20240157499A1 (en) | 2018-02-01 | 2024-01-19 | Long rod polishing device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018016666A JP2019130643A (ja) | 2018-02-01 | 2018-02-01 | 長竿型研磨機 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2019130643A true JP2019130643A (ja) | 2019-08-08 |
Family
ID=67224494
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018016666A Pending JP2019130643A (ja) | 2018-02-01 | 2018-02-01 | 長竿型研磨機 |
Country Status (4)
| Country | Link |
|---|---|
| US (2) | US20190232456A1 (ja) |
| JP (1) | JP2019130643A (ja) |
| CN (1) | CN110103110A (ja) |
| DE (1) | DE102019102355A1 (ja) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3812091A1 (en) * | 2019-10-23 | 2021-04-28 | Black & Decker Inc. | Pole sander |
| EP3812093A1 (en) * | 2019-10-23 | 2021-04-28 | Black & Decker Inc. | Pole sander |
| EP3812089A1 (en) * | 2019-10-23 | 2021-04-28 | Black & Decker Inc. | Pole sander |
| US11867224B2 (en) | 2021-01-27 | 2024-01-09 | Black & Decker Inc. | Locking mechanism for two telescoping poles of a power tool |
| US11919127B2 (en) | 2019-10-23 | 2024-03-05 | Black & Decker Inc. | Pole sander |
| US12005547B2 (en) | 2019-10-23 | 2024-06-11 | Black & Decker Inc. | Pole sander |
Families Citing this family (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9888627B2 (en) | 2012-10-15 | 2018-02-13 | Chervon (Hk) Limited | Lawncare apparatus with a foldable operating arm |
| DE102018111838A1 (de) * | 2018-05-16 | 2019-11-21 | Festool Gmbh | Mobile Werkzeugmaschine |
| JP1629184S (ja) * | 2018-10-03 | 2019-10-07 | ||
| USD929199S1 (en) * | 2019-06-03 | 2021-08-31 | Aukey Technology Co., Ltd | Sander |
| GB2590686A (en) * | 2019-12-23 | 2021-07-07 | Black & Decker Inc | Pole sander |
| GB2590705A (en) * | 2019-12-23 | 2021-07-07 | Black & Decker Inc | Pole sander |
| GB2590687A (en) * | 2019-12-23 | 2021-07-07 | Black & Decker Inc | Pole sander |
| GB2590704A (en) * | 2019-12-23 | 2021-07-07 | Black & Decker Inc | Pole sander |
| EP3812092A3 (en) * | 2019-10-23 | 2021-05-05 | Black & Decker Inc. | Pole sander |
| GB2590709A (en) * | 2019-12-23 | 2021-07-07 | Black & Decker Inc | Pole sander |
| WO2021230172A1 (ja) * | 2020-05-14 | 2021-11-18 | 工機ホールディングス株式会社 | 作業機 |
| US20220097207A1 (en) * | 2020-09-29 | 2022-03-31 | Temple Allen Holdings Llc | Surface abrading machine |
| JP7482004B2 (ja) * | 2020-11-26 | 2024-05-13 | 株式会社マキタ | 作業機 |
| CN113400112B (zh) * | 2021-06-22 | 2022-02-18 | 江苏兴海特钢有限公司 | 一种可快速降温的不锈钢材料加工设备 |
| CN115529918A (zh) * | 2021-06-29 | 2022-12-30 | 南京泉峰科技有限公司 | 割草机和无线遥控把手装置 |
| US20230001532A1 (en) * | 2021-06-30 | 2023-01-05 | Marshalltown Company | Vacuum Sander |
| CN119388299A (zh) * | 2024-12-31 | 2025-02-07 | 中诚建设有限公司 | 一种设备内壁抛光研磨装置 |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7549913B2 (en) * | 2006-09-12 | 2009-06-23 | Black & Decker Inc. | Sanding tool with pivotally coupled head assembly |
| DE102007010303A1 (de) | 2007-02-22 | 2008-08-28 | Flex-Elektrowerkzeuge Gmbh | Handgehaltene Reinigungs-/Schleifmaschine |
| US20140096796A1 (en) * | 2011-05-24 | 2014-04-10 | Hanan Frum | Motorized handheld polishing and cleaning apparatus |
| CN202292369U (zh) * | 2011-10-18 | 2012-07-04 | 许小强 | 电动打磨机 |
| EP2607016B1 (en) * | 2011-12-21 | 2016-08-10 | Makita Corporation | Sander |
| DE102012111990A1 (de) * | 2012-12-07 | 2014-06-12 | Flex-Elektrowerkzeuge Gmbh | Handgehaltene Schleifmaschine |
| US9630310B2 (en) * | 2013-02-01 | 2017-04-25 | Makita Corporation | Electric tool |
| KR20140005511U (ko) * | 2013-04-16 | 2014-10-27 | 현대중공업 주식회사 | 충전용 그라인딩 장치 |
| DE102013213271A1 (de) * | 2013-07-05 | 2015-01-08 | Flex-Elektrowerkzeuge Gmbh | Handgehaltene Schleifmaschine |
| DE102014211046A1 (de) * | 2014-06-10 | 2015-12-17 | Robert Bosch Gmbh | System mindestens umfassend einen elektronisch kommutierten Elektromotor einer definierten Baugröße und eine wiederaufladbare Batterie mindestens einer Spannungsklasse |
| DE102014111250A1 (de) * | 2014-06-13 | 2015-12-17 | Metabowerke Gmbh | Langhalsschleifer sowie Beleuchtungseinheit dafür |
| JP6632883B2 (ja) * | 2015-12-25 | 2020-01-22 | 株式会社マキタ | 電動作業機 |
| DE102016106558A1 (de) * | 2016-04-11 | 2017-10-12 | Festool Gmbh | Hand-Werkzeugmaschine mit einem Trennschalter |
| CN206140262U (zh) * | 2016-09-09 | 2017-05-03 | 苏州宝时得电动工具有限公司 | 手持式电动工具 |
| CN207344324U (zh) * | 2017-08-18 | 2018-05-11 | 南京德朔实业有限公司 | 电动工具和抛光机 |
-
2018
- 2018-02-01 JP JP2018016666A patent/JP2019130643A/ja active Pending
-
2019
- 2019-01-16 CN CN201910038409.5A patent/CN110103110A/zh active Pending
- 2019-01-17 US US16/250,799 patent/US20190232456A1/en not_active Abandoned
- 2019-01-30 DE DE102019102355.6A patent/DE102019102355A1/de active Pending
-
2024
- 2024-01-19 US US18/417,381 patent/US20240157499A1/en active Pending
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3812091A1 (en) * | 2019-10-23 | 2021-04-28 | Black & Decker Inc. | Pole sander |
| EP3812093A1 (en) * | 2019-10-23 | 2021-04-28 | Black & Decker Inc. | Pole sander |
| EP3812089A1 (en) * | 2019-10-23 | 2021-04-28 | Black & Decker Inc. | Pole sander |
| US11919127B2 (en) | 2019-10-23 | 2024-03-05 | Black & Decker Inc. | Pole sander |
| US11931851B2 (en) | 2019-10-23 | 2024-03-19 | Black & Decker Inc. | Pole sander |
| US11951585B2 (en) | 2019-10-23 | 2024-04-09 | Black & Decker Inc. | Pole sander |
| US12005547B2 (en) | 2019-10-23 | 2024-06-11 | Black & Decker Inc. | Pole sander |
| US11867224B2 (en) | 2021-01-27 | 2024-01-09 | Black & Decker Inc. | Locking mechanism for two telescoping poles of a power tool |
Also Published As
| Publication number | Publication date |
|---|---|
| US20240157499A1 (en) | 2024-05-16 |
| CN110103110A (zh) | 2019-08-09 |
| US20190232456A1 (en) | 2019-08-01 |
| DE102019102355A1 (de) | 2019-08-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2019130643A (ja) | 長竿型研磨機 | |
| JP2019130645A (ja) | 長竿型研磨機 | |
| JP4021625B2 (ja) | 集塵機及び電動工具 | |
| JP7395035B2 (ja) | 電動工具又は園芸工具 | |
| JP5991439B2 (ja) | 電動工具およびそれを用いたポリッシャ | |
| JP5914531B2 (ja) | コンパクト電動研削盤 | |
| JP5836876B2 (ja) | 電動工具 | |
| JP7042570B2 (ja) | 充電式ポリッシャ | |
| JP2020163568A (ja) | 電動工具 | |
| US11491597B2 (en) | Dust extraction device | |
| CN107107324A (zh) | 电动工具 | |
| JP2015039750A (ja) | 電動工具用ポリッシングアタッチメント | |
| JP2020157423A (ja) | 集塵システム | |
| JP2022133905A (ja) | 長竿型研磨機 | |
| JP2018143473A (ja) | ファンユニット及びこれを搭載した掃除機 | |
| JP7262209B2 (ja) | 携帯用研磨機 | |
| CN111745595B (zh) | 集尘系统 | |
| JP6803364B2 (ja) | 電動工具 | |
| JP2019130644A (ja) | 長竿型研磨機 | |
| JP7174660B2 (ja) | 集塵システム | |
| JP6266415B2 (ja) | エアコンプレッサ | |
| JP5605685B2 (ja) | 電動工具 | |
| JP6417250B2 (ja) | 電動工具 | |
| JP7195970B2 (ja) | 電動工具 | |
| JP2019018312A (ja) | ナット締め付け機及び電動工具 |