JP2019018656A - 衝突検知装置および衝突検知方法 - Google Patents
衝突検知装置および衝突検知方法 Download PDFInfo
- Publication number
- JP2019018656A JP2019018656A JP2017137239A JP2017137239A JP2019018656A JP 2019018656 A JP2019018656 A JP 2019018656A JP 2017137239 A JP2017137239 A JP 2017137239A JP 2017137239 A JP2017137239 A JP 2017137239A JP 2019018656 A JP2019018656 A JP 2019018656A
- Authority
- JP
- Japan
- Prior art keywords
- determination
- collision
- main
- sensor
- safing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images















Abstract
【課題】正突時の衝突検知を早期化することができる衝突検知装置および衝突検知方法を提供すること。【解決手段】実施形態に係る衝突検知装置は、取得部と、メイン判定部と、セーフィング判定部と、衝突判定部とを備える。取得部は、車体前部に設けられ、車両に加わる衝撃を検出する複数のセンサの検出値を取得する。メイン判定部は、取得部によって取得された第1のセンサの検出値がメイン閾値以上であるか否かのメイン判定を行う。セーフィング判定部は、取得部によって取得された第2のセンサおよび第3のセンサそれぞれについて、検出値がセーフィング閾値以上であるか否かのセーフィング判定を行う。衝突判定部は、メイン判定によりメイン閾値以上と判定され、複数のセーフィング判定のうち少なくとも1つによりセーフィング閾値以上と判定された場合に、衝撃がフルラップ衝突によると判定する。【選択図】図2
Description
本発明は、衝突検知装置および衝突検知方法に関する。
従来、衝突検知装置により車両の衝突を検知すると、例えばエアバック等を展開して乗員を保護する技術がある。衝突検知装置は、例えば「フロアセンサ」と呼ばれる車両中央付近に配置される加速度センサと、「フロントセンサ」と呼ばれる車両前部に配置される加速度センサとに基づいて衝突を検知する(例えば、特許文献1参照)。
ところで、近年、エアバッグは、乗員の保護性能の向上を目的として、高容量化が望まれている。そのため、エアバッグの高容量化に伴い、フルラップ衝突(以下、正突)時の展開判定をより早期化する必要がある。
具体的には、衝突形態が、高速の正突の場合、最も早くエアバッグを展開する必要がある一方で、例えばオフセット衝突の場合、衝突による乗員の移動スピードが正突に比べて遅いため、オフセット衝突時に、エアバッグの展開を早くしないことが好ましい。
しかしながら、従来技術は、衝突による衝撃がフロアセンサに伝達しない限り、エアバッグを展開させることができない。従って、正突時のエアバッグ展開を早めるために、衝突検知を早期化することが望まれている。
本発明は、上記に鑑みてなされたものであって、正突時の衝突検知を早期化することができる衝突検知装置および衝突検知方法を提供することを目的とする。
上述した課題を解決し、目的を達成するために、本発明に係る衝突検知装置は、取得部と、メイン判定部と、セーフィング判定部と、衝突判定部とを備える。前記取得部は、車体前部に設けられ、車両に加わる衝撃を検出する複数のセンサの検出値を取得する。前記メイン判定部は、前記取得部によって取得された第1の前記センサの検出値がメイン閾値以上であるか否かのメイン判定を行う。前記セーフィング判定部は、前記取得部によって取得された第2の前記センサおよび第3の前記センサそれぞれについて、検出値がセーフィング閾値以上であるか否かのセーフィング判定を行う。前記衝突判定部は、前記メイン判定により前記メイン閾値以上と判定され、複数の前記セーフィング判定のうち少なくとも1つにより前記セーフィング閾値以上と判定された場合に、前記衝撃がフルラップ衝突によると判定する。
本発明によれば、正突時の衝突検知を早期化することができる。
以下、添付図面を参照して、本願の開示する衝突判定装置および衝突判定方法の実施形態を詳細に説明する。なお、この実施形態により本発明が限定されるものではない。
まず、図1Aおよび図1Bを用いて実施形態に係る衝突検知方法の概要について説明する。図1Aおよび図1Bは、実施形態に係る衝突検知方法の概要を示す図である。図1Aには、車両Cが他車両100とフルラップ衝突(以下、正突)した状況を示している。
図1Aに示すように、実施形態に係る衝突検知装置10は、車両Cに搭載され、衝突検知方法を実行する。また、車両Cの車体前部には、車両Cの衝突を検知する複数のセンサ2a〜2cが搭載される。センサ2a〜2cは、例えば、車両Cの衝突時に、車両Cに加わる衝撃を検出する加速度センサである。なお、センサ2a〜2cは、加速度センサに限らず、圧力センサであってもよい。
センサ2aは、例えば、ラジエーターサポート等の車体前部における左側に設けられるセンサ(以下、フロント左センサ2aと記載する場合がある)である。センサ2bは、例えば、フロントクロスバンパーやバンパービーム等の車体前部における中央に設けられるセンサ(以下、フロント中央センサ2bと記載する場合がある)である。センサ2cは、例えば、ラジエーターサポート等の車体前部における右側に設けられるセンサ(以下、フロント右センサ2cと記載する場合がある)である。
なお、フロント中央センサ2bは、フロント左センサ2aおよびフロント右センサ2cよりも前方に設けられてもよく、並列して設けられてもよい。また、フロント中央センサ2b、フロント左センサ2aおよびフロント右センサ2cは、それぞれが1個である場合について説明するが、各センサが複数であってもよい。
ここで、従来の衝突検知方法について説明する。従来の衝突検知方法では、「フロアセンサ」と呼ばれる車両中央(運転席付近)に設けられる加速度センサと、「フロントセンサ」と呼ばれる車体前部に設けられる加速度センサとに基づいて衝突を検知していた。そして、衝突の検知をトリガーとして、例えばエアバッグ等の乗員保護装置を起動させる。
ところで、近年、エアバッグは、乗員の保護性能の向上を目的として、高容量化が望まれている。そのため、エアバッグの高容量化に伴い、正突時の展開判定をより早期化する必要がある。
しかしながら、従来の衝突検知方法では、衝突による衝撃がフロアセンサに伝達しない限り、エアバッグを展開させることができない。従って、正突時のエアバッグ展開を早めるために、衝突検知を早期化することが望まれている。
そこで、実施形態に係る衝突検知方法では、車両前部に設けられたフロントセンサによって正突を早期に検知する。ここで、図1Bを用いて実施形態に係る衝突検知方法について具体的に説明する。図1Bには、正突判定のロジックを示している。
図1Bに示すように、実施形態に係る衝突検知方法では、複数のセンサ2a〜2cによって車両Cへの衝突に伴う衝撃を検知すると、各センサ2a〜2cの検出値に基づいてメイン判定およびセーフィング判定を行う。図1Bでは、フロント中央センサ2bでメイン判定を行い、フロント左センサ2aおよびフロント右センサ2cでセーフィング判定を行うこととする。
メイン判定とは、センサ2a〜2cの検出値が予め定められたメイン閾値以上であるか否かの判定を行うことである。セーフィング判定とは、センサ2a〜2cの検出値が予め定められたセーフィング閾値以上であるか否かの判定を行うことである。なお、メイン判定およびセーフィング判定の詳細については、図4A〜4Cで後述する。
そして、実施形態に係る衝突検知方法では、メイン判定によりメイン閾値以上と判定され、複数のセーフィング判定(図1Bでは2つ)のうち少なくとも1つによりセーフィング閾値以上と判定された場合に、検出した衝撃が正突によるものであると判定する。
具体的には、図1Bに示すように、実施形態に係る衝突検知方法では、まず、ORゲートG1による論理和演算によって、フロント左センサ2aおよびフロント右センサ2cのセーフィング判定のいずれか一方からセーフィング閾値以上である判定ON信号が入力された場合に、ANDゲートG2へ判定ON信号を出力する。
つづいて、ANDゲートG2は、論理積演算を行うことによって、フロント中央センサ2bのメイン判定からメイン閾値以上である判定ON信号およびORゲートG1から判定ON信号がそれぞれ入力された場合に、エアバッグ展開させる指示を出力する。
つまり、実施形態に係る衝突検知方法では、フロアセンサに寄らずフロントセンサのみを用いて判定処理を行うため、従来に比べて、正突時の衝突検知を早期化することができる。従って、正突時のエアバッグを早期に展開することができる。
なお、実施形態に係る衝突検知方法では、メイン判定により正突とオフセット衝突を切り分けることができるが、かかる点については、後述する。
また、実施形態に係る衝突検知方法では、メイン判定およびセーフィング判定において異なる2つのセンサにより判定軸を構成するが、かかる点については後述する。
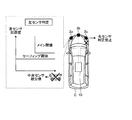
次に、図2を参照して、実施形態に係る衝突検知装置10を含む乗員保護システム1の構成について詳細に説明する。図2は、実施形態に係る乗員保護システム1の構成を示すブロック図である。図2に示すように、実施形態に係る乗員保護システム1は、フロント左センサ2aと、フロント中央センサ2bと、フロント右センサ2cと、衝突検知装置10と、エアバッグ20とを備える。
実施形態に係る衝突検知装置10は、制御部11と、記憶部12とを備える。制御部11は、取得部11aと、途絶検出部11bと、メイン判定部11cと、セーフィング判定部11dと、起動判定部11eとを備える。記憶部12は、閾値情報12aを記憶する。
ここで、衝突検知装置10は、たとえば、CPU(Central Processing Unit)、ROM(Read Only Memory)、RAM(Random Access Memory)、HDD(Hard Disk Drive)、入出力ポートなどを有するコンピュータや各種の回路を含む。
コンピュータのCPUは、たとえば、ROMに記憶されたプログラムを読み出して実行することによって、制御部11の取得部11a、途絶検出部11b、メイン判定部11c、セーフィング判定部11dおよび起動判定部11eとして機能する。
また、制御部2の取得部11a、途絶検出部11b、メイン判定部11c、セーフィング判定部11dおよび起動判定部11eの少なくともいずれか一つまたは全部をASIC(Application Specific Integrated Circuit)やFPGA(Field Programmable Gate Array)等のハードウェアで構成することもできる。
また、記憶部12は、たとえば、RAMやHDDに対応する。RAMやHDDは、閾値情報12aや、各種プログラムの情報等を記憶することができる。なお、衝突検知装置10は、有線や無線のネットワークで接続された他のコンピュータや可搬型記録媒体を介して上記したプログラムや各種情報を取得することとしてもよい。
閾値情報12aは、後述するメイン判定およびセーフィング判定の基準となる閾値を含む情報である。ここで、図3を用いて閾値情報12aについて説明する。図3は、閾値情報12aの説明図である。
図3に示すように、閾値情報12aは、「センサID」、「位置」、「メイン閾値」、「セーフィング閾値」といった項目を含む。「センサID」は、センサ2a〜2cを識別する識別情報である。「位置」は、センサ2a〜2cが搭載される位置を示す。「メイン閾値」は、メイン判定に用いられる閾値を示す情報である。「セーフィング閾値」は、セーフィング判定に用いられる閾値を示す情報である。
例えば、センサIDが「1」は、フロント中央に設けられるセンサ(フロント中央センサ2b)であり、メイン判定に用いるメイン閾値が「M1」であり、セーフィング判定に用いるセーフィング閾値が「S1」である。
なお、メイン閾値「M1」、「M2」、「M3」は、同じ閾値であってもよく、異なる閾値であってもよく、あるいは、3つのうち、いずれか2つの閾値が同じであってもよい。
同様に、セーフィング閾値「S1」、「S2」、「S3」も、同じ閾値であってもよく、異なる閾値であってもよく、あるいは、3つのうち、いずれか2つの閾値が同じであってもよい。なお、メイン閾値およびセーフィング閾値の関係については、図4A〜図4Cで後述する。
制御部11は、各センサの検出値を取得するとともに、取得した検出値に基づいてメイン判定およびセーフィング判定を行い、判定結果に基づいてエアバッグ20を起動させるか否かを判定する。
取得部11aは、車体前部に設けられ、車両Cに加わる衝撃を検出する複数のセンサ2a〜2cの検出値を取得する。具体的には、取得部11aは、フロント左センサ2a、フロント中央センサ2bおよびフロント右センサ2cの検出信号を加速度に変換するとともに、ローパスフィルタを通過させることで検出値を取得する。
取得部11aは、ローパスフィルタにより、メイン閾値またはセーフィング閾値よりもわずかに高い周波数帯を通過させる。これにより、検出値に含まれるノイズを除去できるため、後述するメイン判定およびセーフィング判定の判定精度を高めることができる。
取得部11aは、メイン閾値用のローパスフィルタを通過させた検出値をメイン判定部11cへ出力し、セーフィング閾値用のローパスフィルタを通過させた検出値をセーフィング判定部11dへ出力する。
さらに、取得部11aは、メイン閾値用のローパスフィルタを通過させた検出値の積分値を演算し、セーフィング閾値用のローパスフィルタを通過させた検出値の積分値を演算する。なお、「積分値」を「減算度」に置き換えてもよい。
なお、「積分値演算」においては、演算方法は、1)定数切り替えによる全積分、2)区間積分、3)開始/終了条件を付けた全積分のいずれかから選択が可能である。
1)は前回計算した積分値に重みを付けた全積分演算であって、今回の時間をt、重みをkとした場合に、積分値(t)=k×積分値(t−1)+加速度(t)によって演算することができる。kはたとえば加速度(t)≧2Gの場合には大きくなるように重み付けされ、加速度(t)<2Gの場合には小さくなるように重み付けされる。
2)は加速度(t)の過去直近の所定区間分の積分演算であって、所定区間はたとえば100ミリ秒程度である。衝突は概ね100〜150ミリ秒で終わると言われていることから、2)は言わば衝突時の全積分演算に相当する。
3)は開始条件および終了条件が付いた単純な積分演算であって、たとえば開始条件が加速度(t)≧2Gで、積分値(t)=積分値(t−1)+加速度(t)の演算が開始され、終了条件・加速度(t)<2Gで演算が終了する。
なお、ここまでは積分値=減速度として説明したが、減速度に代えて移動量を用いてもよい。移動量は、加速度の2階積分値に対応する。
途絶検出部11bは、フロント左センサ2a、フロント中央センサ2bおよびフロント右センサ2cと衝突検知装置10との通信の途絶を検出する。通信途絶の検出は、例えば、車両Cのエンジン始動時に行ってもよく、あるいは、走行中に一定間隔で定期的に行ってもよい。
メイン判定部11cは、取得部11aによって取得されたセンサ2a〜2cの検出値がメイン閾値以上であるか否かのメイン判定を行う。具体的には、メイン判定部11cは、取得部11aから入力される加速度の検出値および積分値が閾値情報12aに含まれる「メイン閾値」以上であるか否かを判定し、判定結果を起動判定部11eへ出力する。なお、メイン判定部11cのより詳細は判定処理については図4A〜4Cを用いて後述する。
また、メイン判定部11cは、途絶検出部11bによってセンサ2a〜2cの通信途絶が検出された場合に、判定軸を入れ替えるが、かかる点については、図6を用いて後述する。
セーフィング判定部11dは、取得部11aによって取得されたセンサ2a〜2cの検出値がセーフィング閾値以上であるか否かのセーフィング判定を行う。具体的には、セーフィング判定部11dは、取得部11aから入力される加速度の検出値および積分値が閾値情報12aに含まれる「セーフィング閾値」以上であるか否かを判定し、判定結果を起動判定部11eへ出力する。
また、セーフィング判定部11dは、途絶検出部11bによってセンサ2a〜2cの通信途絶が検出された場合に、判定軸を入れ替えるが、かかる点については、図6を用いて後述する。
ここで、図4A〜4Cを用いてメイン判定およびセーフィング判定について具体的に説明する。図4A〜4Cは、メイン判定およびセーフィング判定を説明する図である。図4A〜4Cには、正突時およびオフセット衝突時における各センサ2a〜2cの検出結果を示す。また、図4A〜4Cには、縦軸に加速度の検出値を示し、横軸に検出値の積分値を示す。
つまり、図4A〜4Cに示すように、メイン判定部11cおよびセーフィング判定部11dは、センサ2a〜2cの検出値と、検出値の積分値とに基づいてメイン判定およびセーフィング判定を行う。これにより、段差乗り上げ等における検出値の瞬間的な上昇に伴うノイズを排除することができる。
まず、図4Aを用いて、フロント中央センサ2bにおける判定処理について説明する。図4Aに示すように、メイン判定部11cおよびセーフィング判定部11dは、フロント中央センサ2bの加速度(検出値)と、フロント中央センサ2bの積分値を判定軸としている。
図4Aに示すように、フロント中央センサ2bの配置関係上、正突時がオフセット衝突時よりも加速度の初期の立ち上がり(積分値0〜1m/sの区間)が大きくなる。そこで、かかる点に着目してメイン閾値が設定される。なお、メイン閾値およびセーフィング閾値は、衝突試験等で得られた加速度の検出値を用いて予め設定される。
具体的には、メイン閾値は、初期の立ち上がりにおいて、正突のみが閾値を超え、一方で、オフセット衝突が閾値を超えないように設定される。つまり、後述する起動判定部11eは、メイン判定によりメイン閾値未満であると判定された場合に、検出された衝撃がオフセット衝突であると判定する。これにより、正突とオフセット衝突とを切り分けることができる。
なお、立ち上がりの初期以降(積分値1m/s以上)においては、メイン閾値は、オフセット衝突が閾値を超えないような値が設定される。言い換えれば、メイン閾値は、オフセット衝突時の立ち上がりに合わせて閾値を高くする。これにより、オフセット衝突時の誤判定を確実に防ぐことができる。
また、セーフィング閾値は、メイン閾値よりも低い値が設定される。具体的には、セーフィング閾値は、正突時により早く閾値を超え、かつ、通常走行時の段差乗り上げ等の衝撃により閾値を超えないような値が設定される。これにより、エアバッグ20の誤展開を防止しつつ、正突時の判定を早期化できる。
なお、セーフィング閾値は、オフセット衝突時の初期の立ち上がりにおいて、閾値を超えたとしても、後述するフロント左センサ2aやフロント右センサ2cのメイン判定によりエアバッグ20の展開を阻止できる。
次に、図4Bを用いて、フロント左センサ2aにおける判定処理について説明する。図4Bに示すように、メイン判定部11cおよびセーフィング判定部11dは、フロント左センサ2aの加速度(検出値)と、フロント右センサ2cの積分値を判定軸としている。
つまり、フロント中央センサ2bの判定処理(図4A参照)とは異なり、フロント左センサ2aおよびフロント右センサ2cの2つのセンサが判定軸に用いられる。言い換えれば、メイン判定部11cおよびセーフィング判定部11dは、車体前部の左右に設けられたセンサのうちいずれか一方のセンサの検出値と、他方のセンサの積分値とに基づいてメイン判定およびセーフィング判定を行う。
図4Bに示すように、左オフセット衝突の場合、フロント左センサ2aで検出される加速度が大きくなり、一方、フロント右センサ2cでは、衝突箇所から離れているため、検出される加速度が比較的小さくなる。そのため、左オフセット衝突のグラフは、初期の立ち上がりが大きくなるものの、ごく短時間でグラフの値が小さくなる。
図4Bに示すように、右オフセット衝突の場合、フロント左センサ2aで検出される加速度が比較的小さくなり、一方、フロント右センサ2cでは、衝突箇所に近いため、検出される加速度が比較的大きくなる。そのため、右オフセット衝突のグラフは、低い値が維持される。
そして、図4Bに示すように、正突の場合、フロント左センサ2aおよびフロント右センサ2cともに同様な検出値となるため、右肩上がりのグラフとなる。
かかる点に着目して、メイン閾値が設定される。具体的には、メイン閾値は、フロント左センサ2aの加速度が所定値以上、かつ、フロント右センサ2cの積分値が所定値以上となるように設定される。これにより、メイン判定部11cは、正突とオフセット衝突を切り分けて判定できる。
なお、セーフィング閾値は、メイン閾値よりも低い値が設定される。具体的には、セーフィング閾値は、正突時により早く閾値を超え、かつ、通常走行時の段差乗り上げ等の衝撃により閾値を超えないような値が設定される。これにより、エアバッグ20の誤展開を防止しつつ、正突時の判定を早期化できる。
次に、図4Cを用いて、フロント右センサ2cにおける判定処理について説明する。図4Cに示すように、メイン判定部11cおよびセーフィング判定部11dは、フロント右センサ2cの加速度(検出値)と、フロント左センサ2aの積分値を判定軸としている。
つまり、フロント右センサ2cの判定軸は、フロント左センサ2aの判定軸(図4B参照)のセンサを入れ替えたものである。従って、フロント右センサ2cにおけるメイン閾値およびセーフィング閾値も、フロント左センサ2aと同様の手法によって設定することができる。
なお、図4Bおよび図4Cに示すように、フロント左センサ2aとフロント右センサ2cとで、グラフの波形が若干異なるが、これは、例えばボンネット内のエンジンルーム等の車両構造が左右対称でないため、伝わる衝撃も若干異なるためである。言い換えれば、メイン閾値は、フロント左センサ2aとフロント右センサ2cとで異なる値を設定することが好ましい。
図2に戻って、起動判定部11e(衝突判定部の一例)について説明する。起動判定部11eは、メイン判定部11cおよびセーフィング判定部11dの判定結果に基づいてエアバッグ20の起動判定を行う。ここで、図5を用いて、起動判定部11eの処理内容について具体的に説明する。
図5は、起動判定部11eの処理内容を示す図である。起動判定部11eは、メイン判定によりメイン閾値以上と判定され、複数のセーフィング判定(図5では2つ)のうち少なくとも1つによりセーフィング閾値以上であると判定された場合に、衝撃がフルラップ衝突によるものであると判定し、エアバッグ20を展開させる。
具体的には、起動判定部11eは、ORゲートG11,G21,G31,G40,G50と、ANDゲートG12,G22,G32とを備える。また、図5には、第1の正突判定D1と、第2の正突判定D2と、第3の正突判定D3とを示している。
まず、第1の正突判定D1について説明する。第1の正突判定D1において、ORゲートG11は、論理和演算を行うことによって、フロント左センサ2aおよびフロント右センサ2cのセーフィング判定のいずれか一方からセーフィング閾値以上である判定ON信号が入力された場合に、ANDゲートG12へ判定ON信号を出力する。
つづいて、ANDゲートG12は、論理積演算を行うことによって、フロント中央センサ2bのメイン判定からメイン閾値以上である判定ON信号およびORゲートG11から判定ON信号がそれぞれ入力された場合に、ORゲートG40へ判定ON信号を出力する。すなわち、第1の正突判定D1の条件が成立する。
次に、第2の正突判定D2について説明する。第2の正突判定D2において、ORゲートG21は、論理和演算を行うことによって、フロント中央センサ2bおよびフロント右センサ2cのセーフィング判定のいずれか一方から判定ON信号が入力された場合に、ANDゲートG22へ判定ON信号を出力する。
つづいて、ANDゲートG22は、論理積演算を行うことによって、フロント左センサ2aのメイン判定から判定ON信号およびORゲート21から判定ON信号がそれぞれ入力された場合に、ORゲートG40へ判定ON信号を出力する。すなわち、第2の正突判定D2の条件が成立する。
次に、第3の正突判定D3について説明する。第3の正突判定D3において、ORゲートG31は、論理和演算を行うことによって、フロント左センサ2aおよびフロント中央センサ2bのセーフィング判定のいずれか一方から判定ON信号が入力された場合に、ANDゲートG32へ判定ON信号を出力する。
つづいて、ANDゲートG32は、論理積演算を行うことによって、フロント右センサ2cのメイン判定から判定ON信号およびORゲート31から判定ON信号がそれぞれ入力された場合に、ORゲートG40へ判定ON信号を出力する。すなわち、第3の正突判定D3の条件が成立する。
ORゲート40は、論理和演算を行うことによって、3つのANDゲートG12,G22,G32のうちいずれか1つから判定ON信号が入力された場合、ORゲート50へ判定ON信号を出力する。
ORゲートG50は、ORゲートG40および従来の展開判定のいずれか一方から判定ON信号が入力された場合に、エアバッグ20の展開を指示する信号を出力する。なお、従来の展開判定とは、例えば、フロントセンサとフロアセンサとの検出値に基づく判定方法である。
また、上記したように、起動判定部11eは、各センサのメイン判定において検出値がメイン閾値未満である場合、衝撃がオフセット衝突によるものと判定される。具体的には、各正突判定のメイン判定から判定ON信号が出力されない。
このため、オフセット衝突時は、従来の展開判定から判定ON信号が出力され、エアバッグ20が展開される。つまり、正突時は、実施形態に係る衝突検知装置10によってエアバッグ20を早期に展開しつつ、オフセット衝突時には、従来と同様のタイミングでエアバッグ20が展開される。これにより、正突時とオフセット衝突時とで異なるタイミングでエアバッグ20を展開できるため、乗員の安全性を高めることができる。
なお、従来の展開判定は必ずしも必要ではなく、省略することも可能である。かかる場合に、各正突判定のメイン判定によりオフセット衝突を判定した場合に、エアバッグ20の展開タイミングをずらす等の制御を行えばよい。
また、本実施形態では、3つの正突判定(第1の正突判定D1、第2の正突判定D2および第3の正突判定D3)を用いたが、必ずしも3つ必要ではなく、3つのうちいずれか1つまたはいずれか2つの正突判定を用いることとしてもよい。
次に、図6を用いて、センサ2a〜2cの通信途絶時の判定処理について説明する。図6は、通信途絶時の判定処理を示す図である。図6では、フロント右センサ2cと衝突検知装置10との通信になんらかの異常が発生した場合について説明する。
かかる場合、メイン判定部11cおよびセーフィング判定部11dは、フロント右センサ2cのメイン判定およびセーフィング判定を禁止する。
また、図6に示すように、メイン判定部11cおよびセーフィング判定部11dは、フロント左センサ2aのメイン判定およびセーフィング判定において、判定軸をフロント右センサ2cからフロント中央センサ2bに切り替える。
このとき、メイン閾値およびセーフィング閾値もフロント中央センサ2bの切り替えに伴って切り替える。なお、フロント中央センサ2bを判定軸とするメイン閾値およびセーフィング閾値は、予め衝突実験のデータ等に基づいて設定しておく。これにより、センサ故障等による通信途絶時でも展開判定の性能を落とすことなく継続することができる。
なお、図6では、通信途絶時に、判定軸を入れ替えることで判定を継続したが、判定の継続方法は、これに限らず、フロント左センサ2a単独の判定軸で展開判定を行ってもよい。つまり、フロント左センサ2aのメイン判定およびセーフィング判定は、縦軸をフロント左センサ2aの加速度(検出値)、横軸を時間で示したグラフで行う。
次に、図7A〜7Eを用いて、実施形態に係る衝突検知装置10が実行する処理の処理手順について説明する。まず、図7Aを用いて、実施形態に係る衝突検知装置10が実行する検知処理の処理手順について説明する。図7Aは、実施形態に係る衝突検知装置10が実行する検知処理の処理手順を示すフローチャートである。
図7Aに示すように、まず、取得部11aは、車体前部に設けられ、車両Cに加わる衝撃を検出するフロント中央センサ2bの検出値を取得し、センサ値取得演算処理を行う(ステップS101)。なお、センサ値取得演算処理については、図7Cを用いて後述する。
また、取得部11aは、車体前部に設けられ、車両Cに加わる衝撃を検出するフロント左センサ2aの検出値を取得し、センサ値取得演算処理を行う(ステップS102)。また、取得部11aは、車体前部に設けられ、車両Cに加わる衝撃を検出するフロント右センサ2cの検出値を取得し、センサ値取得演算処理を行う(ステップS103)。なお、ステップS101〜S103の処理順序は、互いに入れ替わってもよい。
つづいて、メイン判定部11cは、取得部11aによって取得されたフロント中央センサ2bの検出値がメイン閾値以上であるか否かのメイン判定処理を行う(ステップS104)。つづいて、セーフィング判定部11dは、取得部11aによって取得されたフロント中央センサ2bの検出値がセーフィング閾値以上であるか否かのセーフィング判定処理を行う(ステップS105)。なお、メイン判定処理については、図7Dを用い、セーフィング判定処理については、図7Eを用いて後述する。
また、メイン判定部11cは、取得部11aによって取得されたフロント左センサ2aの検出値がメイン閾値以上であるか否かのメイン判定処理を行う(ステップS106)。つづいて、セーフィング判定部11dは、取得部11aによって取得されたフロント左センサ2aの検出値がセーフィング閾値以上であるか否かのセーフィング判定処理を行う(ステップS107)。
また、メイン判定部11cは、取得部11aによって取得されたフロント右センサ2cの検出値がメイン閾値以上であるか否かのメイン判定処理を行う(ステップS108)。つづいて、セーフィング判定部11dは、取得部11aによって取得されたフロント右センサ2cの検出値がセーフィング閾値以上であるか否かのセーフィング判定処理を行う(ステップS109)。なお、ステップS104〜S109の処理順序は、互いに入れ替わってもよい。
つづいて、起動判定部11eは、第1の正突判定D1が成立したか否かを判定する(ステップS110)。なお、正突判定の成立条件については、図7Bを用いて後述する。起動判定部11eは、第1の正突判定D1が成立した場合(ステップS110,Yes)、エアバッグ20を展開させ(ステップS111)、処理を終了する。
一方、ステップS110において、起動判定部11eは、第1の正突判定D1が成立しなかった場合(ステップS110,No)、第2の正突判定D2が成立したか否かを判定する(ステップS112)。
起動判定部11eは、第2の正突判定D2が成立した場合(ステップS112,Yes)、処理をステップS111に移行する。一方、ステップS112において、起動判定部11eは、第2の正突判定D2が成立しなかった場合(ステップS112,No)、第3の正突判定D3が成立するか否かを判定する(ステップS113)。
起動判定部11eは、第3の正突判定D3が成立した場合(ステップS113,Yes)、処理をステップS111へ移行する。一方、ステップS113において、起動判定部11eは、第3の正突判定D3が成立しなかった場合(ステップS113,No)、エアバッグ20の非展開を維持し(ステップS114)、処理を終了する。
次に、図7Bを用いて、正突判定の成立条件について説明する。図7Bは、実施形態に係る正突判定の成立条件を示す図である。図7Bに示す「C_メイン判定フラグON」は、フロント中央センサ2bの検出値がメイン判定によってメイン閾値以上であると判定されたことを示す。「L(R)_セーフィング判定フラグON」は、フロント左センサ2a(フロント右センサ2c)の検出値がセーフィング判定によってセーフィング閾値以上であると判定されたことを示す。
すなわち、第1の正突判定D1は、フロント左センサ2aおよびフロント右センサ2cのセーフィング判定のOR判定を満たし、かつ、フロント中央センサ2bのメイン判定のAND条件を満たす場合に、条件が成立する。
また、第2の正突判定D2は、フロント右センサ2cおよびフロント中央センサ2bのセーフィング判定のOR判定を満たし、かつ、フロント左センサ2aのメイン判定のAND条件を満たす場合に、条件が成立する。
また、第3の正突判定D3は、フロント左センサ2aおよびフロント中央センサ2bのセーフィング判定のOR判定を満たし、かつ、フロント右センサ2cのメイン判定のAND条件を満たす場合に、条件が成立する。
次に、図7Cを用いて、実施形態に係る衝突検知装置10が実行するセンサ値取得演算処理の処理手順について説明する。図7Cは、実施形態に係る衝突検知装置10が実行するセンサ値取得演算処理の処理手順を示すフローチャートである。
まず、取得部11aは、センサ値、すなわちセンサ2a〜2cの検出値を取得する(ステップS201)。つづいて、メイン判定部11cは、検出値に対してローパスフィルタ処理を施す(ステップS202)。また、セーフィング判定部11dは、検出値に対してローパスフィルタ処理を施す(ステップS203)。なお、ステップS202およびステップS203の処理順序は、互いに入れ替わってもよい。
つづいて、メイン判定部11cは、ローパスフィルタ処理後の検出値に基づいて積分値演算処理を行い、積分値を算出する(ステップS204)。また、セーフィング判定部11dは、ローパスフィルタ処理後の検出値に基づいて積分値演算処理を行い、積分値を算出する(ステップS205)。なお、ステップS204およびステップS205の処理順序は、互いに入れ替わってもよい。
次に、図7Dを用いて、実施形態に係る衝突検知装置10が実行するメイン判定処理の処理手順について説明する。図7Dは、実施形態に係る衝突検知装置10が実行するメイン判定処理の処理手順を示すフローチャートである。
図7Dに示すように、まず、途絶検出部11bは、センサ状態をチェックすることで、センサ2a〜2cとの通信の途絶を検出する(ステップS301)。メイン判定部11cは、センサ状態が正常、つまりセンサ2a〜2cの通信が途絶していない場合(ステップS302,Yes)、メイン判定が成立したか否かを判定する(ステップS303)。
メイン判定部11cは、メイン判定が成立した場合(ステップS303,Yes)、メイン判定フラグをON(判定ON信号の出力)にして(ステップS304)、処理を終了する。
一方、ステップS302において、メイン判定部11cは、センサ状態が異常、つまりセンサ2a〜2cとの通信が途絶している場合(ステップS302,No)、判定軸を入れ替える(ステップS305)。
一方、ステップS303において、メイン判定部11cは、メイン判定が成立していない場合(ステップS303,No)、非成立から所定時間が経過したか否かを判定する(ステップS306)。
メイン判定部11cは、非成立から所定時間が経過した場合(ステップS306,Yes)、メイン判定フラグをOFFにして(ステップS307)、処理を終了する。
一方、ステップS306において、メイン判定部11cは、非成立から所定時間が経過していない場合(ステップS306,No)、メイン判定フラグをONにして(ステップS308)、処理を終了する。
次に、図7Eを用いて、実施形態に係る衝突検知装置10が実行するセーフィング判定処理の処理手順について説明する。図7Eは、実施形態に係る衝突検知装置10が実行するセーフィング判定処理の処理手順を示すフローチャートである。
図7Eに示すように、まず、途絶検出部11bは、センサ状態をチェックすることで、センサ2a〜2cとの通信の途絶を検出する(ステップS401)。セーフィング判定部11dは、センサ状態が正常、つまりセンサ2a〜2cの通信が途絶していない場合(ステップS402,Yes)、セーフィング判定が成立したか否かを判定する(ステップS403)。
セーフィング判定部11dは、セーフィング判定が成立した場合(ステップS403,Yes)、セーフィング判定フラグをON(判定ON信号の出力)にして(ステップS404)、処理を終了する。
一方、ステップS402において、セーフィング判定部11dは、センサ状態が異常、つまりセンサ2a〜2cとの通信が途絶している場合(ステップS402,No)、判定軸を入れ替える(ステップS405)。
一方、ステップS403において、セーフィング判定部11dは、セーフィング判定が成立していない場合(ステップS403,No)、非成立から所定時間が経過したか否かを判定する(ステップS406)。
セーフィング判定部11dは、非成立から所定時間が経過した場合(ステップS406,Yes)、セーフィング判定フラグをOFFにして(ステップS407)、処理を終了する。
一方、ステップS406において、セーフィング判定部11dは、非成立から所定時間が経過していない場合(ステップS406,No)、セーフィング判定フラグをONにして(ステップS408)、処理を終了する。
上述してきたように、実施形態に係る衝突検知装置10は、取得部11aと、メイン判定部11cと、セーフィング判定部11dと、衝突判定部(起動判定部11e)とを備える。取得部11aは、車体前部に設けられ、車両Cに加わる衝撃を検出する複数のセンサ2a〜2cの検出値を取得する。メイン判定部11cは、取得部11aによって取得された第1のセンサ2a〜2cの検出値がメイン閾値以上であるか否かのメイン判定を行う。セーフィング判定部11dは、取得部11aによって取得された第2のセンサ2a〜2cおよび第3のセンサ2a〜2cそれぞれについて、検出値がセーフィング閾値以上であるか否かのセーフィング判定を行う。衝突判定部は、メイン判定によりメイン閾値以上と判定され、複数のセーフィング判定のうち少なくとも1つによりセーフィング閾値以上と判定された場合に、衝撃がフルラップ衝突(正突)によると判定する。これにより、正突時の衝突検知を早期化することができる。
上述した実施形態では、車両Cと他車両100とが真直ぐ向いた正突の場合について説明したが、車両Cと他車両100とが角度のついた正突であっても実施形態に係る衝突検知方法を適用可能である。かかる点について図8Aおよび図8Bを用いて説明する。
図8Aおよび図8Bは、実施形態に係る正突の他の例を示す図である。図8Aでは、左側に角度のついた状態で他車両100と正突した場合について説明する。また、図8Bは、かかる場合の判定ロジックを示す。
図8Aに示すように、角度のついた状態で他車両100と正突した場合、フロント左センサ2aの検出値が最も大きく、フロント中央センサ2bおよびフロント右センサ2cでは、検出値がフロント左センサ2aよりも若干低くなる。
図8Bに示すように、かかる場合、第1の正突判定D1では、フロント中央センサ2bのメイン判定から判定ON信号が遅れ、エアバッグ20の展開が要求される展開時間を超過することも考えられる。
一方で、第2の正突判定D2では、フロント左センサ2aでメイン判定を行うため、判定ON信号が早期に出力される。また、第2の正突判定D2において、フロント中央センサ2bのセーフィング判定が行われる。つまり、フロント中央センサ2bでは、メイン閾値よりも低いセーフィング閾値を用いて判定するため、判定ON信号を早期に出力できる。
このように、複数の正突判定を備えることで真直ぐ向いた正突以外、例えば、角度のついた正突等であってもエアバッグ20を早期に展開させることができる。
さらなる効果や変形例は、当業者によって容易に導き出すことができる。このため、本発明のより広範な態様は、以上のように表しかつ記述した特定の詳細および代表的な実施形態に限定されるものではない。したがって、添付の特許請求の範囲およびその均等物によって定義される総括的な発明の概念の精神または範囲から逸脱することなく、様々な変更が可能である。
1 乗員保護システム
2a〜2c センサ
10 衝突検知装置
11 制御部
11a 取得部
11b 途絶検出部
11c メイン判定部
11d セーフィング判定部
11e 起動判定部(衝突判定部の一例)
12 記憶部
12a 閾値情報
20 エアバッグ
C 車両
2a〜2c センサ
10 衝突検知装置
11 制御部
11a 取得部
11b 途絶検出部
11c メイン判定部
11d セーフィング判定部
11e 起動判定部(衝突判定部の一例)
12 記憶部
12a 閾値情報
20 エアバッグ
C 車両
Claims (6)
- 車体前部に設けられ、車両に加わる衝撃を検出する複数のセンサの検出値を取得する取得部と、
前記取得部によって取得された第1の前記センサの検出値がメイン閾値以上であるか否かのメイン判定を行うメイン判定部と、
前記取得部によって取得された第2の前記センサおよび第3の前記センサそれぞれについて、検出値がセーフィング閾値以上であるか否かのセーフィング判定を行うセーフィング判定部と、
前記メイン判定により前記メイン閾値以上と判定され、複数の前記セーフィング判定のうち少なくとも1つにより前記セーフィング閾値以上と判定された場合に、前記衝撃がフルラップ衝突によると判定する衝突判定部と
を備えることを特徴とする衝突検知装置。 - 前記メイン閾値は、
オフセット衝突では越えないような値が設定されること
を特徴とする請求項1に記載の衝突検知装置。 - 前記メイン判定部は、
前記センサの検出値と、前記検出値の積分値とに基づいて前記メイン判定を行うこと
を特徴とする請求項1または2に記載の衝突検知装置。 - 前記複数のセンサは、
前記車体前部の中央および左右にそれぞれ配置され、
前記メイン判定部は、
前記車体前部の左右に設けられた前記センサのうちいずれか一方の前記センサの検出値と、他方の前記センサの前記積分値とに基づいて前記メイン判定を行うこと
を特徴とする請求項3に記載の衝突検知装置。 - 前記センサとの通信の途絶を検出する途絶検出部をさらに備え、
前記メイン判定部は、
前記途絶検出部によって前記一方の前記センサの前記途絶が検出された場合に、前記他方のセンサの検出値と、前記車体前部の中央に設けられた前記センサの積分値とに基づいて前記メイン判定を行うこと
を特徴とする請求項4に記載の衝突検知装置。 - 車体前部に設けられ、車両に加わる衝撃を検出する複数のセンサの検出値を取得する取得工程と、
前記取得工程によって取得された第1の前記センサの検出値がメイン閾値以上であるか否かのメイン判定を行うメイン判定工程と、
前記取得工程によって取得された第2の前記センサおよび第3の前記センサそれぞれについて、検出値がセーフィング閾値以上であるか否かのセーフィング判定を行うセーフィング判定工程と、
前記メイン判定により前記メイン閾値以上と判定され、複数の前記セーフィング判定のうち少なくとも1つにより前記セーフィング閾値以上と判定された場合に、前記衝撃がフルラップ衝突によると判定する衝突判定工程と
を含むことを特徴とする衝突検知方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017137239A JP2019018656A (ja) | 2017-07-13 | 2017-07-13 | 衝突検知装置および衝突検知方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017137239A JP2019018656A (ja) | 2017-07-13 | 2017-07-13 | 衝突検知装置および衝突検知方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2019018656A true JP2019018656A (ja) | 2019-02-07 |
Family
ID=65354807
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017137239A Pending JP2019018656A (ja) | 2017-07-13 | 2017-07-13 | 衝突検知装置および衝突検知方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2019018656A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021045554A (ja) * | 2019-09-13 | 2021-03-25 | グリー株式会社 | コンピュータプログラム、サーバ装置、端末装置及び方法 |
-
2017
- 2017-07-13 JP JP2017137239A patent/JP2019018656A/ja active Pending
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021045554A (ja) * | 2019-09-13 | 2021-03-25 | グリー株式会社 | コンピュータプログラム、サーバ装置、端末装置及び方法 |
| JP7398657B2 (ja) | 2019-09-13 | 2023-12-15 | グリー株式会社 | コンピュータプログラム、サーバ装置、端末装置及び方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6140816B2 (ja) | 車両/歩行者衝突を検出するためのハイブリッド方法および装置 | |
| KR100321235B1 (ko) | 자동차의 승객 보호 장치를 제어하기 위한 회로 | |
| JP4720918B2 (ja) | 乗員保護装置の起動装置 | |
| EP1585653B1 (en) | Vehicle passenger restraint system with distributed sensors | |
| US7896392B2 (en) | Airbag deployment controller and passenger protection device including the same | |
| CA2304479A1 (en) | Crash detection system | |
| JP2003034226A (ja) | ロールオーバ判別装置 | |
| JP2015536867A (ja) | 多領域の強化された識別を用いて作動可能な拘束装置を制御する方法および装置 | |
| JP4015552B2 (ja) | 車両内の少なくとも1つのエアバッグをトリガするための方法 | |
| JP5772706B2 (ja) | 乗員保護システム | |
| JP2021518304A (ja) | 車両用センサ装置およびセンサを監視する方法 | |
| JP2019018656A (ja) | 衝突検知装置および衝突検知方法 | |
| JP2004536742A (ja) | 車両衝撃検知システム及び制御方法 | |
| JP2006513915A (ja) | 拘束手段のドライブ装置 | |
| JP4457311B2 (ja) | 車両用乗員保護装置 | |
| JP4258727B2 (ja) | 車両用乗員保護装置 | |
| JP2005534575A (ja) | ポールクラッシュを識別するための装置 | |
| JP2019018657A (ja) | 衝突検知装置および衝突検知方法 | |
| JP3989309B2 (ja) | 衝突判定システム | |
| JP5041868B2 (ja) | 乗員拘束装置の起動システム | |
| JP4358737B2 (ja) | 乗員保護装置 | |
| JP2019027833A (ja) | 衝突検知装置 | |
| JP4534873B2 (ja) | 車両用乗員保護装置 | |
| JP2019018642A (ja) | 衝突検知装置および衝突検知方法 | |
| JP6734176B2 (ja) | 乗員保護装置 |