JP2018500997A - 標的生検の針軌道予測 - Google Patents
標的生検の針軌道予測 Download PDFInfo
- Publication number
- JP2018500997A JP2018500997A JP2017533581A JP2017533581A JP2018500997A JP 2018500997 A JP2018500997 A JP 2018500997A JP 2017533581 A JP2017533581 A JP 2017533581A JP 2017533581 A JP2017533581 A JP 2017533581A JP 2018500997 A JP2018500997 A JP 2018500997A
- Authority
- JP
- Japan
- Prior art keywords
- ultrasound
- plane
- biopsy
- trajectory
- target
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images


Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/08—Detecting organic movements or changes, e.g. tumours, cysts, swellings
- A61B8/0833—Detecting organic movements or changes, e.g. tumours, cysts, swellings involving detecting or locating foreign bodies or organic structures
- A61B8/0841—Detecting organic movements or changes, e.g. tumours, cysts, swellings involving detecting or locating foreign bodies or organic structures for locating instruments
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B10/00—Other methods or instruments for diagnosis, e.g. instruments for taking a cell sample, for biopsy, for vaccination diagnosis; Sex determination; Ovulation-period determination; Throat striking implements
- A61B10/02—Instruments for taking cell samples or for biopsy
- A61B10/0233—Pointed or sharp biopsy instruments
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/10—Computer-aided planning, simulation or modelling of surgical operations
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/08—Detecting organic movements or changes, e.g. tumours, cysts, swellings
- A61B8/0833—Detecting organic movements or changes, e.g. tumours, cysts, swellings involving detecting or locating foreign bodies or organic structures
- A61B8/085—Detecting organic movements or changes, e.g. tumours, cysts, swellings involving detecting or locating foreign bodies or organic structures for locating body or organic structures, e.g. tumours, calculi, blood vessels, nodules
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/12—Diagnosis using ultrasonic, sonic or infrasonic waves in body cavities or body tracts, e.g. by using catheters
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/44—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device
- A61B8/4477—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device using several separate ultrasound transducers or probes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/48—Diagnostic techniques
- A61B8/483—Diagnostic techniques involving the acquisition of a 3D volume of data
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/58—Testing, adjusting or calibrating the diagnostic device
- A61B8/587—Calibration phantoms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/10—Computer-aided planning, simulation or modelling of surgical operations
- A61B2034/107—Visualisation of planned trajectories or target regions
Abstract
Description
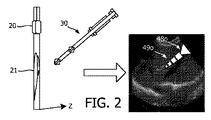
(1)平面超音波画像に対する超音波受信器31の間の針30のセグメントの仮想位置に対する長さから得られる平面超音波画像に対する未発射針30の仮想バージョンの配向を、超音波受信器31の追跡位置の機能として決定すること(“配向決定”)、及び
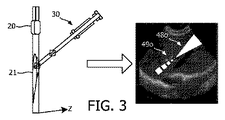
(2)針30の発射されたスタイレットの仮想位置の長さから得られた平面超音波画像に対して予め配向された発射針30の仮想バージョンの先端延伸を決定すること(“発射決定”)。
Claims (20)
- 解剖学的領域と交差する超音波平面を投射するように動作可能な超音波プローブと、
標的生検針と、
前記標的生検針に対して既知の配置の少なくとも2つの超音波受信器であって、各超音波受信器は、前記標的生検針が前記解剖学的領域内に挿入されると、前記超音波平面を検知するように動作可能である、少なくとも2つの超音波受信器と、
前記少なくとも2つの超音波受信器による前記超音波平面の検知に応答して、前記超音波平面に対する前記解剖学的領域内の前記標的生検針の生検軌道を予測するために、前記超音波プローブ及び前記少なくとも2つの超音波受信器と通信するように動作可能な超音波誘導コントローラと
を含む、標的生検システム。 - 前記標的生検針は、前記少なくとも2つの超音波受信器を含む、請求項1に記載の標的生検システム。
- 前記標的生検針は、前記解剖学的領域内の前記標的生検針の予測された前記生検軌道に沿って前記標的生検針を発射するように動作可能な発射機構を含む、請求項1に記載の標的生検システム。
- 前記標的生検針は、前記解剖学的領域内に前記標的生検針を導入するように動作可能な同軸導入機を含む、請求項1に記載の標的生検システム。
- 前記少なくとも2つの超音波受信器のうちの遠位超音波受信器は、前記標的生検針の先端に隣接し、
前記少なくとも2つの超音波受信器のうちの追加の超音波受信器の各々は、前記標的生検針上に空間的に配置される、
請求項1に記載の標的生検システム。 - 前記超音波誘導コントローラは、前記少なくとも2つの超音波受信器が前記超音波平面内にあることを示す前記超音波平面の前記検知に応答して、前記生検軌道を面内生検軌道として予測する、請求項1に記載の標的生検システム。
- 前記超音波誘導コントローラは、前記少なくとも2つの超音波受信器のうち少なくとも1つが前記超音波平面外にあることを示す前記超音波平面の前記検知に応答して、前記生検軌道を面外生検軌道として予測する、請求項6に記載の標的生検システム。
- 前記平面超音波画像を表示するために前記超音波誘導コントローラと通信するように動作可能なモニタをさらに含み、
前記超音波誘導コントローラは、前記モニタによって表示される前記解剖学的領域の平面超音波画像上の生検軌道オーバーレイの表示を制御するように動作可能であり、前記生検軌道オーバーレイは、前記超音波平面に対する前記解剖学的領域内の前記標的生検針の前記生検軌道の予測から得られる、請求項1に記載の標的生検システム。 - 前記超音波誘導コントローラは、前記少なくとも2つの超音波受信器が前記超音波平面内にあることに応答して、前記生検軌道オーバーレイの前記表示を面内生検軌道として制御する、請求項8に記載の標的生検システム。
- 前記超音波誘導コントローラは、前記少なくとも2つの超音波受信器のうち少なくとも1つが前記超音波平面外にあることに応答して、前記生検軌道オーバーレイの前記表示を面外生検軌道として制御する、請求項8に記載の標的生検システム。
- 前記モニタによる前記平面超音波画像の前記表示を制御するために、前記超音波誘導コントローラと通信するように動作可能なインターフェースプラットフォーム
をさらに含む、請求項8に記載の標的生検システム。 - 前記超音波誘導コントローラは、
超音波平面が解剖学的領域と交差することを表す超音波データに応答して、解剖学的領域の平面超音波画像を生成するために、前記超音波プローブと通信するように動作可能な超音波撮像モジュールと、
前記標的生検針が前記解剖学的領域内に挿入されると前記超音波平面の検知を表すデータを検知することに応答して、前記超音波平面に対する各超音波受信器の位置を追跡するために、前記少なくとも2つの超音波受信器と通信するように動作可能な受信器追跡モジュールと、
前記解剖学的領域の前記平面超音波画像に対する前記少なくとも2つの超音波受信器の追跡位置に応答して、前記超音波平面に対する前記標的生検針の前記生検軌道を予測するために、前記超音波撮像モジュール及び前記受信器追跡モジュールと通信するように動作可能な軌道予測モジュールと
を含む、請求項1に記載の標的生検システム。 - 超音波プローブ及び標的生検針及び少なくとも2つの超音波受信器を使用する標的生検の超音波誘導コントローラであって、
解剖学的領域と交差する超音波平面を表す超音波データに応答して、解剖学的領域の平面超音波画像を生成するために、前記超音波プローブと通信するように動作可能な超音波撮像モジュールと、
前記標的生検針が前記解剖学的領域内に挿入されると前記超音波平面の検知を表すデータを検知することに応答して、前記超音波平面に対する各超音波受信器の位置を追跡するために、前記少なくとも2つの超音波受信器と通信するように動作可能な受信器追跡モジュールと、
前記解剖学的領域の前記平面超音波画像に対する前記少なくとも2つの超音波受信器の前記追跡位置に応答して、前記超音波平面に対する前記標的生検針の生検軌道を予測するために、前記超音波撮像モジュール及び前記受信器追跡モジュールと通信するように動作可能な軌道予測モジュールと
を含む、超音波誘導コントローラ。 - 前記軌道予測モジュールは、前記少なくとも2つの超音波受信器が前記超音波平面内にあることを示す前記少なくとも2つの超音波受信器の前記追跡位置に応答して、面内生検軌道として前記生検軌道を予測する、請求項13に記載の超音波誘導コントローラ。
- 前記軌道予測モジュールは、前記少なくとも2つの超音波受信器のうち少なくとも1つが前記超音波平面外にあることを示す前記少なくとも2つの超音波受信器の前記追跡位置に応答して、前記生検軌道を面外生検軌道として予測する、請求項13に記載の超音波誘導コントローラ。
- 超音波プローブが解剖学的領域と交差する超音波平面を投射することと、
少なくとも2つの超音波受信器は、標的生検針が前記解剖学的領域内に挿入されると前記超音波平面を検知することと、
超音波誘導コントローラは、前記超音波平面に対する前記解剖学的領域内の前記標的生検針の生検軌道を予測することと
を含む、標的生検方法。 - 前記超音波誘導コントローラは、前記少なくとも2つの超音波受信器が前記超音波平面内にあることを示す前記超音波平面の前記検知に応答して、前記生検軌道を面内生検軌道として予測する、請求項16に記載の標的生検方法。
- 前記超音波誘導コントローラは、前記少なくとも2つの超音波受信器のうち少なくとも1つが前記超音波平面外にあることを示す前記少なくとも2つの超音波受信器の前記追跡位置に応答して、前記生検軌道を面外生検軌道として予測する、請求項16に記載の標的生検方法。
- 前記超音波誘導コントローラは、前記超音波平面に対する前記解剖学的領域内の前記標的生検針の前記生検軌道の前記予測から得られた前記解剖学的領域の平面超音波画像上の生検軌道オーバーレイの表示を制御すること
をさらに含む、請求項16に記載の標的生検方法。 - 前記少なくとも2つの超音波受信器のうちの遠位超音波受信器は、前記標的生検針の先端に隣接し、
前記少なくとも2つの超音波受信器のうちの追加の超音波受信器の各々は、前記標的生検針に対して空間的に配置される、
請求項16に記載の標的生検方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201462096569P | 2014-12-24 | 2014-12-24 | |
| US62/096,569 | 2014-12-24 | ||
| PCT/IB2015/059494 WO2016103094A1 (en) | 2014-12-24 | 2015-12-10 | Needle trajectory prediction for target biopsy |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018500997A true JP2018500997A (ja) | 2018-01-18 |
| JP2018500997A5 JP2018500997A5 (ja) | 2019-01-24 |
Family
ID=55066697
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017533581A Pending JP2018500997A (ja) | 2014-12-24 | 2015-12-10 | 標的生検の針軌道予測 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20180000446A1 (ja) |
| EP (1) | EP3236859B1 (ja) |
| JP (1) | JP2018500997A (ja) |
| CN (1) | CN107106126B (ja) |
| WO (1) | WO2016103094A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021520935A (ja) * | 2018-05-04 | 2021-08-26 | ホロジック, インコーポレイテッドHologic, Inc. | 生検針の可視化 |
Families Citing this family (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8532745B2 (en) | 2006-02-15 | 2013-09-10 | Hologic, Inc. | Breast biopsy and needle localization using tomosynthesis systems |
| EP2485651B1 (en) | 2009-10-08 | 2020-12-23 | Hologic, Inc. | Needle breast biopsy system |
| WO2012071429A1 (en) | 2010-11-26 | 2012-05-31 | Hologic, Inc. | User interface for medical image review workstation |
| CN110353709A (zh) | 2011-03-08 | 2019-10-22 | 霍洛吉克公司 | 双能和/或造影增强乳房成像的系统和方法 |
| JP2014534042A (ja) | 2011-11-27 | 2014-12-18 | ホロジック, インコーポレイテッドHologic, Inc. | マンモグラフィーおよび/またはトモシンセシス画像データを使用して2d画像を生成するためのシステムおよび方法 |
| US9805507B2 (en) | 2012-02-13 | 2017-10-31 | Hologic, Inc | System and method for navigating a tomosynthesis stack using synthesized image data |
| EP2967479B1 (en) | 2013-03-15 | 2018-01-31 | Hologic Inc. | Tomosynthesis-guided biopsy in prone |
| JP2016533803A (ja) | 2013-10-24 | 2016-11-04 | アンドリュー ピー. スミス, | X線誘導胸部生検をナビゲートするためのシステムおよび方法 |
| AU2015222981B2 (en) | 2014-02-28 | 2019-01-31 | Hologic, Inc. | System and method for generating and displaying tomosynthesis image slabs |
| EP3582692A1 (en) * | 2017-02-14 | 2019-12-25 | Koninklijke Philips N.V. | Path tracking in ultrasound system for device tracking |
| CN110621233B (zh) | 2017-03-30 | 2023-12-12 | 豪洛捷公司 | 用于处理乳房组织图像数据的方法 |
| US11445993B2 (en) | 2017-03-30 | 2022-09-20 | Hologic, Inc. | System and method for targeted object enhancement to generate synthetic breast tissue images |
| WO2018183548A1 (en) | 2017-03-30 | 2018-10-04 | Hologic, Inc. | System and method for hierarchical multi-level feature image synthesis and representation |
| EP3641635A4 (en) | 2017-06-20 | 2021-04-07 | Hologic, Inc. | DYNAMIC SELF-LEARNING MEDICAL IMAGING PROCESS AND SYSTEM |
| WO2019053614A1 (en) * | 2017-09-15 | 2019-03-21 | Elesta S.R.L. | APPARATUS AND METHOD FOR NEGOULE ULTRASOUND GUIDANCE IN MINI-INVASIVE INTERVENTIONS |
| US20210000553A1 (en) * | 2018-05-04 | 2021-01-07 | Hologic, Inc. | Introducer and localization wire visualization |
| CN112334076A (zh) * | 2018-06-29 | 2021-02-05 | 皇家飞利浦有限公司 | 利用超声成像进行活检预测和引导以及相关联的设备、系统和方法 |
| US11642100B2 (en) * | 2018-09-20 | 2023-05-09 | Mayo Foundation For Medical Education And Research | Systems and methods for localizing a medical device using symmetric Doppler frequency shifts measured with ultrasound imaging |
| EP3870062A1 (en) * | 2018-10-25 | 2021-09-01 | Koninklijke Philips N.V. | System and method for estimating location of tip of intervention device in acoustic imaging |
| US11129588B2 (en) * | 2019-06-19 | 2021-09-28 | Paul Adams | Ultrasound probe with an integrated needle assembly and a computer program product, a method and a system for providing a path for inserting a needle of the ultrasound probe |
| US11883206B2 (en) | 2019-07-29 | 2024-01-30 | Hologic, Inc. | Personalized breast imaging system |
| JP7465342B2 (ja) | 2019-09-27 | 2024-04-10 | ホロジック, インコーポレイテッド | 2d/3d乳房画像を精査するための読み取り時間および読み取り複雑性を予測するためのaiシステム |
| US11481038B2 (en) | 2020-03-27 | 2022-10-25 | Hologic, Inc. | Gesture recognition in controlling medical hardware or software |
| JP2023077827A (ja) * | 2021-11-25 | 2023-06-06 | 富士フイルム株式会社 | 超音波診断装置および超音波診断装置の制御方法 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000500031A (ja) * | 1995-07-16 | 2000-01-11 | ウルトラ−ガイド リミティド | フリーハンドでの針案内の照準 |
| JP2000185041A (ja) * | 1998-10-14 | 2000-07-04 | Toshiba Corp | 超音波診断装置 |
| JP2007536063A (ja) * | 2004-05-10 | 2007-12-13 | エンビジョニアリング エル.エル.シー. | 標的生検搬送システム |
| JP2014516738A (ja) * | 2011-06-13 | 2014-07-17 | コーニンクレッカ フィリップス エヌ ヴェ | 二次元撮像プローブを用いる三次元針位置特定 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1176241A (ja) * | 1997-09-10 | 1999-03-23 | Nippon Vinyl Kogyo Kk | 超音波診断装置 |
| US7068867B2 (en) * | 2003-01-02 | 2006-06-27 | Glucon Medical Ltd | Ultrasonic position indicator |
| US20060241450A1 (en) * | 2003-03-17 | 2006-10-26 | Biotelligent Inc. | Ultrasound guided tissue measurement system |
| HRP20030990A2 (en) * | 2003-11-27 | 2006-02-28 | Branko Breyer Ivo Čikeš | System for guidance and control of minimum invasive delivery of therapy with medical agents |
| CN104382650B (zh) * | 2008-05-28 | 2017-04-12 | 泰克尼恩研究和发展基金有限公司 | 用于柔性针操纵的超声引导机器人 |
| CN102413772B (zh) * | 2009-04-28 | 2014-06-11 | 皇家飞利浦电子股份有限公司 | 具有超声换能器的活检引导系统及其使用方法 |
| US9256947B2 (en) * | 2010-03-19 | 2016-02-09 | Koninklijke Philips N.V. | Automatic positioning of imaging plane in ultrasonic imaging |
| WO2011138698A1 (en) * | 2010-05-03 | 2011-11-10 | Koninklijke Philips Electronics N.V. | Ultrasonic tracking of ultrasound transducer(s) aboard an interventional tool |
| RU2638621C2 (ru) * | 2012-01-18 | 2017-12-14 | Конинклейке Филипс Н.В. | Ультразвуковое управление траекторией иглы во время биопсии |
| GB201307551D0 (en) * | 2013-04-26 | 2013-06-12 | Ucl Business Plc | A method and apparatus for determining the location of a medical instrument with respect to ultrasound imaging and a medical instrument |
-
2015
- 2015-12-10 US US15/537,497 patent/US20180000446A1/en not_active Abandoned
- 2015-12-10 JP JP2017533581A patent/JP2018500997A/ja active Pending
- 2015-12-10 EP EP15817563.8A patent/EP3236859B1/en active Active
- 2015-12-10 WO PCT/IB2015/059494 patent/WO2016103094A1/en active Application Filing
- 2015-12-10 CN CN201580070658.2A patent/CN107106126B/zh active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000500031A (ja) * | 1995-07-16 | 2000-01-11 | ウルトラ−ガイド リミティド | フリーハンドでの針案内の照準 |
| JP2000185041A (ja) * | 1998-10-14 | 2000-07-04 | Toshiba Corp | 超音波診断装置 |
| JP2007536063A (ja) * | 2004-05-10 | 2007-12-13 | エンビジョニアリング エル.エル.シー. | 標的生検搬送システム |
| JP2014516738A (ja) * | 2011-06-13 | 2014-07-17 | コーニンクレッカ フィリップス エヌ ヴェ | 二次元撮像プローブを用いる三次元針位置特定 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021520935A (ja) * | 2018-05-04 | 2021-08-26 | ホロジック, インコーポレイテッドHologic, Inc. | 生検針の可視化 |
| JP7244540B2 (ja) | 2018-05-04 | 2023-03-22 | ホロジック, インコーポレイテッド | 生検針の可視化 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2016103094A1 (en) | 2016-06-30 |
| EP3236859A1 (en) | 2017-11-01 |
| EP3236859B1 (en) | 2021-03-31 |
| US20180000446A1 (en) | 2018-01-04 |
| CN107106126B (zh) | 2021-05-28 |
| CN107106126A (zh) | 2017-08-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2018500997A (ja) | 標的生検の針軌道予測 | |
| US11596475B2 (en) | Systems and methods for ultrasound image-guided ablation antenna placement | |
| JP6843073B2 (ja) | 画像誘導式生検のための処置中の精度フィードバック | |
| JP6796600B2 (ja) | マイクロ波アブレーション計画及び処置システム | |
| US20200237403A1 (en) | Systems And Methods For Tracking Medical Devices | |
| JP6827931B2 (ja) | 電磁誘導のための追跡品質制御 | |
| US9892557B2 (en) | Integrated system for focused treatment and methods thereof | |
| CN209360741U (zh) | 用于消融区检测的系统 | |
| US20160210511A1 (en) | Imaging based instrument event tracking | |
| EP3545852B1 (en) | Electromagnetic navigation bronchoscopy using ultrasound |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181207 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20181207 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190830 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190830 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20191224 |
|
| C60 | Trial request (containing other claim documents, opposition documents) |
Free format text: JAPANESE INTERMEDIATE CODE: C60 Effective date: 20200422 |
|
| C22 | Notice of designation (change) of administrative judge |
Free format text: JAPANESE INTERMEDIATE CODE: C22 Effective date: 20200720 |
|
| C13 | Notice of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: C13 Effective date: 20200818 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201113 |
|
| C22 | Notice of designation (change) of administrative judge |
Free format text: JAPANESE INTERMEDIATE CODE: C22 Effective date: 20201124 |
|
| C23 | Notice of termination of proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C23 Effective date: 20201208 |
|
| C03 | Trial/appeal decision taken |
Free format text: JAPANESE INTERMEDIATE CODE: C03 Effective date: 20210108 |
|
| C30A | Notification sent |
Free format text: JAPANESE INTERMEDIATE CODE: C3012 Effective date: 20210108 |