JP2018192591A - ネジガイド装置およびネジ締めロボットシステム - Google Patents
ネジガイド装置およびネジ締めロボットシステム Download PDFInfo
- Publication number
- JP2018192591A JP2018192591A JP2017100344A JP2017100344A JP2018192591A JP 2018192591 A JP2018192591 A JP 2018192591A JP 2017100344 A JP2017100344 A JP 2017100344A JP 2017100344 A JP2017100344 A JP 2017100344A JP 2018192591 A JP2018192591 A JP 2018192591A
- Authority
- JP
- Japan
- Prior art keywords
- screw
- guide
- fastening
- guide device
- screw hole
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23P—METAL-WORKING NOT OTHERWISE PROVIDED FOR; COMBINED OPERATIONS; UNIVERSAL MACHINE TOOLS
- B23P19/00—Machines for simply fitting together or separating metal parts or objects, or metal and non-metal parts, whether or not involving some deformation; Tools or devices therefor so far as not provided for in other classes
- B23P19/04—Machines for simply fitting together or separating metal parts or objects, or metal and non-metal parts, whether or not involving some deformation; Tools or devices therefor so far as not provided for in other classes for assembling or disassembling parts
- B23P19/06—Screw or nut setting or loosening machines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23P—METAL-WORKING NOT OTHERWISE PROVIDED FOR; COMBINED OPERATIONS; UNIVERSAL MACHINE TOOLS
- B23P19/00—Machines for simply fitting together or separating metal parts or objects, or metal and non-metal parts, whether or not involving some deformation; Tools or devices therefor so far as not provided for in other classes
- B23P19/001—Article feeders for assembling machines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23P—METAL-WORKING NOT OTHERWISE PROVIDED FOR; COMBINED OPERATIONS; UNIVERSAL MACHINE TOOLS
- B23P19/00—Machines for simply fitting together or separating metal parts or objects, or metal and non-metal parts, whether or not involving some deformation; Tools or devices therefor so far as not provided for in other classes
- B23P19/001—Article feeders for assembling machines
- B23P19/006—Holding or positioning the article in front of the applying tool
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23P—METAL-WORKING NOT OTHERWISE PROVIDED FOR; COMBINED OPERATIONS; UNIVERSAL MACHINE TOOLS
- B23P19/00—Machines for simply fitting together or separating metal parts or objects, or metal and non-metal parts, whether or not involving some deformation; Tools or devices therefor so far as not provided for in other classes
- B23P19/10—Aligning parts to be fitted together
- B23P19/12—Alignment of parts for insertion into bores
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23P—METAL-WORKING NOT OTHERWISE PROVIDED FOR; COMBINED OPERATIONS; UNIVERSAL MACHINE TOOLS
- B23P19/00—Machines for simply fitting together or separating metal parts or objects, or metal and non-metal parts, whether or not involving some deformation; Tools or devices therefor so far as not provided for in other classes
- B23P19/04—Machines for simply fitting together or separating metal parts or objects, or metal and non-metal parts, whether or not involving some deformation; Tools or devices therefor so far as not provided for in other classes for assembling or disassembling parts
- B23P19/06—Screw or nut setting or loosening machines
- B23P19/065—Arrangements for torque limiters or torque indicators in screw or nut setting machines
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Manipulator (AREA)
- Automatic Assembly (AREA)
- Details Of Spanners, Wrenches, And Screw Drivers And Accessories (AREA)
Abstract
【解決手段】締結対象物200に形成されたネジ穴201に対してネジ締め装置4によって締結されるネジ100を、ネジ穴201に案内するネジガイド装置5であって、締結対象物200を支持する支持部側に設けられたガイド装置本体51と、ガイド装置本体51に設けられ、ネジ100の軸部101の中心軸Cに直交する径方向に開閉可能で、閉状態にあるときに軸部101が挿通されるネジ挿通部を形成するガイド部材52とを備えるネジガイド装置5を提供する。
【選択図】図2
Description
このため、例えば、一対のブロックでネジを挟み付けて保持することでネジをネジ穴に位置決めする位置決め機構を備えたボルト挿入装置が知られている(例えば、特許文献1参照。)。
また、ネジ締め装置と締結対象物との間に、複雑な構成の位置決め機構を配置する必要がある。このため、位置決め機構との干渉を避けなければならず、ネジ締め装置の動作の自由度が制限されるという問題もある。
また、特許文献2に開示されたネジ締め装置においては、ネジは、一対のネジ保持部材の間に、シュートを通して自重により供給されてセットされる。すなわち、ネジは、一対のネジ保持部材によって挟み込まれて保持されているわけではない。このため、ネジを鉛直上方以外の方向からネジ穴に挿入する場合、一対のネジ保持部材の間でネジがぐらつき、ネジ穴に対する位置決めが困難となる。さらに、ネジ締め装置のビットをネジの頭部に押し当てても、ネジ締め装置のシャフトとビットとの間、ビットとネジの頭部との間には、クリアランスが存在するため、ネジをネジ穴に対して位置決めすることは難しい。
本発明の一態様は、締結対象物に形成されたネジ穴に対してネジ締め装置によって締結されるネジを、前記ネジ穴に案内するネジガイド装置であって、前記締結対象物を支持する支持部側に設けられたガイド装置本体と、前記ガイド装置本体に設けられ、前記ネジの軸部の中心軸に直交する径方向に開閉可能で、閉状態にあるときに前記軸部が挿通されるネジ挿通部を形成するガイド部材とを備えるネジガイド装置を提供する。
このようにすることで、複数のガイドビットが径方向に移動することで、ガイド部材は、ネジの軸部の径方向に開閉する。これにより、閉状態でガイド部材に形成されるネジ挿通部が、開状態では拡径し、ネジの頭部やネジ締め装置と干渉するのを抑えることができる。
このようにすることで、ガイド装置本体は、締結対象物とネジ締め装置との間に存在せず、ガイド部材のみが締結対象物とネジ締め装置との間に位置することになる。したがって、ネジ締め装置が、ガイド装置と干渉するのを抑え、その動作の自由度が高まる。
このようにすることで、ネジをネジ挿通部に挿通させるときに、ネジの先端部がネジ穴に円滑に案内される。
このようにすることで、ネジをネジ挿通部に挿通させるときに、ネジの先端部がネジ穴の周囲で締結対象物に引っ掛かることがなく、ネジ穴に、円滑かつ確実に案内される。
このようにすることで、第一アクチュエータでガイド部材を開閉駆動することによって、ネジをネジ穴に締結する際には、ガイド部材を閉状態としてネジ挿通部を形成し、ネジをネジ穴に挿入した後には、ガイド部材を開状態として、ネジがガイド部材に干渉するのを避けることができる。
このようにすることで、ネジをネジ穴に締結する際には、付勢部材の付勢力によってガイド部材を閉状態としてネジ挿通部を形成する。また、ネジをネジ穴に挿入する際には、ネジの頭部やネジを締結させるためにネジ締め装置に設けられたソケットがガイド部材に突き当たることで、ガイド部材が付勢部材の付勢力に抗して開き、ネジがガイド部材に干渉するのを避けることができる。
このようにすることで、ネジをネジ穴に挿入するときのみ、ガイド部材を締結対象物とネジ締め装置との間に位置させ、それ以外のときには、第二アクチュエータによってガイド部材を退避させることで、ネジ締め装置がガイド部材に干渉するのを抑えることができる。これにより、ネジ締め装置の動作の自由度を高めることができる。
このようにすることで、第三アクチュエータによって、ガイド部材を、締結対象物とネジ締め装置とが対向する方向に沿って締結対象物から離間させれば、ガイド部材が、ネジ穴に締結したネジの頭部と干渉するのを抑えることができる。したがって、例えば、締結対象物にネジ穴が複数形成されている場合、一のネジ穴にネジを締結した後、他のネジ穴にガイド部材とネジ締め装置を移動させる際に、ガイド部材が、一のネジ穴に締結したネジの頭部に干渉するのを抑えることができる。
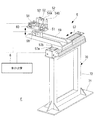
本実施形態に係るネジ締めロボットシステム1は、図1に示されるように、締結対象物200を支持する支持部2と、ロボット3と、ネジ締め装置4と、ネジガイド装置5と、制御装置6(図2参照。)とを備えている。
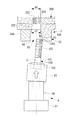
ネジ締め装置4は、ロボット3のアーム32の先端部に設けられている。ネジ締め装置4は、アーム32の駆動により、締結対象物200に対して移動可能に設けられている。図1および図2に示すように、ネジ締め装置4は、いわゆるナットランナであり、アーム32の先端部に設けられたハンド33に保持されたネジ締め装置本体41と、ネジ締め装置本体41によって中心軸回りに回転駆動されるシャフト42と、シャフト42の先端部に設けられたソケット43とを備える。
ソケット43は、略円筒状で、その内周面が、ネジ穴201に締結させるネジ100の頭部102に係合する。このソケット43には、図示しないネジ供給機構から、ネジ100が1本ずつ供給される。ネジ100は、頭部102をソケット43内に収め、軸部101を上方に向けて延ばした状態で保持される。
このようなネジ締め装置4は、ソケット43をネジ100の頭部102に係合させた状態で、ネジ締め装置本体41によってシャフト42をその軸心回りに回転駆動することによって、ネジ100を回転させる。
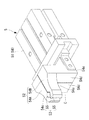
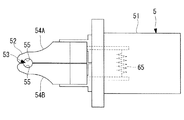
ネジガイド装置5は、締結対象物200に形成されたネジ穴201に対してネジ締め装置4によって締結されるネジ100を、ネジ穴201に案内する。図2および図3に示すように、ネジガイド装置5は、ガイド装置本体51と、ガイド部材52とを備えている。
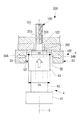
図4および図5に示すように、ガイド装置本体51は、ガイド部材52を構成する一対のガイドビット54A,54Bを、締結対象物200に形成されたネジ穴201の径方向に開閉駆動させる開閉アクチュエータ(第一アクチュエータ)56である。
図6に示すように、ネジ挿通部53は、ネジ穴201に近接した側の上端部の径寸法d1が、ネジ穴201の開口端部202の内径dn以下となるように形成されている。
また、図7に示すように、開閉アクチュエータ56によってガイドビット54A,54Bが開状態となると、ネジ挿通部53において、ネジ穴201に近接した側の上端部の径寸法d1’は、ネジ100の頭部102およびソケット43の外径ds以上となる。
また、ネジガイド装置5は、ガイド装置本体51が、締結対象物200とネジ締め装置4とが対向する方向に交差する方向において、締結対象物200の外側に配置されている。さらに、ネジガイド装置5は、ガイド部材52が、締結対象物200とネジ締め装置4との間において、ネジ穴201の開口端部202に対向する位置に配置される。
さらに、ネジガイド装置5は、昇降アクチュエータ58により、ガイド部材52を、締結対象物200とネジ締め装置4とが対向する上下方向において、締結対象物200から離間する方向である下方に退避できるようになっている。
図8は、ネジ締めロボットシステム1でネジ100をネジ穴201に締結させるための処理の流れを示すフローチャートである。
図8に示すように、ネジ100をネジ穴201に締結させるには、まず、ネジ100を、ネジ締め装置4のソケット43にセットする(ステップS1)。これには、制御装置6により、図示しないネジ供給機構から、ネジ100を供給する。図2に示すように、ネジ100は、頭部102をソケット43内に収め、軸部101が上方に向けて延びるような状態でセットされる。
そして、図6に示すように、制御装置6により、ガイド装置本体51である開閉アクチュエータ56で、ガイド部材52を構成する一対のガイドビット54A,54Bを閉状態とする(ステップS3)。これにより、閉状態のガイド部材52に形成されるネジ挿通部53は、ネジ穴201の鉛直下方で、ネジ穴201と同軸上に配置される。
ステップS5において、ネジ100の軸部101の先端部101sがネジ穴201の雌ネジ部203に到達する位置まで、ネジ締め装置4が上昇したら、ネジ100を回転させ、ネジ締め動作を開始する。これには、ロボット3のアーム32を作動させ、ネジ締め装置4をさらに鉛直上方に移動させ、ネジ100の軸部101の先端部101sをネジ穴201の雌ネジ部203に押し付ける。この状態で、制御装置6により、ネジ締め装置4のネジ締め装置本体41を作動させてシャフト42を回転させる。
すると、図9に示すように、ネジ100の軸部101の雄ネジ部103が雌ネジ部203に螺合し始める。このネジ締め動作の開始と平行して、制御装置6は、開閉アクチュエータ56により、ガイド部材52を構成する一対のガイドビット54A,54Bを開き、開状態とする(ステップS6)。
図7に示すように、ガイドビット54A,54Bが開くと、前記したように、ネジ挿通部53において、ネジ穴201に近接した側の上端部の径寸法d1’は、ネジ100の頭部102およびソケット43の外径ds以上となる。
これにより、一つのネジ穴201へのネジ100の締結が完了する。
その結果、全てのネジ穴201へのネジ100の締結が完了していれば、制御装置6は、一連の処理を終了する。
ネジガイド装置5を次のネジ穴201に移動させるには、ネジガイド装置5において、昇降アクチュエータ58(図2参照。)で、開閉アクチュエータ56を下降させる。これにより、図10に示すように、ステップS6で開状態とされたガイド部材52が下方に移動し、締結対象物200に締結されたネジ100の頭部102よりもから下方に位置する。この状態で、支持部2のワーク支持部材24により、締結対象物200をその中心回りに回転させ、次のネジ穴201が、ガイド部材52のネジ挿通部53の鉛直上方に位置するよう相対移動させる。
その結果、ネジ締め装置4の動作の自由度が低下するのを抑えつつ、ネジ100をネジ穴201に確実に位置決めして、ネジ締め作業を行うことができる。
さらに、ネジ挿通部53は、ネジ穴201に近接した側の端部の径寸法d1が、ネジ穴201の内径dn以下である。これにより、ネジ100をネジ挿通部53に挿通させるときに、ネジ100の軸部101の先端部101sがネジ穴201の周囲で締結対象物200に引っ掛かることがなく、ネジ穴201に、より円滑かつ確実に案内される。
加えて、昇降アクチュエータ58によるガイド部材52の移動量は、少なくとも、ネジ100の頭部102の厚さ以上であればよいので、移動量が少なくて済む。したがって、ネジ100の締結作業に要するタクトタイムの短縮に寄与することができる。
例えば、図11に示すように、ガイド装置本体51に、ガイドビット54A,54Bを閉方向に付勢するバネ等の付勢部材65を備えるようにしてもよい。
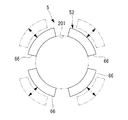
例えば、図12に示すように、ガイド部材52は、ネジ穴201の中心軸C回りの周方向に複数設けられ、それぞれが径方向に移動可能に設けられた複数の円弧形状のガイドビット66によって構成することもできる。各ガイドビット66は、アクチュエータや付勢部材の付勢力によって、ネジ穴201の径方向に移動することで、ネジ挿通部53を開閉する。
2 支持部
3 ロボット
4 ネジ締め装置
5 ネジガイド装置
6 制御装置
51 ガイド装置本体
52 ガイド部材
53 ネジ挿通部
54A,54B ガイドビット
55 ガイド面
56 開閉アクチュエータ(第一アクチュエータ)
57 径方向進退アクチュエータ(第二アクチュエータ)
58 昇降アクチュエータ(第三アクチュエータ)
65 付勢部材
100 ネジ
101 軸部
101s 先端部
102 頭部
200 締結対象物
201 ネジ穴
202 開口端部
C 中心軸
d1 径寸法
dn 内径
Claims (10)
- 締結対象物に形成されたネジ穴に対してネジ締め装置によって締結されるネジを、前記ネジ穴に案内するネジガイド装置であって、
前記締結対象物を支持する支持部側に設けられたガイド装置本体と、
前記ガイド装置本体に設けられ、前記ネジの軸部の中心軸に直交する径方向に開閉可能で、閉状態にあるときに前記軸部が挿通されるネジ挿通部を形成するガイド部材とを備えるネジガイド装置。 - 前記ガイド部材が、前記ネジの中心軸回りの周方向に複数設けられ、それぞれが前記径方向に移動可能に設けられたガイドビットからなり、
前記ネジ挿通部が、複数の前記ガイドビットに囲まれて形成される請求項1に記載のネジガイド装置。 - 前記ガイド部材が、前記締結対象物と前記ネジ締め装置との間において、前記ネジ穴の開口端部に対向する位置に配置され、
前記ガイド装置本体が、前記締結対象物と前記ネジ締め装置とが対向する方向に交差する方向において、前記締結対象物の外側に配置されている請求項1または請求項2に記載のネジガイド装置。 - 前記ガイド部材が、前記中心軸に沿って前記ネジ穴に近づくにしたがって径寸法が漸次縮小するテーパ状のガイド面を有する請求項1から請求項3のいずれかに記載のネジガイド装置。
- 前記ネジ挿通部が、前記ネジ穴に近接した側の端部の径寸法が前記ネジ穴の内径以下である請求項4に記載のネジガイド装置。
- 前記ガイド装置本体が、前記ガイド部材を前記径方向に開閉駆動させる第一アクチュエータである請求項1から請求項5のいずれかに記載のネジガイド装置。
- 前記ガイド部材を閉方向に付勢する付勢部材を備える請求項1から請求項6のいずれかに記載のネジガイド装置。
- 前記ガイド部材を、前記締結対象物と前記ネジ締め装置とが対向する方向に交差する方向において、前記締結対象物と前記ネジ締め装置との間から退避させる第二アクチュエータを備える請求項1から請求項7のいずれかに記載のネジガイド装置。
- 前記ガイド部材を、前記締結対象物と前記ネジ締め装置とが対向する方向において、前記締結対象物から離間する方向に退避させる第三アクチュエータを備える請求項1から請求項8のいずれかに記載のネジガイド装置。
- 請求項1から請求項9のいずれかに記載のネジガイド装置と、
前記ネジ穴を有する前記締結対象物を支持する支持部と、
前記締結対象物に対して移動可能に設けられたアームを有するロボットと、
前記アームの先端に取り付けられ、前記締結対象物の前記ネジ穴に対して前記ネジを締結する前記ネジ締め装置と、
前記ロボット、前記ネジ締め装置および前記ネジガイド装置を制御する制御装置とを備えるネジ締めロボットシステム。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017100344A JP6506344B2 (ja) | 2017-05-19 | 2017-05-19 | ネジガイド装置およびネジ締めロボットシステム |
| US15/945,054 US11260481B2 (en) | 2017-05-19 | 2018-04-04 | Screw guide device and screw-fastening robot system |
| DE102018111462.1A DE102018111462B4 (de) | 2017-05-19 | 2018-05-14 | Schraubenführungsvorrichtung und Schraubenbefestigungs-Robotersystem |
| CN201810461657.6A CN108942187B (zh) | 2017-05-19 | 2018-05-15 | 螺钉引导装置以及螺钉紧固机器人系统 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017100344A JP6506344B2 (ja) | 2017-05-19 | 2017-05-19 | ネジガイド装置およびネジ締めロボットシステム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018192591A true JP2018192591A (ja) | 2018-12-06 |
| JP6506344B2 JP6506344B2 (ja) | 2019-04-24 |
Family
ID=64270419
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017100344A Active JP6506344B2 (ja) | 2017-05-19 | 2017-05-19 | ネジガイド装置およびネジ締めロボットシステム |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US11260481B2 (ja) |
| JP (1) | JP6506344B2 (ja) |
| CN (1) | CN108942187B (ja) |
| DE (1) | DE102018111462B4 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102347437B1 (ko) | 2020-10-28 | 2022-01-04 | 고려대학교 산학협력단 | 체결 기능을 갖는 그리퍼 |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20210245338A1 (en) * | 2020-02-07 | 2021-08-12 | Raytheon Company | Fastener insertion system |
| US11571788B2 (en) | 2020-11-11 | 2023-02-07 | International Business Machines Corporation | Adjustable suction screwdriver |
| US11385614B2 (en) * | 2020-11-11 | 2022-07-12 | International Business Machines Corporation | Guided driver device |
| EP4029644B1 (en) | 2021-01-19 | 2023-07-19 | Volvo Truck Corporation | A robot for tightening a series of bolt nuts on a vehicle chassis and manufacturing process |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62127737U (ja) * | 1986-02-04 | 1987-08-13 | ||
| JP2012210678A (ja) * | 2011-03-31 | 2012-11-01 | Aisin Aw Co Ltd | ボルト締付装置 |
| WO2013005330A1 (ja) * | 2011-07-07 | 2013-01-10 | 株式会社安川電機 | エンドエフェクタおよびロボット |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3056441A (en) * | 1959-05-07 | 1962-10-02 | Paul E Helms | Screw holder and driver |
| US3233752A (en) * | 1964-06-29 | 1966-02-08 | Western Electric Co | Automatic positioning and orienting apparatus |
| US4260940A (en) * | 1975-10-28 | 1981-04-07 | Unimation, Inc. | Programmable automatic assembly system |
| JPS6397857A (ja) * | 1986-10-09 | 1988-04-28 | Gadelius Kk | シリンダ−ヘツドへのボルト挿入方法および装置 |
| US5733089A (en) * | 1995-10-05 | 1998-03-31 | Air Way Automation, Inc. | Nosepiece/receiver for automated fastener system |
| JP3266040B2 (ja) | 1997-03-12 | 2002-03-18 | 三菱自動車工業株式会社 | ボルト挿入装置 |
| JP4541091B2 (ja) * | 2004-10-04 | 2010-09-08 | 本田技研工業株式会社 | 加工搬送装置 |
| JP2008254100A (ja) | 2007-04-03 | 2008-10-23 | Yamaha Corp | ネジ取付作業用治具 |
| JP2008302482A (ja) | 2007-06-11 | 2008-12-18 | Ricoh Co Ltd | ねじ締め装置 |
| JP2009241227A (ja) * | 2008-03-31 | 2009-10-22 | Honda Motor Co Ltd | ワーク取付システムおよびワーク取付方法 |
| US9299209B2 (en) * | 2013-03-14 | 2016-03-29 | Honda Motor Co., Ltd. | Super high speed bolt delivery system |
| JP5951552B2 (ja) * | 2013-04-19 | 2016-07-13 | Thk株式会社 | ハンド |
| US10118714B2 (en) * | 2014-04-30 | 2018-11-06 | The Boeing Company | System and method for positioning an automated assembly tool relative to a structure |
| CN204449863U (zh) * | 2015-03-06 | 2015-07-08 | 翰桥(湖州)五金制品有限公司 | 用于复杂汽车配件的紧密旋紧装置 |
| CN205043445U (zh) * | 2015-09-14 | 2016-02-24 | 诺基亚通信(上海)有限公司 | 螺丝动态锁定装置 |
-
2017
- 2017-05-19 JP JP2017100344A patent/JP6506344B2/ja active Active
-
2018
- 2018-04-04 US US15/945,054 patent/US11260481B2/en active Active
- 2018-05-14 DE DE102018111462.1A patent/DE102018111462B4/de active Active
- 2018-05-15 CN CN201810461657.6A patent/CN108942187B/zh active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62127737U (ja) * | 1986-02-04 | 1987-08-13 | ||
| JP2012210678A (ja) * | 2011-03-31 | 2012-11-01 | Aisin Aw Co Ltd | ボルト締付装置 |
| WO2013005330A1 (ja) * | 2011-07-07 | 2013-01-10 | 株式会社安川電機 | エンドエフェクタおよびロボット |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102347437B1 (ko) | 2020-10-28 | 2022-01-04 | 고려대학교 산학협력단 | 체결 기능을 갖는 그리퍼 |
Also Published As
| Publication number | Publication date |
|---|---|
| US11260481B2 (en) | 2022-03-01 |
| DE102018111462A1 (de) | 2018-11-22 |
| US20180333811A1 (en) | 2018-11-22 |
| DE102018111462B4 (de) | 2020-11-26 |
| JP6506344B2 (ja) | 2019-04-24 |
| CN108942187A (zh) | 2018-12-07 |
| CN108942187B (zh) | 2019-07-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2018192591A (ja) | ネジガイド装置およびネジ締めロボットシステム | |
| JP6487373B2 (ja) | ワーク固定装置 | |
| US9782863B2 (en) | Screw tightening apparatus | |
| JP6367859B2 (ja) | ネジ締めロボットシステム | |
| US8979151B2 (en) | Robot hand for handling workpiece in high temperature area | |
| JP7132696B2 (ja) | 軌道穿孔システム並びに関連する方法及び装置 | |
| CA2952813A1 (en) | Apparatus for cutting material and method | |
| US20120285015A1 (en) | Retainer assembling apparatus and retainer assembling method | |
| JPWO2013088884A1 (ja) | 工作機械 | |
| KR101969499B1 (ko) | 딥홀 가공장치 | |
| WO2012143969A1 (ja) | ピストン供給装置及びピストン供給方法 | |
| JP4839829B2 (ja) | ワーク位置決め装置 | |
| JP4817011B2 (ja) | 内歯シェービング装置 | |
| JP6156105B2 (ja) | 電動ドライバ装置 | |
| JP2021528260A (ja) | フライス加工及び深穴加工機 | |
| JP5700788B2 (ja) | 部品組立機及び部品組立方法 | |
| KR20090064782A (ko) | 공작기계의 툴 매거진 | |
| US6276245B1 (en) | Bar work loading apparatus for head traveling type vertical machine tool and bar work loading method for use in head traveling type vertical machine tool | |
| WO2017043397A1 (ja) | パレット搬送装置 | |
| JP2011523900A (ja) | Tem機の加工チャンバ装置用の新規な方法及びローダ装置 | |
| KR101681215B1 (ko) | 핫스탬핑 금형 제조용 다축 가공장치를 이용한 핫스탬핑 금형 제조방법 | |
| JP2008173679A (ja) | 溶接トーチの移動装置 | |
| JP4969406B2 (ja) | スライド上下位置調整機構 | |
| JP2020093322A (ja) | 工具交換装置 | |
| GB2477399A (en) | Panel loading method and panel-loading support device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20180829 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20180903 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20181009 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20181218 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190214 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190305 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190328 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6506344 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |