JP2018092319A - サーボモータ制御装置、サーボモータ制御方法、及びサーボモータ制御用プログラム - Google Patents
サーボモータ制御装置、サーボモータ制御方法、及びサーボモータ制御用プログラム Download PDFInfo
- Publication number
- JP2018092319A JP2018092319A JP2016234232A JP2016234232A JP2018092319A JP 2018092319 A JP2018092319 A JP 2018092319A JP 2016234232 A JP2016234232 A JP 2016234232A JP 2016234232 A JP2016234232 A JP 2016234232A JP 2018092319 A JP2018092319 A JP 2018092319A
- Authority
- JP
- Japan
- Prior art keywords
- value
- servo motor
- force
- position command
- estimated value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images














Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Programme-control systems
- G05B19/02—Programme-control systems electric
- G05B19/18—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of programme data in numerical form
- G05B19/414—Structure of the control system, e.g. common controller or multiprocessor systems, interface to servo, programmable interface controller
- G05B19/4142—Structure of the control system, e.g. common controller or multiprocessor systems, interface to servo, programmable interface controller characterised by the use of a microprocessor
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Programme-control systems
- G05B19/02—Programme-control systems electric
- G05B19/18—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of programme data in numerical form
- G05B19/404—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of programme data in numerical form characterised by control arrangements for compensation, e.g. for backlash, overshoot, tool offset, tool wear, temperature, machine construction errors, load, inertia
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/02—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing characterised by the signals used
- F16H61/0202—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing characterised by the signals used the signals being electric
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B11/00—Automatic controllers
- G05B11/01—Automatic controllers electric
- G05B11/011—Automatic controllers electric details of the correcting means
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/34—Director, elements to supervisory
- G05B2219/34013—Servocontroller
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/41—Servomotor, servo controller till figures
- G05B2219/41129—Force compensation for non linearity of system
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/41—Servomotor, servo controller till figures
- G05B2219/41138—Torque compensation
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/41—Servomotor, servo controller till figures
- G05B2219/41164—How to compensate, for example by injecting compensation signal in comparator of normal loop
Abstract
【解決手段】サーボモータと、サーボモータにより駆動される被駆動体と、サーボモータの動力を被駆動体へ伝える連結機構と、被駆動体の位置指令値を生成する位置指令生成部と、位置指令値を用いてサーボモータを制御するモータ制御部と、連結機構との連結部において記被駆動体に作用する駆動力である第1の力推定値を推定する第1の力推定部と、固定値となる第2の力推定値を推定する第2の力推定部と、第1の力推定値の絶対値と、第2の力推定値の絶対値とを比較して、絶対値が大きい方の第1又は第2の力推定値を出力する選択部と、選択部から出力された第1又は第2の力推定値に基づき、位置指令値を補正するため補正量を生成する補正量生成部と、を具備する。
【選択図】図3
Description
このようなサーボモータ制御装置において、サーボモータの動力により駆動する被駆動体(移動体ともいう)の位置を補正する機能を有するサーボモータ制御装置がある。
本発明は、工作機械や産業機械において、さらに精度の高い被駆動体の位置制御が可能なサーボモータ制御装置、サーボモータ制御方法、及びサーボモータ制御用プログラムを提供することを目的とする。
前記サーボモータにより駆動される被駆動体と、
前記サーボモータと前記被駆動体とを連結し、前記サーボモータの動力を前記被駆動体へ伝える連結機構と、
前記被駆動体の位置指令値を生成する位置指令生成部と、
前記位置指令値を用いて前記サーボモータを制御するモータ制御部と、
前記連結機構との連結部において前記被駆動体に作用する駆動力である第1の力推定値を推定する第1の力推定部と、
固定値となる第2の力推定値を推定する第2の力推定部と、
前記第1の力推定値の絶対値と、前記第2の力推定値の絶対値とを比較して、絶対値が大きい方の前記第1又は第2の力推定値を出力する選択部と、
前記選択部から出力された前記第1又は第2の力推定値に基づき、前記位置指令生成部により生成された前記位置指令値を補正するため補正量を生成する補正量生成部と、
を具備するサーボモータ制御装置である。
前記補正量生成部は、前記選択部から出力された前記第1又は第2の力推定値と第1の係数との積と、前記選択部から出力された前記第1又は第2の力推定値と前記サーボモータから前記連結部までの距離と第2の係数との積と、の和を前記補正量とすることが望ましい。
(3)上記(1)又は(2)のサーボ制御装置において、前記第2の力推定値は、推定する前記被駆動体に作用する駆動力を、前記位置指令生成部で作成された位置指令の方向に対応する符号のあらかじめ定めた一定値であることが望ましい。
(4)上記(1)から(3)のいずれか2)のサーボ制御装置において、前記第2の力推定値は、あらかじめ定めた一定値、若しくは前記位置指令生成部が作成した前記位置指令の指令速度又は指令加速度が所望の値以下の時に前記第1の力推定部にて推定された第1の力推定値の固定値とすることが望ましい。
(5)上記(1)から(4)のいずれかのサーボ制御装置において、前記位置指令生成部により生成された位置指令値の指令速度若しくは指令加速度が所望の値を超える場合に、前記選択部から出力された値から前記第1の力推定部で推定した第1の力推定値に切り替える切り替え部を具備することが望ましい。
(6)上記(1)から(5)のいずれかのサーボ制御装置において、前記選択部又は前記切り替え部により、前記第2の力推定値から前記第1の力推定値又は前記第1の力推定値から前記第2の力推定値に切り替えるときに、前記補正量生成部が生成した前記補正量にフィルタをかけることが望ましい。
(7)上記(1)から(6)のいずれかのサーボ制御装置において、前記モータ制御部は、速度指令作成部とトルク指令作成部とを有し、
前記トルク指令作成部は少なくとも速度偏差を積算する積分器を有し、
前記選択部又は前記切り替え部により、前記第2の力推定値から前記第1の力推定値又は前記第1の力推定値から前記第2の力推定値に切り替えるときに、前記積分器の書き替えを行うことが望ましい。
前記サーボモータにより駆動される被駆動体と、
前記サーボモータと前記被駆動体とを連結し、前記サーボモータの動力を前記被駆動体へ伝える連結機構と、を備えたサーボモータ制御装置のサーボモータ制御方法において、
前記被駆動体の位置指令値を生成し、
前記連結機構との連結部において前記被駆動体に作用する駆動力である第1の力推定値を推定し、
推定した前記第1の力推定値の絶対値と、固定値の第2の力推定値の絶対値とを比較して、絶対値が大きい方の前記第1又は第2の力推定値を選択し、
選択された前記第1又は第2の力推定値に基づき、生成された前記位置指令値を補正し、
補正された前記位置指令値を用いて前記サーボモータを制御するサーボモータ制御方法である。
(9)上記(8)のサーボモータ制御方法において、前記位置指令値を補正するための位置指令補正値は、選択された前記第1又は第2の力推定値と第1の係数との積と、選択された前記第1又は第2の力推定値と前記サーボモータから前記連結部までの距離と第2の係数との積と、の和であることが望ましい。
(10)上記(8)又は(9)のサーボモータ制御方法において、前記第2の力推定値は、推定する前記被駆動体に作用する駆動力を、位置指令の方向に対応する符号のあらかじめ定めた一定値であることが望ましい。
(11)上記(8)から(10)のいずれかのサーボモータ制御方法において、前記第2の力推定値は、あらかじめ定めた一定値、若しくは前記位置指令の指令速度又は指令加速度が所望の値以下の時に推定された第1の力推定値の固定値とすることが望ましい。
(12)上記(8)から(11)のいずれかのサーボモータ制御方法において、生成された位置指令値の指令速度若しくは指令加速度が所望の値を超える場合に、前記選択された力推定値から前記第1の力推定値に切り替えることが望ましい。
(13)上記(8)から(12)のいずれかのサーボモータ制御方法において、前記第2の力推定値から前記第1の力推定値又は前記第1の力推定値から前記第2の力推定値に切り替えるときに、前記位置指令値の補正値にフィルタをかけることが望ましい。
(14)上記(8)から(13)のいずれかのサーボモータ制御方法において、補正された前記位置指令値を用いて速度指令を作成し、作成された速度指令を用いてトルク指令を作成し、該トルク指令を用いて前記サーボモータを制御し、
前記トルク指令の作成は少なくとも速度偏差を積算する積分器を用いて行い、
前記第2の力推定値から前記第1の力推定値又は前記第1の力推定値から前記第2の力推定値に切り替えるときに、前記積分器の書き換えを行うことが望ましい。
前記サーボモータにより駆動される被駆動体と、
前記サーボモータと前記被駆動体とを連結し、前記サーボモータの動力を前記被駆動体へ伝える連結機構と、を備えたサーボモータ制御装置のサーボモータ制御をコンピュータに実行させるサーボモータ制御用プログラムであって、
前記コンピュータに、
前記被駆動体の位置指令値を生成する処理と、
前記連結機構との連結部において前記被駆動体に作用する駆動力である第1の力推定値を推定する処理と、
推定した前記第1の力推定値の絶対値と、固定値の第2の力推定値の絶対値とを比較して、絶対値が大きい方の前記第1又は第2の力推定値を選択する処理と、
選択された前記第1又は第2の力推定値に基づき、生成された前記位置指令値を補正する処理と、
補正された前記位置指令値を用いて前記サーボモータを制御する処理と、
を実行させるサーボモータ制御用プログラムである。
まず、本発明の実施形態の説明に先立って前提技術となるサーボモータ制御装置について説明する。
図1は前提技術となるサーボモータ制御装置の構成を示すブロック図である。サーボモータ制御装置は、サーボモータ50で連結機構60を介してテーブル70を移動させ、テーブル70の上に搭載された被加工物(ワーク)を加工する。連結機構60は、サーボモータ50に連結されたカップリング601と、カップリング601に固定されるボールねじ602とを有し、ボールねじ602にナット603が螺合されている。サーボモータ50の回転駆動によって、ボールねじ602に螺着されたナット603がボールねじ602の軸方向に移動する。
サーボモータ制御装置は、図示しない上位制御装置や外部入力装置等から入力されるプログラムや命令に従って、サーボモータ50の位置指令値を作成する位置指令作成部10と、位置指令作成部10が作成した位置指令値とエンコーダ40が検出した位置検出値との差を求める減算器80と、この差と位置指令補正部30から出力される補正値とを加算する加算器90と、この加算値を用いてサーボモータ50のトルク指令値を作成するモータ制御部20と、を有する。
位置指令補正部30は、補正量生成部301と力推定部302とを有する。力推定部302は、トルク指令値を用いて連結部において駆動体に作用する駆動力(駆動トルク)を推定する。補正量生成部301は、力推定部302により推定された駆動力に基づき、位置指令生成部10により生成された位置指令値を補正するための補正量を生成し補正値を出力する。
図3は本発明の第1の実施形態となるサーボモータ制御装置の構成を示すブロック図である。図3において、図1のサーボモータ制御装置の構成部材と同一構成部材については同一符号を付して説明を省略する。
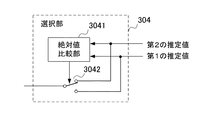
図3に示すように、本実施形態では、位置指令補正部31は図1に示した位置指令補正部30に比べて、力推定部303及び選択部304を備えている。
力推定部302は、既に説明したように、モータ制御部20から出力されるトルク指令値を用いて連結部において駆動体に作用する駆動力(駆動トルク)を推定して出力する。この推定した負荷トルクの値が第1の推定値である。なお、駆動力の推定はこれに限定されず、例えば特許文献1(特開2014−109785号公報)に記載されるように、加減速トルク、外乱トルク等をさらに加えて駆動力を推定したり、トルク指令値でなく、モータ電流を検出する電流検出部の出力を用いてモータトルクを算出して駆動力を推定してもよい。
絶対値比較部3041は比較結果により第1の推定値の絶対値が大きい場合は第1の推定値に切り替え、第2の推定値の絶対値が大きい場合は第2の推定値に切り替えるように切り替え信号をスイッチ3042に送る。
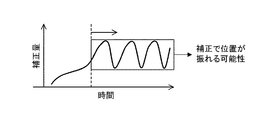
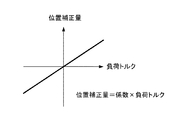
図1に示すサーボモータ制御装置は、ボールネジの長さの影響を考慮しない場合には、図5に示すように負荷トルクと補正量とが比例関係にあり、指令の停止時に負荷トルクに変化があった際に、位置補正量も変化してしまう。
第2の推定値が条件(位置指令値の指令速度又は指令加速度が所望の値以下)を満たした際の推定負荷トルクの場合、条件を満たした際の推定負荷トルクから定まる実線の特性(図6)で補正を行う。位置指令値の指令速度、指令加速度が所望の値を超え、再び所望の値以下となった場合に第2の推定値は更新される。
第2の推定値があらかじめ定めた一定値の場合は、この一定値より定まる実線の特性(図6)で補正を行う。
停止時(又は低速時)においても、補正量そのものではなく、推定負荷トルクを固定化することにより、ボールねじの長さに対するボールねじの弾性変形量の変化(ボールねじが長い(被駆動体までの距離が遠い)場合はねじれ量が増える、短い場合はねじれ量が減る)を補正に反映することができる。
補正量の計算は、(補正量)={(形状係数×ボールねじの長さ)+ねじれ係数}}×(推定負荷トルク)であり、推定負荷トルクを固定値に切り替えても、ボールねじの長さに依存した補正がかかることになる。
ボールねじの長さdはサーボモータから連結機構までのボールねじの長さであり、テーブルの位置により変わる。
(第2の実施形態)
図12は本発明の第2の実施形態となるサーボモータ制御装置の構成を示すブロック図である。
図12に示すように、本実施形態のサーボモータ制御装置では、位置指令補正部32は、図3に示したサーボモータ制御装置の位置指令補正部31に切り替え部となるスイッチ310が追加され、スイッチ310は、位置指令作成部10が作成した位置指令値を受けて、位置指令値の指令速度(位置指令速度)を生成する位置指令速度判断部120によって切り替えられる。
本実施形態では、指令速度(絶対値)が所望の値を超えるときには、低負荷トルクのときでもクランプされないようにすることができる。
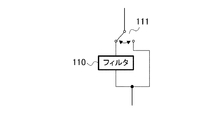
第1の実施形態のサーボモータ制御装置では、選択部304で第2の推定値から第1の推定値(推定負荷トルク)、又は第1の推定値から第2の推定値に切り替えると、切り替え時に補正量が不連続に変わる場合がある。不連続な補正量は不連続な速度指令になり、不連続なトルク指令を生じさせる。この補正量の不連続を防止するために位置指令補正部31の出力にフィルタ110を設ける。補正量をローパスフィルタに通すことで、不連続な値を緩やかに追従させることができる。
図13は本発明の第3の実施形態となるサーボモータ制御装置の構成を示すブロック図である。図13のサーボモータ制御装置の構成は、フィルタ110が設けられている点を除くと図3のサーボモータ制御装置の構成と同じであり、同一の構成部材については同一符号を付し説明を省略する。フィルタ110としてはローパスフィルタを用いることができる。
図15はフィルタ110の切り替え動作を示すフローチャートである。ステップS201で選択部304により第2の推定値から第1の推定値に切り替えられる場合に(ステップS201のYES)、ステップ202で、フィルタをかけるように切り替えスイッチ111を切り替え、その後、補正量の不連続が解消されたときに、ステップ203でフィルタをかけないように切り替えスイッチ111を切り替える。図15では選択部304により第2の推定値から第1の推定値に切り替えられる場合について説明したが、選択部304により第1の推定値から第2の推定値に切り替えられる場合には、ステップ201で選択部304により第1の推定値から第2の推定値に切り替えられたかどうかを判断する。
第3の実施形態のサーボモータ制御装置では、補正量の不連続を防止するために位置指令補正部31の出力にフィルタ110を設けたが、フィルタの代わりに図10に示すトルク指令作成部202の積分器2021の書き換えを行い、トルク指令値が連続になるようにしてもよい。本実施形態において、積分器2021の書き換えとともに位置指令補正部31の出力にフィルタ110を設けてもよい。選択部304で第2の推定値から第1の推定値(推定負荷トルク)、又は第1の推定値から第2の推定値に切り替えたときに位置指令値を補正する補正量が入ると、速度指令値の変化が発生する。この速度指令値の変化によりトルク指令値が変化しないように、積分器の書き換えを行い、トルク指令値が連続になるようにする。
トルク指令値TCMDは、Vcmdを速度指令値、Vfbを検出速度、kpを比例ゲイン、kiを積分ゲインとすると、

あらかじめ定めた一定値、又は位置指令値の条件を満たした際の負荷トルクの値のどちらを第2の推定値としても、ある大きさのトルク以下の変化を補正に影響させない不感帯の役目がある。図12に示したスイッチ310のような切り替え部を具備する場合は、位置指令の指令速度、指令加速度が所望の値以下となった場合のみの不感帯として働く。
こうして、各実施形態では、サーボモータの動作に関係しない補正量を印加せず、ロストモーションに対する補正のみを行うことができる。補正量にボールネジの長さに対する依存性を待たせることができる。
20 モータ制御部
30、31、32 位置指令補正部
40 エンコーダ
50 サーボモータ
60 連結機構
70 テーブル
301 補正量生成部
302、303 力推定部
304 選択部
310 スイッチ
Claims (15)
- サーボモータと、
前記サーボモータにより駆動される被駆動体と、
前記サーボモータと前記被駆動体とを連結し、前記サーボモータの動力を前記被駆動体へ伝える連結機構と、
前記被駆動体の位置指令値を生成する位置指令生成部と、
前記位置指令値を用いて前記サーボモータを制御するモータ制御部と、
前記連結機構との連結部において前記被駆動体に作用する駆動力である第1の力推定値を推定する第1の力推定部と、
固定値となる第2の力推定値を推定する第2の力推定部と、
前記第1の力推定値の絶対値と、前記第2の力推定値の絶対値とを比較して、絶対値が大きい方の前記第1又は第2の力推定値を出力する選択部と、
前記選択部から出力された前記第1又は第2の力推定値に基づき、前記位置指令生成部により生成された前記位置指令値を補正するため補正量を生成する補正量生成部と、
を具備するサーボモータ制御装置。 - 前記補正量生成部は、前記選択部から出力された前記第1又は第2の力推定値と第1の係数との積と、前記選択部から出力された前記第1又は第2の力推定値と前記サーボモータから前記連結部までの距離と第2の係数との積と、の和を前記補正量とする請求項1に記載のサーボモータ制御装置。
- 前記第2の力推定値は、推定する前記被駆動体に作用する駆動力を、前記位置指令生成部で作成された位置指令の方向に対応する符号のあらかじめ定めた一定値である請求項1又は2に記載のサーボモータ制御装置。
- 前記第2の力推定値は、あらかじめ定めた一定値、若しくは前記位置指令生成部が作成した前記位置指令の指令速度又は指令加速度が所望の値以下の時に前記第1の力推定部にて推定された第1の力推定値の固定値とする請求項1から3のいずれか1項に記載のサーボモータ制御装置。
- 前記位置指令生成部により生成された位置指令値の指令速度若しくは指令加速度が所望の値を超える場合に、前記選択部から出力された値から前記第1の力推定部で推定した第1の力推定値に切り替える切り替え部を具備する請求項1から4のいずれか1項に記載のサーボモータ制御装置。
- 前記選択部又は前記切り替え部により、前記第2の力推定値から前記第1の力推定値又は前記第1の力推定値から前記第2の力推定値に切り替えるときに、前記補正量生成部が生成した前記補正量にフィルタをかける請求項1から5のいずれか1項に記載のサーボモータ制御装置。
- 前記モータ制御部は、速度指令作成部とトルク指令作成部とを有し、
前記トルク指令作成部は少なくとも速度偏差を積算する積分器を有し、
前記選択部又は前記切り替え部により、前記第2の力推定値から前記第1の力推定値又は前記第1の力推定値から前記第2の力推定値に切り替えるときに、前記積分器の書き替えを行う請求項1から6のいずれか1項に記載のサーボモータ制御装置。 - サーボモータと、
前記サーボモータにより駆動される被駆動体と、
前記サーボモータと前記被駆動体とを連結し、前記サーボモータの動力を前記被駆動体へ伝える連結機構と、を備えたサーボモータ制御装置のサーボモータ制御方法において、
前記被駆動体の位置指令値を生成し、
前記連結機構との連結部において前記被駆動体に作用する駆動力である第1の力推定値を推定し、
推定した前記第1の力推定値の絶対値と、固定値の第2の力推定値の絶対値とを比較して、絶対値が大きい方の前記第1又は第2の力推定値を選択し、
選択された前記第1又は第2の力推定値に基づき、生成された前記位置指令値を補正し、
補正された前記位置指令値を用いて前記サーボモータを制御するサーボモータ制御方法。 - 前記位置指令値を補正するための位置指令補正値は、選択された前記第1又は第2の力推定値と第1の係数との積と、選択された前記第1又は第2の力推定値と前記サーボモータから前記連結部までの距離と第2の係数との積と、の和である請求項8に記載のサーボモータ制御方法。
- 前記第2の力推定値は、推定する前記被駆動体に作用する駆動力を、位置指令の方向に対応する符号のあらかじめ定めた一定値である請求項8又は9に記載のサーボモータ制御方法。
- 前記第2の力推定値は、あらかじめ定めた一定値、若しくは前記位置指令の指令速度又は指令加速度が所望の値以下の時に推定された第1の力推定値の固定値とする請求項8から10のいずれか1項に記載のサーボモータ制御装置。
- 生成された位置指令値の指令速度若しくは指令加速度が所望の値を超える場合に、前記選択された力推定値から前記第1の力推定値に切り替える請求項8から11のいずれか1項に記載のサーボモータ制御装置。
- 前記第2の力推定値から前記第1の力推定値又は前記第1の力推定値から前記第2の力推定値に切り替えるときに、前記位置指令値の補正値にフィルタをかける請求項8から12のいずれか1項に記載のサーボモータ制御方法。
- 補正された前記位置指令値を用いて速度指令を作成し、作成された速度指令を用いてトルク指令を作成し、該トルク指令を用いて前記サーボモータを制御し、
前記トルク指令の作成は少なくとも速度偏差を積算する積分器を用いて行い、
前記第2の力推定値から前記第1の力推定値又は前記第1の力推定値から前記第2の力推定値に切り替えるときに、前記積分器の書き換えを行う請求項8から13のいずれか1項に記載のサーボモータ制御方法。 - サーボモータと、
前記サーボモータにより駆動される被駆動体と、
前記サーボモータと前記被駆動体とを連結し、前記サーボモータの動力を前記被駆動体へ伝える連結機構と、を備えたサーボモータ制御装置のサーボモータ制御をコンピュータに実行させるサーボモータ制御用プログラムであって、
前記コンピュータに、
前記被駆動体の位置指令値を生成する処理と、
前記連結機構との連結部において前記被駆動体に作用する駆動力である第1の力推定値を推定する処理と、
推定した前記第1の力推定値の絶対値と、固定値の第2の力推定値の絶対値とを比較して、絶対値が大きい方の前記第1又は第2の力推定値を選択する処理と、
選択された前記第1又は第2の力推定値に基づき、生成された前記位置指令値を補正する処理と、
補正された前記位置指令値を用いて前記サーボモータを制御する処理と、
を実行させるサーボモータ制御用プログラム。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016234232A JP6370866B2 (ja) | 2016-12-01 | 2016-12-01 | サーボモータ制御装置、サーボモータ制御方法、及びサーボモータ制御用プログラム |
| DE102017221238.1A DE102017221238B4 (de) | 2016-12-01 | 2017-11-28 | Servomotor-steuereinrichtung, servomotor-steuerverfahren und servomotor-steuerprogramm |
| US15/825,650 US10175676B2 (en) | 2016-12-01 | 2017-11-29 | Servomotor controller, servomotor control method, and computer-readable recording medium |
| CN201711229084.6A CN108132649B (zh) | 2016-12-01 | 2017-11-29 | 伺服电动机控制装置、伺服电动机控制方法及记录介质 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016234232A JP6370866B2 (ja) | 2016-12-01 | 2016-12-01 | サーボモータ制御装置、サーボモータ制御方法、及びサーボモータ制御用プログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018092319A true JP2018092319A (ja) | 2018-06-14 |
| JP6370866B2 JP6370866B2 (ja) | 2018-08-08 |
Family
ID=62163843
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016234232A Active JP6370866B2 (ja) | 2016-12-01 | 2016-12-01 | サーボモータ制御装置、サーボモータ制御方法、及びサーボモータ制御用プログラム |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US10175676B2 (ja) |
| JP (1) | JP6370866B2 (ja) |
| CN (1) | CN108132649B (ja) |
| DE (1) | DE102017221238B4 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020055062A (ja) * | 2018-10-01 | 2020-04-09 | 日本電産株式会社 | 補正システム、工作機械及び補正方法 |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6568147B2 (ja) * | 2017-06-06 | 2019-08-28 | ファナック株式会社 | サーボモータ制御装置 |
| JP6568148B2 (ja) * | 2017-06-06 | 2019-08-28 | ファナック株式会社 | サーボモータ制御装置 |
| DE112018007736T5 (de) * | 2018-06-15 | 2021-03-04 | Mitsubishi Electric Corporation | Numerische Steuervorrichtung |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08110808A (ja) * | 1994-10-12 | 1996-04-30 | Makino Milling Mach Co Ltd | 数値制御工作機械の制御方法及び装置 |
| JP2002297241A (ja) * | 2001-03-30 | 2002-10-11 | Toshiba Mach Co Ltd | 位置制御装置および位置制御方法 |
| JP2014109785A (ja) * | 2012-11-30 | 2014-06-12 | Fanuc Ltd | 被駆動体の位置補正機能を有するサーボ制御装置 |
| JP2018060333A (ja) * | 2016-10-04 | 2018-04-12 | ファナック株式会社 | サーボモータ制御装置、サーボモータ制御方法、及びサーボモータ制御用プログラム |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0667716A (ja) * | 1992-08-19 | 1994-03-11 | Mitsubishi Electric Corp | 数値制御装置並びに数値制御方法 |
| KR0168068B1 (ko) * | 1992-10-19 | 1999-03-20 | 윤종용 | 위치제어시스템의 위치정보 판별장치 및 그 판별방법 |
| JP3703664B2 (ja) * | 1998-12-28 | 2005-10-05 | 三菱電機株式会社 | バックラッシ補正装置 |
| EP1302830A1 (en) * | 2001-04-26 | 2003-04-16 | Mitsubishi Denki Kabushiki Kaisha | Control device-built-in cylinder servo motor |
| JP2006085272A (ja) * | 2004-09-14 | 2006-03-30 | Yaskawa Electric Corp | 速度制御装置および位置制御装置の制御方法 |
| JP4478584B2 (ja) * | 2005-01-17 | 2010-06-09 | 株式会社ミツトヨ | 位置制御装置、測定装置および加工装置 |
| JP2006215626A (ja) * | 2005-02-01 | 2006-08-17 | Okuma Corp | 位置制御装置 |
| JP4944806B2 (ja) * | 2007-10-09 | 2012-06-06 | オークマ株式会社 | 位置制御装置 |
| JP5411978B2 (ja) | 2012-06-04 | 2014-02-12 | ファナック株式会社 | ボールネジの伸縮量を補正する機能を備えたサーボ制御装置 |
| JP5667147B2 (ja) | 2012-10-30 | 2015-02-12 | ファナック株式会社 | ボールねじの伸縮量に基づいて補正処理を実行するサーボ制御装置 |
-
2016
- 2016-12-01 JP JP2016234232A patent/JP6370866B2/ja active Active
-
2017
- 2017-11-28 DE DE102017221238.1A patent/DE102017221238B4/de active Active
- 2017-11-29 CN CN201711229084.6A patent/CN108132649B/zh active Active
- 2017-11-29 US US15/825,650 patent/US10175676B2/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08110808A (ja) * | 1994-10-12 | 1996-04-30 | Makino Milling Mach Co Ltd | 数値制御工作機械の制御方法及び装置 |
| JP2002297241A (ja) * | 2001-03-30 | 2002-10-11 | Toshiba Mach Co Ltd | 位置制御装置および位置制御方法 |
| JP2014109785A (ja) * | 2012-11-30 | 2014-06-12 | Fanuc Ltd | 被駆動体の位置補正機能を有するサーボ制御装置 |
| JP2018060333A (ja) * | 2016-10-04 | 2018-04-12 | ファナック株式会社 | サーボモータ制御装置、サーボモータ制御方法、及びサーボモータ制御用プログラム |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020055062A (ja) * | 2018-10-01 | 2020-04-09 | 日本電産株式会社 | 補正システム、工作機械及び補正方法 |
| JP7091984B2 (ja) | 2018-10-01 | 2022-06-28 | 日本電産株式会社 | 補正システム、工作機械及び補正方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| US10175676B2 (en) | 2019-01-08 |
| CN108132649B (zh) | 2019-07-30 |
| JP6370866B2 (ja) | 2018-08-08 |
| CN108132649A (zh) | 2018-06-08 |
| DE102017221238A1 (de) | 2018-06-07 |
| US20180157236A1 (en) | 2018-06-07 |
| DE102017221238B4 (de) | 2020-07-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6457569B2 (ja) | サーボモータ制御装置、サーボモータ制御方法、及びサーボモータ制御用プログラム | |
| JP5411978B2 (ja) | ボールネジの伸縮量を補正する機能を備えたサーボ制御装置 | |
| JP6370866B2 (ja) | サーボモータ制御装置、サーボモータ制御方法、及びサーボモータ制御用プログラム | |
| KR100914349B1 (ko) | 서보모터의 제어방법 | |
| JP5596093B2 (ja) | バックラッシを補正するモータ制御装置 | |
| JP5628940B2 (ja) | バックラッシを補正するモータ制御装置 | |
| JP5890473B2 (ja) | モータを制御するモータ制御装置 | |
| KR20150119065A (ko) | 서보 제어 장치 | |
| JP5183399B2 (ja) | 数値制御装置 | |
| JP6464226B2 (ja) | 電動機の制御装置 | |
| JP5739400B2 (ja) | 被駆動体の位置補正機能を有するサーボ制御装置 | |
| US10101729B2 (en) | Motor control device, motor control method and computer readable recording medium | |
| JP2008211905A (ja) | サーボモータ制御装置 | |
| JP5302639B2 (ja) | サーボ制御装置 | |
| JP2007219812A (ja) | サーボモータの制御装置 | |
| JP6568035B2 (ja) | サーボモータ制御装置、サーボモータ制御方法、及びサーボモータ制御用プログラム | |
| JP6412075B2 (ja) | サーボモータ制御装置、サーボモータ制御方法、及びサーボモータ制御用プログラム | |
| JP4361285B2 (ja) | 数値制御装置 | |
| US20180200882A1 (en) | Servomotor control device, servomotor control method, and computer readable recording medium | |
| JP4183057B2 (ja) | 数値制御システム | |
| CN112236729B (zh) | 数控装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20180316 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180612 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180619 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180711 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6370866 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |