本実施形態における「回転電機システム」を図1〜図3に示す。本実施形態の「回転電機システム」は、ドライバによるステアリング操作を補助するための電動パワーステアリング装置5を含むステアリングシステム90に適用される。
図1は、ステアリングシステム90の全体構成を示す。ステアリングシステム90は、ハンドル(ステアリングホイール)91、ステアリングシャフト92、ピニオンギア96、ラック軸97、車輪98、および、電動パワーステアリング装置5を備えている。
ハンドル91(ステアリングホイール)に接続されたステアリングシャフト92には、操舵トルクを検出するためのトルクセンサ94が設けられている。トルクセンサ94は、ステアリングシャフト92の回転に伴うトルクを電圧に変換して出力する。ステアリングシャフト92の先端にはピニオンギア96が設けられており、ピニオンギア96はラック軸97に噛み合っている。ラック軸97の両端には、タイロッド等を介して一対の車輪98が回転可能に連結されている。
運転者がハンドル91を回転させると、ハンドル91に接続されたステアリングシャフト92が回転する。ステアリングシャフト92の回転運動は、ピニオンギア96によってラック軸97の直線運動に変換され、ラック軸97の変位量に応じた角度に一対の車輪98が操舵される。
電動パワーステアリング装置5は、操舵アシストトルクを発生するモータ10(回転電機)、モータ10を駆動する回転電機制御装置1、回転軸の回転を減速してステアリングシャフト92に伝達する減速ギア9、及び、トルクセンサ94を含む。本実施形態のモータ10は3相交流ブラシレスモータであり、減速ギア9を正逆回転させる。
図2に示すように、モータ10は、3相ブラシレスモータであって、いずれも図示しないロータおよびステータを有する。ロータは、円筒状の部材であり、その表面に永久磁石が貼り付けられ、磁極を有する。ステータには、2組の巻線群11,12(電機子巻線群)が巻回される。
第1巻線群11は、U1コイル111、V1コイル112、及び、W1コイル113から構成される。第2巻線群12は、U2コイル121、V2コイル122、及び、W2コイル123から構成される。
第1巻線群11と第2巻線群12とは、電気的には独立しているが、同一のステータに巻回されており、モータ10が構成する磁気回路により磁気的に結合されている。また、第1巻線群11のU1コイル111と、第2巻線群12のU2コイル121とは、位相が30°ずれた位置に配置される。V相、W相についても同様である。
回転電機制御装置1は、第1インバータ部21、第2インバータ部22、第1電流検出部26(電流センサ)、第2電流検出部27、第1角度センサ28、第2角度センサ29、第1電源リレー31、第2電源リレー32、第1コンデンサ33、第2コンデンサ34、駆動回路(プリドライバ)35、及び、制御部41を備える。
第1インバータ部21は、6つのスイッチング素子(以下、「スイッチ」と記載する。)211〜216を有し、第1巻線群11のコイル111、112、113への通電を切り替える。
高電位側に設けられる上アームスイッチ211,212,213のドレインは、第1上側母線218を経由してバッテリ30の正極側とそれぞれ接続されている。上アームスイッチ211,212,213のソースは、低電位側に設けられる下アームスイッチ214,215,216のドレインとそれぞれ接続されている。下アームスイッチ214,215,216のソースは、第1下側母線219を経由してバッテリ30の負極側と接続される。上アームスイッチ211,212,213と下アームスイッチ214,215,216との接続点は、それぞれ、U1コイル111、V1コイル112、W1コイル113の一端と接続される。
第2インバータ部22は、6つのスイッチ221〜226を有し、第2巻線群12のコイル121、122、123への通電を切り替える。
高電位側に設けられる上アームスイッチ221,222,223のドレインは、第2上側母線228を経由してバッテリ30の正極側とそれぞれ接続されている。上アームスイッチ221,222,223のソースは、低電位側に設けられる下アームスイッチ224,225,226のドレインとそれぞれ接続されている。下アームスイッチ224,225,226のソースは、第2下側母線229を経由してバッテリ30の負極側と接続される。上アームスイッチ221,222,223と下アームスイッチ224,225,226との接続点は、それぞれ、U2コイル121,V2コイル122,W2コイル123の一端と接続される。
本実施形態のスイッチ211〜216,221〜226は、いずれもMOSFET(金属酸化物絶縁効果トランジスタ)であるが、IGBT(絶縁ゲートバイポーラトランジスタ)やサイリスタや機械式のリレースイッチなどとしてもよい。
第1電流検出部26は、電流検出素子261,262,263から構成される。電流検出素子261は、スイッチ214の低電位側に設けられ、U1コイル111に通電される電流であるU1電流Iu1を検出する。電流検出素子262は、スイッチ215の低電位側に設けられ、V1コイル112に通電される電流であるV1電流Iv1を検出する。電流検出素子263は、スイッチ216の低電位側に設けられ、W1コイル113に通電される電流であるW1電流Iw1を検出する。
第2電流検出部27は、電流検出素子271、272、273から構成される。電流検出素子271は、スイッチ224の低電位側に設けられ、U2コイル121に通電される電流であるU2電流Iu2を検出する。電流検出素子272は、スイッチ225の低電位側に設けられ、V2コイル122に通電される電流であるV2電流Iv2を検出する。電流検出素子273は、スイッチ226の低電位側に設けられ、W2コイル123に通電される電流であるW2電流Iw2を検出する。本実施形態の電流検出素子261〜263、271〜273は、シャント抵抗である。なお、シャント抵抗に代えてホール素子などを用いてもよい。
角度センサ28,29は、ともにモータ10の回転角を検出する。角度センサ28,29は、それぞれ、モータ10の回転子側に設けられる磁気発生部である磁石と、当該磁石に近接して設けられる磁気検出素子とによって構成され、モータ10の回転角度に応じた電圧を出力する。角度センサ28,29を構成する磁気検出素子は、具体的には、トンネル磁気抵抗(TMR: Tunnel Magneto Resistance)素子である。なお、角度センサ28,29を構成する磁気検出素子としてホール素子などを用いてもよい。角度センサ28,29により検出されたモータ10の電気角θは、制御部41へ出力される。
角度センサ28,29は、モータ10の回転子の回転角度に応じた正弦波電圧と、当該正弦波に対して90度位相が進んだ余弦波電圧とを出力する。また、角度センサ28,29における異常などに対応すべく、角度センサ28,29はそれぞれ、第1の余弦波電圧Vx1、及び第1の正弦波電圧Vy1を出力する第1磁気検出素子と、第2の余弦波電圧Vx2、及び第2の正弦波電圧Vy2を出力する第2磁気検出素子と、を備える構成としている。角度センサ28,29がそれぞれ正常な場合、余弦波電圧Vx1と余弦波電圧Vx2とは略等しい値となり、正弦波電圧Vy1と正弦波電圧Vy2とは略等しい値となる。
後述する制御部41は、余弦波電圧Vx1,Vx2と正弦波電圧Vy1,Vy2との比(Vy1/Vx1,Vy2/Vx2)の逆正接を算出することで、モータ10の電気角θを取得する。ここで、第1角度センサ28の出力値に基づいて取得されるモータ10の電気角の検出値をθ1と表し、第2角度センサ29の出力値に基づいて取得されるモータ10の電気角の検出値をθ2と表す。
第1電源リレー31は、バッテリ30から第1インバータ部21への電力供給を遮断可能に設けられている。第2電源リレー32は、バッテリ30から第2インバータ部22への電力供給を遮断可能に設けられている。本実施形態において、電源リレー31,32は、スイッチ211などと同様にMOSFETとしているが、IGBTやサイリスタや機械式のリレースイッチなどとしてもよい。
また、電源リレー31,32をMOSFETとする場合、バッテリ30が誤って逆向きに接続された場合にダイオードを経由して逆向きの電流が流れるのを防ぐべく、ダイオードの向きが反対向きとなるように電源リレー31,32と直列に接続される図示しない逆接保護リレーをそれぞれ設けることが好ましい。
第1コンデンサ33は、バッテリ30及び第1インバータ部21の入力側と並列に接続される。第2コンデンサ34は、バッテリ30及び第2インバータ部22の入力側と並列に接続される。コンデンサ33,34は、電荷を蓄えることで、インバータ部21,22への入力電圧を安定化させたり、サージ電流などのノイズ成分を抑制したりする。
本実施形態では、第1巻線群11、ならびに、第1巻線群11の通電制御に係る第1インバータ部21、第1電流検出部26、第1角度センサ28、第1電源リレー31、及び、第1コンデンサ33を「第1系統101」とし、第2巻線群12、ならびに、第2巻線群12の通電制御に係る第2インバータ部22、第2電流検出部27、第2角度センサ29、第2電源リレー32、及び、第2コンデンサ34を「第2系統102」とする。
制御部41は、電動パワーステアリング装置5全体の制御を司るものであり、各種演算を実行するマイクロコンピュータ等により構成される。制御部41における各処理は、ROMなどに予め記憶されたプログラムをCPUで実行することによるソフトウェアによって実施されてもよいし、専用の電子回路によるハードウェアによって実施されてもよい。
制御部41は、信号生成部48を有する。信号生成部48は、トルクセンサ94から取得される操舵トルク、および、角度センサ28,29から取得される電気角θ1,θ2などに基づき、スイッチ211〜216,221〜226のオンオフを制御する制御信号を生成する。生成された制御信号は、駆動回路35を経由して、スイッチ211〜216,221〜226のゲートに出力される。制御部41は、スイッチ211〜216,221〜226のオンオフ動作を制御することにより、モータ10の駆動を制御する。なお、図2においては、信号生成部48以外の制御部41の構成の記載を省略している。
制御部41の詳細を図3に示す。図3では、第1系統101の制御に係る構成を記載している。また、制御部41は、第2系統102の制御に係る構成を備えているが、図3では省略している。
制御部41は、3相2相変換部510、減算器512,513、制御器514,515、dq非干渉電圧演算部516,517、非干渉電圧補正部518,519、及び、2相3相変換部520を有する。
3相2相変換部510は、第1電流検出部26により検出されたU1電流検出値Iu1、V1電流検出値Iv1、及び、W1電流検出値Iw1を、電気角θ1に基づいてUVW座標系からdq座標系に変換し、第1巻線群11のd軸電流検出値Id1、及び、q軸電流検出値Iq1を算出する。ここで、dq軸の電流検出値Id1,Iq1は、3相の電流検出値Iu1,Iv1,Iw1をdq変換した値であり、いずれも電流検出値の概念に含まれるものである。
d軸減算器512は、d軸電流偏差ΔId1を算出する。d軸電流偏差ΔId1は、d軸電流指令値Id1*とフィードバック制御の対象であるd軸電流検出値Id1との偏差である。q軸減算器513は、q軸電流偏差ΔIq1を算出する。q軸電流偏差ΔIq1は、q軸電流指令値Iq1*とフィードバック制御の対象であるq軸電流検出値Iq1との偏差である。
d軸制御器514は、d軸電流偏差ΔId1が0に収束するように、PI演算により基本d軸電圧指令値Vd1*_bを算出する。q軸制御器515は、q軸電流偏差ΔIq1が0に収束するように、PI演算により基本q軸電圧指令値Vq1*_dを算出する。制御器514,515はPID演算などを実施してもよい。
dq非干渉電圧演算部516は、q軸電流偏差ΔIq1に基づき、d軸非干渉化電圧Vd1_dcを算出する。dq非干渉電圧演算部517は、d軸電流偏差ΔId1に基づき、q軸非干渉化電圧Vq1_dcを算出する。
d軸非干渉電圧補正部518は、基本d軸電圧指令値Vd1*_bからd軸非干渉化電圧Vd1_dcを減算することで、d軸電圧指令値Vd1*を算出する。q軸非干渉電圧補正部519は、基本q軸電圧指令値Vq1*_bにq軸非干渉化電圧Vq1_dcを加算することで、q軸電圧指令値Vq1*を算出する。
2相3相変換部520は、電気角θ1に基づき、d軸電圧指令値Vd1*およびq軸電圧指令値Vq1*をdq座標系からUVW座標系に変換する逆dq変換を行い、U相電圧指令値Vu1*、V相電圧指令値Vv1*、及び、W相電圧指令値Vw1*を算出する。
2相3相変換部520により算出された電圧指令値Vu1*,Vv1*,Vw1*は、信号生成部48(図2参照)に出力される。信号生成部48では、電圧指令値Vu1*,Vv1*,Vw1*に基づいて、スイッチ211〜216のオンオフを制御する制御信号を生成する。具体的には、信号生成部48は、各電圧指令値Vu1*,Vv1*,Vw1*に応じた電圧が出力されるようにPWM演算を実施する。生成された制御信号は、駆動回路35(図2参照)を経由して、第1インバータ部21に出力される。図3においては、信号生成部48および駆動回路35の記載を省略している。
制御部41による第2系統102の制御は、上述した第1系統101の制御と同等であるため説明を省略する。本実施形態の制御部41は、第1角度センサ28の検出値θ1に基づいて第1インバータ部21の制御を行い、第2角度センサ29の検出値θ2に基づいて第2インバータ部22の電力制御を行う。ここで、第1インバータ部21の制御主体と、第2インバータ部22の制御主体とは異なる装置であってもよい。
以上説明したように、本実施形態の電動パワーステアリング装置5は、互いに磁気的に結合する複数の巻線群11,12を有するモータ10の駆動を制御するものであって、インバータ部21,22と、制御部41と、を備える。
インバータ部21,22は、巻線群11,12毎に設けられている。第1インバータ部21は、第1巻線群11の各相に対応して設けられる上アームスイッチ211〜213、及び、上アームスイッチ211〜213の低電位側に接続される下アームスイッチ214〜216を有する。第2インバータ部22は、第2巻線群12の各相に対応して設けられる上アームスイッチ221〜223、及び、上アームスイッチ221〜223の低電位側に接続される下アームスイッチ224〜226を有する。制御部41は、インバータ部21,22を制御する。具体的には、制御部41は、インバータ部21,22のスイッチ211〜216、221〜226のオンオフ作動を制御する。
図4に示すように、回転電機制御装置1(制御部41)は、車両の自律運転用の制御を行う制御装置60と、表示装置61との通信を行う。
制御装置60は、ドライバなどによって操作される操作部63からの入力信号に応じて、ドライバの操作に応じて車両の走行状態を制御する手動制御と、車両の走行状態を各種センサからの入力に応じて自律的に制御する自律制御とを切り替えて実施する。手動制御時には、電動パワーステアリング装置5は、ドライバによる操舵トルクに応じたトルクを出力する。
ここで、制御装置60が実施する自律制御は、ドライバの操作に応じた制御と、自律的な制御とを組み合わせたものを含み、例えば、ドライバの操作に応じた車両の加減速に関する制御と、車両の操舵を自律的に行う制御と、を組み合わせたものを含むものである。制御装置60は、自律制御時には、車両に取り付けられたカメラなどを含む各種センサから入力される情報に基づいて、車両の操舵を自律的に制御する。
表示装置61は、車両の速度などの情報を表示する一般的なものであり、液晶ディスプレイを含む表示部と、当該表示部を制御する制御部とを含むものである。操作部62は、機械的に操作されるスイッチや、タッチパネルに対する入力や音声による入力などによって操作されるソフトウェア的なものを含むものである。
制御装置60は、操作部62に対するドライバによる操作に応じて、手動制御から自律制御への切り替えを行う。制御装置60は、車両の操舵を自律的に制御する場合、モータ10が出力すべきトルク量(トルク指令値)を回転電機制御装置1に通知する。回転電機制御装置1は、モータ10からそのトルク指令値に応じたトルクを出力させる制御を実施する。なお、制御装置60から回転電機制御装置1に対し、トルク指令値に代えて、ステアリングシャフト92の回転角度などを通知するものであってもよい。
ここで、モータ10を含む電動パワーステアリング装置5に異常が生じている状態では、自律制御を正常に実施できない。そこで、制御装置60は、電動パワーステアリング装置5に異常が生じている場合に、手動制御から自律制御への切り替えを禁止する。なお、手動制御から自律制御への切り替えを禁止する主体は制御部41であってもよい。
制御部41は、電動パワーステアリング装置5の異常判定を行う。具体的には、制御部41は、巻線群11,12、巻線群11,12に電力供給を行うインバータ部21,22、巻線群11,12とインバータ部21,22との間の配線、インバータ部21,22とバッテリ30との配線、及び、バッテリ30を含む電源システム、並びに、インバータ部21,22から巻線群11,12への電力出力の制御に用いられる所定の状態量(θ,Id1,Iq1,Id2,Iq2)を検出する電流検出部26,27、及び、角度センサ28,29の異常を判定する。また、制御部41は、トルクセンサ94の異常を判定する。「異常判定部」としての制御部41は、所定の異常判定期間にわたって所定の異常判定条件が継続して成立している場合に、電動パワーステアリング装置5に異常が生じていると判定する。
「異常判定部」としての制御部41は、以下に説明する第1巻線群11及び第1電源システムにおけるショート異常、オープン異常、第1電流検出部26の異常、第1角度センサ28の異常、及び、トルクセンサ94の異常を判定する。以下、ショート異常、オープン異常、第1電流検出部26の異常、第1角度センサ28の異常、及び、トルクセンサ94の異常のそれぞれについて説明する。なお、制御部41は、第2巻線群12及び第2電源システムにおけるショート異常、オープン異常、第2電流検出部27の異常、及び、第2角度センサ29の異常を判定するが、第1巻線群11及び第1電源システムにおけるショート異常、オープン異常、第1電流検出部26の異常、及び、第1角度センサ28の異常の判定と同等であるため、説明を省略する。
制御部41によるショート異常の判定について説明する。制御部41は、第1巻線群11、及び、第1巻線群11に電力供給を行う第1電源システムの少なくとも一方においてショート異常が生じているか否かを判定する。ここで、第1巻線群11に電力供給を行う第1電源システムとは、バッテリ30、バッテリ30と第1インバータ部21との間の配線、第1巻線群11に電力供給を行う第1インバータ部21、及び第1巻線群11と第1インバータ部21との間の配線を含むものである。また、ショート異常は、第1巻線群11が筐体などと接触することで生じる地絡や、第1インバータ部21におけるスイッチ211〜216におけるショート故障(閉固着)や、バッテリ30と第1インバータ部21との間の配線が筐体などと接触することで生じる地絡や、第1巻線群11と第1インバータ部21との間の配線が筐体などと接触することで生じる地絡を含むものである。
第1電流検出部26による相電流Iu1,Iv1,Iw1の検出値や、バッテリ30から第1インバータ部21への入力電流の検出値に基づいて、ショート異常の発生を判定する。より具体的には、第1電流検出部26による相電流Iu1,Iv1,Iw1の検出値が所定の閾値を超える場合に、第1巻線群11、又は、第1巻線群11と第1インバータ部21との間の配線におけるショート異常が発生していると判定する。また、制御部41は、バッテリ30から第1インバータ部21への入力電流の検出値が所定値を超える場合に、バッテリ30と第1インバータ部21との間の配線、又は、第1インバータ部21におけるショート異常が発生していると判定する。
次に、制御部41によるオープン異常の判定について説明する。制御部41は、第1巻線群11、及び、第1巻線群11に電力供給を行う第1電源システムの少なくとも一方においてオープン異常が生じているか否かを判定する。オープン異常は、第1巻線群11における断線や、第1インバータ部21におけるスイッチ211〜216におけるオープン故障(開固着)や、バッテリ30と第1インバータ部21との間の配線における断線や、第1巻線群11と第1インバータ部21との間の配線における断線を含むものである。
制御部41は、第1電流検出部26による相電流Iu1,Iv1,Iw1の検出値や、バッテリ30から第1インバータ部21への入力電流の検出値に基づいて、オープン異常の発生を判定する。より具体的には、第1インバータ部21が所定電圧を出力している状況下で第1電流検出部26による相電流Iu1,Iv1,Iw2の検出値が所定の閾値を下回る場合に、第1巻線群11、第1巻線群11と第1インバータ部21との間の配線、又は、第1インバータ部21におけるオープン異常が発生していると判定する。また、制御部41は、第1インバータ部21の出力電圧の指令値Vu1*,Vv*1,Vw*1が0より大きい所定電圧とされている状況下でバッテリ30から第1インバータ部21への入力電流の検出値が所定値を下回る場合に、バッテリ30と第1インバータ部21との間の配線、又は、第1インバータ部21におけるオープン異常が発生していると判定する。
次に、制御部41による第1電流検出部26における異常の判定について説明する。制御部41は、第1電流検出部26に異常が生じているか否かを判定する。第1電流検出部26による電流Iu1,Iv1,Iw1の検出値の合計値の大きさは、第1電流検出部26が正常な場合略0となり、相電流を検出する検出素子261〜263や、検出素子261〜263と制御部41との配線などにおいて異常が生じていると0より大きい値となる。そこで、制御部41は、第1電流検出部26による電流Iu1,Iv1,Iw1の検出値の合計値の大きさが所定値より大きい(略0となっていない)場合に、第1電流検出部26に異常が生じていると判定する。
次に、制御部41による第1角度センサ28における異常の判定について説明する。制御部41は、第1角度センサ28に異常が生じているか否かを判定する。第1角度センサ28は、同一の回転角度を出力する2つの検出素子を備えている。これらの検出素子が正常である場合、検出素子の出力値は同じ値となる。そこで、制御部41は、第1角度センサ28を構成する2つの検出素子の出力値を比較して、所定値以上のずれが生じていた場合に第1角度センサ28に異常が生じていると判定する。
具体的には、制御部41は、第1角度センサ28の第1磁気検出素子が出力する余弦波電圧Vx1と、第1角度センサ28の第2磁気検出素子が出力する余弦波電圧Vx2とを比較する。また、制御部41は、第1角度センサ28の第1磁気検出素子が出力する正弦波電圧Vy1と第1角度センサ28の第2磁気検出素子が出力する正弦波電圧Vy2とを比較する。図5に各磁気検出素子が出力する余弦波電圧Vx1,Vx2と、正弦波電圧Vy1,Vy2と、を示す。制御部41は、余弦波電圧Vx1,Vx2の間で所定値以上の差異が生じている場合、又は、正弦波電圧Vy1,Vy2の間で所定値以上の差異が生じている場合、第1角度センサ28に異常が生じていると判定する。
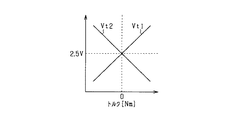
次に、制御部41によるトルクセンサ94における異常の判定について説明する。制御部41は、トルクセンサ94に異常が生じているか否かを判定する。トルクセンサ94は、2つの検出素子を備え、その2つの検出素子が、それぞれステアリングシャフト92の回転に伴うトルクを電圧に変換し、制御部41に対して出力する。本実施形態では、2つの検出素子は逆方向のトルクを検出するように設けられており、それぞれ図6に示す電圧Vt1,Vt2を出力する。なお、2つの検出素子は、同一方向のトルクを検出するものであってもよい。トルクセンサ94を構成する検出素子は、正常時においては、同一の大きさとなる。そこで、制御部41は、トルクセンサ94を構成する2つの検出素子による出力電圧Vt1,Vt2を比較して、所定値以上のずれが生じていた場合にトルクセンサ94に異常が生じていると判定する。
ここで、「正常判定部」としての制御部41は、上述した異常判定に加え、電動パワーステアリング装置5が正常に動作するか否かの判定を行う。そして、制御部41は、外部装置としての制御装置60及び表示装置61に対して、電動パワーステアリング装置5が正常である旨を通知する。本実施形態の制御装置60は、電動パワーステアリング装置5が正常である旨が制御部41から通知されたことを条件として、手動制御から自律制御への切り替えを許可する。なお、手動制御から自律制御への切り替えを許可する主体は制御部41であってもよい。「正常判定部」としての制御部41は、所定の正常判定期間にわたって、モータ10の動作時に成立する所定の正常判定条件が成立し、且つ、異常判定条件が成立していない場合に、電動パワーステアリング装置5が正常であると判定する。
なお、「正常判定部」としての制御部41は、第2巻線群12及び第2電源システムにおけるショート異常、オープン異常、第2電流検出部27の異常、及び、第2角度センサ29の異常に係る正常判定を実施するが、第1巻線群11及び第1電源システムにおけるショート異常、オープン異常、第1電流検出部26の異常、及び、第1角度センサ28の異常に係る正常判定と同等であるため、説明を省略する。
「正常判定部」としての制御部41は、ショート異常に係る正常判定時において、第1電流検出部26による相電流Iu1,Iv1,Iv2の検出値が所定値を超えることを異常判定条件とするともに、正常判定条件とする。
「正常判定部」としての制御部41は、オープン異常に係る正常判定時において、第1インバータ部21が所定電圧を出力している状況下で第1電流検出部26による相電流Iu1,Iv1,Iw2の検出値のいずれかが所定の閾値を下回ることを異常判定条件とする。また、制御部41は、第1電流検出部26による相電流Iu1,Iv1,Iv2の検出値それぞれが所定の閾値を超えることを正常判定条件とする。
また、「正常判定部」としての制御部41は、第1電流検出部26の正常判定時において、第1電流検出部26による相電流Iu1,Iv1,Iw1の検出値の合計値の大きさが所定の閾値を超えることを異常判定条件とする。また、制御部41は、第1電流検出部26による相電流Iu1,Iv1,Iw1の検出値の大きさがそれぞれ所定の閾値を超えることを正常判定条件とする。
また、「正常判定部」としての制御部41は、第1角度センサ28の正常判定時において、第1角度センサ28を構成する2つの検出素子の出力値を比較して、所定の閾値を超えるずれが生じていることを異常判定条件とする。また、制御部41は、第1角度センサ28の検出値が所定の範囲で変化したことを正常判定条件とする。具体的には、第1角度センサ28の検出値θ1の変化量を積算した値が所定の閾値(例えば、360度)を超えていることを正常判定条件とする。また、モータ10が第1角度センサ28の検出範囲の半分以上、即ち、180度以上回転したことを判定できるように所定の範囲を設定してもよい。
また、第1角度センサ28による電気角θの検出範囲を所定数の区画に分割し、第1角度センサ28の検出値θ1が所定数の区画を通過したことを正常判定条件としてもよい。例えば、第1角度センサ28による電気角θの検出範囲を6つの区画、即ち、第1区画:0度〜60度、第2区画:60度〜120度、第3区画:120度〜180度、第4区画:180度〜240度、第5区画:240度〜300度、第6区画:300度〜360度に分割する。そして、第1角度センサ28の検出値θ1が、第1〜第6区画の全てを通過したこと(第1角度センサ28の検出値θ1が、各区画に属する値のいずれかと等しくなったこと)を正常判定条件としてもよい。なお、第1角度センサ28の検出値θ1が、第1〜第6区画のうち所定数(例えば、3つの区画)を通過したことを正常判定条件としてもよい。
また、「正常判定部」としての制御部41は、トルクセンサ94を構成する第1検出素子の出力値Vt1の大きさと第2検出素子の出力値Vt2の大きさとを比較して、所定の閾値を超えるずれが生じていることを異常判定条件とする。また、制御部41は、トルクセンサ94によるトルクの検出値の大きさが所定値を超えることを正常判定条件とする。
図7にショート異常に係る異常判定及び正常判定処理を表すフローチャートを示す。当該処理は制御部41によって実施される。ステップS01〜S05の処理が「異常判定部」としての制御部41による処理に相当し、ステップS01〜S09が「正常判定部」としての制御部41による処理に相当する。
ステップS01において、第1電流検出部26からU1相、V1相、W1相に流れる電流Iu1,Iv1,Iw1の検出値を取得し、相電流Iu1,Iv1,Iw1の検出値の大きさのいずれかが所定の閾値(例えば、100A)を超えているか否かを判定する。ここで、ステップS01の判定に用いる閾値は、第1インバータ部21から第1巻線群11に電流が流れる経路において、ショート異常が生じていることが判定可能な値に設定されている。つまり、ステップS01の判定に用いる閾値は、モータ10の正常動作時における相電流Iu1,Iv1,Iw1の検出値の大きさより大きく、ショート異常の発生時の相電流Iu1,Iv1,Iw1の検出値の大きさより小さい値に設定されている。
ステップS01において肯定的な判断がなされた場合(S01:YES)、即ち、ショート異常に係る異常判定条件が成立している場合、ステップS02において、異常カウンタを1増加させる。なお、異常カウンタの初期値は0に設定されている。また、ステップS01において否定的な判断がなされた場合(S01:NO)、即ち、ショート異常に係る異常判定条件が成立していない場合、ステップS03において、異常カウンタを0に初期化する。ステップS02,S03の後、ステップS04において、異常カウンタの値が所定値(例えば、50)以下か否かを判定する。異常カウンタの値が所定値より大きい場合(S04:NO)、ステップS05においてショート異常が発生していると判定を行い、当該異常判定の結果を制御装置80に通知し、処理を終了する。
ステップS04において異常カウンタの値が所定値以下であると判定された場合(S04:YES)の後、ステップS06において、異常カウンタが0であるか否かを判定する。異常カウンタが0より大きい場合(S06:NO)、ステップS01以降の処理を繰り替えし実施する。異常カウンタが0の場合(S06:YES)、ステップS07において、正常カウンタを1増加させる。なお、正常カウンタの初期値は0に設定されている。ステップS08において、正常カウンタが50より大きいか否かを判定する。正常カウンタが50以下の場合(S08:NO)、ステップS09において、ショート異常が生じていないとする正常判定を行い、当該正常判定の結果を制御装置80に通知し、ステップS01以降の処理を繰り返し実施する。
図8にオープン異常に係る異常判定及び正常判定処理を表すフローチャートを示す。当該処理は制御部41によって実施される。図7と同等の処理については同一の符号を付し、適宜説明を省略する。また、図7に示す異常カウンタ及び正常カウンタと、図8に示す異常カウンタ及び正常カウンタとは、説明の便宜上同一の名前を付しているが異なる変数である。
図8に示すフローチャートでは、図7のステップS01に代えて、ステップS11の処理を実行し、ステップS04の肯定的な判断とステップS06の処理との間でステップS12の処理を実行する。ステップS11,S02〜S05の処理が「異常判定部」としての制御部41による処理に相当し、ステップS11,S02〜S05,S12,S06〜S09の処理が「正常判定部」としての制御部41による処理に相当する。
ステップS11では、オープン異常時の異常判定条件が成立しているか否かを判定する。具体的には、相電流Iu1,Iv1,Iw1の検出値、バッテリ30の出力電圧(電源電圧)の検出値、第1インバータ部21の出力電圧の指令値Vu1*,Vv1*,Vw1*、及び、モータ10の回転速度を取得する。そして、電源電圧の検出値が所定値(例えば、9V)より大きく、且つ、出力電圧の指令値Vu1*,Vv1*,Vw1*のそれぞれが所定値(例えば、5V)より大きく、且つ、モータ10の回転速度が所定値(例えば500rpm)より小さく、且つ、相電流Iu1,Iv1,Iw1の検出値の少なくとも一つが所定の閾値(30A)より小さい場合に、オープン異常が生じていると判定する。ステップS11において肯定的な判断がなされた場合、ステップS02の処理に進み、ステップS11において否定的な判断がなされた場合、ステップS03の処理に進む。
ステップS12では、相電流Iu1,Iv1,Iw1の検出値の大きさのうち少なくとも一が、所定の閾値(5A)より大きいか否かを判定する。相電流Iu1,Iv1,Iw1の検出値の大きさのうち少なくとも一つが、所定の閾値(5A)より大きい場合(S12:YES)、ステップS06以降の処理を実施する。また、相電流Iu1,Iv1,Iw1の検出値の大きさのいずれもが、所定の閾値(5A)以下の場合(S12:NO)、再度ステップS11以降の処理を実施する。
図9に第1電流検出部26に係る異常判定及び正常判定処理を表すフローチャートを示す。当該処理は制御部41によって実施される。図6と同等の処理については同一の符号を付し、適宜説明を省略する。図9に示すフローチャートでは、図6のステップS01に代えて、ステップS21の処理を実行し、ステップS04の肯定的な判断とステップS06の処理との間にステップS22の処理を実行する。ステップS21,S02〜S05の処理が「異常判定部」としての制御部41による処理に相当し、ステップS21,S02〜S05,S22,S06〜S09の処理が「正常判定部」としての制御部41による処理に相当する。
ステップS21では、第1電流検出部26に係る異常判定条件が成立しているか否かを判定する。具体的には、相電流Iu1,Iv1,Iw1の検出値の合計値の大きさが所定の閾値(5A)より大きいか否かを判定する。相電流Iu1,Iv1,Iw1の検出値の合計値の大きさが所定の閾値(5A)より大きい場合、電流検出素子261,262,263の少なくとも一つおいて異常(例えば、出力値が常に0になる異常)が生じていると判定する。ステップS21において肯定的な判断がなされた場合、ステップS02の処理に進み、ステップS21において否定的な判断がなされた場合、ステップS03の処理に進む。
ステップS22では、相電流Iu1,Iv1,Iw1の検出値の大きさのうち少なくとも一が、所定の閾値(5A)より大きいか否かを判定する。相電流Iu1,Iv1,Iw1の検出値の大きさのうち少なくとも一つが、所定の閾値(5A)より大きい場合(S22:YES)、ステップS06以降の処理を実施する。また、相電流Iu1,Iv1,Iw1の検出値の大きさのいずれもが、所定の閾値(5A)以下の場合(S22:NO)、再度ステップS21以降の処理を実施する。
図10に第1角度センサ28に係る異常判定及び正常判定処理を表すフローチャートを示す。当該処理は制御部41によって実施される。図6と同等の処理については同一の符号を付し、適宜説明を省略する。図10に示すフローチャートでは、図6のステップS01に代えて、ステップS31の処理を実行し、ステップS04の肯定的な判断とステップS06の処理との間にステップS32の処理を実行する。ステップS31,S02〜S05の処理が「異常判定部」としての制御部41による処理に相当し、ステップS31,S02〜S05,S32,S06〜S09の処理が「正常判定部」としての制御部41による処理に相当する。
ステップS31では、第1角度センサ28に異常が生じているか否かを判定する。具体的には、余弦波電圧Vx1,Vx2の間で所定値(例えば、0.2V)以上の差異が生じている場合、又は、正弦波電圧Vy1,Vy2の間で所定値(例えば、0.2V)以上の差異が生じている場合、第1角度センサ28に異常が生じていると判定する。ステップS31において肯定的な判断がなされた場合、ステップS02の処理に進み、ステップS31において否定的な判断がなされた場合、ステップS03の処理に進む。
ステップS32では、第1角度センサ28から入力されるモータ10の電気角θ1の変化量の積算値が所定値(例えば、360度)を超えているか否かを判定する。第1角度センサ28から入力されるモータ10の電気角θ1の変化量の積算値が所定値を超えている場合(S32:YES)、ステップS06以降の処理を実施する。また、第1角度センサ28から入力されるモータ10の電気角θ1の変化量の積算値が所定値以下の場合(S32:NO)、再度ステップS31以降の処理を実施する。
図11にトルクセンサ94に係る異常判定及び正常判定処理を表すフローチャートを示す。当該処理は制御部41によって実施される。図6と同等の処理については同一の符号を付し、適宜説明を省略する。図11に示すフローチャートでは、図6のステップS01に代えて、ステップS41の処理を実行し、ステップS03の処理とステップS06の処理との間にステップS42の処理を実行する。ステップS41,S02〜S05の処理が「異常判定部」としての制御部41による処理に相当し、ステップS41,S02〜S05,S42,S06〜S09の処理が「正常判定部」としての制御部41による処理に相当する。
ステップS41では、トルクセンサ94に異常が生じているか否かを判定する。具体的には、トルクセンサ94の第1検出素子によるトルクの検出値と、トルクセンサ94の第2検出素子によるトルクの検出値とを比較して、所定値以上のずれが生じている場合、トルクセンサ94において異常が生じていると判定する。ステップS41において肯定的な判断がなされた場合、ステップS02の処理に進み、ステップS41において否定的な判断がなされた場合、ステップS03の処理に進む。
ステップS42では、トルクセンサ94から入力されるハンドル91のトルクの検出値が所定値(例えば、0.5Nm)より大きいか否かを判定する。トルクセンサ94入力されるトルクの検出値が所定値より大きい場合(S42:YES)、ステップS06以降の処理を実施する。また、トルクセンサ94から入力されるトルクの検出値が所定値以下の場合(S42:NO)、再度ステップS41以降の処理を実施する。
図12に手動制御から自律制御への切り替え処理を表すフローチャートを示す。当該処理は、制御装置60によって所定周期毎に実施される。
ステップS51において、操作部63から手動制御から自律制御への切り替え指令が入力されているか否かを判定する。切り替え指令が入力されていない場合(S51:NO)、処理を終了する。切り替え指令が入力されている場合(S51:YES)、ステップS52において、電動パワーステアリング装置5に異常が発生している旨の判定が制御部41によってなされているか否かを判定する。
電動パワーステアリング装置5に異常が発生している旨の判定が制御部41によってなされていない場合(S52:NO)、ステップS53において、電動パワーステアリング装置5が正常である旨の判定が制御部41によってなされているか否かを判定する。電動パワーステアリング装置5が正常である旨の通知が制御部41によってなされている場合(S53:YES)、ステップS54において、手動制御から自律制御への切り替えを実施する。電動パワーステアリング装置5に異常が発生している旨の判定が制御部41によってなされている場合(S52:YES)、ステップS57において、手動制御から自律制御への切り替えを禁止し処理を終了する。
電動パワーステアリング装置5が正常である旨の判定が制御部41によってなされていない場合(S53:NO)、ステップS55において、インバータ部21,22から巻線群11,12に対して所定の電力パターンを供給するように制御部41に指令を行い、所定時間待機する.その後、ステップS56において、電動パワーステアリング装置5が正常である旨の判定が制御部41によってなされているか否かを再び判定する。電動パワーステアリング装置5が正常である旨の判定が制御部41によってなされている場合(S56:YES)、ステップS54において、手動制御から自律制御への切り替えを実施する。電動パワーステアリング装置5が正常である旨の通知が制御部41によってなされていない場合(S56:NO)、ステップS57において、手動制御から自律制御への切り替えを禁止し処理を終了する。
ステップS53〜57の処理により、制御装置60は、手動制御から自律制御への切り替えの際、電動パワーステアリング装置5が正常である旨の通知が制御部41から行われていないことを条件として、インバータ部21,22からモータ10に対して所定パターンの電力を供給することで正常判定条件を成立させる。そして、インバータ部21,22からモータ10に対して所定パターンの電力を供給した後に、制御部41から、電動パワーステアリング装置5が正常である旨の通知がなされたことを条件として、手動制御から自律制御への切り替えを実施する。
ここで、ステップS55における指令に伴って、インバータ部21,22から巻線群11,12に対して供給される所定の電力パターンとは、特に、ショート異常、オープン異常、第1電流検出部26の異常、又は、第1角度センサ28の異常を検出可能な電力パターンである。
例えば、制御部41は、所定の電力パターンとして、モータ10に流れるd軸電流Id1,Id2が0以外の所定電流となり、かつ、モータ10に流れるq軸電流Iq1,Iq2が略0となる電力を供給する。当該電力を供給することで、モータ10の出力トルクを変動させることなく、オープン異常、及び、ショート異常に関する正常判定を実施することが可能になる。
また、例えば、制御部41は、所定パターンの電力として、モータ10に対し、モータ10からトルクが出力されてから車両のヨーレイトが変化するまでの応答時間であるヨーレイト時定数より短い周期で変化する電力を供給する。当該電力を通電することで、車両のヨーレイトを変動させることなく、オープン異常、ショート異常、及び、第1電流検出部26に関する正常判定を実施することが可能になる。ヨーレイト時定数より短い周期で変化し、かつ、インバータ部21,22から見た巻線群11,12側の回路の時定数より長い周期で変化する電力パターンとすることで、インバータ部21,22から巻線群11,12側に電流を流すことができる。また、ヨーレイト時定数より短い周期で変化し、かつ、実効値が0となるようにd軸電流の指令値Id1*,Id2*が変化する電力パターンを供給することで、モータ10におけるヨーレイトの変動を抑えることができる。
また、例えば、制御部41は、所定パターンの電力として、巻線群11,12において、出力トルクが打ち消しあう電力パターンをインバータ部21,22から供給する。当該電力パターンを供給することで、モータ10の出力トルクを変動させることなく、オープン異常、ショート異常、及び、第1電流検出部26に関する正常判定を実施することが可能になる。
また、制御部41は、所定の電力パターンとして、モータ10が実際に回転するような電力パターンを供給することで、第1角度センサ28に関する正常判定を行うことが可能になる。
(他の実施形態)
・上記実施形態の制御部41は、ショート異常、オープン異常、第1電流検出部26の異常、第1角度センサ28の異常、及び、トルクセンサ94の異常を判定する。これを変更し、制御部41が、ショート異常、オープン異常、第1電流検出部26の異常、第1角度センサ28の異常、及び、トルクセンサ94の異常のうち少なくともいずれか一つを判定する構成としてもよい。
・上記実施形態のモータ10は、2つの巻線群11,12を備える構成としたが、これを変更し、1つ、又は3つ以上の巻線群を備える構成としてもよい。
・上記実施形態のモータ10として、永久磁石型ブラシレスモータを用いたがこれを変更してもよい。例えば、界磁巻線型ブラシレスモータを用いてもよい。
・自律運転制御装置60による自律運転制御は省略してもよい。
・回転電機システムは、ステアリングシステム以外に適用されるものであってもよい。即ち、車両の動力源として動作する回転電機を含む回転電機システムに本実施形態の構成を適用してもよい。