JP2018029280A - 撮像装置と撮像方法 - Google Patents
撮像装置と撮像方法 Download PDFInfo
- Publication number
- JP2018029280A JP2018029280A JP2016160549A JP2016160549A JP2018029280A JP 2018029280 A JP2018029280 A JP 2018029280A JP 2016160549 A JP2016160549 A JP 2016160549A JP 2016160549 A JP2016160549 A JP 2016160549A JP 2018029280 A JP2018029280 A JP 2018029280A
- Authority
- JP
- Japan
- Prior art keywords
- pixel
- polarization
- image
- unit
- imaging
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000003384 imaging method Methods 0.000 title claims abstract description 214
- 230000010287 polarization Effects 0.000 claims abstract description 236
- 230000035945 sensitivity Effects 0.000 claims abstract description 116
- 238000012545 processing Methods 0.000 claims abstract description 107
- 230000015572 biosynthetic process Effects 0.000 claims abstract description 16
- 238000003786 synthesis reaction Methods 0.000 claims abstract description 16
- 238000001514 detection method Methods 0.000 claims description 61
- 238000000034 method Methods 0.000 claims description 28
- 230000008569 process Effects 0.000 claims description 23
- 230000007246 mechanism Effects 0.000 claims description 11
- 229920006395 saturated elastomer Polymers 0.000 claims description 9
- 239000002131 composite material Substances 0.000 claims description 3
- 230000033001 locomotion Effects 0.000 abstract description 13
- 238000004891 communication Methods 0.000 description 45
- 238000005516 engineering process Methods 0.000 description 16
- 239000013256 coordination polymer Substances 0.000 description 15
- 239000000203 mixture Substances 0.000 description 10
- 230000006870 function Effects 0.000 description 8
- 230000003287 optical effect Effects 0.000 description 7
- 238000006243 chemical reaction Methods 0.000 description 6
- 239000004065 semiconductor Substances 0.000 description 5
- 238000012937 correction Methods 0.000 description 4
- 238000010586 diagram Methods 0.000 description 4
- 238000010191 image analysis Methods 0.000 description 4
- 230000007423 decrease Effects 0.000 description 3
- 230000002950 deficient Effects 0.000 description 3
- 239000004973 liquid crystal related substance Substances 0.000 description 3
- 230000001133 acceleration Effects 0.000 description 2
- 230000002730 additional effect Effects 0.000 description 2
- 238000013459 approach Methods 0.000 description 2
- 238000004364 calculation method Methods 0.000 description 2
- 230000010267 cellular communication Effects 0.000 description 2
- 238000002485 combustion reaction Methods 0.000 description 2
- 230000000295 complement effect Effects 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 230000007613 environmental effect Effects 0.000 description 2
- 238000009434 installation Methods 0.000 description 2
- 229910044991 metal oxide Inorganic materials 0.000 description 2
- 150000004706 metal oxides Chemical class 0.000 description 2
- 238000001454 recorded image Methods 0.000 description 2
- 230000005236 sound signal Effects 0.000 description 2
- 230000009471 action Effects 0.000 description 1
- 238000004458 analytical method Methods 0.000 description 1
- 230000003190 augmentative effect Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 238000012790 confirmation Methods 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 238000001816 cooling Methods 0.000 description 1
- 230000006866 deterioration Effects 0.000 description 1
- 239000000284 extract Substances 0.000 description 1
- 230000010365 information processing Effects 0.000 description 1
- 230000007774 longterm Effects 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 230000000116 mitigating effect Effects 0.000 description 1
- 238000010295 mobile communication Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 238000004321 preservation Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 238000006467 substitution reaction Methods 0.000 description 1
Images




















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01J—MEASUREMENT OF INTENSITY, VELOCITY, SPECTRAL CONTENT, POLARISATION, PHASE OR PULSE CHARACTERISTICS OF INFRARED, VISIBLE OR ULTRAVIOLET LIGHT; COLORIMETRY; RADIATION PYROMETRY
- G01J4/00—Measuring polarisation of light
- G01J4/04—Polarimeters using electric detection means
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01J—MEASUREMENT OF INTENSITY, VELOCITY, SPECTRAL CONTENT, POLARISATION, PHASE OR PULSE CHARACTERISTICS OF INFRARED, VISIBLE OR ULTRAVIOLET LIGHT; COLORIMETRY; RADIATION PYROMETRY
- G01J3/00—Spectrometry; Spectrophotometry; Monochromators; Measuring colours
- G01J3/28—Investigating the spectrum
- G01J3/447—Polarisation spectrometry
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01J—MEASUREMENT OF INTENSITY, VELOCITY, SPECTRAL CONTENT, POLARISATION, PHASE OR PULSE CHARACTERISTICS OF INFRARED, VISIBLE OR ULTRAVIOLET LIGHT; COLORIMETRY; RADIATION PYROMETRY
- G01J4/00—Measuring polarisation of light
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/70—Circuitry for compensating brightness variation in the scene
- H04N23/741—Circuitry for compensating brightness variation in the scene by increasing the dynamic range of the image compared to the dynamic range of the electronic image sensors
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/50—Control of the SSIS exposure
- H04N25/57—Control of the dynamic range
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/50—Control of the SSIS exposure
- H04N25/57—Control of the dynamic range
- H04N25/58—Control of the dynamic range involving two or more exposures
- H04N25/581—Control of the dynamic range involving two or more exposures acquired simultaneously
- H04N25/585—Control of the dynamic range involving two or more exposures acquired simultaneously with pixels having different sensitivities within the sensor, e.g. fast or slow pixels or pixels having different sizes
Landscapes
- Physics & Mathematics (AREA)
- Spectroscopy & Molecular Physics (AREA)
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- General Physics & Mathematics (AREA)
- Studio Devices (AREA)
- Blocking Light For Cameras (AREA)
Abstract
Description
入射光に基づいて画素信号を生成する複数の画素を所定の偏光方向の偏光画素と非偏光画素で構成した撮像部と、
前記撮像部の入射面側に設けられて、前記入射光の偏光方向を回転させる偏光回転部と、
を有する撮像装置にある。
この場合は、高解像度の画像を得ることができる。
入射光に基づいて画素信号を生成する複数の画素を、所定の偏光方向の偏光画素と非偏光画素で構成した撮像部に、偏光回転部を介した前記入射光が入射されて、前記入射光の偏光方向の回転位置に応じたダイナミックレンジで撮像画の画像信号を生成すること
を含む撮像方法にある。
2.撮像装置の動作
2−1.ダイナミックレンジ重視と解像度重視の撮像動作
2−2.撮像動作例
3.撮像装置の他の構成
4.応用例
<1.撮像装置の構成>
図1は、撮像装置の構成を例示している。撮像装置10は、偏光回転部11、レンズ系ブロック12、撮像部13、画像信号処理部14、表示部15、画像保存部16、ユーザインタフェース部17、制御部20を有している。
次に撮像装置の動作について説明する。図3は撮像装置の動作を示すフローチャートである。ステップST1で制御部は撮像設定処理を行う。図4は撮像設定処理を示すフローチャートである。
次に撮像装置におけるダイナミックレンジ重視の撮像動作について説明する。図6は、入射光と偏光素子を透過した直線偏光および撮像部の関係を示している。偏光素子111に入射光LAが入射されると、偏光素子111は直線偏光LBを透過して撮像部13に入射する。また、撮像部13に入射される入射光の光軸方向を回転軸として偏光素子111を回転すると、直線偏光LBの偏光方向が変化する。例えば図6の(a)に示すように偏光素子111の回転角θが「θ=0°」である場合、直線偏光LBと撮像部13における偏光画素CPと偏光方向が等しくなる。また、図6の(b)に示すように偏光素子111の回転角θが「θ=45°」である場合、直線偏光LBと撮像部13における偏光画素CPで偏光方向の角度差を生じる。また、図6の(c)に示すように偏光素子111の回転角θが「θ=90°」である場合、直線偏光LBと撮像部13における偏光画素CPの偏光方向は直交する方向となる。
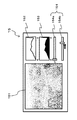
次に、撮像動作例について説明する。図12〜図17は表示部の表示画面を例示している。表示画面では、画像表示領域151と非偏光画素群ヒストグラム表示領域152、偏光画素群ヒストグラム表示領域153、ユーザインタフェース表示領域154が設けられている。
上述の実施の形態では、偏光回転部11をレンズ系ブロック12の入射光面側に設けた構成を例示したが、偏光回転部11は撮像部13の入射光面側の位置であればよい。図18は撮像装置の他の構成を例示しており、撮像装置10aでは、レンズ系ブロック12と撮像部13との間に偏光回転部11を設けている。
本開示に係る技術は、様々な製品へ応用することができる。例えば、本開示に係る技術は、情報処理端末に限らず、自動車、電気自動車、ハイブリッド電気自動車、自動二輪車、自転車、パーソナルモビリティ、飛行機、ドローン、船舶、ロボット、建設機械、農業機械(トラクター)などのいずれかの種類の移動体に搭載される装置として実現されてもよい。
(1) 入射光に基づいて画素信号を生成する複数の画素を所定の偏光方向の偏光画素と非偏光画素で構成した撮像部と、
前記撮像部の入射面側に設けられて、前記入射光の偏光方向を回転させる偏光回転部と、
を有する撮像装置。
(2) 前記入射光の偏光方向の回転位置に応じたダイナミックレンジの撮像画の画像信号を生成する画像信号処理部をさらに備える(1)に記載の撮像装置。
(3) 前記入射光の偏光方向と前記所定の偏光方向の違いによって感度が変化する前記偏光画素の感度を検出する感度検出部をさらに備え、
前記画像信号処理部は、前記非偏光画素と前記偏光画素の感度差が閾値よりも大きい場合、前記入射光の偏光方向の回転位置に応じたダイナミックレンジの撮像画の画像信号を生成する(2)に記載の撮像装置。
(4) 前記画像信号処理部は、前記感度検出部で検出した感度に応じてダイナミックレンジを変化させる(3)に記載の撮像装置。
(5) 前記画像信号処理部は、前記感度検出部で検出した感度に基づき前記偏光画素に対する利得調整を行い、利得調整後の画像信号を用いて画像合成して、前記感度に応じたダイナミックレンジの画像信号を生成する(4)に記載の撮像装置。
(6) 前記画像信号処理部は、前記画像合成において、前記非偏光画素で飽和を生じる場合に、前記非偏光画素を用いて生成した撮像画の画像信号から、前記非偏光画素よりも感度の低い偏光画素を用いて生成した撮像画の画像信号に切り替える(5)に記載の撮像装置。
(7) 前記画像信号処理部は、前記非偏光画素を用いて生成した撮像画の画像信号と前記偏光画素を用いて生成した撮像画の画像信号の合成比を、前記入射光に応じて制御して、前記非偏光画素を用いて生成した撮像画の画像信号から、前記偏光画素を用いて生成した撮像画の画像信号に切り替える(6)に記載の撮像装置。
(8) 前記画像信号処理部は、前記非偏光画素と前記偏光画素の感度差が閾値以下である場合、各画素の画素信号に基づき対応する画素の画像を示す撮像画の画像信号を生成する(3)乃至(7)のいずれかに記載の撮像装置。
(9) 前記感度検出部は、前記入射光の偏光方向の回転位置に基づき前記偏光画素の感度を算出する(3)乃至(8)のいずれかに記載の撮像装置。
(10) 前記感度検出部は、前記偏光画素で生成された画素信号に基づき前記偏光画素の感度を算出する(3)乃至(8)のいずれかに記載の撮像装置。
(11) 表示部をさらに備え、
前記表示部では前記撮像画と前記入射光の偏光方向の回転操作を行うためのユーザインタフェース画像を表示する(2)乃至(10)のいずれかに記載の撮像装置。
(12) 前記表示部では前記偏光画素または前記非偏光画素に関する信号強度分布を示す画像を表示する(11)に記載の撮像装置。
(13) 前記偏光回転部を制御する制御部をさらに備え、
前記制御部は、前記非偏光画素で信号強度の飽和を生じないように前記入射光の偏光方向を回転させる(1)乃至(12)のいずれかに記載の撮像装置。
(14) 前記偏光回転部は、前記撮像部の入射面側に設けられて前記入射光のうち特定の偏波のみを通す偏光素子と、該偏光素子を任意の角度に回転する機構からなる(1)乃至(13)のいずれかに記載の撮像装置。
11・・・偏光回転部
12・・・レンズ系ブロック
13・・・撮像部
14・・・画像信号処理部
15・・・表示部
16・・・画像保存部
17・・・ユーザインタフェース部
20・・・制御部
111・・・偏光素子
112・・・回転駆動部
113・・・回転位置検出部
131・・・イメージセンサ
132・・・偏光フィルタ
151・・・画像表示領域
152・・・非偏光画素群ヒストグラム表示領域
153・・・偏光画素群ヒストグラム表示領域
154・・・ユーザインタフェース表示領域
154a,154b・・・スライダー
Claims (15)
- 入射光に基づいて画素信号を生成する複数の画素を所定の偏光方向の偏光画素と非偏光画素で構成した撮像部と、
前記撮像部の入射面側に設けられて、前記入射光の偏光方向を回転させる偏光回転部と、
を有する撮像装置。 - 前記入射光の偏光方向の回転位置に応じたダイナミックレンジの撮像画の画像信号を生成する画像信号処理部をさらに備える
請求項1に記載の撮像装置。 - 前記入射光の偏光方向と前記所定の偏光方向の違いによって感度が変化する前記偏光画素の感度を算出する感度検出部をさらに備え、
前記画像信号処理部は、前記非偏光画素と前記偏光画素の感度差が閾値よりも大きい場合、前記入射光の偏光方向の回転位置に応じたダイナミックレンジの撮像画の画像信号を生成する
請求項2に記載の撮像装置。 - 前記画像信号処理部は、前記感度検出部で算出した感度に応じてダイナミックレンジを変化させる
請求項3に記載の撮像装置。 - 前記画像信号処理部は、前記感度検出部で算出した感度に基づき前記偏光画素に対する利得調整を行い、利得調整後の画像信号を用いて画像合成して、前記感度に応じたダイナミックレンジの画像信号を生成する
請求項4に記載の撮像装置。 - 前記画像信号処理部は、前記画像合成において、前記非偏光画素で飽和を生じる場合に、前記非偏光画素を用いて生成した撮像画の画像信号から、前記非偏光画素よりも感度の低い偏光画素を用いて生成した撮像画の画像信号に切り替える
請求項5に記載の撮像装置。 - 前記画像信号処理部は、前記非偏光画素を用いて生成した撮像画の画像信号と前記偏光画素を用いて生成した撮像画の画像信号の合成比を、前記入射光に応じて制御して、前記非偏光画素を用いて生成した撮像画の画像信号から、前記偏光画素を用いて生成した撮像画の画像信号に切り替える
請求項6に記載の撮像装置。 - 前記画像信号処理部は、前記非偏光画素と前記偏光画素の感度差が閾値以下である場合、各画素の画素信号に基づき対応する画素の画像を示す撮像画の画像信号を生成する
請求項3に記載の撮像装置。 - 前記感度検出部は、前記入射光の偏光方向の回転位置に基づき前記偏光画素の感度を算出する
請求項3に記載の撮像装置。 - 前記感度検出部は、前記偏光画素で生成された画素信号に基づき前記偏光画素の感度を検出する
請求項3に記載の撮像装置。 - 表示部をさらに備え、
前記表示部では前記撮像画と前記入射光の偏光方向の回転操作を行うためのユーザインタフェース画像を表示する
請求項2に記載の撮像装置。 - 前記表示部では前記偏光画素または前記非偏光画素に関する信号強度分布を示す画像を表示する
請求項11に記載の撮像装置。 - 前記偏光回転部を制御する制御部をさらに備え、
前記制御部は、前記非偏光画素で信号強度の飽和を生じないように前記入射光の偏光方向を変化させる
請求項1に記載の撮像装置。 - 前記偏光回転部は、前記撮像部の入射面側に設けられて前記入射光のうち特定の偏波のみを通す偏光素子と、該偏光素子を任意の角度に回転する機構からなる
請求項1に記載の撮像装置。 - 入射光に基づいて画素信号を生成する複数の画素を、所定の偏光方向の偏光画素と非偏光画素で構成した撮像部に、偏光回転部を介した前記入射光が入射されて、前記入射光の偏光方向の回転位置に応じたダイナミックレンジで撮像画の画像信号を生成すること
を含む撮像方法。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016160549A JP2018029280A (ja) | 2016-08-18 | 2016-08-18 | 撮像装置と撮像方法 |
| PCT/JP2017/028918 WO2018034211A1 (en) | 2016-08-18 | 2017-08-09 | Imaging device and imaging method |
| EP17758644.3A EP3501166A1 (en) | 2016-08-18 | 2017-08-09 | Imaging device and imaging method |
| CN201780047338.4A CN109565550A (zh) | 2016-08-18 | 2017-08-09 | 成像设备和成像方法 |
| US16/302,400 US10704957B2 (en) | 2016-08-18 | 2017-08-09 | Imaging device and imaging method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016160549A JP2018029280A (ja) | 2016-08-18 | 2016-08-18 | 撮像装置と撮像方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018029280A true JP2018029280A (ja) | 2018-02-22 |
| JP2018029280A5 JP2018029280A5 (ja) | 2019-08-29 |
Family
ID=59738394
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016160549A Pending JP2018029280A (ja) | 2016-08-18 | 2016-08-18 | 撮像装置と撮像方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10704957B2 (ja) |
| EP (1) | EP3501166A1 (ja) |
| JP (1) | JP2018029280A (ja) |
| CN (1) | CN109565550A (ja) |
| WO (1) | WO2018034211A1 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101891631B1 (ko) * | 2018-03-07 | 2018-08-27 | (주)크레아소프트 | 영상 학습 장치, 이를 이용한 촬영영상 분석 시스템 및 방법, 이를 수행하기 위한 기록매체 |
| WO2020213238A1 (ja) * | 2019-04-19 | 2020-10-22 | ソニー株式会社 | 撮像装置と画像処理装置および画像処理方法 |
| WO2021140873A1 (ja) * | 2020-01-09 | 2021-07-15 | ソニーグループ株式会社 | 画像処理装置と画像処理方法および撮像装置 |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109348195A (zh) * | 2018-11-30 | 2019-02-15 | 德淮半导体有限公司 | 图像传感器及其制造方法、成像方法以及成像设备 |
| CN110708453A (zh) * | 2019-11-12 | 2020-01-17 | Oppo广东移动通信有限公司 | 图像传感器、相机模组、终端和成像方法 |
| US10924689B1 (en) | 2019-11-22 | 2021-02-16 | Karl Storz Imaging, Inc. | Method and apparatus to improve high dynamic range image capture using image sensor with polarization |
| US11254316B2 (en) | 2020-01-24 | 2022-02-22 | Ford Global Technologies, Llc | Driver distraction detection |
| US11689813B2 (en) * | 2021-07-01 | 2023-06-27 | Intrinsic Innovation Llc | Systems and methods for high dynamic range imaging using crossed polarizers |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001157109A (ja) * | 1999-11-24 | 2001-06-08 | Nikon Corp | 電子カメラおよび画像データ処理用記録媒体 |
| WO2009147814A1 (ja) * | 2008-06-02 | 2009-12-10 | パナソニック株式会社 | 法線情報を生成する画像処理装置、方法、コンピュータプログラム、および、視点変換画像生成装置 |
| WO2009157129A1 (ja) * | 2008-06-26 | 2009-12-30 | パナソニック株式会社 | 画像処理装置、画像分割プログラムおよび画像合成方法 |
| JP2011237646A (ja) * | 2010-05-11 | 2011-11-24 | Panasonic Corp | 3次元撮像装置 |
| JP2014220754A (ja) * | 2013-05-10 | 2014-11-20 | 独立行政法人国立高等専門学校機構 | 撮像装置および撮像方法 |
| JP2015055737A (ja) * | 2013-09-11 | 2015-03-23 | ソニー株式会社 | 透過光量調整装置及び透過光量調整方法 |
Family Cites Families (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10268249A (ja) | 1997-03-21 | 1998-10-09 | Nippon Hoso Kyokai <Nhk> | 偏光回転素子 |
| US7682850B2 (en) * | 2006-03-17 | 2010-03-23 | Philips Lumileds Lighting Company, Llc | White LED for backlight with phosphor plates |
| CN103152582B (zh) * | 2007-12-07 | 2015-02-25 | 松下电器产业株式会社 | 图像处理装置、图像处理方法 |
| US7964840B2 (en) * | 2008-06-19 | 2011-06-21 | Omnivision Technologies, Inc. | High dynamic range image sensor including polarizer and microlens |
| CN102292980B (zh) * | 2008-11-25 | 2015-04-01 | 泰特拉维公司 | 高分辨率三维成像的系统和方法 |
| JP5428509B2 (ja) * | 2009-05-11 | 2014-02-26 | ソニー株式会社 | 2次元固体撮像装置、及び、2次元固体撮像装置における偏光光データ処理方法 |
| JP5391914B2 (ja) * | 2009-08-06 | 2014-01-15 | ソニー株式会社 | 撮像装置および映像記録再生システム |
| JP2011244309A (ja) | 2010-05-20 | 2011-12-01 | Sony Corp | 画像処理装置、画像処理方法及びプログラム |
| JP5454424B2 (ja) * | 2010-09-03 | 2014-03-26 | ソニー株式会社 | 撮像方法 |
| JP2013031054A (ja) * | 2011-07-29 | 2013-02-07 | Ricoh Co Ltd | 撮像装置及びこれを備えた物体検出装置、並びに、光学フィルタ及びその製造方法 |
| JP5831024B2 (ja) * | 2011-08-04 | 2015-12-09 | ソニー株式会社 | 画像処理装置、および画像処理方法、並びにプログラム |
| JP5982751B2 (ja) * | 2011-08-04 | 2016-08-31 | ソニー株式会社 | 画像処理装置、および画像処理方法、並びにプログラム |
| JP5950196B2 (ja) * | 2011-08-30 | 2016-07-13 | 株式会社リコー | 撮像装置、並びに、これを用いる画像解析装置及び移動装置 |
| CN103460024B (zh) * | 2012-02-03 | 2017-09-22 | 松下知识产权经营株式会社 | 摄像装置和摄像系统 |
| JP6417666B2 (ja) * | 2013-05-15 | 2018-11-07 | 株式会社リコー | 画像処理システム |
| US20160124250A1 (en) * | 2013-05-23 | 2016-05-05 | President And Fellows Of Harvard College | Pixelated tunable color filter |
| JP2015114307A (ja) * | 2013-12-16 | 2015-06-22 | ソニー株式会社 | 画像処理装置と画像処理方法および撮像装置 |
| WO2016088483A1 (ja) * | 2014-12-01 | 2016-06-09 | ソニー株式会社 | 画像処理装置と画像処理方法 |
| JP6693514B2 (ja) * | 2015-04-30 | 2020-05-13 | ソニー株式会社 | 画像処理装置と画像処理方法およびプログラム |
| JP6914001B2 (ja) * | 2015-08-12 | 2021-08-04 | 株式会社ソニー・インタラクティブエンタテインメント | 撮像素子、イメージセンサ、撮像装置、および情報処理装置 |
| JP6750633B2 (ja) * | 2015-11-10 | 2020-09-02 | ソニー株式会社 | 画像処理装置と画像処理方法 |
| WO2017099253A1 (ja) * | 2015-12-11 | 2017-06-15 | 株式会社ニコン | 偏光特性画像計測装置、偏光特性画像計測方法 |
| JP2018029279A (ja) * | 2016-08-18 | 2018-02-22 | ソニー株式会社 | 撮像装置と撮像方法 |
| US10750136B2 (en) * | 2016-10-17 | 2020-08-18 | Sony Corporation | Image processing apparatus, image processing method, and image pickup device |
| CN110291773B (zh) * | 2017-02-15 | 2021-06-29 | 索尼公司 | 信息处理装置、信息处理方法和成像装置 |
-
2016
- 2016-08-18 JP JP2016160549A patent/JP2018029280A/ja active Pending
-
2017
- 2017-08-09 CN CN201780047338.4A patent/CN109565550A/zh active Pending
- 2017-08-09 EP EP17758644.3A patent/EP3501166A1/en not_active Withdrawn
- 2017-08-09 WO PCT/JP2017/028918 patent/WO2018034211A1/en unknown
- 2017-08-09 US US16/302,400 patent/US10704957B2/en active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001157109A (ja) * | 1999-11-24 | 2001-06-08 | Nikon Corp | 電子カメラおよび画像データ処理用記録媒体 |
| WO2009147814A1 (ja) * | 2008-06-02 | 2009-12-10 | パナソニック株式会社 | 法線情報を生成する画像処理装置、方法、コンピュータプログラム、および、視点変換画像生成装置 |
| WO2009157129A1 (ja) * | 2008-06-26 | 2009-12-30 | パナソニック株式会社 | 画像処理装置、画像分割プログラムおよび画像合成方法 |
| JP2011237646A (ja) * | 2010-05-11 | 2011-11-24 | Panasonic Corp | 3次元撮像装置 |
| JP2014220754A (ja) * | 2013-05-10 | 2014-11-20 | 独立行政法人国立高等専門学校機構 | 撮像装置および撮像方法 |
| JP2015055737A (ja) * | 2013-09-11 | 2015-03-23 | ソニー株式会社 | 透過光量調整装置及び透過光量調整方法 |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101891631B1 (ko) * | 2018-03-07 | 2018-08-27 | (주)크레아소프트 | 영상 학습 장치, 이를 이용한 촬영영상 분석 시스템 및 방법, 이를 수행하기 위한 기록매체 |
| WO2020213238A1 (ja) * | 2019-04-19 | 2020-10-22 | ソニー株式会社 | 撮像装置と画像処理装置および画像処理方法 |
| US11997398B2 (en) | 2019-04-19 | 2024-05-28 | Sony Group Corporation | Imaging apparatus, image processing apparatus, and image processing method |
| WO2021140873A1 (ja) * | 2020-01-09 | 2021-07-15 | ソニーグループ株式会社 | 画像処理装置と画像処理方法および撮像装置 |
| US11758290B2 (en) | 2020-01-09 | 2023-09-12 | Sony Group Corporation | Image processing device, image processing method, and image pickup device |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2018034211A1 (en) | 2018-02-22 |
| CN109565550A (zh) | 2019-04-02 |
| US10704957B2 (en) | 2020-07-07 |
| US20190170586A1 (en) | 2019-06-06 |
| EP3501166A1 (en) | 2019-06-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7047767B2 (ja) | 画像処理装置と画像処理方法 | |
| JP7040447B2 (ja) | 画像処理装置および情報生成装置と情報生成方法 | |
| US10704957B2 (en) | Imaging device and imaging method | |
| US11056518B2 (en) | Imaging apparatus and imaging method | |
| JP6977821B2 (ja) | 画像処理装置と画像処理方法 | |
| JP7024782B2 (ja) | 画像処理装置と画像処理方法および撮像装置 | |
| WO2018163725A1 (ja) | 画像処理装置、および画像処理方法、並びにプログラム | |
| US10877288B2 (en) | Imaging device and imaging method | |
| JP6977722B2 (ja) | 撮像装置、および画像処理システム | |
| JP6816769B2 (ja) | 画像処理装置と画像処理方法 | |
| JP6816768B2 (ja) | 画像処理装置と画像処理方法 | |
| JP2018207453A (ja) | 制御装置、撮像装置、制御方法、プログラム及び撮像システム | |
| JPWO2018150683A1 (ja) | 情報処理装置と情報処理方法とプログラムおよび撮像装置 | |
| WO2018008408A1 (ja) | 固体撮像装置、補正方法、および電子装置 | |
| JP6981416B2 (ja) | 画像処理装置と画像処理方法 | |
| WO2019215979A1 (ja) | 画像処理装置、車載装置、画像処理方法及びプログラム | |
| JP7173056B2 (ja) | 認識装置と認識方法およびプログラム | |
| WO2021229983A1 (ja) | 撮像装置及びプログラム | |
| US20230412923A1 (en) | Signal processing device, imaging device, and signal processing method | |
| US10791287B2 (en) | Imaging control apparatus and method, and vehicle |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190716 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190716 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200127 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200204 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200401 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20200630 |