WO2019215979A1 - 画像処理装置、車載装置、画像処理方法及びプログラム - Google Patents
画像処理装置、車載装置、画像処理方法及びプログラム Download PDFInfo
- Publication number
- WO2019215979A1 WO2019215979A1 PCT/JP2019/005225 JP2019005225W WO2019215979A1 WO 2019215979 A1 WO2019215979 A1 WO 2019215979A1 JP 2019005225 W JP2019005225 W JP 2019005225W WO 2019215979 A1 WO2019215979 A1 WO 2019215979A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- search range
- motion vector
- vehicle
- image
- unit
- Prior art date
Links
- 238000012545 processing Methods 0.000 title claims abstract description 47
- 238000003672 processing method Methods 0.000 title claims description 9
- 230000033001 locomotion Effects 0.000 claims abstract description 141
- 239000013598 vector Substances 0.000 claims abstract description 104
- 238000003384 imaging method Methods 0.000 claims description 55
- 230000002093 peripheral effect Effects 0.000 claims description 22
- 238000001514 detection method Methods 0.000 description 75
- 238000000034 method Methods 0.000 description 54
- 238000004891 communication Methods 0.000 description 44
- 230000008569 process Effects 0.000 description 35
- 238000010586 diagram Methods 0.000 description 14
- 238000006073 displacement reaction Methods 0.000 description 12
- 230000006870 function Effects 0.000 description 11
- 238000013139 quantization Methods 0.000 description 11
- 230000000694 effects Effects 0.000 description 8
- 102100029860 Suppressor of tumorigenicity 20 protein Human genes 0.000 description 5
- 238000012986 modification Methods 0.000 description 5
- 230000004048 modification Effects 0.000 description 5
- 238000004364 calculation method Methods 0.000 description 4
- 238000005516 engineering process Methods 0.000 description 4
- 238000000605 extraction Methods 0.000 description 4
- 230000007246 mechanism Effects 0.000 description 4
- 230000003287 optical effect Effects 0.000 description 4
- 230000009467 reduction Effects 0.000 description 4
- 102100035353 Cyclin-dependent kinase 2-associated protein 1 Human genes 0.000 description 3
- 238000013459 approach Methods 0.000 description 3
- 238000004590 computer program Methods 0.000 description 3
- 239000004065 semiconductor Substances 0.000 description 3
- 230000000007 visual effect Effects 0.000 description 3
- 230000001133 acceleration Effects 0.000 description 2
- 230000010267 cellular communication Effects 0.000 description 2
- 238000002485 combustion reaction Methods 0.000 description 2
- 230000007613 environmental effect Effects 0.000 description 2
- 238000009434 installation Methods 0.000 description 2
- 230000005236 sound signal Effects 0.000 description 2
- 101000760620 Homo sapiens Cell adhesion molecule 1 Proteins 0.000 description 1
- 101000661807 Homo sapiens Suppressor of tumorigenicity 14 protein Proteins 0.000 description 1
- 101000585359 Homo sapiens Suppressor of tumorigenicity 20 protein Proteins 0.000 description 1
- 230000003190 augmentative effect Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 230000006835 compression Effects 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 238000001816 cooling Methods 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 239000000284 extract Substances 0.000 description 1
- 108090000237 interleukin-24 Proteins 0.000 description 1
- 230000007774 longterm Effects 0.000 description 1
- 229910044991 metal oxide Inorganic materials 0.000 description 1
- 150000004706 metal oxides Chemical class 0.000 description 1
- 230000000116 mitigating effect Effects 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 238000010295 mobile communication Methods 0.000 description 1
- 238000004904 shortening Methods 0.000 description 1
Images










Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/20—Analysis of motion
- G06T7/223—Analysis of motion using block-matching
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/20—Analysis of motion
- G06T7/223—Analysis of motion using block-matching
- G06T7/238—Analysis of motion using block-matching using non-full search, e.g. three-step search
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/20—Analysis of motion
- G06T7/292—Multi-camera tracking
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/58—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N7/00—Television systems
- H04N7/18—Closed-circuit television [CCTV] systems, i.e. systems in which the video signal is not broadcast
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2300/00—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle
- B60R2300/10—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the type of camera system used
- B60R2300/105—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the type of camera system used using multiple cameras
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2300/00—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle
- B60R2300/30—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the type of image processing
- B60R2300/302—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the type of image processing combining image information with GPS information or vehicle data, e.g. vehicle speed, gyro, steering angle data
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2300/00—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle
- B60R2300/80—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the intended use of the viewing arrangement
- B60R2300/8093—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the intended use of the viewing arrangement for obstacle warning
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30248—Vehicle exterior or interior
- G06T2207/30252—Vehicle exterior; Vicinity of vehicle
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Signal Processing (AREA)
- Studio Devices (AREA)
- Image Analysis (AREA)
- Mechanical Engineering (AREA)
Abstract
魚眼レンズの射影特性に応じて設定される動きベクトルの異なる探索範囲を、移動体の移動速度に応じて切り替える制御部を有する画像処理装置である。
Description
本開示は、画像処理装置、車載装置、画像処理方法及びプログラムに関する。
車両に搭載したカメラを使用して、車両の前方に存在する物体を検出する技術が知られている。例えば、下記の特許文献1には、魚眼レンズを使用したカメラにより、車両の前方に存在する物体を検出する技術が記載されている。
しかしながら、特許文献1には、物体を検出する物体検出システムが魚眼レンズの特性を利用した処理を行う点についての記載はない。
本開示は、魚眼レンズの特性を利用した処理を行う画像処理装置、車載装置、画像処理方法及びプログラムを提供することを目的の一つとする。
本開示は、例えば、
魚眼レンズの射影特性に応じて設定される動きベクトルの異なる探索範囲を、移動体の移動速度に応じて切り替える制御部を有する
画像処理装置である。
魚眼レンズの射影特性に応じて設定される動きベクトルの異なる探索範囲を、移動体の移動速度に応じて切り替える制御部を有する
画像処理装置である。
本開示は、例えば、
魚眼レンズと、
撮像部と、
魚眼レンズ及び撮像部により得られる画像に基づいて、動きベクトルを検出するための探索範囲を設定する制御部と
を有し、
制御部は、魚眼レンズの射影特性に応じて設定される動きベクトルの異なる探索範囲を、移動体の移動速度に応じて切り替える
車載機器である。
魚眼レンズと、
撮像部と、
魚眼レンズ及び撮像部により得られる画像に基づいて、動きベクトルを検出するための探索範囲を設定する制御部と
を有し、
制御部は、魚眼レンズの射影特性に応じて設定される動きベクトルの異なる探索範囲を、移動体の移動速度に応じて切り替える
車載機器である。
本開示は、例えば
制御部が、魚眼レンズの射影特性に応じて設定される動きベクトルの異なる探索範囲を、移動体の移動速度に応じて切り替える
画像処理方法である。
制御部が、魚眼レンズの射影特性に応じて設定される動きベクトルの異なる探索範囲を、移動体の移動速度に応じて切り替える
画像処理方法である。
本開示は、例えば
制御部が、魚眼レンズの射影特性に応じて設定される動きベクトルの異なる探索範囲を、移動体の移動速度に応じて切り替える
画像処理方法をコンピュータに実行させるプログラムである。
制御部が、魚眼レンズの射影特性に応じて設定される動きベクトルの異なる探索範囲を、移動体の移動速度に応じて切り替える
画像処理方法をコンピュータに実行させるプログラムである。
本開示の少なくとも一つの実施の形態によれば、魚眼レンズの特性を利用した処理を行うができる。なお、ここに記載された効果は必ずしも限定されるものではなく、本開示中に記載されたいずれの効果であっても良い。また、例示された効果により本開示の内容が限定して解釈されるものではない。
以下、本開示の実施の形態等について図面を参照しながら説明する。なお、説明は以下の順序で行う。
<魚眼レンズの特性について>
<一実施の形態>
<変形例>
<応用例>
以下に説明する実施の形態等は本開示の好適な具体例であり、本開示の内容がこれらの実施の形態等に限定されるものではない。
<魚眼レンズの特性について>
<一実施の形態>
<変形例>
<応用例>
以下に説明する実施の形態等は本開示の好適な具体例であり、本開示の内容がこれらの実施の形態等に限定されるものではない。
<魚眼レンズの特性について>
始めに、本開示の理解を容易とするために、魚眼レンズの特性について説明する。魚眼レンズとは、画角180度の範囲を撮影することが可能なレンズである。画角180度の範囲を撮影面に投射する方式として複数の方式が知られているものの、本例では、等距離射影と呼ばれる方式に基づいて説明する。
始めに、本開示の理解を容易とするために、魚眼レンズの特性について説明する。魚眼レンズとは、画角180度の範囲を撮影することが可能なレンズである。画角180度の範囲を撮影面に投射する方式として複数の方式が知られているものの、本例では、等距離射影と呼ばれる方式に基づいて説明する。
魚眼レンズの特性として、周辺部ほど圧縮されて歪んだ画像が得られる点が挙げられる。このため、画像周辺部より中心部の動きが大きく見える傾向がある。一方、車載機器に魚眼レンズを適用した場合には、車両の基本的な動きである前進または後退の1次元的な動きにより視野が変化する。この場合、画像中心部より周辺部の動きが大きく見えるという魚眼レンズの特性が挙げられる。
(魚眼レンズの第1の射影特性)
係る魚眼レンズを通して見る対象物の移動が投射面上である撮影面上(撮像素子面上)にどのように投影されるかという魚眼レンズの射影特性について説明する。図1Aに示すように、撮影点P1から距離l離れた面上に対象物があり、当該面の中心から対象物までの距離がxであり、当該対象物を見る角度(視角)がθであるとする。図1Bに示すように、魚眼レンズを通した投射面上では、中心から距離θ離れた場所にxが投射(投影)される。
係る魚眼レンズを通して見る対象物の移動が投射面上である撮影面上(撮像素子面上)にどのように投影されるかという魚眼レンズの射影特性について説明する。図1Aに示すように、撮影点P1から距離l離れた面上に対象物があり、当該面の中心から対象物までの距離がxであり、当該対象物を見る角度(視角)がθであるとする。図1Bに示すように、魚眼レンズを通した投射面上では、中心から距離θ離れた場所にxが投射(投影)される。
ここで、撮影面上での中心から対象物までの距離lは、撮影点P1から対象物を見る角度θに比例する。対象物の移動距離をxとすると、下記の数式1が成り立つ。
数式1に基づいて、撮影点P1から距離l離れた面上を移動する対象物の変位dxをθの変位dθで表すと、下記の数式2が得られる。
数式2から次のことがわかる。即ち、θの変位に対して、
θ=0°(撮影点P1の正面)付近ではxの変位が小さい。
また、θ=90°(撮影点P1の真横方向)付近ではxの変位が大きい。換言すれば、xの変位がθに伝わらない。
これは、対象物が中心から離れるほど、対象物の移動距離が撮影面上では圧縮されることを意味する。係る魚眼レンズの射影特性を第1の射影特性と適宜、称する。
θ=0°(撮影点P1の正面)付近ではxの変位が小さい。
また、θ=90°(撮影点P1の真横方向)付近ではxの変位が大きい。換言すれば、xの変位がθに伝わらない。
これは、対象物が中心から離れるほど、対象物の移動距離が撮影面上では圧縮されることを意味する。係る魚眼レンズの射影特性を第1の射影特性と適宜、称する。
(魚眼レンズの第2の射影特性)
次に、魚眼レンズで撮影しながら撮影者(例えば、車両等の移動体)が対象物に接近する場合を考える。図2に示すように、撮影点P1から距離l離れた面上に対象物があり、その面の中心から対象物までの距離をxとする。距離lは、下記の数式3によって表すことができる。
次に、魚眼レンズで撮影しながら撮影者(例えば、車両等の移動体)が対象物に接近する場合を考える。図2に示すように、撮影点P1から距離l離れた面上に対象物があり、その面の中心から対象物までの距離をxとする。距離lは、下記の数式3によって表すことができる。
対象物が静止(xが固定値)であるときの、距離lと視角θの変位量との関係について、下記の数式4が成り立つ。
数式4から下記の数式5が導かれる。
数式5から次のことがわかる。即ち、θの変位に対して、
θ=45°付近ではlの変位が小さい。
また、θ=0°(撮影点P1の正面)及び90°(撮影点P1の真横方向)ではlの変位が大きい。換言すれば、lの変位がθに伝わらない。
これは、対象物が45度の方向に見えている状態で撮影者が前進すると、撮影面上で対象物が大きく動くことを意味する。係る魚眼レンズの射影特性を第2の射影特性と適宜、称する。
θ=45°付近ではlの変位が小さい。
また、θ=0°(撮影点P1の正面)及び90°(撮影点P1の真横方向)ではlの変位が大きい。換言すれば、lの変位がθに伝わらない。
これは、対象物が45度の方向に見えている状態で撮影者が前進すると、撮影面上で対象物が大きく動くことを意味する。係る魚眼レンズの射影特性を第2の射影特性と適宜、称する。
(魚眼レンズの射影特性のまとめ)
魚眼レンズの第1の射影特性によれば、撮影者が静止しており、且つ、対象物が動いている場合、画面中心部に見えている対象物の動きが撮影面上で大きく投影されることになる。
また、魚眼レンズの第2の射影特性によれば、対象物が静止しており、且つ、撮影者が動いている場合、45度方向に見えている対象物の動きが撮影面上で大きく投影されることになる。
上記いずれの場合でも、縁の方に見えている対象物の動きは撮影面上で小さく投影されることになる。
魚眼レンズの第1の射影特性によれば、撮影者が静止しており、且つ、対象物が動いている場合、画面中心部に見えている対象物の動きが撮影面上で大きく投影されることになる。
また、魚眼レンズの第2の射影特性によれば、対象物が静止しており、且つ、撮影者が動いている場合、45度方向に見えている対象物の動きが撮影面上で大きく投影されることになる。
上記いずれの場合でも、縁の方に見えている対象物の動きは撮影面上で小さく投影されることになる。
ここで、魚眼レンズを使用した撮影により得られる画像に基づいて、動き検出を行うことを考える。動き検出では、現在のフレームと、前(例えば、直前)のフレームとを比較し、動きベクトルを検出する処理が行われる。動きベクトルとは、画面内の被写体が動いた分の移動方向と移動量とを示す値である。動きベクトルを検出する代表的な手法としてブロック・マッチング法が挙げられる。ブロック・マッチング法とは、現在のフレームにおける所定のブロック(m画素×n画素からなる矩形のブロック)と、前のフレームの同位置のブロック周辺の画素とを、設定された探索範囲内で比較し、その結果に基づいて動きベクトルを求める方法である。探索範囲を広くすることにより動きベクトルの検出精度が向上するものの、演算量が多くなり且つ多くのメモリ容量も必要とされる。従って、動きベクトルの検出精度を低下させることなく、探索範囲を小さくできることが好ましい。
そこで、本開示の実施の形態では、上述した魚眼レンズの射影特性を踏まえて、動きベクトルの探索範囲を設定する。魚眼レンズの第1の射影特性から、中心から離れた対象物の動きは撮影面上では小さく投影されることが示された。この第1の射影特性によれば、撮影側が静止若しくは低速での移動の場合には、所定のブロックに対応するブロックが、前フレームにおける当該所定のブロックの位置の近傍で検索される可能性が高くなる。従って、画面周辺部では、動きベクトルの探索範囲を小さくすることができる。
また、魚眼レンズの第2の射影特性から、対象物が正面(0度方向)または真横(90度方向)に見えているときは撮影面上での対象物の動きは小さいことが示された。この第2の射影特性によれば、撮影者が移動している場合には、画面中央部と周辺部とでは、所定のブロックに対応するブロックが、前フレームにおける当該所定のブロックの位置の近傍で検索される可能性が高くなる。従って、画面中央部及び周辺部では、動きベクトルの探索範囲を小さくすることができる。
魚眼レンズの第1の射影特性は、移動体が停止又低速の場合に表れる。また、魚眼レンズの第2の射影特性は、移動体が移動する場合に表れる。従って、魚眼レンズを移動体の車載機器に対して適用した場合には、移動体の移動速度に応じて、動きベクトルの探索範囲を設定すれば、動きベクトルの探索範囲を最適化することができ、処理を効率化することができる。以上を踏まえ、本開示の実施の形態について詳細に説明する。
<一実施の形態>
次に、一実施の形態について説明する。一実施の形態では、移動体として、自動車を例に説明する。移動体は、少なくとも一方向への動き(例えば、前進、後退)が可能なものであれば、電車、バイク、自転車等であっても構わない。また、一実施の形態では、本開示の画像処理装置が適用される機器として、車載機器、より具体的には、自動車の移動中に撮影された画像を記録するドライブレコーダを例にして説明する。
次に、一実施の形態について説明する。一実施の形態では、移動体として、自動車を例に説明する。移動体は、少なくとも一方向への動き(例えば、前進、後退)が可能なものであれば、電車、バイク、自転車等であっても構わない。また、一実施の形態では、本開示の画像処理装置が適用される機器として、車載機器、より具体的には、自動車の移動中に撮影された画像を記録するドライブレコーダを例にして説明する。
[ドライブレコーダ]
(ドライブレコーダの構成例)
図3は、一実施の形態に係るドライブレコーダ(ドライブレコーダ1)の構成例を示すブロック図である。ドライブレコーダ1は、例えば、魚眼レンズ2、撮像部3、制御部4、メモリ部5及び車速センサ6を有している。
(ドライブレコーダの構成例)
図3は、一実施の形態に係るドライブレコーダ(ドライブレコーダ1)の構成例を示すブロック図である。ドライブレコーダ1は、例えば、魚眼レンズ2、撮像部3、制御部4、メモリ部5及び車速センサ6を有している。
魚眼レンズ2は、画角180度の範囲を撮影することが可能なレンズである。魚眼レンズ2は、上述した第1及び第2射影特性を有している。
撮像部3は、魚眼レンズ2を介して得られる光を電気信号に変換する撮像素子である。撮像部3としては、CMOS(Complementary Metal Oxide Semiconductor)センサやCCD(Charge Coupled Device)センサが挙げられる。
制御部4は、ドライブレコーダ1の各部を制御する。例えば、制御部4は、撮像部3から入力される画像信号をデジタル信号に変換し、デジタル画像信号に対して種々の画像処理を行う。また、制御部4は、魚眼レンズの射影特性に応じて設定される動きベクトルの異なる探索範囲を、移動体の移動速度に応じて切り替える。
本実施の形態に係る制御部4は、例えば、ROM(Read Only Memory)4a、RAM(Random Access Memory)4b、探索範囲設定部4c及び画像符号化部4dを有している。ROM4aには、制御部4により実行されるプログラムが格納されている。RAM4bは、制御部4がプログラムを実行する際のワークメモリとして使用される。探索範囲設定部4cは、自動車の車速に応じて、動きベクトルの探索範囲を設定し、動きベクトルの探索範囲を示す探索範囲設定情報を出力する。画像符号化部4dは、撮像部3から入力される画像を符号化する。本実施の形態に係る画像符号化部4dは、H.264/AVC(Audio Video Coding)と呼ばれる方式で画像信号を符号化する。なお、符号化方式はH.264/AVCに限定されるものではなく、ブロック・マッチング法により動きベクトルを検出する他の符号化方式を適用することが可能である。符号化された画像信号は、制御部4の制御に応じてメモリ部5に記憶される。
メモリ部5は、各種の情報を記憶する記憶部である。メモリ部5としては、例えば、HDD(Hard Disk Drive)等の磁気記憶デバイス、半導体記憶デバイス、光記憶デバイス、光磁気記憶デバイス等が挙げられる。メモリ部5は、ドライブレコーダ1に内蔵されるものでも良いし、ドライブレコーダ1に着脱自在とされるものでも良いし、その両方であっても良い。
車速センサ6は、自動車の移動速度である車速を検出するセンサである。車速センサ6により検出された車速を示す車速情報が制御部4に入力される。
(画像符号化部の構成例)
図4は、画像符号化部4dの構成例を示すブロック図である。なお、H.264/AVCの符号化方法そのものは公知であるので、画像符号化部4dの構成については、概略的な説明に留める。
図4は、画像符号化部4dの構成例を示すブロック図である。なお、H.264/AVCの符号化方法そのものは公知であるので、画像符号化部4dの構成については、概略的な説明に留める。
画像符号化部4dは、例えば、符号化制御部401、DCT(Discrete Cosine Transform)量子化部402、可変長符号化部403、逆量子化部404、デブロッキングフィルタ405、フレームメモリ406、動き補償部407、重み付き予測部408、画面内予測部409、動きベクトル検出部410、スイッチ411、減算器412及び加算器413を有している。
符号化制御部401は、量子化特定を指定する情報等をDCT量子化部402に設定する他、画像信号を符号化する際の各種の制御を行う。DCT量子化部402は、DCTによる量子化を行い、可変長符号化部403は、DCT量子化部402により量子化された情報に適切な符号(ビット)を割り当てる可変長符号を行う。逆量子化部404は、DCT量子化部402により量子化された画像を逆量子化する。デブロッキングフィルタ405は、画像を符号化した際に生じるブロック歪みを減少させるフィルタである。フレームメモリ406は、受信側で再生される画像と同じ画像を一時的に蓄積するメモリである。フレームメモリ406に蓄積された画像は、次の入力画像の圧縮時等において参照される。
動き補償部407は、動きベクトル検出部410により検出された動きベクトルに基づく動き補償を行う。重み付き予測部408は、動き補償を行った画像信号に一定の係数ではなく、適応的に重み係数をかけ算して予測信号を生成する。画面内予測部409は、フレーム内モードが選択されている場合に、現在のフレーム内だけで当該フレームを圧縮符号化する。動きベクトル検出部410は、入力画像を使用して動きベクトルを検出する。動きベクトル検出部410には、探索範囲設定部4cから供給される探索範囲設定情報により指定された探索範囲において、動きベクトルを検出する。
スイッチ411は、上述したフレーム内モードと、前後のフレーム間の動きの差を利用して圧縮符号化するフレーム間モードとを切り替えるスイッチである。減算器412は、入力画像とスイッチ411から供給される画像(予測画像)との差分を計算する。加算器413は、入力画像と逆量子化部404の出力とを加算する。
(ドライブレコーダの動作例)
ドライブレコーダ1の動作例について、概略的に説明する。自動車の走行中に、魚眼レンズ2及び撮像部3により得られる画像に対して、制御部4による画像処理が行われる。そして、制御部4の画像符号化部4dにより符号化された画像がメモリ部5により記憶される。これにより、自動車が走行中の動画をメモリ部5に記憶することができる。なお、メモリ部5に記憶される動画は、本実施の形態では自動車の前方を撮影した動画として説明するが、自動車の後方等、任意の方向を撮影した動画でも良い。また、本実施の形態では、自動車の走行中だけでなく、自動車の使用時における停車中にも撮影がなされる。自動車の不使用時における停車の際に撮影がなされても良い。
ドライブレコーダ1の動作例について、概略的に説明する。自動車の走行中に、魚眼レンズ2及び撮像部3により得られる画像に対して、制御部4による画像処理が行われる。そして、制御部4の画像符号化部4dにより符号化された画像がメモリ部5により記憶される。これにより、自動車が走行中の動画をメモリ部5に記憶することができる。なお、メモリ部5に記憶される動画は、本実施の形態では自動車の前方を撮影した動画として説明するが、自動車の後方等、任意の方向を撮影した動画でも良い。また、本実施の形態では、自動車の走行中だけでなく、自動車の使用時における停車中にも撮影がなされる。自動車の不使用時における停車の際に撮影がなされても良い。
[動きベクトルの探索範囲について]
次に、本実施の形態において設定される動きベクトルの探索範囲について説明する。動きベクトルの探索範囲としては、第1及び第2の探索範囲が設定可能とされている。動きベクトルの第1の探索範囲は、自動車の車速が閾値より小さい低速(停止を含む)の場合に設定される。動きベクトルの第2の探索範囲は、自動車の車速が閾値より大きい高速の場合に設定される。
次に、本実施の形態において設定される動きベクトルの探索範囲について説明する。動きベクトルの探索範囲としては、第1及び第2の探索範囲が設定可能とされている。動きベクトルの第1の探索範囲は、自動車の車速が閾値より小さい低速(停止を含む)の場合に設定される。動きベクトルの第2の探索範囲は、自動車の車速が閾値より大きい高速の場合に設定される。
魚眼レンズ2を介して得られる画像が、自動車と撮影対象物とがなす角度(自動車から見た視角)に応じて、複数の領域に分割される。そして、第1、第2の探索範囲のそれぞれにおいて、領域毎に動きベクトルの探索範囲が設定される。
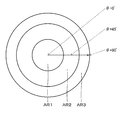
魚眼レンズ2を介して得られる全周魚眼画像は撮影面上に円状の形に投影される。係る全周魚眼画像を、図5に示すように、例えば、中央部AR1、中間部AR2及び周辺部AR3の3領域に分割する。中央部AR1は、自動車と対象物とがなす角度が0度、即ち、自動車の正面付近における画像領域を含む。中間部AR2は、自動車と対象物とがなす角度が45度における画像領域を含む。周辺部AR3は、自動車と対象物とがなす角度が90度、即ち、自動車の真横付近における画像領域を含む。各角度に対応する撮像部3の撮像素子上の投影位置は予め決まっているので、各領域を適切に設定することができる。その他の公知の手法を用いて各領域が設定されても良い。
なお、魚眼レンズを使用するシステムでは、全周魚眼画像よりも対角魚眼画像を用いる場合が多い。対角魚眼画像とは、図6に示すように、全周魚眼画像に内接する矩形の画像であり、対角線方向に180°の画角を持つ。得られる画像が矩形であり、撮像部3の撮像素子の領域全てを使うことができるので、後段における画像処理がし易くなる。図7に示すように、対角魚眼画像の場合も中央部AR1、中間部AR2及び周辺部AR3の3領域に分割することができる。この場合は、中央部AR1、中間部AR2及び周辺部AR3は、各画素の水平座標だけで簡易的に長方形に区切ることができる。
なお、中央部AR1、中間部AR2及び周辺部AR3をどのような大きさで分割するかは適宜、設定できる。例えば、各画像領域の面積が略等しくなるように設定されても良い。また、自動車と対象物とがなす角度の範囲が各領域に設定されても良い。
(動きベクトルの第1の探索範囲について)
始めに、動きベクトルの第1の探索範囲について説明する。第1の探索範囲は、魚眼レンズ2の第1の射影特性に対応して設定される探索範囲である。魚眼レンズの第1の射影特性によれば、中心から離れた対象物は撮影面上の動きが小さくなる点については説明した通りである。つまり、同じ移動距離であっても、中心から離れた対象物の移動距離は撮影面上で小さく反映されることになることから、動きベクトルの探索範囲を小さく設定したとしても、フレーム間で所定のブロックに対応するブロックがすぐに見つかる可能性が高い。従って、第1の探索範囲としては、周辺部AR3における動きベクトルの探索範囲が、中央部AR1及び中間部AR2における動きベクトルの探索範囲に比べて小さくなるように設定される。
始めに、動きベクトルの第1の探索範囲について説明する。第1の探索範囲は、魚眼レンズ2の第1の射影特性に対応して設定される探索範囲である。魚眼レンズの第1の射影特性によれば、中心から離れた対象物は撮影面上の動きが小さくなる点については説明した通りである。つまり、同じ移動距離であっても、中心から離れた対象物の移動距離は撮影面上で小さく反映されることになることから、動きベクトルの探索範囲を小さく設定したとしても、フレーム間で所定のブロックに対応するブロックがすぐに見つかる可能性が高い。従って、第1の探索範囲としては、周辺部AR3における動きベクトルの探索範囲が、中央部AR1及び中間部AR2における動きベクトルの探索範囲に比べて小さくなるように設定される。
(動きベクトルの第2の探索範囲について)
始めに、動きベクトルの第2の探索範囲について説明する。第2の探索範囲は、魚眼レンズ2の第2の射影特性に対応して設定される探索範囲である。魚眼レンズの第2の射影特性によれば、自動車から見た対象物が正面(0度方向)または真横(90度方向)に見えているときは撮影面上での対象物の動きが小さく反映されることになることから、動きベクトルの探索範囲を小さく設定したとしても、フレーム間で所定のブロックに対応するブロックがすぐに見つかる可能性が高い。従って、第2の探索範囲として、中央部AR1及び周辺部AR3における動きベクトルの探索範囲が、中間部AR2における動きベクトルの探索範囲に比べて小さくなるように設定される。
始めに、動きベクトルの第2の探索範囲について説明する。第2の探索範囲は、魚眼レンズ2の第2の射影特性に対応して設定される探索範囲である。魚眼レンズの第2の射影特性によれば、自動車から見た対象物が正面(0度方向)または真横(90度方向)に見えているときは撮影面上での対象物の動きが小さく反映されることになることから、動きベクトルの探索範囲を小さく設定したとしても、フレーム間で所定のブロックに対応するブロックがすぐに見つかる可能性が高い。従って、第2の探索範囲として、中央部AR1及び周辺部AR3における動きベクトルの探索範囲が、中間部AR2における動きベクトルの探索範囲に比べて小さくなるように設定される。
[車速に対して設定される閾値]
上述したように、動きベクトルの第1の探索範囲は、自動車の車速が閾値より小さい低速(停止でも良い)の場合に設定される。また、動きベクトルの第2の探索範囲は、自動車の車速が閾値より大きい高速の場合に設定される。ここで、自動車の車速に対して設定される閾値の一例について説明する。
上述したように、動きベクトルの第1の探索範囲は、自動車の車速が閾値より小さい低速(停止でも良い)の場合に設定される。また、動きベクトルの第2の探索範囲は、自動車の車速が閾値より大きい高速の場合に設定される。ここで、自動車の車速に対して設定される閾値の一例について説明する。
一例として、人間の有効視野とされる水平30度付近に見える対象物を想定する。正面視からの角度としては左右15度になる。なお、有効視野とは、いくつか定義があるが、本例では、頭を動かさず前方一点を見ている状態で視覚情報を得られる範囲のことをいう。
上述した対象物の移動距離を示す数式2及び撮影側(本実施の形態では自動車)の移動距離を示す数式5のそれぞれにθ=15°を代入する。それぞれの計算の結果、撮影面上に現れる動き量(変位)dθへ与える影響には約3.7倍の差があることがわかる。
想定する対象物を歩行者とし、移動速度を4km/hと想定すれば(例えば、市街地における移動速度を想定)、自身の速度が15km/hより速くなれば動き量に対して支配的な影響を与え得る。従って、係る想定下では、車速に対する閾値として15km/h程度が設定される。なお、ここでの閾値は、有効視野内よりも、その外側の領域(45度方向)の動き検出を広く探索するべき閾値が15km/hということを意味する。
[処理の流れ]
次に、図8のフローチャートを参照して、一実施の形態に係るドライブレコーダ1で行われる処理の流れについて説明する。なお、特に断らない限り、以下に説明する処理は、例えば、制御部4によって行われる。
次に、図8のフローチャートを参照して、一実施の形態に係るドライブレコーダ1で行われる処理の流れについて説明する。なお、特に断らない限り、以下に説明する処理は、例えば、制御部4によって行われる。
処理が開始されると、ステップST11では、車速センサ6により自動車の車速が取得される。自動車の車速を示す車速情報が、車速センサ6から制御部4に対して供給される。なお、車速情報は、例えば、所定の周期でもって制御部4に入力される。そして、処理がステップST12に進む。
ステップST12では、制御部4が車速情報と閾値とを比較し、車速情報により示される車速が閾値より大きいか否かを判断する。ここで、例えば、車速が閾値以下の場合には、処理がステップST13に進む。以下の場合は、自動車の車速が停止又は低速であるため、動きベクトルの探索範囲として第1の探索範囲が設定される。
ステップST13では、現在のフレームにおける所定のブロックが中央部AR1に存在しているか否かが判断される。なお、所定のブロックが中央部AR1及び中間部AR2に跨がる場合等は、重なる領域が大きい方を当該ブロックが存在している領域として判断されるようにしても良い。所定のブロックが中央部AR1に存在する場合には、処理がステップST14に進む。
ステップST14では、制御部4の探索範囲設定部4cは、(前フレーム)において、所定のブロックに対応するブロックを探索する探索範囲を「大」に設定し、設定した探索範囲を探索範囲設定情報として動きベクトル検出部410に出力する。そして、処理がステップST18に進む。
ステップST18では、動きベクトル検出部410が探索範囲設定情報に基づく探索範囲でブロック・マッチングを行い、その結果に基づいて動きベクトルを検出する。そして、検出された動きベクトルを使用した符号化処理が画像符号化部4dにより行われる。なお、図示はしていないが、圧縮符号化された映像がメモリ部5に記憶される。
ステップST13の処理において、所定のブロックが中央部AR1に存在しない場合には、処理がステップST15に進む。ステップST15では、所定のブロックが中間部AR2に存在するか否かが判断される。所定のブロックが中間部AR2に存在する場合は、処理がステップST16に進む。
中間部AR2は、中央部AR1に比べて周辺側に位置する領域である。従って、ステップST16では、制御部4の探索範囲設定部4cが、前フレームにおいて所定のブロックに対応するブロックを探索する探索範囲として、ステップST14で設定される探索範囲より小さい「中」に設定し、設定した探索範囲を探索範囲設定情報として動きベクトル検出部410に出力する。そして、処理がステップST18に進む。ステップST18で行われる処理については上述した通りである。
ステップST15の処理において、所定のブロックが中間部AR2に存在しない場合には、当該所定のブロックが周辺部AR3に存在することになる。そして、処理がステップST17に進む。
ステップST17では、制御部4の探索範囲設定部4cが、前フレームにおいて所定のブロックに対応するブロックを探索する探索範囲として、ステップST14、ST16で設定される探索範囲より小さい「小」に設定し、設定した探索範囲を探索範囲設定情報として動きベクトル検出部410に出力する。そして、処理がステップST18に進む。ステップST18で行われる処理については上述した通りである。このように、車速が静止又は低速である場合には、所定のブロックの位置が画像の中央から周辺になるほど、動きベクトルの探索範囲が小さくなるように設定される。
一方、ステップST12の処理において、車速情報により示される車速が閾値より大きい場合には、処理がステップST19に進む。以下の場合は、自動車の車速が一定以上の高速であるため、動きベクトルの探索範囲として第2の探索範囲が設定される。
ステップST19では、現在のフレームにおける所定のブロックが中央部AR1に存在しているか否かが判断される。所定のブロックが中央部AR1に存在する場合には、処理がステップST20に進む。
ステップST20において、制御部4の探索範囲設定部4cは、前フレームにおいて、所定のブロックに対応するブロックを探索する探索範囲を「小」に設定し、設定した探索範囲を探索範囲設定情報として動きベクトル検出部410に出力する。なお、この動きベクトルの探索範囲である「小」は、上述したステップST17で設定される動きベクトルの探索範囲と同じ大きさでも良いし、異なる大きさでも良い。そして、処理がステップST18に進む。ステップST18の処理は上述してあるので重複した説明は省略する。
ステップST19の処理において、所定のブロックが中央部AR1に存在しない場合には、処理がステップST21に進む。ステップST21では、所定のブロックが中間部AR2に存在するか否かが判断される。所定のブロックが中間部AR2に存在する場合は、処理がステップST22に進む。
動きベクトルの第2の探索範囲では、中間部AR2の探索範囲が大きくされる。従って、ステップST20において、制御部4の探索範囲設定部4cは、前フレームにおいて、所定のブロックに対応するブロックを探索する探索範囲を、ステップST20で設定される探索範囲に比べて大きい「大」に設定し、設定した探索範囲を探索範囲設定情報として動きベクトル検出部410に出力する。なお、この動きベクトルの探索範囲である「大」は、上述したステップST14で設定される動きベクトルの探索範囲と同じ大きさでも良いし、異なる大きさでも良い。そして、処理がステップST18に進む。ステップST18の処理は上述してあるので重複した説明は省略する。
ステップST21の処理において、所定のブロックが中間部AR2に存在しない場合には、当該所定のブロックが周辺部AR3に存在することになる。そして、処理がステップST23に進む。
ステップST23において、制御部4の探索範囲設定部4cは、前フレームにおいて、所定のブロックに対応するブロックを探索する探索範囲を、ステップST22で設定される探索範囲に比べて小さい「小」に設定し、設定した探索範囲を探索範囲設定情報として動きベクトル検出部410に出力する。なお、この動きベクトルの探索範囲である「小」は、上述したステップST17、ST20で設定される動きベクトルの探索範囲と同じ大きさでも良いし、異なる大きさでも良い。そして、処理がステップST18に進む。ステップST18の処理は上述してあるので重複した説明は省略する。
なお、上述した説明では、説明の便宜を考慮して、探索範囲を「大」、「中」、「小」に区分して説明した。実際の探索範囲の大きさは、フレームメモリ406の容量、フレームメモリ406に対する制御部4のアクセス性能、メモリバスの許容範囲等を考慮して、適切に設定される。
[一実施の形態で得られる効果]
上述した一実施の形態では、例えば、以下の効果が得られる。魚眼レンズの射影特性を考慮した処理を行うことにより、移動体の車速に応じて、動きベクトルの探索範囲を最適化することができる。より具体的には、車速が低い場合には、対象物の動きが反映されやすい画面中央部を広く細かく探索することで動きベクトルを精度よく得られる。また、車速が低い場合には、対象物の動きが圧縮される画面周辺部に対し動きベクトルの探索範囲を制限することで処理時間の短縮とメモリアクセス帯域の削減、消費電力の低減等の効果が得られる。
上述した一実施の形態では、例えば、以下の効果が得られる。魚眼レンズの射影特性を考慮した処理を行うことにより、移動体の車速に応じて、動きベクトルの探索範囲を最適化することができる。より具体的には、車速が低い場合には、対象物の動きが反映されやすい画面中央部を広く細かく探索することで動きベクトルを精度よく得られる。また、車速が低い場合には、対象物の動きが圧縮される画面周辺部に対し動きベクトルの探索範囲を制限することで処理時間の短縮とメモリアクセス帯域の削減、消費電力の低減等の効果が得られる。
一方、車速が速い場合には、自動車の動きによる動きベクトルが大きく現れる角度45度周辺部を広く探索することで、効率よく動きベクトルを検出することができる。また、車速が速い場合には、相対的に動き量が小さく見える画面中央部と周辺部とに対し動きベクトルの探索範囲を制限することで処理時間の短縮とメモリアクセス帯域の削減、消費電力の低減等の効果が得られる。このように、動きベクトルの探索範囲を車速に応じて適応的に切り替えることで、処理時間の短縮とメモリアクセス帯域の削減、消費電力の低減等の効果が得られる。
<変形例>
以上、本開示の複数の実施の形態について具体的に説明したが、本開示の内容は上述した実施の形態に限定されるものではなく、本開示の技術的思想に基づく各種の変形が可能である。以下、変形例について説明する。
以上、本開示の複数の実施の形態について具体的に説明したが、本開示の内容は上述した実施の形態に限定されるものではなく、本開示の技術的思想に基づく各種の変形が可能である。以下、変形例について説明する。
本開示は、ドライブレコーダ以外の装置に対しても適用可能である。図9は、本開示を動体検知装置(動体検知装置10)に適用した場合の、動体検知装置10の構成例を示すブロック図である。なお、動体検知装置10において、ドライブレコーダ1が有する構成と同一又は同質の構成については、同一の参照符号を付している。
動体検知装置10は、魚眼レンズ2、撮像部3、車速センサ6、動き検出部11、物体抽出部12、動体判定部13及び動体検知結果出力部14を有している。魚眼レンズ2、撮像部3及び車速センサ6については、一実施の形態で説明しているため、重複した説明を省略する。
動き検出部11は、動きベクトルを検出する。動きベクトルの検出結果が物体抽出部12に供給される。物体抽出部12は、動きベクトル検出結果に基づいて、同じ方向に移動する領域を動体(例えば、歩行者、自転車等)として抽出する。動体判定部13は、物体抽出部12により抽出された物体(動体)の動きを判定する。動体検知結果出力部14は、動体の検知結果を表示等により出力するものである。
動体の検知結果が、例えば、移動体の運転者に対してフィードバックされ、危険の予測や警告として伝達される。動体の検知結果が、自動運転装置が周辺状況を認識するために用いられても良い。
動き検出部11が動きベクトルを検出する際に、一実施の形態と同様にして、本開示を適用することができる。即ち、動き検出部11に車速センサ6からの車速情報を入力することにより、動き検出部11が動きベクトルを検出する際の探索範囲を最適化することができる。これにより、一実施の形態と同様の効果を得ることができる。
その他の変形例について説明する。上述した一実施の形態では、等距離射影を例に挙げて説明してきたが、他の射影特性(例えば、等立体角射影方式、正射影方式等)を有する魚眼レンズに対しても本開示を適用することができる。また、画面中央の広い範囲で歪を減らし、周辺部を強く歪ませて、中央部の線形性と広い画角を両立させる特殊な射影特性を持つ光学系(例えば、超広角レンズ)に対しても、本開示を適用することができる。
上述した一実施の形態では、車速センサを使用して、移動体の移動速度を得る構成について説明したが、これに限定されるものではない。例えば、魚眼レンズを介して得られる画像を使用して移動体の移動速度を得るようにしても良い。画像から移動体の移動速度を得る方法としては公知の方法を適用することができる。一例を挙げれば、分割されているセンターラインの繰り返し周期に基づいて、移動体の移動速度を得ることができる。移動体の移動速度の検出精度をより向上させるため、車速センサ及び魚眼レンズを介して得られる画像の両方を使用して、移動体の移動速度を検出するようにしても良い。
本開示は、装置、方法、プログラム、システム等により実現することもできる。例えば、上述した実施の形態で説明した機能を行うプログラムをダウンロード可能とし、実施の形態で説明した機能を有しない装置が当該プログラムをダウンロードしてインストールすることにより、当該装置において実施の形態で説明した制御を行うことが可能となる。本開示は、このようなプログラムを配布するサーバにより実現することも可能である。また、各実施の形態、変形例で説明した事項は、適宜組み合わせることが可能である。
本開示は、以下の構成も採ることができる。
(1)
魚眼レンズの射影特性に応じて設定される動きベクトルの異なる探索範囲を、移動体の移動速度に応じて切り替える制御部を有する
画像処理装置。
(2)
前記魚眼レンズを介して得られる画像が、前記移動体と対象物とがなす角度に応じて複数の領域に分割され、前記領域毎に前記動きベクトルの探索範囲が設定される
(1)に記載の画像処理装置。
(3)
前記移動体と前記対象物とがなす角度に応じて、前記画像が、中央部、中間部及び周辺部に分割される
(2)に記載の画像処理装置。
(4)
前記動きベクトルの探索範囲として、第1の探索範囲と第2の探索範囲とが設定され、
前記第1の探索範囲として、前記周辺部における動きベクトルの探索範囲が、前記中央部及び前記中間部における動きベクトルの探索範囲に比べて小さくなるように設定され、
前記第2の探索範囲として、前記中央部及び前記周辺部における動きベクトルの探索範囲が、前記中間部における動きベクトルの探索範囲に比べて小さくなるように設定される
(3)に記載の画像処理装置。
(5)
前記制御部は、
前記移動体の移動速度が所定の閾値より小さい低速の場合には、前記動きベクトルの探索範囲として、前記第1の探索範囲として設定し、
前記移動体の移動速度が前記所定の閾値より高速の場合には、前記動きベクトルの探索範囲として、前記第2の探索範囲として設定する
(4)に記載の画像処理装置。
(6)
前記中央部は、前記移動体と前記対象物とがなす角度が0度における画像領域を含み、
前記中間部は、前記移動体と前記対象物とがなす角度が45度における画像領域を含み、
前記周辺部は、前記移動体と前記対象物とがなす角度が90度における画像領域を含む
(3)から(5)までの何れかに記載の画像処理装置。
(7)
前記画像が矩形画像である
(3)から(6)までの何れかに記載の画像処理装置。
(8)
前記移動体の移動速度が、車速センサ及び前記魚眼レンズを介して得られる画像の少なくとも一方を使用して検出される
(1)から(7)までの何れかに記載の画像処理装置。
(9)
魚眼レンズと、
撮像部と、
前記魚眼レンズ及び前記撮像部により得られる画像に基づいて、動きベクトルを検出するための探索範囲を設定する制御部と
を有し、
前記制御部は、魚眼レンズの射影特性に応じて設定される動きベクトルの異なる探索範囲を、移動体の移動速度に応じて切り替える
車載機器。
(10)
制御部が、魚眼レンズの射影特性に応じて設定される動きベクトルの異なる探索範囲を、移動体の移動速度に応じて切り替える
画像処理方法。
(11)
制御部が、魚眼レンズの射影特性に応じて設定される動きベクトルの異なる探索範囲を、移動体の移動速度に応じて切り替える
画像処理方法をコンピュータに実行させるプログラム。
(1)
魚眼レンズの射影特性に応じて設定される動きベクトルの異なる探索範囲を、移動体の移動速度に応じて切り替える制御部を有する
画像処理装置。
(2)
前記魚眼レンズを介して得られる画像が、前記移動体と対象物とがなす角度に応じて複数の領域に分割され、前記領域毎に前記動きベクトルの探索範囲が設定される
(1)に記載の画像処理装置。
(3)
前記移動体と前記対象物とがなす角度に応じて、前記画像が、中央部、中間部及び周辺部に分割される
(2)に記載の画像処理装置。
(4)
前記動きベクトルの探索範囲として、第1の探索範囲と第2の探索範囲とが設定され、
前記第1の探索範囲として、前記周辺部における動きベクトルの探索範囲が、前記中央部及び前記中間部における動きベクトルの探索範囲に比べて小さくなるように設定され、
前記第2の探索範囲として、前記中央部及び前記周辺部における動きベクトルの探索範囲が、前記中間部における動きベクトルの探索範囲に比べて小さくなるように設定される
(3)に記載の画像処理装置。
(5)
前記制御部は、
前記移動体の移動速度が所定の閾値より小さい低速の場合には、前記動きベクトルの探索範囲として、前記第1の探索範囲として設定し、
前記移動体の移動速度が前記所定の閾値より高速の場合には、前記動きベクトルの探索範囲として、前記第2の探索範囲として設定する
(4)に記載の画像処理装置。
(6)
前記中央部は、前記移動体と前記対象物とがなす角度が0度における画像領域を含み、
前記中間部は、前記移動体と前記対象物とがなす角度が45度における画像領域を含み、
前記周辺部は、前記移動体と前記対象物とがなす角度が90度における画像領域を含む
(3)から(5)までの何れかに記載の画像処理装置。
(7)
前記画像が矩形画像である
(3)から(6)までの何れかに記載の画像処理装置。
(8)
前記移動体の移動速度が、車速センサ及び前記魚眼レンズを介して得られる画像の少なくとも一方を使用して検出される
(1)から(7)までの何れかに記載の画像処理装置。
(9)
魚眼レンズと、
撮像部と、
前記魚眼レンズ及び前記撮像部により得られる画像に基づいて、動きベクトルを検出するための探索範囲を設定する制御部と
を有し、
前記制御部は、魚眼レンズの射影特性に応じて設定される動きベクトルの異なる探索範囲を、移動体の移動速度に応じて切り替える
車載機器。
(10)
制御部が、魚眼レンズの射影特性に応じて設定される動きベクトルの異なる探索範囲を、移動体の移動速度に応じて切り替える
画像処理方法。
(11)
制御部が、魚眼レンズの射影特性に応じて設定される動きベクトルの異なる探索範囲を、移動体の移動速度に応じて切り替える
画像処理方法をコンピュータに実行させるプログラム。
<応用例>
本開示に係る技術は、様々な製品へ応用することができる。例えば、本開示に係る技術は、自動車、電気自動車、ハイブリッド電気自動車、自動二輪車、自転車、パーソナルモビリティ、飛行機、ドローン、船舶、ロボット、建設機械、農業機械(トラクター)などのいずれかの種類の移動体に搭載される装置として実現されてもよい。
本開示に係る技術は、様々な製品へ応用することができる。例えば、本開示に係る技術は、自動車、電気自動車、ハイブリッド電気自動車、自動二輪車、自転車、パーソナルモビリティ、飛行機、ドローン、船舶、ロボット、建設機械、農業機械(トラクター)などのいずれかの種類の移動体に搭載される装置として実現されてもよい。
図10は、本開示に係る技術が適用され得る移動体制御システムの一例である車両制御システム7000の概略的な構成例を示すブロック図である。車両制御システム7000は、通信ネットワーク7010を介して接続された複数の電子制御ユニットを備える。図10に示した例では、車両制御システム7000は、駆動系制御ユニット7100、ボディ系制御ユニット7200、バッテリ制御ユニット7300、車外情報検出ユニット7400、車内情報検出ユニット7500、及び統合制御ユニット7600を備える。これらの複数の制御ユニットを接続する通信ネットワーク7010は、例えば、CAN(Controller Area Network)、LIN(Local Interconnect Network)、LAN(Local Area Network)又はFlexRay(登録商標)等の任意の規格に準拠した車載通信ネットワークであってよい。
各制御ユニットは、各種プログラムにしたがって演算処理を行うマイクロコンピュータと、マイクロコンピュータにより実行されるプログラム又は各種演算に用いられるパラメータ等を記憶する記憶部と、各種制御対象の装置を駆動する駆動回路とを備える。各制御ユニットは、通信ネットワーク7010を介して他の制御ユニットとの間で通信を行うためのネットワークI/Fを備えるとともに、車内外の装置又はセンサ等との間で、有線通信又は無線通信により通信を行うための通信I/Fを備える。図10では、統合制御ユニット7600の機能構成として、マイクロコンピュータ7610、汎用通信I/F7620、専用通信I/F7630、測位部7640、ビーコン受信部7650、車内機器I/F7660、音声画像出力部7670、車載ネットワークI/F7680及び記憶部7690が図示されている。他の制御ユニットも同様に、マイクロコンピュータ、通信I/F及び記憶部等を備える。
駆動系制御ユニット7100は、各種プログラムにしたがって車両の駆動系に関連する装置の動作を制御する。例えば、駆動系制御ユニット7100は、内燃機関又は駆動用モータ等の車両の駆動力を発生させるための駆動力発生装置、駆動力を車輪に伝達するための駆動力伝達機構、車両の舵角を調節するステアリング機構、及び、車両の制動力を発生させる制動装置等の制御装置として機能する。駆動系制御ユニット7100は、ABS(Antilock Brake System)又はESC(Electronic Stability Control)等の制御装置としての機能を有してもよい。
駆動系制御ユニット7100には、車両状態検出部7110が接続される。車両状態検出部7110には、例えば、車体の軸回転運動の角速度を検出するジャイロセンサ、車両の加速度を検出する加速度センサ、あるいは、アクセルペダルの操作量、ブレーキペダルの操作量、ステアリングホイールの操舵角、エンジン回転数又は車輪の回転速度等を検出するためのセンサのうちの少なくとも一つが含まれる。駆動系制御ユニット7100は、車両状態検出部7110から入力される信号を用いて演算処理を行い、内燃機関、駆動用モータ、電動パワーステアリング装置又はブレーキ装置等を制御する。
ボディ系制御ユニット7200は、各種プログラムにしたがって車体に装備された各種装置の動作を制御する。例えば、ボディ系制御ユニット7200は、キーレスエントリシステム、スマートキーシステム、パワーウィンドウ装置、あるいは、ヘッドランプ、バックランプ、ブレーキランプ、ウィンカー又はフォグランプ等の各種ランプの制御装置として機能する。この場合、ボディ系制御ユニット7200には、鍵を代替する携帯機から発信される電波又は各種スイッチの信号が入力され得る。ボディ系制御ユニット7200は、これらの電波又は信号の入力を受け付け、車両のドアロック装置、パワーウィンドウ装置、ランプ等を制御する。
バッテリ制御ユニット7300は、各種プログラムにしたがって駆動用モータの電力供給源である二次電池7310を制御する。例えば、バッテリ制御ユニット7300には、二次電池7310を備えたバッテリ装置から、バッテリ温度、バッテリ出力電圧又はバッテリの残存容量等の情報が入力される。バッテリ制御ユニット7300は、これらの信号を用いて演算処理を行い、二次電池7310の温度調節制御又はバッテリ装置に備えられた冷却装置等の制御を行う。
車外情報検出ユニット7400は、車両制御システム7000を搭載した車両の外部の情報を検出する。例えば、車外情報検出ユニット7400には、撮像部7410及び車外情報検出部7420のうちの少なくとも一方が接続される。撮像部7410には、ToF(Time Of Flight)カメラ、ステレオカメラ、単眼カメラ、赤外線カメラ及びその他のカメラのうちの少なくとも一つが含まれる。車外情報検出部7420には、例えば、現在の天候又は気象を検出するための環境センサ、あるいは、車両制御システム7000を搭載した車両の周囲の他の車両、障害物又は歩行者等を検出するための周囲情報検出センサのうちの少なくとも一つが含まれる。
環境センサは、例えば、雨天を検出する雨滴センサ、霧を検出する霧センサ、日照度合いを検出する日照センサ、及び降雪を検出する雪センサのうちの少なくとも一つであってよい。周囲情報検出センサは、超音波センサ、レーダ装置及びLIDAR(Light Detection and Ranging、Laser Imaging Detection and Ranging)装置のうちの少なくとも一つであってよい。これらの撮像部7410及び車外情報検出部7420は、それぞれ独立したセンサないし装置として備えられてもよいし、複数のセンサないし装置が統合された装置として備えられてもよい。
ここで、図11は、撮像部7410及び車外情報検出部7420の設置位置の例を示す。撮像部7910,7912,7914,7916,7918は、例えば、車両7900のフロントノーズ、サイドミラー、リアバンパ、バックドア及び車室内のフロントガラスの上部のうちの少なくとも一つの位置に設けられる。フロントノーズに備えられる撮像部7910及び車室内のフロントガラスの上部に備えられる撮像部7918は、主として車両7900の前方の画像を取得する。サイドミラーに備えられる撮像部7912,7914は、主として車両7900の側方の画像を取得する。リアバンパ又はバックドアに備えられる撮像部7916は、主として車両7900の後方の画像を取得する。車室内のフロントガラスの上部に備えられる撮像部7918は、主として先行車両又は、歩行者、障害物、信号機、交通標識又は車線等の検出に用いられる。
なお、図11には、それぞれの撮像部7910,7912,7914,7916の撮影範囲の一例が示されている。撮像範囲aは、フロントノーズに設けられた撮像部7910の撮像範囲を示し、撮像範囲b,cは、それぞれサイドミラーに設けられた撮像部7912,7914の撮像範囲を示し、撮像範囲dは、リアバンパ又はバックドアに設けられた撮像部7916の撮像範囲を示す。例えば、撮像部7910,7912,7914,7916で撮像された画像データが重ね合わせられることにより、車両7900を上方から見た俯瞰画像が得られる。
車両7900のフロント、リア、サイド、コーナ及び車室内のフロントガラスの上部に設けられる車外情報検出部7920,7922,7924,7926,7928,7930は、例えば超音波センサ又はレーダ装置であってよい。車両7900のフロントノーズ、リアバンパ、バックドア及び車室内のフロントガラスの上部に設けられる車外情報検出部7920,7926,7930は、例えばLIDAR装置であってよい。これらの車外情報検出部7920~7930は、主として先行車両、歩行者又は障害物等の検出に用いられる。
図10に戻って説明を続ける。車外情報検出ユニット7400は、撮像部7410に車外の画像を撮像させるとともに、撮像された画像データを受信する。また、車外情報検出ユニット7400は、接続されている車外情報検出部7420から検出情報を受信する。車外情報検出部7420が超音波センサ、レーダ装置又はLIDAR装置である場合には、車外情報検出ユニット7400は、超音波又は電磁波等を発信させるとともに、受信された反射波の情報を受信する。車外情報検出ユニット7400は、受信した情報に基づいて、人、車、障害物、標識又は路面上の文字等の物体検出処理又は距離検出処理を行ってもよい。車外情報検出ユニット7400は、受信した情報に基づいて、降雨、霧又は路面状況等を認識する環境認識処理を行ってもよい。車外情報検出ユニット7400は、受信した情報に基づいて、車外の物体までの距離を算出してもよい。
また、車外情報検出ユニット7400は、受信した画像データに基づいて、人、車、障害物、標識又は路面上の文字等を認識する画像認識処理又は距離検出処理を行ってもよい。車外情報検出ユニット7400は、受信した画像データに対して歪補正又は位置合わせ等の処理を行うとともに、異なる撮像部7410により撮像された画像データを合成して、俯瞰画像又はパノラマ画像を生成してもよい。車外情報検出ユニット7400は、異なる撮像部7410により撮像された画像データを用いて、視点変換処理を行ってもよい。
車内情報検出ユニット7500は、車内の情報を検出する。車内情報検出ユニット7500には、例えば、運転者の状態を検出する運転者状態検出部7510が接続される。運転者状態検出部7510は、運転者を撮像するカメラ、運転者の生体情報を検出する生体センサ又は車室内の音声を集音するマイク等を含んでもよい。生体センサは、例えば、座面又はステアリングホイール等に設けられ、座席に座った搭乗者又はステアリングホイールを握る運転者の生体情報を検出する。車内情報検出ユニット7500は、運転者状態検出部7510から入力される検出情報に基づいて、運転者の疲労度合い又は集中度合いを算出してもよいし、運転者が居眠りをしていないかを判別してもよい。車内情報検出ユニット7500は、集音された音声信号に対してノイズキャンセリング処理等の処理を行ってもよい。
統合制御ユニット7600は、各種プログラムにしたがって車両制御システム7000内の動作全般を制御する。統合制御ユニット7600には、入力部7800が接続されている。入力部7800は、例えば、タッチパネル、ボタン、マイクロフォン、スイッチ又はレバー等、搭乗者によって入力操作され得る装置によって実現される。統合制御ユニット7600には、マイクロフォンにより入力される音声を音声認識することにより得たデータが入力されてもよい。入力部7800は、例えば、赤外線又はその他の電波を利用したリモートコントロール装置であってもよいし、車両制御システム7000の操作に対応した携帯電話又はPDA(Personal Digital Assistant)等の外部接続機器であってもよい。入力部7800は、例えばカメラであってもよく、その場合搭乗者はジェスチャにより情報を入力することができる。あるいは、搭乗者が装着したウェアラブル装置の動きを検出することで得られたデータが入力されてもよい。さらに、入力部7800は、例えば、上記の入力部7800を用いて搭乗者等により入力された情報に基づいて入力信号を生成し、統合制御ユニット7600に出力する入力制御回路などを含んでもよい。搭乗者等は、この入力部7800を操作することにより、車両制御システム7000に対して各種のデータを入力したり処理動作を指示したりする。
記憶部7690は、マイクロコンピュータにより実行される各種プログラムを記憶するROM(Read Only Memory)、及び各種パラメータ、演算結果又はセンサ値等を記憶するRAM(Random Access Memory)を含んでいてもよい。また、記憶部7690は、HDD(Hard Disc Drive)等の磁気記憶デバイス、半導体記憶デバイス、光記憶デバイス又は光磁気記憶デバイス等によって実現してもよい。
汎用通信I/F7620は、外部環境7750に存在する様々な機器との間の通信を仲介する汎用的な通信I/Fである。汎用通信I/F7620は、GSM(登録商標)(Global System of Mobile communications)、WiMAX(登録商標)、LTE(登録商標)(Long Term Evolution)若しくはLTE-A(LTE-Advanced)などのセルラー通信プロトコル、又は無線LAN(Wi-Fi(登録商標)ともいう)、Bluetooth(登録商標)などのその他の無線通信プロトコルを実装してよい。汎用通信I/F7620は、例えば、基地局又はアクセスポイントを介して、外部ネットワーク(例えば、インターネット、クラウドネットワーク又は事業者固有のネットワーク)上に存在する機器(例えば、アプリケーションサーバ又は制御サーバ)へ接続してもよい。また、汎用通信I/F7620は、例えばP2P(Peer To Peer)技術を用いて、車両の近傍に存在する端末(例えば、運転者、歩行者若しくは店舗の端末、又はMTC(Machine Type Communication)端末)と接続してもよい。
専用通信I/F7630は、車両における使用を目的として策定された通信プロトコルをサポートする通信I/Fである。専用通信I/F7630は、例えば、下位レイヤのIEEE802.11pと上位レイヤのIEEE1609との組合せであるWAVE(Wireless Access in Vehicle Environment)、DSRC(Dedicated Short Range Communications)、又はセルラー通信プロトコルといった標準プロトコルを実装してよい。専用通信I/F7630は、典型的には、車車間(Vehicle to Vehicle)通信、路車間(Vehicle to Infrastructure)通信、車両と家との間(Vehicle to Home)の通信及び歩車間(Vehicle to Pedestrian)通信のうちの1つ以上を含む概念であるV2X通信を遂行する。
測位部7640は、例えば、GNSS(Global Navigation Satellite System)衛星からのGNSS信号(例えば、GPS(Global Positioning System)衛星からのGPS信号)を受信して測位を実行し、車両の緯度、経度及び高度を含む位置情報を生成する。なお、測位部7640は、無線アクセスポイントとの信号の交換により現在位置を特定してもよく、又は測位機能を有する携帯電話、PHS若しくはスマートフォンといった端末から位置情報を取得してもよい。
ビーコン受信部7650は、例えば、道路上に設置された無線局等から発信される電波あるいは電磁波を受信し、現在位置、渋滞、通行止め又は所要時間等の情報を取得する。なお、ビーコン受信部7650の機能は、上述した専用通信I/F7630に含まれてもよい。
車内機器I/F7660は、マイクロコンピュータ7610と車内に存在する様々な車内機器7760との間の接続を仲介する通信インタフェースである。車内機器I/F7660は、無線LAN、Bluetooth(登録商標)、NFC(Near Field Communication)又はWUSB(Wireless USB)といった無線通信プロトコルを用いて無線接続を確立してもよい。また、車内機器I/F7660は、図示しない接続端子(及び、必要であればケーブル)を介して、USB(Universal Serial Bus)、HDMI(登録商標)(High-Definition Multimedia Interface、又はMHL(Mobile High-definition Link)等の有線接続を確立してもよい。車内機器7760は、例えば、搭乗者が有するモバイル機器若しくはウェアラブル機器、又は車両に搬入され若しくは取り付けられる情報機器のうちの少なくとも1つを含んでいてもよい。また、車内機器7760は、任意の目的地までの経路探索を行うナビゲーション装置を含んでいてもよい。車内機器I/F7660は、これらの車内機器7760との間で、制御信号又はデータ信号を交換する。
車載ネットワークI/F7680は、マイクロコンピュータ7610と通信ネットワーク7010との間の通信を仲介するインタフェースである。車載ネットワークI/F7680は、通信ネットワーク7010によりサポートされる所定のプロトコルに則して、信号等を送受信する。
統合制御ユニット7600のマイクロコンピュータ7610は、汎用通信I/F7620、専用通信I/F7630、測位部7640、ビーコン受信部7650、車内機器I/F7660及び車載ネットワークI/F7680のうちの少なくとも一つを介して取得される情報に基づき、各種プログラムにしたがって、車両制御システム7000を制御する。例えば、マイクロコンピュータ7610は、取得される車内外の情報に基づいて、駆動力発生装置、ステアリング機構又は制動装置の制御目標値を演算し、駆動系制御ユニット7100に対して制御指令を出力してもよい。例えば、マイクロコンピュータ7610は、車両の衝突回避あるいは衝撃緩和、車間距離に基づく追従走行、車速維持走行、車両の衝突警告、又は車両のレーン逸脱警告等を含むADAS(Advanced Driver Assistance System)の機能実現を目的とした協調制御を行ってもよい。また、マイクロコンピュータ7610は、取得される車両の周囲の情報に基づいて駆動力発生装置、ステアリング機構又は制動装置等を制御することにより、運転者の操作に拠らずに自律的に走行する自動運転等を目的とした協調制御を行ってもよい。
マイクロコンピュータ7610は、汎用通信I/F7620、専用通信I/F7630、測位部7640、ビーコン受信部7650、車内機器I/F7660及び車載ネットワークI/F7680のうちの少なくとも一つを介して取得される情報に基づき、車両と周辺の構造物や人物等の物体との間の3次元距離情報を生成し、車両の現在位置の周辺情報を含むローカル地図情報を作成してもよい。また、マイクロコンピュータ7610は、取得される情報に基づき、車両の衝突、歩行者等の近接又は通行止めの道路への進入等の危険を予測し、警告用信号を生成してもよい。警告用信号は、例えば、警告音を発生させたり、警告ランプを点灯させたりするための信号であってよい。
音声画像出力部7670は、車両の搭乗者又は車外に対して、視覚的又は聴覚的に情報を通知することが可能な出力装置へ音声及び画像のうちの少なくとも一方の出力信号を送信する。図10の例では、出力装置として、オーディオスピーカ7710、表示部7720及びインストルメントパネル7730が例示されている。表示部7720は、例えば、オンボードディスプレイ及びヘッドアップディスプレイの少なくとも一つを含んでいてもよい。表示部7720は、AR(Augmented Reality)表示機能を有していてもよい。出力装置は、これらの装置以外の、ヘッドホン、搭乗者が装着する眼鏡型ディスプレイ等のウェアラブルデバイス、プロジェクタ又はランプ等の他の装置であってもよい。出力装置が表示装置の場合、表示装置は、マイクロコンピュータ7610が行った各種処理により得られた結果又は他の制御ユニットから受信された情報を、テキスト、イメージ、表、グラフ等、様々な形式で視覚的に表示する。また、出力装置が音声出力装置の場合、音声出力装置は、再生された音声データ又は音響データ等からなるオーディオ信号をアナログ信号に変換して聴覚的に出力する。
なお、図10に示した例において、通信ネットワーク7010を介して接続された少なくとも二つの制御ユニットが一つの制御ユニットとして一体化されてもよい。あるいは、個々の制御ユニットが、複数の制御ユニットにより構成されてもよい。さらに、車両制御システム7000が、図示されていない別の制御ユニットを備えてもよい。また、上記の説明において、いずれかの制御ユニットが担う機能の一部又は全部を、他の制御ユニットに持たせてもよい。つまり、通信ネットワーク7010を介して情報の送受信がされるようになっていれば、所定の演算処理が、いずれかの制御ユニットで行われるようになってもよい。同様に、いずれかの制御ユニットに接続されているセンサ又は装置が、他の制御ユニットに接続されるとともに、複数の制御ユニットが、通信ネットワーク7010を介して相互に検出情報を送受信してもよい。
なお、図3を用いて説明した本実施の形態に係るドライブレコーダ1の各機能を実現するためのコンピュータプログラムを、いずれかの制御ユニット等に実装することができる。また、このようなコンピュータプログラムが格納された、コンピュータで読み取り可能な記録媒体を提供することもできる。記録媒体は、例えば、磁気ディスク、光ディスク、光磁気ディスク、フラッシュメモリ等である。また、上記のコンピュータプログラムは、記録媒体を用いずに、例えばネットワークを介して配信されてもよい。
以上説明した車両制御システム7000において、図3を用いて説明した本実施の形態に係るドライブレコーダ1は、図10に示した応用例の車外情報検出ユニット7400に適用することができる。
また、図3を用いて説明したドライブレコーダ1の少なくとも一部の構成要素は、図10に示した統合制御ユニット7600のためのモジュール(例えば、一つのダイで構成される集積回路モジュール)において実現されてもよい。あるいは、図3を用いて説明したドライブレコーダ1が、図10に示した車両制御システム7000の複数の制御ユニットによって実現されてもよい。
1・・・ドライブレコーダ、2・・・魚眼レンズ、4・・・制御部、4c・・・探索範囲設定部、4d・・・画像符号化部、6・・・車速センサ、410・・・動きベクトル検出部
Claims (11)
- 魚眼レンズの射影特性に応じて設定される動きベクトルの異なる探索範囲を、移動体の移動速度に応じて切り替える制御部を有する
画像処理装置。 - 前記魚眼レンズを介して得られる画像が、前記移動体と対象物とがなす角度に応じて複数の領域に分割され、前記領域毎に前記動きベクトルの探索範囲が設定される
請求項1に記載の画像処理装置。 - 前記移動体と前記対象物とがなす角度に応じて、前記画像が、中央部、中間部及び周辺部に分割される
請求項2に記載の画像処理装置。 - 前記動きベクトルの探索範囲として、第1の探索範囲と第2の探索範囲とが設定され、
前記第1の探索範囲として、前記周辺部における動きベクトルの探索範囲が、前記中央部及び前記中間部における動きベクトルの探索範囲に比べて小さくなるように設定され、
前記第2の探索範囲として、前記中央部及び前記周辺部における動きベクトルの探索範囲が、前記中間部における動きベクトルの探索範囲に比べて小さくなるように設定される
請求項3に記載の画像処理装置。 - 前記制御部は、
前記移動体の移動速度が所定の閾値より小さい低速の場合には、前記動きベクトルの探索範囲として、前記第1の探索範囲として設定し、
前記移動体の移動速度が前記所定の閾値より高速の場合には、前記動きベクトルの探索範囲として、前記第2の探索範囲として設定する
請求項4に記載の画像処理装置。 - 前記中央部は、前記移動体と前記対象物とがなす角度が0度における画像領域を含み、
前記中間部は、前記移動体と前記対象物とがなす角度が45度における画像領域を含み、
前記周辺部は、前記移動体と前記対象物とがなす角度が90度における画像領域を含む
請求項3に記載の画像処理装置。 - 前記画像が矩形画像である
請求項3に記載の画像処理装置。 - 前記移動体の移動速度が、車速センサ及び前記魚眼レンズを介して得られる画像の少なくとも一方を使用して検出される
請求項1に記載の画像処理装置。 - 魚眼レンズと、
撮像部と、
前記魚眼レンズ及び前記撮像部により得られる画像に基づいて、動きベクトルを検出するための探索範囲を設定する制御部と
を有し、
前記制御部は、魚眼レンズの射影特性に応じて設定される動きベクトルの異なる探索範囲を、移動体の移動速度に応じて切り替える
車載機器。 - 制御部が、魚眼レンズの射影特性に応じて設定される動きベクトルの異なる探索範囲を、移動体の移動速度に応じて切り替える
画像処理方法。 - 制御部が、魚眼レンズの射影特性に応じて設定される動きベクトルの異なる探索範囲を、移動体の移動速度に応じて切り替える
画像処理方法をコンピュータに実行させるプログラム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US17/049,819 US20210248756A1 (en) | 2018-05-10 | 2019-02-14 | Image processing apparatus, vehicle-mounted apparatus, image processing method, and program |
| JP2020518144A JPWO2019215979A1 (ja) | 2018-05-10 | 2019-02-14 | 画像処理装置、車載装置、画像処理方法及びプログラム |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018091460 | 2018-05-10 | ||
| JP2018-091460 | 2018-05-10 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2019215979A1 true WO2019215979A1 (ja) | 2019-11-14 |
Family
ID=68467413
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2019/005225 WO2019215979A1 (ja) | 2018-05-10 | 2019-02-14 | 画像処理装置、車載装置、画像処理方法及びプログラム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20210248756A1 (ja) |
| JP (1) | JPWO2019215979A1 (ja) |
| WO (1) | WO2019215979A1 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7192582B2 (ja) * | 2019-03-11 | 2022-12-20 | オムロン株式会社 | 物体追跡装置および物体追跡方法 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001061151A (ja) * | 1999-08-19 | 2001-03-06 | Denso Corp | 動きベクトル検出方法及び記録媒体 |
| JP2006268865A (ja) * | 2006-04-07 | 2006-10-05 | Pioneer Electronic Corp | ナビゲーション装置 |
| JP2012160886A (ja) * | 2011-01-31 | 2012-08-23 | Canon Inc | 撮像装置、その制御方法及びプログラム |
| JP2017142760A (ja) * | 2016-02-12 | 2017-08-17 | 日立オートモティブシステムズ株式会社 | 移動体の周囲環境認識装置 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4603421B2 (ja) * | 2005-05-27 | 2010-12-22 | 本田技研工業株式会社 | 車両、画像処理システム、画像処理方法、及び画像処理プログラム |
| JPWO2011013813A1 (ja) * | 2009-07-30 | 2013-01-10 | クラリオン株式会社 | 車載装置および画像処理プログラム |
| JP5792091B2 (ja) * | 2012-02-16 | 2015-10-07 | 富士通テン株式会社 | 物体検出装置及び物体検出方法 |
| JP6724288B2 (ja) * | 2014-11-07 | 2020-07-15 | 株式会社ニコン | 交換レンズ、カメラ本体およびカメラ |
| US20170024622A1 (en) * | 2015-07-24 | 2017-01-26 | Honda Motor Co., Ltd. | Surrounding environment recognition device |
| JP6723079B2 (ja) * | 2016-06-08 | 2020-07-15 | 日立オートモティブシステムズ株式会社 | 物体距離検出装置 |
| JP7108421B2 (ja) * | 2018-02-15 | 2022-07-28 | キヤノン株式会社 | 撮像装置及び撮像システム |
-
2019
- 2019-02-14 WO PCT/JP2019/005225 patent/WO2019215979A1/ja active Application Filing
- 2019-02-14 JP JP2020518144A patent/JPWO2019215979A1/ja not_active Abandoned
- 2019-02-14 US US17/049,819 patent/US20210248756A1/en not_active Abandoned
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001061151A (ja) * | 1999-08-19 | 2001-03-06 | Denso Corp | 動きベクトル検出方法及び記録媒体 |
| JP2006268865A (ja) * | 2006-04-07 | 2006-10-05 | Pioneer Electronic Corp | ナビゲーション装置 |
| JP2012160886A (ja) * | 2011-01-31 | 2012-08-23 | Canon Inc | 撮像装置、その制御方法及びプログラム |
| JP2017142760A (ja) * | 2016-02-12 | 2017-08-17 | 日立オートモティブシステムズ株式会社 | 移動体の周囲環境認識装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20210248756A1 (en) | 2021-08-12 |
| JPWO2019215979A1 (ja) | 2021-05-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10957029B2 (en) | Image processing device and image processing method | |
| JP6988815B2 (ja) | 画像処理装置および画像処理方法 | |
| US10880498B2 (en) | Image processing apparatus and image processing method to improve quality of a low-quality image | |
| JP6977722B2 (ja) | 撮像装置、および画像処理システム | |
| WO2018079260A1 (ja) | 画像処理装置および画像処理方法 | |
| JP2018029280A (ja) | 撮像装置と撮像方法 | |
| JPWO2018070266A1 (ja) | 画像処理装置および画像処理方法 | |
| WO2018016150A1 (ja) | 画像処理装置と画像処理方法 | |
| JPWO2018016151A1 (ja) | 画像処理装置と画像処理方法 | |
| US11585898B2 (en) | Signal processing device, signal processing method, and program | |
| WO2019116746A1 (ja) | 画像処理装置、画像処理方法及び撮像装置 | |
| WO2019035391A1 (en) | SERVER, METHOD, NON-TRANSIENT COMPUTER-READABLE MEDIUM, AND SYSTEM | |
| WO2020085101A1 (ja) | 画像処理装置と画像処理方法およびプログラム | |
| WO2019215979A1 (ja) | 画像処理装置、車載装置、画像処理方法及びプログラム | |
| WO2020195965A1 (ja) | 情報処理装置、情報処理方法及びプログラム | |
| WO2021125076A1 (ja) | 情報処理装置、情報処理方法、プログラム、撮像装置及び撮像システム | |
| JP7160085B2 (ja) | 画像処理装置、画像処理方法及びプログラム | |
| WO2020195969A1 (ja) | 情報処理装置、情報処理方法及びプログラム | |
| US20230412923A1 (en) | Signal processing device, imaging device, and signal processing method | |
| JP7173056B2 (ja) | 認識装置と認識方法およびプログラム | |
| WO2020255589A1 (ja) | 情報処理装置、情報処理方法及びプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 19800764 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2020518144 Country of ref document: JP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 19800764 Country of ref document: EP Kind code of ref document: A1 |