JP2018017579A - 材料試験機 - Google Patents
材料試験機 Download PDFInfo
- Publication number
- JP2018017579A JP2018017579A JP2016147149A JP2016147149A JP2018017579A JP 2018017579 A JP2018017579 A JP 2018017579A JP 2016147149 A JP2016147149 A JP 2016147149A JP 2016147149 A JP2016147149 A JP 2016147149A JP 2018017579 A JP2018017579 A JP 2018017579A
- Authority
- JP
- Japan
- Prior art keywords
- load cell
- servo amplifier
- crosshead
- test
- signal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images


Landscapes
- Investigating Strength Of Materials By Application Of Mechanical Stress (AREA)
Abstract
Description
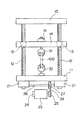
12 ねじ棹
13 ナット
14 クロスヘッド
15 クロスヨーク
16 ロードセル
21 ギアボックス
23 サーボモータ
24 ロータリエンコーダ
31 上つかみ具
32 下つかみ具
52 デジタルフィルタ
55 デジタルフィルタ
56 過負荷検出部
57 位置制御部
58 試験制御部
59 サーボアンプ
100 試験片
Claims (1)
- 試験片を把持または押圧する治具を備えたクロスヘッドと、
前記試験片に付与される試験力を検出するロードセルと、
前記クロスヘッドに配設されたナットと螺合するねじ棹と、
前記ねじ棹を回転駆動するサーボモータと、
前記サーボモータを駆動制御するサーボアンプと、
を備えた材料試験機において、
前記サーボアンプの駆動により前記クロスヘッドが第1の方向に移動している状態で前記ロードセルの検出値が設定値を超えたことを検知したときに、前記サーボアンプにおける偏差カウンタをクリアすることにより前記クロスヘッドを前記第1の方向と逆の方向である第2の方向に移動させて前記検知時の位置まで復帰させるとともに、前記クロスヘッドを前記第2の方向に予め設定された距離だけさらに移動させることを特徴とする材料試験機。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016147149A JP6658383B2 (ja) | 2016-07-27 | 2016-07-27 | 材料試験機 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016147149A JP6658383B2 (ja) | 2016-07-27 | 2016-07-27 | 材料試験機 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018017579A true JP2018017579A (ja) | 2018-02-01 |
| JP6658383B2 JP6658383B2 (ja) | 2020-03-04 |
Family
ID=61075754
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016147149A Active JP6658383B2 (ja) | 2016-07-27 | 2016-07-27 | 材料試験機 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6658383B2 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109060523A (zh) * | 2018-06-28 | 2018-12-21 | 四川升拓检测技术股份有限公司 | 一种用于反拉法的钢绞线夹片多点独立位移检测装置 |
| WO2020198729A1 (en) * | 2019-03-28 | 2020-10-01 | Illinois Tool Works Inc. | Collision mitigation apparatus and material testing systems having collision mitigation apparatus |
| US11293743B2 (en) | 2018-12-20 | 2022-04-05 | Ametek, Inc. | Texture analyzer |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6258739U (ja) * | 1985-09-30 | 1987-04-11 | ||
| JPS6337233A (ja) * | 1986-07-31 | 1988-02-17 | Shimadzu Corp | 材料試験装置 |
| JPS6425032A (en) * | 1987-07-21 | 1989-01-27 | Shimadzu Corp | Material testing machine |
| US4802367A (en) * | 1986-12-09 | 1989-02-07 | Mts Systems Corporation | Tensile test controller |
| JPH1123434A (ja) * | 1997-07-03 | 1999-01-29 | Shimadzu Corp | 材料試験機 |
| JPH1172423A (ja) * | 1997-08-29 | 1999-03-16 | Shimadzu Corp | 材料試験機の負荷制御方法 |
| JP2000214059A (ja) * | 1999-01-27 | 2000-08-04 | Saginomiya Seisakusho Inc | 材料試験機制御方法 |
| JP2009002900A (ja) * | 2007-06-25 | 2009-01-08 | Shimadzu Corp | 試験装置および試験方法 |
| JP2013250219A (ja) * | 2012-06-04 | 2013-12-12 | Shimadzu Corp | 材料試験機 |
-
2016
- 2016-07-27 JP JP2016147149A patent/JP6658383B2/ja active Active
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6258739U (ja) * | 1985-09-30 | 1987-04-11 | ||
| JPS6337233A (ja) * | 1986-07-31 | 1988-02-17 | Shimadzu Corp | 材料試験装置 |
| US4802367A (en) * | 1986-12-09 | 1989-02-07 | Mts Systems Corporation | Tensile test controller |
| JPS6425032A (en) * | 1987-07-21 | 1989-01-27 | Shimadzu Corp | Material testing machine |
| JPH1123434A (ja) * | 1997-07-03 | 1999-01-29 | Shimadzu Corp | 材料試験機 |
| JPH1172423A (ja) * | 1997-08-29 | 1999-03-16 | Shimadzu Corp | 材料試験機の負荷制御方法 |
| JP2000214059A (ja) * | 1999-01-27 | 2000-08-04 | Saginomiya Seisakusho Inc | 材料試験機制御方法 |
| JP2009002900A (ja) * | 2007-06-25 | 2009-01-08 | Shimadzu Corp | 試験装置および試験方法 |
| JP2013250219A (ja) * | 2012-06-04 | 2013-12-12 | Shimadzu Corp | 材料試験機 |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109060523A (zh) * | 2018-06-28 | 2018-12-21 | 四川升拓检测技术股份有限公司 | 一种用于反拉法的钢绞线夹片多点独立位移检测装置 |
| US11293743B2 (en) | 2018-12-20 | 2022-04-05 | Ametek, Inc. | Texture analyzer |
| WO2020198729A1 (en) * | 2019-03-28 | 2020-10-01 | Illinois Tool Works Inc. | Collision mitigation apparatus and material testing systems having collision mitigation apparatus |
| CN114026404A (zh) * | 2019-03-28 | 2022-02-08 | 伊利诺斯工具制品有限公司 | 碰撞缓解装置和具有碰撞缓解装置的材料试验系统 |
| US11592375B2 (en) | 2019-03-28 | 2023-02-28 | Illinois Tool Works Inc. | Collision mitigation apparatus material testing systems having collision mitigation apparatus |
| JP7528113B2 (ja) | 2019-03-28 | 2024-08-05 | イリノイ トゥール ワークス インコーポレイティド | 衝突軽減装置、及び衝突軽減装置を有する材料試験システム |
| CN114026404B (zh) * | 2019-03-28 | 2024-08-09 | 伊利诺斯工具制品有限公司 | 碰撞缓解装置和具有碰撞缓解装置的材料测试系统 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6658383B2 (ja) | 2020-03-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5520979B2 (ja) | 衝突監視装置を備えた工作機械 | |
| JP2018017579A (ja) | 材料試験機 | |
| WO2014136835A1 (ja) | 工作機械の異常診断装置及び異常診断方法 | |
| CN107816929B (zh) | 圆度测量机 | |
| KR102261446B1 (ko) | 사출성형기 | |
| JP5382543B2 (ja) | 電動シリンダの制御方法及び電動シリンダの制御システム | |
| EP3244276B1 (en) | Machine tool collision detecting apparatus equipped with collision stress releasing device | |
| JP2016159367A (ja) | ロボットの動作モードを自動的に切替えるロボット制御装置 | |
| US10391730B2 (en) | Pulse motor system, pulse motor system controller, and a non-transitory computer-readable recording medium recording a program | |
| US10105848B2 (en) | Machine that stops movement of member on drive axis due to abnormality in brake | |
| JP5561459B2 (ja) | プレス機械装置およびそのモータ制御装置 | |
| CN111897289B (zh) | 电机驱动机构的力矩信息处理方法、装置、设备与介质 | |
| CN105436245B (zh) | 一种数控转塔冲床 | |
| JP3820887B2 (ja) | Acサーボモータの過負荷保護装置 | |
| CN110560808B (zh) | 碰撞保护方法 | |
| JP2015155104A (ja) | プレス機械及びプレス機械の制御方法 | |
| JP4188626B2 (ja) | プレス機械の加工制御システム | |
| CN102350486A (zh) | 利用交流伺服电机驱动三工位活塞环造型机定位的方法 | |
| CN113467373A (zh) | 数值控制装置 | |
| JP3787481B2 (ja) | 工作機械における切削工具の負荷検出方法および装置 | |
| JP6065372B2 (ja) | モーター制御装置、ロボットハンド及びロボット | |
| US11117235B2 (en) | Machine tool | |
| CN202556134U (zh) | 巡检机构 | |
| JP7407030B2 (ja) | モータ制御装置及び監視方法 | |
| US9884464B2 (en) | Method for setting up and operating a press |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20181003 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190829 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20191001 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20191129 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191220 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200107 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200120 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6658383 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |