JP2017514568A - 温度制御付き外科手術装置 - Google Patents
温度制御付き外科手術装置 Download PDFInfo
- Publication number
- JP2017514568A JP2017514568A JP2016562213A JP2016562213A JP2017514568A JP 2017514568 A JP2017514568 A JP 2017514568A JP 2016562213 A JP2016562213 A JP 2016562213A JP 2016562213 A JP2016562213 A JP 2016562213A JP 2017514568 A JP2017514568 A JP 2017514568A
- Authority
- JP
- Japan
- Prior art keywords
- distal end
- probe
- probe distal
- end portion
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 239000000523 sample Substances 0.000 claims abstract description 315
- 230000017525 heat dissipation Effects 0.000 claims abstract description 20
- 238000012546 transfer Methods 0.000 claims abstract description 8
- 239000012636 effector Substances 0.000 claims abstract description 5
- 230000005540 biological transmission Effects 0.000 claims description 52
- 239000003507 refrigerant Substances 0.000 claims description 37
- 239000000463 material Substances 0.000 claims description 19
- 239000011162 core material Substances 0.000 claims description 18
- 239000012530 fluid Substances 0.000 claims description 16
- 239000010935 stainless steel Substances 0.000 claims description 10
- 229910001220 stainless steel Inorganic materials 0.000 claims description 10
- OKTJSMMVPCPJKN-UHFFFAOYSA-N Carbon Chemical compound [C] OKTJSMMVPCPJKN-UHFFFAOYSA-N 0.000 claims description 3
- 229910002804 graphite Inorganic materials 0.000 claims description 3
- 239000010439 graphite Substances 0.000 claims description 3
- 239000012071 phase Substances 0.000 claims 4
- 239000012808 vapor phase Substances 0.000 claims 4
- 230000005855 radiation Effects 0.000 claims 2
- 238000002560 therapeutic procedure Methods 0.000 description 72
- 229910052751 metal Inorganic materials 0.000 description 53
- 239000002184 metal Substances 0.000 description 53
- 230000004048 modification Effects 0.000 description 41
- 238000012986 modification Methods 0.000 description 41
- 230000002093 peripheral effect Effects 0.000 description 29
- 238000003780 insertion Methods 0.000 description 10
- 230000037431 insertion Effects 0.000 description 10
- 238000005452 bending Methods 0.000 description 9
- 230000008878 coupling Effects 0.000 description 8
- 238000010168 coupling process Methods 0.000 description 8
- 238000005859 coupling reaction Methods 0.000 description 8
- 230000000694 effects Effects 0.000 description 8
- 230000015271 coagulation Effects 0.000 description 7
- 238000005345 coagulation Methods 0.000 description 7
- 239000011347 resin Substances 0.000 description 7
- 229920005989 resin Polymers 0.000 description 7
- 230000001225 therapeutic effect Effects 0.000 description 7
- 239000011810 insulating material Substances 0.000 description 6
- 238000000034 method Methods 0.000 description 6
- 230000008569 process Effects 0.000 description 6
- 238000009210 therapy by ultrasound Methods 0.000 description 5
- 229910001069 Ti alloy Inorganic materials 0.000 description 4
- 230000007246 mechanism Effects 0.000 description 4
- 230000002265 prevention Effects 0.000 description 4
- 230000009471 action Effects 0.000 description 3
- 230000001154 acute effect Effects 0.000 description 3
- 239000012212 insulator Substances 0.000 description 3
- 241000192308 Agrostis hyemalis Species 0.000 description 2
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 2
- 238000004891 communication Methods 0.000 description 2
- 239000012141 concentrate Substances 0.000 description 2
- 239000004020 conductor Substances 0.000 description 2
- 229910052802 copper Inorganic materials 0.000 description 2
- 239000010949 copper Substances 0.000 description 2
- 230000007423 decrease Effects 0.000 description 2
- 238000006073 displacement reaction Methods 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 239000007769 metal material Substances 0.000 description 2
- -1 polytetrafluoroethylene Polymers 0.000 description 2
- 229920001343 polytetrafluoroethylene Polymers 0.000 description 2
- 239000004810 polytetrafluoroethylene Substances 0.000 description 2
- 238000007789 sealing Methods 0.000 description 2
- 229910052709 silver Inorganic materials 0.000 description 2
- 239000004332 silver Substances 0.000 description 2
- LFQSCWFLJHTTHZ-UHFFFAOYSA-N Ethanol Chemical compound CCO LFQSCWFLJHTTHZ-UHFFFAOYSA-N 0.000 description 1
- BQCADISMDOOEFD-UHFFFAOYSA-N Silver Chemical compound [Ag] BQCADISMDOOEFD-UHFFFAOYSA-N 0.000 description 1
- 230000002730 additional effect Effects 0.000 description 1
- 210000004204 blood vessel Anatomy 0.000 description 1
- 229910052799 carbon Inorganic materials 0.000 description 1
- 229910010293 ceramic material Inorganic materials 0.000 description 1
- 238000001816 cooling Methods 0.000 description 1
- 239000013013 elastic material Substances 0.000 description 1
- 230000005611 electricity Effects 0.000 description 1
- 230000008020 evaporation Effects 0.000 description 1
- 238000001704 evaporation Methods 0.000 description 1
- PCHJSUWPFVWCPO-UHFFFAOYSA-N gold Chemical compound [Au] PCHJSUWPFVWCPO-UHFFFAOYSA-N 0.000 description 1
- 229910052737 gold Inorganic materials 0.000 description 1
- 239000010931 gold Substances 0.000 description 1
- 239000007788 liquid Substances 0.000 description 1
- 239000000843 powder Substances 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 238000007711 solidification Methods 0.000 description 1
- 230000008023 solidification Effects 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
- 238000003466 welding Methods 0.000 description 1
Images


































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B18/1442—Probes having pivoting end effectors, e.g. forceps
- A61B18/1445—Probes having pivoting end effectors, e.g. forceps at the distal end of a shaft, e.g. forceps or scissors at the end of a rigid rod
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/28—Surgical forceps
- A61B17/2812—Surgical forceps with a single pivotal connection
- A61B17/282—Jaws
- A61B2017/2825—Inserts of different material in jaws
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/32—Surgical cutting instruments
- A61B17/320068—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic
- A61B2017/320069—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic for ablating tissue
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/32—Surgical cutting instruments
- A61B17/320068—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic
- A61B2017/320071—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic with articulating means for working tip
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/32—Surgical cutting instruments
- A61B17/320068—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic
- A61B2017/320082—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic for incising tissue
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/32—Surgical cutting instruments
- A61B17/320068—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic
- A61B2017/320089—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic node location
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/32—Surgical cutting instruments
- A61B17/320068—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic
- A61B17/320092—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic with additional movable means for clamping or cutting tissue, e.g. with a pivoting jaw
- A61B2017/320094—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic with additional movable means for clamping or cutting tissue, e.g. with a pivoting jaw additional movable means performing clamping operation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/32—Surgical cutting instruments
- A61B17/320068—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic
- A61B17/320092—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic with additional movable means for clamping or cutting tissue, e.g. with a pivoting jaw
- A61B2017/320095—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic with additional movable means for clamping or cutting tissue, e.g. with a pivoting jaw with sealing or cauterizing means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00005—Cooling or heating of the probe or tissue immediately surrounding the probe
- A61B2018/00011—Cooling or heating of the probe or tissue immediately surrounding the probe with fluids
- A61B2018/00023—Cooling or heating of the probe or tissue immediately surrounding the probe with fluids closed, i.e. without wound contact by the fluid
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00053—Mechanical features of the instrument of device
- A61B2018/00059—Material properties
- A61B2018/00089—Thermal conductivity
- A61B2018/00095—Thermal conductivity high, i.e. heat conducting
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00994—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body combining two or more different kinds of non-mechanical energy or combining one or more non-mechanical energies with ultrasound
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B2018/1467—Probes or electrodes therefor using more than two electrodes on a single probe
Landscapes
- Health & Medical Sciences (AREA)
- Surgery (AREA)
- Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Veterinary Medicine (AREA)
- Molecular Biology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Public Health (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- General Health & Medical Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- Otolaryngology (AREA)
- Plasma & Fusion (AREA)
- Physics & Mathematics (AREA)
- Surgical Instruments (AREA)
- Dentistry (AREA)
- Mechanical Engineering (AREA)
- Cardiology (AREA)
Abstract
Description
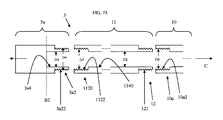
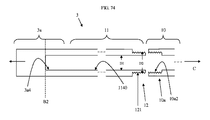
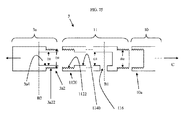
振動伝達部材11の内面1140に至る。振動伝達部材11の内面1140はねじ部分12を通って長手軸Cに沿って近位方向に延び、内部空間の開端を形成している。
Dは通常の振動伝達部材の外径であり、
ρ1は通常の振動伝達部材のチタン合金の密度であり、
ρ2は振動伝達部材用に選択されるステンレス鋼の密度である。
Claims (16)
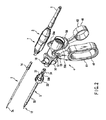
- 第一電極を備えるプローブ遠位端本体と、該プローブ遠位端本体の近位端に配設された振動伝達体とを備えるプローブであって、
前記振動伝達体が超音波トランスデューサによって生成される超音波振動を前記プローブ遠位端本体に伝達し且つ電流を前記第一電極に伝達する構成を有し、
前記プローブ遠位端本体の内部表面および前記振動伝達体の内部表面が内部空間を画定し、
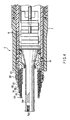
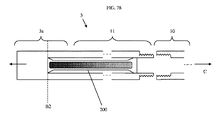
前記プローブ遠位端本体で生成される熱を放散するように構成される熱放散ユニットをさらに備え、該熱放散ユニットの少なくとも一部が前記プローブ遠位端本体および前記振動伝達体によって画定される前記内部空間内に配置されるプローブ。 - 前記熱放散ユニットが、前記プローブ遠位端本体の内部表面および前記振動伝達体の内部表面によって画定される前記内部空間内に配置されるヒートパイプを備える請求項1に記載のプローブ。
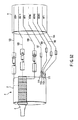
- 前記ヒートパイプの遠位端部分が、前記プローブ遠位端本体によって生成される熱エネルギーを吸収して、前記ヒートパイプの作動流体を加熱して流体相から蒸気相にする構成を有するように、前記ヒートパイプの前記遠位端部分が前記プローブ遠位端本体に熱的に連結され、
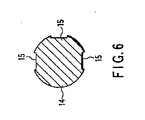
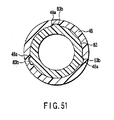
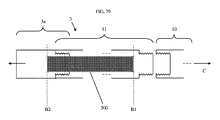
前記ヒートパイプの近位端部分が、前記作動流体を再凝縮して蒸気相から流体相に戻して前記ヒートパイプの遠位端部分から離れた位置で熱エネルギーを放出する構成を有する請求項2に記載のプローブ。 - 前記熱放散ユニットが、前記プローブ遠位端本体の内部表面および前記振動伝達体の内部表面によって画定される前記内部空間内に配置される熱放散用心材を備える請求項1に記載のプロープ
- 前記振動伝達部材が第一熱伝導率を有する第一材料を備え、
前記熱放散用心材が第二熱伝導率を有する第二材料を備える請求項4に記載のプロープ。 - 前記第一材料がステンレス鋼であり、前記第二材料が黒鉛である請求項5に記載のプロープ。
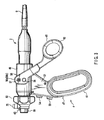
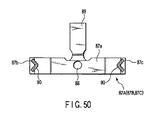
- 前記熱放熱ユニットが、
前記プローブ遠位端本体および前記振動伝達体によって画定される前記内部空間内に配置される入力配管セグメントおよび出力配管セグメントを備え、前記入力配管セグメントが前記プローブ遠位端本体と熱接触する冷媒配管と、
冷媒ポンプと、
熱交換器とを備える閉ループ冷媒循環システムを備え、
前記冷媒ポンプが、前記プローブ遠位端本体からの熱エネルギーによって加熱された冷媒を前記入力配管セグメントから前記出力配管セグメントを介して前記熱交換器に圧送する構成を有し、
前記熱交換器が、前記加熱された冷媒中の熱エネルギーを放散する構成を有し、
前記冷媒ポンプが、前記熱交換器からの冷媒を前記入力配管セグメントを介して前記プローブ遠位端本体に向けて圧送する構成を有する請求項1に記載のプローブ。 - 前記振動伝達体がステンレス鋼からなる請求項1に記載のプローブ。
- 一対の双極電極の第一電極を備え、該第一電極が、電流を伝達する第一電気路に電気的に接続するプローブ遠位端本体と、該プローブ遠位端本体の近位端に配設された振動伝達体とを備えるプローブであって、
前記振動伝達体が超音波トランスデューサによって生成される超音波振動を前記プローブ遠位端本体に伝達し且つ電流を前記第一電極に伝達する構成を有し、
前記プローブ遠位端本体の内部表面および前記振動伝達体の内部表面が内部空間を画定し、
前記プローブ遠位端本体で生成される熱を放散するように構成される熱放散ユニットをさらに備え、該熱放散ユニットの少なくとも一部が前記プローブ遠位端本体および前記振動伝達体によって画定される前記内部空間内に配置されるプローブと、
前記プローブ遠位端本体に対して相対的に動いて前記プローブ遠位端本体との距離が変化する構成を有するエンドエフェクタであって、一対の双極電極の第二電極を備え、該第二電極が、電流を伝達する第二電気路に電気的に接続する構成を有するエンドエフェクタとを備える処置器具。 - 前記熱放散ユニットが、前記プローブ遠位端本体の内部表面および前記振動伝達体の内部表面によって画定される前記内部空間内に配置されるヒートパイプを備える請求項9に記載のプローブ。
- 前記ヒートパイプの遠位端部分が、前記プローブ遠位端本体によって生成される熱エネルギーを吸収して、前記ヒートパイプの作動流体を加熱して流体相から蒸気相にする構成を有するように、前記ヒートパイプの前記遠位端部分が前記プローブ遠位端本体に熱的に連結され、
前記ヒートパイプの近位端部分が、前記作動流体を再凝縮して蒸気相から流体相に戻して前記ヒートパイプの遠位端部分から離れた位置で熱エネルギーを放出する構成を有する請求項10に記載のプローブ。 - 前記熱放散ユニットが、前記プローブ遠位端本体の内部表面および前記振動伝達体の内部表面によって画定される前記内部空間内に配置される熱放散用心材を備える請求項9に記載のプロープ
- 前記振動伝達部材が第一熱伝導率を有する第一材料を備え、
前記熱放散用心材が第二熱伝導率を有する第二材料を備える請求項12に記載のプロープ。 - 前記第一材料がステンレス鋼であり、前記第二材料が黒鉛である請求項13に記載のプロープ。
- 前記熱放熱ユニットが、
前記プローブ遠位端本体および前記振動伝達体によって画定される前記内部空間内に配置される入力配管セグメントおよび出力配管セグメントを備え、前記入力配管セグメントが前記プローブ遠位端本体と熱接触する冷媒配管と、
冷媒ポンプと、
熱交換器とを備える閉ループ冷媒循環システムを備え、
前記冷媒ポンプが、前記プローブ遠位端本体からの熱エネルギーによって加熱された冷媒を前記入力配管セグメントから前記出力配管セグメントを介して前記熱交換器に圧送する構成を有し、
前記熱交換器が、前記加熱された冷媒中の熱エネルギーを放散する構成を有し、
前記冷媒ポンプが、前記熱交換器からの冷媒を前記入力配管セグメントを介して前記プローブ遠位端本体に向けて圧送する構成を有する請求項9に記載のプローブ。 - 前記振動伝達体がステンレス鋼からなる請求項9に記載のプローブ。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US14/254,412 US9895160B2 (en) | 2014-04-16 | 2014-04-16 | Surgical operating apparatus with temperature control |
| US14/254,412 | 2014-04-16 | ||
| PCT/US2015/025862 WO2015160883A1 (en) | 2014-04-16 | 2015-04-15 | Surgical operating apparatus with temperature control |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017514568A true JP2017514568A (ja) | 2017-06-08 |
| JP2017514568A5 JP2017514568A5 (ja) | 2018-03-15 |
Family
ID=54320962
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016562213A Pending JP2017514568A (ja) | 2014-04-16 | 2015-04-15 | 温度制御付き外科手術装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9895160B2 (ja) |
| EP (1) | EP3131474B1 (ja) |
| JP (1) | JP2017514568A (ja) |
| CN (1) | CN106470618A (ja) |
| WO (1) | WO2015160883A1 (ja) |
Families Citing this family (37)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11090104B2 (en) | 2009-10-09 | 2021-08-17 | Cilag Gmbh International | Surgical generator for ultrasonic and electrosurgical devices |
| US9408622B2 (en) | 2012-06-29 | 2016-08-09 | Ethicon Endo-Surgery, Llc | Surgical instruments with articulating shafts |
| US9622767B2 (en) | 2013-09-11 | 2017-04-18 | Covidien Lp | Ultrasonic surgical instrument with cooling system |
| US20160100982A1 (en) * | 2014-10-14 | 2016-04-14 | Bausch & Lomb Incorporated | Ultrasonic vitrectomy needle |
| US10736685B2 (en) | 2015-09-30 | 2020-08-11 | Ethicon Llc | Generator for digitally generating combined electrical signal waveforms for ultrasonic surgical instruments |
| US11229471B2 (en) | 2016-01-15 | 2022-01-25 | Cilag Gmbh International | Modular battery powered handheld surgical instrument with selective application of energy based on tissue characterization |
| US11129670B2 (en) * | 2016-01-15 | 2021-09-28 | Cilag Gmbh International | Modular battery powered handheld surgical instrument with selective application of energy based on button displacement, intensity, or local tissue characterization |
| US10537351B2 (en) | 2016-01-15 | 2020-01-21 | Ethicon Llc | Modular battery powered handheld surgical instrument with variable motor control limits |
| US10342566B2 (en) | 2016-03-29 | 2019-07-09 | Covidien Lp | Devices, systems, and methods for cooling a surgical instrument |
| US10456156B2 (en) | 2016-03-29 | 2019-10-29 | Covidien Lp | Devices, systems, and methods for cooling a surgical instrument |
| JP6257850B1 (ja) * | 2016-07-11 | 2018-01-10 | オリンパス株式会社 | エネルギー処置システム及び、そのエネルギー処置システムにおけるエネルギー発生装置 |
| US10987124B2 (en) | 2016-11-22 | 2021-04-27 | Covidien Lp | Surgical instruments and jaw members thereof |
| US11266430B2 (en) | 2016-11-29 | 2022-03-08 | Cilag Gmbh International | End effector control and calibration |
| US11076910B2 (en) | 2018-01-22 | 2021-08-03 | Covidien Lp | Jaw members for surgical instruments and surgical instruments incorporating the same |
| US10881424B2 (en) | 2018-02-13 | 2021-01-05 | Covidien Lp | Removable fluid reservoir and ultrasonic surgical instrument including the same |
| US20200113619A1 (en) * | 2018-10-11 | 2020-04-16 | Rebound Therapeutics Corporation | Cautery tool for intracranial surgery |
| CN113329704B (zh) * | 2019-01-23 | 2024-09-10 | 奥林巴斯株式会社 | 能量处置器具 |
| US11883058B2 (en) * | 2019-03-26 | 2024-01-30 | Covidien Lp | Jaw members, end effector assemblies, and ultrasonic surgical instruments including the same |
| CN211409255U (zh) * | 2019-07-24 | 2020-09-04 | 嘉善飞阔医疗科技有限公司 | 防止插销脱出的可拆卸式超声波手术刀 |
| CN110479687B (zh) * | 2019-08-01 | 2022-04-15 | 合肥国轩高科动力能源有限公司 | 一种动力电池铝壳的超声清洗装置 |
| CN110731815B (zh) * | 2019-10-30 | 2020-10-09 | 杭州市第三人民医院 | 一种泌尿系统汽化电切镜 |
| US11844563B2 (en) | 2019-11-19 | 2023-12-19 | Covidien Lp | Energy-based surgical instruments incorporating cooling features |
| US12053224B2 (en) | 2019-12-30 | 2024-08-06 | Cilag Gmbh International | Variation in electrode parameters and deflectable electrode to modify energy density and tissue interaction |
| US11779387B2 (en) | 2019-12-30 | 2023-10-10 | Cilag Gmbh International | Clamp arm jaw to minimize tissue sticking and improve tissue control |
| US11950797B2 (en) | 2019-12-30 | 2024-04-09 | Cilag Gmbh International | Deflectable electrode with higher distal bias relative to proximal bias |
| US12082808B2 (en) | 2019-12-30 | 2024-09-10 | Cilag Gmbh International | Surgical instrument comprising a control system responsive to software configurations |
| US12023086B2 (en) | 2019-12-30 | 2024-07-02 | Cilag Gmbh International | Electrosurgical instrument for delivering blended energy modalities to tissue |
| US20210196358A1 (en) | 2019-12-30 | 2021-07-01 | Ethicon Llc | Electrosurgical instrument with electrodes biasing support |
| US11812957B2 (en) | 2019-12-30 | 2023-11-14 | Cilag Gmbh International | Surgical instrument comprising a signal interference resolution system |
| US11786291B2 (en) | 2019-12-30 | 2023-10-17 | Cilag Gmbh International | Deflectable support of RF energy electrode with respect to opposing ultrasonic blade |
| US11937863B2 (en) | 2019-12-30 | 2024-03-26 | Cilag Gmbh International | Deflectable electrode with variable compression bias along the length of the deflectable electrode |
| US11759251B2 (en) | 2019-12-30 | 2023-09-19 | Cilag Gmbh International | Control program adaptation based on device status and user input |
| US11944366B2 (en) | 2019-12-30 | 2024-04-02 | Cilag Gmbh International | Asymmetric segmented ultrasonic support pad for cooperative engagement with a movable RF electrode |
| US12076006B2 (en) | 2019-12-30 | 2024-09-03 | Cilag Gmbh International | Surgical instrument comprising an orientation detection system |
| US11986201B2 (en) | 2019-12-30 | 2024-05-21 | Cilag Gmbh International | Method for operating a surgical instrument |
| USD974558S1 (en) | 2020-12-18 | 2023-01-03 | Stryker European Operations Limited | Ultrasonic knife |
| WO2023139529A1 (en) * | 2022-01-21 | 2023-07-27 | Covidien Lp | Fluid-cooled ultrasonic surgical instruments |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20050203499A1 (en) * | 2004-03-09 | 2005-09-15 | Ethicon, Inc. | High intensity ablation device |
| JP2007167118A (ja) * | 2005-12-19 | 2007-07-05 | Matsushita Electric Ind Co Ltd | 超音波探触子及び超音波診断装置 |
| JP2009082711A (ja) * | 2007-09-28 | 2009-04-23 | Olympus Medical Systems Corp | 外科手術装置 |
| JP2010535087A (ja) * | 2007-07-31 | 2010-11-18 | エシコン・エンド−サージェリィ・インコーポレイテッド | 温度制御超音波外科用器具 |
Family Cites Families (31)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4867141A (en) * | 1986-06-18 | 1989-09-19 | Olympus Optical Co., Ltd. | Medical treatment apparatus utilizing ultrasonic wave |
| US5255669A (en) | 1989-04-12 | 1993-10-26 | Olympus Optical Co., Ltd. | Ultrasonic treatment apparatus |
| US5222937A (en) * | 1991-01-11 | 1993-06-29 | Olympus Optical Co., Ltd. | Ultrasonic treatment apparatus |
| US5304115A (en) | 1991-01-11 | 1994-04-19 | Baxter International Inc. | Ultrasonic angioplasty device incorporating improved transmission member and ablation probe |
| WO1992013494A1 (en) * | 1991-02-06 | 1992-08-20 | Laparomed Corporation | Electrosurgical device |
| US5830214A (en) * | 1994-11-08 | 1998-11-03 | Heartport, Inc. | Fluid-evacuating electrosurgical device |
| US6056735A (en) * | 1996-04-04 | 2000-05-02 | Olympus Optical Co., Ltd. | Ultrasound treatment system |
| US5906628A (en) * | 1996-06-26 | 1999-05-25 | Olympus Optical Co., Ltd. | Ultrasonic treatment instrument |
| US5827203A (en) | 1997-04-21 | 1998-10-27 | Nita; Henry | Ultrasound system and method for myocardial revascularization |
| US5893835A (en) * | 1997-10-10 | 1999-04-13 | Ethicon Endo-Surgery, Inc. | Ultrasonic clamp coagulator apparatus having dual rotational positioning |
| US6280441B1 (en) * | 1997-12-15 | 2001-08-28 | Sherwood Services Ag | Apparatus and method for RF lesioning |
| US6551309B1 (en) * | 2000-09-14 | 2003-04-22 | Cryoflex, Inc. | Dual action cryoprobe and methods of using the same |
| US20040097911A1 (en) | 2001-02-13 | 2004-05-20 | Olympus Optical Co., Ltd. | Ultrasonic operating apparartus and tool for changing tip thereof |
| JP4460787B2 (ja) | 2001-02-13 | 2010-05-12 | オリンパス株式会社 | 超音波処置装置 |
| US6783524B2 (en) | 2001-04-19 | 2004-08-31 | Intuitive Surgical, Inc. | Robotic surgical tool with ultrasound cauterizing and cutting instrument |
| US7004941B2 (en) * | 2001-11-08 | 2006-02-28 | Arthrocare Corporation | Systems and methods for electrosurigical treatment of obstructive sleep disorders |
| US7004940B2 (en) | 2002-10-10 | 2006-02-28 | Ethicon, Inc. | Devices for performing thermal ablation having movable ultrasound transducers |
| US7169146B2 (en) * | 2003-02-14 | 2007-01-30 | Surgrx, Inc. | Electrosurgical probe and method of use |
| EP1633236B1 (en) | 2003-06-10 | 2013-04-10 | Neomedix Corporation | Device for treatment of glaucoma and other surgical procedures and method of producing such device |
| US7037306B2 (en) * | 2003-06-30 | 2006-05-02 | Ethicon, Inc. | System for creating linear lesions for the treatment of atrial fibrillation |
| KR20070012658A (ko) | 2004-03-30 | 2007-01-26 | 올림푸스 가부시키가이샤 | 초음파 처치 장치 및 이 장치의 조립, 분해 방법, 및 초음파 처치 시스템 |
| US8007440B2 (en) | 2005-02-08 | 2011-08-30 | Volcano Corporation | Apparatus and methods for low-cost intravascular ultrasound imaging and for crossing severe vascular occlusions |
| JP2007050187A (ja) | 2005-08-19 | 2007-03-01 | Aruze Corp | 遊技機 |
| US7815641B2 (en) * | 2006-01-25 | 2010-10-19 | The Regents Of The University Of Michigan | Surgical instrument and method for use thereof |
| US8684253B2 (en) | 2007-01-10 | 2014-04-01 | Ethicon Endo-Surgery, Inc. | Surgical instrument with wireless communication between a control unit of a robotic system and remote sensor |
| US20090248050A1 (en) * | 2008-03-27 | 2009-10-01 | Yuji Hirai | Ultrasonic operating apparatus |
| US20100185196A1 (en) | 2009-01-21 | 2010-07-22 | Satomi Sakao | Medical treatment apparatus, treatment instrument and treatment method for living tissue using energy |
| US20100185197A1 (en) * | 2009-01-21 | 2010-07-22 | Satomi Sakao | Medical treatment apparatus, treatment instrument and treatment method for living tissue using energy |
| US9005199B2 (en) * | 2010-06-10 | 2015-04-14 | Ethicon Endo-Surgery, Inc. | Heat management configurations for controlling heat dissipation from electrosurgical instruments |
| WO2013102830A1 (en) | 2012-01-03 | 2013-07-11 | Reidon Technologies (Proprietary) Limited | Liquid heating with ultrasonic excitation |
| US9066681B2 (en) | 2012-06-26 | 2015-06-30 | Covidien Lp | Methods and systems for enhancing ultrasonic visibility of energy-delivery devices within tissue |
-
2014
- 2014-04-16 US US14/254,412 patent/US9895160B2/en active Active
-
2015
- 2015-04-15 WO PCT/US2015/025862 patent/WO2015160883A1/en active Application Filing
- 2015-04-15 CN CN201580032602.8A patent/CN106470618A/zh active Pending
- 2015-04-15 JP JP2016562213A patent/JP2017514568A/ja active Pending
- 2015-04-15 EP EP15780547.4A patent/EP3131474B1/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20050203499A1 (en) * | 2004-03-09 | 2005-09-15 | Ethicon, Inc. | High intensity ablation device |
| JP2007167118A (ja) * | 2005-12-19 | 2007-07-05 | Matsushita Electric Ind Co Ltd | 超音波探触子及び超音波診断装置 |
| JP2010535087A (ja) * | 2007-07-31 | 2010-11-18 | エシコン・エンド−サージェリィ・インコーポレイテッド | 温度制御超音波外科用器具 |
| JP2009082711A (ja) * | 2007-09-28 | 2009-04-23 | Olympus Medical Systems Corp | 外科手術装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3131474A4 (en) | 2018-01-17 |
| EP3131474A1 (en) | 2017-02-22 |
| EP3131474B1 (en) | 2022-03-16 |
| US20150297255A1 (en) | 2015-10-22 |
| CN106470618A (zh) | 2017-03-01 |
| US9895160B2 (en) | 2018-02-20 |
| WO2015160883A1 (en) | 2015-10-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2017514568A (ja) | 温度制御付き外科手術装置 | |
| JP5307530B2 (ja) | 外科手術装置 | |
| EP2644144B1 (en) | Bipolar treatment device | |
| JP5210779B2 (ja) | 外科手術装置 | |
| JP4758519B2 (ja) | 外科手術器具 | |
| JP5148299B2 (ja) | 超音波処置装置 | |
| JP5322720B2 (ja) | 外科手術装置 | |
| TWI721278B (zh) | 超聲外科手術器械 | |
| JP4253605B2 (ja) | 超音波処置具 | |
| JP2009082710A (ja) | 外科手術装置 | |
| JP6250234B2 (ja) | 医療機器 | |
| JP2009050704A (ja) | 外科用の手術装置 | |
| JP5322721B2 (ja) | 外科手術装置 | |
| JP2008178688A (ja) | 超音波処置装置 | |
| JP2002369825A (ja) | 外科手術用超音波器具 | |
| JP5200199B2 (ja) | 超音波処置装置 | |
| BR112012020296B1 (pt) | Instrumento cirúrgico ultrassônico | |
| EP2636382A1 (en) | Ultrasonic probe | |
| JP3600070B2 (ja) | 超音波処置具 | |
| EP2691034B1 (en) | Ultrasonic surgical instrument | |
| JP2010167084A (ja) | 超音波手術装置 | |
| WO2016127303A1 (zh) | 一种超声外科手术装置 | |
| JP2009082712A (ja) | 外科手術装置 | |
| JP4436556B2 (ja) | 外科手術用超音波処置具 | |
| JP2004049554A (ja) | 超音波処置具 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180129 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180129 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20181113 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20181116 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20190213 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20190611 |