JP2017503732A - 可動センサアセンブリを有する自動誘導式コンテナストラドルキャリア装置 - Google Patents
可動センサアセンブリを有する自動誘導式コンテナストラドルキャリア装置 Download PDFInfo
- Publication number
- JP2017503732A JP2017503732A JP2016547149A JP2016547149A JP2017503732A JP 2017503732 A JP2017503732 A JP 2017503732A JP 2016547149 A JP2016547149 A JP 2016547149A JP 2016547149 A JP2016547149 A JP 2016547149A JP 2017503732 A JP2017503732 A JP 2017503732A
- Authority
- JP
- Japan
- Prior art keywords
- carrier device
- straddle carrier
- sensor assembly
- container
- operating position
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
- 230000000712 assembly Effects 0.000 claims description 6
- 238000000429 assembly Methods 0.000 claims description 6
- 238000000034 method Methods 0.000 description 7
- 238000010276 construction Methods 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 230000003028 elevating effect Effects 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 241000239290 Araneae Species 0.000 description 1
- 230000006978 adaptation Effects 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
Images

Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C19/00—Cranes comprising trolleys or crabs running on fixed or movable bridges or gantries
- B66C19/007—Cranes comprising trolleys or crabs running on fixed or movable bridges or gantries for containers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C13/00—Other constructional features or details
- B66C13/18—Control systems or devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C13/00—Other constructional features or details
- B66C13/18—Control systems or devices
- B66C13/48—Automatic control of crane drives for producing a single or repeated working cycle; Programme control
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
- Aviation & Aerospace Engineering (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Forklifts And Lifting Vehicles (AREA)
- Warehouses Or Storage Devices (AREA)
- Loading Or Unloading Of Vehicles (AREA)
- Control Of Conveyors (AREA)
Abstract
本発明は、ガントリ昇降装置(1)をナビゲートするためのセンサアセンブリ(12)を含み、かつガントリ昇降装置(1)によって運搬されるコンテナ(8)のための空間(17)を含む、コンテナ(8)、特にISOコンテナを移送するための、ガントリ昇降装置(1) に関する。改善された無人ガントリ昇降装置(1)を作製するために、本発明に係るセンサアセンブリ(12)は作動位置では、運搬されたコンテナ(8)のための空間(17)の下でガントリ昇降装置(1)に配設され、作動位置から、センサアセンブリ(12)が運搬されるコンテナ(8)の荷取りおよび/または荷下ろしを可能にするアイドル位置に移動することができる。【選択図】 図1
Description
本発明は、ストラドルキャリア装置のナビゲーションのためのセンサアセンブリを有し、かつストラドルキャリア装置によって運搬されるコンテナ用の空間を有する、コンテナ、特にISOコンテナを荷役するためのストラドルキャリア装置に関する。
このタイプのストラドルキャリア装置は、ストラドルキャリアスタッキングワゴン、ガントリスタッキングワゴン、ストラドルキャリア、バンキャリア、シャトルキャリア、またはランナーとも呼ばれており、一般的に知られている。それらは、ターミナル、特に港湾ターミナルまたは道路と鉄道との間の複合輸送用ターミナルにおけるISO規格コンテナ用の専用荷役装置である。スプレッダと呼ばれる昇降装置および荷受け手段の助けを借りて、ストラドルキャリア装置はコンテナを吊り上げ、かつ移送後に目標位置にコンテナを降ろすことができる。ゴムタイヤを備えた床拘束ストラドルキャリア装置はクモ脚構造を含むので、地面にまたは別のコンテナの上に載置されているコンテナの上を走行することができ、加えて、施工によっては、その際に、吊り上げられたコンテナを移送することもできる。施工高さに応じて、ストラドルキャリア装置は例えば四段積み(1 over 3)装置、三段積み(1 over 2)装置等と呼ばれる。四段積み装置は、三段に積み重ねられたコンテナ上にコンテナを降ろし、三段に積み重ねられたコンテナの一つを荷取りし、あるいは荷取りされたコンテナと共に三段に積み重ねられたコンテナ上を走行することができる。これに関連して、ISOコンテナは、物品の国際輸送に使用される規格化された大容量または海上貨物コンテナと理解される。最も幅広く使用されているのは、幅が8フィート、長さが20、40、または45フィートのISOコンテナである。ストラドルキャリア装置は自由に走行することができ、通常、ディーゼル電気駆動装置、流体式ディーゼル駆動装置、または全電気駆動装置を有する。現在使用されているストラドルキャリア装置は主に手動で制御されており、この目的のために運転室が適宜設けられる。
自動制御されるストラドルキャリア装置も知られている。欧州特許第2096074号明細書には、ナビゲーションのために、衛星ナビゲーションと経路測定によってサポートされる局所的無線測位法との組合せを使用する、ストラドルキャリア装置が記載されている。コンテナまたはコンテナスタックの上を走行する領域では、ストラドルキャリア装置を自動的に操縦するためのレーザスキャナが追加的に使用される。このタイプのナビゲーションは、ストラドルキャリア装置が走行する地面にトランスポンダまたは磁石の形のマーキング要素が埋め込まれないので、いわゆるトランスポンダまたはグリッドポイントナビゲーションより有利なはずである。マーキング要素は大抵の場合、受動トランスポンダまたは磁石である。マーキング要素は港湾およびターミナル地域全域の走行経路領域の地表面全体に分配される。このトランスポンダまたはグリッドポイントナビゲーションは、FROG(Free Ranging On Grid)法とも呼ばれる。このFROG法は、自動化床拘束型ゴムタイヤ付き誘導車両に関連してドイツ特許出願公開第102006044645号に詳細に記載されている。マーキング要素に沿って誘導車両をナビゲートするために、アンテナおよび/または磁界センサの形のセンサアセンブリが誘導車両に配置される。センサアセンブリを用いて、走行車線に埋め込まれたマーキング要素は、通過時にそれらの設計に応じて認識されまたは読み取られる。この目的のために、誘導車両には広幅の平板状センサアセンブリが装着され、それらは誘導車両の前部および後部で地面の真上にそれと平行に取り付けられる。センサアセンブリは走行方向に対し直角に、誘導車両の車幅全体にわたって延び、したがって二つ以上のマーキング要素を同時に検知する。センサアセンブリを介して得られた情報は次いで、車両をナビゲートするために使用される。マーキング要素は一定のグリッドパターンで地面に埋め込まれるので、このナビゲーション方法は、グリッドポイントナビゲーションとも呼ばれる。
ドイツ特許出願公開第10323641号からフォークリフト車は知られており、そのセンサは、荷受け手段の荷物の下の領域に移動可能に配置される。
したがって、本発明の目的は、グリッドポイントナビゲーション用の改善された無人ストラドルキャリア装置を作製することである。
この目的は、請求項1の特徴を有する無人ストラドルキャリア装置により達成される。本発明の有利な実施形態は、請求項2ないし10に記載される。
本発明によれば、ストラドルキャリア装置のナビゲーション用のセンサアセンブリを有し、かつストラドルキャリア装置によって運搬されるコンテナ用の空間を有する、コンテナ、特にISOコンテナを荷役するためのストラドルキャリア装置の場合、センサアセンブリは、作動位置ではストラドルキャリア装置の運搬されるコンテナ用の空間の下に配置され、かつ作動位置から、センサアセンブリが運搬されるコンテナの荷取りおよび/または荷降ろしを可能にする非作動位置へ移動することができるので、改善が達成される。
ストラドルキャリア装置の荷役動作は、センサアセンブリがストラドルキャリア装置内の運搬されるコンテナの下の空間から非作動位置に移動することによって妨害されない。コンテナの荷取りまたは荷下ろしの後に、センサアセンブリが地面に埋め込まれたマーキング要素の真上の作動位置に移動すると、グリッドポイントナビゲーションによるストラドルキャリア装置の自動ナビゲーションが可能になる。
本発明によって、コンテナターミナルですでにグリッドポイントナビゲーションを用いてナビゲートされている自動誘導車両と共に、統合ネットワークで自動ストラドルキャリア装置を使用することも容易に可能になる。これは、ストラドルキャリア装置に対し対応する適応を施すことによって、かつターミナルの地面に対する変更無く、達成することができる。本発明に係るセンサアセンブリは単独で、ストラドルキャリア装置が、地面に近接した車両幅のセンサ装置にも拘わらず妨害されずに、コンテナ上を走行することを可能にする。本発明に係る車両幅のセンサアセンブリは、それ無しではマーキング要素のグリッドパターン密度を増大させることが必要になるという問題を解決する。
構造的に単純な方法で、ストラドルキャリア装置は、ストラドルキャリア装置がコンテナ上を走行できるように設計された構造隙間を含むように構成され、かつセンサアセンブリは、非作動位置でセンサアセンブリが構造隙間の外に配置されるように設計される。構造隙間は、地面に置かれ、まだ荷取りされていないか、あるいはすでに荷下ろしされたコンテナ上をストラドルキャリア装置が長さ方向に衝突が起きないように移動できるようにするために必要な空間を包囲し、コンテナは構造隙間内に配置され、構造隙間を通り抜ける。
ストラドルキャリア装置は自動的にナビゲートされ、センサアセンブリはグリッドポイントナビゲーションの原理に従って動作し、かつセンサアセンブリは作動位置で、ストラドルキャリア装置がその上を走行する地面に近接して、ストラドルキャリア装置に配置されるように、有利に構成される。地面に対して10から40cmの読取り距離を維持することが好ましい。
グリッドパターンに配置された利用可能なマーキング要素を使用し、かつマーキング要素のグリッドパターン密度の増大を回避することを可能にするために、センサアセンブリは作動位置で、ストラドルキャリア装置の走行方向に対し直角に配置されるようになっている。
ストラドルキャリア装置を両走行方向に容易に自動誘導することができるようにするために、少なくとも二つのセンサアセンブリがストラドルキャリア装置に配置され、そのうちの一つのセンサアセンブリは、走行方向に見て、ストラドルキャリア装置の前部に配置され、一つのセンサアセンブリはストラドルキャリア装置の後部に配置される。
さらに、ストラドルキャリア装置は、運搬されるコンテナ用の空間に隣接し、かつストラドルキャリア装置の走行方向に向けられた、二つの相互に平行な駆動歯車支持体を有し、かつセンサアセンブリが作動位置で、地面に近接する二つの駆動歯車支持体の間の領域にまたがるようにすることが、構造的に有利である。
センサアセンブリは、駆動歯車支持体に配置されたスピンドルを中心に、作動位置から非作動位置へ枢動できるようにすることが構造的に有利である。これに関連して、地面と平行に枢動することのできる側方センサアセンブリ、および上方に枢動できるセンサアセンブリの可能性が存在する。それに対応して、スピンドルは垂直方向にまたは走行方向に向けられ、センサアセンブリは非作動位置で垂直方向に、または駆動歯車支持体の長手方向に向けられる。それはまた、スピンドルが垂直方向に、または走行方向に向けられ、センサアセンブリが非作動位置で垂直方向に、または駆動歯車支持体の長手方向に向けられるという有利な結果をもたらす。
センサアセンブリはいずれの場合も全体として短くなるので、非作動位置に枢動するかまたは折り畳まれるプロセスを簡単にすることができるように、有利な方法で、センサアセンブリは真ん中で二つの別個の部品に分割される。その場合、センサアセンブリの部品のための受容空間は、それに対応して小さくなるように選択することもできる。
センサアセンブリは、作動駆動装置を介して自動制御により移動することができるように構成することが有利である。
本発明の二つの例示的実施形態について、以下の図面を用いて説明する。
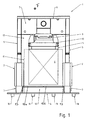
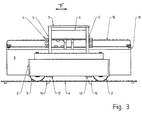
図1は、コンテナ荷役作業でグリッドポイントナビゲーションの助けを借りて自動的に誘導されるストラドルキャリア装置1に適用される第一実施形態を用いて、本発明の原理の概略図を示す。図2および図3は、図1を下および横から見た図を示す。ストラドルキャリア装置1の第一実施形態について、以下で図1ないし図3の助けを借りて説明する。
ストラドルキャリア装置1は、ストラドルキャリア装置1の長手方向に向けられた、相互に平行な二つの駆動歯車支持体2を有し、そこに操舵自在車輪3が取り付けられるが、そのうちの前輪3だけが示されている。駆動歯車支持体2の片側にそれぞれ二つずつ配置される車輪3はゴムタイヤ付きであり、好ましくは港湾のコンテナターミナルの地面4上を走行する。車輪3は、従来の方法で仮想的矩形の隅に配置される。基本的に、技術上の理由から必要ならば、五つ以上のゴムタイヤ付き車輪3を設けることも可能である。しかし、これは次いでストラドルキャリア装置1全体の複雑さの増大を伴い、したがって駆動および操舵の領域でより複雑な技術を使用しなければならない。自動誘導式ストラドルキャリア装置1の場合、操舵される車輪3の数が増加するため、ナビゲーションもより複雑になる。支柱5は二つの駆動歯車支持体2の各々の前部および後部から延び、したがって全部で四つの支柱5が垂直方向上方に延びてガントリ7を形成し、その上に機械プラットホーム6が配置され、支柱5を接続する。コンテナ8用の昇降装置9はガントリ7の機械プラットホーム6上に配置され、この昇降装置に対し、スプレッダ10と呼ばれるコンテナ8用の荷取り手段が、コンテナを昇降させることができるように接続される。荷物をピックアップするために、スプレッダ10はコンテナ8の四隅の金具11に係止することができる。空間17はガントリ7および駆動歯車支持体2によって囲まれ、この空間内に、ストラドルキャリア装置1によって運搬されたコンテナ8は、スプレッダ10によって荷取りされた後、かつ昇降装置9によって搬送位置内に持ち上げられた後で、すなわち依然として運搬中に、配置される。
ストラドルキャリア装置1の下方領域には、センサアセンブリ12が駆動歯車支持体2上に配置され、水平方向にまたは地面4と平行に向けられ、その長手方向の広がりはストラドルキャリア装置1の走行方向Fに対して直角に、ほぼその全幅にわたって延びる。センサアセンブリ12は、二つの駆動歯車支持体2の間で少なくとも空間17の幅を網羅する。これは、コンテナ8が空間17内に位置している場合、すなわちもはや地面4に降ろされていない場合であり、センサアセンブリ12は空間17の下の図1に示す作動位置内にある。換言すると、センサアセンブリ12は、センサアセンブリ12が作動位置に着いているときに空間17の底部を画定する。センサアセンブリ12は、ストラドルキャリア装置1がコンテナ8無しで空で走行しているときでも、作動位置にある。
ストラドルキャリア装置1がコンテナ8の荷取りおよび/または荷下ろしを行うことができるようにするために、センサアセンブリ12は作動位置から、運搬されるコンテナ8の荷取りおよび/または荷下ろしのために必要なコンテナ8の移動をセンサアセンブリ12が可能にする非作動位置へ移動される。図1で、破線は、非作動位置のときにセンサアセンブリ12がそこに入らないように維持される、構造隙間15を示す。この構造隙間15はその結果、コンテナ8の荷取りまたは荷下ろしのために必要な空間を、ストラドルキャリア装置1によって好ましくは長さ方向に包囲し、かつこの目的のために、このコンテナを−図面の平面に対して直角に移動させる。したがって、コンテナ8はコンテナ8の荷取り中、荷下ろし中、および運搬中にも構造隙間15内に配置され、それを通過する。図1に示す作動位置で、センサアセンブリ12は、スプレッダ10に懸吊され、したがって空間17内に配置されたコンテナ8の下の構造隙間15を遮断する。
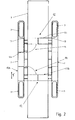
コンテナ8の上昇、下降、荷下ろし、および荷取りのために空間17、特に構造隙間15を解放することができるようにするために、センサアセンブリ12は一部品の要素ではなく、略真ん中で二つの部品12a、12bに分割される(図2も参照されたい)。これに関連して、部品12a、12bは各々両端部の片方が、垂直方向にまたは地面4に対して直角に向けられたスピンドル13を中心に関着される(図2も参照されたい)。部品12a、12bは各々、作動駆動装置(図示せず)によって、ストラドルキャリア装置1の走行方向Fに対して直角に向けられた水平作動位置から走行方向Fに沿って向けられた水平非作動位置へ、スピンドル13を中心に枢動する。ストラドルキャリア装置1の駆動装置の設計に応じて、油圧または電気作動駆動装置が可能である。これに関連して、部品12a、12bは、円のセグメントの形をした枢動領域14に沿って非作動位置と作動位置との間を移動する。ストラドルキャリア装置1の走行方向Fは、駆動歯車支持体2の長手方向の広がりと平行に延びる。
センサアセンブリ12はアンテナおよび/または磁界センサを含み、それにより、コンテナターミナルの地面4に配置されたトランスポンダまたは磁石の形のマーキング要素16を検知し、または読み取ることができる。ストラドルキャリア装置1の走行動作中に、センサアセンブリ12は、その下の地面4に位置するマーキング要素16を検知することができ、かつ対応する測定信号がストラドルキャリア装置1の自動ナビゲーション内に流入することができるように、地面に近接した領域のその水平作動位置内に枢動する。好ましくは、センサアセンブリ12と地面4またはそこに配置されたマーキング要素16との間の空間は、地面4に配置されたマーキング要素16までの対応する読取り距離が必要なので、約10から40cmになる。ストラドルキャリア装置1によって運搬されるコンテナ8はこうして、スプレッダ10で空間17内のセンサアセンブリ12より上の距離に懸吊される。
図示する通り、設けられたマーキング要素の最適検知が可能になるように、駆動歯車支持体2間の地面4の領域全体が作動位置のセンサアセンブリ12によってカバーされ、したがってストラドルキャリア装置1の略全幅がカバーされる。対応するように、二つの部品12a、12bを持つ各センサアセンブリ12は作動位置で構造隙間15と交差する。スプレッダ10に懸吊されたコンテナ8を荷下ろしのために下降させることができるようにするため、かつ地面4に置かれており、まだ荷取りされていないか、あるいはすでに荷下ろしされたコンテナ8の上を走行できるようにするために、センサアセンブリ12を最初に、センサアセンブリ12が構造隙間15の外に配置され、もはやそれと交差しなくなる非作動位置に移動させなければならない。
二つのセンサアセンブリ12またはそのそれぞれの部品12a、12bは、長手方向の広がりより小さい幅を有する扁平筐体に収容されることが好ましい。同等に自動的な前方および後方の走行が可能になるように、二つのセンサアセンブリ12の一つは、走行方向Fに見て、ストラドルキャリア装置1の前部領域に設けられ、一つのセンサアセンブリ12は後部領域に設けられる(図2および図3を参照されたい)。
図1は、各々作動位置にある部品12a、12bを示す。図2は、枢動領域14、非作動位置にある二つのセンサアセンブリ12の左側の部品12a、および作動位置にある二つのセンサアセンブリ12の右側の部品12bを示す。実際の作動中の状態は示されていない。
図4は、ストラドルキャリア装置1の第二実施形態の概略図を示す。このストラドルキャリア装置1は、上述したストラドルキャリア装置1に実質的に匹敵する。したがって上記の説明を参照する。これらの二つのストラドルキャリア装置1は、部品12a、12bの枢動領域14の位置、ならびにしたがってスピンドル13の配置および向きが異なる。実線で示されたセンサアセンブリ12の左側の部品12aは、垂直非作動位置で示される一方、破線はセンサアセンブリ12の部品12aの作動位置を示す。逆に、センサアセンブリ12の第二部品12bは、右側に作動位置で実線で示される一方、破線は部品12bの非作動位置を示す。この目的のために、部品12a、12bは各々両端の片方が、水平方向にまたは地面4に対して水平方向にかつストラドルキャリア装置1の走行方向Fに向けられたスピンドル13を中心に関着される。部品12a、12bは各々、作動駆動装置(図示せず)によって、いずれの場合もスピンドル13を中心に、ストラドルキャリア装置1の走行方向Fに対して直角に向けられた水平作動位置から、走行方向Fに対して直角に向けられた垂直非作動位置へ枢動することができる。この図は、走行動作中にはセンサアセンブリ12の両部品12aおよび12bが水平作動位置にあり続けるが、荷役動作中にはセンサアセンブリ12の両部品12aおよび12bが非作動位置にあるという機能を理解する目的に役立つ。
例示的実施形態は単に、センサアセンブリ12を移動させるための一つの可能な変形例を示すだけである。センサアセンブリ12が作動位置と非作動位置との間で移動できるようにするために、他の枢結、折畳み固定、または回転固定が可能である。センサアセンブリ12の複合移動手順を可能にするために、空間的に移動可能な機構を設けることもできる。当然、構造隙間15の外に非作動位置用の空間が利用可能であることを前提として、非分割センサアセンブリ12も使用することができる。
まだ荷取りされていないか、あるいはすでに荷下ろしされたコンテナ8上をストラドルキャリア装置1が走行しており、かつセンサアセンブリ12が非作動位置にあるときでも、ストラドルキャリア装置1が自動的に制御可能かつ操舵可能であるために、ストラドルキャリア装置1は、例えばレーザスキャナの形の追加センサを備えることができる。コンテナ8上の走行がある程度完了して、センサアセンブリ12を作動位置に、かつしたがって構造隙間15内に移動できるようになるまで、これらの追加センサによって、コンテナ8に対するストラドルキャリア装置1の位置を決定し、ストラドルキャリア装置1のナビゲーションのために使用することができる。
1 ストラドルキャリア装置
2 駆動歯車支持体
3 車輪
4 地面
5 支柱
6 機械プラットホーム
7 ガントリ
8 コンテナ
9 昇降装置
10 スプレッダ
11 隅金具
12 センサアセンブリ
12a センサアセンブリの部品
12b センサアセンブリの部品
13 スピンドル
14 枢動経路
15 構造隙間
16 マーキング要素
17 空間
F 走行方向
2 駆動歯車支持体
3 車輪
4 地面
5 支柱
6 機械プラットホーム
7 ガントリ
8 コンテナ
9 昇降装置
10 スプレッダ
11 隅金具
12 センサアセンブリ
12a センサアセンブリの部品
12b センサアセンブリの部品
13 スピンドル
14 枢動経路
15 構造隙間
16 マーキング要素
17 空間
F 走行方向
Claims (10)
- ストラドルキャリア装置(1)のナビゲーションのためのセンサアセンブリ(12)を有し、かつストラドルキャリア装置(1)によって運搬されるコンテナ(8)用の空間(17)を有する、コンテナ(8)、特にISOコンテナを荷役するためのストラドルキャリア装置(1)であって、前記センサアセンブリ(12)は作動位置で、運搬されるコンテナ(8)用の空間(17)の下で前記ストラドルキャリア装置(1)に配置され、かつ前記作動位置から、前記センサアセンブリ(12)が運搬される前記コンテナ(8)の荷取りおよび/または荷下ろしを可能にする非作動位置へ移動させることができることを特徴とする、ストラドルキャリア装置(1)。
- 前記ストラドルキャリア装置(1)は、前記ストラドルキャリア装置(1)がコンテナ(8)上を移動することができるように設計された構造隙間(15)を含み、かつ前記センサアセンブリ(12)は、前記センサアセンブリ(12)が非作動位置で前記構造隙間(15)の外に配置されるように設計されることを特徴とする、請求項1に記載のストラドルキャリア装置(1)。
- 前記ストラドルキャリア装置(1)は自動的にナビゲートされ、前記センサアセンブリ(12)はグリッドポイントナビゲーションの原理に従って動作し、かつ前記センサアセンブリ(12)は作動位置で、前記ストラドルキャリア装置(1)がその上を移動する地面(4)に近接して前記ストラドルキャリア装置(1)に配置されることを特徴とする、請求項1または2に記載のストラドルキャリア装置(1)。
- 前記センサアセンブリ(12)は作動位置で、前記ストラドルキャリア装置(1)の走行方向(F)に対して直角に配置されることを特徴とする、請求項1〜3のいずれかに記載のストラドルキャリア装置(1)。
- 少なくとも二つのセンサアセンブリ(12)が前記ストラドルキャリア装置(1)に配置され、そのうちの一つのセンサアセンブリ(12)は、走行方向(F)に見て、前記ストラドルキャリア装置(1)の前部に配置され、かつ一つのセンサアセンブリ(12)は前記ストラドルキャリア装置(1)の後部に配置されることを特徴とする、請求項1〜4のいずれかに記載のストラドルキャリア装置(1)。
- 前記ストラドルキャリア装置(1)は、運搬されるコンテナ(8)用の前記空間(17)に隣接しかつ前記ストラドルキャリア装置(1)の走行方向(F)に向けられる二つの相互に平行な駆動歯車支持体(2)を有し、かつ前記センサアセンブリ(12)は作動位置で、地面に近接して前記二つの駆動歯車支持体(2)の間の領域にまたがることを特徴とする、請求項1〜5のいずれかに記載のストラドルキャリア装置(1)。
- 前記センサアセンブリ(12)は、前記駆動歯車支持体(2)に配置されたスピンドル(13)を中心に前記作動位置から前記非作動位置へ枢動することができることを特徴とする、請求項6に記載のストラドルキャリア装置(1)。
- 前記スピンドル(13)は垂直方向にまたは走行方向(F)に向けられ、かつ前記センサアセンブリ(12)は前記非作動位置で、垂直方向にまたは前記駆動歯車支持体(2)の長手方向に向けられることを特徴とする、請求項7に記載のストラドルキャリア装置(1)。
- 前記センサアセンブリ(12)は真ん中で二つの別個の部品(12a、 12b)に分割されることを特徴とする、請求項1〜8のいずれかに記載のストラドルキャリア装置(1)。
- 前記センサアセンブリ(12)は作動駆動装置を介して自動制御により移動させることができることを特徴とする、請求項1〜9のいずれかに記載のストラドルキャリア装置(1)。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102014100833.2 | 2014-01-24 | ||
| DE201410100833 DE102014100833B3 (de) | 2014-01-24 | 2014-01-24 | Automatisch geführtes Container-Portalhubgerät mit bewegbarer Sensoranordnung |
| PCT/EP2015/051269 WO2015110539A1 (de) | 2014-01-24 | 2015-01-22 | Automatisch geführtes container-portalhubgerät mit bewegbarer sensoranordnung |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017503732A true JP2017503732A (ja) | 2017-02-02 |
Family
ID=52464333
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016547149A Ceased JP2017503732A (ja) | 2014-01-24 | 2015-01-22 | 可動センサアセンブリを有する自動誘導式コンテナストラドルキャリア装置 |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US20160332848A1 (ja) |
| EP (1) | EP3097045A1 (ja) |
| JP (1) | JP2017503732A (ja) |
| CN (1) | CN105980287A (ja) |
| AU (1) | AU2015208174A1 (ja) |
| DE (1) | DE102014100833B3 (ja) |
| SG (1) | SG11201605736VA (ja) |
| WO (1) | WO2015110539A1 (ja) |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102015202734A1 (de) | 2015-02-16 | 2016-08-18 | Terex Cranes Germany Gmbh | Kran und Verfahren zum Beeinflussen einer Verformung eines Auslegersystems eines derartigen Krans |
| CA2985263A1 (en) * | 2015-05-06 | 2016-11-10 | Crown Equipment Corporation | Industrial vehicle comprising tag reader and reader module |
| KR101573184B1 (ko) * | 2015-07-23 | 2015-11-30 | 한국가스공사 | Lng 탱크 컨테이너 로딩 및 언로딩 장치 |
| CN106082016A (zh) * | 2016-05-24 | 2016-11-09 | 山西东械自动化科技有限公司 | 叉板式搬运小车 |
| DE102016119793A1 (de) | 2016-10-18 | 2018-04-19 | Terex Mhps Gmbh | Portalhubgerät zum Umschlag von Containern mit einer Sensorvorrichtung |
| DE102016119839A1 (de) * | 2016-10-18 | 2018-04-19 | Terex Mhps Gmbh | Verfahren zum automatischen Positionieren eines Portalhubstaplers für Container und Portalhubstapler dafür |
| DE102017112661A1 (de) * | 2017-06-08 | 2018-12-13 | Konecranes Global Corporation | Automatisch geführtes Portalhubgerät für Container und Verfahren zum Betrieb eines solchen Portalhubgeräts |
| CN107777549B (zh) * | 2017-12-08 | 2024-07-12 | 王马达 | 卷钢抱移器及装有该抱移器的集装箱装载卷钢系统及该系统的使用方法 |
| CN110450798A (zh) * | 2019-08-30 | 2019-11-15 | 深圳空铁科技股份有限公司 | 集装箱的空铁联运系统 |
| CN111994799A (zh) * | 2020-08-05 | 2020-11-27 | 龙合智能装备制造有限公司 | 一种无人驾驶智能龙门架结构的搬运车及其使用方法 |
| CN112551444A (zh) * | 2020-12-03 | 2021-03-26 | 湖北三江航天万山特种车辆有限公司 | 一种混合锅升降装置 |
| CN112978579B (zh) * | 2021-05-13 | 2021-07-23 | 新乡职业技术学院 | 一种具有防碰撞控制系统的起重机 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001322720A (ja) * | 2000-05-16 | 2001-11-20 | Tcm Corp | コンテナ荷役方法およびコンテナ荷役システム |
| JP2007145490A (ja) * | 2005-11-28 | 2007-06-14 | Mitsubishi Heavy Ind Ltd | 移動体制御装置、これを用いた移動体、及び移動体制御方法 |
| JP2014511807A (ja) * | 2011-04-06 | 2014-05-19 | ゴットヴァルト ポート テクノロジー ゲーエムベーハー | 電気駆動装置を備えたストラドルキャリア装置 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE10323641A1 (de) * | 2003-05-26 | 2005-01-05 | Daimlerchrysler Ag | Bewegliche Sensoreinrichtung am Lastmittel eines Gabelstaplers |
| DE102006044645A1 (de) | 2006-09-21 | 2008-04-10 | Gottwald Port Technology Gmbh | Verfahren und System zur Bestimmung der Position und Ausrichtung eines unbemannten Fahrzeugs sowie entsprechendes Fahrzeug |
| DE102008011539B3 (de) | 2008-02-28 | 2009-06-18 | Noell Mobile Systems Gmbh | Vollautomatischer Portalhubstapler mit lokaler Funkortung und Laserlenkung |
| AU2012246152B2 (en) * | 2011-04-21 | 2015-05-28 | Konecranes Global Corporation | Techniques for positioning a vehicle |
-
2014
- 2014-01-24 DE DE201410100833 patent/DE102014100833B3/de not_active Expired - Fee Related
-
2015
- 2015-01-22 WO PCT/EP2015/051269 patent/WO2015110539A1/de active Application Filing
- 2015-01-22 SG SG11201605736VA patent/SG11201605736VA/en unknown
- 2015-01-22 EP EP15703479.4A patent/EP3097045A1/de not_active Withdrawn
- 2015-01-22 CN CN201580005585.9A patent/CN105980287A/zh active Pending
- 2015-01-22 AU AU2015208174A patent/AU2015208174A1/en not_active Abandoned
- 2015-01-22 JP JP2016547149A patent/JP2017503732A/ja not_active Ceased
- 2015-01-22 US US15/112,621 patent/US20160332848A1/en not_active Abandoned
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001322720A (ja) * | 2000-05-16 | 2001-11-20 | Tcm Corp | コンテナ荷役方法およびコンテナ荷役システム |
| JP2007145490A (ja) * | 2005-11-28 | 2007-06-14 | Mitsubishi Heavy Ind Ltd | 移動体制御装置、これを用いた移動体、及び移動体制御方法 |
| JP2014511807A (ja) * | 2011-04-06 | 2014-05-19 | ゴットヴァルト ポート テクノロジー ゲーエムベーハー | 電気駆動装置を備えたストラドルキャリア装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| AU2015208174A1 (en) | 2016-07-21 |
| WO2015110539A1 (de) | 2015-07-30 |
| EP3097045A1 (de) | 2016-11-30 |
| DE102014100833B3 (de) | 2015-03-19 |
| US20160332848A1 (en) | 2016-11-17 |
| SG11201605736VA (en) | 2016-08-30 |
| CN105980287A (zh) | 2016-09-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2017503732A (ja) | 可動センサアセンブリを有する自動誘導式コンテナストラドルキャリア装置 | |
| JP5886863B2 (ja) | コンテナ積み替えシステム | |
| US10202267B2 (en) | Systems and methods for sensing a load carried by a material handling vehicle | |
| CN109952267B (zh) | 用于装卸集装箱的跨运车形式的门式起重装置的导航系统 | |
| JP5834078B2 (ja) | 貨物を取り扱うシステム | |
| JP5755404B2 (ja) | コンテナターミナル | |
| KR20070033972A (ko) | 수송기구 자동 적재 시스템 및 방법 | |
| US11702323B2 (en) | Automatically guided lifting gantry device for containers and method for operating such a lifting gantry device | |
| JP2018111589A (ja) | 水平搬送台車 | |
| JP6492324B2 (ja) | コンテナターミナル | |
| JP2011240781A (ja) | 自走搬送装置及び台車搬送方法 | |
| CN109963806B (zh) | 对用于集装箱的跨运车自动定位的方法及其跨运车 | |
| TWI709522B (zh) | 感應器吊運車及相應的貨櫃起重機 | |
| KR20170033259A (ko) | 컨테이너를 위한 중간 보관 영역을 구비한 스태커 크레인 | |
| CN110944926A (zh) | 用于无线电定位用于集装箱的运输车辆的系统 | |
| US20230202817A1 (en) | Control method for mobile object, mobile object, and computer-readable storage medium | |
| WO2023104088A1 (zh) | 一种装卸方法及潜伏agv、复合四脚托盘和叉车agv | |
| CN108910770A (zh) | 一种叉车 | |
| ITTO20080883A1 (it) | Sistema automatico per la manipolazione ed il trasporto di container tra una banchina di porto ed un sito di stoccaggio situato nell' entroterra | |
| CN116057002A (zh) | 起重机及起重机控制系统 | |
| CN208916744U (zh) | 一种叉车 | |
| JP6113551B2 (ja) | コンテナターミナル及びコンテナターミナルの運用方法 | |
| JP6936599B2 (ja) | 水平搬送台車 | |
| JP7052398B2 (ja) | 無人搬送車の制御方法 | |
| JP7373952B2 (ja) | 搬送システム及び無人搬送車 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160826 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170605 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170801 |
|
| A045 | Written measure of dismissal of application [lapsed due to lack of payment] |
Free format text: JAPANESE INTERMEDIATE CODE: A045 Effective date: 20171226 |