JP2017203683A - 静電容量型の3軸加速度センサ - Google Patents
静電容量型の3軸加速度センサ Download PDFInfo
- Publication number
- JP2017203683A JP2017203683A JP2016095242A JP2016095242A JP2017203683A JP 2017203683 A JP2017203683 A JP 2017203683A JP 2016095242 A JP2016095242 A JP 2016095242A JP 2016095242 A JP2016095242 A JP 2016095242A JP 2017203683 A JP2017203683 A JP 2017203683A
- Authority
- JP
- Japan
- Prior art keywords
- electrode
- divided
- acceleration
- capacitance value
- divided electrode
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Landscapes
- Force Measurement Appropriate To Specific Purposes (AREA)
- Pressure Sensors (AREA)
Abstract
【課題】 センササイズを維持しながら、電極面積を増加させてセンサ感度を高める。【解決手段】 可撓板12を有する重錘可撓部材2、可撓板12の一方側/他方側の表面に配される第1、第2の変位電極3、4、及び第1の変位電極3に向き合う第1の固定電極5と、第2の変位電極4に向き合う第2の固定電極6とを具える。第1、第2の固定電極5、6は、それぞれX方向加速度成分検出軸及びY方向加速度成分検出軸により分割された4つのセグメント状の分割電極片Eを含む。【選択図】図1
Description
本発明は、検出精度を高めうる静電容量型の3軸加速度センサに関する。
静電容量型の3軸加速度センサとして、例えば下記の特許文献1に記載のものが知られている。この加速度センサは、図9(A)に略示するように、
(1)重錘aが取り付けられた可撓板bと、
(2)可撓板bの一方側の表面および他方側の表面に配される第1、第2の変位電極d1、d2と、
(3)前記第1、第2の変位電極d1、d2にそれぞれ向き合う第1、第2の固定電極f1、f2とを具える。
(1)重錘aが取り付けられた可撓板bと、
(2)可撓板bの一方側の表面および他方側の表面に配される第1、第2の変位電極d1、d2と、
(3)前記第1、第2の変位電極d1、d2にそれぞれ向き合う第1、第2の固定電極f1、f2とを具える。
図9(B)に示すように、第1の固定電極f1は、X方向加速度成分検出軸上かつ原点0の両側で対置するX方向の加速度測定専用の一対の電極片eX1、eX2、Y方向加速度成分検出軸上かつ原点0の両側で対置するY方向の加速度測定専用の一対の電極片eY1、eY2、及び原点0の位置に配されるZ方向の加速度測定専用の電極片eZ1から形成される。又第2の固定電極f2も同様に、X方向加速度成分検出軸上かつ原点0の両側で対置するX方向の加速度測定専用の一対の電極片eX3、eX4、Y方向加速度成分検出軸上かつ原点0の両側で対置するY方向加速度成分検出軸方向の加速度測定専用の一対の電極片eY3、eY4、及び原点0の位置に配されるZ方向の加速度測定専用の電極片eZ2から形成される。
そして、電極片eZ1による静電容量値をc11、電極片eX1、eX2の静電容量値をc12、c14、電極片eY1、eY2の静電容量値をc13、c15、電極片eZ2による静電容量値をc21、電極片eX3、eX4の静電容量値をc22、c24、電極片eY3、eY4の静電容量値をc23、c25としたとき、XYZ方向の加速度GX、GY、GZに対応する静電容量値cX、cY、cZを、次式(1')〜(3')により算出して、各加速度GX、GY、GZを検出している。
cX=(c12−c14)−(c22−c24) --(1')
cY=(c13−c15)−(c23−c25) --(2')
cZ=(c11)−(c21) --(3')
cX=(c12−c14)−(c22−c24) --(1')
cY=(c13−c15)−(c23−c25) --(2')
cZ=(c11)−(c21) --(3')
この3軸加速度センサでは、X方向、Y方向、Z方向の加速度が独立して作用した場合、第2の変位電極d2及び第2の固定電極f2がない場合に比して、感度を約2倍に高めることができる。又X方向(又はY方向)と同時にZ方向の加速度が作用した場合においても、Z方向の加速度の影響を排除でき、検出精度を向上させることが可能となる。
しかし近年の高性能化の要求に鑑み、検出精度のさらなる向上が強く望まれる。なお、静電容量値Cは、誘電率εと、電極面積Sと、電極間距離dとから、次式で与えられる。
C = ε×S/d
従って、電極面積Sを増加させることで、静電容量値Cであるセンサ感度を高めることが可能である。しかしその反面、センササイズの大型化を招くという問題があり、電極面積Sの増加には限界があった。
C = ε×S/d
従って、電極面積Sを増加させることで、静電容量値Cであるセンサ感度を高めることが可能である。しかしその反面、センササイズの大型化を招くという問題があり、電極面積Sの増加には限界があった。
そこで本発明は、各電極片をX方向の加速度測定、Y方向の加速度測定、及びZ方向の加速度測定に兼用させることを基本として、センササイズを維持しながら、電極面積を増加させることができ、センサ感度を高めて検出精度の向上を図りうる静電容量型の3軸加速度センサを提供することを課題としている。
本発明は、XYZ方向の加速度を検出する3軸加速度センサであって、
重錘が取り付けられかつこの重錘に作用する加速度により変位する可撓板を有する重錘可撓部材、
前記可撓板のZ方向の一方側の表面に配される第1の変位電極と、他方側の表面に配される第2の変位電極、
及び前記第1の変位電極に向き合う第1の固定電極と、前記第2の変位電極に向き合いかつ第1の固定電極とは互いに平行に配される第2の固定電極とを具えるとともに、
前記第1、第2の固定電極は、それぞれX方向加速度成分検出軸及びY方向加速度成分検出軸により分割されかつ電気的に独立した4つのセグメント状の分割電極片を含むことを特徴としている。
重錘が取り付けられかつこの重錘に作用する加速度により変位する可撓板を有する重錘可撓部材、
前記可撓板のZ方向の一方側の表面に配される第1の変位電極と、他方側の表面に配される第2の変位電極、
及び前記第1の変位電極に向き合う第1の固定電極と、前記第2の変位電極に向き合いかつ第1の固定電極とは互いに平行に配される第2の固定電極とを具えるとともに、
前記第1、第2の固定電極は、それぞれX方向加速度成分検出軸及びY方向加速度成分検出軸により分割されかつ電気的に独立した4つのセグメント状の分割電極片を含むことを特徴としている。
本発明に係る静電容量型の3軸加速度センサでは、前記第1、第2の固定電極は、それぞれ4つの分割電極片からなることが好ましい。
本発明に係る静電容量型の3軸加速度センサでは、各前記分割電極片は、互いに同形であることが好ましい。
本発明に係る静電容量型の3軸加速度センサでは、前記第1の固定電極の分割電極片は、X−Y座標系における、第1象限に位置する静電容量値C1の第1分割電極片E1と、第2象限に位置する静電容量値C2の第2分割電極片E2と、第3象限に位置する静電容量値C3の第3分割電極片E3と、第4象限に位置する静電容量値C4の第4分割電極片E4とからなり、
かつ前記第2の固定電極の分割電極片は、X−Y座標系における、第1象限に位置する静電容量値C5の第5分割電極片E5と、第2象限に位置する静電容量値C6の第6分割電極片E6と、第3象限に位置する静電容量値C7の第7分割電極片E7と、第4象限に位置する静電容量値C8の第8分割電極片E8とからなるとともに、
X方向の加速度GXに対応する静電容量値CX、Y方向の加速度GYに対応する静電容量値CY、Z方向の加速度GZに対応する静電容量値CZの何れか一つは、全ての静電容量値C1、C2、C3、C4、C5、C6、C7、C8に基づいて算出し、前記重錘に作用した加速度GX、GY、GZの何れか一つを検出することが好ましい。
かつ前記第2の固定電極の分割電極片は、X−Y座標系における、第1象限に位置する静電容量値C5の第5分割電極片E5と、第2象限に位置する静電容量値C6の第6分割電極片E6と、第3象限に位置する静電容量値C7の第7分割電極片E7と、第4象限に位置する静電容量値C8の第8分割電極片E8とからなるとともに、
X方向の加速度GXに対応する静電容量値CX、Y方向の加速度GYに対応する静電容量値CY、Z方向の加速度GZに対応する静電容量値CZの何れか一つは、全ての静電容量値C1、C2、C3、C4、C5、C6、C7、C8に基づいて算出し、前記重錘に作用した加速度GX、GY、GZの何れか一つを検出することが好ましい。
本発明に係る静電容量型の3軸加速度センサでは、前記静電容量値CX、CY、CZの何れか一つは、次式(1)〜(3)に基づいて算出することが好ましい。
CX=(C1+C4)−(C2+C3)+(C6+C7)−(C5+C8) ---(1)
CY=(C1+C2)−(C3+C4)+(C7+C8)−(C5+C6) ---(2)
CZ=(C1+C4)+(C2+C3)−(C5+C8)−(C6+C7) ---(3)
CX=(C1+C4)−(C2+C3)+(C6+C7)−(C5+C8) ---(1)
CY=(C1+C2)−(C3+C4)+(C7+C8)−(C5+C6) ---(2)
CZ=(C1+C4)+(C2+C3)−(C5+C8)−(C6+C7) ---(3)
本発明に係る静電容量型の3軸加速度センサでは、前記可撓板は、X方向加速度成分検出軸とY方向加速度成分検出軸とが交わる原点位置を含みかつ前記重錘が取り付く中央側領域、前記可撓板が固定される外周領域、及び前記中央側領域と外周領域との間の可撓領域を具え、
該可撓領域は、前記原点を円弧中心とした半径方向内外の円弧状スリットを有し、かつ前記半径方向内外の円弧状スリットは、それぞれ周方向に4等分される分割スリットからなり、
前記半径方向内側の円弧状スリットをなす分割スリットには、その周方向一端部から半径方向内側にのびる第1の半径方向スリット部が配され、
前記半径方向外側の円弧状スリットをなす分割スリットには、その周方向一端部から半径方向内側にのびる第2の半径方向スリット部が配され、
しかも前記第1、第2の半径方向スリット部は、X方向加速度成分検出軸又はY方向加速度成分検出軸を挟んだ両側で互いに向かい合うとともに、
前記半径方向内側の円弧状スリットをなす分割スリットは、その周方向他端部が、前記第2の半径方向スリット部に接続することが好ましい。
該可撓領域は、前記原点を円弧中心とした半径方向内外の円弧状スリットを有し、かつ前記半径方向内外の円弧状スリットは、それぞれ周方向に4等分される分割スリットからなり、
前記半径方向内側の円弧状スリットをなす分割スリットには、その周方向一端部から半径方向内側にのびる第1の半径方向スリット部が配され、
前記半径方向外側の円弧状スリットをなす分割スリットには、その周方向一端部から半径方向内側にのびる第2の半径方向スリット部が配され、
しかも前記第1、第2の半径方向スリット部は、X方向加速度成分検出軸又はY方向加速度成分検出軸を挟んだ両側で互いに向かい合うとともに、
前記半径方向内側の円弧状スリットをなす分割スリットは、その周方向他端部が、前記第2の半径方向スリット部に接続することが好ましい。
本発明は叙上の如く、前記第1、第2の固定電極が、それぞれX方向加速度成分検出軸及びY方向加速度成分検出軸によって分割された4つのセグメント状の分割電極片を含んで形成される。
この場合、第1、第2の固定電極において、それぞれ4つの分割電極片のうち、Y方向加速度成分検出軸の一方側に配される2つの分割電極片と、他方側に配される2つの分割電極片とを、X方向の加速度測定の電極として使用することが可能となる。
又第1、第2の固定電極において、それぞれ4つの分割電極片のうち、X方向加速度成分検出軸の一方側に配される2つの分割電極片と、他方側に配される2つの分割電極片とを、Y方向の加速度測定の電極として使用することが可能となる。
又第1の固定電極における4つの分割電極片と、第2の固定電極における4つの分割電極片とを、Z方向の加速度測定の電極として使用することが可能となる。
すなわち、第1、第2の固定電極を、それぞれX方向加速度成分検出軸及びY方向加速度成分検出軸によって4分割することで、各分割電極片を、X方向の加速度測定、Y方向の加速度測定、及びZ方向の加速度測定に兼用させることができる。
従って、図9(B)の従来例で示す如く、4つの電極片を、X方向の加速測定専用の2つの電極片と、Y方向の加速度測定専用の2つの電極片とに区分する場合に比して、電極面積Sを約2倍に増加させることができ、センササイズを維持しながらセンサ感度を高めて検出精度の向上を図ることができる。
以下、本発明の実施の形態について、詳細に説明する。
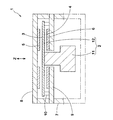
図1に示すように、本実施形態の静電容量型の3軸加速度センサ1は、重錘可撓部材2と、重錘可撓部材2に取り付く第1、第2の変位電極3、4と、この第1、第2の変位電極3、4に向き合う第1、第2の固定電極5、6とを具え、上下方向であるZ方向の加速度、水平方向であるX方向及びY方向の加速度を検出する。
図1に示すように、本実施形態の静電容量型の3軸加速度センサ1は、重錘可撓部材2と、重錘可撓部材2に取り付く第1、第2の変位電極3、4と、この第1、第2の変位電極3、4に向き合う第1、第2の固定電極5、6とを具え、上下方向であるZ方向の加速度、水平方向であるX方向及びY方向の加速度を検出する。
具体的には、本例の3軸加速度センサ1は、センサ筐体7と、このセンサ筐体7に固定される互いに平行な上下の基板8、9とを具える。本例では、下の基板9に、前記重錘可撓部材2がボス部10を介して支持される。なおセンサ筐体7或いは上の基板8に、重錘可撓部材2を支持させることもできる。
前記重錘可撓部材2は、重錘11と、この重錘11が取り付く円盤状の可撓板12とを有する。この可撓板12は、前記上下の基板8、9間に配される。
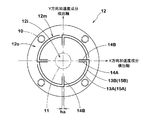
図3に示すように、可撓板12は、X方向加速度成分検出軸とY方向加速度成分検出軸とが交わる原点Oの位置を含む中央側領域12i、可撓板12が固定される外周領域12o、及び前記中央側領域12iと外周領域12oとの間の可撓領域12mを具える。中央側領域12iには、重錘11が取り付く。又外周領域12oは、前記ボス部10を介して、本例では、基板9に固定される。
前記可撓領域12mは、原点Oを円弧中心とした半径方向内外の円弧状スリット13A、13Bと、第1、第2の半径方向スリット部14A、14Bとを具える。内の円弧状スリット13Aは、周方向に4等分された分割スリット15Aから構成され、外の円弧状スリット13Bは、周方向に4等分された分割スリット15Bから構成される。
各前記分割スリット15Aには、その周方向一端部から半径方向内側にのびる第1の半径方向スリット部14Aが連設される。又各前記分割スリット15Bには、その周方向一端部から半径方向内側にのびる第2の半径方向スリット部14Bが連設される。第1、第2の半径方向スリット部14A、14Bは、X方向加速度成分検出軸又はY方向加速度成分検出軸を挟んだ両側で互いに向かい合う。
内の円弧状スリット13Aをなす分割スリット15Aは、その周方向他端部が、前記第2の半径方向スリット部14Bに接続する。このような円弧状スリット13A、13B、及び第1、第2の半径方向スリット部14A、14Bを設けることにより、可撓領域12mは、重錘11に作用する加速度により、自在な向きに変位しうる。
可撓板12のZ方向の一方側(本例では上側)の表面に、第1の変位電極3が配され、又他方側(本例では下側)の表面に、第2の変位電極4が配される。本例では、可撓板12が導電性を有する金属板によって形成され、従って、可撓板12自体が第1、第2の変位電極3、4を構成している。
本例では、上の基板8の下面に、第1の変位電極3に向き合う第1の固定電極5が設けられ、下の基板9の上面に、第2の変位電極4に向き合う第2の固定電極6が設けられる。第1、第2の固定電極5、6は互いに平行であり、又、重力が作用しない基準状態において、変位電極3と固定電極5との間隔、及び変位電極4と固定電極6との間隔は、互いに等しい。
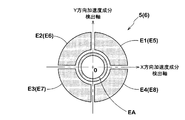
図2(A)、(B)に示すように、第1、第2の固定電極5、6は、それぞれX方向加速度成分検出軸及びY方向加速度成分検出軸により分割された4つのセグメント状の分割電極片Eを含んで形成される。各分割電極片Eは、電気的に独立している。本例では、第1、第2の固定電極5、6が、それぞれ4つの分割電極片Eから形成される場合が示される。各分割電極片Eは、互いに同形であるのが好ましい。
具体的には、第1の固定電極5の分割電極片Eは、X−Y座標系における、第1象限に位置する第1分割電極片E1と、第2象限に位置する第2分割電極片E2と、第3象限に位置する第3分割電極片E3と、第4象限に位置する第4分割電極片E4とから構成される。
又前記第2の固定電極6の分割電極片Eは、X−Y座標系における、第1象限に位置する第5分割電極片E5と、第2象限に位置する第6分割電極片E6と、第3象限に位置する第7分割電極片E7と、第4象限に位置する第8分割電極片E8とから構成される。
これにより、第1の変位電極3と第1分割電極片E1とにより静電容量値C1の静電容量素子P1が形成され、第1の変位電極3と第2分割電極片E2とにより静電容量値C2の静電容量素子P2が形成され、第1の変位電極3と第3分割電極片E3とにより静電容量値C3の静電容量素子P3が形成され、第1の変位電極3と第4分割電極片E1とにより静電容量値C4の静電容量素子P4が形成される。
同様に、第2の変位電極4と第5分割電極片E5とにより静電容量値C5の静電容量素子P5が形成され、第2の変位電極4と第6分割電極片E6とにより静電容量値C6の静電容量素子P6が形成され、第2の変位電極4と第7分割電極片E7とにより静電容量値C7の静電容量素子P7が形成され、第2の変位電極4と第8分割電極片E8とにより、静電容量値C8の静電容量素子P8が形成される。
各分割電極片E1〜E8は、本例では互いに同形であり、又同じ金属材料で構成される。又、X方向加速度成分検出軸又はY方向加速度成分検出軸を挟んで隣り合う第1、第2の半径方向スリット部14A、14B間の間隔ha(図3に示す)は、X方向加速度成分検出軸又はY方向加速度成分検出軸を挟んで隣り合う分割電極片Eの周方向端間の間隔hbより小であるのが好ましい。
このような3軸加速度センサ1では、各分割電極片Eを下記のように組み合わせて、X方向の加速度測定用電極として使用できる。すなわち、固定電極5においては、図4(A)に示すように、4つの分割電極片E1〜E4のうち、Y方向加速度成分検出軸の一方側に配される2つの分割電極片E1、E4の組みR14、及び他方側に配される2つの分割電極片E2、E3の組みR23を、X方向の加速度測定用電極として使用可能となる。同様に、固定電極6においては、図4(B)に示すように、4つの分割電極片E5〜E8のうち、Y方向加速度成分検出軸の一方側に配される2つの分割電極片E5、E8の組みR58、及び他方側に配される2つの分割電極片E6、E7の組みR67を、X方向の加速度測定用電極として使用可能となる。
Y方向の加速度測定用電極として使用する場合、固定電極5においては、図4(C)に示すように、4つの分割電極片E1〜E4のうち、X方向加速度成分検出軸の一方側に配される2つの分割電極片E1、E2の組みR12、及び他方側に配される2つの分割電極片E3、E4の組みR34が、Y方向の加速度測定用電極として使用可能となる。同様に、固定電極6においては、図4(D)に示すように、4つの分割電極片E5〜E8のうち、X方向加速度成分検出軸の一方側に配される2つの分割電極片E5、E6の組みR56、及び他方側に配される2つの分割電極片E7、E8の組みR78が、Y方向の加速度測定用電極として使用可能となる。
図示しないが、Z方向の加速度測定用電極としては、4つの分割電極片E1〜E4の組みR1〜4、及び4つの分割電極片E5〜E8の組みR5〜8が使用可能である。
従って、図9(A)、(B)に示す前述の特許文献1の3軸加速度センサに対して、本発明の3軸加速度センサ1では、各分割電極片Eを以下のように使用できる。
電極片eX1→分割電極片(E1+E4)
電極片eX2→分割電極片(E2+E3)
電極片eX3→分割電極片(E5+E8)
電極片eX4→分割電極片(E6+E7)
電極片eY1→分割電極片(E1+E2)
電極片eY2→分割電極片(E3+E4)
電極片eY3→分割電極片(E5+E6)
電極片eY4→分割電極片(E7+E8)
電極片eZ1→分割電極片(E1+E2+E3+E4)
電極片eZ2→分割電極片(E5+E6+E7+E8)
電極片eX1→分割電極片(E1+E4)
電極片eX2→分割電極片(E2+E3)
電極片eX3→分割電極片(E5+E8)
電極片eX4→分割電極片(E6+E7)
電極片eY1→分割電極片(E1+E2)
電極片eY2→分割電極片(E3+E4)
電極片eY3→分割電極片(E5+E6)
電極片eY4→分割電極片(E7+E8)
電極片eZ1→分割電極片(E1+E2+E3+E4)
電極片eZ2→分割電極片(E5+E6+E7+E8)
すなわち、本発明においては、X方向の加速度測定電極、及びY方向の加速度測定電極として、電極面積を、特許文献1の場合に比して、約2倍に増加させることができ、センササイズを維持しながらセンサ感度を高めて検出精度の向上を図ることができる。又Z方向の加速度測定電極に対しても、電極面積を、特許文献1の場合に比して大幅に増加させることができる。
なお図8に示すように、第1、第2の固定電極5、6として、4つの分割電極片Eの半径方向内側に、Z方向の加速度測定専用の電極EAを設けることもできる。しかし、電極EAを設けず、4つの分割電極片Eのみで第1、第2の固定電極5、6を構成する場合には、分割電極片Eの電極面積を電極EAの分だけ増加しうるため、センサ感度をさらに向上させることができる。
又前記3軸加速度センサ1は、各前記静電容量素子P1〜P8の静電容量値C1〜C8から重錘11に作用した加速度GX、GY、GZを検出する演算部(図示しない)を具える。
前記演算部は、例えば基板8、9に形成される電気回路であって、加速度GX、GY、GZに対応する静電容量値CX、CY、CZの何れか一つを、全ての静電容量値C1、C2、C3、C4、C5、C6、C7、C8に基づいて算出し、加速度GX、GY、GZの何れか一つを検出する。本例では、各静電容量値CX、CY、CZを、それぞれ、全ての静電容量値C1、C2、C3、C4、C5、C6、C7、C8に基づいて算出し、各加速度GX、GY、GZを検出する。算出方法としては特に規定されない。
しかし、本例の如く、各分割電極片E1〜E8が互いに同形、かつ同じ金属材料で構成される場合、次式(1)〜(3)に基づいて算出することができる。
CX=(C1+C4)−(C2+C3)+(C6+C7)−(C5+C8) ---(1)
CY=(C1+C2)−(C3+C4)+(C7+C8)−(C5+C6) ---(2)
CZ=(C1+C4)+(C2+C3)−(C5+C8)−(C6+C7) ---(3)
CX=(C1+C4)−(C2+C3)+(C6+C7)−(C5+C8) ---(1)
CY=(C1+C2)−(C3+C4)+(C7+C8)−(C5+C6) ---(2)
CZ=(C1+C4)+(C2+C3)−(C5+C8)−(C6+C7) ---(3)
上記式(1)〜(3)は、前述の特許文献1の次式(1')〜(3')に相当している。
cX=(c12−c14)−(c22−c24) ---(1')
cY=(c13−c15)−(c23−c25) ---(2')
cZ=(c11)−(c21) ---(3')
cX=(c12−c14)−(c22−c24) ---(1')
cY=(c13−c15)−(c23−c25) ---(2')
cZ=(c11)−(c21) ---(3')
従って、前記3軸加速度センサ1は、特許文献1の利点を発揮しながら、電極面積をさらに増加させることができ、センササイズを維持しながら、センサ感度を高めて検出精度をより向上させることができる。なお特許文献1の利点、及びそのメカニズムは特許文献1に記載の通りであって、本明細書では、その説明を省略する。
次に、演算部の回路構成の一例を図5〜7に示す。図5はX方向の加速度GXの出力、図6はY方向の加速度GYの出力、図7はZ方向の加速度GZの出力を演算する。
例えば図5において、静電容量値C1〜C8は、それぞれC/V変換回路により電圧値V1〜V8に変換され、各差動増幅器20に出力される。各差動増幅器20は、電圧値V1とV2との差の電圧V1−2、電圧値V4とV3との差の電圧V4−3、電圧値V6とV5との差の電圧V6−5、電圧値V7とV8との差の電圧V7−8をそれぞれ加算増幅器21に出力する。各加算増幅器21は、電圧V1−2と電圧V4−3との和の電圧V1−2+4−3、及び電圧V6−5と電圧V7−8との和の電圧V6−5+7−8を加算増幅器22に出力し、これによって静電容量値CXに相当しX方向の加速度GXに対応する電圧値VXが求められる。
なおY方向の加速度出力CY、及びZ方向の加速度出力CZも、X方向の場合と同様、図6、7に示すように、C/V変換回路、差動増幅器20、加算増幅器21を用いて求められる。
以上、本発明の特に好ましい実施形態について詳述したが、本発明は図示の実施形態に限定されることなく、種々の態様に変形して実施しうる。
1 軸加速度センサ
2 重錘可撓部材
3 第1の変位電極
4 第2の変位電極
5 第1の固定電極
6 第2の固定電極
11 重錘
12 可撓板
12i 中央側領域
12m 可撓領域
12o 外周領域
13A、13B 半径方向内外の円弧状スリット
14A 第1の半径方向スリット部
14B 第2の半径方向スリット部
15A、15B 分割スリット
2 重錘可撓部材
3 第1の変位電極
4 第2の変位電極
5 第1の固定電極
6 第2の固定電極
11 重錘
12 可撓板
12i 中央側領域
12m 可撓領域
12o 外周領域
13A、13B 半径方向内外の円弧状スリット
14A 第1の半径方向スリット部
14B 第2の半径方向スリット部
15A、15B 分割スリット
Claims (6)
- XYZ方向の加速度を検出する3軸加速度センサであって、
重錘が取り付けられかつこの重錘に作用する加速度により変位する可撓板を有する重錘可撓部材、
前記可撓板のZ方向の一方側の表面に配される第1の変位電極と、他方側の表面に配される第2の変位電極、
及び前記第1の変位電極に向き合う第1の固定電極と、前記第2の変位電極に向き合いかつ第1の固定電極とは互いに平行に配される第2の固定電極とを具えるとともに、
前記第1、第2の固定電極は、それぞれX方向加速度成分検出軸及びY方向加速度成分検出軸により分割されかつ電気的に独立した4つのセグメント状の分割電極片を含むことを特徴とする静電容量型の3軸加速度センサ。 - 前記第1、第2の固定電極は、それぞれ4つの分割電極片からなることを特徴とする請求項1記載の静電容量型の3軸加速度センサ。
- 各前記分割電極片は、互いに同形であることを特徴とする請求項1又は2記載の静電容量型の3軸加速度センサ。
- 前記第1の固定電極の分割電極片は、X−Y座標系における、第1象限に位置する静電容量値C1の第1分割電極片E1と、第2象限に位置する静電容量値C2の第2分割電極片E2と、第3象限に位置する静電容量値C3の第3分割電極片E3と、第4象限に位置する静電容量値C4の第4分割電極片E4とからなり、
かつ前記第2の固定電極の分割電極片は、X−Y座標系における、第1象限に位置する静電容量値C5の第5分割電極片E5と、第2象限に位置する静電容量値C6の第6分割電極片E6と、第3象限に位置する静電容量値C7の第7分割電極片E7と、第4象限に位置する静電容量値C8の第8分割電極片E8とからなるとともに、
X方向の加速度GXに対応する静電容量値CX、Y方向の加速度GYに対応する静電容量値CY、Z方向の加速度GZに対応する静電容量値CZの何れか一つは、全ての静電容量値C1、C2、C3、C4、C5、C6、C7、C8に基づいて算出し、前記重錘に作用した加速度GX、GY、GZの何れか一つを検出することを特徴とする請求項3記載の静電容量型の3軸加速度センサ。 - 前記静電容量値CX、CY、CZの何れか一つは、次式(1)〜(3)に基づいて算出することを特徴とする請求項4記載の静電容量型の3軸加速度センサ。
CX=(C1+C4)−(C2+C3)+(C6+C7)−(C5+C8) ---(1)
CY=(C1+C2)−(C3+C4)+(C7+C8)−(C5+C6) ---(2)
CZ=(C1+C4)+(C2+C3)−(C5+C8)−(C6+C7) ---(3) - 前記可撓板は、X方向加速度成分検出軸とY方向加速度成分検出軸とが交わる原点位置を含みかつ前記重錘が取り付く中央側領域、前記可撓板が固定される外周領域、及び前記中央側領域と外周領域との間の可撓領域を具え、
該可撓領域は、前記原点を円弧中心とした半径方向内外の円弧状スリットを有し、かつ前記半径方向内外の円弧状スリットは、それぞれ周方向に4等分される分割スリットからなり、
前記半径方向内側の円弧状スリットをなす分割スリットには、その周方向一端部から半径方向内側にのびる第1の半径方向スリット部が配され、
前記半径方向外側の円弧状スリットをなす分割スリットには、その周方向一端部から半径方向内側にのびる第2の半径方向スリット部が配され、
しかも前記第1、第2の半径方向スリット部は、X方向加速度成分検出軸又はY方向加速度成分検出軸を挟んだ両側で互いに向かい合うとともに、
前記半径方向内側の円弧状スリットをなす分割スリットは、その周方向他端部が、前記第2の半径方向スリット部に接続することを特徴とする請求項1〜5の何れかに記載の静電容量型の3軸加速度センサ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016095242A JP2017203683A (ja) | 2016-05-11 | 2016-05-11 | 静電容量型の3軸加速度センサ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016095242A JP2017203683A (ja) | 2016-05-11 | 2016-05-11 | 静電容量型の3軸加速度センサ |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017203683A true JP2017203683A (ja) | 2017-11-16 |
Family
ID=60323201
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016095242A Pending JP2017203683A (ja) | 2016-05-11 | 2016-05-11 | 静電容量型の3軸加速度センサ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2017203683A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2020230270A1 (ja) * | 2019-05-14 | 2021-09-27 | 三菱電機株式会社 | 振動センサ |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05118942A (ja) * | 1991-10-25 | 1993-05-14 | Kazuhiro Okada | 多次元方向に関する力・加速度・磁気の検出装置 |
| JPH09119943A (ja) * | 1995-10-24 | 1997-05-06 | Wako:Kk | 加速度センサ |
| JPH1123610A (ja) * | 1997-07-08 | 1999-01-29 | Omron Corp | 静電容量型多軸加速度検出装置 |
| US5894090A (en) * | 1996-05-31 | 1999-04-13 | California Institute Of Technology | Silicon bulk micromachined, symmetric, degenerate vibratorygyroscope, accelerometer and sensor and method for using the same |
| JPH11133055A (ja) * | 1997-10-24 | 1999-05-21 | Naigai Rubber Kk | 静電容量形3軸加速度センサ |
| JP2004085202A (ja) * | 2002-08-22 | 2004-03-18 | Star Micronics Co Ltd | 静電容量型加速度センサ |
| JP2005326310A (ja) * | 2004-05-14 | 2005-11-24 | Hosiden Corp | 振動センサ |
| JP2006084219A (ja) * | 2004-09-14 | 2006-03-30 | Hosiden Corp | 加速度センサ |
| JP2006126064A (ja) * | 2004-10-29 | 2006-05-18 | Star Micronics Co Ltd | 静電容量型センサの製造方法 |
| JP2006208316A (ja) * | 2005-01-31 | 2006-08-10 | Star Micronics Co Ltd | 静電容量型加速度センサ |
-
2016
- 2016-05-11 JP JP2016095242A patent/JP2017203683A/ja active Pending
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05118942A (ja) * | 1991-10-25 | 1993-05-14 | Kazuhiro Okada | 多次元方向に関する力・加速度・磁気の検出装置 |
| JPH09119943A (ja) * | 1995-10-24 | 1997-05-06 | Wako:Kk | 加速度センサ |
| US5894090A (en) * | 1996-05-31 | 1999-04-13 | California Institute Of Technology | Silicon bulk micromachined, symmetric, degenerate vibratorygyroscope, accelerometer and sensor and method for using the same |
| JPH1123610A (ja) * | 1997-07-08 | 1999-01-29 | Omron Corp | 静電容量型多軸加速度検出装置 |
| JPH11133055A (ja) * | 1997-10-24 | 1999-05-21 | Naigai Rubber Kk | 静電容量形3軸加速度センサ |
| JP2004085202A (ja) * | 2002-08-22 | 2004-03-18 | Star Micronics Co Ltd | 静電容量型加速度センサ |
| JP2005326310A (ja) * | 2004-05-14 | 2005-11-24 | Hosiden Corp | 振動センサ |
| JP2006084219A (ja) * | 2004-09-14 | 2006-03-30 | Hosiden Corp | 加速度センサ |
| JP2006126064A (ja) * | 2004-10-29 | 2006-05-18 | Star Micronics Co Ltd | 静電容量型センサの製造方法 |
| JP2006208316A (ja) * | 2005-01-31 | 2006-08-10 | Star Micronics Co Ltd | 静電容量型加速度センサ |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2020230270A1 (ja) * | 2019-05-14 | 2021-09-27 | 三菱電機株式会社 | 振動センサ |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8333113B2 (en) | Triaxial acceleration sensor | |
| US9010185B2 (en) | Three-dimensional micro-electro-mechanical-system sensor | |
| US8736254B2 (en) | Physical quantity sensor and electronic apparatus | |
| US9958472B2 (en) | Inertial sensor | |
| US9327962B2 (en) | MEMS device and corresponding micromechanical structure with integrated compensation of thermo-mechanical stress | |
| CN106597016A (zh) | 一种电容式mems双轴加速度计 | |
| US20120000287A1 (en) | Microelectromechanical three-axis capacitive accelerometer | |
| JP6583547B2 (ja) | 改良型微小電気機械加速度測定装置 | |
| US8347721B2 (en) | Acceleration sensor | |
| US10913652B2 (en) | Micromechanical z-inertial sensor | |
| US20190100426A1 (en) | Mems sensor with dual pendulous proof masses | |
| US8429971B2 (en) | Multiaxial micromechanical acceleration sensor | |
| WO2013179647A2 (ja) | 物理量センサ | |
| JP2011053020A (ja) | 静電容量型物理量センサ及び角速度センサ | |
| CN206321662U (zh) | 一种mems双轴加速度计 | |
| JP2018531377A6 (ja) | 改良型微小電気機械加速度測定装置 | |
| US20170030741A1 (en) | Micro-electro-mechanical system device with electrical compensation and readout circuit thereof | |
| JP2004294332A (ja) | 半導体力学量センサ | |
| JPWO2015145489A1 (ja) | 加速度センサ、および加速度または振動検出方法 | |
| JP2017203683A (ja) | 静電容量型の3軸加速度センサ | |
| Tavakoli et al. | Designing a new high performance 3-axis MEMS capacitive accelerometer | |
| WO2011161917A1 (ja) | 加速度センサ | |
| US9612254B2 (en) | Microelectromechanical systems devices with improved lateral sensitivity | |
| WO2009090841A1 (ja) | 静電容量型加速度センサ | |
| JP3766190B2 (ja) | 静電容量形3軸加速度センサ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180126 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20181004 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20181016 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20190416 |