JP2017196614A - 流体ネットワークにおける流体流れの生成 - Google Patents
流体ネットワークにおける流体流れの生成 Download PDFInfo
- Publication number
- JP2017196614A JP2017196614A JP2017060822A JP2017060822A JP2017196614A JP 2017196614 A JP2017196614 A JP 2017196614A JP 2017060822 A JP2017060822 A JP 2017060822A JP 2017060822 A JP2017060822 A JP 2017060822A JP 2017196614 A JP2017196614 A JP 2017196614A
- Authority
- JP
- Japan
- Prior art keywords
- fluid
- channel
- duration
- displacement
- microfluidic channel
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 239000012530 fluid Substances 0.000 title claims abstract description 525
- 238000006073 displacement reaction Methods 0.000 claims abstract description 168
- 238000000034 method Methods 0.000 claims abstract description 40
- 239000012528 membrane Substances 0.000 claims description 30
- 238000005452 bending Methods 0.000 claims description 18
- 230000003213 activating effect Effects 0.000 claims 2
- 238000005086 pumping Methods 0.000 description 14
- 230000000694 effects Effects 0.000 description 13
- 230000033001 locomotion Effects 0.000 description 9
- 230000002123 temporal effect Effects 0.000 description 6
- 230000006870 function Effects 0.000 description 5
- 230000005540 biological transmission Effects 0.000 description 4
- 238000010438 heat treatment Methods 0.000 description 4
- 238000004458 analytical method Methods 0.000 description 3
- 230000007246 mechanism Effects 0.000 description 3
- 230000008859 change Effects 0.000 description 2
- 238000007796 conventional method Methods 0.000 description 2
- 238000001514 detection method Methods 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 238000004880 explosion Methods 0.000 description 2
- 238000003475 lamination Methods 0.000 description 2
- 239000007788 liquid Substances 0.000 description 2
- 238000000465 moulding Methods 0.000 description 2
- 238000003752 polymerase chain reaction Methods 0.000 description 2
- 230000001902 propagating effect Effects 0.000 description 2
- 238000004528 spin coating Methods 0.000 description 2
- 239000000126 substance Substances 0.000 description 2
- 238000000018 DNA microarray Methods 0.000 description 1
- 102000004190 Enzymes Human genes 0.000 description 1
- 108090000790 Enzymes Proteins 0.000 description 1
- 241000590419 Polygonia interrogationis Species 0.000 description 1
- 230000002411 adverse Effects 0.000 description 1
- 230000003321 amplification Effects 0.000 description 1
- 239000012472 biological sample Substances 0.000 description 1
- 238000005266 casting Methods 0.000 description 1
- 238000000576 coating method Methods 0.000 description 1
- 238000001816 cooling Methods 0.000 description 1
- 238000003745 diagnosis Methods 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 201000010099 disease Diseases 0.000 description 1
- 208000037265 diseases, disorders, signs and symptoms Diseases 0.000 description 1
- 238000001312 dry etching Methods 0.000 description 1
- 230000007613 environmental effect Effects 0.000 description 1
- 238000005530 etching Methods 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 238000000608 laser ablation Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000004377 microelectronic Methods 0.000 description 1
- 238000003199 nucleic acid amplification method Methods 0.000 description 1
- 150000007523 nucleic acids Chemical class 0.000 description 1
- 102000039446 nucleic acids Human genes 0.000 description 1
- 108020004707 nucleic acids Proteins 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 244000052769 pathogen Species 0.000 description 1
- 230000001717 pathogenic effect Effects 0.000 description 1
- 230000002572 peristaltic effect Effects 0.000 description 1
- 238000000206 photolithography Methods 0.000 description 1
- 229920002120 photoresistant polymer Polymers 0.000 description 1
- 239000002861 polymer material Substances 0.000 description 1
- 230000036316 preload Effects 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 230000001141 propulsive effect Effects 0.000 description 1
- 230000002441 reversible effect Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 238000004544 sputter deposition Methods 0.000 description 1
- 239000003053 toxin Substances 0.000 description 1
- 231100000765 toxin Toxicity 0.000 description 1
- 239000002699 waste material Substances 0.000 description 1
Images













Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/08—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor using a stream of discrete samples flowing along a tube system, e.g. flow injection analysis
- G01N35/085—Flow Injection Analysis
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J2/00—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed
- B41J2/005—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed characterised by bringing liquid or particles selectively into contact with a printing material
- B41J2/01—Ink jet
- B41J2/135—Nozzles
- B41J2/14—Structure thereof only for on-demand ink jet heads
- B41J2/14016—Structure of bubble jet print heads
- B41J2/14032—Structure of the pressure chamber
- B41J2/1404—Geometrical characteristics
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J2/00—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed
- B41J2/005—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed characterised by bringing liquid or particles selectively into contact with a printing material
- B41J2/01—Ink jet
- B41J2/17—Ink jet characterised by ink handling
- B41J2/175—Ink supply systems ; Circuit parts therefor
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B17/00—Pumps characterised by combination with, or adaptation to, specific driving engines or motors
- F04B17/003—Pumps characterised by combination with, or adaptation to, specific driving engines or motors driven by piezoelectric means
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B19/00—Machines or pumps having pertinent characteristics not provided for in, or of interest apart from, groups F04B1/00 - F04B17/00
- F04B19/006—Micropumps
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B43/00—Machines, pumps, or pumping installations having flexible working members
- F04B43/02—Machines, pumps, or pumping installations having flexible working members having plate-like flexible members, e.g. diaphragms
- F04B43/04—Pumps having electric drive
- F04B43/043—Micropumps
- F04B43/046—Micropumps with piezoelectric drive
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B49/00—Control, e.g. of pump delivery, or pump pressure of, or safety measures for, machines, pumps, or pumping installations, not otherwise provided for, or of interest apart from, groups F04B1/00 - F04B47/00
- F04B49/06—Control using electricity
- F04B49/065—Control using electricity and making use of computers
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01K—MEASURING TEMPERATURE; MEASURING QUANTITY OF HEAT; THERMALLY-SENSITIVE ELEMENTS NOT OTHERWISE PROVIDED FOR
- G01K17/00—Measuring quantity of heat
- G01K17/006—Microcalorimeters, e.g. using silicon microstructures
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N33/00—Investigating or analysing materials by specific methods not covered by groups G01N1/00 - G01N31/00
- G01N33/48—Biological material, e.g. blood, urine; Haemocytometers
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/08—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor using a stream of discrete samples flowing along a tube system, e.g. flow injection analysis
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/10—Devices for transferring samples or any liquids to, in, or from, the analysis apparatus, e.g. suction devices, injection devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J2/00—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed
- B41J2/005—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed characterised by bringing liquid or particles selectively into contact with a printing material
- B41J2/01—Ink jet
- B41J2/135—Nozzles
- B41J2/14—Structure thereof only for on-demand ink jet heads
- B41J2002/14467—Multiple feed channels per ink chamber
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J2202/00—Embodiments of or processes related to ink-jet or thermal heads
- B41J2202/01—Embodiments of or processes related to ink-jet heads
- B41J2202/12—Embodiments of or processes related to ink-jet heads with ink circulating through the whole print head
Abstract
Description
上記したように、マイクロ流体デバイスにおいて流体を制御乃至管理する従来の方法は、マイクロメートルのスケールではない外部装置及びポンプ機構を使用する。これらのソリューションには、マイクロ流体システムの応用範囲を制限しうるいくつかの不都合がある。たとえば、マイクロ流体デバイス内に流体を注入して流体の流れを生成するために、外部の注射器及び空気ポンプが使用されることがある。しかしながら、外部の注射器及び空気ポンプは大きくて、取り扱うのも設定するのも難しく、接続の信頼性も低い。これらのタイプのポンプは、マイクロ流体デバイス/チップが適合することができる外部の流体接続の数によって、その多用性の点でも制限を受ける。
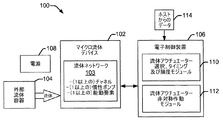
図1は、本開示の1実施形態にしたがう、(本明細書に開示されている)マイクロ流体デバイス、ネットワーク、及び慣性ポンプを組み込むのに適したマイクロ流体システム100を示す。マイクロ流体システム100を、たとえば、分析システム、マイクロエレクトロニクス冷却システム、ポリメラーゼ連鎖反応(PCR)システムなどの核酸増幅システム、または、同じ体積の流体の使用及び/または操作及び/または制御を伴う任意のシステムとすることができる。マイクロ流体システム100は、広範なマイクロ流体応用を可能にするために、典型的には、マイクロ流体チップ(たとえば「ラボオンチップ」)などのマイクロ流体デバイス102を実装している。マイクロ流体デバイス102は、一般的に、流体をネットワーク中を循環させるための慣性ポンプを具備するチャネルを有する1以上の流体ネットワーク103を備える。一般に、マイクロ流体デバイス102の構造及びコンポーネント(構成要素)を、電鋳法、レーザーアブレーション、異方性エッチング、スパッタリング、ドライエッチング、写真平板(フォトリソグラフィー)、キャスティング、成形(モールディング)、スタンピング、機械加工、スピンコーティング、積層法などの従来の集積回路微細加工技術を用いて製造することができる。マイクロ流体システム100は、流体をマイクロ流体デバイス102に供給し及び/または循環させるための外部の流体容器(たとえば液体タンク)104を含むこともできる。マイクロ流体システム100はまた、電子制御装置(電子コントローラ)106、並びに、マイクロ流体デバイス102、該電子制御装置106、及び、システム100の一部とすることができる他の電気的構成要素(電気コンポーネント)に電力を供給するための電源108を備える。
1.マイクロ流体ネットワーク内に正味の流体流れを生成する方法であって、
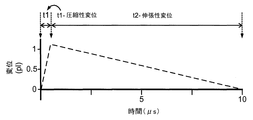
マイクロ流体チャネル内に非対称に組み込まれている流体アクチュエーターによって、圧縮性流体変位と伸張性流体変位を生成するステップであって、前記圧縮性流体変位の持続時間と前記伸張性流体変位の持続時間は時間的に非対称である、ステップ
を含む方法。
2.前記圧縮性流体変位と前記伸張性流体変位の時間的に非対称な持続時間を調節することによって前記ネットワークにおける正味の流体流れの方向を制御するステップをさらに含む、上項1の方法。
3.圧縮性流体変位と伸張性流体変位を生成するステップが、
第1の持続時間を有する圧縮性流体変位を生成するステップと、
前記第1の持続時間とは異なる第2の持続時間を有する伸張性流体変位を生成するステップ
を含むことからなる、上項1の方法。
4.圧縮性流体変位を生成するステップが、前記チャネル内の領域が小さくなるように、機械的膜を前記チャネルの内側に向かって曲げるステップを含み、
伸張性流体変位を生成するステップが、前記チャネル内の領域が大きくなるように、前記機械的膜を前記チャネルの外側に向かって曲げるステップを含むことからなる、上項1の方法。
5.圧縮性流体変位を生成するステップが、抵抗素子で流体を加熱して膨張する蒸気泡を生成するステップを含み、
伸張性流体変位を生成するステップが、前記蒸気泡が崩壊できるようにするステップを含むことからなる、上項1の方法。
6.前記第1の持続時間が前記第2の持続時間よりも長く、前記流体変位によって、前記チャネルを第1の方向に通る流体流れが発生する、上項3の方法。
7.前記第1の持続時間が前記第2の持続時間よりも短く、前記流体変位によって、前記チャネルを第2の方向に通る流体流れが発生する、上項6の方法。
8.圧縮性流体変位と伸張性流体変位を生成するステップが、機械読み取り可能命令を実行するコントローラによって前記流体アクチュエーターを作動させるステップを含むことからなる、上項1の方法。
9.マイクロ流体ネットワークと、
前記ネットワークのチャネル内に非対称な位置に組み込まれて、前記チャネル内に、持続時間が互いに異なる圧縮性流体変位と伸張性流体変位を生成する流体アクチュエーターと、
前記流体アクチュエーターの前記圧縮性流体変位の持続時間と前記伸張性流体変位の持続時間を制御することによって、前記チャネルを通る流体流れの方向を調整するコントローラ
を備えるマイクロ流体システム。
10.前記圧縮性流体変位の持続時間と前記伸張性流体変位の持続時間が非対称である、上項9のマイクロ流体システム。
11.前記流体アクチュエーターの前記圧縮性流体変位と前記伸張性流体変位の非対称な持続時間を調整して、前記チャネル内の流体流れの方向を変えるように前記コントローラを動作させる実行可能命令モジュールをさらに備える、上項10のマイクロ流体システム。
12. マイクロ流体ネットワークにおける流体流れを制御する方法であって、マイクロ流体チャネル内に非対称に配置された流体アクチュエーターによって、前記チャネル内に非対称な流体変位を生成するステップを含む方法。
13.非対称の流体変位を生成するステップが、
第1の時間期間にわたって前記流体アクチュエーターを正方向に湾曲させて、圧縮性流体変位を生成するステップと、
第2の時間期間にわたって前記流体アクチュエーターを負方向に湾曲させて、伸張性流体変位を生成するステップ
を含むことからなる、上項12の方法。
14.前記第1の時間期間が前記第2の時間期間よりも長くなるように制御して、流体が前記チャネルを第1の方向に流れるようにするステップをさらに含む上項13の方法。
15.前記第1の時間期間が前記第2の時間期間よりも短くなるように制御して、流体が前記チャネルを第2の方向に流れるようにするステップをさらに含む上項14の方法。
16.マイクロ流体ネットワーク内に正味の流体流れを生成する方法であって、
流体アクチュエーターによって、該流体アクチュエーターの第1の変位を生成するステップと該流体アクチュエーターの第2の変位を生成するステップ
を含み、
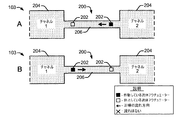
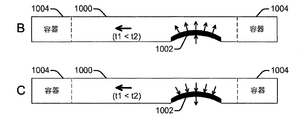
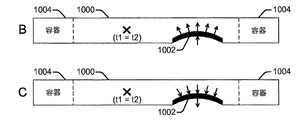
前記流体アクチュエーターは、マイクロ流体チャネル内の位置に組み込まれており、前記流体アクチュエーターの前記位置によって、前記チャネルの第1の端部と前記流体アクチュエーターとの間に前記チャネルの長い側が画定され、かつ、前記チャネルの第2の端部と前記流体アクチュエーターとの間に前記チャネルの短い側が画定され、
前記第1の変位を生成するステップが、第1の持続時間を有する第1の変位を生成する第1のステップを含み、前記第2の変位を生成するステップが、前記第1の持続時間とは異なる第2の持続時間を有する第2の変位を生成する第2のステップを含み、
前記第1の持続時間を有する前記第1の変位によって、前記チャネル内の流体は前記チャネルの前記第1及び第2の端部の両方に向かって押しやられ、前記第2の持続時間を有する前記第2の変位によって、前記チャネル内の流体は前記流体アクチュエーターに向かって引き寄せられる、方法。
17.前記第1の持続時間及び前記第2の持続時間を調節することによって前記ネットワークにおける正味の流体流れの方向を制御するステップをさらに含む、上項16の方法。
18.前記第1の変位を生成するステップが、前記チャネル内の領域が小さくなるように、前記流体アクチュエーターを構成する膜を前記チャネルの内側に向かって曲げるステップを含み、
前記第2の変位を生成するステップが、前記チャネル内の領域が大きくなるように、前記膜を前記チャネルの外側に向かって曲げるステップを含むことからなる、上項16または17の方法。
19.前記第1の変位を生成するステップが、抵抗素子で流体を加熱して膨張する蒸気泡を生成するステップを含み、
前記第2の変位を生成するステップが、前記蒸気泡が崩壊できるようにするステップを含むことからなる、上項16または17の方法。
20.前記第1の変位が有する前記第1の持続時間を前記第2の変位が有する前記第2の持続時間よりも長くすることによって、前記チャネルを第1の方向に通る流体流れが発生する、上項16〜18のいずれかの方法。
21.前記第1の変位が有する前記第1の持続時間を前記第2の変位が有する前記第2の持続時間よりも短くすることによって、前記チャネルを第2の方向に通る流体流れが発生する、上項16、17、18、20のいずれかの方法。
22.前記第1の変位を生成するステップ及び前記第2の変位を生成するステップが、機械読み取り可能命令を実行するコントローラによって前記流体アクチュエーターを作動させるステップを含むことからなる、上項16、17、18、20、21のいずれかの方法。
23.マイクロ流体ネットワークにおける流体流れを制御する方法であって、流体アクチュエーターによって、マイクロ流体チャネル内に前記流体アクチュエーターの非対称な変位を生成するステップを含み、
前記流体アクチュエーターは、前記チャネル内の位置に配置されており、前記流体アクチュエーターの前記位置によって、前記チャネルの第1の端部と前記流体アクチュエーターとの間に前記チャネルの長い側が画定され、かつ、前記チャネルの第2の端部と前記流体アクチュエーターとの間に前記チャネルの短い側が画定され、
前記非対称な変位を生成するステップが、
第1の時間期間にわたる前記流体アクチュエーターの第1の変位を生成することによって、前記チャネル内の流体を前記チャネルの前記第1及び第2の端部の両方に向かって押しやるステップと、
前記第1の時間期間とは異なる第2の時間期間にわたる前記流体アクチュエーターの第2の変位を生成することによって、前記チャネル内の流体を前記流体アクチュエーターに向かって引き寄せるステップ
を含むことからなる、方法。
24.前記第1の時間期間が前記第2の時間期間よりも長くなるように制御して、流体が前記チャネルを第1の方向に流れるようにするステップをさらに含む上項23の方法。
25.前記第1の時間期間が前記第2の時間期間よりも短くなるように制御して、流体が前記チャネルを第2の方向に流れるようにするステップをさらに含む、上項23または24の方法。
Claims (10)
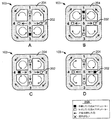
- マイクロ流体ネットワーク内に正味の流体流れを生成する方法であって、
第1の流体アクチュエーターを作動させて、該第1の流体アクチュエーターの第1の持続時間を有する第1の変位を生成するステップと、
前記第1の流体アクチュエーターを作動させて、該第1の流体アクチュエーターの第2の持続時間を有する第2の変位を生成するステップであって、前記第2の持続時間は前記第1の持続時間とは異なる、ステップと、
第2の流体アクチュエーターを作動させて、該第2の流体アクチュエーターの第3の持続時間を有する第3の変位を生成するステップと、
前記第2の流体アクチュエーターを作動させて、該第2の流体アクチュエーターの第4の持続時間を有する第4の変位を生成するステップであって、前記第4の持続時間は前記第3の持続時間とは異なる、ステップ
を含み、
前記第1の流体アクチュエーターは、マイクロ流体チャネルの第1の端部と前記第1の流体アクチュエーターとの間に前記マイクロ流体チャネルの長い側が画定され、かつ、前記マイクロ流体チャネルの第2の端部と前記第1の流体アクチュエーターとの間に前記マイクロ流体チャネルの短い側が画定されるように、前記マイクロ流体チャネル内の第1の所定の位置に組み込まれており、
前記第2の流体アクチュエーターは、前記マイクロ流体チャネルの前記第1の端部と前記第2の流体アクチュエーターとの間に前記マイクロ流体チャネルの短い側が画定され、かつ、前記マイクロ流体チャネルの前記第2の端部と前記第2の流体アクチュエーターとの間に前記マイクロ流体チャネルの長い側が画定されるように、前記マイクロ流体チャネル内の第2の所定の位置に組み込まれており、
前記第1の持続時間を有する前記第1の変位は、前記マイクロ流体チャネル内の流体を前記マイクロ流体チャネルの前記第1及び第2の端部の両方に向かって押しやるように作用し、前記第2の持続時間を有する前記第2の変位は、前記マイクロ流体チャネル内の流体を前記第1の流体アクチュエーターに向かって引き寄せるように作用し、
前記第3の持続時間を有する前記第3の変位は、前記マイクロ流体チャネル内の流体を前記マイクロ流体チャネルの前記第1及び第2の端部の両方に向かって押しやるように作用し、前記第4の持続時間を有する前記第4の変位は、前記マイクロ流体チャネル内の流体を前記第2の流体アクチュエーターに向かって引き寄せるように作用することからなる、方法。 - 前記第2の流体アクチュエーターが作動していないときに、前記第1の流体アクチュエーターの前記第1及び第2の変位によって前記マイクロ流体ネットワークにおける正味の流体流れの方向を制御するために、前記第1の持続時間及び前記第2の持続時間を調節する第1の調節ステップをさらに含む、請求項1の方法。
- 前記第1の調節ステップは、前記マイクロ流体チャネルの前記第2の端部から前記第1の端部に向かう方向に、前記マイクロ流体チャネルを通る流体流れが発生するように、前記第1の持続時間を前記第2の持続時間よりも短くするステップを含む、請求項2の方法。
- 前記第1の調節ステップは、前記マイクロ流体チャネルの前記第1の端部から前記第2の端部に向かう方向に、前記マイクロ流体チャネルを通る流体流れが発生するように、前記第1の持続時間を前記第2の持続時間よりも長くするステップを含む、請求項2または3の方法。
- 前記第1の流体アクチュエーターが作動していないときに、前記第2の流体アクチュエーターの前記第3及び第4の変位によって前記マイクロ流体ネットワークにおける正味の流体流れの方向を制御するために、前記第3の持続時間及び前記第4の持続時間を調節する第2の調節ステップをさらに含む、請求項1〜4のいずれかの方法。
- 前記第2の調節ステップは、前記マイクロ流体チャネルの前記第1の端部から前記第2の端部に向かう方向に、前記マイクロ流体チャネルを通る流体流れが発生するように、前記第3の持続時間を前記第4の持続時間よりも短くするステップを含む、請求項5の方法。
- 前記第2の調節ステップは、前記マイクロ流体チャネルの前記第2の端部から前記第1の端部に向かう方向に、前記マイクロ流体チャネルを通る流体流れが発生するように、前記第3の持続時間を前記第4の持続時間よりも長くするステップを含む、請求項5または6の方法。
- 前記第1の変位を生成するステップが、前記マイクロ流体チャネル内の領域が小さくなるように、前記第1の流体アクチュエーターを構成する第1の膜を前記マイクロ流体チャネルの内側に向かって曲げるステップを含み、
前記第2の変位を生成するステップが、前記マイクロ流体チャネル内の領域が大きくなるように、前記第1の膜を前記マイクロ流体チャネルの外側に向かって曲げるステップを含むことからなる、請求項1〜7のいずれかの方法。 - 前記第3の変位を生成するステップが、前記マイクロ流体チャネル内の領域が小さくなるように、前記第2の流体アクチュエーターを構成する第2の膜を前記マイクロ流体チャネルの内側に向かって曲げるステップを含み、
前記第4の変位を生成するステップが、前記マイクロ流体チャネル内の領域が大きくなるように、前記第2の膜を前記マイクロ流体チャネルの外側に向かって曲げるステップを含むことからなる、請求項1〜8のいずれかの方法。 - 前記第1の変位を生成するステップ及び前記第2の変位を生成するステップが、機械読み取り可能命令を実行するコントローラによって前記第1の流体アクチュエーターを作動させるステップを含み、
前記第3の変位を生成するステップ及び前記第4の変位を生成するステップが、前記コントローラによって前記第2の流体アクチュエーターを作動させるステップを含むことからなる、請求項1〜9のいずれかの方法。
Applications Claiming Priority (14)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| USPCT/US2010/035697 | 2010-05-21 | ||
| PCT/US2010/035697 WO2011146069A1 (en) | 2010-05-21 | 2010-05-21 | Fluid ejection device including recirculation system |
| US12/833,984 US8540355B2 (en) | 2010-07-11 | 2010-07-11 | Fluid ejection device with circulation pump |
| US12/833,984 | 2010-07-11 | ||
| PCT/US2010/043480 WO2012015397A1 (en) | 2010-07-28 | 2010-07-28 | Fluid ejection assembly with circulation pump |
| USPCT/US2010/043480 | 2010-07-28 | ||
| PCT/US2010/054458 WO2012008978A1 (en) | 2010-07-11 | 2010-10-28 | Fluid ejection assembly with circulation pump |
| USPCT/US2010/054458 | 2010-10-28 | ||
| USPCT/US2010/054412 | 2010-10-28 | ||
| PCT/US2010/054412 WO2012057758A1 (en) | 2010-10-28 | 2010-10-28 | Fluid ejection assembly with circulation pump |
| PCT/US2011/021168 WO2011146145A1 (en) | 2010-05-21 | 2011-01-13 | Microfluidic systems and networks |
| USPCT/US2011/021168 | 2011-01-13 | ||
| PCT/US2011/023173 WO2011146149A1 (en) | 2010-05-21 | 2011-01-31 | Fluid ejection device with circulation pump |
| USPCT/US2011/023173 | 2011-01-31 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015111176A Division JP6121480B2 (ja) | 2010-05-21 | 2015-06-01 | 流体ネットワークにおける流体流れの生成 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017196614A true JP2017196614A (ja) | 2017-11-02 |
| JP6445608B2 JP6445608B2 (ja) | 2018-12-26 |
Family
ID=54696590
Family Applications (4)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013512613A Expired - Fee Related JP5777706B2 (ja) | 2010-05-21 | 2011-01-31 | 循環ポンプを具備する流体噴射装置 |
| JP2013511157A Expired - Fee Related JP5758484B2 (ja) | 2010-05-21 | 2011-02-15 | 流体ネットワークにおける流体流れの生成 |
| JP2015111176A Expired - Fee Related JP6121480B2 (ja) | 2010-05-21 | 2015-06-01 | 流体ネットワークにおける流体流れの生成 |
| JP2017060822A Expired - Fee Related JP6445608B2 (ja) | 2010-05-21 | 2017-03-27 | 流体ネットワークにおける流体流れの生成 |
Family Applications Before (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013512613A Expired - Fee Related JP5777706B2 (ja) | 2010-05-21 | 2011-01-31 | 循環ポンプを具備する流体噴射装置 |
| JP2013511157A Expired - Fee Related JP5758484B2 (ja) | 2010-05-21 | 2011-02-15 | 流体ネットワークにおける流体流れの生成 |
| JP2015111176A Expired - Fee Related JP6121480B2 (ja) | 2010-05-21 | 2015-06-01 | 流体ネットワークにおける流体流れの生成 |
Country Status (6)
| Country | Link |
|---|---|
| EP (1) | EP2572206B1 (ja) |
| JP (4) | JP5777706B2 (ja) |
| KR (1) | KR101776358B1 (ja) |
| CN (2) | CN102985261B (ja) |
| BR (1) | BR112012029583B1 (ja) |
| WO (2) | WO2011146149A1 (ja) |
Families Citing this family (43)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2011146069A1 (en) | 2010-05-21 | 2011-11-24 | Hewlett-Packard Development Company, L.P. | Fluid ejection device including recirculation system |
| US9963739B2 (en) | 2010-05-21 | 2018-05-08 | Hewlett-Packard Development Company, L.P. | Polymerase chain reaction systems |
| PL3284598T3 (pl) | 2011-08-26 | 2019-07-31 | Ceraloc Innovation Ab | Powłoka panelowa |
| WO2013130039A1 (en) * | 2012-02-28 | 2013-09-06 | Hewlett-Packard Development Company, L.P. | Fluid ejection device with aceo pump |
| US10369837B2 (en) | 2012-04-30 | 2019-08-06 | Valinge Innovation Ab | Method for forming a decorative design on an element of a wood-based material |
| WO2014007814A1 (en) | 2012-07-03 | 2014-01-09 | Hewlett-Packard Development Company, L.P. | Fluid ejection apparatus |
| CN104641240B (zh) * | 2012-09-24 | 2018-01-02 | 惠普发展公司,有限责任合伙企业 | 微流体混合装置 |
| US9409382B2 (en) | 2012-11-28 | 2016-08-09 | Valinge Innovation Ab | Method of producing a building panel |
| BR112015027225B1 (pt) | 2013-04-30 | 2021-11-03 | Hewlett-Packard Development Company, L.P. | Dispositivo sensor microfluídico |
| EP3061831A4 (en) | 2013-10-21 | 2017-04-19 | KIM, Sung-Chun | Method and apparatus for analyzing biomolecules by using oligonucleotide |
| PL3683055T3 (pl) | 2013-10-23 | 2022-01-31 | Ceraloc Innovation Ab | Panel podłogowy |
| EP3096961B1 (en) | 2014-01-24 | 2022-03-02 | Ceraloc Innovation AB | Digital print with water-based ink on panel surfaces |
| CA2935707C (en) * | 2014-01-29 | 2018-10-30 | Hewlett-Packard Development Company, L.P. | Microfluidic valve |
| EP3099499A4 (en) | 2014-01-31 | 2017-10-11 | Ceraloc Innovation AB | A method of printing a digital image on a substrate attached to a panel and a water-based ink for digital printing on a substrate |
| AU2014391652B2 (en) * | 2014-04-25 | 2018-02-22 | Hewlett-Packard Development Company, L.P. | Diagnostic cassette |
| EP3180415B1 (en) * | 2014-08-15 | 2020-07-08 | Hewlett-Packard Development Company, L.P. | Microfluidic valve |
| EP3212409B1 (en) | 2014-10-29 | 2020-08-12 | Hewlett-Packard Development Company, L.P. | Fluid ejection device |
| BR112017008530B1 (pt) * | 2014-10-31 | 2022-10-18 | Hewlett-Packard Development Company, L.P | Método para operar um dispositivo de ejeção de fluido e dispositivo de ejeção de fluido |
| US10875018B2 (en) | 2015-01-30 | 2020-12-29 | Hewlett-Packard Development Company, L.P. | Fluid testing chip and cassette |
| WO2016122560A1 (en) * | 2015-01-30 | 2016-08-04 | Hewlett-Packard Development Company, L.P. | Vented microfluidic reservoirs |
| US11345162B2 (en) | 2015-07-14 | 2022-05-31 | Hewlett-Packard Development Company, L.P. | Fluid recirculation channels |
| WO2017074324A1 (en) | 2015-10-27 | 2017-05-04 | Hewlett-Packard Development Company, L.P. | Fluid ejection device |
| EP3433105A4 (en) | 2016-03-24 | 2019-11-13 | Välinge Innovation AB | METHOD FOR FORMING A DECOR ON A SUBSTRATE |
| WO2017180120A1 (en) * | 2016-04-14 | 2017-10-19 | Hewlett-Packard Development Company, L.P. | Microfluidic device with capillary chamber |
| WO2017188993A1 (en) * | 2016-04-29 | 2017-11-02 | Hewlett-Packard Development Company, L.P. | Selectively firing a fluid circulation element |
| US11110704B2 (en) | 2016-04-29 | 2021-09-07 | Hewlett-Packard Development Company, L.P. | Selectively firing a fluid circulation element |
| CN109153264B (zh) * | 2016-07-22 | 2020-07-03 | 惠普发展公司,有限责任合伙企业 | 油墨泵送 |
| JP6818775B2 (ja) | 2016-10-03 | 2021-01-20 | ヒューレット−パッカード デベロップメント カンパニー エル.ピー.Hewlett‐Packard Development Company, L.P. | ノズルの再循環の制御 |
| EP3468802B1 (en) * | 2016-11-01 | 2021-06-02 | Hewlett-Packard Development Company, L.P. | Fluid ejection device including fluid output channel |
| CN113022137B (zh) | 2017-03-15 | 2022-08-23 | 惠普发展公司,有限责任合伙企业 | 流体喷射管芯 |
| CN110072701B (zh) * | 2017-03-15 | 2021-05-25 | 惠普发展公司,有限责任合伙企业 | 流体喷射模具 |
| US11686327B2 (en) | 2017-04-07 | 2023-06-27 | Hewlett-Packard Development Company, L.P. | Inertial pumps |
| WO2018208276A1 (en) | 2017-05-08 | 2018-11-15 | Hewlett-Packard Development Company, L.P. | Fluid ejection die fluid recirculation |
| JP7057071B2 (ja) | 2017-06-29 | 2022-04-19 | キヤノン株式会社 | 液体吐出モジュール |
| WO2019013791A1 (en) * | 2017-07-13 | 2019-01-17 | Hewlett-Packard Development Company, L.P. | FLUID ACTUATOR CONTROL |
| EP3609712B1 (en) | 2017-07-31 | 2023-11-29 | Hewlett-Packard Development Company, L.P. | Fluidic ejection devices with enclosed cross-channels |
| US11059291B2 (en) | 2017-07-31 | 2021-07-13 | Hewlett-Packard Development Company, L.P. | Fluidic ejection dies with enclosed cross-channels |
| WO2019117846A1 (en) * | 2017-12-11 | 2019-06-20 | Hewlett-Packard Development Company, L.P. | Servicing based on impedance values |
| JP7134752B2 (ja) * | 2018-07-06 | 2022-09-12 | キヤノン株式会社 | 液体吐出ヘッド |
| JP6615303B2 (ja) * | 2018-11-09 | 2019-12-04 | ヒューレット−パッカード デベロップメント カンパニー エル.ピー. | 流体噴射装置 |
| JP7358153B2 (ja) | 2018-12-28 | 2023-10-10 | キヤノン株式会社 | 液体吐出モジュール |
| JP6731092B2 (ja) * | 2019-04-18 | 2020-07-29 | ヒューレット−パッカード デベロップメント カンパニー エル.ピー.Hewlett‐Packard Development Company, L.P. | 流体再循環チャネル |
| WO2021112866A1 (en) * | 2019-12-06 | 2021-06-10 | Hewlett-Packard Development Company, L.P. | Recirculation fluid ejection device |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0568902A2 (en) * | 1992-05-02 | 1993-11-10 | Westonbridge International Limited | Micropump avoiding microcavitation |
| JP2001322099A (ja) * | 2000-05-16 | 2001-11-20 | Minolta Co Ltd | マイクロポンプ |
| JP2003286940A (ja) * | 2002-03-27 | 2003-10-10 | Minolta Co Ltd | 流体輸送システム |
| JP2004169706A (ja) * | 2004-02-02 | 2004-06-17 | Konica Minolta Holdings Inc | 流体輸送システム |
| JP2004190614A (ja) * | 2002-12-13 | 2004-07-08 | Minolta Co Ltd | 合流装置における液体の圧送方法および合流装置 |
| JP2007224844A (ja) * | 2006-02-24 | 2007-09-06 | Konica Minolta Medical & Graphic Inc | マイクロポンプによる送液方法および送液システム |
| JP2009074463A (ja) * | 2007-09-21 | 2009-04-09 | Konica Minolta Medical & Graphic Inc | マイクロポンプの制御方法、マイクロポンプの駆動回路 |
Family Cites Families (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3328300B2 (ja) * | 1991-07-18 | 2002-09-24 | アイシン精機株式会社 | 流体制御装置 |
| WO1995034427A1 (fr) * | 1994-06-15 | 1995-12-21 | Citizen Watch Co., Ltd. | Methode permettant de commander une tete a jet d'encre |
| US5818485A (en) * | 1996-11-22 | 1998-10-06 | Xerox Corporation | Thermal ink jet printing system with continuous ink circulation through a printhead |
| JP2004249741A (ja) * | 1998-01-22 | 2004-09-09 | Matsushita Electric Ind Co Ltd | インキジェット装置 |
| US6351879B1 (en) * | 1998-08-31 | 2002-03-05 | Eastman Kodak Company | Method of making a printing apparatus |
| US6360775B1 (en) * | 1998-12-23 | 2002-03-26 | Agilent Technologies, Inc. | Capillary fluid switch with asymmetric bubble chamber |
| US6283718B1 (en) * | 1999-01-28 | 2001-09-04 | John Hopkins University | Bubble based micropump |
| US6244694B1 (en) * | 1999-08-03 | 2001-06-12 | Hewlett-Packard Company | Method and apparatus for dampening vibration in the ink in computer controlled printers |
| JP2001205810A (ja) * | 2000-01-28 | 2001-07-31 | Kyocera Corp | インクジェットヘッド |
| US6730206B2 (en) * | 2000-03-17 | 2004-05-04 | Aclara Biosciences, Inc. | Microfluidic device and system with improved sample handling |
| US6629820B2 (en) * | 2001-06-26 | 2003-10-07 | Micralyne Inc. | Microfluidic flow control device |
| US6655924B2 (en) * | 2001-11-07 | 2003-12-02 | Intel Corporation | Peristaltic bubble pump |
| US7094040B2 (en) * | 2002-03-27 | 2006-08-22 | Minolta Co., Ltd. | Fluid transferring system and micropump suitable therefor |
| US7455770B2 (en) * | 2002-09-09 | 2008-11-25 | Cytonome, Inc. | Implementation of microfluidic components in a microfluidic system |
| JP3725109B2 (ja) * | 2002-09-19 | 2005-12-07 | 財団法人生産技術研究奨励会 | マイクロ流体デバイス |
| CN1898016A (zh) * | 2003-11-21 | 2007-01-17 | 株式会社荏原制作所 | 采用液体的微芯片装置 |
| JP3969404B2 (ja) * | 2004-06-16 | 2007-09-05 | コニカミノルタホールディングス株式会社 | 燃料電池装置 |
| US7966898B2 (en) * | 2006-07-28 | 2011-06-28 | California Institute Of Technology | Polymer NEMS for cell physiology and microfabricated cell positioning system for micro-biocalorimeter |
| KR101306005B1 (ko) * | 2006-09-29 | 2013-09-12 | 삼성전자주식회사 | 잉크순환시스템과 잉크젯 기록장치 및 잉크 순환방법 |
| US20090007969A1 (en) * | 2007-07-05 | 2009-01-08 | 3M Innovative Properties Company | Microfluidic actuation structures |
-
2011
- 2011-01-31 WO PCT/US2011/023173 patent/WO2011146149A1/en active Application Filing
- 2011-01-31 CN CN201180035690.9A patent/CN102985261B/zh not_active Expired - Fee Related
- 2011-01-31 JP JP2013512613A patent/JP5777706B2/ja not_active Expired - Fee Related
- 2011-02-15 CN CN201180035606.3A patent/CN102985831B/zh not_active Expired - Fee Related
- 2011-02-15 BR BR112012029583-7A patent/BR112012029583B1/pt not_active IP Right Cessation
- 2011-02-15 WO PCT/US2011/024830 patent/WO2011146156A2/en active Application Filing
- 2011-02-15 JP JP2013511157A patent/JP5758484B2/ja not_active Expired - Fee Related
- 2011-02-15 EP EP11783890.4A patent/EP2572206B1/en active Active
- 2011-02-15 KR KR1020127033352A patent/KR101776358B1/ko active IP Right Grant
-
2015
- 2015-06-01 JP JP2015111176A patent/JP6121480B2/ja not_active Expired - Fee Related
-
2017
- 2017-03-27 JP JP2017060822A patent/JP6445608B2/ja not_active Expired - Fee Related
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0568902A2 (en) * | 1992-05-02 | 1993-11-10 | Westonbridge International Limited | Micropump avoiding microcavitation |
| JP2001322099A (ja) * | 2000-05-16 | 2001-11-20 | Minolta Co Ltd | マイクロポンプ |
| JP2003286940A (ja) * | 2002-03-27 | 2003-10-10 | Minolta Co Ltd | 流体輸送システム |
| JP2004190614A (ja) * | 2002-12-13 | 2004-07-08 | Minolta Co Ltd | 合流装置における液体の圧送方法および合流装置 |
| JP2004169706A (ja) * | 2004-02-02 | 2004-06-17 | Konica Minolta Holdings Inc | 流体輸送システム |
| JP2007224844A (ja) * | 2006-02-24 | 2007-09-06 | Konica Minolta Medical & Graphic Inc | マイクロポンプによる送液方法および送液システム |
| JP2009074463A (ja) * | 2007-09-21 | 2009-04-09 | Konica Minolta Medical & Graphic Inc | マイクロポンプの制御方法、マイクロポンプの駆動回路 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6121480B2 (ja) | 2017-04-26 |
| CN102985261B (zh) | 2016-02-03 |
| JP5758484B2 (ja) | 2015-08-05 |
| JP2015211965A (ja) | 2015-11-26 |
| WO2011146156A3 (en) | 2012-03-08 |
| WO2011146149A1 (en) | 2011-11-24 |
| BR112012029583A2 (pt) | 2016-08-02 |
| CN102985831A (zh) | 2013-03-20 |
| EP2572206B1 (en) | 2020-04-29 |
| KR20130118222A (ko) | 2013-10-29 |
| BR112012029583B1 (pt) | 2020-03-10 |
| JP6445608B2 (ja) | 2018-12-26 |
| EP2572206A4 (en) | 2018-04-11 |
| KR101776358B1 (ko) | 2017-09-19 |
| WO2011146156A2 (en) | 2011-11-24 |
| EP2572206A2 (en) | 2013-03-27 |
| CN102985261A (zh) | 2013-03-20 |
| CN102985831B (zh) | 2016-01-20 |
| JP5777706B2 (ja) | 2015-09-09 |
| JP2013526441A (ja) | 2013-06-24 |
| JP2013533102A (ja) | 2013-08-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6445608B2 (ja) | 流体ネットワークにおける流体流れの生成 | |
| JP5756852B2 (ja) | マイクロ流体システム及びネットワーク | |
| US9395050B2 (en) | Microfluidic systems and networks | |
| US10415086B2 (en) | Polymerase chain reaction systems | |
| Au et al. | Microvalves and micropumps for BioMEMS | |
| US11278891B2 (en) | Fluidic channels for microfluidic devices | |
| US10132303B2 (en) | Generating fluid flow in a fluidic network | |
| JP2008535669A (ja) | アクチュエータ素子をベースとした微小流体システム | |
| BRPI0715138A2 (pt) | sistema micro-fluÍdico, mÉtodos para fabricar um sistema micro-fluÍdico e para controlar um fluxo de fluido atravÉs de um micro-canal de um sistema micro-fluÍdico, e, uso do sistema micro-fluÍdico | |
| TWI659211B (zh) | 微流體裝置 | |
| Tang et al. | Manipulating fluid with vibrating 3D-printed paddles for applications in micropump | |
| Cheng et al. | A capillary system with 1× 4 microflow switches via a micronozzle–diffuser pump and hydrophobic-patch design for continuous liquid handling | |
| Jiao et al. | Innovative Micro Gas Pumping Via Liquid Dielectrophoresis With Zero-Dead Volume and Leak-tight Features | |
| Goh | Effects of wall compliance on pulsatile flow attenuation in microchannels | |
| Cheng et al. | A capillary system with thermal-bubble-actuated 1/spl times/N micro flow switch via time-sequence power control for continuous liquid handling | |
| Hermosilla | A microgripper for single cell manipulation | |
| Desai | Dr. M. Packirisamy Ph. D., P. Eng. |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180314 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180410 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180702 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20181127 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20181129 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6445608 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |