JP2017193239A - 車載システム - Google Patents
車載システム Download PDFInfo
- Publication number
- JP2017193239A JP2017193239A JP2016084323A JP2016084323A JP2017193239A JP 2017193239 A JP2017193239 A JP 2017193239A JP 2016084323 A JP2016084323 A JP 2016084323A JP 2016084323 A JP2016084323 A JP 2016084323A JP 2017193239 A JP2017193239 A JP 2017193239A
- Authority
- JP
- Japan
- Prior art keywords
- exposure time
- vehicle
- light
- exposure
- luminous intensity
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 230000004313 glare Effects 0.000 abstract description 7
- 230000002093 peripheral effect Effects 0.000 abstract 3
- 238000010586 diagram Methods 0.000 description 36
- 238000000034 method Methods 0.000 description 9
- 238000003384 imaging method Methods 0.000 description 8
- 230000035945 sensitivity Effects 0.000 description 7
- 230000007423 decrease Effects 0.000 description 4
- 230000000694 effects Effects 0.000 description 3
- 230000000630 rising effect Effects 0.000 description 3
- 230000001360 synchronised effect Effects 0.000 description 3
- 230000000052 comparative effect Effects 0.000 description 2
- 230000017525 heat dissipation Effects 0.000 description 2
- 230000001678 irradiating effect Effects 0.000 description 2
- 230000002441 reversible effect Effects 0.000 description 2
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000009792 diffusion process Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 230000002123 temporal effect Effects 0.000 description 1
Images









Abstract
【課題】グレアを低減しつつ歩行者等をより良好に撮影する車載システムを提供する。【解決手段】自車両の周辺空間を撮影する車載カメラ、周辺空間に対して光を照射する車両用灯具、車両用灯具の点灯状態を制御する制御装置を含む。車載カメラは、露光時間と非露光時間を有する単位露光サイクルを繰り返して露光時間に周辺空間を撮影する。制御装置は、車両用灯具により、露光時間と非露光時間の各々で複数のパルス光を照射されるように車両用灯具の点灯状態を制御する。露光時間における複数のパルス光の光度の平均的な大きさが相対的に高く、非露光時間における複数のパルス光の光度の平均的な大きさが相対的に低く設定されている。【選択図】図4
Description
本発明は、夜間など周辺が暗い状況において車両の前方に存在する歩行者等を良好に撮影するための光制御技術に関する。
従来から、車載カメラを用いて、自車両の前方に存在する先行車両や対向車両(以下、まとめて「前方車両」という。)、あるいは歩行者や障害物等を撮影する撮像システムが用いられている。この撮像システムで撮影される画像を用いて前方車両や歩行者等を検出することにより、例えば、前方車両や歩行者等の存在する位置に応じて自車両の前照灯による光照射範囲を可変に設定する配光制御などを実現できる。
上記のような撮像システムに用いられる車載カメラは、外部からの入射光量に応じて露光感度を自動的に調整する機能(オートゲイン機能)を備えている場合が多い。この場合に、夜間など周辺が暗い状況で車載カメラの撮像範囲内に前方車両が存在すると、この前方車両の前照灯または尾灯から発せられる光が強いので車載カメラの露光感度が低く調整され、その結果、歩行者等の非発光体を良好に撮影できなくなる。これは、露光感度が低下することにより、歩行者等の非発光体に対する露光時間が不十分となるからである。
このような不都合に関して、例えば特開2011−84237号公報(特許文献1)には、可視光カメラの間歇的な撮影時(すなわちシャッター動作時)ごとに発光ダイオードをパルス発光させるようにすることで、対向車両等への眩惑光の発生を防止し、かつ歩行者等に光が照射されるようにして歩行者等を撮影できるようにする技術が開示されている。
しかし、特許文献1に開示される技術は、シャッター動作時における露光時間以下の発光時間を設定した1つのパルス光を照射するものであり、具体例としては露光時間S1と発光時間T1がほぼ等しく設定されるものである(特許文献1の図3等参照)。このため、可視光カメラの露光時間の長さによっては前方車両の搭乗者や歩行者等に対して多少のグレア(眩しさ)を与えてしまう場合が考えられる。また、特許文献1の図3等に開示の具体例のように、発光時間よりも非発光時間が非常に長い場合には、パルス発光によるフリッカー(ちらつき感)を与えてしまう場合が考えられる。
本発明に係る具体的態様は、歩行者等に対するグレアを低減しつつ歩行者等をより良好に撮影できるようにする技術を提供することを目的の1つとする。
本発明に係る一態様の車載システムは、(a)自車両の周辺空間を撮影する車載カメラと、(b)前記周辺空間に対して光を照射する車両用灯具と、(c)前記車両用灯具の点灯状態を制御する制御装置と、を含み、(d)前記車載カメラは、露光時間と非露光時間を有する単位露光サイクルを繰り返して当該露光時間に前記周辺空間を撮影するものであり、(e)前記制御装置は、前記車両用灯具により、前記露光時間と前記非露光時間の各々で複数のパルス光を照射されるように当該車両用灯具の点灯状態を制御するものであり、(f)前記露光時間における前記複数のパルス光の光度の平均的な大きさが相対的に高く、前記非露光時間における前記複数のパルス光の光度の平均的な大きさが相対的に低く設定されている、車載システムである。
上記構成によれば、露光時間と非露光時間の各々において複数のパルス光によって車載カメラの撮影方向へ光が照射されるので、歩行者等に対するグレアを低減しつつ歩行者等をより良好に撮影できる。特に、複数のパルス光を用いることから、各パルス光の照射時間がより短くなる(すなわち周波数としては高くなる)ので、歩行者等に対して与えるグレアの程度が緩和され、かつ露光時間と非露光時間の各々において複数のパルス光を用いることから運転者等に与えるフリッカーも低減される。
図1は、本発明の車載システムを適用した一実施形態の車両用前照灯システムの構成を示す図である。この車両用前照灯システムは、車載カメラ10、制御装置20、前照灯ユニット(車両用灯具)30を含んで構成されている。
車載カメラ10は、例えば自車両のフロントガラス内側上部に設置され、自車両の前方空間を撮影し、画像を生成するものであり、撮影レンズ11と、この撮影レンズ11により映し出される像を取り込む撮像素子12と、撮像素子12を制御して画像を生成するカメラ制御回路13と、を含んで構成されている。本実施形態の車載カメラ10は、撮像素子12に入射する光の強度に応じて撮影時の感度を自動的に調整するオートゲイン機能を有している。
制御装置20は、車載カメラ10、前照灯ユニット30の点灯制御回路32のそれぞれと接続されており、車両用前照灯システムの動作を制御する。具体的には、制御装置20は、車載カメラ10から画像を取得して表示装置(図示略)に表示させることや、車載カメラ10のシャッター動作に対応して前照灯ユニット30による光照射状態を制御するための信号を点灯制御回路32へ供給することなどを行う。
前照灯ユニット30は、LEDモジュール31、点灯制御回路32、リフレクタ33、シェード34、投影レンズ35、灯体ハウジング36、アウターレンズ37などを含んで構成されている。
LEDモジュール31は、複数のLED(発光素子)を備えており、点灯制御回路32によって制御され、各LEDを個別に点消灯させることができるものである。
点灯制御回路32は、制御装置20からの制御信号に基づいてLEDモジュール31へ駆動電力を供給し、LEDモジュール31の点灯制御を行う。
リフレクタ33は、1次焦点に対応して配置されたLEDモジュール31から出射する光を反射し、2次焦点に集光する。
シェード34は、リフレクタ33の2次焦点に対応して配置されており、LEDモジュール31から出射してリフレクタ33によって集光された光の一部を遮る。
投影レンズ35は、その焦点をリフレクタ33の2次焦点に対応づけて配置されており、2次焦点に集光された光を自車両の前方へ投影する。
灯体ハウジング36は、LEDモジュール31、点灯制御回路32、リフレクタ33、シェード34、投影レンズ35などを収容する。
アウターレンズ37は、灯体ハウジング36に取り付けられており、投影レンズ35によって光が投影される方向に配置されている。
図2(A)は、前照灯ユニットによって形成されるすれ違いビームの配光パターンを説明するための図である。また、図2(B)は、前照灯ユニットによって形成される走行ビームの配光パターンを説明するための図である。各図においては、一例として自車両の前方25mの位置で鉛直方向に配置される仮想スクリーン状での配光パターンが示されている。
図2(A)に示すように、すれ違いビームは、ワイド領域a1、ミッド領域a2、ホット領域a3、オーバーヘッド領域a4を含んでいる。ワイド領域a1は、自車両前方を左右方向に広く照らす領域である。ミッド領域a2は、自車両前方のワイド領域a1より狭い範囲を比較的高光度の光で照らす領域である。ホット領域a3は、自車両前方の中央付近を高光度の光で照らす領域である。オーバーヘッド領域a4は、運転者が標識を視認するための低光度の光を照らす領域である。光の明暗境界線の上下位置は、例えば自車線側において車両前後軸に対して0°であり、対向車線側においては車両前後軸に対して0.57°である。なお、この0.57°という値は、100m先で1m光軸が下がる(1%)ということを意味する。
図2(B)に示すように、走行ビームは、ワイド領域b1、ミッド領域b2、ホット領域b3を含んでいる。ワイド領域b1は、自車両前方を左右方向に広く照らす領域である。ミッド領域b2は、自車両前方のワイド領域b1より狭い範囲を比較的高光度の光で照らす領域である。ホット領域b3は、自車両前方の中央付近を高光度の光で照らす領域である。いずれの領域もすれ違いビームの各領域よりも相対的に高い位置まで光を照らすように設定されている。
図3は、車載カメラによって撮影される画像の一例を模式的に示す図である。この図では、片側対向一車線の道路を自車両が走行しており、自車線において先行車両が存在し、対向車線に対向車が存在しており、かつ自車線の外側、対向車線の外側にそれぞれ非発光体である歩行者が存在する様子が示されている。
図4は、制御装置による点灯制御方法について説明するための図である。詳細には、図4(A)は車載カメラによるシャッター動作のタイミングについて示す図であり、図4(B)は前照灯ユニットによる光の照射光度の時間変化を示す図である。なお、図4(B)に示すグラフの縦軸は、LEDモジュール31に与えられる電流値の時間変化とほぼ一致するので、参考として縦軸には「(電流値)」と併記している。
図4(A)において、「ON」とは車載カメラ10のシャッターが開いた状態(露光状態)を表し、「OFF」とは車載カメラ10のシャッターが閉じた状態(非露光状態)を表している。車載カメラ10は、露光状態の期間(露光時間)において撮像素子12で光を蓄積することで画像を撮影する。車載カメラ10によって撮影された画像は、非露光状態の期間(非露光時間)に読み出される。なお、1回の撮影(静止画像)を1フレームといい、1秒間中の撮影回数(静止画像数)をフレームレートという。例えば、30fpsとは、1秒間に30回撮影する(静止画像を取り込む)ことをいう。
ここで、撮像素子12は、外部からの入射光を蓄積することで画像を得ているので、暗所での撮影において十分な光量を得るには、露光時間を長くするか、あるいは撮影対象を明るくするために前照灯ユニット30による光の照度を高くする必要がある。他方で、少ない光量で撮影するには、撮像素子12の感度(ゲイン)を高くすることでも対応できる。
図4(A)において、車載カメラ10の露光パターンは、T1〜T2間の露光時間と、T2〜T3間の非露光時間を1つの露光サイクル(単位露光サイクル)としてこれを繰り返す。図示の例では露光時間と非露光時間が同じ(1:1)となっているがこれに限定されない。一般に、露光時間は長いほど画像のブレが大きくなるので短いほうが好ましい。また、フレームレート(サイクル数/秒)は、空走距離が短いほうが好ましいので、30fps以上が好ましく、100fps以上であればさらに好ましい。
図4(B)に示す光照射パターンは、前方車両が存在しているため、前照灯ユニット30から走行ビームを照射せずにすれ違いビームのみを照射する状況において、走行ビームの照射範囲(図2(B)参照)に照射される光の照射パターンを示している。図示の横軸は時間、縦軸は前照灯ユニット30による照射光の光度である。前照灯ユニット30による光の点灯状態は、制御装置20により制御される。
図示のように、前照灯ユニット30による光は、露光時間に同期した露光帯において複数のパルス光(例示では3つのパルス光)を含み、かつ非露光時間に同期した非露光帯においても複数のパルス光(例示では3つのパルス光)を含む。図示の例では、露光時間と非露光時間のパルス光の数は同じであり、かつ、各パルス光のパルス幅も同じである。また、各パルス光は、相対的に高い値の光度値(高光度値)と低い値の光度値(低光度値)の各期間で1つの照射サイクルを形成しており、この照射サイクルを繰り返す。ここで、本実施形態では低光度値についても0より高い値とされている。それにより、フリッカーをさらに抑制する効果が得られる。
なお、図示のパルス光は、ノコギリ波で変調した形状となっているが、サイン波状や三角波状などで変調した形状であってもよい。
図示の例では、露光帯における複数のパルス光は、各々の高光度値が徐々に低くなるように設定されている。そして、これら複数のパルス光の高光度値は、すべてLEDモジュール31における通常の連続点灯時の光度値(定格光度値)よりも高く設定されている。また、露光帯における複数のパルス光の低光度値は、すべて同じ値に設定されており、かつ、連続点灯時の光度値よりも低く設定されている。また、露光帯における高光度値と低光度値をすべて平均した値である高平均値は、連続点灯時の定格光度値(連続点灯光度)よりも高く設定されている。
非露光帯における複数のパルス光についても、露光帯における複数のパルス光は、各々の高光度値が徐々に低くなるように設定されている。また、非露光帯における複数のパルス光は、低光度値がすべて同じ値に設定されており、かつ連続点灯時の光度値よりも低く、かつ露光帯における複数のパルス光の低光度値よりも低く設定されている。また、非露光帯における高光度値と低光度値をすべて平均した値である低平均値は、露光帯における高平均値よりも低く、かつ連続点灯時の定格光度値(連続点灯光度)よりも低く設定されている。
このように、車載カメラ10の露光パターンと前照灯ユニット30による光照射パターンを同期させ、露光時間中における照射光の高平均光度を高くしている。この場合に、光源であるLEDモジュール31の各LED(半導体発光素子)は、出力を高く設定すると発熱量も増加するので適切に放熱させる必要がある。図示の照射パターンでは、各照射サイクルにおいて高光度値の後に低光度値とするので、低光度値の期間を熱拡散時間として用いて良好な放熱状態を確保できる。このため、高光度値を比較的高い値、具体的には連続点灯時の定格光度値よりも高く設定することができる。また、連続点灯光度よりも高い値である高平均光度の露光帯と、連続点灯光度よりも低い低平均光度の非露光帯とを交互に繰り返しているので、連続点灯時と同様な放熱状態を確保できる。
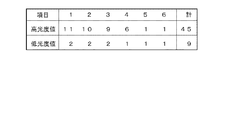
図5は、照射サイクルと光度値のリップルとの関係について説明するための図である。図4(B)に示した照射パターンにおいて、露光時間と非露光時間の比率が1:1であり、また、1照射サイクルにおける高光度値と低光度値の時間比率が1:1であり、1露光サイクル当たりの照射サイクルの数が6回(1〜3回が露光帯、4〜6回が非露光帯)であるとする。図5において「項目」とは照射サイクルの数を示しており、「高光度値」、「低光度値」は各照射サイクルにおけるパルス光の光度値の規格化値を示している。
連続点灯時の光度値は下記の計算に基づいて4.5(規格化値)となる。
連続点灯時の光度値=(45/6+9/6)/2=4.5
連続点灯時の光度値=(45/6+9/6)/2=4.5
これに対して、高平均光度は下記の通り、6.0となる。
高光度値の平均値=(11+2+10+2+9+2)/6=6.0
高光度値の平均値=(11+2+10+2+9+2)/6=6.0
また、低平均光度は下記の通り、3.0となる。
低光度値の平均値=(6+1+5+1+4+1)/6=3.0
低光度値の平均値=(6+1+5+1+4+1)/6=3.0
これらから、リップル率は下記の通り、約1.3となる。
リップル率=高平均光度/連続点灯光度≒1.3
リップル率=高平均光度/連続点灯光度≒1.3
図6は、照射サイクルとフリッカーの関係を説明するための図である。ここでは、上記と同様に、露光時間と非露光時間の時間比を1:1、照射サイクルを6回とする。図示のように、各種時間は車載カメラ10のフレームレートに対応して決まる。例えば、車載カメラ10のフレームレートが30fpsであれば、1露光サイクルの期間は33.3msとなり、露光時間と非露光時間はそれぞれ16.7msとなる。照射サイクルの周波数は180Hz(=30×6)となる。1照射サイクルの時間は5.6ms、高光度値と低光度値の各時間は2.8msとなる。前照灯ユニット30による光の明暗周期は照射サイクルの周期に一致するので、フレームレートが30fpsであれば180Hzとなる。そして、露光帯における低光度率は18%(=2/11×100)、非露光帯における低光度率は17%(=1/6×100)となる。また、全体の低光度率は9.1%(=1/11×100)となるので、フリッカーを抑制できる。なお、光の明暗周期は100Hz以上となることが好ましい。フレームレートが60fps、90fps、120fpsの場合も同様である。
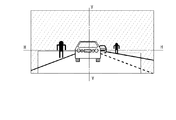
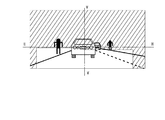
図7は、本実施形態の車載カメラにより撮影される画像について模式的に示す図である。また、図8は、比較例の車載カメラにより撮影される画像について模式的に示す図である。図8に示すように、夜間において前方車両が存在する場合には、前方車両の前照灯や尾灯による光に対応してオートゲイン機能により車載カメラ10の感度が低下することから、すれ違いビームが照射された領域以外の領域では非常に暗い画像となり、道路脇の歩行者などの非発光体の撮影、検出が困難となる。
これに対して、図7に示すように本実施形態では、車載カメラ10の露光時間に対応させて複数のパルス光が照射されることにより、すれ違いビームの照射領域以外の領域においても実効的な光量が増加する。従って、オートゲイン機能により車載カメラ10の感度が低下しても道路脇の歩行者などの非発光体からの反射光量が増加するので、非発光体の撮影、検出が容易になる。
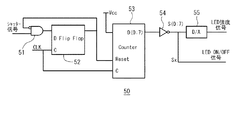
図9は、ノコギリ波を生成するための回路の一例を示す図である。この回路は、ANDゲート51、Dフリップフロップ52、カウンタ53、NOTゲート54、デジタルアナログ変換器(D/A)55を含んで構成されている。この回路は、制御装置20に含まれる。
この回路50において、ANDゲート51は、一方入力端にシャッター信号(シャッターのオン/オフ状態を示す信号)が入力され、他方入力端にDフリップフロップ52の出力信号を反転した信号が入力されている。フリップフロップ52とカウンタ53は、クロック信号CLKにより同期して動作する。シャッター信号がANDゲート51を介してフリップフロップ52に入力されると、その立ち上がりエッジが検出されてフリップフロップ52の出力信号がカウンタ53へリセット信号として与えられる。なお、Dフリップフロップ52はクロック同期でなくとも動作する。
カウンタ53は、常時加算されるように、入力端が電源電圧VCCに接続されている。カウンタ53のバス信号はNOTゲート54により反転され、減算される出力となり、デジタルアナログ変換器55によってアナログ信号に変換され、LEDの強度信号S(0:7)として出力される。また、Sx信号は、カウンタ数により反転するため、LEDのオン/オフ信号として出力される。S0信号を用いることで最も速くなる。これにより、ノコギリ波を生成することができる。
なお、上記回路と同様の動作は、マイコンを用いてテーブル値を参照する方法で実現することもでき、FPGAやCPLDなどのデジタル回路を用いて実現することもでき、ロジックICを用いて実現することもできる。
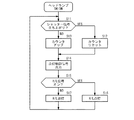
図10は、車両用前照灯システムの動作手順の一例を示すフローチャートである。なお、ここに示すフローチャートの動作は繰り返し実行されるものとする。
上記の回路50において、車載カメラ10のシャッター信号の立ち上がりエッジが検出されると(ステップS11;YES)、カウンタ53がリセットされる(ステップS12)。他方で、シャッター信号の立ち上がりエッジが検出されない場合には(ステップS11;NO)、カウンタ53のカウント数が増加する(ステップS13)。
カウンタ53のカウント数に応じて、制御装置20によって点灯制御信号が生成され、出力される(ステップS14)。
運転者の操作により自車両のヘッドランプスイッチがオンになっている場合には(ステップS15;YES)、制御装置20により前照灯ユニット(H/L)30が点灯するように制御される(ステップS16)。ヘッドランプスイッチがオフの場合には(ステップS15;NO)、制御装置20により前照灯ユニット(H/L)30が消灯するように制御される(ステップS17)。
図11は、変形実施例について説明するための図である。上記した図4と同様に、図11(A)は車載カメラによるシャッター動作のタイミングについて示す図であり、図11(B)は前照灯ユニットによる光の照射光度の時間変化を示す図である。この変形実施例は、照射光の変調に正弦波を用いた例である。具体的には、正弦波の波高値が相対的に高くなる期間を露光帯に対応付け、波高値が相対的に低くなる期間を非露光帯に対応づけて照射光を変調している。このような変形実施例によっても上記した実施形態と同様の効果が得られる。さらに、正弦波を変調に用いることで、照射光度の急激な変化が少なくなるので、フリッカーをより抑える効果が期待できる。
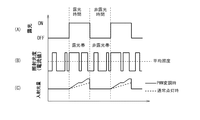
図12は、他の変形実施例について説明するための図である。上記した実施形態等では前照灯ユニット30による光の照射強度を電流制御していたが、PWM(Pulse Width Modulation)制御によって光の実質的な照射強度(照射量)を増減することもできる。上記した図4と同様に、図12(A)は車載カメラによるシャッター動作のタイミングについて示す図であり、図12(B)は前照灯ユニットによる光の照射光度の時間変化を示す図である。また、図12(C)は車載カメラの撮像素子への入射光量の時間変化を示す図である。
図12(B)に示すように、露光帯におけるパルス幅を大きくすることで非発光体への実効的な照射光量を増加させ、シャッター開放時の撮像素子12への入射光量をより大きくすることができる。なお、PWM制御による照射光度の波高値は、通常の連続点灯時よりも大きいものとする。また、露光帯と非露光帯の全体としてのデューティ比は50%となっている。図12(C)に示すように、シャッター開放時の撮像素子12への入射光量は図示のように照射光度が高い期間において積分されて上昇していく。このときの入射光量は、通常の連続点灯時における入射光量よりも大きくなる。このため、被写体をより明るく撮像できる。このようなPWM制御を用いることで、デジタルアナログ変換器が不要となるため、点灯制御回路32をより簡素に(すなわち安価に)することができる。
図13は、PWM制御の一例を示す図である。図示の例では、露光サイクルの1周期を16分割し、さらに1つの単位を16分割している。各単位ごとのオン/オフ時間比は、例えば図14に示すように配分する。単位1〜8の時間がシャッター開、単位9〜16の時間がシャッター閉に対応しているとすると、シャッター開の時は点灯時間が長く、閉じている時は点灯時間が短くなる。図14に示す例では、点灯時間比は100:36となる。フリッカーを低減するには分割数がより細かいほうが好ましい。
図15は、PWM制御を行うための回路の一例を示す図である。この回路150は、ANDゲート51、Dフリップフロップ52、カウンタ53、コンパレータ(比較器)56、ORゲート57を含んで構成されている。この回路は、制御装置20に含まれる。この回路150は、上記した図9に示す回路50と一部構成が共通しており、当該共通する構成については同一符号が付されている。
この回路150において、ANDゲート51、Dフリップフロップ52、カウンタ53からなる部分は上記した回路50と同様に動作するため、詳細な説明を省略する。コンパレータ56は、カウンタ53のバス信号の上位4ビットであるS(4:7)と下位4ビットであるS(0:3)とを比較し、下位4ビットが上位4ビット以上の場合に出力がハイ(高電位)となり、下位4ビットが上位4ビット未満の場合には出力がロー(低電位)となる。ORゲート57は、これらの出力の論理和に対応する信号を出力する。このORゲート57の出力を用いて、図15に示した波形を有するPWM信号を生成することができる。
以上のような実施形態等によれば、歩行者等に対するグレアを低減しつつ歩行者等をより良好に撮影できるようにすることができる。
なお、本発明は上述した実施形態等の内容に限定されるものではなく、本発明の要旨の範囲内において種々に変形して実施をすることが可能である。例えば、上記した実施形態等においては本発明を車両用前照灯システムに適用した場合について例示していたが、本発明の適用範囲はこれに限定されず、例えば、後退時において点灯する後退灯とこれに連動して自車両の後方空間を撮影する車載カメラとを含む車両用灯具システムに対して本発明を適用することも可能である。
10:車載カメラ
11:撮影レンズ
12:撮像素子
13:カメラ制御回路
20:制御装置
30:前照灯ユニット
31:LEDモジュール
32:点灯制御回路
33:リフレクタ
34:シェード
35:投影レンズ
36:灯体ハウジング
37:アウターレンズ
11:撮影レンズ
12:撮像素子
13:カメラ制御回路
20:制御装置
30:前照灯ユニット
31:LEDモジュール
32:点灯制御回路
33:リフレクタ
34:シェード
35:投影レンズ
36:灯体ハウジング
37:アウターレンズ
Claims (4)
- 自車両の周辺空間を撮影する車載カメラと、
前記周辺空間に対して光を照射する車両用灯具と、
前記車両用灯具の点灯状態を制御する制御装置と、
を含み、
前記車載カメラは、露光時間と非露光時間を有する単位露光サイクルを繰り返して当該露光時間に前記周辺空間を撮影するものであり、
前記制御装置は、前記車両用灯具により、前記露光時間と前記非露光時間の各々で複数のパルス光を照射されるように当該車両用灯具の点灯状態を制御するものであり、
前記露光時間における前記複数のパルス光の光度の平均的な大きさが相対的に高く、前記非露光時間における前記複数のパルス光の光度の平均的な大きさが相対的に低く設定されている、
車載システム。 - 前記制御装置は、少なくとも前記露光時間における前記複数のパルス光を電流制御しており、
前記複数のパルス光は、各々の大きさが異なっており、
前記光度の平均的な大きさは、前記複数のパルス光の各々の大きさの平均値である、
請求項1に記載の車載システム。 - 前記制御装置は、少なくとも前記露光時間における前記複数のパルス光をPWM制御しており、
前記複数のパルス光は、各々の大きさが同じであり、
前記光度の平均的な大きさは、前記複数のパルス光によって得られる実効的な光度である、
請求項1に記載の車載システム。 - 前記露光時間における前記複数のパルス光の光度の平均的な大きさは、前記車両用灯具の連続点灯時の定格光度値よりも高く設定されている、
請求項1〜3の何れか1項に記載の車載システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016084323A JP2017193239A (ja) | 2016-04-20 | 2016-04-20 | 車載システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016084323A JP2017193239A (ja) | 2016-04-20 | 2016-04-20 | 車載システム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017193239A true JP2017193239A (ja) | 2017-10-26 |
Family
ID=60155816
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016084323A Pending JP2017193239A (ja) | 2016-04-20 | 2016-04-20 | 車載システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2017193239A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020246464A1 (ja) * | 2019-06-07 | 2020-12-10 | スタンレー電気株式会社 | 車両用灯具及び車両前方検知システム |
| US11325525B2 (en) | 2020-07-03 | 2022-05-10 | Hyundai Mobis Co., Ltd. | Asynchronous control system in camera built-in lamp and method thereof |
| JP7444636B2 (ja) | 2020-02-27 | 2024-03-06 | 株式会社小糸製作所 | 車両用前照灯 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS55126224A (en) * | 1979-03-23 | 1980-09-29 | Mamiya Koki Kk | Controlling method for light emission of strobe light emitting device |
| JPS60114039U (ja) * | 1984-01-11 | 1985-08-01 | 日産自動車株式会社 | 視界向上装置 |
| JP2007223342A (ja) * | 2006-02-21 | 2007-09-06 | Hitachi Ltd | 車両の後方監視カメラ及び運転支援装置 |
| JP2011084237A (ja) * | 2009-10-19 | 2011-04-28 | Koito Mfg Co Ltd | 車輌用前照灯の制御システム |
| JP2014076726A (ja) * | 2012-10-10 | 2014-05-01 | Fuji Electric Co Ltd | 電気自動車のヘッドライト制御装置 |
-
2016
- 2016-04-20 JP JP2016084323A patent/JP2017193239A/ja active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS55126224A (en) * | 1979-03-23 | 1980-09-29 | Mamiya Koki Kk | Controlling method for light emission of strobe light emitting device |
| JPS60114039U (ja) * | 1984-01-11 | 1985-08-01 | 日産自動車株式会社 | 視界向上装置 |
| JP2007223342A (ja) * | 2006-02-21 | 2007-09-06 | Hitachi Ltd | 車両の後方監視カメラ及び運転支援装置 |
| JP2011084237A (ja) * | 2009-10-19 | 2011-04-28 | Koito Mfg Co Ltd | 車輌用前照灯の制御システム |
| JP2014076726A (ja) * | 2012-10-10 | 2014-05-01 | Fuji Electric Co Ltd | 電気自動車のヘッドライト制御装置 |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020246464A1 (ja) * | 2019-06-07 | 2020-12-10 | スタンレー電気株式会社 | 車両用灯具及び車両前方検知システム |
| JP2020199831A (ja) * | 2019-06-07 | 2020-12-17 | スタンレー電気株式会社 | 車両用灯具及び車両前方検知システム |
| JP7234042B2 (ja) | 2019-06-07 | 2023-03-07 | スタンレー電気株式会社 | 車両用灯具及び車両前方検知システム |
| JP7444636B2 (ja) | 2020-02-27 | 2024-03-06 | 株式会社小糸製作所 | 車両用前照灯 |
| US11325525B2 (en) | 2020-07-03 | 2022-05-10 | Hyundai Mobis Co., Ltd. | Asynchronous control system in camera built-in lamp and method thereof |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5955356B2 (ja) | 照明装置 | |
| JP3660877B2 (ja) | 連続可変ヘッドライトの制御 | |
| US20120127313A1 (en) | Method and device for a vehicle-based illumination in insufficiently illuminated traffic environments | |
| CN110770081B (zh) | 车辆用灯具系统、车辆用灯具的控制装置及车辆用灯具的控制方法 | |
| JPWO2015033764A1 (ja) | 車両用灯具 | |
| JP2018524225A (ja) | 車両用の前照灯 | |
| JP2009184642A (ja) | 車両用前照灯装置 | |
| JP2017193239A (ja) | 車載システム | |
| JPWO2019131055A1 (ja) | 車両用灯具システム、車両用灯具の制御装置及び車両用灯具の制御方法 | |
| JP5251680B2 (ja) | 照明制御装置及びプログラム | |
| JP5416542B2 (ja) | 車輌用前照灯の制御システム | |
| JP2009018804A (ja) | 自動車用補助機器制御装置 | |
| JP7267694B2 (ja) | 車両用灯具 | |
| JP6935815B2 (ja) | 照明撮像装置 | |
| JP2013154741A (ja) | 車両用前照灯の点灯制御装置、車両用前照灯システム | |
| KR102184335B1 (ko) | 고명암비 이미지의 생성 방법 및 장치 | |
| WO2022172860A1 (ja) | 車両用前照灯 | |
| JP2013147111A (ja) | 車両用前照灯の点灯制御装置、車両用前照灯システム | |
| JP2019116202A (ja) | 前照灯制御装置 | |
| CN114026843A (zh) | 车载红外线照明装置 | |
| JP6944310B2 (ja) | 特定対象物検出装置 | |
| JP2020142615A (ja) | 車両用灯具の制御装置、車両用灯具の制御方法、車両用灯具システム | |
| JP7458820B2 (ja) | 車両用前照灯 | |
| JP7406553B2 (ja) | 車載照明装置 | |
| WO2022085683A1 (ja) | 車両用灯具システム、配光制御装置および配光制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190307 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20191127 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20191203 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20200528 |