JP2017190955A - 認識装置 - Google Patents
認識装置 Download PDFInfo
- Publication number
- JP2017190955A JP2017190955A JP2016078912A JP2016078912A JP2017190955A JP 2017190955 A JP2017190955 A JP 2017190955A JP 2016078912 A JP2016078912 A JP 2016078912A JP 2016078912 A JP2016078912 A JP 2016078912A JP 2017190955 A JP2017190955 A JP 2017190955A
- Authority
- JP
- Japan
- Prior art keywords
- recognition
- lens barrels
- lifting platform
- attached
- optical axis
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000003384 imaging method Methods 0.000 claims abstract description 15
- 230000003287 optical effect Effects 0.000 claims abstract description 14
- 238000005286 illumination Methods 0.000 claims description 7
- 230000003028 elevating effect Effects 0.000 claims description 6
- 230000001174 ascending effect Effects 0.000 abstract 2
- 230000005540 biological transmission Effects 0.000 description 5
- 239000003550 marker Substances 0.000 description 2
- 238000005192 partition Methods 0.000 description 2
- 239000004065 semiconductor Substances 0.000 description 2
- VYPSYNLAJGMNEJ-UHFFFAOYSA-N Silicium dioxide Chemical compound O=[Si]=O VYPSYNLAJGMNEJ-UHFFFAOYSA-N 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 239000000758 substrate Substances 0.000 description 1
Images

Landscapes
- Length Measuring Devices By Optical Means (AREA)
- Image Input (AREA)
- Wire Bonding (AREA)
Abstract
【課題】広範囲な寸法の対象物の認識を行うことができ、かつ、ワーキングディスタンスを一定にして、高精細で安定した認識を行うことができる認識装置を提供すること。【解決手段】第1および第2鏡筒(11,12)、第1および第2撮像装置(15,16)および第1および第2側反射部材(21,22)は、昇降台(10)の昇降に伴って、一体になって昇降する。上記第1および第2鏡筒(11,12)の光軸方向の第1および第2光線は、第1および第2側反射部材(21,22)によって上記光軸方向と直角に屈曲させられて、断面が直角2等辺三角形状の一体のセンタープリズム(5)の側面に照射されて、それらの側面でさらに直角に屈曲させられて、認識対象物に向けて照射される。【選択図】図1
Description
この発明は、例えば、IC(集積回路)、半導体素子等の位置決めマークの認識等に用いられる認識装置に関する。
従来、この種の認識装置としては、特開2012−42436号公報(特許文献1)に記載のものがある。
この従来の認識装置は、同軸照明部を有する鏡筒からの光を側プリズムで直角に屈曲させ、さらに、2つの平行四辺形プリズムで屈曲して位置決めマーク等の認識対象物に向けて光線を照射するようにしている。
しかしながら、上記従来の認識装置では、認識対象物の寸法に応じて平行四辺形プリズムの寸法を変えなければならず、種々の寸法の認識対象物に対応することが困難であると言う問題があった。
最近、小型情報端末はより高精細化し、また、ウエアラブル端末はより小型化、軽量化が進んでいる。このため、ICのサイズも、従来よりも遥かに小さい35mmから2mm程のものが使用されるようになってきており、また、高精度な2μm程度の実装も要求されるようになってきた。
これに対して、上記従来の認識装置では、35mmから2mm程の広範囲な寸法に対応することができず、また、ワーキングディスタンス(Working Distance:鏡筒端から認識対象物までの距離)が変動するため、高精細で安定した認識ができないという問題があった。
そこで、この発明の課題は、広範囲な寸法の対象物の認識を行うことができ、かつ、ワーキングディスタンスを一定にして、高精細で安定した認識を行うことができる認識装置を提供することにある。
上記課題を解決するため、この発明の認識装置は、
本体
上記本体に取り付けられると共に、断面が直角2等辺三角形状の一体のセンタープリズムと、
上記本体に沿って昇降できる昇降台と、
上記昇降台に取り付けられると共に、同軸照明部を有する互いに平行な第1および第2鏡筒と、
上記昇降台に取り付けられると共に、上記第1および第2鏡筒の一端側に配置された第1および第2撮像装置と、
上記昇降台に取り付けられると共に、上記第1および第2鏡筒の他端側に配置された第1および第2側反射部材と
を備え、
上記第1および第2鏡筒、第1および第2撮像装置および第1および第2側反射部材は、上記昇降台の昇降に伴って、一体になって昇降し、
上記第1および第2鏡筒の光軸方向の第1および第2光線は、上記第1および第2側反射部材によって上記光軸方向と直角に屈曲させられて、上記センタープリズムの側面に照射されて、それらの側面でさらに直角に屈曲させられて、認識対象物に向けて照射されるように構成されていることを特徴としている。
本体
上記本体に取り付けられると共に、断面が直角2等辺三角形状の一体のセンタープリズムと、
上記本体に沿って昇降できる昇降台と、
上記昇降台に取り付けられると共に、同軸照明部を有する互いに平行な第1および第2鏡筒と、
上記昇降台に取り付けられると共に、上記第1および第2鏡筒の一端側に配置された第1および第2撮像装置と、
上記昇降台に取り付けられると共に、上記第1および第2鏡筒の他端側に配置された第1および第2側反射部材と
を備え、
上記第1および第2鏡筒、第1および第2撮像装置および第1および第2側反射部材は、上記昇降台の昇降に伴って、一体になって昇降し、
上記第1および第2鏡筒の光軸方向の第1および第2光線は、上記第1および第2側反射部材によって上記光軸方向と直角に屈曲させられて、上記センタープリズムの側面に照射されて、それらの側面でさらに直角に屈曲させられて、認識対象物に向けて照射されるように構成されていることを特徴としている。
なお、この明細書では、上記第1および第2撮像装置が昇降台に直接取り付けている場合に限らず、上記第1および第2鏡筒を介して間接的に昇降台に取り付けられていても、昇降台に取り付けられていると言う。上記第1および第2側反射部材についても、同様で、直接昇降台に取り付けられている場合に限らず、上記第1および第2側反射部材が第1および第2鏡筒を介して間接的に昇降台に取り付けられていても、この明細書では、上記第1および第2側反射部材が昇降台に取り付けられていると言う。
上記構成の認識装置によれば、上記昇降台を昇降させることによって、上記第1および第2鏡筒、第1および第2撮像装置および第1および第2側反射部材が一体になって昇降するため、上記第1および第2側反射部材によって、直角に屈曲された第1および第2光線のセンタープリズムの側面への照射位置が上下し、これによって、第1光線と第2光線との間の距離、つまり、認識対象物の寸法を簡単に広範囲に調整でき、広範囲な寸法の認識対象物を認識することができる。
特に、上記センタープリズムが、断面が直角2等辺三角形状の一体の構造で、内部に仕切り壁等がないため、上記昇降台を上昇させて上記センタープリズムの頂点近くの側面で、上記第1および第2光線を反射させて、第1光線と第2光線との距離を微小距離にして、例えば、2mm程度の微小距離の認識対象物(マーカ等)も認識することができる。
また、上記第1および第2鏡筒、第1および第2撮像装置および第1および第2側反射部材は、上記昇降台の昇降に伴って、一体になって昇降し、上記第1および第2鏡筒の光軸方向の第1および第2光線は、上記第1および第2側反射部材によって上記光軸方向と直角に屈曲させられて、上記断面が直角2等辺三角形状の一体のセンタープリズムの側面に照射されて、それらの側面でさらに直角に屈曲させられるから、ワーキングディスタンスが変動することがなく、一定であるため、画像がぼやけることがなくて、高精細で安定した認識ができる。
また、上記構成の発明では、上記第1および第2鏡筒、第1および第2撮像装置および第1および第2側反射部材が取り付けられた上記昇降台が、上記断面が直角2等辺三角形状の一体のセンタープリズムが取り付けられた本体に沿って昇降し、本体の後面側に位置し、本体の前面側、側面側が空いているから、レイアウトが容易である。
1実施形態では、
上記センタープリズムの頂点から延びる遮蔽板を有する。
上記センタープリズムの頂点から延びる遮蔽板を有する。
上記実施形態では、上記遮蔽板で乱光を遮ることができるから、高精細な認識ができる。
1実施形態では、
上記昇降台を昇降させるように駆動する昇降駆動装置を備える。
上記昇降台を昇降させるように駆動する昇降駆動装置を備える。
上記実施形態では、上記昇降駆動装置を備えるから、昇降台を自動的に精度の高い制御をして、迅速に昇降させることができる。
この発明によれば、広範囲な寸法の対象物の認識を行うことができ、かつ、ワーキングディスタンスを一定にして、高精細で安定した認識を行うことができる。
以下、この発明を図示の実施形態により詳細に説明する。
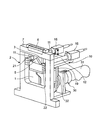
図1に示すように、この実施形態の認識装置は、中央に開口1を有する枠状の本体2を備え、この本体2の開口1に垂下した支持部材3で、断面が直角2等辺三角形状の一体のセンタープリズム5を支持している。このセンタープリズム5は、斜辺を底面側としている。
また、上記本体2の上梁部7には、例えば、石英ガラスや単なる開口からなる光透過部6を設けて、この光透過部7を、センタープリズム5で上方に反射された光線が透過できるようにしている。この光透過部7の上方には、図示しないが、被認識物としてのIC(集積回路)、ACF(異方性導電シート)、ガラス基板、FPC(フレキシブル印刷回路基板)等が配置される。
上記本体2の後面側には、図1および2に示すように、本体2に沿って昇降できる昇降台10を設けている。この昇降台10には、第1鏡筒11と第2鏡筒12とを互いに平行に取り付けている。上記第1鏡筒11と第2鏡筒12とには、同軸照明部13,14を設けており、同軸照明ができるようにしている。上記同軸照明部13,14に、公知の構造で、図示しないが、LED、半導体レーザ等の光源部と、ハーフミラーを有する。
上記第1および第2鏡筒11,12の一端側には、第1および第2撮像装置15,16を取り付けている。上記第1および第2撮像装置15,16は、例えば、CCDカメラ等である。
なお、上記第1および第2撮像装置15,16は上記第1および第2鏡筒11,12に取り付けているが、直接、昇降台10に取り付けてもよい。
一方、上記昇降台10には、上記第1および第2鏡筒11,12の他端側に位置するように、第1および第2側反射部材としての第1および第2側プリズム21,22を取り付けている。上記第1および第2側プリズム21,22は、三角柱状であり、上記第1および第2鏡筒11,12の光軸方向の第1および第2光線は、上記第1および第2側プリズム21,22によって上記光軸方向と直角に屈曲させられて、上記センタープリズム5の側面に照射されて、それらの側面でさらに直角に屈曲させられて、透過部6を通って図示しない認識対象物に向けて照射されるようになっている。
また、上記昇降台10は、本体2に設けたガイド部材19で案内して、昇降駆動装置30で昇降させるようにしている。この昇降駆動装置30は、サーボモータやステッピングモータ等のモータ31と、このモータ31の回転力を、昇降台10を昇降させる直線運動の力に変える例えばカム機構や送りネジ機構やボールネジなどからなる伝達機構32とからなる。
このように、上記昇降駆動装置30によって、昇降台10を自動的に精度の高い制御をして、迅速に昇降させることができるようにしている。
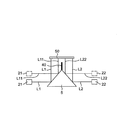
また、図3に示すように、上記センタープリズム5の頂点から延びる遮蔽板40を設けて、上記センタープリズム5の左右の光(乱交)を遮って、IC等の被認識物50の高精細な認識ができるようにしている。
上記構成の認識装置おいて、上記昇降台10を昇降駆動装置30によって下方に位置させて、図3に示すように、昇降台10上の第1および第2側プリズム21,22等を下方に位置させると、第1および第2鏡筒11,12の光軸方向の第1および第2光線L1,L2は、第1および第2側プリズム21,22によって、直角に屈曲されて、センタープリズム5の側面の下方の位置に照射されて、これによって、第1光線L1と第2光線L2は、広い間隔で被対象物50に照射される。
一方、上記昇降台10を昇降駆動装置30によって上方に位置させて、図3に一点鎖線で示すように、昇降台10上の第1および第2側プリズム21,22等を上方に位置させると、第1および第2鏡筒11,12の光軸方向の第1および第2光線L11,L22は、第1および第2側プリズム21,22によって、直角に屈曲されて、センタープリズム5の側面の上方の位置に照射されて、これによって、第1光線L11と第2光線L22は、狭い間隔で被対象物50に照射される。
このように、上記昇降台10を昇降駆動装置30によって適宜昇降させることによって、被対象物50に照射される第1光線L1,Ll1と第2光線L2,L22との間隔を簡単に広範囲に調整でき、広範囲な寸法の認識対象物50を認識することができる。
特に、上記センタープリズム5が、断面が直角2等辺三角形状の一体の構造で、内部に仕切り壁等がないため、上記昇降台10を上昇させて上記センタープリズム5の頂点近くの側面で、上記第1および第2光線L11,L22を反射させて、第1光線L11と第2光線L22との距離を微小距離にして、例えば、2mm程度の微小距離の認識対象物(マーカ等)も認識することができる。
また、上記第1および第2鏡筒11,12、第1および第2撮像装置15,16および第1および第2側プリズム21,22は、上記昇降台10の昇降に伴って、一体になって昇降し、上記第1および第2鏡筒11,12の光軸方向の第1および第2光線は、上記第1および第2側反射部材によって上記光軸方向と直角に屈曲させられて、上記断面が直角2等辺三角形状の一体のセンタープリズム5の側面に照射されて、それらの側面でさらに直角に屈曲させられるから、ワーキングディスタンスが変動することがなく、一定であるため、画像がぼやけることがなくて、高精細で安定した認識ができる。
なお、上記第1光線L1,Ll1と第2光線L2,L22とは、平行状態で走行する。
また、上記第1および第2鏡筒11,12、第1および第2撮像装置15,16および第1および第2側プリズム21,22が取り付けられた上記昇降台10が、上記断面が直角2等辺三角形状の一体のセンタープリズム5が取り付けられた本体2に沿って昇降し、本体2の後面側に位置し、本体2の前面側、側面側が空いているから、この認識装置のレイアウトが容易である。
上記実施形態では、第1および第2側反射部材として、プリズムを用いたが、鏡を用いてもよい。
また、上記実施形態では、昇降駆動装置30を備えるが、昇降台10をマイクロメータで送り量を測定できる送りネジ機構などで、手動で昇降させるようにしてもよい。
2 本体
5 センタープリズム
10 昇降台
11,12 鏡筒
13,14 同軸照明部
15,16 撮像装置
21,22 側プリズム
30 昇降駆動装置
40 遮蔽板
50 被認識物
5 センタープリズム
10 昇降台
11,12 鏡筒
13,14 同軸照明部
15,16 撮像装置
21,22 側プリズム
30 昇降駆動装置
40 遮蔽板
50 被認識物
Claims (3)
- 本体
上記本体に取り付けられると共に、断面が直角2等辺三角形状の一体のセンタープリズムと、
上記本体に沿って昇降できる昇降台と、
上記昇降台に取り付けられると共に、同軸照明部を有する互いに平行な第1および第2鏡筒と、
上記昇降台に取り付けられると共に、上記第1および第2鏡筒の一端側に配置された第1および第2撮像装置と、
上記昇降台に取り付けられると共に、上記第1および第2鏡筒の他端側に配置された第1および第2側反射部材と
を備え、
上記第1および第2鏡筒、第1および第2撮像装置および第1および第2側反射部材は、上記昇降台の昇降に伴って、一体になって昇降し、
上記第1および第2鏡筒の光軸方向の第1および第2光線は、上記第1および第2側反射部材によって上記光軸方向と直角に屈曲させられて、上記センタープリズムの側面に照射されて、それらの側面でさらに直角に屈曲させられて、認識対象物に向けて照射されるように構成されていることを特徴とする認識装置。 - 請求項1に記載の認識装置において、
上記センタープリズムの頂点から延びる遮蔽板を有することを特徴とする認識装置。 - 請求項1または2に記載の認識装置において、
上記昇降台を昇降させるように駆動する昇降駆動装置を備えることを特徴とする認識装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016078912A JP2017190955A (ja) | 2016-04-11 | 2016-04-11 | 認識装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016078912A JP2017190955A (ja) | 2016-04-11 | 2016-04-11 | 認識装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017190955A true JP2017190955A (ja) | 2017-10-19 |
Family
ID=60084837
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016078912A Pending JP2017190955A (ja) | 2016-04-11 | 2016-04-11 | 認識装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2017190955A (ja) |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0714884A (ja) * | 1993-04-30 | 1995-01-17 | Matsushita Electric Ind Co Ltd | デバイスのボンディング装置およびボンディング方法 |
| JPH08128805A (ja) * | 1994-11-01 | 1996-05-21 | Agency Of Ind Science & Technol | 非接触式相対変位測定法及び測定装置 |
| JPH099111A (ja) * | 1995-06-22 | 1997-01-10 | Niles Parts Co Ltd | 多方向撮像カメラ装置 |
| JP2002036953A (ja) * | 2000-07-31 | 2002-02-06 | Auto Network Gijutsu Kenkyusho:Kk | 車両周辺視認装置 |
| JP2003254714A (ja) * | 2002-02-28 | 2003-09-10 | Uht Corp | 位置検出方法及び位置検出装置並びにプリント基板の位置決め方法 |
| JP2005019873A (ja) * | 2003-06-27 | 2005-01-20 | Casio Comput Co Ltd | 駆動素子のボンディング方法 |
| JP2011039271A (ja) * | 2009-08-11 | 2011-02-24 | Hitachi High-Technologies Corp | 電子部品実装処理装置及び実装処理方法並びに電子部品実装アライメント方法 |
-
2016
- 2016-04-11 JP JP2016078912A patent/JP2017190955A/ja active Pending
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0714884A (ja) * | 1993-04-30 | 1995-01-17 | Matsushita Electric Ind Co Ltd | デバイスのボンディング装置およびボンディング方法 |
| JPH08128805A (ja) * | 1994-11-01 | 1996-05-21 | Agency Of Ind Science & Technol | 非接触式相対変位測定法及び測定装置 |
| JPH099111A (ja) * | 1995-06-22 | 1997-01-10 | Niles Parts Co Ltd | 多方向撮像カメラ装置 |
| JP2002036953A (ja) * | 2000-07-31 | 2002-02-06 | Auto Network Gijutsu Kenkyusho:Kk | 車両周辺視認装置 |
| JP2003254714A (ja) * | 2002-02-28 | 2003-09-10 | Uht Corp | 位置検出方法及び位置検出装置並びにプリント基板の位置決め方法 |
| JP2005019873A (ja) * | 2003-06-27 | 2005-01-20 | Casio Comput Co Ltd | 駆動素子のボンディング方法 |
| JP2011039271A (ja) * | 2009-08-11 | 2011-02-24 | Hitachi High-Technologies Corp | 電子部品実装処理装置及び実装処理方法並びに電子部品実装アライメント方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102491721B1 (ko) | 기판에 부품들을 장착하기 위한 장치 | |
| US20100196526A1 (en) | Optical shaping apparatus and shaping base | |
| WO2015190471A1 (ja) | ボンディング装置及びボンディングツールの着地点位置を推定する方法 | |
| KR20090118915A (ko) | 전자부품 실장용 장치에 있어서의 촬상용 조명장치 | |
| KR20160025441A (ko) | 묘화 장치 | |
| JP5373657B2 (ja) | 部品実装装置および部品実装方法 | |
| CN102385261A (zh) | 一种光刻机共轴对焦装置及对焦方法 | |
| CN101101452A (zh) | 曝光装置 | |
| TW202202950A (zh) | 曝光用之光源裝置、照明裝置、曝光裝置及曝光方法 | |
| CN211669102U (zh) | 基板检查装置 | |
| KR20150067077A (ko) | 노광 장치, 노광 방법 및 미러 휨 기구 부착 반사경 | |
| JP5081967B2 (ja) | スクリーンマスクの計測装置および印刷装置 | |
| JP2019194553A (ja) | 位置検出装置、および位置検出方法 | |
| CN101584263A (zh) | 电子元件安装设备中用于图像捕获的照明装置 | |
| JP2002168800A (ja) | 外観検査装置 | |
| JP2017190955A (ja) | 認識装置 | |
| WO2014141497A1 (ja) | 撮像素子の位置調整装置 | |
| JP2012253059A (ja) | 電子部品実装装置 | |
| KR101833611B1 (ko) | 측정 장치 | |
| JP7356667B2 (ja) | 位置合わせ装置 | |
| CN108886887B (zh) | 基板作业装置及元件安装装置 | |
| KR101212382B1 (ko) | 박막 두께 측정장치 | |
| CN106687866B (zh) | 曝光装置用反射镜单元及曝光装置 | |
| JPWO2019059315A1 (ja) | 露光用照明装置、露光装置及び露光方法 | |
| CN105045043B (zh) | 曝光装置和曝光方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20171003 |