JP2017146100A - レーダ装置を備えた車両 - Google Patents
レーダ装置を備えた車両 Download PDFInfo
- Publication number
- JP2017146100A JP2017146100A JP2016025583A JP2016025583A JP2017146100A JP 2017146100 A JP2017146100 A JP 2017146100A JP 2016025583 A JP2016025583 A JP 2016025583A JP 2016025583 A JP2016025583 A JP 2016025583A JP 2017146100 A JP2017146100 A JP 2017146100A
- Authority
- JP
- Japan
- Prior art keywords
- antenna
- vehicle
- area
- radar device
- areas
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images








Abstract
【解決手段】対象物の検知を行うレーダ装置30を備えた車両1であって、レーダ装置30は、アンテナ32と、アンテナ32により電波を送受信するRF回路37と、RF回路37を制御するコントローラ40とを有し、アンテナ32は、可撓性フィルム基板33と、可撓性フィルム基板33に設けられた複数のアンテナ素子34とを有し、可撓性を有する平面アンテナとして構成されており、コントローラ40は、車両1の走行状態に応じて、アンテナ32の複数のアンテナ素子34のうち使用するアンテナ素子34を選択してアンテナ32により送信される電波のビームパターンを変更するようにRF回路37を制御する。
【選択図】図7
Description
このように構成された本発明によれば、アンテナを複数のアンテナエリアに分割することにより、仮想的に複数のサブアンテナを有する構成とすることができるため、走行状態に応じてアンテナエリア(サブアンテナ)を適宜に選択することにより、使用するアンテナ素子を選択することができる。
このように構成された本発明によれば、走行状態に応じてアンテナエリアを適宜に選択することにより、容易に所望のビームパターンに変更することができる。
このように構成された本発明によれば、フロントバンパ及びリヤバンパが、大きな表面積を有するため、大面積の可撓性アンテナを取付けることが可能であり、これにより、アンテナ性能を向上させることができる。
このように構成された本発明によれば、バンパ部材の幅方向及び鉛直方向にわたってアンテナを取付けることにより、全体としてアンテナの大面積化が容易であり、また、複数のアンテナエリアに分割しても、各アンテナエリアにおいても大きなアンテナ面積を確保することができる。これにより、アンテナ全体として良好なアンテナ性能を確保することができるのみならず、各アンテナエリアにおいても良好なアンテナ性能を確保することができる。
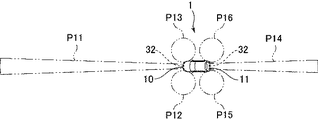
従来、レーダ装置の測定範囲は、車両から水平方向に延びており、車両近傍の路面を測定範囲として含んでいなかった。このため、車両の近傍に存在する溝や崖(段差)を検出することができなかった。しかしながら、本発明では、バンパ部材の側壁に設定されたアンテナエリアにより、車両の水平方向に存在する対象物を検知することができるだけでなく、バンパ部材の底壁に設定されたアンテナエリアにより、車両近傍の下方(即ち、路面)を測定範囲とすることができる。これにより、本発明では、溝や崖(段差)による車両トラブルの発生を回避可能となる。
このように構成された本発明によれば、車両の速度,進行方向,旋回方向,加減速に応じて、適切なビームパターンを設定することができる。
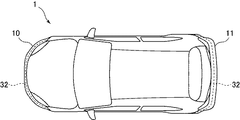
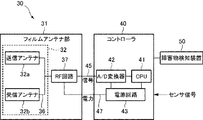
先ず、本発明の実施形態のレーダ装置を備えた車両の概略構成を図1〜図4を参照して説明する。図1は車両の説明図、図2はレーダ装置の電気ブロック図、図3はレーダ装置の説明図、図4はレーダ装置のフィルムアンテナ部の取付け状態を示す説明図である。
図1に示すように、車両1は、電波透過性を有する樹脂成形部品であるバンパ部材10,11(フロントバンパ10,リヤバンパ11)を備えており、各バンパ部材の内側にレーダ装置30のフィルムアンテナ部31が取り付けられている。
なお、RF回路37及びコントローラ40は、それぞれ単一パッケージの部品で構成してもよいが、アンテナ32を複数のエリアに分割して、それぞれのエリアごとにサブ回路部品(サブRF回路及びサブコントローラ)を設けて、複数のサブ回路部品(及びこれらを制御するメイン回路部品)により構成してもよい。
上記実施形態では、アンテナ32は、車両前後のバンパ部材10,11に配置されているが、図11に示すように、アンテナ32を、車両1のヘッドランプレンズ3,サイドミラーカバー4,サイドシルガーニッシュ5,ブレーキランプレンズ6に取付けてもよい。これらはすべて交換可能で電波透過性の樹脂成形部品である。ヘッドランプレンズ3からは測定範囲P51のビームパターンが形成され、サイドミラーカバー4からは測定範囲P52のビームパターンが形成され、サイドシルガーニッシュ5からは測定範囲P53のビームパターンが形成され、ブレーキランプレンズ6からは測定範囲P54のビームパターンが形成される。
2 リヤスポイラ
3 ヘッドランプレンズ
4 サイドミラーカバー
5 サイドシルガーニッシュ
6 ブレーキランプレンズ
9 段差,溝
10,11 バンパ部材(フロントバンパ10,リヤバンパ11)
12a 側壁
12b 天壁
12c 底壁
12d 角部
30 レーダ装置
31,131 フィルムアンテナ部
32,132 アンテナ
32a 送信アンテナ
32b 受信アンテナ
33 フィルム基板
34 アンテナ素子
35 グランド部
36 電気信号線
37,137 RF回路
37a ケース
40,140 コントローラ
41 プロセッサ部
42 A/D変換部
43 電源回路
45 電気信号線
47 電力供給線
50 障害物検知装置
60 塗装コーティング層
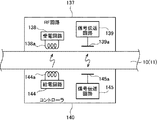
138 充電回路
138a 二次コイル
139 信号伝送回路
139a 電極
144 給電回路
144a 一次コイル
145 信号伝送回路
145a 電極
Claims (7)
- 対象物の検知を行うレーダ装置を備えた車両であって、
前記レーダ装置は、アンテナと、このアンテナにより電波を送受信する送受信回路と、この送受信回路を制御する制御回路と、を有し、
前記アンテナは、可撓性フィルムと、この可撓性フィルムに設けられた複数のアンテナ素子と、を有し、可撓性を有する平面アンテナとして構成されており、
前記制御回路は、前記車両の走行状態に応じて、前記アンテナの複数のアンテナ素子のうち使用するアンテナ素子を選択して前記アンテナにより送信される電波のビームパターンを変更するように前記送受信回路を制御することを特徴とするレーダ装置を備えた車両。 - 前記アンテナは、前記複数のアンテナ素子を複数のアンテナエリアに分割して使用可能に構成されており、
前記制御回路は、前記複数のアンテナエリアのうち、1又は2以上のアンテナエリアを選択し、選択されたアンテナエリアを使用して電波を送受信させるように前記送受信回路を制御することを特徴とする請求項1に記載のレーダ装置を備えた車両。 - 前記複数のアンテナエリアのうち、選択されるアンテナエリアを変更することにより、前記ビームパターンが変更されることを特徴とする請求項1又は2に記載のレーダ装置を備えた車両。
- 前記アンテナは、少なくとも前記車両のフロントバンパ及びリヤバンパの一方又は両方に取付けられていることを特徴とする請求項1〜3のいずれか1項に記載のレーダ装置を備えた車両。
- 前記アンテナは、前記車両のフロントバンパ又はリヤバンパの車幅方向及び鉛直方向にわたって取り付けられており、
前記複数のアンテナエリアは、少なくとも車幅方向又は鉛直方向に沿って分割して設定されていることを特徴とする請求項2〜4のいずれか1項に記載のレーダ装置を備えた車両。 - 前記アンテナは、前記車両のフロントバンパ又はリヤバンパの鉛直方向に延びる側壁及び車両下側に面して水平方向に延びる底壁に取付けられており、
前記複数のアンテナエリアは、前記側壁及び前記底壁にそれぞれ設定されていることを特徴とする請求項2〜5のいずれか1項に記載のレーダ装置を備えた車両。 - 前記制御回路は、前記車両の車速,ギヤ位置,ステアリングホイールの操舵角,ブレーキ操作の有無,アクセル開度の少なくとも1つに基づいて前記車両の走行状態を判断することを特徴とする請求項1〜6のいずれか1項に記載のレーダ装置を備えた車両。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016025583A JP6516160B2 (ja) | 2016-02-15 | 2016-02-15 | レーダ装置を備えた車両 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016025583A JP6516160B2 (ja) | 2016-02-15 | 2016-02-15 | レーダ装置を備えた車両 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017146100A true JP2017146100A (ja) | 2017-08-24 |
| JP6516160B2 JP6516160B2 (ja) | 2019-05-22 |
Family
ID=59682216
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016025583A Expired - Fee Related JP6516160B2 (ja) | 2016-02-15 | 2016-02-15 | レーダ装置を備えた車両 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6516160B2 (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110031845A (zh) * | 2018-01-10 | 2019-07-19 | 株式会社万都 | 控制雷达的设备和方法 |
| CN112740059A (zh) * | 2018-09-26 | 2021-04-30 | 京瓷株式会社 | 电子设备、电子设备的控制方法以及电子设备的控制程序 |
| JP2021085775A (ja) * | 2019-11-28 | 2021-06-03 | 日立Astemo株式会社 | ミリ波電波センサ及びこれを備えた車両 |
| WO2022055275A1 (ko) * | 2020-09-10 | 2022-03-17 | 삼성전자 주식회사 | 차량용 안테나 장치 및 그의 제어 방법 |
| WO2022075151A1 (ja) * | 2020-10-07 | 2022-04-14 | ソニーセミコンダクタソリューションズ株式会社 | レーダー装置及びレーダーシステム |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1027299A (ja) * | 1996-07-08 | 1998-01-27 | Matsushita Electric Ind Co Ltd | 車載用レーダ装置 |
| US6686867B1 (en) * | 1999-07-30 | 2004-02-03 | Volkswagen Ag | Radar sensor and radar antenna for monitoring the environment of a motor vehicle |
| JP2009069022A (ja) * | 2007-09-13 | 2009-04-02 | Panasonic Corp | レーダ装置、その制御方法及び車両 |
| JP2009182580A (ja) * | 2008-01-30 | 2009-08-13 | Panasonic Corp | アンテナ装置、監視装置、アンテナ装置の製造方法、プログラムおよび記録媒体 |
| JP2010071889A (ja) * | 2008-09-19 | 2010-04-02 | Toshiba Corp | 移動体搭載レーダ装置及びキャリブレーション方法 |
| JP2011140181A (ja) * | 2010-01-08 | 2011-07-21 | Marusan Kinzoku:Kk | 光輝性樹脂成形品及びその製造方法 |
| JP2011526370A (ja) * | 2008-07-02 | 2011-10-06 | アーデーツエー・オートモテイブ・デイスタンス・コントロール・システムズ・ゲゼルシヤフト・ミツト・ベシユレンクテル・ハフツング | 重なる送信アンテナ及び受信アンテナを有するレーダシステム |
| JP2014525031A (ja) * | 2011-07-05 | 2014-09-25 | ローベルト ボッシュ ゲゼルシャフト ミット ベシュレンクテル ハフツング | 自動車用のレーダシステム並びにレーダシステムを有する自動車 |
| JP2014529076A (ja) * | 2011-09-09 | 2014-10-30 | アスティックス ゲゼルシャフト ミット ベシュレンクテル ハフツング | アンテナ開口の合成的拡大と二次元ビーム・スイープをともなうイメージング・レーダセンサ |
| JP2014530343A (ja) * | 2011-09-09 | 2014-11-17 | アスティックス ゲゼルシャフト ミット ベシュレンクテル ハフツング | アンテナローブが狭く、かつ角度検出範囲が広いイメージング・レーダセンサ |
-
2016
- 2016-02-15 JP JP2016025583A patent/JP6516160B2/ja not_active Expired - Fee Related
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1027299A (ja) * | 1996-07-08 | 1998-01-27 | Matsushita Electric Ind Co Ltd | 車載用レーダ装置 |
| US6686867B1 (en) * | 1999-07-30 | 2004-02-03 | Volkswagen Ag | Radar sensor and radar antenna for monitoring the environment of a motor vehicle |
| JP2009069022A (ja) * | 2007-09-13 | 2009-04-02 | Panasonic Corp | レーダ装置、その制御方法及び車両 |
| JP2009182580A (ja) * | 2008-01-30 | 2009-08-13 | Panasonic Corp | アンテナ装置、監視装置、アンテナ装置の製造方法、プログラムおよび記録媒体 |
| JP2011526370A (ja) * | 2008-07-02 | 2011-10-06 | アーデーツエー・オートモテイブ・デイスタンス・コントロール・システムズ・ゲゼルシヤフト・ミツト・ベシユレンクテル・ハフツング | 重なる送信アンテナ及び受信アンテナを有するレーダシステム |
| JP2010071889A (ja) * | 2008-09-19 | 2010-04-02 | Toshiba Corp | 移動体搭載レーダ装置及びキャリブレーション方法 |
| JP2011140181A (ja) * | 2010-01-08 | 2011-07-21 | Marusan Kinzoku:Kk | 光輝性樹脂成形品及びその製造方法 |
| JP2014525031A (ja) * | 2011-07-05 | 2014-09-25 | ローベルト ボッシュ ゲゼルシャフト ミット ベシュレンクテル ハフツング | 自動車用のレーダシステム並びにレーダシステムを有する自動車 |
| JP2014529076A (ja) * | 2011-09-09 | 2014-10-30 | アスティックス ゲゼルシャフト ミット ベシュレンクテル ハフツング | アンテナ開口の合成的拡大と二次元ビーム・スイープをともなうイメージング・レーダセンサ |
| JP2014530343A (ja) * | 2011-09-09 | 2014-11-17 | アスティックス ゲゼルシャフト ミット ベシュレンクテル ハフツング | アンテナローブが狭く、かつ角度検出範囲が広いイメージング・レーダセンサ |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110031845A (zh) * | 2018-01-10 | 2019-07-19 | 株式会社万都 | 控制雷达的设备和方法 |
| US11733375B2 (en) | 2018-01-10 | 2023-08-22 | Hl Klemove Corp. | Apparatus and method for controlling radar |
| CN112740059A (zh) * | 2018-09-26 | 2021-04-30 | 京瓷株式会社 | 电子设备、电子设备的控制方法以及电子设备的控制程序 |
| JP2021085775A (ja) * | 2019-11-28 | 2021-06-03 | 日立Astemo株式会社 | ミリ波電波センサ及びこれを備えた車両 |
| WO2021106418A1 (ja) * | 2019-11-28 | 2021-06-03 | 日立Astemo株式会社 | ミリ波電波センサ及びこれを備えた車両 |
| DE112020004943T5 (de) | 2019-11-28 | 2022-08-11 | Hitachi Astemo, Ltd. | Millimeterfunkwellensensor und fahrzeug, das ihn enthält |
| JP7370829B2 (ja) | 2019-11-28 | 2023-10-30 | 日立Astemo株式会社 | ミリ波電波センサ及びこれを備えた車両 |
| WO2022055275A1 (ko) * | 2020-09-10 | 2022-03-17 | 삼성전자 주식회사 | 차량용 안테나 장치 및 그의 제어 방법 |
| WO2022075151A1 (ja) * | 2020-10-07 | 2022-04-14 | ソニーセミコンダクタソリューションズ株式会社 | レーダー装置及びレーダーシステム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6516160B2 (ja) | 2019-05-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6391047B2 (ja) | レーダ装置を備えた車両 | |
| JP6516160B2 (ja) | レーダ装置を備えた車両 | |
| US11733375B2 (en) | Apparatus and method for controlling radar | |
| JP6007449B2 (ja) | 自動車用レーダシステムおよびその使用方法 | |
| US7081847B2 (en) | Radar system with switchable angular resolution | |
| WO2006030832A1 (ja) | 監視装置 | |
| CN211741565U (zh) | 一种车辆雷达装置及其系统 | |
| KR20140014099A (ko) | 자동차용 레이더 센서 | |
| TW202030498A (zh) | 車用雷達裝置及其系統 | |
| GB2328748A (en) | Collision avoidance system with sensors mounted on flexible p.c.b. | |
| JP6604359B2 (ja) | 車載用アンテナ、それを備えた車載用レーダー装置、及び車載用アンテナの製造方法 | |
| KR102581461B1 (ko) | 레이더 모듈 및 이를 포함하는 차량용 레이더 장치 | |
| JP2011526677A (ja) | 車両用接近検知装置 | |
| EP4099500A1 (en) | Wave-shaped ground structure for antenna arrays | |
| KR20180124488A (ko) | 레이더 모듈 및 이를 포함하는 차량용 레이더 장치 | |
| EP3859374A1 (en) | Electronic device, electronic device control method, and electronic device control program | |
| EP4254006A1 (en) | Electronic device, method for controlling electronic device, and program | |
| EP4318022A1 (en) | Electronic device | |
| CN114649661B (zh) | 用于不对称覆盖的具有辐射槽和寄生元件的波导 | |
| US11226397B2 (en) | Slanted radomes | |
| JP2008126805A (ja) | タイヤ状態検出装置 | |
| KR20240024393A (ko) | 운전자 보조 장치 | |
| CN112601978A (zh) | 电子设备、电子设备的控制方法、以及电子设备的控制程序 | |
| JP2010204032A (ja) | 車両用レーダ装置 | |
| JP2008275483A (ja) | 物体検知装置、車両、ビームパターン生成方法、プログラム及び記録媒体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180219 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180221 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180405 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180820 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181018 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190322 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190404 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6516160 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |