JP2017106520A - 軸受装置及び回転支持装置 - Google Patents
軸受装置及び回転支持装置 Download PDFInfo
- Publication number
- JP2017106520A JP2017106520A JP2015239604A JP2015239604A JP2017106520A JP 2017106520 A JP2017106520 A JP 2017106520A JP 2015239604 A JP2015239604 A JP 2015239604A JP 2015239604 A JP2015239604 A JP 2015239604A JP 2017106520 A JP2017106520 A JP 2017106520A
- Authority
- JP
- Japan
- Prior art keywords
- bearing
- inner ring
- raceway
- ring
- outer ring
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Landscapes
- Support Of The Bearing (AREA)
- Mounting Of Bearings Or Others (AREA)
- Rolling Contact Bearings (AREA)
Abstract
【課題】複数の転がり軸受の軌道輪の低コスト化を実現しつつ、回転トルクの変動を効果的に抑制することができる軸受装置を提供する。
【解決手段】複数の転がり軸受20において、外輪13のアキシアル振れに対して、内輪14のアキシアル振れが小さくなるように、外輪13と内輪14とを組み合わせる。
【選択図】図2
【解決手段】複数の転がり軸受20において、外輪13のアキシアル振れに対して、内輪14のアキシアル振れが小さくなるように、外輪13と内輪14とを組み合わせる。
【選択図】図2
Description
本発明は、軸受装置及び回転支持装置に関し、より詳細には、軸受装置の回転トルクの変動を効果的に抑制することができる軸受装置及び回転支持装置に関する。
各種スピンドルやボールねじの支持、歯車装置などには、定位置予圧による予圧を付与した組合せアンギュラ玉軸受が一般的に使用される。定位置予圧の目的は、主にガタの防止、回転振れの抑制、剛性向上、玉のふらつきによる異音発生防止などである。
定位置予圧による予圧の付与方法としては、主に以下の方法がある。
1.内外輪の軸方向の出っ張り量(差幅)を予め調整した軸受を組合せ、軸方向に軸ナットやハウジングの蓋で締め切る。
2.外輪側のみに間座などを挟み、内輪同士の間には隙間を設けて軸受ナットで内輪を締め込む。
1.内外輪の軸方向の出っ張り量(差幅)を予め調整した軸受を組合せ、軸方向に軸ナットやハウジングの蓋で締め切る。
2.外輪側のみに間座などを挟み、内輪同士の間には隙間を設けて軸受ナットで内輪を締め込む。
例えば、上記2.の場合、内輪の締め込みにより軸受の予圧が増大し、軸受を回転させたときの摩擦トルク(回転トルク)も予圧の大きさに応じて増加する。この関係を利用して、軸受の摩擦トルクで予圧量を管理することもできる。
特許文献1では、一対の精密級の転がり軸受を用いて予圧を付与すると共に、向い合う内輪同士、及び外輪同士の軌道面のうねりに起因する楕円位相を、振れが抑制されるように組み合わせて、回転軸の軸方向の振れを抑制するようにした精密軸受スピンドル装置が開示されている。具体的には、外輪軌道及び内輪軌道のうねりに起因してこれら両軌道同士の間隔が狭くなる部分の回転方向に関する位相を互いに一致させた状態で配置して、内輪と外輪の相対回転に伴って生じる軸方向の振れを相殺させている。
軸受の回転トルクの大きさは、予圧の大きさに応じて増加する。このため、大きな剛性が必要とされる用途においては比較的大きな予圧が付与され、その場合、回転トルクも大きくなる。精度が低い(回転振れが大きい、寸法精度の公差が大きい)軸受の場合、予圧に対する回転トルクの絶対値がばらつくだけでなく、回転中に回転トルクが変動する、所謂、トルクむらが発生する。
このような軸受装置を駆動する駆動源(モータなど)の出力が、回転トルクに対し不十分であると、トルクむらにより円滑な回転が阻害される場合がある。また、駆動源にサーボモータなどを適用し、回転角度制御を行う装置(角度割り出し装置など)においては、トルクむらが制御の外乱要因ともなる。このため、上記のような用途においては、大きな定位置予圧を付与しつつトルクむらを抑制することが要求されている。特に、機械コストの関係で高精度の軸受(例えば、ISO規格5級以上)を適用せずに、トルクむらを効果的に最小化することが望まれている。
特許文献1に記載の技術では、回転軸(回転輪)の軸方向の振れを抑制可能であるが、トルク変動はむしろ大きくなる。特に、並級の転がり軸受を備える軸受装置においては、トルク変動の課題は顕著となる。
本発明は、前述した課題に鑑みてなされたものであり、その目的は、複数の転がり軸受の軌道輪の少なくとも一方に並級のものを用いて低コスト化を実現しつつ、回転トルクの変動を効果的に抑制することができる軸受装置を提供することにある。
本発明の上記目的は、下記の構成により達成される。
(1) 内周面に外輪軌道を有する外輪と、外周面に内輪軌道を有する内輪と、前記外輪軌道及び前記内輪軌道との間に転動自在に配置される複数の転動体と、を備え、定位置予圧による予圧が付与された、複数の転がり軸受が軸方向に組み合わされてなる軸受装置であって、
前記各転がり軸受では、前記外輪と前記内輪のいずれか一方の軌道輪のアキシアル振れに対して、他方の軌道輪のアキシアル振れは小さいことを特徴とする軸受装置。
(2) 前記他方の軌道輪は、前記一方の軌道輪よりも、JISの精度等級が高いことを特徴とする(1)に記載の軸受装置。
(3) 前記複数の転がり軸受全ての前記一方の軌道輪は、前記複数の転がり軸受全ての前記他方の軌道輪よりも、前記アキシアル振れが小さいことを特徴とする(1)又は(2)に記載の軸受装置。
(4) (1)〜(3)の軸受装置と、前記各内輪が嵌合される軸と、前記各外輪が嵌合されるハウジングと、を備えることを特徴とする回転支持装置。
(1) 内周面に外輪軌道を有する外輪と、外周面に内輪軌道を有する内輪と、前記外輪軌道及び前記内輪軌道との間に転動自在に配置される複数の転動体と、を備え、定位置予圧による予圧が付与された、複数の転がり軸受が軸方向に組み合わされてなる軸受装置であって、
前記各転がり軸受では、前記外輪と前記内輪のいずれか一方の軌道輪のアキシアル振れに対して、他方の軌道輪のアキシアル振れは小さいことを特徴とする軸受装置。
(2) 前記他方の軌道輪は、前記一方の軌道輪よりも、JISの精度等級が高いことを特徴とする(1)に記載の軸受装置。
(3) 前記複数の転がり軸受全ての前記一方の軌道輪は、前記複数の転がり軸受全ての前記他方の軌道輪よりも、前記アキシアル振れが小さいことを特徴とする(1)又は(2)に記載の軸受装置。
(4) (1)〜(3)の軸受装置と、前記各内輪が嵌合される軸と、前記各外輪が嵌合されるハウジングと、を備えることを特徴とする回転支持装置。
本発明の軸受装置によれば、各転がり軸受では、外輪と内輪のいずれか一方の軌道輪のアキシアル振れに対して、他方の軌道輪のアキシアル振れは小さいので、複数の転がり軸受の軌道輪の少なくとも一方に並級のものを用いて低コスト化を実現しつつ、定位置予圧下で局部的に転動体荷重が増大することを抑制し、軸受回転トルクの変動(トルクむら)を減少させることができる。
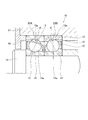
図1に示すように、本実施形態の軸受装置10は、2個のアンギュラ玉軸受である転がり軸受20(20A,20B)がハウジング11に内嵌し、回転軸12を回転自在に支承している。各転がり軸受20は、それぞれ、内周面に外輪軌道13aが形成された外輪13と、外周面に内輪軌道14aが形成された内輪14と、外輪軌道13aと内輪軌道14aとの間に、接触角αを持って転動自在に配設された転動体である複数の玉15と、玉15を均等に配置する保持器16と、を備える。また、これら転がり軸受20は、背面組合せで組み合わせた状態で、定位置予圧による予圧が付与されている。
このように構成される軸受装置10において、転がり軸受20を回転させたときに生じる軸受トルクは、個々の玉15と外輪軌道13a及び内輪軌道14aとの接触面の中での自転滑り(接触角を軸とした回転方向の滑り)による摩擦の総和である。回転に応じて玉15と外輪軌道13a及び内輪軌道14aとの接触状態が変化して、摩擦トルクの総和が変化するとき、転がり軸受20のトルクむらとして検出される。
従って、回転トルクの変動抑制は、回転に応じ変化する個々の玉15の摩擦トルクの総和の変動を抑えることで達成される。
なお、以下の説明においては、多くの用途で使用される外輪静止・内輪回転の転がり軸受20が、背面組合せされたものとして説明する。
なお、以下の説明においては、多くの用途で使用される外輪静止・内輪回転の転がり軸受20が、背面組合せされたものとして説明する。
自転滑りによる摩擦トルクMは、式(1)から求められる。
M=MS・Z・sinα (mN・m),{kgf・mm}・・・(1)
但し、
M:自転滑りによる摩擦トルク
MS=(3/8)・μ・Q・a・E(k) (mN・m),{kgf・mm}
μ:接触面の滑り摩擦係数
Q:転動体荷重(N){kgf}
a:接触楕円の長半径(mm)
E(k):k=√{1−(b/a)2}を母数とする第2種完全楕円積分
b:接触楕円の短半径(mm)
Z:玉の数
α:接触角(°)
但し、
M:自転滑りによる摩擦トルク
MS=(3/8)・μ・Q・a・E(k) (mN・m),{kgf・mm}
μ:接触面の滑り摩擦係数
Q:転動体荷重(N){kgf}
a:接触楕円の長半径(mm)
E(k):k=√{1−(b/a)2}を母数とする第2種完全楕円積分
b:接触楕円の短半径(mm)
Z:玉の数
α:接触角(°)
式(1)に示すように、自転滑りによる摩擦トルクMは、転動体荷重Qに比例する。また、予圧荷重により発生する転動体荷重Qは、式(2)により求められる。
Q=Fa/(Z・sinα) ・・・(2)
但し、
Q:転動体荷重
Fa:予圧荷重
Z:玉の数
α:荷重負荷時の接触角
但し、
Q:転動体荷重
Fa:予圧荷重
Z:玉の数
α:荷重負荷時の接触角
下記条件の軸受装置について、自転滑りによる摩擦トルクMを式(1)及び式(2)に基づいて試算する。
・軸受装置
軸受番号:7010AW
組合せ :2列背面組合せ
玉数 :1列当たり20個
予圧 :定位置予圧 隙間−20μm
軸受精度:内輪軌道面と側面との平行度(両列) 0μm、20μm、及び40μm
組合せ状態:内輪アキシアル振れの最大位置の位相を両列で合わせる。
・軸受装置
軸受番号:7010AW
組合せ :2列背面組合せ
玉数 :1列当たり20個
予圧 :定位置予圧 隙間−20μm
軸受精度:内輪軌道面と側面との平行度(両列) 0μm、20μm、及び40μm
組合せ状態:内輪アキシアル振れの最大位置の位相を両列で合わせる。
なお、定位置予圧は、アキシアル方向に付与されるため、軸受のアキシアル振れがトルク変動に密接に関係する。転がり軸受20の外輪アキシアル振れは、図3(a)に示すように、内輪14を固定して外輪13に錘1で測定荷重をかけながら回転させたとき、ダイアルゲージ2で測定される外輪側面13bの振れで規定され、振れが最も大きくなる位相を外輪アキシアル振れ最大位置と言う。また、転がり軸受20の内輪アキシアル振れは、図3(b)に示すように、外輪13を固定して内輪14に錘1で測定荷重をかけながら回転させたとき、ダイアルゲージ2で測定される内輪側面14bの振れで規定され、振れが最も大きくなる位相を内輪アキシアル振れ最大位置と言う。
軸受精度(みぞ平行度)0μm、20μm、及び40μmにおける軸受摩擦トルクの試算結果を表1に示す。また、軸受精度(みぞ平行度)20μmにおける玉ごとの摩擦トルクの比を表2に示す。なお、図4は、表2における玉数が20個の場合の各玉の位相を説明するための模式図であり、0度と180度には、玉が1つずつあり、0度と180度以外の位相では、玉が2個あることを表している。
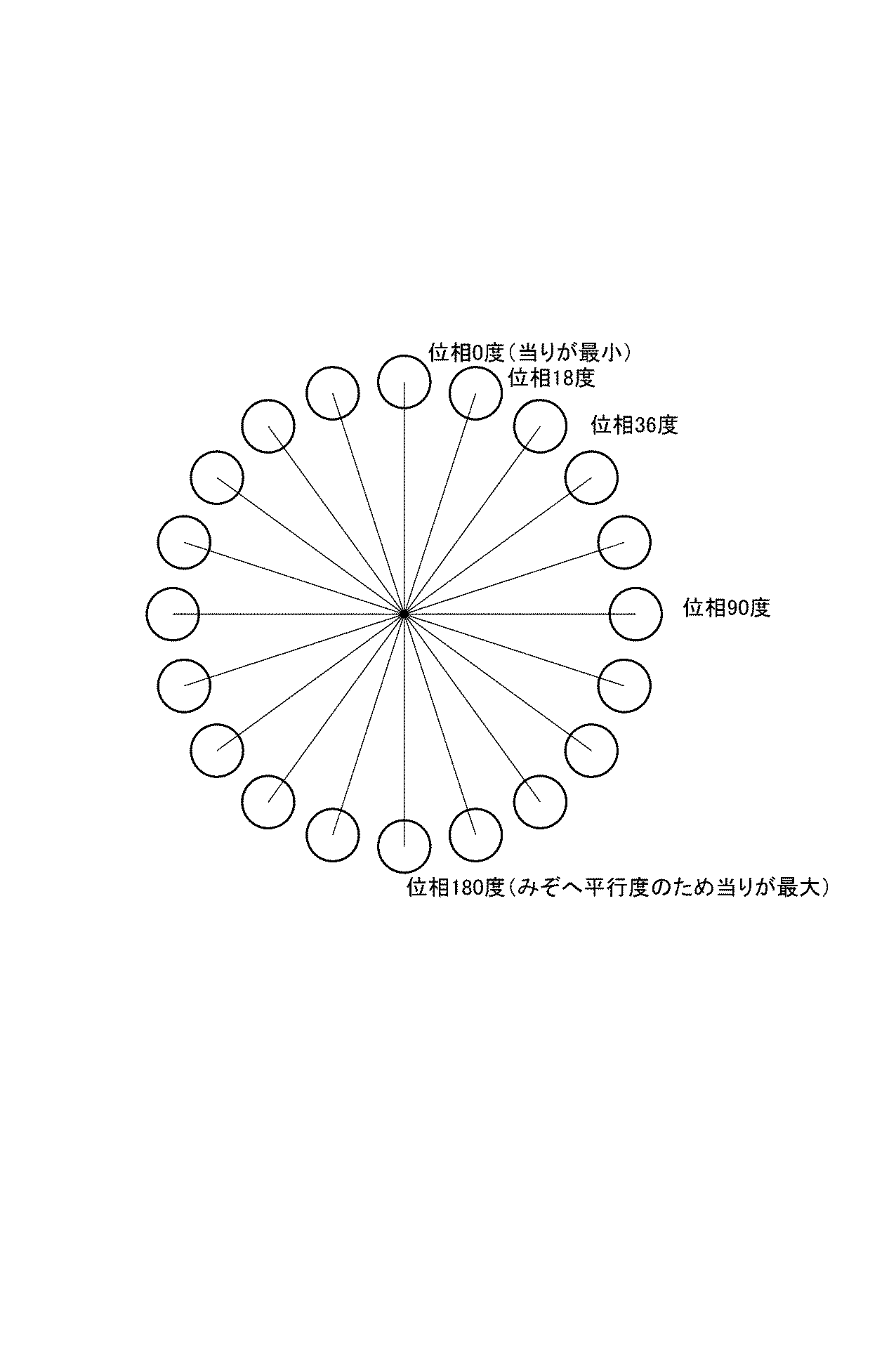
表1に示すように、内輪軌道面と側面との平行度(みぞ平行度)が大きいほど軸受摩擦トルクも大きくなる。
表2に示すように、このモデルにおいては、アキシアル振れ最大位置は、180°であり、この箇所での摩擦トルクが最大となる。
なお、軸受の予圧量と摩擦トルクとの関係は、図5に示すように2次関数で近似できる非線形であるため、玉の位相と摩擦トルクとは、非線形の関係にある。
なお、軸受の予圧量と摩擦トルクとの関係は、図5に示すように2次関数で近似できる非線形であるため、玉の位相と摩擦トルクとは、非線形の関係にある。
ここで、本実施形態では、図2に示すように、外輪と内輪のいずれか一方の軌道輪のアキシアル振れに対して、アキシアル振れが小さい、即ち、図2では、真円度が低い外輪13と、真円度が高い内輪14とを選択的に組み立てて転がり軸受20としている。なお、図中、各軌道面の楕円位相を点線で示している。
以下、外輪13及び内輪14の各軌道13a,14aを円周方向に展開した、図6に示す模式図を参照して詳細に説明する。
外輪軌道13a及び内輪軌道14aが共に楕円形状である場合に、転がり軸受20のアキシアル振れが生じ、この振れは、サインカーブ状になって1回転当たり2周期生じる。転がり軸受20のアキシアル振れは、各軌道13a,14aの2つのサインカーブの間に玉15が挟まれている状態で生じるので、2つの軌道13a,14aが最も近づく回転位相(図中Aで示す位相)のときに転動体荷重Qは極大値となり、他の位相にある玉15の依存度はそれほど大きくない。
外輪軌道13a及び内輪軌道14aが共に楕円形状である場合に、転がり軸受20のアキシアル振れが生じ、この振れは、サインカーブ状になって1回転当たり2周期生じる。転がり軸受20のアキシアル振れは、各軌道13a,14aの2つのサインカーブの間に玉15が挟まれている状態で生じるので、2つの軌道13a,14aが最も近づく回転位相(図中Aで示す位相)のときに転動体荷重Qは極大値となり、他の位相にある玉15の依存度はそれほど大きくない。
即ち、外輪軌道13aの振れが大きくとも、内輪軌道14aの振れが小さければ、玉15を介した振れの大きさは、振れが小さい内輪軌道14aに依存する。そして、図5に示すように、軸受予圧量と摩擦トルクの関係は2次関数で近似できるため、例えば、摩擦トルク変動を1/10にしたい場合には、振れが小さい方の内輪軌道14aの振れを(1/10)^0.5≒1/3.2にすればよく、また、摩擦トルク変動を1/100にしたい場合には、振れが小さい方の内輪軌道14aの振れを(1/100)^0.5≒1/10にすればよい。
なお、上記の関係は軌道面の振れの山数に対して玉数が十分に多いときほど顕著になる。軌道面の山数と玉数が近い場合は、玉の公転に伴い軌道面の山の頂上を玉が越えるたびに振れとして表れる。しかし、玉数が十分に多い場合は、軌道面の山の頂上付近に常に玉が存在するため、振れとして問題になり難い。軌道面の山の頂上を乗り越えることによる振れの変動と玉数には、式(3)の関係がある。
Z=180(deg)/sin(c)・・・(3)
但し、
c:振れの変動率(玉が軌道面の頂上を乗り越えることによる振れ/山の高さ)
Z:玉の数
但し、
c:振れの変動率(玉が軌道面の頂上を乗り越えることによる振れ/山の高さ)
Z:玉の数
振れの変動率と玉数との関係を表3及び図7に示す。表3及び図7に示すように、玉数が16個以上のとき、変動率は0.2以下となり、変動抑制の大きな効果が得られる。さらに好適には、玉数32個以上とすることで、変動率を0.1に低減することができる。
並級品の軌道輪の精度には、ばらつきがあるので、その中から真円度が比較的低い軌道輪と、真円度が高い軌道輪とを選択して組合せることは可能である。しかし、回転トルクむらに対する要求度は用途によって異なり、このような軌道輪の選択だけでは要求を満たせない場合がある。その際には、一方の軌道輪の精度は並級相当とし、他方の軌道輪のみ高精度に加工することで、回転トルクむらを要求水準に適合させることができる。
以上説明したように、本実施形態の軸受装置10によれば、複数の転がり軸受20は、外輪13のアキシアル振れに対して、内輪14のアキシアル振れを小さくしたので、複数の転がり軸受の軌道輪の低コスト化を実現、即ち、少なくとも一方の軌道輪は並級のものを使用しつつ、定位置予圧下で局部的に転動体荷重Qが増大することを抑制して軸受回転トルクの変動(トルクむら)を減少させることができる。
また、複数の転がり軸受20全ての内輪14は、複数の転がり軸受20全ての外輪13よりも、アキシアル振れが小さい、即ち、アキシアル振れが小さい方の軌道輪を統一することで、製造コストの点で有利となる。即ち、内輪14と外輪13は寸法や形状が異なるため、加工精度にも差異がある。そこで、加工精度を高め易い側の軌道輪のアキシアル振れを管理することが製造コスト上有利である。
ところで、外輪軌道13a及び内輪軌道14aの楕円状の真円度形状は旋削・熱処理・研削加工など軸受軌道輪の主な工程全てで発生し得る。特に薄肉タイプ(軸受外径と内径の差が小さく、リングの外径dに対し径方向の肉厚bが小さいもの)で発生し易いことが経験的に判明している。ISO規格に規定されている寸法系列0級か、それ以下のものであり、b/dが8%以下、特に5%以下のものが、これに相当する。
但し、運転中の軌道面の状態を考えると、軸受精度以外の要因で軌道面真円度が楕円状になることがある。軸受が嵌合される部分のハウジング内径面や軸外径面の真円度形状が楕円状の場合、軸受の外輪や内輪が嵌合によって変形する(いわゆる、周辺部品に倣う)ことで運転時に軌道面が楕円状になることがある。この場合には、ハウジングか、回転軸のいずれかを高精度に加工することで、軸受摩擦トルクの変動を抑制できる。
尚、本発明は、前述した実施形態に限定されるものではなく、適宜、変形、改良、等が可能である。
例えば、上記実施形態では、背面組合せされた一対のアンギュラ玉軸受について説明したが、本発明は、定位置予圧による予圧が付与された、複数の転がり軸受が軸方向に組み合わされてなるものであればよく、正面組合せされたアンギュラ玉軸受でも適用可能である。また、本発明の軸受装置は、一対の転がり軸受に限らず、3つ以上の転がり軸受が組み合わされてもよく、さらに、転がり軸受間に間座等が配置される構成であってもよい。さらに、回転振れに関する関係はころ軸受でも玉軸受と同様であり、特にアキシアル荷重を支持できる円すいころ軸受にも適用可能である。
例えば、上記実施形態では、背面組合せされた一対のアンギュラ玉軸受について説明したが、本発明は、定位置予圧による予圧が付与された、複数の転がり軸受が軸方向に組み合わされてなるものであればよく、正面組合せされたアンギュラ玉軸受でも適用可能である。また、本発明の軸受装置は、一対の転がり軸受に限らず、3つ以上の転がり軸受が組み合わされてもよく、さらに、転がり軸受間に間座等が配置される構成であってもよい。さらに、回転振れに関する関係はころ軸受でも玉軸受と同様であり、特にアキシアル荷重を支持できる円すいころ軸受にも適用可能である。
また、本実施形態では、一対の転がり軸受20の両方において、内輪軌道14aのアキシアル振れが外輪軌道13aのものに比べて小さいものを用いたが、本発明は、これに限定されるものではない。例えば、一方の転がり軸受20において、内輪軌道14aのアキシアル振れが外輪軌道13aのものに比べて小さく、他方の転がり軸受20において、外輪軌道13aのアキシアル振れが内輪軌道14aのものに比べて小さい構成であっても、本発明の効果を達成することができる。
10 軸受装置
13 外輪
13a 外輪軌道
14 内輪
14a 内輪軌道
15 玉(転動体)
16 保持器
20,20A,20B 転がり軸受
M 摩擦トルク
Q 転動体荷重
13 外輪
13a 外輪軌道
14 内輪
14a 内輪軌道
15 玉(転動体)
16 保持器
20,20A,20B 転がり軸受
M 摩擦トルク
Q 転動体荷重
Claims (4)
- 内周面に外輪軌道を有する外輪と、外周面に内輪軌道を有する内輪と、前記外輪軌道及び前記内輪軌道との間に転動自在に配置される複数の転動体と、を備え、定位置予圧による予圧が付与された、複数の転がり軸受が軸方向に組み合わされてなる軸受装置であって、
前記各転がり軸受では、前記外輪と前記内輪のいずれか一方の軌道輪のアキシアル振れに対して、他方の軌道輪のアキシアル振れは小さいことを特徴とする軸受装置。 - 前記他方の軌道輪は、前記一方の軌道輪よりも、JISの精度等級が高いことを特徴とする請求項1に記載の軸受装置。
- 前記複数の転がり軸受全ての前記一方の軌道輪は、前記複数の転がり軸受全ての前記他方の軌道輪よりも、前記アキシアル振れが小さいことを特徴とする請求項1又は2に記載の軸受装置。
- 請求項1〜3のいずれか1項に記載の軸受装置と、前記各内輪が嵌合される軸と、前記各外輪が嵌合されるハウジングと、を備えることを特徴とする回転支持装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015239604A JP2017106520A (ja) | 2015-12-08 | 2015-12-08 | 軸受装置及び回転支持装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015239604A JP2017106520A (ja) | 2015-12-08 | 2015-12-08 | 軸受装置及び回転支持装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017106520A true JP2017106520A (ja) | 2017-06-15 |
Family
ID=59059353
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015239604A Pending JP2017106520A (ja) | 2015-12-08 | 2015-12-08 | 軸受装置及び回転支持装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2017106520A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019132311A (ja) * | 2018-01-30 | 2019-08-08 | 日本精工株式会社 | 玉軸受 |
| JP2021051054A (ja) * | 2019-09-26 | 2021-04-01 | Ntn株式会社 | 車輪用軸受装置の予圧検査方法 |
-
2015
- 2015-12-08 JP JP2015239604A patent/JP2017106520A/ja active Pending
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019132311A (ja) * | 2018-01-30 | 2019-08-08 | 日本精工株式会社 | 玉軸受 |
| WO2019151306A1 (ja) * | 2018-01-30 | 2019-08-08 | 日本精工株式会社 | 玉軸受 |
| JP2021051054A (ja) * | 2019-09-26 | 2021-04-01 | Ntn株式会社 | 車輪用軸受装置の予圧検査方法 |
| JP7049297B2 (ja) | 2019-09-26 | 2022-04-06 | Ntn株式会社 | 車輪用軸受装置の予圧検査方法 |
| US11874195B2 (en) | 2019-09-26 | 2024-01-16 | Ntn Corporation | Preload inspection method for bearing device for vehicle wheel |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5750901B2 (ja) | 転がり軸受 | |
| US9422977B2 (en) | Bearing mechanism | |
| JP3207410U (ja) | 転がり軸受 | |
| JP3658994B2 (ja) | 予圧を付与された複列転がり軸受装置の製造方法 | |
| JP2009061571A (ja) | 工作機械主軸用スピンドル装置 | |
| JP2017106520A (ja) | 軸受装置及び回転支持装置 | |
| JP2013194886A (ja) | 軸受装置及び回転体 | |
| JP5601091B2 (ja) | 工作機械のスピンドル装置 | |
| JP5704213B2 (ja) | 軸受装置 | |
| JP5453764B2 (ja) | 軸受装置及びその組立方法 | |
| JP2008019943A (ja) | 組合せ軸受 | |
| JP4743176B2 (ja) | 組合せ玉軸受及び複列玉軸受 | |
| JP2006105384A (ja) | 複列玉軸受 | |
| JP2003299299A (ja) | ダイレクトドライブモータのロータ支持構造 | |
| JP2017106519A (ja) | 軸受装置及び回転支持装置 | |
| JP4715961B2 (ja) | 工作機械の回転テーブル装置 | |
| JP6602459B2 (ja) | 複列円筒コロ軸受 | |
| JP5778517B2 (ja) | スラスト軸受 | |
| JP2009008211A (ja) | ころ軸受・軸受箱組立体 | |
| JP2006153094A (ja) | 玉軸受及び該玉軸受を用いた工作機械の回転テーブル装置 | |
| JP2006177504A (ja) | ダイレクトドライブモータ | |
| JP6186833B2 (ja) | シールリング付転がり軸受 | |
| JPH01135916A (ja) | 予圧調整式スビンドルユニット | |
| JP2019173888A (ja) | アンギュラ玉軸受 | |
| JP2006077814A (ja) | 工作機械の主軸用回転支持装置 |