JP2017100632A - 車両用制御装置 - Google Patents
車両用制御装置 Download PDFInfo
- Publication number
- JP2017100632A JP2017100632A JP2015236988A JP2015236988A JP2017100632A JP 2017100632 A JP2017100632 A JP 2017100632A JP 2015236988 A JP2015236988 A JP 2015236988A JP 2015236988 A JP2015236988 A JP 2015236988A JP 2017100632 A JP2017100632 A JP 2017100632A
- Authority
- JP
- Japan
- Prior art keywords
- function
- engine
- control device
- vehicle
- ecu
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images


Landscapes
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Output Control And Ontrol Of Special Type Engine (AREA)
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
Abstract
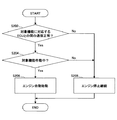
【解決手段】アイドリングストップ機能を制御する第1制御装置と、バッテリ電力で作動するアクチュエータを作動制御することで、対象機能(駐車支援機能、車高調整機能、又は減衰力調整機能)を実現すると共に、対象機能の作動状況を第1制御装置に送信する第2制御装置を備え、制御装置間の通信状態が異常である場合、第1制御装置は、対象機能の作動状況に関わらずエンジンの自動停止を許可すると共に、始動条件が成立しない限り、自動停止されているエンジンの自動停止を継続させ、第2制御装置は、対象機能の作動を禁止する。
【選択図】図2
Description
前記エンジンを始動させるスタータと、
前記スタータに駆動電力を供給するバッテリと、
所定の停止条件が成立した場合、前記エンジンを自動停止させ、所定の始動条件が成立した場合、前記スタータを駆動して前記エンジンを自動始動させる第1制御装置と、
前記バッテリからの電力で作動するアクチュエータであって、パワーステアリング装置のアシストモータであるアクチュエータ、アブソーバのシリンダ内の圧力を調整するアクチュエータ、又はアブソーバのシリンダ内のピストンロッドにより隔離される2つの油室間での作動油の移動流量を調整するアクチュエータを作動制御することにより、前記車両の目標駐車位置への操舵操作を支援する駐車支援機能、前記車両の車高を調整する車高調整機能、又は前記アブソーバの減衰力を調整する減衰力調整機能を実現すると共に、前記駐車支援機能、前記車高調整機能、又は前記減衰力調整機能の作動状況を前記第1制御装置に送信する第2制御装置を備え、
前記第1制御装置は、前記第2制御装置との間の通信状態が正常である場合、前記駐車支援機能、前記車高調整機能、又は前記減衰力調整機能が作動しているとき、前記エンジンの自動停止を禁止すると共に、自動停止されている前記エンジンを自動始動させ、前記第2制御装置との間の通信状態が異常である場合、前記駐車支援機能、前記車高調整機能、又は前記減衰力調整機能の作動状況に関わらず、前記エンジンの自動停止を許可すると共に、前記始動条件が成立しない限り、自動停止されている前記エンジンの自動停止を継続させ、
前記第2制御装置は、前記第1制御装置との間の通信状態が異常である場合、前記駐車支援機能、前記車高調整機能、又は前記減衰力調整機能の作動を禁止する、
車両用制御システムが提供される。
10 エンジン
20 スタータ
20r スタータリレー
30 バッテリ
40 エンジンECU
50 エコランECU(第1制御装置)
60 ECU(第2制御装置)
70 アクチュエータ
80 バス
Claims (1)
- 車両の駆動力源であるエンジンと、
前記エンジンを始動させるスタータと、
前記スタータに駆動電力を供給するバッテリと、
所定の停止条件が成立した場合、前記エンジンを自動停止させ、所定の始動条件が成立した場合、前記スタータを駆動して前記エンジンを自動始動させる第1制御装置と、
前記バッテリからの電力で作動するアクチュエータであって、パワーステアリング装置のアシストモータであるアクチュエータ、アブソーバのシリンダ内の圧力を調整するアクチュエータ、又はアブソーバのシリンダ内のピストンロッドにより隔離される2つの油室間での作動油の移動流量を調整するアクチュエータを作動制御することにより、前記車両の目標駐車位置への操舵操作を支援する駐車支援機能、前記車両の車高を調整する車高調整機能、又は前記アブソーバの減衰力を調整する減衰力調整機能を実現すると共に、前記駐車支援機能、前記車高調整機能、又は前記減衰力調整機能の作動状況を前記第1制御装置に送信する第2制御装置を備え、
前記第1制御装置は、前記第2制御装置との間の通信状態が正常である場合、前記駐車支援機能、前記車高調整機能、又は前記減衰力調整機能が作動しているとき、前記エンジンの自動停止を禁止すると共に、自動停止されている前記エンジンを自動始動させ、前記第2制御装置との間の通信状態が異常である場合、前記駐車支援機能、前記車高調整機能、又は前記減衰力調整機能の作動状況に関わらず、前記エンジンの自動停止を許可すると共に、前記始動条件が成立しない限り、自動停止されている前記エンジンの自動停止を継続させ、
前記第2制御装置は、前記第1制御装置との間の通信状態が異常である場合、前記駐車支援機能、前記車高調整機能、又は前記減衰力調整機能の作動を禁止する、
車両用制御システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015236988A JP6528661B2 (ja) | 2015-12-03 | 2015-12-03 | 車両用制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015236988A JP6528661B2 (ja) | 2015-12-03 | 2015-12-03 | 車両用制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017100632A true JP2017100632A (ja) | 2017-06-08 |
| JP6528661B2 JP6528661B2 (ja) | 2019-06-12 |
Family
ID=59015952
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015236988A Expired - Fee Related JP6528661B2 (ja) | 2015-12-03 | 2015-12-03 | 車両用制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6528661B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112109690A (zh) * | 2019-07-17 | 2020-12-22 | 上汽通用五菱汽车股份有限公司 | 自动驻车控制方法、装置及计算机可读存储介质 |
| WO2024150384A1 (ja) * | 2023-01-12 | 2024-07-18 | 本田技研工業株式会社 | 車両の制御装置 |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003267022A (ja) * | 2002-03-18 | 2003-09-25 | Toyota Motor Corp | 車高調整装置 |
| JP2005170111A (ja) * | 2003-12-08 | 2005-06-30 | Sumitomo Electric Ind Ltd | 電動制御システム及び電力分配器 |
| JP2006122567A (ja) * | 2004-11-01 | 2006-05-18 | Isuzu Motors Ltd | 車両用の車椅子リフト装置 |
| JP2006329122A (ja) * | 2005-05-27 | 2006-12-07 | Fujitsu Ten Ltd | エンジン自動停止始動装置および方法、ならびにエンジン制御システム |
| JP2010228591A (ja) * | 2009-03-27 | 2010-10-14 | Bosch Corp | 駐車支援制御装置及び方法 |
| JP2012107580A (ja) * | 2010-11-18 | 2012-06-07 | Toyota Motor Corp | 車両内燃機関の制御装置。 |
| JP2013083163A (ja) * | 2011-10-06 | 2013-05-09 | Toyota Motor Corp | 福祉車両の内燃機関制御装置 |
| JP2014199057A (ja) * | 2014-06-27 | 2014-10-23 | トヨタ自動車株式会社 | 車両の制御装置 |
| JP2014208500A (ja) * | 2013-04-16 | 2014-11-06 | トヨタ自動車株式会社 | 車両の制御装置 |
-
2015
- 2015-12-03 JP JP2015236988A patent/JP6528661B2/ja not_active Expired - Fee Related
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003267022A (ja) * | 2002-03-18 | 2003-09-25 | Toyota Motor Corp | 車高調整装置 |
| JP2005170111A (ja) * | 2003-12-08 | 2005-06-30 | Sumitomo Electric Ind Ltd | 電動制御システム及び電力分配器 |
| JP2006122567A (ja) * | 2004-11-01 | 2006-05-18 | Isuzu Motors Ltd | 車両用の車椅子リフト装置 |
| JP2006329122A (ja) * | 2005-05-27 | 2006-12-07 | Fujitsu Ten Ltd | エンジン自動停止始動装置および方法、ならびにエンジン制御システム |
| JP2010228591A (ja) * | 2009-03-27 | 2010-10-14 | Bosch Corp | 駐車支援制御装置及び方法 |
| JP2012107580A (ja) * | 2010-11-18 | 2012-06-07 | Toyota Motor Corp | 車両内燃機関の制御装置。 |
| JP2013083163A (ja) * | 2011-10-06 | 2013-05-09 | Toyota Motor Corp | 福祉車両の内燃機関制御装置 |
| JP2014208500A (ja) * | 2013-04-16 | 2014-11-06 | トヨタ自動車株式会社 | 車両の制御装置 |
| JP2014199057A (ja) * | 2014-06-27 | 2014-10-23 | トヨタ自動車株式会社 | 車両の制御装置 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112109690A (zh) * | 2019-07-17 | 2020-12-22 | 上汽通用五菱汽车股份有限公司 | 自动驻车控制方法、装置及计算机可读存储介质 |
| WO2024150384A1 (ja) * | 2023-01-12 | 2024-07-18 | 本田技研工業株式会社 | 車両の制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6528661B2 (ja) | 2019-06-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6455486B2 (ja) | 電源システム | |
| US9511766B2 (en) | Inter-vehicle control apparatus | |
| JP5999074B2 (ja) | 車両用制御装置、エンジン制御方法 | |
| JP5736705B2 (ja) | 車両の制御装置及び車両の制御方法 | |
| WO2014102884A1 (ja) | 車両の制御装置 | |
| KR20160072219A (ko) | 차량용 제어 장치 및 그 제어 방법 | |
| JP2005271640A (ja) | 車両のパワーステアリング装置 | |
| JP2014173454A (ja) | アイドルストップ車の制御装置 | |
| JP2018008544A (ja) | ハイブリッド車両 | |
| JP6528661B2 (ja) | 車両用制御装置 | |
| US11325580B2 (en) | Hybrid vehicle transmission control using driver statistics | |
| JP6582697B2 (ja) | 制御システム | |
| EP2781436B1 (en) | Power steering device of vehicle | |
| US9821811B2 (en) | Idling stop control device | |
| US9523337B2 (en) | Idling stop control device | |
| JP2014172456A (ja) | アイドルストップ車の制御装置 | |
| JP2010537118A (ja) | 自動車両の内燃機関の一時的なトルクリザーブを見越した方法および車載電源網 | |
| CN106314323B (zh) | 基于ecu和acc的联合驾驶控制方法及系统 | |
| JP6311517B2 (ja) | 車両用制御装置 | |
| CA2877107C (en) | Engine-mounted controller, and vehicle | |
| JP7114171B2 (ja) | 車両制御装置 | |
| JP2013133719A (ja) | 車両用制御装置 | |
| JP2017177861A (ja) | 車両用制御装置 | |
| JP2017159819A (ja) | 車両用制御装置 | |
| JP2016022802A (ja) | 車両用制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180111 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180928 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20181009 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181126 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190416 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190429 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6528661 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |