JP2017007603A - 運転支援制御装置 - Google Patents
運転支援制御装置 Download PDFInfo
- Publication number
- JP2017007603A JP2017007603A JP2015127878A JP2015127878A JP2017007603A JP 2017007603 A JP2017007603 A JP 2017007603A JP 2015127878 A JP2015127878 A JP 2015127878A JP 2015127878 A JP2015127878 A JP 2015127878A JP 2017007603 A JP2017007603 A JP 2017007603A
- Authority
- JP
- Japan
- Prior art keywords
- information
- vehicle
- flying object
- flying
- acquisition unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images









Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T50/00—Aeronautics or air transport
- Y02T50/60—Efficient propulsion technologies, e.g. for aircraft
Landscapes
- Closed-Circuit Television Systems (AREA)
- Traffic Control Systems (AREA)
Abstract
【課題】飛行体の電動駆動源の電源の電力残量を考慮して飛行体を車両に帰還させる。
【解決手段】本発明に係る運転支援制御装置1は、車両2と離間して飛行可能な無人の飛行体3が有する回転翼31を回転駆動させる電動駆動源30の電源32の電力残量(F)を取得する電力残量取得部33と、電源に対して負荷となる負荷情報(H)を取得する負荷情報取得部(80)と、負荷情報取得部から得られる負荷情報(H)に基づき、目標予備電力残量(Fa)を取得する目標電力残量取得部(81)と、目標電力残量取得部で取得した目標予備電力残量(Fa)よりも電力残量(F)が少ない場合には、飛行体が車両に帰還するように飛行体の飛行状態を制御する制御部を有する。
【選択図】図8
【解決手段】本発明に係る運転支援制御装置1は、車両2と離間して飛行可能な無人の飛行体3が有する回転翼31を回転駆動させる電動駆動源30の電源32の電力残量(F)を取得する電力残量取得部33と、電源に対して負荷となる負荷情報(H)を取得する負荷情報取得部(80)と、負荷情報取得部から得られる負荷情報(H)に基づき、目標予備電力残量(Fa)を取得する目標電力残量取得部(81)と、目標電力残量取得部で取得した目標予備電力残量(Fa)よりも電力残量(F)が少ない場合には、飛行体が車両に帰還するように飛行体の飛行状態を制御する制御部を有する。
【選択図】図8
Description
本発明は、無人の飛行体を用いた運転支援制御装置に関する。
ビデオカメラなどの撮像装置が搭載された無人の飛行体を車両から離間して飛行させ、飛行体の撮像装置が撮像した画像を車両に送信して乗員に提示する運転支援装置が知られている(特許文献1)。
特許文献1に記載の運転支援装置では、飛行体の電動駆動源の電源の電力残量を考慮して飛行体を車両に帰還させることについては、言及されていない。
本発明は、飛行体の電動駆動源の電源の電力残量を考慮して飛行体を車両に帰還させることを、その目的とする。
本発明は、飛行体の電動駆動源の電源の電力残量を考慮して飛行体を車両に帰還させることを、その目的とする。
上記目的を達成するため、本発明に係る運転支援制御装置は、車両と離間して飛行可能な無人の飛行体が有する回転翼を回転駆動させる電動駆動源の電源の電力残量を取得する電力残量取得部と、電源に対して負荷となる負荷情報を取得する負荷情報取得部と、負荷情報取得部から得られる負荷情報に基づき、目標予備電力残量を取得する目標電力残量取得部と、目標電力残量取得部で取得した目標予備電力残量よりも電力残量が少ない場合には、飛行体が車両に帰還するように、飛行体の飛行状態を制御する制御部を有することを特徴としている。
本発明によれば、電源に対する負荷情報に基づき求められた目標予備電力残量よりも電源の電力残量が少ない場合、飛行体が車両に帰還するように制御部で飛行体の飛行状態を制御するので、飛行体の駆動源となる電源の電力残量を考慮して飛行体を車両に帰還させることができる。
以下、本発明の実施形態について図面を用いて説明する。実施形態において、同一部材や同一機能を有する部材には、同一の符号を付し、重複説明は適宜省略する。なお、図面の見やすさを考慮して、構成要件を部分的に省略して記載することもある。
本発明に係る運転支援制御装置は、無人の飛行体を車両に確実に帰還させるために、飛行体の電動駆動源の電源の電力残量が、電源に対する負荷情報に基づき求められた目標予備電力残量よりも少ない場合、飛行体を車両に帰還するように制御部で飛行体の飛行状態を制御するようにしたものである。
(概略)
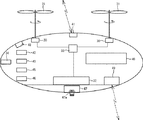
本実施形態に係る運転支援制御装置1は、図1(a)、図1(b)に示すように、車両(以下「自車両」と記す)2と離間して飛行可能な飛行体3が撮像した画像の情報を、自車両2を運転する運転者に文字や画像として提示することで、運転者の状況判断をサポートして運転支援するものである。
自車両2は、道路5の走行レーン6を走行するものである。道路5には、自動車専用道や一般道が含まれる。飛行体3は、自車両2と離間して飛行することで自車両2の周囲の状況を車両上方から空撮し、空撮した画像情報Gを自車両2に送信する機能を備えている。自車両2は、飛行体3から送信された画像情報Gを運転者に提示する機能と、飛行体3の飛行状態を制御する制御指示を行う機能を備えている。符号7は道路5の中央線を示し、符号8は反対車線の走行レーンを示す。
本発明に係る運転支援制御装置は、無人の飛行体を車両に確実に帰還させるために、飛行体の電動駆動源の電源の電力残量が、電源に対する負荷情報に基づき求められた目標予備電力残量よりも少ない場合、飛行体を車両に帰還するように制御部で飛行体の飛行状態を制御するようにしたものである。
(概略)
本実施形態に係る運転支援制御装置1は、図1(a)、図1(b)に示すように、車両(以下「自車両」と記す)2と離間して飛行可能な飛行体3が撮像した画像の情報を、自車両2を運転する運転者に文字や画像として提示することで、運転者の状況判断をサポートして運転支援するものである。
自車両2は、道路5の走行レーン6を走行するものである。道路5には、自動車専用道や一般道が含まれる。飛行体3は、自車両2と離間して飛行することで自車両2の周囲の状況を車両上方から空撮し、空撮した画像情報Gを自車両2に送信する機能を備えている。自車両2は、飛行体3から送信された画像情報Gを運転者に提示する機能と、飛行体3の飛行状態を制御する制御指示を行う機能を備えている。符号7は道路5の中央線を示し、符号8は反対車線の走行レーンを示す。
実施形態においては、特段の説明が無い限り、飛行体3は、運転支援をする際に自車両2よりも前方の走行レーン6上を飛行するものとする。なお、走行レーン6には、外灯、案内表示板、信号機、各種計測器を支持する支柱、歩道橋、鉄道などの高架橋などが適宜設置されている。これら設置物の最大高さは、それぞれ法規、規格で定められているので、予めこれら設置物の最大高さを取得しておく。そして飛行体3の飛行高度は、これら設置物の最大高さよりも低い高度、あるいは高い高度を原則飛行するものとする。また、道路5がトンネル内を通過する場合もある。この場合でもトンネルの最大坑内高さを事前に取得しておき、飛行体3の飛行高度が最大坑内高さよりも低い高度で飛行するものとする。つまり、飛行体3は、設置物やトンネル等と衝突しない飛行高度で飛行するものとする。
運転支援制御装置1は、飛行体3に搭載された機体側制御部40と、自車両2に搭載された車両側制御部50を有している。機体側制御部40と車両側制御部50は、制御部4を構成していて、これらが互いに通信して各種情報を送受信することで、運転支援と飛行体3の離陸と自車両2への帰還を制御する。
運転支援制御装置1は、飛行体3に搭載された機体側制御部40と、自車両2に搭載された車両側制御部50を有している。機体側制御部40と車両側制御部50は、制御部4を構成していて、これらが互いに通信して各種情報を送受信することで、運転支援と飛行体3の離陸と自車両2への帰還を制御する。
(飛行体の構成)
図2に示すように、飛行体3は、遠隔操作による飛行指示や自律制御によって自律飛行可能な無人の飛行体である。飛行体3は、いわゆるMAV(Micro Air Vehicle)と呼ばれる小型で無人の飛行機である。飛行体3は、自車両2に搭載されていて、自車両2に設けられた離着陸部20(図1参照)から離陸するとともに、離着陸部20へ着陸する。飛行体3は、自車両2を運転する運転者への運転支援がなされる場合には、自車両2から離陸して飛行し、その他の場合には自車両2に格納されている。
飛行体3としては、例えばティルトローター型の構造を有する機体や、クアッドローター型の構造を有する機体が挙げられる。飛行体3は、ティルトローター型の構造を有する機体である場合、離着陸時および一定高度で停止するホバリング時には回転翼を上方に向けることで揚力を得て、巡航飛行時には回転翼を横向きに傾けることで推進力を得る。飛行体3は、クアッドローター型の構造を有する機体である場合、複数の回転翼の各々の傾斜角を個別に制御したり、複数の回転翼の各々の出力を個別に制御したりすることによって、揚力および推進力を得る。
図2に示すように、飛行体3は、遠隔操作による飛行指示や自律制御によって自律飛行可能な無人の飛行体である。飛行体3は、いわゆるMAV(Micro Air Vehicle)と呼ばれる小型で無人の飛行機である。飛行体3は、自車両2に搭載されていて、自車両2に設けられた離着陸部20(図1参照)から離陸するとともに、離着陸部20へ着陸する。飛行体3は、自車両2を運転する運転者への運転支援がなされる場合には、自車両2から離陸して飛行し、その他の場合には自車両2に格納されている。
飛行体3としては、例えばティルトローター型の構造を有する機体や、クアッドローター型の構造を有する機体が挙げられる。飛行体3は、ティルトローター型の構造を有する機体である場合、離着陸時および一定高度で停止するホバリング時には回転翼を上方に向けることで揚力を得て、巡航飛行時には回転翼を横向きに傾けることで推進力を得る。飛行体3は、クアッドローター型の構造を有する機体である場合、複数の回転翼の各々の傾斜角を個別に制御したり、複数の回転翼の各々の出力を個別に制御したりすることによって、揚力および推進力を得る。
このような飛行体3は、電動駆動源となる駆動モータ30と、駆動モータ30によって回転駆動される回転翼31と、駆動モータ30へ電力を供給する電源となるバッテリー32を有している。
本実施形態において、飛行体3は、電動のクアッドローター型の機体であり、複数の回転翼31と、各回転翼31を個別に回転駆動する複数の駆動モータ30を有するものとする。そして、各駆動モータ30をそれぞれ制御して各回転翼31の回転数を調整することで、前後方向への飛行(前進と後進)、左右方向への飛行(左右旋回)、飛行速度(対気速度)、飛行高度、ホバリングなどの飛行状態が制御可能とされている。バッテリー32は、充電可能なものである。バッテリー32は1つあるいは複数個を搭載しても良い。複数個のバッテリー32を搭載する場合、電力容量が多くなるので、飛行距離を延長することができるので好ましい。
本実施形態において、飛行体3は、電動のクアッドローター型の機体であり、複数の回転翼31と、各回転翼31を個別に回転駆動する複数の駆動モータ30を有するものとする。そして、各駆動モータ30をそれぞれ制御して各回転翼31の回転数を調整することで、前後方向への飛行(前進と後進)、左右方向への飛行(左右旋回)、飛行速度(対気速度)、飛行高度、ホバリングなどの飛行状態が制御可能とされている。バッテリー32は、充電可能なものである。バッテリー32は1つあるいは複数個を搭載しても良い。複数個のバッテリー32を搭載する場合、電力容量が多くなるので、飛行距離を延長することができるので好ましい。
飛行体3は、駆動モータ30、回転翼31、バッテリー32、電圧計33、温度計34、機体側制御部40、GPS受信機41、磁気方位計42、角速度計43、高度計45、飛行速度計46、機体カメラ47、天候情報取得部48及び無線送受信機49を有している。
図3に示すように、機体側制御部40は、中央演算部としてのCPU(Central Processing Unit)、記憶部としてのROM(Read Only Memory)とRAM(Random Access Memory)および入出力インターフェイスなどを備えて構成されたコンピュータである。機体側制御部40には、駆動モータ30、バッテリー32、電力残量取得部33、温度計34、天候情報取得部35、GPS受信機41、磁気方位計42、角速度計43、高度計45、飛行速度計46、機体カメラ47、レインセンサ48及び無線送受信機49が信号線を介して接続されている。
図3に示すように、機体側制御部40は、中央演算部としてのCPU(Central Processing Unit)、記憶部としてのROM(Read Only Memory)とRAM(Random Access Memory)および入出力インターフェイスなどを備えて構成されたコンピュータである。機体側制御部40には、駆動モータ30、バッテリー32、電力残量取得部33、温度計34、天候情報取得部35、GPS受信機41、磁気方位計42、角速度計43、高度計45、飛行速度計46、機体カメラ47、レインセンサ48及び無線送受信機49が信号線を介して接続されている。
電力残量取得部33は、バッテリー32の電圧を計測し、電圧から電力残量を推定して取得するものである。電力残量取得部33は、推定した電力残量を示す情報である電力残量情報(F)を機体側制御部40に送信する。
温度計34は温度情報取得部であり、飛行体3が飛行している領域となる上空の大気温度(外気温度)を計測するものである。温度計34は、温度を示す情報である温度情報(T)を機体側制御部40に送信する。温度情報(T)は、電源に対する負荷情報の1つである。
温度計34によって計測する領域の温度は、上空の大気温度ではなく、飛行している飛行体3のバッテリー32の温度、飛行している飛行体3の機内の温度であっても良い。
温度計34は温度情報取得部であり、飛行体3が飛行している領域となる上空の大気温度(外気温度)を計測するものである。温度計34は、温度を示す情報である温度情報(T)を機体側制御部40に送信する。温度情報(T)は、電源に対する負荷情報の1つである。
温度計34によって計測する領域の温度は、上空の大気温度ではなく、飛行している飛行体3のバッテリー32の温度、飛行している飛行体3の機内の温度であっても良い。
GPS受信機41は、飛行体3の地上座標上の絶対位置を、GPS衛星から経度および緯度により取得する。GPS受信機41は、取得した飛行体3の絶対位置を示す情報である飛行体位置情報を機体側制御部40に送信する。この飛行体位置情報は、飛行体3の現在位置情報(P1)であり、飛行現在情報(A)の1つである。現在位置情報(P1)は、電源に対する負荷情報の1つである。
磁気方位計42は、飛行体3の絶対方位角を取得するものである。磁気方位計42は、取得した飛行体3の絶対方位角を示す情報である飛行方向情報として機体側制御部40に送信する。この飛行方向情報は、飛行現在情報(A)の1つである。
角速度計43は、3軸のジャイロスコープであって、飛行体3のロール角、ピッチ角及びヨー角の方向における角速度を計測して取得するものである。角速度計43は、取得した飛行体3の角速度を示す情報である機体姿勢情報を機体側制御部40に送信する。この機体姿勢情報は飛行現在情報Aの1つである。飛行体3は、角速度計43から出力される機体姿勢情報に基づいて、機体側制御部40よって自らの姿勢を自動制御可能とされている。
高度計45は、たとえば気圧高度計であって、飛行体3の地表面からの高度を計測して取得するものである。高度計45は、取得した飛行体3の高度を示す情報である機体高度情報を機体側制御部40に送信する。この機体高度情報は、飛行現在情報(A)の1つである。高度計45は、気圧を計測して高度に換算することから、飛行体3が飛行する上空の気圧を計測して取得し、取得した気圧を示す情報である気圧情報を機体側制御部40に送信することもできる。
磁気方位計42は、飛行体3の絶対方位角を取得するものである。磁気方位計42は、取得した飛行体3の絶対方位角を示す情報である飛行方向情報として機体側制御部40に送信する。この飛行方向情報は、飛行現在情報(A)の1つである。
角速度計43は、3軸のジャイロスコープであって、飛行体3のロール角、ピッチ角及びヨー角の方向における角速度を計測して取得するものである。角速度計43は、取得した飛行体3の角速度を示す情報である機体姿勢情報を機体側制御部40に送信する。この機体姿勢情報は飛行現在情報Aの1つである。飛行体3は、角速度計43から出力される機体姿勢情報に基づいて、機体側制御部40よって自らの姿勢を自動制御可能とされている。
高度計45は、たとえば気圧高度計であって、飛行体3の地表面からの高度を計測して取得するものである。高度計45は、取得した飛行体3の高度を示す情報である機体高度情報を機体側制御部40に送信する。この機体高度情報は、飛行現在情報(A)の1つである。高度計45は、気圧を計測して高度に換算することから、飛行体3が飛行する上空の気圧を計測して取得し、取得した気圧を示す情報である気圧情報を機体側制御部40に送信することもできる。
飛行速度計46は、飛行体3の飛行速度(対地速度)を計測して取得するものである。高度計45は、取得した飛行体3の飛行速度を示す情報である機体速度情報(Vd)を機体側制御部40に送信する。この機体速度情報(Vd)は、飛行現在情報(A)の1つであり、電源に対する負荷情報の1つである。飛行速度計46としては、対地速度を計測して取得するものを用いることができる。
レインセンサ48は、飛行体3が飛行する領域の天候情報(J)を取得する天候情報取得部である。本実施形態において、レインセンサ48は、飛行体3の機体表面に設けた検知面に付着する水滴量に応じて出力が変化する周知のものである。このレインセンサ48からの出力値は、天候情報(J)として機体側制御部40に送信される。
これらGPS受信機41、磁気方位計42、角速度計43、高度計45及び飛行速度計46は、飛行体3の飛行現在情報(A)を取得する飛行現在情報取得部70を構成している。
温度計34、GPS受信機41、飛行速度計46、レインセンサ48は、負荷情報取得部80を構成している。
レインセンサ48は、飛行体3が飛行する領域の天候情報(J)を取得する天候情報取得部である。本実施形態において、レインセンサ48は、飛行体3の機体表面に設けた検知面に付着する水滴量に応じて出力が変化する周知のものである。このレインセンサ48からの出力値は、天候情報(J)として機体側制御部40に送信される。
これらGPS受信機41、磁気方位計42、角速度計43、高度計45及び飛行速度計46は、飛行体3の飛行現在情報(A)を取得する飛行現在情報取得部70を構成している。
温度計34、GPS受信機41、飛行速度計46、レインセンサ48は、負荷情報取得部80を構成している。
機体カメラ47は、飛行体3に搭載された状況取得部と一例としての撮像装置であって、飛行体3から画像を撮像して取得するものである。機体カメラ47は、動画と静止画を撮像することができるものである。つまり、飛行体3は、空撮可能とされている。機体カメラ47は、取得した飛行体3からの画像を示す画像情報(G)を機体側制御部40に送信する。機体カメラ47としては、動画と静止画の双方を撮像できるタイプのものを用いているが、動作又は静止画の何れか一方だけを撮像できるタイプのものであっても良い。機体カメラ47は、図2に示すように、オートフォーカース機能を備えているとともに、レンズを有する筐体部47aが飛行体3の下方(地上)に向かうように飛行体3に搭載されている。機体カメラ47は、筐体部47aが360°旋回可能なものであって、車両側制御部50から送られる撮像指示によって撮影方向を自由に変更することができるように構成されている。機体カメラ47は、車両側制御部50から送られる撮像指示に含まれている撮像開始信号によって、動画撮像や静止画撮像を開始する。機体カメラ47は、車両側制御部50から送られる撮像指示に含まれている撮像停止信号によって、動画撮像や静止画撮像を停止する。
無線送受信機49は、飛行体3に搭載されていて、飛行体3と自車両2との間において信号や情報の送受信を行う通信装置である。無線送受信機49は、機体側制御部40から送信された飛行現在情報(A)、画像情報(G)と、電力残量情報(F)及び負荷情報である機体速度情報(Vd)、温度情報(T)、天候情報(J)を自車両2に送信するとともに、自車両2側から送信される飛行指示と撮像指示の情報を受信して、機体側制御部40に入力する。
無線送受信機49は、飛行体3に搭載されていて、飛行体3と自車両2との間において信号や情報の送受信を行う通信装置である。無線送受信機49は、機体側制御部40から送信された飛行現在情報(A)、画像情報(G)と、電力残量情報(F)及び負荷情報である機体速度情報(Vd)、温度情報(T)、天候情報(J)を自車両2に送信するとともに、自車両2側から送信される飛行指示と撮像指示の情報を受信して、機体側制御部40に入力する。
飛行体3は、距離計を備えていてもよい。距離計は、飛行体3の周囲に存在する障害物を検知し、検知された障害物までの距離を測定して取得するものである。距離計は、飛行体3が飛行中の際の、飛行体3の周囲に存在する障害物を検知し、検知された障害物までの距離を測定して取得するもので、取得した障害物までの距離を示す情報である障害物距離情報を機体側制御部40に送信する。このような距離計を備えていると、飛行体3の飛行の妨げになる設置物の高度情報やトンネルの最大坑内高さを事前に取得しなくても、障害物距離情報に基づいて、障害物との距離がゼロになる前に飛行体3の飛行状態(例えば飛行方向や飛行高度)を制御することで、飛行体3と障害物との衝突を回避することができるので好ましい。距離計としては、例えばレーザーやミリ波レーダーなどを照射して、その反射光や反射波から距離を測定する周知の構成を用いることができる。
機体側制御部40は、車両側制御部50から送信される飛行指示や撮像指示の情報を、無線送受信機49を介して受信する。機体側制御部40は、受信した飛行指示を示す情報に基づいて、実際に飛行体3が自車両2の進行方向に自車両2から所定距離、離間して飛行するための飛行軌道である目標飛行軌道を算出する。
機体側制御部40は、算出した目標飛行軌道に沿って、自車両2の進行方向に自車両2から所定距離離間して飛行体3が飛行するように、各駆動モータ30によって回転駆動される回転翼31の回転数を個別に制御する。この自車両2と飛行体3が離れて飛行する距離を離間距離とする。
機体側制御部40は、車両側制御部50から送信される撮像指示に基づいて、機体カメラ47の撮影方向を定めて撮像するように制御する。機体側制御部40は、車両側制御部50から送信される撮像指示に基づいて、機体カメラ47の撮像を停止するように制御する。機体側制御部40は、撮像制御部としても機能する。機体側制御部40は、機体カメラ47から送信される画像情報(G)を、無線送受信機49を介して自車両2の車両側制御部50に送信する。
機体側制御部40は、算出した目標飛行軌道に沿って、自車両2の進行方向に自車両2から所定距離離間して飛行体3が飛行するように、各駆動モータ30によって回転駆動される回転翼31の回転数を個別に制御する。この自車両2と飛行体3が離れて飛行する距離を離間距離とする。
機体側制御部40は、車両側制御部50から送信される撮像指示に基づいて、機体カメラ47の撮影方向を定めて撮像するように制御する。機体側制御部40は、車両側制御部50から送信される撮像指示に基づいて、機体カメラ47の撮像を停止するように制御する。機体側制御部40は、撮像制御部としても機能する。機体側制御部40は、機体カメラ47から送信される画像情報(G)を、無線送受信機49を介して自車両2の車両側制御部50に送信する。
(自車両の構成)
自車両2は、図4、図5に示すように、車両側制御部50、GPS受信機51、ハンドル角情報取得部52、角速度計53、加速度計54、ブレーキ情報取得部55、車速計56、アクセル開度情報取得部57、周辺環境取得部58、表示装置59、無線送受信機60及び離間距離情報取得部61を有している。
車両側制御部50は、CPU、ROM、RAMおよび入出力インターフェイスなどを備えて構成されるコンピュータである。車両側制御部50には、GPS受信機51、ハンドル角情報取得部52、角速度計53、加速度計54、ブレーキ情報取得部55、車速計56、アクセル開度情報取得部57、周辺環境取得部58、表示装置59、無線送受信機60、離間距離情報取得部61が信号線を介して接続されている。
GPS受信機51は、自車両2の地上座標上の絶対位置を、GPS衛星から緯度および経度により取得するとともに、自車両2の高度も取得する。GPS受信機51は、取得した自車両2の絶対位置を示す情報である車両位置情報と高度情報とを車両現在位置情報として車両側制御部50に送信する。この車両現在位置情報は、走行現在情報(B)の1つである。また、自車両2の車両位置情報は、車両の現在位置情報(P2)である。
自車両2は、図4、図5に示すように、車両側制御部50、GPS受信機51、ハンドル角情報取得部52、角速度計53、加速度計54、ブレーキ情報取得部55、車速計56、アクセル開度情報取得部57、周辺環境取得部58、表示装置59、無線送受信機60及び離間距離情報取得部61を有している。
車両側制御部50は、CPU、ROM、RAMおよび入出力インターフェイスなどを備えて構成されるコンピュータである。車両側制御部50には、GPS受信機51、ハンドル角情報取得部52、角速度計53、加速度計54、ブレーキ情報取得部55、車速計56、アクセル開度情報取得部57、周辺環境取得部58、表示装置59、無線送受信機60、離間距離情報取得部61が信号線を介して接続されている。
GPS受信機51は、自車両2の地上座標上の絶対位置を、GPS衛星から緯度および経度により取得するとともに、自車両2の高度も取得する。GPS受信機51は、取得した自車両2の絶対位置を示す情報である車両位置情報と高度情報とを車両現在位置情報として車両側制御部50に送信する。この車両現在位置情報は、走行現在情報(B)の1つである。また、自車両2の車両位置情報は、車両の現在位置情報(P2)である。
離間距離情報取得部61は、飛行体3から送信されてくる飛行体3の現在位置情報(P1)と自車両2の現在位置情報(P2)とから自車両2と飛行体3の離間距離を取得するものである。離間距離情報取得部61は、飛行体3の現在位置情報(P1)と自車両2の現在位置情報(P2)とを除算することで、離間距離を算出と、離間距離を示す情報である離間距離情報(W)を車両側制御部50に送信する。この離間距離情報取得部61は、負荷情報取得部80を構成し、離間距離情報(W)は、電源に対する負荷情報の1つである。
ハンドル角情報取得部52は、自車両2のハンドルの角度を検出して取得するものである。ハンドル角情報取得部52は、自車両2のハンドル角度から自車両2の進行方向情報を車両側制御部50に送信する。この進行方向情報は、走行現在情報(B)の1つである。
角速度計53は、ここでは、自車両2の傾斜状態となるヨー角度とロール角度の角速度を計測して取得する2軸のジャイロである。角速度計53は、2軸のジャイロではなく、ヨー角度とロール角度の角速度を個別に計測するものであっても良い。角速度計53は、自車両2のヨー角度とロール角度の角速度の各情報を車両姿勢情報として車両側制御部50に送信する。この車両姿勢情報は、走行現在情報(B)の1つである。
加速度計54は、自車両2の前後傾斜状態で在るピッチ角の角速度を計測して取得するものである。角速度計53は、自車両2のピッチ角の角速度の情報を車両姿勢情報として車両側制御部50に送信する。この車両姿勢情報は、走行現在情報(B)の1つである。
ハンドル角情報取得部52は、自車両2のハンドルの角度を検出して取得するものである。ハンドル角情報取得部52は、自車両2のハンドル角度から自車両2の進行方向情報を車両側制御部50に送信する。この進行方向情報は、走行現在情報(B)の1つである。
角速度計53は、ここでは、自車両2の傾斜状態となるヨー角度とロール角度の角速度を計測して取得する2軸のジャイロである。角速度計53は、2軸のジャイロではなく、ヨー角度とロール角度の角速度を個別に計測するものであっても良い。角速度計53は、自車両2のヨー角度とロール角度の角速度の各情報を車両姿勢情報として車両側制御部50に送信する。この車両姿勢情報は、走行現在情報(B)の1つである。
加速度計54は、自車両2の前後傾斜状態で在るピッチ角の角速度を計測して取得するものである。角速度計53は、自車両2のピッチ角の角速度の情報を車両姿勢情報として車両側制御部50に送信する。この車両姿勢情報は、走行現在情報(B)の1つである。
ブレーキ情報取得部55は、自車両2のブレーキが操作されているか否かを検出するものである。ブレーキ情報取得部55は、自車両2のブレーキ操作が運転者によって行われると、減速情報として車両側制御部50に送信する。この減速情報は、走行現在情報Bの1つである。
車速計56は、自車両2の移動量および速度を測定して取得するものである。車速計56は、速度を示す情報を車速情報として車両側制御部50に送信する。この車速情報は、走行現在情報(B)の1つである。
アクセル開度情報取得部57は、自車両2のアクセルペダルの踏込量を計測して取得するものである。アクセル開度情報取得部57は、アクセルペダルの踏込量の情報を車両側制御部50に送信する。この踏込量情報は、走行現在情報(B)の1つである。
これらGPS受信機51、ハンドル角情報取得部52、角速度計53、加速度計54、ブレーキ情報取得部55、車速計56、アクセル開度情報取得部57は、走行現在情報取得部71を構成している。
車速計56は、自車両2の移動量および速度を測定して取得するものである。車速計56は、速度を示す情報を車速情報として車両側制御部50に送信する。この車速情報は、走行現在情報(B)の1つである。
アクセル開度情報取得部57は、自車両2のアクセルペダルの踏込量を計測して取得するものである。アクセル開度情報取得部57は、アクセルペダルの踏込量の情報を車両側制御部50に送信する。この踏込量情報は、走行現在情報(B)の1つである。
これらGPS受信機51、ハンドル角情報取得部52、角速度計53、加速度計54、ブレーキ情報取得部55、車速計56、アクセル開度情報取得部57は、走行現在情報取得部71を構成している。
周辺環境取得部58は、地図情報を読み出して、自車両2の周辺環境を取得して表示装置59に表示する、例えばナビゲーション装置である。周辺環境取得部58は、地図情報を周辺環境情報として車両側制御部50に送信する。
なお、設置物の高度情報やトンネルの最大坑内高さは、予め取得して車両側制御部50のROMに格納して記憶させておいても良い。あるいは、インターネット回線を介して車両側制御部50のROMに適宜ダウンロードして記憶しても良い。あるいは、設置物の高度情報やトンネルの最大坑内高さの各種データを、メモリーカードのような外部記憶媒体に記憶して、周辺環境取得部58で読み出す形態であってもよい。
表示装置59は、周辺環境情報である地図情報や自車両2の位置や走行ルートを表示するとともに、機体カメラ47からの画像情報(G)を画像や文字として表示するモニタ装置である。表示装置59は、機体カメラ47が撮像した画像に応じた情報を、自車両2の乗員(運転者)に提示する提示部として機能する。
無線送受信機60は、自車両2に搭載されていて、飛行体3と自車両2との間において信号や情報の送受信を行う通信装置である。無線送受信機60は、車両側制御部50に送信された飛行指示と撮像指示を送信するとともに、飛行体3側から送信される飛行現在情報Aと画像情報(G)を受信して、車両側制御部50に入力する。
なお、設置物の高度情報やトンネルの最大坑内高さは、予め取得して車両側制御部50のROMに格納して記憶させておいても良い。あるいは、インターネット回線を介して車両側制御部50のROMに適宜ダウンロードして記憶しても良い。あるいは、設置物の高度情報やトンネルの最大坑内高さの各種データを、メモリーカードのような外部記憶媒体に記憶して、周辺環境取得部58で読み出す形態であってもよい。
表示装置59は、周辺環境情報である地図情報や自車両2の位置や走行ルートを表示するとともに、機体カメラ47からの画像情報(G)を画像や文字として表示するモニタ装置である。表示装置59は、機体カメラ47が撮像した画像に応じた情報を、自車両2の乗員(運転者)に提示する提示部として機能する。
無線送受信機60は、自車両2に搭載されていて、飛行体3と自車両2との間において信号や情報の送受信を行う通信装置である。無線送受信機60は、車両側制御部50に送信された飛行指示と撮像指示を送信するとともに、飛行体3側から送信される飛行現在情報Aと画像情報(G)を受信して、車両側制御部50に入力する。
車両側制御部50は、GPS受信部51から送信される車両現在位置情報と、ハンドル角情報取得部52から送信される進行方向情報と、角速度計53と加速度計54から送信される車両姿勢情報と、ブレーキ情報取得部55から送信されるブレーキ情報と、車速計56から送信される速度情報と、アクセル開度情報取得部57から送信されるアクセルペダルの踏込量情報等の走行現在情報(B)から、自車両2の現在の走行状態(走行現在状態)を判断する。走行現在状態とは、自車両2の車両現在位置情報である緯度と経度と高度、進行方向と車速、停止中か走行中か、直進走行中かカーブ走行中かという内容である。車両側制御部50は、これら自車両2の走行状態に応じた車両現像情報とともに、表示装置59上にその走行状態をアイコンあるいは文字や数字で表示する。
車両側制御部50は、飛行体3からの飛行現在情報(A)に基づいて、飛行体3の位置を認識するとともに、車両現在情報(B)と飛行現在情報(A)とに基づいて、運転支援時の飛行体3と自車両2との離間距離を算出する機能を備えている。車両側制御部50は、この離間距離の情報を飛行指示として撮像指示とともに無線送受信機60を介して飛行体3に送信する。
車両側制御部50は、飛行体3からの飛行現在情報(A)に基づいて、飛行体3の位置を認識するとともに、車両現在情報(B)と飛行現在情報(A)とに基づいて、運転支援時の飛行体3と自車両2との離間距離を算出する機能を備えている。車両側制御部50は、この離間距離の情報を飛行指示として撮像指示とともに無線送受信機60を介して飛行体3に送信する。
このような構成の運転支援制御装置1において、自車両2よりも前方に離間して飛行する飛行体3では、飛行指示と撮像指示とを無線送受信機49で受信して機体側制御部40でその内容を判断する。機体側制御部40は、指示された自車両2との離間距離を保持するように各駆動モータ30の駆動を制御して各回転翼31の回転数を調整することで飛行状態を制御する。また、機体側制御部40は、機体カメラ47で自車両2の周囲の道路5を中心に動画又は静止画を撮像する。撮像された画像は、画像情報(G)として飛行体3から無線送受信機49を介して自車両2へ向けて送信される。
自車両2では、送信された画像を無線送受信機60で受信して車両側制御部50に入力し、表示装置59に地図情報と一緒に表示することで、運転者に自車両2の前方の情報を提示する。
このため、運転者は、自車両2の周囲や進行方向の情報(例えば渋滞箇所、駐車車両のある箇所、各種工事の箇所、事故現場)に到達する前に事前に認識することができるので、ドライバビリティが向上する。
自車両2では、送信された画像を無線送受信機60で受信して車両側制御部50に入力し、表示装置59に地図情報と一緒に表示することで、運転者に自車両2の前方の情報を提示する。
このため、運転者は、自車両2の周囲や進行方向の情報(例えば渋滞箇所、駐車車両のある箇所、各種工事の箇所、事故現場)に到達する前に事前に認識することができるので、ドライバビリティが向上する。
実施形態において、運転支援とは、機体カメラ47で撮像した画像の情報を運転者に提示するものとして説明したが、運転支援としては、画像の情報を運転者に提示するものに限定するものではない。
例えば、飛行体3がGPS受信機41を備えている場合、自車両2の真上を飛行させることで、自車両2の位置をGPS受信機41からの位置情報で得ることができる。このため、自車両2のGPS受信機51が故障した場合には、その代用として位置情報をGPS受信機41から車両側制御部50が取得する。そして、ナビゲーションシステムの自車両位置の情報として用いることで、運転支援に利用することができる。
あるいは、飛行体3が気圧計(高度計)45や風速計を備えている場合には、当該気圧計からの気圧情報や風速計からの風速情報を車両側制御部50で取得する。一方、車両側制御部50には、所定の閾値や気圧変化率や風速変化率等を予め設定しておく。そして、飛行体3から送られてくる気圧情報や風速情報と、これら閾値や気圧変化率や風速変化率とを比較して、飛行体3から送られてくる気圧情報や風速情報が、閾値や変化率を超える場合には、自車両2が走行しているエリアの気象状況が悪化したものとして、運転者に提示するようにしても良い。この場合、局地的な天候の変化を運転者に表示装置59に表示して知らせることで、その運転を支援することができる。この場合、気圧計(高度計)45や風速計が、自車両2の周囲の状況の取得する状況取得部となる。
実施形態において、提示部としては画像を表示する表示装置59を例示したが、例えば、局地的な天候の変化を運転者に知らせる場合、表示装置59に表示するものではなく、光や音声によって知らせることで提示するものであって良い。
例えば、飛行体3がGPS受信機41を備えている場合、自車両2の真上を飛行させることで、自車両2の位置をGPS受信機41からの位置情報で得ることができる。このため、自車両2のGPS受信機51が故障した場合には、その代用として位置情報をGPS受信機41から車両側制御部50が取得する。そして、ナビゲーションシステムの自車両位置の情報として用いることで、運転支援に利用することができる。
あるいは、飛行体3が気圧計(高度計)45や風速計を備えている場合には、当該気圧計からの気圧情報や風速計からの風速情報を車両側制御部50で取得する。一方、車両側制御部50には、所定の閾値や気圧変化率や風速変化率等を予め設定しておく。そして、飛行体3から送られてくる気圧情報や風速情報と、これら閾値や気圧変化率や風速変化率とを比較して、飛行体3から送られてくる気圧情報や風速情報が、閾値や変化率を超える場合には、自車両2が走行しているエリアの気象状況が悪化したものとして、運転者に提示するようにしても良い。この場合、局地的な天候の変化を運転者に表示装置59に表示して知らせることで、その運転を支援することができる。この場合、気圧計(高度計)45や風速計が、自車両2の周囲の状況の取得する状況取得部となる。
実施形態において、提示部としては画像を表示する表示装置59を例示したが、例えば、局地的な天候の変化を運転者に知らせる場合、表示装置59に表示するものではなく、光や音声によって知らせることで提示するものであって良い。
(飛行体の帰還制御)
次に飛行体3の自車両2への帰還飛行制御について説明する。
本実施形態に係る運転支援制御装置1では、飛行体3が自車両2への帰還する際の飛行制御をすることで、飛行体3を確実に自車両2へ帰還して回収できるように帰還制御を実行する。図6は、運転支援制御装置1が有している、飛行体3の帰還飛行を制御する制御系の構成を示すブロック図である。
運転支援制御装置1は、飛行体3の飛行現在情報(A)を取得する飛行現在情報取得部70と、自車両2の走行現在情報(B)を取得する走行現在情報取得部71と、飛行現在情報取得部70から得られる飛行現在情報(A)と走行現在情報取得部71から得られる走行現在情報(B)とに基づき、飛行体3が自車両2へ帰還する帰還目標値(C)を算出する帰還目標算出部72と、帰還目標算出部72で算出された帰還目標値(C)に基づき、飛行体3が自車両2に帰還するように、飛行体3の飛行状態を制御する機体側制御部40と車両側制御部50とからなる制御部4を有している。
運転支援制御装置1は、飛行現在情報取得部70で取得した飛行現在情報(A)と走行現在情報取得部71から得られる走行現在情報(B)とに基づき、帰還目標算出部72を補正して実際の帰還目標値である実帰還目標値(D)を算出する実帰還目標算出部73を有している。
制御部4は、実帰還目標算出部73で算出された実帰還目標値(D)に基づき、飛行体3が自車両2に帰還するように、飛行体3の飛行状態を制御する。すなわち、車体側制御部50は、実帰還目標算出部73で算出された実帰還目標値(D)に基づき、飛行体3が自車両2に帰還するように、飛行体3の飛行状態を制御する制御指示を機体側制御部40に対して行う。
次に飛行体3の自車両2への帰還飛行制御について説明する。
本実施形態に係る運転支援制御装置1では、飛行体3が自車両2への帰還する際の飛行制御をすることで、飛行体3を確実に自車両2へ帰還して回収できるように帰還制御を実行する。図6は、運転支援制御装置1が有している、飛行体3の帰還飛行を制御する制御系の構成を示すブロック図である。
運転支援制御装置1は、飛行体3の飛行現在情報(A)を取得する飛行現在情報取得部70と、自車両2の走行現在情報(B)を取得する走行現在情報取得部71と、飛行現在情報取得部70から得られる飛行現在情報(A)と走行現在情報取得部71から得られる走行現在情報(B)とに基づき、飛行体3が自車両2へ帰還する帰還目標値(C)を算出する帰還目標算出部72と、帰還目標算出部72で算出された帰還目標値(C)に基づき、飛行体3が自車両2に帰還するように、飛行体3の飛行状態を制御する機体側制御部40と車両側制御部50とからなる制御部4を有している。
運転支援制御装置1は、飛行現在情報取得部70で取得した飛行現在情報(A)と走行現在情報取得部71から得られる走行現在情報(B)とに基づき、帰還目標算出部72を補正して実際の帰還目標値である実帰還目標値(D)を算出する実帰還目標算出部73を有している。
制御部4は、実帰還目標算出部73で算出された実帰還目標値(D)に基づき、飛行体3が自車両2に帰還するように、飛行体3の飛行状態を制御する。すなわち、車体側制御部50は、実帰還目標算出部73で算出された実帰還目標値(D)に基づき、飛行体3が自車両2に帰還するように、飛行体3の飛行状態を制御する制御指示を機体側制御部40に対して行う。
図7に示すフローチャートを用いて飛行体3の帰還制御の内容について説明する。図7に示すフローチャートの処理は、制御部4によって実行される。この飛行体3の帰還制御において、飛行指示までの処理は車両側制御部50で実行され、飛行体3の飛行速度と飛行姿勢などの飛行制御自体は、機体側制御部40によって実行される。
機体側制御部40は、飛行現在情報(A)を飛行現在情報取得部70で取得して無線送受信機49を介して自車両2へと送信する。ここでは、飛行体3の機体速度情報、飛行方向情報、飛行位置情報(絶対位置と高度)、飛行姿勢情報を送信する(ステップST1)。
自車両2側では、飛行現在情報(A)を無線送受信機60で受信し、車体側制御部50によってRAMに記憶して保存する(ステップST2)。
車体側制御部50は、走行現在情報(B)を、走行現在情報取得部71で取得する。ここでは、自車両2の車速情報、進行方向情報、車両現在位置情報(絶対位置と高度)、車両姿勢情報、ブレーキ情報及び踏込量情報を取得する(ステップST3)。
車体側制御部50は、取得した走行現在情報(B)を、車体側制御部50のRAMに記憶して保存する(ステップST4)。
機体側制御部40は、飛行現在情報(A)を飛行現在情報取得部70で取得して無線送受信機49を介して自車両2へと送信する。ここでは、飛行体3の機体速度情報、飛行方向情報、飛行位置情報(絶対位置と高度)、飛行姿勢情報を送信する(ステップST1)。
自車両2側では、飛行現在情報(A)を無線送受信機60で受信し、車体側制御部50によってRAMに記憶して保存する(ステップST2)。
車体側制御部50は、走行現在情報(B)を、走行現在情報取得部71で取得する。ここでは、自車両2の車速情報、進行方向情報、車両現在位置情報(絶対位置と高度)、車両姿勢情報、ブレーキ情報及び踏込量情報を取得する(ステップST3)。
車体側制御部50は、取得した走行現在情報(B)を、車体側制御部50のRAMに記憶して保存する(ステップST4)。
車体側制御部50は、飛行現在情報(A)から、飛行体3の飛行速度、飛行方向、機体姿勢、機体位置を認識する(ステップST5)。
車体側制御部50は、車両現在情報(B)から、自車両2の走行速度、走行方向、車両姿勢、車両位置を認識する(ステップST6)。
帰還目標算出部72では、飛行現在情報(A)と走行現在情報(B)とに基づき、飛行体3が自車両2へ帰還する帰還目標値(C)を算出する。ここでの帰還目標値(C)とは、理想とする飛行体3の飛行位置、飛行方向、飛行姿勢であり、これらを算出する(ステップST7)。
実帰還目標算出部73では、飛行体3から得た飛行現在情報(A)と自車両2から得た車両現在情報(B)とに基づき、理想とする飛行体3の状態である帰還目標値(C)を補正して、実際に飛行体3を自車両2へ移動させるための実帰還目標値(D)を算出する。ここでは、帰還目標値(C)として求めた飛行位置、飛行方向、飛行姿勢と、飛行現在情報(A)として取得した飛行位置、飛行方向、飛行姿勢を示す情報から飛行体3の飛行速度、飛行方向、飛行姿勢を求める。本実施形態では、自車両2に対して最短で帰還可能な飛行速度、飛行方向、飛行姿勢を求める(ステップST8)。
車体側制御部50は、車両現在情報(B)から、自車両2の走行速度、走行方向、車両姿勢、車両位置を認識する(ステップST6)。
帰還目標算出部72では、飛行現在情報(A)と走行現在情報(B)とに基づき、飛行体3が自車両2へ帰還する帰還目標値(C)を算出する。ここでの帰還目標値(C)とは、理想とする飛行体3の飛行位置、飛行方向、飛行姿勢であり、これらを算出する(ステップST7)。
実帰還目標算出部73では、飛行体3から得た飛行現在情報(A)と自車両2から得た車両現在情報(B)とに基づき、理想とする飛行体3の状態である帰還目標値(C)を補正して、実際に飛行体3を自車両2へ移動させるための実帰還目標値(D)を算出する。ここでは、帰還目標値(C)として求めた飛行位置、飛行方向、飛行姿勢と、飛行現在情報(A)として取得した飛行位置、飛行方向、飛行姿勢を示す情報から飛行体3の飛行速度、飛行方向、飛行姿勢を求める。本実施形態では、自車両2に対して最短で帰還可能な飛行速度、飛行方向、飛行姿勢を求める(ステップST8)。
車体側制御部50は、算出された差分値である最短で帰還可能な飛行速度、飛行方向、飛行姿勢からなる実帰還目標値(D)を飛行指示として無線送受信機60を介して飛行体3へ送信する(ステップST9)。
飛行体3側では、自車両2から送信された飛行指示(最短で帰還可能な飛行速度、飛行方向、飛行姿勢)を無線送受信機60で受信し、機体側制御部40によってRAMに記憶して保存する(ステップST10)。
機体側制御部40は、飛行指示(最短で帰還可能な飛行速度、飛行方向、飛行姿勢)となるように、図2、図3に示す各駆動モータ30の駆動を制御して各回転翼31の回転数を調整して飛行状態を制御する(ステップST11)。
このようなステップST1〜ステップST11までの帰還処理は、飛行体3が自車両2の離着陸部20に帰還するまで、例えば1秒ごとに繰り返されて実行される。
飛行体3側では、自車両2から送信された飛行指示(最短で帰還可能な飛行速度、飛行方向、飛行姿勢)を無線送受信機60で受信し、機体側制御部40によってRAMに記憶して保存する(ステップST10)。
機体側制御部40は、飛行指示(最短で帰還可能な飛行速度、飛行方向、飛行姿勢)となるように、図2、図3に示す各駆動モータ30の駆動を制御して各回転翼31の回転数を調整して飛行状態を制御する(ステップST11)。
このようなステップST1〜ステップST11までの帰還処理は、飛行体3が自車両2の離着陸部20に帰還するまで、例えば1秒ごとに繰り返されて実行される。
このように、飛行現在情報取得部70から得られる飛行現在情報(A)と走行現在情報取得部71から得られる走行現在情報(B)とに基づき、飛行体3が自車両2へ帰還する帰還目標値(C)が帰還目標算出部72で算出され、算出された帰還目標値(C)に基づき、飛行体3が自車両2に帰還するように制御部4で飛行体の飛行状態を制御するので、飛行体3と自車両2との双方の現在情報を考慮して飛行体3を確実に自車両2に帰還させることができる。
また、本実施形態では、飛行体3から得た飛行現在情報(A)と自車両2から得た車両現在情報(B)とに基づき、理想とする帰還目標値(C)を補正して、実際に飛行体3を自車両2へ移動させるための実帰還目標値(D)を実帰還目標算出部73によって算出する。このため、飛行体3を自車両2に帰還させる際のあるべき位置である帰還目標値(C)に当該飛行体3を帰還させることが困難である場合でも、新たな帰還目標値(実帰還目標算出部73)を設定することで、飛行体3をより確実に自車両2に帰還させることができる。
また、本実施形態では、飛行体3から得た飛行現在情報(A)と自車両2から得た車両現在情報(B)とに基づき、理想とする帰還目標値(C)を補正して、実際に飛行体3を自車両2へ移動させるための実帰還目標値(D)を実帰還目標算出部73によって算出する。このため、飛行体3を自車両2に帰還させる際のあるべき位置である帰還目標値(C)に当該飛行体3を帰還させることが困難である場合でも、新たな帰還目標値(実帰還目標算出部73)を設定することで、飛行体3をより確実に自車両2に帰還させることができる。
(バッテリー残量を考慮した飛行体の帰還制御)
飛行体3は、駆動源として電動の駆動モータ31を用いているため、電源となるバッテリー32を搭載している。このため、バッテリー残量がなくなると、自車両2に帰還することができなくなるので、帰還に必要な電力容量を残しておく必要がある。
そこで、本実施形態では、バッテリー32の電力残量が必要な電力容量よりも少なくなると、飛行体3を自車両2に帰還するように飛行制御をすることで、飛行体3を確実に自車両2へ帰還可能としている。本実施形態において、バッテリー32には、リチウムイオン電池、リチウムポリマー電池などを用いている。無論、乾電池などを電源としても良いが、飛行体3の機体重量の増大を抑制できるものが好ましい。
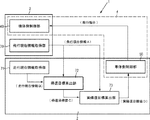
図8は、運転支援制御装置1が有している、バッテリー残量を考慮した飛行体3の帰還飛行を制御する制御系の構成を示すブロック図である。図8に示すように、運転支援制御装置1は、バッテリー32の電力残量(F)を取得する電力残量取得部33と、バッテリー32に対する負荷情報(H)を取得する負荷情報取得部80と、負荷情報取得部80から得られる負荷情報に基づき、目標予備電力残量(Fa)を取得する目標電力残量取得部81と、目標予備電力残量(Fa)よりも電力残量(F)が少ない場合には、飛行体3が自車両2に帰還するように、飛行体3の飛行状態を制御する制御部4を有している。
飛行体3は、駆動源として電動の駆動モータ31を用いているため、電源となるバッテリー32を搭載している。このため、バッテリー残量がなくなると、自車両2に帰還することができなくなるので、帰還に必要な電力容量を残しておく必要がある。
そこで、本実施形態では、バッテリー32の電力残量が必要な電力容量よりも少なくなると、飛行体3を自車両2に帰還するように飛行制御をすることで、飛行体3を確実に自車両2へ帰還可能としている。本実施形態において、バッテリー32には、リチウムイオン電池、リチウムポリマー電池などを用いている。無論、乾電池などを電源としても良いが、飛行体3の機体重量の増大を抑制できるものが好ましい。
図8は、運転支援制御装置1が有している、バッテリー残量を考慮した飛行体3の帰還飛行を制御する制御系の構成を示すブロック図である。図8に示すように、運転支援制御装置1は、バッテリー32の電力残量(F)を取得する電力残量取得部33と、バッテリー32に対する負荷情報(H)を取得する負荷情報取得部80と、負荷情報取得部80から得られる負荷情報に基づき、目標予備電力残量(Fa)を取得する目標電力残量取得部81と、目標予備電力残量(Fa)よりも電力残量(F)が少ない場合には、飛行体3が自車両2に帰還するように、飛行体3の飛行状態を制御する制御部4を有している。
本実施形態において、負荷情報取得部80としては、上述した、温度計34、飛行速度計46、レインセンサ48及び離間距離情報取得部61を用いる。負荷情報としては、離間距離情報(W)機体速度情報(Vd)、温度情報(T)、天候情報(J)を用いる。
目標電力残量取得部81は、車両側制御部50のROMに予め記憶設定されている必要予備電力量初期値(K)に対して負荷情報を乗算することで目標予備電力残量(Fa)を算出して取得するものである。目標電力残量取得部81は、目標予備電力残量(Fa)を車両側制御部50に送信する。
目標電力残量取得部81は、負荷情報が高くなるに従い、目標予備電力残量(Fa)を大きくするように変更する補正部82を備えている。補正部82はデータテーブルであって、車両側制御部50のROMが機能する。
目標電力残量取得部81は、車両側制御部50のROMに予め記憶設定されている必要予備電力量初期値(K)に対して負荷情報を乗算することで目標予備電力残量(Fa)を算出して取得するものである。目標電力残量取得部81は、目標予備電力残量(Fa)を車両側制御部50に送信する。
目標電力残量取得部81は、負荷情報が高くなるに従い、目標予備電力残量(Fa)を大きくするように変更する補正部82を備えている。補正部82はデータテーブルであって、車両側制御部50のROMが機能する。
補正部82には、離間距離情報(W)、機体速度情報(Vd)、温度情報(T)、天候情報(J)に応じた補正係数が記憶されている。これら補正係数の一例を図9に示す。図9(a)は、離間距離と補正係数のデータテーブルの一例である。ここでは、離間距離を10m以下、11〜20m、21〜30m・・というように、離間距離が所定距離毎に複数に区切られていて、所定距離毎に補正係数が設定されている。ここでは、所定離間距離が短く、バッテリー32に対する負荷が小さい0〜10mの場合、補正係数が1.0に設定されていて、以下所定離間距離が延びるに従い補正係数の値が1.1、1.2と大きくなるように設定されている。つまり、離間距離が短いと、自車両2に帰還するまでの飛行時間が短くバッテリー32の消費電力が少なく負荷が低いとしている。また、離間距離が延びると、自車両2に帰還するまでの飛行時間が長くバッテリー32の消費電力が多く負荷が高いとしている。このため、補正係数は、負荷情報が高くなるに従い(離間距離が延びるに従い)大きくなるように設定されている。
図9(b)は、天候情報と補正係数のデータテーブルの一例である。ここでは、天候情報を晴れ、小雨、雨・・・というように複数に区切り、天候情報毎に補正係数が設定されている。ここでは、天候が「晴れ」の場合を飛行体3の飛行負荷が小さくものとし、補正係数の値を1.0と、以下、小雨、雨と、雨の量が増えるに従い補正係数の値が1.1、1.2と大きくなるように設定されている。つまり、晴れの場合は、自車両2に帰還するまでの飛行抵抗が小さく、バッテリー32の消費電力も少なく負荷が低いとしている。また、雨の量が増えると、自車両2に帰還するまでの飛行抵抗が大きく、バッテリー32の消費電力も多く負荷が高いものとしている。このため、補正係数は、負荷情報が高くなるに従い(天候状況か悪化するに従い)大きくなるように設定されている。
図9(c)は、温度情報と補正係数のデータテーブルの一例である。ここでは、温度帯を−11℃以下、−10℃〜0°、1℃〜10℃・・というように、所定温度帯毎に複数に区切られていて、所定温度帯毎に補正係数が設定されている。ここでは、1℃〜10℃を基準の温度帯毎とし、この時の補正係数を1.0とする。また、基準の温度帯毎よりも低温となる温度帯である−10℃〜0°、−11℃以下の場合には、温度が下がる程、バッテリー32の放電効率が低下して、負荷になることから、温度帯が下がるに従い補正係数が1.1,1.2と大きくなるように設定されている。つまり、負荷情報が高くなるに従い、補正係数が大きくなるように設定されている。
また、バッテリー32にリチウムイオン電池やリチウムポリマー電池をもいる場合、温度が高くなり過ぎると、バッテリーパックの破損につながる。この場合バッテリー32の使用不能につながり負荷となることから、例えば所定温度(60℃)以上になるに従い、補正係数が大きくなるように設定している。バッテリー32の補正係数に関しては、使用するバッテリー32の種類に応じて具体的な補正係数の数値を定めればよいが、放電効率が低下する方向や、発熱による破損のおそれが高まる方向にバッテリー32の温度が進むに従い、補正係数を大きくするのが望ましい。
図9(d)は、飛行速度と補正係数のデータテーブルの一例である。ここでは、飛行速度10Km/h以下、11〜20Km/h、21〜30Km/h・・・というように、飛行速度が所定速度毎に複数に区切られていて、所定速度毎に補正係数が設定されている。ここでは、飛行速度が低く、バッテリー32の負荷が小さい0〜10mの場合、補正係数が1.0に設定されていて、以下飛行速度が速くなるに従い補正係数の値が1.1、1.2と大きくなるように設定されている。つまり、負荷情報が高くなるに従い、補正係数が大きくなるように設定されている。
目標電力残量取得部81は、レインセンサ61の出力値である天候情報(J)の数値から天候状態を反対する判定値を備えていて、当該判定値と天候情報(J)とから天候状態を判定し、判定した天候に応じた補正係数を選択する機能を備えている。
また、バッテリー32にリチウムイオン電池やリチウムポリマー電池をもいる場合、温度が高くなり過ぎると、バッテリーパックの破損につながる。この場合バッテリー32の使用不能につながり負荷となることから、例えば所定温度(60℃)以上になるに従い、補正係数が大きくなるように設定している。バッテリー32の補正係数に関しては、使用するバッテリー32の種類に応じて具体的な補正係数の数値を定めればよいが、放電効率が低下する方向や、発熱による破損のおそれが高まる方向にバッテリー32の温度が進むに従い、補正係数を大きくするのが望ましい。
図9(d)は、飛行速度と補正係数のデータテーブルの一例である。ここでは、飛行速度10Km/h以下、11〜20Km/h、21〜30Km/h・・・というように、飛行速度が所定速度毎に複数に区切られていて、所定速度毎に補正係数が設定されている。ここでは、飛行速度が低く、バッテリー32の負荷が小さい0〜10mの場合、補正係数が1.0に設定されていて、以下飛行速度が速くなるに従い補正係数の値が1.1、1.2と大きくなるように設定されている。つまり、負荷情報が高くなるに従い、補正係数が大きくなるように設定されている。
目標電力残量取得部81は、レインセンサ61の出力値である天候情報(J)の数値から天候状態を反対する判定値を備えていて、当該判定値と天候情報(J)とから天候状態を判定し、判定した天候に応じた補正係数を選択する機能を備えている。
図10に示すフローチャートを用いて飛行体3のバッテリー残量を考慮した帰還制御の内容について説明する。図10に示すフローチャートの処理は、制御部4によって実行される。この飛行体3の帰還制御において、飛行指示までの処理は車両側制御部50で実行され、飛行体3の飛行速度と飛行姿勢などの飛行制御自体は、機体側制御部40によって実行される。
機体側制御部40は、負荷情報(H)である機体速度情報(Vd)、温度情報(T)、天候情報(J)及び現在位置情報(P1)を取得して無線送受信機49を介して自車両2へと送信する。(ステップST21)。
自車両2側では、機体速度情報(Vd)、温度情報(T)、天候情報(J)及び現在位置情報(P1)を無線送受信機60で受信し、車体側制御部50のRAMに記憶して保存する(ステップST22)。
車体側制御部50は、現在位置情報(P2)を取得し、車体側制御部50のRAMに記憶して保存する(ステップST23)。
機体側制御部40は、負荷情報(H)である機体速度情報(Vd)、温度情報(T)、天候情報(J)及び現在位置情報(P1)を取得して無線送受信機49を介して自車両2へと送信する。(ステップST21)。
自車両2側では、機体速度情報(Vd)、温度情報(T)、天候情報(J)及び現在位置情報(P1)を無線送受信機60で受信し、車体側制御部50のRAMに記憶して保存する(ステップST22)。
車体側制御部50は、現在位置情報(P2)を取得し、車体側制御部50のRAMに記憶して保存する(ステップST23)。
離間距離情報取得部61は、飛行体3の現在位置情報(P1)と自車両2の現在位置情報(P2)とから離間距離を算出して取得し、離間距離情報(W)として車体側制御部50によってRAMに記憶して保存する(ステップST24)。
目標電力残量取得部81は、必要予備電力量初期値(K)と負荷情報(H)とを乗算することで目標予備電力残量(Fa)を算出して取得し、車体側制御部50に送信する(ステップST25)。この目標予備電力残量(Fa)の具体的な算出処理は、図11に示すフローチャートを用いて説明する。図11に示すフローチャートは、目標予備電力残量(Fa)を算出する処理を示すものであり、図10に示すフローチャートをメインルーチンとしたとき、サブルーチンとして機能する。
本実施形態において、目標電力残量取得部81は、まず必要予備電力量初期値(K)を読み出し(ステップST31)する。目標電力残量取得部81は、ステップST32〜ステップST35において、離間距離情報(W)に応じた補正係数、天候情報(J)に応じた補正係数、温度情報(T)に応じた補正係数、機体速度情報(Vd)に応じた補正係数を、図9(a)〜図9(d)に示すデータテーブル(補正部82)から選択し、必要予備電力量初期値(K)と選択した補正係数を乗算し、目標予備電力残量(Fa)を車両側制御部50のRAMに記憶して保存する(ステップST36)。
例えば、必要予備電力量初期値(K)がバッテリーの全容量の30%とする。そして離間距離情報(W)は10m以下の速度帯、天候情報(J)は晴れ、温度情報(T)は0〜10℃の温度帯、機体速度情報(Vd)が21〜30Km/hの速度帯とすると、目標予備電力残量(Fa)=30%×1.0×1.0×1.0×1.2=36%となる。つまり、目標予備電力残量(Fa)が30%から機体速度の負荷が増えたものとして36%まで高められる。目標予備電力残量(Fa)が算出されると、ステップST26に進む。
目標電力残量取得部81は、必要予備電力量初期値(K)と負荷情報(H)とを乗算することで目標予備電力残量(Fa)を算出して取得し、車体側制御部50に送信する(ステップST25)。この目標予備電力残量(Fa)の具体的な算出処理は、図11に示すフローチャートを用いて説明する。図11に示すフローチャートは、目標予備電力残量(Fa)を算出する処理を示すものであり、図10に示すフローチャートをメインルーチンとしたとき、サブルーチンとして機能する。
本実施形態において、目標電力残量取得部81は、まず必要予備電力量初期値(K)を読み出し(ステップST31)する。目標電力残量取得部81は、ステップST32〜ステップST35において、離間距離情報(W)に応じた補正係数、天候情報(J)に応じた補正係数、温度情報(T)に応じた補正係数、機体速度情報(Vd)に応じた補正係数を、図9(a)〜図9(d)に示すデータテーブル(補正部82)から選択し、必要予備電力量初期値(K)と選択した補正係数を乗算し、目標予備電力残量(Fa)を車両側制御部50のRAMに記憶して保存する(ステップST36)。
例えば、必要予備電力量初期値(K)がバッテリーの全容量の30%とする。そして離間距離情報(W)は10m以下の速度帯、天候情報(J)は晴れ、温度情報(T)は0〜10℃の温度帯、機体速度情報(Vd)が21〜30Km/hの速度帯とすると、目標予備電力残量(Fa)=30%×1.0×1.0×1.0×1.2=36%となる。つまり、目標予備電力残量(Fa)が30%から機体速度の負荷が増えたものとして36%まで高められる。目標予備電力残量(Fa)が算出されると、ステップST26に進む。
車体側制御部50は、目標予備電力残量(Fa)と電力残量(F)とを比較する。そして、電力残量(F)が目標予備電力残量(Fa)に満たない場合には、飛行体3への帰還指示はしない(ステップST26、ST27)。一方、電力残量(F)が目標予備電力残量(Fa)よりも少ない場合には、飛行体3が自車両2に帰還するように無線送受信機60を介して帰還指示を飛行指示として飛行体3へ送信する(ステップST26、ST28)。
飛行体3側では、自車両2から送信された飛行指示(帰還指示)を無線送受信機60で受信し、制御部40のRAMに記憶して保存する(ステップST29)。
機体側制御部40は、飛行指示の内容で飛行するように、図2、図3に示す各駆動モータ30の駆動を制御して各回転翼31の回転数を調整して飛行状態を制御する(ステップST30)。
このようなステップST21〜ステップST30とステップST31〜ST35までの帰還処理は、飛行体3が自車両2の離着陸部20に帰還するまで、例えば1秒ごとに繰り返されて実行される。
飛行体3側では、自車両2から送信された飛行指示(帰還指示)を無線送受信機60で受信し、制御部40のRAMに記憶して保存する(ステップST29)。
機体側制御部40は、飛行指示の内容で飛行するように、図2、図3に示す各駆動モータ30の駆動を制御して各回転翼31の回転数を調整して飛行状態を制御する(ステップST30)。
このようなステップST21〜ステップST30とステップST31〜ST35までの帰還処理は、飛行体3が自車両2の離着陸部20に帰還するまで、例えば1秒ごとに繰り返されて実行される。
このように、バッテリー32に対する負荷情報(H)に基づき求められた目標予備電力残量(Fa)よりもバッテリー32の電力残量(F)少ない場合、飛行体3が自車両2に帰還するように制御部4で飛行体3の飛行状態を制御するので、飛行体3の駆動源となるバッテリー32の電力残量を考慮して飛行体を車両に帰還させることができる。このため、バッテリー32の電力不足による飛行体3の未帰還や落下等をぼうしすることができ、確実に飛行体3を自車両2に帰還させることができる。
また、目標電力残量取得部81は、負荷情報(H)が高くなるに従い、目標予備電力残量(Fa)を大きくするように補正して変更するので、負荷情報(H)が高くなるに従いバッテリー32の目標予備電力残量(Fa)が大きくなる。このため、飛行体3の飛行負荷、天候、飛行速度、温度などのバッテリー32の負荷が高まった場合でも、必要なバッテリーの電力を確保できるので、飛行体3を自車両2により確実に帰還させることができる。
また、目標電力残量取得部81は、負荷情報(H)が高くなるに従い、目標予備電力残量(Fa)を大きくするように補正して変更するので、負荷情報(H)が高くなるに従いバッテリー32の目標予備電力残量(Fa)が大きくなる。このため、飛行体3の飛行負荷、天候、飛行速度、温度などのバッテリー32の負荷が高まった場合でも、必要なバッテリーの電力を確保できるので、飛行体3を自車両2により確実に帰還させることができる。
本実施形態において、天候情報(J)は、飛行体3にレインセンサ48を設けて取得しているが、レインセンサ48を自車両2に設けて天候情報(J)を取得するようにしても良い。
本実施形態において、天候情報(J)は、飛行体3にレインセンサ48を設けて取得して直接検出して取得しているが、例えばインターネット回線に飛行体3又は自車両2が接続可能である場合には、当該インターネット回線から天候情報(J)を取得してもよい。
本実施形態において、天候情報(J)は、飛行体3にレインセンサ48を設けて取得して直接検出して取得しているが、例えばインターネット回線に飛行体3又は自車両2が接続可能である場合には、当該インターネット回線から天候情報(J)を取得してもよい。
以上、本発明の好ましい実施の形態について説明したが、本発明はかかる特定の実施形態に限定されるものではなく、上述の説明で特に限定していない限り、特許請求の範囲に記載された本発明の趣旨の範囲内において、種々の変形・変更が可能である。例えば、実施形態では、自車両2から離陸した飛行体3を自車両2へ帰還するものとして説明したが、飛行体3の離陸は自車両2とは別な地点から行ったものを自車両2の車両側制御部50で制御し、自車両2に帰還させるようにしてもよい。
機体カメラ47で撮像した画像情報(G)は、運転支援時に飛行体3から自車両2に送信して運転支援に用いているが、別な用途に用いても良い。例えば、帰還時にも機体カメラ47を起動して飛行体3から自車両2を空撮し、当該空撮した画像情報G1を自車両2に送信し、自車両2の離着陸部20の位置を車両側制御部50で画像処理し、当該離着陸部20を目標に飛行体3を帰還するようにしても良い。
本発明の実施の形態に記載された効果は、本発明から生じる最も好適な効果を列挙したに過ぎず、本発明による効果は、本発明の実施の形態に記載されたものに限定されるものではない。
機体カメラ47で撮像した画像情報(G)は、運転支援時に飛行体3から自車両2に送信して運転支援に用いているが、別な用途に用いても良い。例えば、帰還時にも機体カメラ47を起動して飛行体3から自車両2を空撮し、当該空撮した画像情報G1を自車両2に送信し、自車両2の離着陸部20の位置を車両側制御部50で画像処理し、当該離着陸部20を目標に飛行体3を帰還するようにしても良い。
本発明の実施の形態に記載された効果は、本発明から生じる最も好適な効果を列挙したに過ぎず、本発明による効果は、本発明の実施の形態に記載されたものに限定されるものではない。
1・・・運転支援制御装置、2・・・車両、3・・・飛行体、4・・・制御部、30・・・駆動源、31・・・回転翼、32・・・電源、33・・・電力残量取得部、40・・・機体側制御部、47・・・状況取得部,撮像装置、50・・・車両側制御部、59・・・提示部,表示装置、70・・・飛行現在情報取得部、71・・・走行現在情報取得部、72・・・帰還目標算出部、73・・・差分算出部、81・・・目標電力残量取得部、82・・・補正部、E・・・負荷情報取得部、H・・・負荷情報、J・・・天候情報、F・・・電力残量、Fa・・・目標予備電力残量、W・・・離間距離情報。
Claims (6)
- 車両と離間して飛行可能な無人の飛行体が有する回転翼を回転駆動させる電動駆動源の電源の電力残量を取得する電力残量取得部と、
前記電源に対して負荷となる負荷情報を取得する負荷情報取得部と、
前記負荷情報取得部から得られる負荷情報に基づき、目標予備電力残量を取得する目標電力残量取得部と、
前記目標電力残量取得部で取得した目標予備電力残量よりも前記電力残量が少ない場合には、前記飛行体が前記車両に帰還するように、前記飛行体の飛行状態を制御する制御部を有することを特徴とする運転支援制御装置。 - 請求項1に記載の運転支援制御装置において、
前記負荷情報は、
前記飛行体と前記車両との離間距離情報、前記飛行体が飛行している領域の天候情報前記飛行体が飛行している領域の温度情報、前記飛行体の飛行速度情報の内の少なくとも1つであり、
前記負荷情報取得部は、
前記飛行体の現在位置情報と前記車両の現在位置情報から離間距離情報を取得する離間距離情報取得部、前記天候情報を取得する天候情報取得部、前記温度情報を取得する温度情報取得部、温度情報を取得する温度情報取得部の内の少なくとも1つであることを特徴とする運転支援制御装置。 - 請求項1または2に記載の運転支援制御装置において、
前記目標電力残量取得部は、前記負荷情報が高くなるに従い、前記目標予備電力残量を大きくするように変更することを特徴とする運転支援制御装置。 - 請求項1〜3のうちの何れか1項に記載の運転支援制御装置において、
前記制御部は、前記車両に搭載される車両側制御部と前記飛行体に搭載される機体側制御部とを有し、
前記車両側制御部は、前記負荷情報に基づき、前記飛行体が前記車両に帰還するように、前記飛行体の飛行状態を制御する制御指示を前記機体側制御部に行うことを特徴とする運転支援制御装置。 - 請求項1〜4の内の何れか1項に記載の運転支援制御装置において、
前記飛行体に搭載されていて、前記車両の周囲の状況の取得する状況取得部と、
前記状況取得部で取得された情報を、前記車両の乗員に提示する提示部を有することを特徴とする運転支援制御装置。 - 請求項5に記載の運転支援制御装置において、
前記状況取得部は、前記車両の周囲の状況を撮像する撮像装置であり、
前記提示部は、前記撮像装置で撮像した情報に応じた内容を表示する表示装置であることを特徴とする運転支援制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015127878A JP2017007603A (ja) | 2015-06-25 | 2015-06-25 | 運転支援制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015127878A JP2017007603A (ja) | 2015-06-25 | 2015-06-25 | 運転支援制御装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017007603A true JP2017007603A (ja) | 2017-01-12 |
Family
ID=57761143
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015127878A Pending JP2017007603A (ja) | 2015-06-25 | 2015-06-25 | 運転支援制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2017007603A (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017105429A (ja) * | 2015-11-30 | 2017-06-15 | パナソニック インテレクチュアル プロパティ コーポレーション オブ アメリカPanasonic Intellectual Property Corporation of America | 無人飛行体及びその飛行制御方法 |
| CN110422079A (zh) * | 2019-07-15 | 2019-11-08 | 南京航空航天大学 | 一种车载飞行器的电量管理以及续航控制方法 |
| WO2020004029A1 (ja) * | 2018-06-26 | 2020-01-02 | ソニー株式会社 | 制御装置および方法、並びにプログラム |
| WO2020116494A1 (ja) * | 2018-12-05 | 2020-06-11 | 株式会社ナイルワークス | ドローンシステム |
| JP2020093618A (ja) * | 2018-12-11 | 2020-06-18 | 三菱自動車工業株式会社 | 車両用警備装置 |
| JP2020180786A (ja) * | 2019-04-23 | 2020-11-05 | 川崎重工業株式会社 | 移動支援プログラム、移動支援システムおよび移動支援方法 |
| WO2022094961A1 (zh) * | 2020-11-06 | 2022-05-12 | 深圳市大疆创新科技有限公司 | 无人控制机器人的控制方法、装置、无人控制机器人 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20130261914A1 (en) * | 2010-10-04 | 2013-10-03 | W. Morrison Consulting Group, Inc. | Vehicle control system and methods |
| US9056676B1 (en) * | 2014-05-30 | 2015-06-16 | SZ DJI Technology Co., Ltd | Systems and methods for UAV docking |
-
2015
- 2015-06-25 JP JP2015127878A patent/JP2017007603A/ja active Pending
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20130261914A1 (en) * | 2010-10-04 | 2013-10-03 | W. Morrison Consulting Group, Inc. | Vehicle control system and methods |
| US9056676B1 (en) * | 2014-05-30 | 2015-06-16 | SZ DJI Technology Co., Ltd | Systems and methods for UAV docking |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017105429A (ja) * | 2015-11-30 | 2017-06-15 | パナソニック インテレクチュアル プロパティ コーポレーション オブ アメリカPanasonic Intellectual Property Corporation of America | 無人飛行体及びその飛行制御方法 |
| WO2020004029A1 (ja) * | 2018-06-26 | 2020-01-02 | ソニー株式会社 | 制御装置および方法、並びにプログラム |
| JPWO2020004029A1 (ja) * | 2018-06-26 | 2021-08-05 | ソニーグループ株式会社 | 制御装置および方法、並びにプログラム |
| JP7310811B2 (ja) | 2018-06-26 | 2023-07-19 | ソニーグループ株式会社 | 制御装置および方法、並びにプログラム |
| WO2020116494A1 (ja) * | 2018-12-05 | 2020-06-11 | 株式会社ナイルワークス | ドローンシステム |
| JP2020093618A (ja) * | 2018-12-11 | 2020-06-18 | 三菱自動車工業株式会社 | 車両用警備装置 |
| JP2020180786A (ja) * | 2019-04-23 | 2020-11-05 | 川崎重工業株式会社 | 移動支援プログラム、移動支援システムおよび移動支援方法 |
| JP7240239B2 (ja) | 2019-04-23 | 2023-03-15 | カワサキモータース株式会社 | 移動支援プログラム、移動支援システムおよび移動支援方法 |
| CN110422079A (zh) * | 2019-07-15 | 2019-11-08 | 南京航空航天大学 | 一种车载飞行器的电量管理以及续航控制方法 |
| WO2022094961A1 (zh) * | 2020-11-06 | 2022-05-12 | 深圳市大疆创新科技有限公司 | 无人控制机器人的控制方法、装置、无人控制机器人 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11673650B2 (en) | Adaptive thrust vector unmanned aerial vehicle | |
| JP2017007603A (ja) | 運転支援制御装置 | |
| JP6893140B2 (ja) | 制御装置、制御方法、制御プログラム及び制御システム | |
| JP5837032B2 (ja) | 地上走行可能な飛行体 | |
| JP2017011614A (ja) | 運転支援制御装置 | |
| US9126693B1 (en) | Assisted takeoff | |
| JP6776083B2 (ja) | 飛行ロボット制御システムおよび飛行ロボット | |
| US10558218B2 (en) | Vehicle surroundings monitoring apparatus, monitoring system, remote monitoring apparatus, and monitoring method | |
| JP2010250478A (ja) | 運転支援装置 | |
| JP2006082774A (ja) | 無人飛行体及び無人飛行体制御方法 | |
| KR20140123835A (ko) | 무인 항공기 제어 장치 및 그 방법 | |
| CN113261274B (zh) | 一种图像处理方法及相关终端装置 | |
| JP2007245797A (ja) | 飛行制御装置及び飛行制御装置を備えた飛行体 | |
| JP2018055463A (ja) | 飛行ロボット制御システムおよび飛行ロボット | |
| JP7176785B2 (ja) | ドローン、ドローンの制御方法、および、ドローン制御プログラム | |
| JP2017010445A (ja) | 運転支援制御装置 | |
| CN111867935A (zh) | 飞行器和飞行器的控制方法 | |
| CN111465556A (zh) | 信息处理系统、信息处理方法及程序 | |
| JP2020180786A (ja) | 移動支援プログラム、移動支援システムおよび移動支援方法 | |
| JP2022029823A (ja) | 無人飛行体の制御システム、及び無人飛行体の制御方法 | |
| JP6547446B2 (ja) | 運転支援制御装置 | |
| US11281235B2 (en) | Systems and methods for avoiding strikes on multi-rotor vehicles | |
| JP2017010446A (ja) | 運転支援制御装置 | |
| JP2017010449A (ja) | 運転支援制御装置 | |
| JP2022097963A (ja) | 観測装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180323 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190227 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190305 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20190903 |