[001]本出願は、参照によりそのそれぞれの全体が本明細書に組み込まれる2013年3月15日に出願された米国特許出願第13/835,284号、2013年2月6日に出願された米国仮特許出願第61/761,412号、2014年1月23日に出願された米国仮特許出願第61/930,732号の優先権の利益を主張する。
[002]本発明は、米国エネルギー省により付与された契約番号DE−FG02−07ER46471の下、政府の支援によりなされた。政府は、本発明において、ある権利を有する。
[0111]一般に、本明細書で使用される用語及び文言は、標準的なテキスト、定期刊行物、及び当業者に公知の文脈を参照することによって見出すことができる、それらの技術分野で認識されている意味を有する。下記の定義は、本発明の文脈におけるそれらの特定の使用を明らかにするために提示される。
[0112]「2次元空間幾何形状」は、空間における材料、構造、又は構成要素の配置構成であって、それらが、平面を画定する2つの軸などの2つの独立した軸に沿って、又は対象若しくは基板の表面全体に分布している状態を指す。実施形態において、2次元空間幾何形状を保有する対象は、x−y平面内など、2次元のそれぞれの長さに沿って少なくとも一部が横断している材料、構造、又は構成要素を含む。本明細書で使用される「2次元空間幾何形状」は、空間内の2点間を直接延びる材料の線又は薄膜に対応する幾何形状などの、1次元幾何形状とは区別される。実施形態において、2次元空間幾何形状は、表面、例えば平面又は非平面状の表面全体にわたる、共形的な、材料、構造、又は構成要素の配置構成を含む。
[0113]「複数の空間周波数によって特徴付けられる2次元空間幾何形状」は、空間における材料、構造、又は構成要素の配置構成であって、それらが2つの独立した軸に沿って分布するような、且つ材料、構造、又は構成要素そのものが少なくとも2つの異なる長さスケールにより特徴付けられた周期的若しくは反復している空間構成によって特徴付けられることを指す。実施形態において、複数の空間周波数は、複数の長さスケール、例えば1次単位セル又は短距離長さスケール、2次の、2次形状、又はより長い距離の長さスケール、3次の、3次形状、又は長距離スケールなどによって特徴付けられる。いくつかの実施形態では、2次元空間幾何形状の複数の空間周波数は、フーリエ変換解析など、2次元空間幾何形状に配置構成された材料の空間分布の周波数解析によって特徴付けることができ、材料の空間分布を特徴付ける2つ以上の最大値をもたらす。実施形態において、複数の空間周波数によって特徴付けられた2次元空間幾何形状には、自己相似幾何形状、フラクタル様幾何形状、1〜2の間のフラクタル次元を有する幾何形状であって、任意選択でいくつかの適用例では1.3〜2の間のフラクタル次元を有する幾何形状が含まれるが、これらに限定するものではない。実施形態において、複数の空間周波数によって特徴付けられた2次元空間幾何形状には、ばね内蔵ばね型幾何形状が含まれるが、これに限定するものではない。
[0114]「フラクタルベースの2次元幾何形状」は、1つ又は複数の決定的フラクタルパターンをベースにした又はこれらのパターンからその他の手法で誘導された、伸縮性金属又は半導体デバイス構成要素の2次元幾何形状を指す。本発明のフラクタルベースの幾何形状に有用なフラクタルパターンには、ペアノ、Vicsek、ギリシャ十字、及びヒルベルトフラクタルが含まれるが、これらに限定するものではない。フラクタルベースの幾何形状の空間レイアウトは、(1つ又は複数の)レイアウト設計ルールとして、例えば線、周辺、又は形状を使用して(部分的に又は全体的に)、1つ又は複数のフラクタルパターンの形体を組み込む。フラクタルベースの幾何形状は、例えば、フラクタルパターンの鋭い角を、曲がりくねった幾何形状を持つフラクタルパターンのループ又は直線で置き換えることによって、伸縮性及び/又は充填率などの全体的な機械的又はその他の物理的性質を増強するために、任意選択でフラクタルパターンの修正例を組み込んでもよい。実施形態では、本発明で有用なフラクタルベースの幾何形状は、1.2〜2の範囲から選択された近似フラクタル次元によって特徴付けられる。ある実施形態では、本発明で有用なフラクタルベースの幾何形状は、正確な又は近似的な反復ルールによって定義された空間特性を有し、これは、多数の長さスケールによって、より高次のフラクタル様パターンを特徴付けるものである。例えば、N番目の反復パターンが長さスケールL_Nを有し且つN−1番目の反復パターンが長さスケールL_N−1を有する場合、全てのNに関する平均比L_N/L_N−1はAであり、所与のNに関する比L_N/L_N−1はAの±30%以内に包含される。いくつかの実施形態におけるフラクタルベースの幾何形状は、2つ以上の基本的なフラクタル様パターンを線又はメッシュに組み合わせることにより、より大きいフラクタル様パターンを生成する(例えば、図3C参照)。
[0115]「充填率」は、材料、要素、及び/又はデバイス構成要素の支持及び/又はこれらの要素による占有がなされる、第1及び第2の電気接触点、デバイス島、又は接触パッドなどの2つの要素間の面積のパーセンテージを指す。ある実施形態では例えば、充填率は、1つ又は複数の伸縮性金属又は半導体デバイス構成要素を支持する(及び任意選択で、物理接触する)弾性基板の表面又はその上に設けられた層の表面などの、表面の領域のパーセンテージを指す。ある実施形態では例えば、充填率は、1つ又は複数の伸縮性金属又は半導体デバイス構成要素を支持する(任意選択で物理接触する)、デバイスの作用領域上の領域のパーセンテージを指す。ある実施形態では例えば、充填率は、1つ又は複数の伸縮性金属又は半導体デバイス構成要素を支持する(任意選択で物理接触する)、半導体デバイス構成要素又はデバイスなどの2つのデバイス島の間に拡がる表面のパーセンテージを指す。ある実施形態では例えば、充填率は、1つ又は複数の伸縮性金属又は半導体デバイス構成要素を支持する、第1及び第2の電気接触点又は接触パッドなどの2つの要素間に拡がる表面部分の面積のパーセンテージを指す。
[0116]「機能層」は、デバイスにいくらかの機能性を与える層を指す。例えば機能層は、半導体構成要素を含有していてもよい。或いは機能層は、支持層によって分離された多数の半導体層など、多数の層を含んでいてもよい。機能層は、電極又は島の間又はそれらの下を走る相互接続など、複数のパターニングされた要素を備えていてもよい。機能層は、均質であってもよく、又は不均質な1つ若しくは複数の性質若しくは材料を有していてもよい。「不均質な性質」は、空間的に変化し得る物理的パラメータを指し、それによって、多層デバイス内の中立機械平面の位置を有効にする。
[0117]「構造層」は、例えばデバイス構成要素の支持及び/又は包封及び/又は分割を行うことによって構造的機能性を与える層を指す。
[0118]「半導体」は、非常に低い温度で絶縁体であるが、約300ケルビンの温度で明らかな導電性を有する任意の材料を指す。本発明の記述において、半導体という用語の使用は、マイクロエレクトロニクス及び電子デバイスの分野でのこの用語の使用と矛盾しないものとする。有用な半導体には、シリコン、ゲルマニウム、及びダイヤモンドなどの元素半導体と、化合物半導体、例えば、SiC及びSiGeなどのIV族化合物半導体、AlSb、AlAs、AlN、AlP、BN、BP、BAs、GaSb、GaAs、GaN、GaP、InSb、InAs、InN、及びInPなどのIII−V族半導体、AlxGa1−xAsなどのIII−V族3元半導体、CsSe、CdS、CdTe、ZnO、ZnSe、ZnS、及びZnTeなどのII−VI族半導体、CuClなどのI−VII族半導体、PbS、PbTe、及びSnSなどのIV−VI族半導体、PbI2、MoS2、及びGaSeなどの層半導体、CuO及びCu2Oなどの酸化物半導体を含むものが含まれる。半導体という用語は、真性半導体、及び1種又は複数の選択された材料がドープされた不純物半導体を含み、所与の適用例又はデバイスに有用な有益な電子特性を得るためにp型ドーピング材料及びn型ドーピング材料を有する半導体が含まれる。半導体という用語は、半導体及び/又はドーパントの混合物を含んだ複合材料を含む。いくつかの実施形態に有用な特定の半導体材料には、Si、Ge、Se、ダイヤモンド、フラーレン、SiC、SiGe、SiO、SiO2、SiN、AlSb、AlAs、AlIn、AlN、AlP、AlS、BN、BP、BAs、As2S3、GaSb、GaAs、GaN、GaP、GaSe、InSb、InAs、InN、InP、CsSe、CdS、CdSe、CdTe、Cd3P2、Cd3As2、Cd3Sb2、ZnO、ZnSe、ZnS、ZnTe、Zn3P2、Zn3As2、Zn3Sb2、ZnSiP2、CuCl、PbS、PbSe、PbTe、FeO、FeS2、NiO、EuO、EuS、PtSi、TlBr、CrBr3、SnS、SnTe、PbI2、MoS2、GaSe、CuO、Cu2O、HgS、HgSe、HgTe、HgI2、MgS、MgSe、MgTe、CaS、CaSe、SrS、SrTe、BaS、BaSe、BaTe、SnO2、TiO、TiO2、Bi2S3、Bi2O3、Bi2Te3、BiI3、UO2、UO3、AgGaS2、PbMnTe、BaTiO3、SrTiO3、LiNbO3、La2CuO4、La0.7Ca0.3MnO3、CdZnTe、CdMnTe、CuInSe2、銅インジウムガリウムセレン化物(CIGS)、HgCdTe、HgZnTe、HgZnSe、PbSnTe、Tl2SnTe5、Tl2GeTe5、AlGaAs、AlGaN、AlGaP、AlInAs、AlInSb、AlInP、AlInAsP、AlGaAsN、GaAsP、GaAsN、GaMnAs、GaAsSbN、GaInAs、GaInP、AlGaAsSb、AlGaAsP、AlGaInP、GaInAsP、InGaAs、InGaP、InGaN、InAsSb、InGaSb、InMnAs、InGaAsP、InGaAsN、InAlAsN、GaInNAsSb、GaInAsSbP、及びこれらの任意の組合せが含まれるが、これらに限定するものではない。多孔質シリコン半導体材料は、本明細書に記述される態様に有用である。半導体材料の不純物は、(1種又は複数の)半導体材料そのもの以外の原子、元素、イオン、及び/又は分子であり、又は、半導体材料に提供される任意のドーパントである。不純物は、半導体材料の電子特性に悪影響を及ぼし得る、半導体材料中に存在する望ましくない材料であり、酸素、炭素、及び重金属を含めた金属が含まれるがこれらに限定するものではない。重金属不純物には、周期表上の銅から鉛までの元素の群、カルシウム、ナトリウム、及び全てのイオン、化合物、及び/又はそれらの錯体が含まれるが、これらに限定するものではない。
[0119]「半導体構成要素」は、任意の半導体材料、組成物、又は構造を広く指し、高品質単結晶及び多結晶半導体、高温加工を介して製作された半導体材料、ドープ型半導体材料、無機半導体、及び複合半導体材料を明らかに含む。いくつかの実施形態では、例えば、半導体構成要素が半導体デバイス又はその構成要素である。
[0120]「構成要素」は、デバイスの個々の部分を指すのに広く使用される。「相互接続」は、構成要素の一例であり、別の構成要素と又は構成要素間で電気接続を確立することが可能な導電性構造を指す。特に、相互接続は、個別の構成要素間に電気接触を確立してもよい。所望のデバイスの仕様、動作、及び適用例に応じて、相互接続は適切な材料から作製される。適切な導電性材料には半導体が含まれる。いくつかの実施形態では、例えば、構成要素が半導体デバイスの構成要素である。
[0121]その他の構成要素には、薄膜トランジスタ(TFT)、トランジスタ、電極、集積回路、回路素子、制御素子、マイクロプロセッサ、トランスデューサ、島、ブリッジ、及びこれらの組合せが含まれるが、これらに限定するものではない。構成要素は、例えば金属蒸着、ワイヤボンディング、及び固形分又は導電性ペーストの付着などにより、当技術分野で公知の1つ又は複数の接触パッドに接続されてもよい。
[0122]「中立機械平面」(NMP)は、デバイスの横b及び縦lの方向に存在する仮想平面を指す。NMPは、デバイスの垂直h軸に沿ったさらに極端な位置に在るデバイスのその他の平面及び/又はデバイスのより屈曲性ある層の内部よりも、屈曲応力をそれほど受けない。このように、NMPの位置は、デバイスの厚さ及びデバイスの(1つ又は複数の)層を形成する材料の両方によって決定される。
[0123]「同時発生」は、2つ以上の対象、平面、又は表面の相対位置、例えば、機能層、基板層、又はその他の層などの、層の内部又は層に隣接して位置決めされた中立機械平面の表面の相対位置を指す。ある実施形態では、中立機械平面は、層内の最も歪みを感受する層又は材料に対応するように位置決めされる。
[0124]「近接」は、2つ以上の対象、平面、又は表面の相対位置、例えば、歪み感受性材料の物理的性質に悪影響を及ぼすことなく所望の順応性を提供しながら、機能層、基板層、又はその他の層などの層の位置に密接に従う中立機械平面の相対位置を指す。「歪み感受性」は、比較的低レベルの歪みに応答して破砕され又はその他の理由で損なわれる材料を指す。一般に、高い歪み感受性を有し且つ結果として第1の層を破砕させ易くする層は、機能層、例えば比較的脆弱な半導体又はその他の歪み感受性デバイス素子を含有する機能層内に位置付けられる。層に近接する中立機械平面は、その層の内部に拘束される必要がなく、歪み感受性デバイス素子に対する歪みを低減させる機能的な利益が得られるように、近接して又は十分近くに位置決めされてもよい。
[0125]「一体」は、単片又は分割されていない全体として形成された対象を指す。
[0126]「直接及び間接」という用語は、別の構成要素に対する1つの構成要素の、又は別のデバイスに対する1つのデバイスの、動作又は物理的位置について記述する。例えば、別の構成要素に「直接」作用し又は接触する構成要素は、仲介物からの介入なしでそのように作用し接触する。逆に、別の構成要素に「間接的」に作用し又は接触する構成要素は、仲介物(例えば、第3の構成要素)を通してそのように作用し接触する。
[0127]「電子デバイス」は、一般に、複数の構成要素を組み込むデバイスを指し、大面積エレクトロニクス、プリントワイヤ基板、集積回路、コンポーネントアレイ、電気生理学及び/又は生物学及び/又は化学センサ、及び物理センサ(例えば、温度、加速度など)を含む。
[0128]「感知」は、物理的及び/又は化学的性質の存在、不在、量、大きさ、又は強度を検出することを指す。感知するための有用な電子デバイス構成要素には、電極素子、化学又は生物センサ素子、pHセンサ、加速度計、温度センサ、及び容量センサが含まれるが、これらに限定するものではない。
[0129]「島」は、複数の半導体構成要素を備える電子デバイスの、比較的剛性の構成要素を指す。「ブリッジ」は、2つ以上の島又は1つの島を別の構成要素に相互接続する構造を指す。本発明は、電気接触と半導体デバイス構成要素との間及び内部に設けられた伸縮性電気相互接続など、電気相互接続を含んだブリッジ構造を有する電子デバイスを含む。
[0130]「包封」は、少なくとも部分的に及びある場合には完全に、1つ又は複数のその他の構造によって取り囲まれるような、1つの構造の配向を指す。「部分的に包封された」は、1つ又は複数のその他の構造によって部分的に取り囲まれるような、1つの構造の配向であって、例えば、構造の外面の30%又は任意選択で50%又は任意選択で90%が1つ又は複数の構造によって取り囲まれるような配向を指す。「完全に包封された」は、1つ又は複数のその他の構造によって完全に取り囲まれるような、1つの構造の配向を指す。
[0131]「隣接する」は、破壊されていない配列全体を通して接触し又は接続されている材料又は層を指す。一実施形態において、デバイスの隣接層は、当初から設けられている材料又は層のかなりの部分(例えば、10%以上)を除去するように処理されていない。
[0132]「能動回路」及び「能動回路構成」は、特定の機能を発揮させるために構成された1つ又は複数の構成要素を指す。有用な能動回路には、増幅器回路、多重化回路、電流制限回路、集積回路、インピーダンス整合回路、ワイヤレス電力収穫回路、ワイヤレスデータ伝送回路、トランジスタ、及びトランジスタアレイが含まれるが、これらに限定するものではない。
[0133]「基板」は、1つ又は複数の構成要素又は電子デバイスを支持することが可能な受容面又は支持面などの表面を有する、材料、層、又はその他の構造を指す。基板に「結合された」構成要素は、基板に物理接触しており且つこの構成要素が結合している基板表面に対して実質的に移動させることができない構成要素を指す。対照的に、結合していない構成要素又は構成要素の部分は、基板に対して実質的な移動が可能になる。ある実施形態では、本発明は、基板によって支持された、任意選択で基板に物理接触しており又は基板により支持された1つ又は複数の中間体構造に物理接触している、1つ又は複数の自立半導体デバイス構成要素を有する電子デバイスを含む。ある実施形態では、本発明は、半導体デバイス構成要素を基板に独立して接続させる、ペデスタル又はペデスタルのアレイなどの1つ又は複数の構造によって支持された又は任意選択で結合された、1つ又は複数の繋留半導体デバイス構成要素を有する電子デバイスを含む。
[0134]「自立」は、デバイス又はデバイス構成要素が、基板によって、又はデバイス若しくはデバイス構成要素と基板との間に設けられた中間体構造によって、支持されているが結合されていない構成を指す。ある実施形態では、例えば、基板を、この基板により支持された自立デバイス又は構成要素に対して移動させることができる。ある実施形態では、例えば、自立デバイス又は構成要素は、自立デバイス又は構成要素を支持する基板に対して移動させることができる。いくつかの実施形態では、例えば、デバイス又はデバイス構成要素の自立構成は、基板の動き及び/又は変形をデバイス又はデバイス構成要素から切り離す。いくつかの実施形態では、例えば、デバイス又はデバイス構成要素の自立構成が、基板の伸び、圧縮、又は変形によって発生した力を、デバイス又はデバイス構成要素から切り離す。いくつかの実施形態では、自立デバイス又は構成要素は、ファンデルワールツ相互作用、双極子間相互作用、又はその他の非共有結合性相互作用など、基板表面又はその上に設けられた中間体構造との、結合性相互作用を受けることによって特徴付けられる。ある実施形態では、自立デバイス又は構成要素は、基板の支持表面に共有結合されていない。
[0135]「繋留」は、デバイス又は構成要素が、ペデスタル又はペデスタルのアレイなどの1つ又は複数の繋留構造を介して、基板に接続された構成を指す。ある実施形態では、例えば、基板は、基板によって支持された繋留デバイス又は構成要素に対して移動することができる。ある実施形態では、例えば、繋留デバイス又は構成要素は、繋留デバイス又は構成要素を支持する基板に対して移動することができる。いくつかの実施形態では、例えば、デバイス又はデバイス構成要素の繋留構成が、基板の動き及び/又は変形をデバイス又はデバイス構成要素から切り離す。いくつかの実施形態では、例えば、デバイス又はデバイス構成要素の繋留構成が、基板の伸び、圧縮、又は変形により発生した力を、デバイス又はデバイス構成要素から切り離す。いくつかの実施形態では、デバイス又は構成要素の底面の面積の20%未満、任意選択で5%未満、及び任意選択で1%未満が、基板に結合された繋留構造に共有結合される。
[0136]「ナノ構造化表面」及び「ミクロ構造化表面」は、それぞれナノメートルサイズ及びマイクロメートルサイズのレリーフ形体を有するデバイス表面を指す。レリーフ形体は、デバイス表面の実質的に隣接する平面から長さxを伸びる。構造化表面の定量的記述子は、原子間力顕微鏡法(AFM)によってその全てが測定され得るRmax、Ra、及び正規化粗さ(Ra/Rmax)などの表面粗さパラメータを含む。Rmaxは、最高ピークと最低バレーとの間の最大高さである。Raは、粗さ曲線から粗さ曲線までの中心線からの偏差の絶対値の平均である、中心線平均粗さである。基板又は層の表面は、本開示の目的で表面が100nm以下のRa値を有する場合に「実質的に滑らか」である。表面が、100nmよりも大きいRa値を有する場合、表面は、本開示の目的で「構造化表面」と見なされる。
[0137]「誘電体」は、非導電性又は絶縁性材料を指す。実施形態において、無機誘電体は、実質的に炭素を含まない誘電体材料を含む。無機誘電体材料の特定の例には、窒化ケイ素、二酸化ケイ素、及び非共役ポリマーが含まれるが、これらに限定するものではない。
[0138]「ポリマー」は、共有化学結合によって接続された繰返し構造単位から構成された高分子、又は高分子量によってしばしば特徴付けられる1つ若しくは複数のモノマーの重合生成物を指す。ポリマーという用語は、ホモポリマー、又は単一繰返しモノマーサブ単位から本質的になるポリマーを含む。ポリマーという用語は、コポリマー、又は2つ以上のモノマーサブ単位から本質的になるポリマー、例えばランダム、ブロック、交互、セグメント化、グラフト、テーパー、及びその他のコポリマーも含む。有用なポリマーには、非晶質、半非晶質、結晶質、又は部分結晶質状態にあってもよい有機ポリマー又は無機ポリマーが含まれる。連結されたモノマー鎖を有する架橋ポリマーは、いくつかの適用例で特に有用である。方法、デバイス、及び構成要素で使用可能なポリマーには、プラスチック、エラストマー、熱可塑性エラストマー、弾性プラスチック、熱可塑性樹脂、及びアクリレートが含まれるが、これらに限定するものではない。例示的なポリマーには、アセタールポリマー、生分解性ポリマー、セルロースポリマー、フルオロポリマー、ナイロン、ポリアクリロニトリルポリマー、ポリアミド−イミドポリマー、ポリイミド、ポリアリーレート、ポリベンズイミダゾール、ポリブチレン、ポリカーボネート、ポリエステル、ポリエーテルイミド、ポリエチレン、ポリエチレンコポリマー及び修飾ポリエチレン、ポリケトン、ポリ(メチルメタクリレート)、ポリメチルペンテン、ポリフェニレンオキシド及びポリフェニレンスルフィド、ポリフタルアミド、ポリプロピレン、ポリウレタン、スチレン系樹脂、スルホン系樹脂、ビニル系樹脂、ゴム(天然ゴム、スチレン−ブタジエン、ポリブタジエン、ネオプレン、エチレン−プロピレン、ブチル、ニトリル、シリコーンを含む。)、アクリル、ナイロン、ポリカーボネート、ポリエステル、ポリエチレン、ポリプロピレン、ポリスチレン、ポリ塩化ビニル、ポリオレフィン、又はこれらの任意の組合せが含まれるが、これらに限定するものではない。
[0139]「エラストマースタンプ」及び「エラストマー転移デバイス」は、同義に使用され、材料を受容すると共に転移させることができる表面を有するエラストマー材料を指す。例示的なエラストマー転移デバイスには、スタンプ、モールド、及びマスクが含まれる。転移デバイスは、供与体材料から受容体材料への材料の転移に対する影響及び/又は促進をもたらす。
[0140]「エラストマー」は、伸長し又は変形することができ且つ実質的な永続的変形なしにその当初の形状に戻ることができる、ポリマー材料を指す。エラストマーは、一般に、実質的に弾性の変形を受ける。有用なエラストマーには、ポリマー、コポリマー、複合材料、又はポリマー及びコポリマーの混合物を含んだものが含まれる。エラストマー層は、少なくとも1種のエラストマーを含む層を指す。エラストマー層は、ドーパント及びその他の非エラストマー材料を含んでいてもよい。有用なエラストマーには、熱可塑性エラストマー、スチレン系材料、オレフィン系材料、ポリオレフィン、ポリウレタン熱可塑性エラストマー、ポリアミド、合成ゴム、PDMS、ポリブタジエン、ポリイソブチレン、ポリ(スチレン−ブタジエン−スチレン)、ポリウレタン、ポリクロロプレン、及びシリコーンが含まれるが、これらに限定するものではない。いくつかの実施形態では、エラストマースタンプはエラストマーを含む。例示的なエラストマーには、シリコン含有ポリマー、例えばポリシロキサンであって、ポリ(ジメチルシロキサン)(即ち、PDMS及びh−PDMS)、ポリ(メチルシロキサン)、部分アルキル化ポリ(メチルシロキサン)、ポリ(アルキルメチルシロキサン)、及びポリ(フェニルメチルシロキサン)を含めたもの、シリコン修飾エラストマー、熱可塑性エラストマー、スチレン系材料、オレフィン系材料、ポリオレフィン、ポリウレタン熱可塑性エラストマー、ポリアミド、合成ゴム、ポリイソブチレン、ポリ(スチレン−ブタジエン−スチレン)、ポリウレタン、ポリクロロプレン、及びシリコーンが含まれるが、これらに限定するものではない。ある実施形態では、ポリマーがエラストマーである。
[0141]「共形可能」は、デバイス、材料、又は基板が任意の所望の輪郭プロファイル、例えばレリーフ形体のパターンを有する表面との共形接触を可能にする輪郭プロファイルを採用するように十分低い屈曲剛性を有するデバイス、材料、又は基板を指す。
[0142]「共形接触」は、デバイスと受容表面との間に確立された接触を指す。一態様では、共形接触では、デバイスの1つ又は複数の表面(例えば、接触面)の、表面の全体形状への巨視的適合がなされる。別の態様では、共形接触では、デバイスの1つ又は複数の表面(例えば、接触面)の、空隙を実質的に含まない密接な接触をもたらす表面への微視的適合がなされる。ある実施形態では、共形接触は、密接な接触が実現されるように、例えばデバイスの接触面の表面積の20%未満が受容面に物理的に接触せず、又は任意選択でデバイスの接触面の10%未満が受容面に物理的に接触せず、又は任意選択で、デバイスの接触面の5%未満が受容面に物理的に接触しないように、デバイスの(1つ又は複数の)接触面の、(1つ又は複数の)受容面への適合を含む。
[0143]「ヤング率」は、所与の物質に関する応力と歪みとの比を指す、材料、デバイス、又は層の機械的性質である。ヤング率は、方程式:
によって得ることができ、式中、Eはヤング率であり、L
0は平衡長であり、ΔLは印加応力下での長さ変化であり、Fは加えられた力であり、Aは、表面に力が加えられた面積である。ヤング率は、方程式:
を介してラーメ定数を用いて表してもよく、式中、λ及びμは、ラーメ定数である。高ヤング率(又は高弾性率)及び低ヤング率(又は低弾性率)は、所与の材料、層、又はデバイスにおけるヤング率の大きさの相対的記述子である。いくつかの実施形態では、高ヤング率は、低ヤング率よりも大きく、好ましくはいくつかの適用例に関して約10倍大きく、より好ましくはその他の適用例に関して約100倍大きく、さらにより好ましくはさらにその他の適用例に関して約1000倍大きい。ある実施形態では、低弾性層は、100MPa未満のヤング率を有し、任意選択で10MPa未満、任意選択で、0.1MPa〜50MPaの範囲から選択されたヤング率を有する。ある実施形態では、高弾性層は、100MPa超のヤング率を有し、任意選択で10GPa超であり、任意選択でヤング率は1GPa〜100GPaの範囲から選択される。
[0144]「不均質ヤング率」は、空間的に変化する(例えば、表面位置と共に変化する。)ヤング率を有する材料を指す。不均質ヤング率を有する材料は、材料全体に関する「バルク」又は「平均」ヤング率に関して任意選択で記述され得る。
[0145]「低弾性率」は、1MPa以下、0.5MPa以下、又は200kPa以下のヤング率を有する材料を指す。低弾性材料は、1MPa〜1KPa、又は0.5MPa〜1KPa、又は200KPa〜1KPa、100KPa〜1KPa、又は50KPa〜1KPaの範囲から選択されるヤング率を有していてもよい。
[0146]「屈曲剛性」は、印加された屈曲モーメントに対する材料、デバイス、又は層の抵抗を記述する、材料、デバイス、又は層の機械的性質である。一般に、屈曲剛性は、材料、デバイス、又は層の、弾性率と領域慣性モーメントとの積と定義される。不均質屈曲剛性を有する材料は、任意選択で、材料の層全体に関する「バルク」又は「平均」屈曲剛性として記述されてもよい。
[0147]「空間的にオフセット」は、形体が完全には重なっていない構成における、単位セルの形体の配置構成を指す。例えば、一実施形態では、空間的にオフセットされた単位セルである単位セルの形体は、互いに対して回転している。例えば、実施形態では、空間的にオフセットされた単位セルである単位セルの形体は、互いに対して並進している。例えば、一実施形態では、空間的にオフセットされた単位セルである単位セルの形体は、互いに対して回転し並進している。ある実施形態では、空間的にオフセットされた単位セルの形体は、平面内に又は互いに異なる高さで位置決めされる。ある実施形態では、空間的にオフセットされた単位セルの形体は、その他の隣接する単位セルの場合とは異なるセル間の空間長を保有する。実施形態では、空間的にオフセットされた単位セルの形体は、全ての単位セルの配置構成全体が直線にならないように配置構成される。
[0148]図1A、1B、及び1Cは、本発明の回路、デバイス、及びデバイス構成要素に有用な2次元空間幾何形状の例を提示する。図1Aは、電気相互接続又は電極(完全に結合された、選択的に結合された、又は自立している)101が、円弧形状の蛇行セグメントを含んだばね内蔵ばね幾何形状102を有する電気相互接続又は電極によって置き換えられている、3つの実施形態を示す。これらの実施形態は、多数の1次単位セルが特定の構成に配置構成されて2次幾何形状を生成している幾何形状を提供するための、本発明の態様の有用性を示す。ばね内蔵ばね幾何形状102を有する相互接続は、実施形態において空間充填又は擬似空間充填構成を採用する。
[0149]図1Bはさらに、1次元蛇行馬蹄ライン及び2次元蛇行馬蹄ラインのメッシュに統合された自己相似幾何形状の概念を示す。曲線111は、自己相似幾何形状を含み、1次湾曲幾何構成が、複数の円弧形状と空間的にオフセットされたセグメントとを一連の構成にされたものを含んで2次湾曲構成を形成するように配置構成され、その結果、ばね内蔵ばね幾何形状の形成が得られる。曲線112は、1次構成の円弧角が増大し、その結果、曲線による空間充填の増大と、経路長全体の増大と、伸縮性メカニズムの増強とをもたらし、それと共に2次湾曲構成及びばね内蔵ばね幾何形状が依然として維持される実施形態を示す。曲線113及び114は、伸縮性2D(2次元)メッシュ幾何形状を生成するための、多数のばね内蔵ばね幾何形状の重なり配置構成を示す。曲線114の1次曲率の円弧角は、曲線113に比較して増大し、その結果、曲線114によって、空間充填が全体的にさらに増大し且つ伸縮性が増強される。図1Bで実証されたこれらの1D(1次元)ライン及び2D(2次元)メッシュは、伸縮性1D(1次元)及び2D(2次元)構造の特定の実施例であり、本発明の幾何形状は、ある範囲の1D(1次元)及び2D(2次元)構造に一般的であることが、当業者に明らかにされよう。
[0150]図1Cは、ペアノ型曲線に関する3つの異なるサイズスケールでの自己相似を示す、反復幾何形状の概略図を提供する。上部パネルでは、曲線は、1次単位セル121の側面に対応しているサイズ寸法L1によって特徴付けられる。1次単位セルは、単位セルの左下と右上との間に全体接続が提供されるように、且つ単位セルの左下と右上との間の直線距離よりも長い経路長を含む、空間的にオフセットされた構成に配置構成された円弧形状セグメントを持つ、折り畳まれた幾何形状を含む。中間パネルでは、単位セルのサイズが約1/3に縮小されて特徴的なサイズ寸法L2をもたらし、9個の単位セルが一連の構成に配置構成されて、個々の単位セル121の幾何形状に類似した構成を有する2次幾何形状122を提供し、2次幾何形状の左下と右上との間に全体接続を提供し、1次単位セルの経路長と左下から右上までの2点間直線距離とに比べて長い経路長をもたらす。下部パネルでは、単位セルのサイズがさらに約1/3に縮小されて特徴的なサイズ寸法L3をもたらし、9個の2次単位セル(又は81個の1次単位セル)が一連の構成に配置構成されて、2次幾何形状122及び1次幾何形状121に類似した構成を有する3次幾何形状123を提供し、この場合もやはり、左下と右上との間に全体接続を提供し、1次単位セルの経路長と左下から右上までの2点間直線距離とに比べて著しく長い経路長をもたらす。ここで、より高次の幾何形状は、より低次の幾何形状に比べ、曲線によって空間充填を増大させる。この単位セル及び曲線構成の場合、幾何形状の追加の反復物が考えられる。例えば、本発明者らがこの特定のフラクタルを反復させるとき、本発明者らは、個々のN−1番目のサブ単位セルをx軸又はy軸のいずれかの向きに配置する選択肢を有し、その結果、多くのペアノ変形例が得られる。ある実施形態において、例えば、連続する反復物それぞれに関して約1/3に収縮する単位セル収縮の特徴的なサイズ寸法、及び9倍に増大する各連続次数の幾何形状を構成する1次単位セルの数に伴って、経路長が約9倍に増大する。
[0151]本発明は、下記の非限定的な実施例によってさらに理解することができる。
実施例1:伸縮性エレクトロニクスに関するフラクタル設計概念
[0152]伸縮性エレクトロニクスは、軟質材料及び曲線状表面と統合するその独自の能力によって、従来のウエハ及び回路基板技術の範囲を超える適用例で基礎を提供する。可能性の最終的な範囲は、先進の電子機能及び順応性あるメカニズムを同時に提供する、デバイスアーキテクチャの開発に関して予測される。この実施例は、決定的フラクタルモチーブにパターニングされ且つエラストマーに結合された硬質電子材料の薄膜が、伸縮性デバイス設計における重要な示唆を示す珍しいメカニズムを可能にすることを示す。特にこの実施例は、ペアノ、ギリシャ十字、Vicsek、及びその他のフラクタル構成の有用性によって、金属、ポリマー、及び単結晶質シリコンを含めた半導体の空間充填構造が、電気生理学的センサ、精密モニタ及びアクチュエータ、及び無線周波数アンテナに関して得られることを実証する。これらのデバイスは、皮膚上への共形載置を支持し、磁気共鳴撮像下での不可視性などのバイオ医薬に関連した性質を有する。結果は、フラクタルベースのレイアウトを、硬軟材料の統合のために設計戦略として広く展開できることを示唆している。
[0153]伸縮性エレクトロニクスの分野は、益々関心を集めており、材料科学における基本的課題によって且つバイオ医薬などの領域における適用余地によって刺激を受けている。中心となる難題は、大きな歪み変形に対する低弾性率の弾性応答を提供するシステムを備えた高性能の電子機能を実現することにある。この問題に対して最も首尾良くなされる手法の2つは、一般的な意味で先端複合体を活用する。その第1では、導体又は半導体ナノ材料(即ち、ナノワイヤ、ナノチューブ、又はグラフェン)をエラストマー母材に分散させる。ここで、分布された接点の網状構造を含めた3次元(3D)構造が、自発的に形成されるが、全体的な装荷率以外の重要な変数の直接制御は限定される。第2では、2次元(2D)フィラメント状メッシュレイアウトにリソグラフィによって画定された電子材料の薄層を使用することによって、決定的に生成された代替の種類の複合体を活用する。この手法の利点には、システムの内側でも外側でも適正な電気接触が可能になるように、多数の高性能材料プラットフォームを高空間解像度及び工学的制御と共に同時統合する能力が含まれる。伸縮性エレクトロニクスにおける3D(3次元)ランダム及び2D(2次元)決定的複合体の両方の本質的な目的は、能動デバイスにおける硬質構成要素の高負荷と、軟質母材により占有される全体的なメカニズムとを、伸縮性応答のために組み合わせることである。この目的は、従来の複合体工学に関連した目的とは対照的であり、したがって、代替の手法が求められている。
[0154]この実施例は、従来の3D(3次元)網状構造における挙動を決定することが公知であり且つ人体を含めた生体系において普及しているフラクタル幾何形状の概念が、2D(2次元)決定的システムにおいて首尾良く活用することができ、先進伸縮性エレクトロニクスで重要な機能的結果をもたらすことを示す。フラクタルベース構造は、自己相似性によって記述することができ:小セクションへの細分によって、全体に似ている幾何形状を持つ小片が得られる。周期的蛇行形状の先に調査された網状構造に比べ、フラクタルデザインは、選択された方向に向上された弾性歪みを吸収するように、且つ2軸、半径方向、及びその他の変形モードを支持するように、設計製作することができる。さらに、トポロジの選択は、多数の構造の統合及び嵌合を通して特定の電子適用例に調整することが可能な、ラインからループまでの豊富な範囲に跨る。図2は、ライン(コッホ、ペアノ、ヒルベルト)からループ(ムーア、Vicsek)及び分岐様メッシュ(ギリシャ十字)までの6つの代表的な例を示す。結果は、有限要素法(FEM)及び実験的実証の両方を通して、可能性の多様性を示す。これらの有限反復曲線における近似フラクタル次元は、1.5〜2に及ぶ。これらの構造により実現された弾性引張り歪みは、それらが、前述のレイアウトに勝る重要な利点を備えた表皮電子プラットフォームを含む様々な伸縮性デバイスで使用するのに適していることを示す。
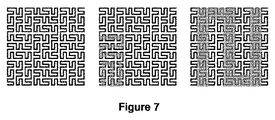
[0155]ペアノ曲線は、フラクタルベースモチーフの詳細なメカニズムを検査するためのモデルシステムを示す。これら又はその他のデザインを使用するレイアウトは、反復手法に従い:N番目のペアノ曲線を生成するために、(N−1)番目の曲線の9本のコピーを一緒に連結させて単一ラインにする。ペアノ曲線の第1の3つの反復物の図示が、図3のパネル(a)に見られる。根本をなすメカニズムを獲得する物理的解釈の後、1次元ばねのセクションとして第1の反復曲線幾何形状について考慮する。自己相似により、より高次のペアノ曲線は、多数の長さスケール(図7)でばね様モチーフを含有する。さらに、これらのモチーフのそれぞれは、垂直に(y軸)又は水平に(x軸)に配向することができる。したがって、ペアノ幾何形状は、直線をコンパクトな伸縮性レイアウトに系統的に「折り畳む」ための、設計計量法を提供する。これらのワイヤのメカニズムをさらに増強するために、数学的に画定されたペアノ曲線において円弧セクションを鋭い角と置き換える(図3、パネル(b))。一般に、馬蹄形蛇行構造の弾性メカニズムは、円弧セクション角の増大と共に改善する(図19)。図3、パネル(a)で特徴付けられたペアノ曲線は正方形の領域を満たすが、異なる反復順序のものを一緒に連結して、任意の形状の空間を満たすことができる。実証として、図3、パネル(c)〜(f)は、空間充填ワイヤで形成された「ILLINOIS」という単語を示し、各文字は、1次及び2次ペアノ曲線の組合せからなる。図は、「N」のセクションを詳細に見たものである。電極は、例えば身体の特定の形体に一致するように構成することができる。
[0156]図3、パネル(a)のペアノ曲線は、一組の変形例のみ表し;任意のN次曲線の(N−1)番目の単位セルは、垂直に又は水平に配向することができるので(図8)、多くのその他のものが存在する。2次曲線は、272個の独自のレイアウトのみ有し、それぞれは、全く異なる機械的性質を持つものである。エラストマーに結合された金ワイヤからなる5つの異なる2次レイアウトの数値シミュレーションは、メカニズムとレイアウトとの間の関係を調査する。レイアウトは、全垂直から全水平にまで及ぶ(図18)配向を持つ単位セルを含有する。最大主歪み基準は、構成材料の確立されたパラメータと矛盾することなく、塑性降伏の開始として最大弾性伸縮性を定める。図18は、x軸及びy軸に沿った1軸変形に関して計算された、この量をまとめる。結果は、全てが同様に配向している単位セルを持つペアノレイアウトが、単位セル方向に沿った1軸伸縮性を最大限にすることを示す。交互配向を持つ単位セルを含有する「ハーフアンドハーフ」ペアノレイアウトは、それぞれ16%及び13%でx軸及びy軸に沿って支持された最大歪みのバランスを取る。そのような性質は、両方の軸に沿って伸縮するデバイスに十分適している。全単位セルサイズへの調節は、これらの構造のメカニズムを増強することができる(図20)。3次ハーフアンドハーフレイアウトは、x軸及びy軸に沿ってそれぞれ32%及び28%の伸縮性をもたらす(図9)。反復次数によるこの改善は、円弧セクションの幾何学的スケーリングが組み合わされた効果に起因し、ワイヤの長さが増大し、より高次のばね様モチーフが付加される。ここで伸縮性は、皮膚の弾性メカニズムに関する一般的な上限である20%よりも十分高い。
[0157]ポリイミで覆われ且つエラストマー膜に完全に結合された、金属線の2次及び3次ハーフアンドハーフペアノレイアウトからなる実験構造を、数値解析と十分比較する(詳細については方法を参照)。ポリイミドクラッディングは、金属における歪みの局在化を遅らせ、それによって機械試験でのサンプルの降伏及びコンシステンシーが増強される。3つのサンプルが、各フラクタル次元及び伸縮の軸に関して試験される。機械的特徴付けでは、1軸引張り伸縮中に行われる4点プローブ技法により、約0.01オームの精度で抵抗変化を測定する。弾性レジームでは、歪みなしの状態と高レベルの最大歪み状態との間でのサイクリング前後でのワイヤ抵抗は(差は、「微分抵抗」と定義される。)、変化しない。塑性変形開始時に、ワイヤは、抵抗依存性幾何学変化を受け、その結果、小さいが測定可能な微分抵抗が得られる。張力計による応力−歪み応答の測定に基づいて塑性を特徴付ける従来の手法は、これらのシステムにおけるエラストマー基板のメカニズムが意図的に応答を支配するので適切ではない。
[0158]図4a〜4f及び図9は、これらの調査の結果をまとめる。個々の代表的なデバイスから測定された微分抵抗は、各プロットで一緒に見られる。2次及び3次ペアノ構造における誤差棒は、それぞれ3.7e−5及び3.3e−5の大きさを有し;以下の補遺セクションは、これらの誤差の起源について論じる。局所温度の同時測定は、バックグラウンド温度の変動により、抵抗の変化を説明し較正する(下記の補遺セクション参照)。測定は、x軸及びy軸に沿って伸縮される2次ペアノ構造の場合、弾性から塑性変形への転移がそれぞれ16〜20%及び12〜16%の範囲で生じることを示す。3次ペアノ構造は、x軸及びy軸の両方に沿って伸縮される場合、27〜32%の範囲で弾性から塑性への転移を受ける。1軸伸縮性のこれらの値は、数値解析と矛盾していない。FEM歪みマップ(図4c及び図4d)は、歪みが特に大きく且つ故障が生じる、サンプルにおける機械的「ホットスポット」の位置を特定する。デバイスメカニズムのさらなる増強は、これらホットスポットの詳細な幾何形状を最適化することによって可能である。
[0159]予歪状態のエラストマーに結合されたフラクタルベース構造は、より高いレベルの弾性変形が可能である。40%の予歪を持つエラストマー基板上に完全に結合された2次全垂直ペアノ構造は、この概念を実証する。最大印加歪みの異なるレベルに関する微分抵抗を、図10に示す。ここで弾性から塑性変形への転移は、基板が、予歪なしに調製されたサンプルの場合よりも著しく高い60〜70%の範囲で歪んだ場合に生じる。予歪を使用するスキームは、2軸、半径方向、又はその他のタイプの変形にまで拡げることができる。
[0160]予歪の使用によりメカニズムを増強させるこの概念は、半導体を含めた広範な材料に一般的である。2つの異なる2次ペアノレイアウトを有し且つ40%予歪エラストマー基板に結合された、単結晶シリコンナノ膜(Si NM)の薄膜は、概念の証明を提供する。予歪状態では、膜において計算された圧縮応力は、シリコンに関する弾性変形のレジーム内に十分包含される。図4g及び図4hは、サンプルのミクロスケールX線コヒーレントトモグラフィ(ミクロXCT)画像を、対応するFEM結果と共に示す。知見は、最大主歪みがシリコンにおいて1%である場合、全垂直及びハーフアンドハーフ構造がそれぞれ105%及び63%だけ弾性的に歪むことができることを示す。ハーフアンドハーフ構造から電気的に測定された破断点(図11)は、FEM結果に一致している。ミクロXCT及びFEM画像は共に、ミクロスケールの座屈を明らかにし;このタイプの変形モードは、Si NMが応力を消散させる能力を改善する。そのような挙動は、限られた範囲のNM厚さに関してのみ持続する。FEMシミュレーションは、膜厚の増大と共に、NM転移が、皺が寄るレジームからミクロスケールの座屈に至り最終的には全体に座屈が生じることを示し;さらに、ミクロスケールの座屈レジームが、最大弾性メカニズムをもたらすことを示す(図12a及び図12b)。したがって、硬軟システムの弾性特性の最適化は、ミクロメカニズムに対して慎重な注意を要する。
[0161]これら及びその他のフラクタルレイアウトには、様々な適用例で有用性がある。1つは、脳(脳波(EEG))、心臓(心電図(ECG))、及び筋肉(筋電図(EMG))の電気生理学的プロセスを測定するための、皮膚載置型電極である。電極と皮膚との間のインピーダンスを最小限に抑えるため、且つ測定された信号対雑音比を最適化するために、電極は、共形皮膚接触と高い面積カバレッジとの両方を必要とする。ニューロンと直接インターフェースをとる電極は、さらに、面積内に大きい視野計を有することから利益を得る。これらの必要性は、2次元で空間を満たす十字構造の階層からなるギリシャ十字フラクタルの変形例を使用して、効果的に対処することができる(図14)。このデザインは、高レベルの接続性を留め、任意の2点間の抵抗を最小限に抑える。また、ライン破壊などの構造の欠陥は、デバイス性能に著しい影響を及ぼす可能性を低減させるが、これは実際の堅牢な長期にわたる健康モニタリングに望ましいものである。これらの幾何形状は、閉ループを排除するようにさらに設計することができ(図14)、したがって、電極ワイヤのレイアウトの縁部は単一連続ラインを形成するようになる。抵抗温度感知/加熱素子に統合型電極(記録、接地、及び参照構成要素を一緒に)を組み込んだ多機能性デバイスは、この特徴を活用する(図5a)。温度センサは、ギリシャ十字電極の縁部に沿って走る金属の絶縁ラインからなる。図5b〜5fは、異なるモード下(加熱、温度感知、ECG測定)での、代表的なデバイス及びその動作を示す。これらの乾式電極により測定されたインピーダンス及び信号対雑音比を、従来のゲルベース電極の場合と好ましく比較すると、それらは高品質の皮膚載置型電気生理学的測定に適していることが示される。温度測定の精度(約20mK)は、赤外線カメラの場合に十分匹敵する。
[0162]伸縮性無線周波数アンテナは、フラクタルデザインの概念から利益を得る別の種類のデバイスである。フラクタルアンテナは、共鳴波長に対してコンパクトな空間スケールにおいて多帯域動作を支持することができるので、関心が持たれる話題である。フラクタルの適切な選択は、伸縮性基板上に載置された場合、この特徴だけでなく、魅力ある弾性メカニズムも提供する。円弧セクションが鋭い角と置き換わるVicsek曲線ループアンテナは、モデルシステムを提供する。アンテナは、ポリイミドが積層され且つ1mmの厚さのエラストマー基板に結合された銅トレース(厚さ3μm)からなる。銅の厚さは、ギガヘルツ周波数での銅の表皮深さ(約2μm)と同等である。歪みなしのアンテナに関する反射減衰量スペクトルは、1.7GHz付近で基本的なモードを示すと共に(図6a)共鳴時に42オームのインピーダンスを示す。共鳴時のアンテナの全長は、約λ0/6であり、但しλ0は、自由空間波長であり、この特定のフラクタルレイアウトのコンパクトな性質を反映している。デバイスが歪むにつれ、その基本周波数及び入力インピーダンスは僅かにシフトする。無響室内での遠視野測定は、追加の情報を提供する:0%及び30%の歪みでの(図6c)基本モードに関するデータは、明らかな双極子様パターンを示す。非伸縮性及び伸縮性の両方のデバイスに関して実現された利得は、−2〜0dBに及び、これは細い銅線の抵抗損に起因して理想的な双極子の場合よりも僅かに少ない。反射減衰量及び遠視野プロファイルのシミュレーションは実験と一致している(図17b)。
[0163]フラクタルパターンの好ましいRF特性及びメカニズムから利益を得ることができる別の適用例は、磁気共鳴撮像(MRI)に適合する電極構造にある。円柱ファントムに載置され且つ3Tesla Trioヘッドスキャナ(Siemens Instrument)でスキャンされた銅箔サンプルは、実証を行う。比較の目的で、サンプルは、パターニングされていないシート、曲がりくねったメッシュの2つの変種、重ねられた垂直ライン及び水平ラインと一緒に、3タイプのフラクタルを含む。メッシュ及びフラクタルパターンの充填率は、ほぼ同じである(約25%)。ここで使用される磁場強度では、共鳴RFパルス周波数が約123MHzである。図6dは、スピンエコー(パラメータは、下記の補遺セクションに在る。)を使用して得られた軸断面スキャンを示す。水ベースのファントムは、その高い水素濃度により白色に見える。MRI画像は、パターニングされていない被膜及びメッシュのサンプルの付近で明瞭な影を示す。逆に、フラクタルサンプルは、顕著な歪み又はシャドーイングを示さない。循環電流及びそれに伴う放熱及び信号損失をもたらす、RF放射線とサンプルとの間の静磁結合は、これらの相違を説明する。メッシュは、高度に相互接続された金属の閉ループからなるので、RF放射線に結合し;一方、フラクタルは、閉ループを含有せず、RF放射線に結合せず、MRIで見ることはできない。この解析は、フラクタルベースのデザインが、MRI適合性の皮膚載置型又は埋め込み型電子デバイスへのルートをもたらすことを示唆する。
[0164]まとめると、フラクタルベースのレイアウトは、バイオ医薬システムに適切な広範なデバイスを含めた伸縮性エレクトロニクスにおいて、新しい設計の機会をもたらす。ここで難題の1つは、これら複合材料の機械的性質を評価すること、及びそれらの弾性及び塑性メカニズムを厳密に明らかにすることである。高精度の電気機械測定と3次元FEMシミュレーションとの組合せでは、基本的な機械応答と、幾何形状に対するそれらの依存性とを理解し、特定の変形モードで活用することができる。この調査は、フラクタルレイアウトと、伸縮性材料の設計製作に広く適用可能なメカニズムとの間の一般的な関係を示唆する。
[0165]方法。表皮デバイス製作。温度センサ及び加熱器を含む金属ベースのデバイスの製作では、最初に、UV処理済みのPDMSコーティング付きSiウエハに、液体ポリイミド(PI)をスピンコーティングし、硬化する。電子ビーム蒸着は、クロム(4nm)及び金(300nm)の層をもたらす。金属のパターニング、エッチング、及びポリイミドの第2の層の付着の後、フォトレジストマスク及び酸素プラズマでのエッチングは、ポリイミドで包封されたデバイスを画定する。ワイヤの全ては70μmの幅であり、ポリイミド層はそれぞれ1.2μmの厚さである。水溶性テープ(3M)は、蒸着されたクロム−シリカ結合層を使用してエラストマー(0.5mmの厚さ、Ecoflex又はSolaris、Smooth−on Inc.)に共有結合している金−ポリイミド構造を回収する。エラストマーのUV放射線による前処理は、シリカとエラストマーとの間の共有結合を促進させる。デバイスの結合パッドに取着されたACFケーブル(Elform、USA)は、アクセス可能な電気的アドレッシングを可能にする。追加のポリイミドエッチングステップを有する同じプロセスは、電気生理学的感知用に、開放金属ベースフラクタル電極に適用される。
[0166]1μmの厚さの二酸化シリコン層上にある260nmの厚さのpドープシリコンからなるSOIウエハが、Si NMサンプルの開始点である。Si NMをハンドルウエハから切り離すため、HF湿式エッチングは、膜内に画定された3μmの幅の穴のアレイを通して、下に在る二酸化シリコンを溶解する。PDMSスタンプは、膜をポリイミド被膜上に移し、フォトレジストマスク及び乾式エッチングプロセスは、膜を様々なペアノレイアウトに画定する。金ワイヤは、デバイスを電気的にアドレス指定し、上記と同じ転写ステップがデバイスを完成させる。
[0167]アンテナ製作。出発材料は、銅担体(35μm;Olin Brass)上に銅箔(3μm)があるものである。箔上にスピンキャストされ硬化させたポリイミドは、箔−ポリイミド積層体をもたらし、これをPDMSコーティング付き基板上に載置することで、銅担体の除去が可能になる。フォトレジストマスク、湿式銅エッチング、及び酸素プラズマ乾式エッチングが、アンテナをパターニングする。
[0168]フラクタルベースの金属ワイヤのシミュレーション(図2、4、及び18に提示される。)。FEMは、理論的な変形、弾性から塑性への転移、及び構造の破断をもたらす。エラストマー基板は、FEMプログラムにおいて8ノード6面体ブリック固体素子C3D8Rを用い、PI/Au/PI層状化幾何形状の細いワイヤは、複合レイアップのセクションを持つ4辺形シェル素子S4Rを用いる。ワイヤの全ては70μmの幅であり、各面が1.2μmの厚さのポリイミド層によって挟まれた300nmの厚さの金層からなる。全パターン面積は、7×7mmであり、50kPaの弾性率で0.5mmの厚さのエラストマーに完全に結合される。固体素子は物理的に一緒に結合され、したがって、その接着されたシェル素子と、ノードを共有する。78GPaのヤング率、0.44のポアソン比、0.3%の降伏歪み、及び5%の破断歪みとの理想的な弾性−塑性構成関係は、Auの機械的挙動について記述する。
[0169]電極及び温度センサの試験。ギリシャ十字電極は、トルソからのECG信号を記録する。Scotchテープ及びアルコールスワブは、角質層を剥奪させ、汚れ又は粒子を除去して、水和及び表面インピーダンスの影響を低減させる。ここで、測定電極と参照電極(中心間距離が約7mm離れている。)との間に位置付けられた接地電極は、共通ゼロ電位を定める。測定された信号は、無線により受信器に伝送され、60Hzノッチフィルタ及び低域Butterworthフィルタ(BioRadio 150、Cleveland Medical Devices、USA)を使用する商用ソフトウェアが、解析を終了させる。フラクタル温度センサは、機械試験セクションで記述されたものと同じ4点プローブ技法を使用して動作する。IRカメラ及びホットプレートは、デバイスの較正に使用されるdV/dTをもたらす。デバイスは、スプレーバンデージ技法により、エラストマー裏打ち層なしで皮膚上に直接載置される。
[0170]図18。5つの異なるペアノベースワイヤ構造の弾性メカニズム。ワイヤの任意のセクションにおける最大主歪み基準を0.3%として、5つの異なる2次ペアノレイアウトのエラストマー上に載置された金属線の伸縮性を計算した。レイアウトは、「全水平」(サブ単位は全てx軸に沿って配向している。)から「全垂直」(サブ単位は全てy軸に沿って配向している。)に及ぶ。歪み基準は、ワイヤの弾性から塑性変形への転移を定める。
[0171]図19。円弧立体角の関数として、曲がりくねったワイヤに関し、1軸弾性伸縮性をシミュレートした。中欄の挿入図は、円弧立体角を定める。断面幾何形状及び材料は、図3のものに一致し、全ての構造はR=620μm及びw=70μmを有する(図S2に定められる。)。これらのシミュレーションは、これらの原始的な曲がりくねった幾何形状における円弧角の関数として、弾性伸縮性が増大することを明確に示す。したがって、ワイヤ型構造の円弧セクション幾何形状を決定的に画定することにより、メカニズムの最適化を助けることができる。
[0172]図20。ハーフアンドハーフペアノ構造に関する単位セルサイズの関数として、2軸伸縮性をシミュレートした。断面幾何形状及び材料は、図4a〜4hのものと一致し、全ての構造は、w=70μmを有する(図8に定義される。)。1.5mm〜4.5mmの間の単位セルサイズを持つ構造は、20%よりも大きい2軸伸縮性を示し、皮膚の弾性特性に適合する。
[0173]補遺情報。MicroXCTによるフラクタル幾何形状の解析。Micro X−rayトモグラフィ(MicroXCT 400、Xradia)は、様々なフラクタル構造の空間トポロジの撮像を可能にする。図2及び図4の実画像は、MicroXCTシステムから得たフラクタルパターンの構造の詳細を実証する。2つの倍率0.5×及び4×は、それぞれ構造の全体図及び拡大図を示す。追加の撮像パラメータは、40KeV X線源及び200μA電流を含み、600個の画像フレームが180度にわたって段階的に記録される。TXM Reconstructorソフトウェア(Xradia)は、画像を再構成し、視覚化ソフトウェアパッケージ(Amira 5.4.2、Visage Imaging)は、図2及び4で「グレースケール」画像をもたらす。
[0174]機械試験。エラストマーに結合された金属ワイヤの抵抗は、温度及び機械的歪みの両方の関数である。温度の寄与は、機械的歪みに起因して、金属抵抗の変化を純粋にモニタするために差し引かれる。第1のステップは、ホットプレート及びIRカメラ(FLIR SC7650)を使用して、dR/dTを得るために温度の関数として、歪んでいないフラクタルサンプルの抵抗を測定することである。30℃〜45℃の範囲で6つの抵抗点を持つ最小二乗法を使用する線形当て嵌めは、この較正を行う。機械測定それ自体の最中に、温度調節抵抗(R)は、連続的に測定された温度(T)から:
として得られる。R
デバイスは、4点測定からの、デバイスの測定された抵抗であり、T
0は、実験の開始前に設定された一定参照温度である。図9は、実験装置の詳細を示す。図10は、予歪状態の全垂直ペアノ構造に関する、FEM画像と、弾性−塑性転移点とを示す。
[0175]温度センサ及びマイクロヒータの試験。ペアノベースのレイアウトを持つワイヤには、高精度温度センサ及び加熱器の主要な構成要素として有用性がある。そのようなセンサは、機械試験に関して上記で行ったように、赤外線(IR)カメラ(A655SC、FLIR、USA)に対して較正することができる。3次ハーフアンドハーフペアノセンサの応答を、図13にプロットする。アナログ−デジタル(A/D)変換器の雑音(V
A/D)及び電気雑音(V
雑音)は、方程式:
を使用してフラクタル温度センサの精度を決定し、但しdV/dTは温度較正から得られる。フラクタル温度センサの精度は、0.022℃である。デバイスを前腕に載置し、センサ及びIRカメラで同時に温度を記録することにより、皮膚上での測定に適用できることが示される。
[0176]同じデバイスを、ジュール加熱用の精密素子として使用することができる。0%及び20%の1軸歪みの下でのデバイスの赤外線画像は、加熱が、フラクタル構造の空間充填性を示しているデバイスの面積全体にわたって均一であることを示す(図13c)。1つの適用例では、創傷回復が行われ、創傷付近への制御された熱量の送達によって、高い局所血流及び血管拡張がもたらされ、最終的に回復が促進される。これらのデバイスが温度センサとして且つ加熱器としても機能する能力は、熱伝導率などのその他の量の測定を可能にする。
[0177]フラクタルアンテナの設計及びシミュレーション。ボックスフラクタルアンテナのレイアウトは、図13に示される2次元ボックスフラクタルを利用する。ここでは、5種類の(N−1)番目の幾何形状が縮小され、一緒に接続されて、N番目の反復幾何形状を構成する。ボックスフラクタルの周辺の周りを辿るワイヤは、アンテナのレイアウトを生成し;鋭い角には丸みが付けられてメカニズムを増強させている。HFSSシミュレーションによる変形アンテナ解析は、3つのステップを必要とし:変形していないアンテナの幾何形状がアバクスに持ち込まれ、それらが所定の歪みにより数値的に伸張し、この得られた幾何形状がHFSSに持ち込まれてシミュレーションがなされる(図14)。計算されたS11パラメータの周波数及び大きさと、双極子遠視野プロファイルは、実験的に測定されたものに一致している。
[0178]MRI撮像。スピンエコー画像は、下記のパラメータを使用する:
[0179]TR 2000;TE 25;平均5;スライス25;FOV 140×140mm;厚さ:3mm;フリップ角:60度;解像度:256;部分フーリエ:5/8;帯域:130Hz/Px。
実施例2:自己相似蛇行相互接続及び統合型ワイヤレス再充電システムを持つ伸縮性バッテリ
[0180]エレクトロニクスにおける重要な傾向は、ポリマー被膜、金属箔、紙シート、又はゴムスラブなど、従来とは異なる基板の使用を可能にする、材料の開発、機械設計、及び製造戦略を含む。最後の可能性は、システムが屈曲だけではなく伸張も、場合によっては高レベルの歪み(>100%)も吸収しなければならないので、特に難題である。いくつかの手法がエレクトロニクスで利用可能であるが、持続的な難しさは、エレクトロニクスとの同時統合を可能にするために類似する機械的性質を有するエネルギー貯蔵デバイス及び電源に在る。この実施例は、活性材料のセグメント化されたデザイン及び珍しい「自己相似」相互接続構造を持つ、基板として薄い低弾性率のシリコーンエラストマーを活用する再充電可能なリチウムイオンバッテリ技術に関して、一組の材料及び設計概念を提供する。結果は、約1.1mAh/cm2の容量密度を維持しながら、300%までの可逆的レベルの伸縮性を可能にする。伸縮性ワイヤレス電力伝送システムは、直接物理接触することなく、これらのタイプのバッテリを充電する手段を提供する。
[0181]大きい歪み(>>1%)変形に対して弾性応答をもたらす種類の電子及び光電子技術の開発は、近年加速している。材料、デバイスのレイアウト、機械設計、及び製造手法の組合せが、着用可能な光起電力装置から「表皮」健康/ウェルネスモニタにまで、感受性あるロボットの皮膚にまで、軟質外科用器具にまで、且つ電子「眼球」撮像デバイスにまで及ぶ領域で、現実的な適用例に関して現在出現し始めている。多くの場合、伸縮性は、重要な可能化特性に応答する。これら及びその他の使用の多くに関し、極めて重要な必要性は、エレクトロニクスとの直接及び自然な統合を可能にするために、類似の物理的性質を持つエネルギー貯蔵デバイスに在る。多くの重要な貯蔵デバイスは、スーパーキャパシタ及びバッテリも含めて、可撓性の特徴と共に開発されている。ここで十分に薄い幾何学的形状は、所与の屈曲半径に関して厚さと共に直線的に減少する、屈曲により誘発された歪みによって(典型的には約1%以下の値)、可撓性をもたらす。一方、伸縮性は、より難しいタイプのメカニズムを表し、その場合システムは、屈曲だけではなく捩れ、伸張、圧縮、及びその他のものを含めた典型的には任意の形にある大きい歪み変形(>>1%)を吸収しなければならず、厚さは、典型的には極めて重要な因子というわけではない。CNT又はCNTが浸漬された繊維状織物の座屈薄膜を使用した伸縮性のスーパーキャパシタ、及び伸縮性の非再充電型亜鉛炭素バッテリであって導電性織布をベースにしたものは、2つの例を示している。これらの技術はそれぞれ魅力ある特徴を有するが、高貯蔵容量での再充電、大きい変形レベル(>100%)への伸長、又は外部電源とのワイヤレス電気インターフェースの確立において、多くの能力を提供しない。この実施例で提供される材料及び統合スキームは、特殊化された「自己相似」幾何形状にある、セグメント化されたレイアウト及び変形可能な電気相互接続を活用するリチウムイオンバッテリのタイプにおいて、これらの特徴を実現する。得られたデバイスは、300%の歪みまで2軸伸縮性を提供し、このときの容量密度は約1.1mAh/cm2であり、容量の損失は、再充電が20サイクルまでほとんどない。設計は、伸縮性誘導コイルの統合も可能にし、その結果、物理的な接続を必要とせずに外部電源を通した充電が可能になる。この組の属性は、伸縮性エレクトロニクスに関して企図されている多くの適用例の要件を満たす。
[0182]結果。バッテリ設計。この実施例のデバイスは、小規模貯蔵構成要素のアレイが、並外れた伸縮可能な特徴を持つフレームワークを伝導することによって接続されている、パウチセルを活用する。システムの概略図、単位セルの多層構造の分解組立図、及び「自己相似」相互接続幾何形状の表示が、以下の図21A、21B、21C、及び図25に見られる。集電器は、フォトリソグラフィによってパターニングされたアルミニウム(600nm)及び銅(600nm)の円形ディスクからなる。ポリイミドの層(PI;1.2μm)は、金属を中立機械平面の近くに配置するように、これらのディスク間の相互接続トレースを包封する(図21D及び図21E、左パネル)。薄い(0.25mm)低弾性率(60KPa)のシリコーンエラストマーのシートは、これらの構造(図21D及び図21E、中央パネル)及びバッテリのその他の構成要素を支持する上部基板及び底部基板を形成する。全体構成は、平行に電気的に接続された100個の電極ディスクの正方形アレイからなる。LiCoO2及びLi4Ti5O12をベースとしたスラリの成型パッドは、それぞれカソード及びアノードの活物質として働く(図21E及び図21E、右パネル、及び図26)。2枚のシートは、それらの間の電気不足が回避されるように且つセパレータの必要性がなくなるように、活物質の間に空間オフセットを含むよう一緒に積層される。同じシリコーンエラストマーで作製され且つシステムの周辺を巡って付着されるスペーサは、上部シートと下部シートとの直接接触を防止する。隙間に注入されたゲル電解質は、イオン輸送用の媒体を提供する。外面に結合されたアクリルオキシパーフルオロポリエーテルエラストマーの薄い包封層は、バッテリ内に水分が拡散し且つゲル内の溶媒が漏出するのを防止するのを助ける。長期動作は、例えばバッテリの外面に結合するアルミニウム/ポリイミドの座屈2重層シートからなる(図27)、より洗練されたパッケージを必要とする。材料及び製作の詳細は、方法のセクションに見られる。
[0183]デバイスは、2つの競合する設計目標:(1)活性領域の広い被覆を必要とする、高い面積容量を実現すること、及び(2)これらの領域間に大きい距離を必要とする、高い機械的伸縮性を提供することに、適応しなければならない。エラストマー基板上のレリーフの戦略的な形体は、光起電力モジュールで最近実証されたように、この難題に対する部分的な解決策を提供する。欠点は、被覆を犠牲にすることなく、約30%を超える伸縮性のレベルを実現することが、難しくなる可能性があることである。ここで、先進のデザインを持つ変形可能な相互接続に焦点を当てた、異なるが相補的な手法がとられる。特に、高いシステムレベルの伸縮性及び低い相互接続抵抗を同時に提供するために、曲がりくねった構成でワイヤの「自己相似」構造を使用するレイアウトが導入される。従来の蛇行は、直線によって接続された円形状の円弧からなる。「自己相似」デザインは、図21Cの赤色ボックスで概略的に例示されるように、単位セルから開始してこの基本的幾何形状を反復適用することによって得られる。ここで、セルのスケールを縮小し、次いでその多数のコピーを、1つの反復物に該当する当初のセルの幾何形状のレイアウトが再現されるように接続する。図21Cの黄色ラインは、このように生成された2次蛇行幾何形状を表す。より高次を設計することができ容易に実施することができるが、2次構成は、以下の詳細な実験及び理論的調査で記述されるように、ここで考えられる適用例の要件を満足させる。
[0184]「自己相似」相互接続の機械的特性。3次元(3D)有限要素解析(FEA)(以下に詳述する。)及び実験測定は、本質的なメカニズムを例示する。この目的で製作された試験サンプルは、下に在るエラストマー基板上に成型されたポストに結合する円形パッド間に、バッテリで使用されるものに一致した材料及び多層積層デザイン(PI(1.2μm)/Cu(0.6μm)/PI(1.2μm))を有する、自立多層トレースからなる。自己相似幾何形状は、極端な伸長下にあっても材料中で超低歪みを確実にする、階層座屈物理学をもたらす。検査した引張り歪みの全範囲、0%〜300%に関し、FEAにより予測された構成は、図22に示されるように、実験中に収集された光学画像に極めて十分に一致する。対称的及び非対称的座屈モードが存在する(2つのモードの詳細な例示に関しては、図28A及び28B参照)。トレースは、2本の水平直線によって接続された、曲がりくねったワイヤの3つのカラムからなる。本発明者らは、第1のレベルとして各カラム内の「短」波長蛇行に該当する構成に言及し;第2のレベルは、「長」波長を有する大規模蛇行形状に該当する。対称的座屈モードの場合(図28A)、左及び右カラムは、垂直方向に沿って主に全体的な屈曲変形を受け、その結果、蛇行ワイヤの全中間カラムの集合的な上向き運動が生じる。この意味において、平面外変位は、図28Aの「正面」の中心線(x=0)に対して対称的である。非対称的座屈モードの場合(図28B)、左及び右カラムの蛇行は、垂直方向に沿って全体的な捩れ変形を主に受ける。ここで、中央の蛇行の2つの端部は反対方向に移動する(即ち、一方が上に移動し、他方が下に移動する。)。この場合、平面外変位は、図28Bの「正面」の中心線(x=0)に対して非対称的である。対称(0.078%)及び非対称(0.087%)モードに関してFEAにより得られた臨界的座屈歪みは、その他全ての座屈モードの場合(>0.172%)よりもさらに低い。この結果は、これらの2つのモードのみの実験観察に一致している。両方とも、伸長に関連した物理学では、「規則正しいラベリング」のメカニズムが行われ、これはここで調査された実施例に関して十分に定められた臨界的座屈歪み、約0.08%での第2のレベルで開始する。次に、第2のレベルは、印加される歪みが0.08%から約150%に増大するにつれ、屈曲及び捩れを介して徐々に「解かれ」、その最中は、第1のレベルにおいてさらなる変形は本質的にない。第1のレベルにある運動は、この場合は約150%の印加歪みに該当する第2のレベルがほぼ完全に伸びた場合に開始する。第1のレベルの蛇行の「ラベリング」がその終わりに近付くにつれ、材料の歪みは急速に増大し始め、それによって伸縮性の実用限界が定められる。
[0185]この限界よりも低い印加歪みの場合、規則正しいラベリングプロセスの変形メカニズムは、材料の歪みが低レベルであることを確実にする(図29)。銅に関する1%の代表的な破断歪みの場合、FEAは、321%の伸縮性を予測するが、これは実験観察に良好に一致している(300%<ε伸縮性<350%)(シミュレーションは、銅がPI前にその破断点に到達することを示唆する。)。可逆的挙動の場合(即ち、相互接続が、解放後にその初期構成に戻る。)、最大材料歪みは降伏歪みよりも少なくなければならない。銅の代表的な降伏歪み0.3%の場合、FEAは、約168%までの印加歪みに関して可逆的であることを示唆する。この値は実験観察よりも低く、可逆性は、200%から250%の間の歪みに関しても生じる(図22)。この食い違いに関して可能性のある説明は、降伏が最初に相互接続の僅かな部分にのみ生ずることである(例えば、FEAにおける1つの素子)。この場合、可逆性に対する影響は、実験では容易に観察することができないと考えられる。
[0186]これらのレベルの伸縮性(>300%)及び可逆性(>200%)は、伸縮性バッテリ及び/又はバッテリ電極における先の報告の場合を著しく超え;従来の金属の、リソグラフィにより画定されたパターンを使用する伸縮性相互接続の、任意のその他の報告の場合よりも大きい。自己相似デザインの重要性は、他の部分が類似しているが従来の蛇行構造であるものと伸縮性を比較することにより評価することができ:FEAにより決定されたように前者は321%の伸長範囲を示しそれに対して後者は134%である(図30)。さらに、同じ全長(l全)、スパン(L)、振幅(h)、及び断面積(幅w及び厚さt)の場合であっても、自己相似デザインはやはり、伸縮性(809%対682%)及び可逆性(528%対284%)の両方で従来の蛇行を凌ぐ(図31)。本発明者らは、1軸伸長の全ての場合に、ポアソン効果が直交方向に圧縮をもたらすことに気付いた。これらの領域における座屈プロファイルは、FEAに一致した挙動を有する(図32)。
[0187]バッテリの電気化学的及び機械的挙動。優れたシステムレベルの伸縮性を、良好な面積容量密度及び適度な相互接続抵抗と共に提供する一組の寸法を選択した後、最良の電気性能を、カソード及びアノードのディスクの直径がそれぞれ2.20mm及び1.58mmであるレイアウトで観察し、そのオフセット距離は0.51mmである。この構成は、カソードに関する面積カバレッジ33%、アノードに関して17%、全バッテリに関して50%に該当する(変形していない構成で)(図33A及び33B)。相互接続は、600nmの厚さ及び50μmの幅を有する。これらのパラメータに関し、隣接するディスク間の抵抗は24Ωであり、接続リードと最も遠くにあるディスクとの間の抵抗は45Ωである。外部接続のリードは薄く且つ狭くて、界面での歪みが回避され、外部特徴付け設備に接続する可撓性(しかし伸縮性ではない。)ケーブルへの接続を容易にする。ゲル電解質は、粘性液体の流動性と固体の凝集性とを組み合わせ、それによって、イオン伝導経路を維持しながら大きい歪みを吸収することが可能になる。
[0188]300%の1軸歪みがない、及びその1軸歪みがある、バッテリ電極の電気化学特性は、図23Aに見られる。結果は、Co3+/4+及びTi4+/3+レドックス対の電位に該当する2.35V付近に、2つの十分定められた平坦部を示す。各単位でのLiCoO2(比容量145mAh/g)の厚さは約120μmであり、これは約95mgの質量に該当し、したがって充電/放電率C/2での面積容量密度は1.1mAh/cm2である。Li4Ti5O12の質量(比容量160mAh/g)は約90mgであり、これはカソードよりも5%〜10%高いアノード容量に該当する。厚さがここに記述されるものよりも大きいスラリディスクは、改善された面積容量密度をもたらすが、ディスクにおける濃度の局在化によって速度能力が低減する。バッテリの出力抵抗は約70Ωであり(図34)、漏れ電流は1〜10μAである。漏れ電流は、3つの主な原因から生ずる:(i)逆バイアスがかけられたショットキーダイオード、(ii)アノード及びカソードでのスラリディスク間の内部抵抗自己放電、及び(iii)スラリ材料中の不純物、残留酸素及び/又は水分に関連したシャトル反応を含むファラデー効果。以下及び図35に提示される実験結果は、セパレータ及び向上された包装スキームの使用により、容量損失を44時間で161μA・hから23μA・hに低減できることを示す。図23Bは、包封バッテリのクーロン効率(赤)及びサイクリング性能(黒)を示す。クーロン効率は、第1のサイクルの約60%から、3サイクル後の90%超まで上昇する。初期損失は、形成サイクルに起因すると考えられ、その最中に、固体−電解質−中間層が形成され、リチウムが、電解質中の不純物との副反応で消費される。徐々に劣化する容量保持は、むしろサイクルフェードから生じ(図36)、しかしさらに可能性があるのはカレンダフェードから生じることであり、それは包装材料中の残留水との反応、水分の浸透、及びディスクから切り離されたスラリ粒子(ホットプレスされていない)の電気的不連続のいくつかの組合せに起因するものであり、時々、電解質ゲルにおいて観察することができる。放電の深さを100%から75%に変化させることで、分解特性に著しい効果はなかった(図37)。ベーキング温度のさらなる上昇及びスラリ組成の最適化、例えば結合剤の比の上昇は、後者の挙動を低減させることができた。デバイスのアセンブリに関して改善された条件は、前者の効果を低減させる可能性がある。図23Cは、2軸伸長及び解放中の、抵抗器(2020Ω)に接続したときのバッテリの出力電力を示す。歪みによる出力電力の僅かな減少は、これらの大きいレベルでの、歪みによるスラリディスク間の著しく増大した分離から生ずる、高い内部抵抗から生じ易い。バッテリは、商用の発光ダイオード(LED)を動作させるのに十分な電力を提供し、図23Dに示されるように、電圧1.7Vでオンになる(図38)。バッテリは、LEDの顕著な減光なしに、300%まで伸張することができ(図23E)、折り畳むことができ(図23F)、捩ることができ(図23G)、ヒトの皮膚に載置されたときには順応することができる(図23H)。さらにFEAは、バッテリの完全複合構造の有効弾性率(66.8KPa)が、基板材料(Ecoflex)の弾性率(60.0KPa)よりもごく僅かしか高くないことを実証する。その結果、バッテリは、伸縮性であるだけでなく例外的に軟質であり且つ順応性あるものである。弾性率は、実際に、ヒト表皮の場合(140〜600KPa)よりも低く、それによって、著しい機械的荷重なしに、皮膚及び生体組織上に統合する潜在性が提供される。
[0189]バッテリ用の伸縮性ワイヤレス充電システム。埋め込み型デバイスなどの多くの実用的な場合には、外部電源への物理的接続を確立することなく、バッテリを充電する能力を価値あるものにすることができる。皮膚載置型デバイスなどの、充電端子がアクセス可能なシステムでは、単に、物理接触を確立するプロセスが薄い伸縮性デバイス(又は下に在る軟組織)にとって機械的に害のあるものになる可能性があるので、ワイヤレス充電には価値がある。物理接触を行う手法には、周囲の材料(例えば、皮膚そのもの)に対して電気ショックの危険性もある。材料及び設計の多様性は、バッテリそのものと一体となるワイヤレス電力伝送システムの統合を可能にする。設計及び実際のデバイスがそれぞれ図24A、24Bに見られる。2次コイルは、1次コイルからの電磁束を結合し、ショットキーダイオードは整流をもたらす。ショットキーダイオード(エポキシ内に包装され、弾性率は約4.0GPaである。)は、基板(Ecoflex製、弾性率約60KPa)の場合よりも4桁超大きい弾性率を有するが、そのサイズ(長さ0.62mm、幅0.32mm、及び高さ0.31mm)はワイヤレスシステムのサイズ全体(約30mm×約20mm)の数パーセント(約2%)しかない。その結果、全体的な伸縮性に対する影響は、図39、40A、及び40Bに示される有限要素シミュレーションによって実証されるように、依然として無視することができる。キャパシタは、出力電圧における発振を滑らかにし;その小さいサイズ及び厚さは、システム全体への自然な統合を可能にする。より大きいキャパシタは、さらにより大きい程度まで発振を滑らかにすることができる(図41)。コイル及び整流器は、直列抵抗2.3KΩを付加するが(図42)、これは2次コイルとの並列抵抗として機能するものであり、バッテリから電流を逸らす。蛇行2次コイルの抵抗は1.92kΩ/mであり;類似の全体的な幾何形状を持つが曲がりくねった形状を持たないコイルは、1.22kΩ/mになるように計算される。充電システムの効率の改善は、ワイヤの幅及び厚さを増大させることによって実現することができるが、低い伸縮性及び高い弾性率を犠牲にする。特定の適用例の要件は、正しいトレードオフを定めることになる。この場合、1次コイルからの出力電力は187mWであった。1次コイルと2次コイルとの間の1mmの作動距離により、2次コイルで受信された電力は9.2mWであり、これは4.9%の効率に相当する。ワイヤレス充電システムの電力結合効率は、蛇行受信器コイルの抵抗に強く依存する。厚さを7μmに増大させ且つ銅を使用することにより、効率が4.9%から17.2%に改善される。この厚さでは、コイルは25%の歪みまで伸縮性を保持する。データ及び画像について、以下に記述する。キャパシタは、誘電体としてポリイミドの1.2μmの厚さの層を使用し且つ底部Au電極上にチオール分子の層を設けて接着を増強させている構造内に、1.7Fのキャパシタンスを有する。図24Cは、このワイヤレス電力伝送デバイスの入力及び出力を示す。周波数44.5MHzでの入力電圧は、2次コイルの自己共鳴周波数に一致し、これはコイル面積、巻き数、ひと巻きごとの距離、及びワイヤ抵抗に依存する。ピーク間入力電圧9.1V(図24C、黒色曲線)では、DC出力電圧が3.0V(図24C、赤色曲線)である。ワイヤレスコイルを使用する小規模バッテリの充電曲線は、図24Dに見られる。バッテリ電圧(図24D、オレンジ色曲線)は、約6分で2.5Vまで上昇する。回路の充電曲線(図24D、青色曲線)は、0.5mAから0.2mA以下にまで低下する。本発明者らは、偏微分方程式を使用して充電回路をモデル化し、数値プログラムを使用して充電電流曲線を計算した。このプロセスのシミュレーションは、実験データに十分一致する(下記及び図40参照)。
[0190]考察。この実施例に記述される材料及びスキームは、伸縮性電子及び光電子デバイスに電力供給するのに魅力的な形及び性質を持つ、エネルギー貯蔵デバイス及びワイヤレス充電システムへの経路を提供する。スラリ材料そのものは、従来とは異なる材料(低弾性シリコーンゴムシート、表面レリーフがエンボス加工されている。)との自然な統合を可能にする方法(ソフトリソグラフィ型キャスティングプロセス)で展開される。伸縮性相互接続は、独自の「ばね内蔵ばね」メカニズムを提供する「自己相似」デザインを活用する。その結果、伸縮性のレベルは先の報告よりも4×超大きくなり、さらになお、同時に、50%程度に高い活物質の被覆を可能にする。これら2つの態様の組合せは、基礎をなすメカニズムの包括的且つ実験的に検証されたモデルと一緒に、以前より可能性があった何かとは非常に異なる特徴をもたらす技術、即ち伸縮性の再充電可能なバッテリをもたらす。追加の利点として、本発明者らは、バッテリの場合に類似した物理的性質を提供する、統合された伸縮性のワイヤレス充電システムを導入する。
[0191]スラリの化学的性質、セパレータの材料、及び伸縮性の空気不透過性包装材料は、高いデバイス性能が得られるように選択することができる。自己相似蛇行相互接続構造は、空間充填曲線の幾何形状、及び規則正しいラベリングの座屈の物理的性質を保持する。このタイプの相互接続構造は、硬質材料と軟質材料とを組み合わせる任意の種類の伸縮性技術に適した、即時の一般的有用性を有する。トポロジレベル相互接続幾何形状は、大きい機械的伸縮性と低い電気抵抗とを同時に提供する。ワイヤレス電力伝送効率は、コイル入力抵抗を低減させることよって、1次コイルと2次コイルとの間の相互インダクタンスを最大限にすることによって、且つコイルの自己共鳴周波数を増大させることによって、改善することができる。調整回路は、バッテリの過充電が回避されるように組み込まれてもよい。
[0192]方法。電極の製作及び自己相似相互接続の機械試験:逐次スピンキャスティングは、ポリ(メチルメタクリレート)の2重層(PMMA 495 A2、3000rpmで30秒、180℃のホットプレート上で2分間ベーク)、次いでポリイミドの層(PI、ポリ(ピロメリト酸二無水物−co−4,4’−オキシジアニリン)アミド酸溶液から;4000rpmで30秒、150℃のホットプレート上で4分間ベークし、次いで10mT及び250℃の真空炉で1時間ベーク)を、シリコンウエハ上に定めた。カソード及びアノードは、それぞれ、PI上への電子ビーム蒸着によって堆積されたAl又はCuの600nmの厚さの層からなるものであった。フォトリソグラフィ(AZ5214E)及びエッチング(タイプAアルミニウムエッチング剤、50℃のホットプレート上で2分間;Type CE−100銅エッチング剤、室温で10秒間;Transene Company)は、これらの金属のパターンを画定した。残留フォトレジストを除去した後、スピンコーティングは、PIの追加の層を全構造上に形成した。次に、フォトリソグラフィ(AZ 4620、2000rpmで30秒間、110℃で4分間ベーク)及び酸素プラズマエッチング(300mT、20sccm O2、200Wで10分間)で、PIの層を、金属トレースに一致する幾何形状にパターニングした。
[0193]高温アセトン中への浸漬は、下に在るPMMA層を部分的に除去し、それによって全構造を、シリコンウエハから1辺の水溶性テープ(3M,Inc.)の表面に取り戻すことが可能になった。シャドーマスクを通したTi(5nm)/SiO2(50nm)の電子ビーム蒸着は、金属ディスク33に位置合わせされた裏面コーティングを形成した。薄い(250μm)シリコーン基板(Ecoflex、Smooth−On)を、2成分を1:1の重量比で混合し、得られた材料をペトリ皿にスピンキャスティングし(300rpmで30秒間)、次いで部分的に硬化する(室温で30分)ことによって調製した。次に、アリルアミド官能性過フッ素化エーテル(DuPont)をスピンキャスティングし(3000rpmで30秒間)、次いでこれを紫外(UV)光の下で30分間硬化して、上部包封層を形成した。Ecoflex基板の他方の面は、UV光の下で5分間、表面活性化した。この表面への電極構造の積層は、接触によって強力な結合をもたらした。水溶性テープは、基板を水道水に一晩浸漬することによって除去した。最終ステップとして、電極を1mM HClに浸漬して、酸化物を金属表面から除去した。
[0194]自己相似相互接続の機械試験は、カスタマイズされた1軸伸張器により行った。相互接続が基板から切り離されたことを確実にするために、各ディスクを、シリコーン基板に成型されたポスト(高さ250nm)の最上部に載置した。変形した相互接続の画像及びビデオを、デジタル一眼レンズ反射カメラで収集した。
[0195]スラリのパターニング成型及びその集電電極への統合:フォトリソグラフィ(AZ 4620、7〜8μmの厚さ)及び誘導結合プラズマ反応性イオンエッチング(ICP RIE)は、シリコンウエハの表面に円柱状のウェルのアレイを画定した。条件は、引き続き記述されるように、スラリの効果的な移送に重要な傾斜した側壁が得られるように選択した。アセトンでの洗浄で、フォトレジストを除去した。ポリテトラフルオロエチレンの層(約200nm)は、ICP RIEツールを使用して共形的に堆積され、接着を防止するコーティングとして働いた。スラリ材料は、リチウムコバルト酸化物又はリチウムチタン酸化物、アセチレンブラック、及びポリフッ化ビニリデンからなるものであり、それぞれカソード及びアノード用のN−メチル−2−ピロリドン(NMP)の溶媒中、8:1:1の重量比で混合した。混合物を一晩撹拌し、次いでシリコンウエハのエッチング面全体を機械的に擦った。このようにしてスラリで充填された円柱状ウェルを、90℃のホットプレート上で一晩ベークし、次いで1片の水溶性テープ上に回収した。ベーキング条件を、スラリを高収率で回収できるように慎重に選択した。テープを金属電極に合わせることにより、成型されたスラリを金属ディスクに位置合わせすることが確実になった。水道水に一晩浸漬することにより、テープが除去された。基板を170℃で一晩真空炉内でベークすることにより、水分が除去され、スラリと金属との間の結合強度が改善された。
[0196]バッテリのアセンブリ及び電気化学試験:異方性導電性被膜を、金属電極にホットプレスし、外部電気接続用の点として働いた。基板の周辺へのSylgard Prime Coat(Dow Corning,Inc.)の付着により、結合の用意ができた。周辺の薄いシリコーンスペーサ層(500μmの厚さ)は、2枚のシートが一緒に積層されるときに直接接触するのを防止した。側方空間オフセットは、能動領域間の電気不足を防止した。縁部を、Ecoflexの追加の付着によって封止し、その後、ホットプレート上でベークした(90℃で2時間)。ゲル電解質は、100gの過塩素酸リチウム、500mlの炭酸エチレン、500mlのジメチルカーボネート、及び10gのポリエチレンオキシド(4×106g/mol)の混合物からなるものであり、均質ゲルとしてアルゴンが充填されたグローブボックス内で調製した。この材料を、縁部を通して、注射器を使用してバッテリ内に注入した。
[0197]室温でカットオフ電圧が2.5〜1.6VのBioLogic VMP3電気化学ステーションを使用して、製作されたままのバッテリ電極及び伸張されたバッテリ電極を充放電し、完全統合バッテリのサイクリング挙動を評価した。面積容量密度を、能動領域に基づいて計算した。出力電力を、電流計を使用して、2020Ω抵抗器に接続されたバッテリと共にモニタした。電流の値を、バッテリに印加された歪みの関数として記録した。
[0198]ワイヤレスコイルの製作及び試験:前述のステップを使用して、PMMA及びPIの層でコーティングされたシリコンウエハは、電子ビーム蒸着によってCr(5nm)/Au(500nm)を堆積するための基板として働いた。フォトリソグラフィ(AZ 5214E)及びエッチング(Transene Company)は、キャパシタの底部電極及び関連ある接触ラインの幾何形状のパターンを画定した。アセトンでフォトレジストを除去し、次いで基板を、イソプロパノールに溶かした1mMのポリ(エチレングリコール)メチルエーテルチオール溶液に15分間浸漬することにより、PIスピンキャスト(4000rpm、30秒)の第2の層の接着及び被覆が増強されるように働き、電極上で硬化した(150℃のホットプレート上で4分間、次いで250℃の真空炉内で1時間)。PIのこの層は、キャパシタの誘電体として働いた。フォトリソグラフィ(AZ 4620、2000rpmで30秒間、110℃で4分間ベーク)は、キャパシタのコイルと底部電極との間の接続点として、PI層を通してバイアをエッチングするためのマスクを画定した。アセトンに浸漬したフォトレジストを除去した後、スパッタ堆積は、側壁を含む全面上にCu(600nm)の共形層を形成した。フォトリソグラフィ(AZ 5214E)及びエッチングは、キャパシタのコイル及びその他の上部電極を画定した。レジストを除去した後、PIの第3のスピンキャスト層は、Cu電極上のコーティングを形成した。パターニングされた幾何形状にある3つのPI層を通した酸素プラズマエッチングは、最終的なデバイスのレイアウトを画定した。高温アセトンに浸漬することによる解放は、下に在るPMMAを部分的に除去して、水溶性テープ上への全体構造の解放を可能にした。Ti(5nm)/SiO2(50nm)の堆積、及びエコフレックス基板のUV活性化表面への積層は、強力な結合をもたらした。水溶性テープを除去した後、ショットキーダイオードチップ(Digikey BAT 62−02LS E6327)を、銀エポキシを使用してコイルとキャパシタとの間に結合した。順方向入力抵抗は約500Ωであり、整流比は、±1Vのバイアス電圧で約1×104である。
[0199]高周波数交流電流信号は、KEITHLEY 3390 50MHzの任意の波形発生器により発生させた。ワイヤレスコイルの入力及び出力の特徴付けは、Agilent infiniium DSO8104Aオシロスコープ(1GHz、4チャンネル)を使用して行った。バッテリへのワイヤレス充電電圧及び電流を、BioLogic VMP3電気化学ステーションを使用してモニタした。
[0200]補遺情報。シリコーン基板上のAl/PIの座屈シートからなる、伸縮性包封層の製作。第1のステップでは、Alバッテリ電極に用いられたものに類似した手順を使用して、シリコン基板上にPMMA/PI/Alの3層を製作した。AZ5214Eによるフォトリソグラフィ、及びAlの湿式エッチングは、PI/Alシートの側方寸法を画定した。次に、酸素プラズマエッチング(300mT、20sccm O2、200Wで5分間)は、露光領域のPI層を除去した。高温アセトンへの浸漬は、下に在るPMMA層を部分的に除去し、それによって、全構造をシリコンウエハから1片の水溶性テープ(3M,Inc.)に回収することが可能になった。Ti(5nm)/SiO2(50nm)の電子ビーム蒸着は、裏面コーティングを形成した。別の基板上に、500μmの厚さのシリコーンシート(Ecoflex、Smooth−On)を調製し、次いで除去し、約30%のレベルまで2軸方向を予歪状態にし、次いでスライドガラス上に積層することによって固定した。シリコーン表面は、UV誘導型オゾンに5分間曝すことによって活性化した。この表面上にPI/Alの2重層を積層することで、接触により強力な結合が得られた。水溶性テープは、基板を水道水に一晩浸漬することによって除去した。スライドガラスから全アセンブリを剥がし取ることにより、予歪状態が解放され、予測された座屈パターンが得られた。この構成では、システム全体を、予歪状態に等しい大きさの歪みまで伸長することができる。
[0201]「島−橋」自己相似電極構造の機械解析:FEA。完全3次元(3D)FEAを、伸長及び圧縮下で「島−橋」自己相似電極構造の座屈後の挙動を解析するのに採用した。電極の構造の周期性により、代表的な単位セルを調査したが、その詳細な幾何形状を図25に示す。電極の円形の島を、シリコーン基板(エコフレックス;厚さ500μm)の表面に成型されたポスト(高さ250μm)に載置する。金属相互接続(厚さ0.6μm)を、その上部及び底部をポリイミドの薄層(PI、厚さ1.2μm、各層ごとに)により包封する。弾性率(E)及びポアソン比(v)は、エコフレックスに関してEエコフレックス=0.06MPa及びvエコフレックス=0.49であり;銅に関してECu=119GPa及びvCu=0.34であり;アルミニウムに関してEAl=70GPa及びvAl=0.35であり;PIに関してEPI=2.5GPa及びvPI=0.34である。8ノード3D(3次元)素子及び4ノードシェル素子を、エコフレックス及び自己相似電極にそれぞれ使用し、精製されたメッシュを採用して精度を確実なものにした。印加された歪みによる変形構成の発生は、図22及び図32にそれぞれ示されるように、伸長及び圧縮の両方に関してFEAから得られる。FEA及び実験結果の間の良好な一致を見出すことができる。ここで本発明者らは、座屈プロファイルの実証として銅の場合を取り上げる。アルミニウム層に関する結果は類似している。自己相似相互接続と曲がりくねった相互接続(図31)との間での、伸縮性及び可逆性の比較では、重要な幾何学パラメータは同じに保たれ、全長(l全=16.77mm)、スパン(L=1.6mm)、振幅(h=0.4mm)、幅(w=30μm)、及び厚さ(t=3.0μm)が含まれる。アルミニウム相互接続(厚さ0.6μm)は、ポリイミドの2つの薄層(各層ごとに、厚さ1.2μm)によって包封される。図31は、0%〜約800%の伸長の全範囲にわたり、自己相似相互接続の歪みレベルが、曲がりくねったものよりも常に低いことを実証する。自己相似デザインの伸縮性(809%)及び可逆性(528%)は、単純な曲がりくねったデザインの場合(ε伸縮性=682%、ε可逆性=284%)よりも高い。
[0202]バッテリの漏れ電流の解析。漏れ電流は、3つのソースから生ずる。第1のソースは、可逆バイアスショットキーダイオードを経た電流である。この電流は約0.2μAであり、バッテリの寿命全体を通して比較的一定である。より小さい可逆電流を持つショットキーダイオードが利用可能であり;そのようなデバイスは、漏れに対するこの寄与を低減させることができる。
[0203]第2のソースは、アノード及びカソードのスラリディスク間の、内部オーミック自己放電電流である。この寄与は、電解質の有限素子導電率と、カソード及びアノードのスラリディスク間の任意の寄生物理接触から生ずる。これらの損失は、高純度の電解質材料によって、且つセパレータを実装することによって、劇的に低減させることができる。新しい実験は、後者の効果を定量的に明らかにする。図35は、商用セパレータ(Celgard)を備えた、及び備えていない、その他の点では類似しているバッテリの、電圧減衰及び漏れ電流曲線を示す。この構成要素は、容量損失を44時間で161μA・hから88μA・hに低減させる。
[0204]第3のソースは、スラリ材料中の不純物、残留酸素、及び/又は水分に関連したシャトル反応を含む、ファラデー効果により生成された電流からである。包装材料の空気不透過性の改善は、そのような反応から生じる電流を低減させることができる。新しい実験は、Alパウチ(伸長が可能になるように、皺が寄った構成として構成することができる。)内へのバッテリの封止が、容量損失を161μA・hから62μA・hに低減させることを示す。セパレータとAlパウチ包装との組合せは、容量損失を23μA・hに抑制する。図35は、これらの知見の全てをまとめる。
[0205]個別のショットキーダイオードの伸長挙動解析。実用的な見地から、本発明者らは、ダイオードの比較的小さいサイズに起因して、統合システムの機械的性質全体に対する有意な拘束を観察していない。特に、約4.0GPaの弾性率を有するエポキシに包封されたショットキーダイオードは、基板(Ecoflex製、弾性率は約60KPa)の場合よりも有効に4桁超大きいが、その寸法(長さ0.62mm、幅0.32mm、及び高さ0.31mm)は、ワイヤレスシステムのサイズ全体(約30mm×約20mm)の数パーセント(約2%)でしかないことを表す。実験により、本発明者らは、約30%まで及びそれを超えて伸長するのにシステムが堅牢であることを観察している。
[0206]これらの効果を定量的に調査するために、本発明者らは、図39(上部パネル)のように、統合システムにおけるコイルの伸縮性に対するダイオードの影響を検査する、完全3次元有限素子シミュレーションを実施する。図39の下部パネルの結果は:(1)ダイオードが含まれる場合、伸縮性の低下が32.6%〜32.3%の中程度であり、(2)システム全体が32.3%伸長された場合であっても、ダイオードの歪み(即ち、エポキシ)が非常に小さい(<0.15%、破断を引き起こすのに必要な歪みよりもさらに小さい。)ことを示す。
[0207]直交する界面歪みも重要である。図24Aは、30%の伸長に関する、その中心にダイオードが載置されている広いEcoflex基板の最大主歪みの分布を示す。図40Bは、ダイオード/基板の界面にある、基板の直交歪みの分布を示す。この場合の直交界面歪みは負であり、界面の圧縮歪みに該当する。界面亀裂でのエネルギー放出率に基づく理論的予測に一致したこの結果は、層間剥離の傾向を最小限に抑える。
[0208]ワイヤレス電力伝送効率に対するコイル抵抗の効果。コイルの抵抗/Q値は、効率を支配する極めて重要なパラメータである。この効果を例示する追加の実験では、本発明者らは、600nmの厚さの金蛇行コイルを、厚さが増大した銅で製作された、その他の点では類似しているものと置き換えた。結果は、7μmの厚さの銅被膜(Dupont)を使用して形成されたコイルが、全抵抗185Ωを有し、受信電力30.8mWを発生させ、入力電力が179mW(1mmの距離で、先に報告された結果に類似)であることを示す。対応する効率は17.2%であり、これは当初の金コイル(4.9%)よりも3倍以上も改善されたことを表す。18μmの厚さの銅箔(MTI Corp.)を使用することによる、38Ωまでのコイル抵抗のさらなる低減は、受信電力を36.2mWまで改善し、効率を20.2%まで改善する。図43Aを参照されたい。
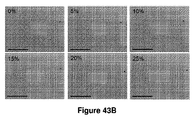
[0209]厚さのこれらの増加、したがって電力伝送効率は、伸長に関連した本質的なメカニズムに変化をもたらす。特に、厚さが増大するにつれ、伸縮性は減少する。厚さが7μmのコイルは、効率と機械的変形性との間に良好なバランスを提供し、歪みに順応する能力は約25%である。様々なレベルの歪みの画像が図43Bに見られ、最大1軸歪み及びコイル蛇行の幾何形状の両方に関しては有限要素解析結果に十分一致している(図43C)。
ワイヤレス電力伝送回路における充電電流のモデリング
[0210]充電回路は、下記のモデルを使用して記述することができる:
式中、U
0は、3ボルトの電圧の充電源である。L及びRは、回路に関連するインダクタンス及び抵抗である。U(t)は、電圧計の時間依存性読出しであり、I(t)は、電流計の時間依存性読出しである。
[0211]プログラムは、偏微分方程式(1)に基づいてI−V曲線をシミュレートするように開発された。U(t)に基づいてシミュレートされた時間依存性電流Is(t)を、測定されたI(t)と比較し、その結果を図44A及び44Bに示す。
[0212]電流をシミュレートするのに使用したプログラム:
#include<iostream.h>
#include<stdio.h>
#include<stdlib.h>
#include<math.h>
#include<time.h>
#define tim 3500
#define start 265
float curre[tim];
float nihe[tim];
float test[tim];
float voll[tim];
FILE *fp;
int main()
{
inti,j,k;
fp=fopen("Cur.txt","r");
for(i=0;i<tim;i++)
{
fscanf(fp,"%f",&curre[i]);
curre[i]=-curre[i];
cout<<curre[i]<<endl;
}
fclose(fp);
fp=fopen("Vol.txt","r");
for(i=0;i<tim;i++)
{
fscanf(fp,"%f",&voll[i]);
cout<<voll[i]<<endl;
}
fclose(fp);
double coef1;
double coef2;
coef2=curre[1]/(voll[1]-voll[0]);
cout<<coef2<<endl;
test[0]=curre[0];
test[start]=curre[start];
double coef1th;
double maxh=1000000000;
double coef2th;
for(coef2=0;coef2<0.04; coef2=coef2+0.0001)
{
cout<<coef2<<endl;
for(coef1=0.94; coef1<=0.96; coef1=coef1+0.0001)
{
// cout<<coef1<<endl;
for(i=start+1;i<tim;i++)
{
test[i]=coef1*test[i-1]+(3-(voll[i]+voll[i-1])*0.5)*coef2;
}
double poi=0;
for(i=start;i<tim;i++)
{
poi+=(test[i]-curre[i])*(test[i]-curre[i]);
}
if(poi<maxh)
{
coef1th=coef1;
coef2th=coef2;
maxh=poi;
for(int j=0;j<tim;j++)
{
nihe[j]=test[j];
}
}
}
}
cout<<coef1th<<endl;
cout<<coef2th<<endl;
cout<<maxh<<endl;
fp=fopen("nihe.txt","w");
for(i=0;i<tim;i++)
{
fprintf(fp, "%f", -nihe[i]);
fprintf(fp, "\n");
}
fclose(fp);
fp=fopen("canshu.txt","w");
fprintf(fp,"%f", coef1th);
fprintf(fp,"\n");
fprintf(fp,"%f", coef2th);
fprintf(fp,"\n");
fclose(fp);
return(1);
}
参考文献
[0213] Rogers, J. A., Someya, T.& Huang, Y. G. Materials and Mechanics for Stretchable Electronics. Science327, 1603-1607, doi:10.1126/science.1182383 (2010).
[0214] Wagner, S. & Bauer, S.Materials for stretchable electronics. MRS Bull. 37, 207-217,doi:10.1557/mrs.2012.37 (2012).
[0215] Kim, D. H., Ghaffari, R., Lu,N. S. & Rogers, J. A. in Annual Review of Biomedical Engineering, Vol 14Vol. 14 Annual Review of Biomedical Engineering (ed M. L. Yarmush) 113-128 (Annual Reviews, 2012).
[0216] Tian, B. Z. et al.Macroporous nanowire nanoelectronic scaffolds for synthetic tissues. Nat. Mater. 11, 986-994,doi:10.1038/nmat3404 (2012).
[0217] Takei, K. et al. Nanowire active-matrix circuitry for low-voltage macroscaleartificial skin. Nat. Mater. 9, 821-826, doi:10.1038/nmat2835(2010).
[0218] Ramuz, M., Tee, B. C. K.,Tok, J. B. H. & Bao, Z. Transparent, Optical, Pressure-Sensitive ArtificialSkin for Large-Area Stretchable Electronics. Advanced Materials 24,3223-3227, doi:10.1002/adma.201200523 (2012).
[0219] Sekitani, T. et al. Arubberlike stretchable active matrix using elastic conductors. Science 321,1468-1472, doi:10.1126/science.1160309 (2008).
[0220] Ahn, B. Y. et al.Omnidirectional Printing of Flexible, Stretchable, and Spanning SilverMicroelectrodes. Science 323, 1590-1593, doi:10.1126/science.1168375(2009).
[0221] Wu, H. et al. Atransparent electrode based on a metal nanotrough network. Nat. Nanotechnol.8, 421-425, doi:10.1038/nnano.2013.84 (2013).
[0222] Sekitani, T. et al.Stretchable active-matrix organic light-emitting diode display using printableelastic conductors. Nat. Mater. 8, 494-499, doi:10.1038/nmat2459(2009).
[0223] Robinson, A. P., Minev, I.,Graz, I. M. & Lacour, S. P. Microstructured Silicone Substrate forPrintable and Stretchable Metallic Films. Langmuir 27, 4279-4284,doi:10.1021/la103213n (2011).
[0224] Gray, D. S., Tien, J. &Chen, C. S. High-Conductivity Elastomeric Electronics. Advanced Materials16, 393-397, doi:10.1002/adma.200306107 (2004).
[0225] Brosteaux, D., Axisa, F.,Gonzalez, M. & Vanfleteren, J. Design and fabrication of elasticinterconnections for stretchable electronic circuits. IEEE Electron DeviceLett. 28, 552-554, doi:10.1109/led.2007.897887 (2007).
[0226] Vanfleteren, J. et al.Printed circuit board technology inspired stretchable circuits. MRS Bull.37, 254-260, doi:10.1557/mrs.2012.48 (2012).
[0227] Kim, D. H., Xiao, J. L.,Song, J. Z., Huang, Y. G. & Rogers, J. A. Stretchable, CurvilinearElectronics Based on Inorganic Materials. Advanced Materials 22,2108-2124, doi:10.1002/adma.200902927 (2010).
[0228] Chen, Z. & Mecholsky, J.J. CONTROL OF STRENGTH AND TOUGHNESS OF CERAMIC-METAL LAMINATES USING INTERFACEDESIGN. Journal of Materials Research 8, 2362-2369, doi:10.1557/jmr.1993.2362(1993).
[0229] Connor, M. T., Roy, S.,Ezquerra, T. A. & Calleja, F. J. B. Broadband ac conductivity ofconductor-polymer composites. Physical Review B 57, 2286-2294,doi:10.1103/PhysRevB.57.2286 (1998).
[0230] Hajji, P., David, L., Gerard,J. F., Pascault, J. P. & Vigier, G. Synthesis, structure, and morphology ofpolymer-silica hybrid nanocomposites based on hydroxyethyl methacrylate. Journalof Polymer Science Part B-Polymer Physics 37, 3172-3187,doi:10.1002/(sici)1099-0488(19991115)37:22<3172::aid-polb2>3.0.co;2-r(1999).
[0231] Kim, Y. et al.Stretchable nanoparticle conductors with self-organized conductive pathways. Nature500, 59-U77, doi:10.1038/nature12401 (2013).
[0232] Zhang, M. Q., Lu, Z. P. &Friedrich, K. On the wear debris of polyetheretherketone: Fractal dimensions inrelation to wear mechanisms. Tribology International 30, 87-102,doi:10.1016/0301-679x(96)00027-8 (1997).
[0233] Goldberger, A. L. & West,B. J. FRACTALS IN PHYSIOLOGY AND MEDICINE. Yale Journal of Biology andMedicine 60, 421-& (1987).
[0234] Masters, B. R. Fractalanalysis of the vascular tree in the human retina. Annual Review ofBiomedical Engineering 6, 427-452, doi:10.1146/annurev.bioeng.6.040803.140100(2004).
[0235] Kim, D. H. et al.Epidermal Electronics. Science 333, 838-843,doi:10.1126/science.1206157 (2011).
[0236] Sagan, H. Space-fillingcurves. (Springer-Verlag, 1994).
[0237] Chasiotis, I. et al. Strain rate effects on the mechanical behavior of nanocrystalline Aufilms. Thin Solid Films 515, 3183-3189,doi:10.1016/j.tsf.2006.01.033 (2007).
[0238] Lu, N. S., Wang, X., Suo, Z.G. & Vlassak, J. Metal films on polymer substrates stretched beyond 50%. AppliedPhysics Letters 91, 3, doi:10.1063/1.2817234 (2007).
[0239] Espinosa, H. D., Prorok, B.C. & Peng, B. Plasticity size effects in free-standing submicronpolycrystalline FCC films subjected to pure tension. Journal of theMechanics and Physics of Solids 52, 667-689,doi:10.1016/j.jmps.2003.07.001 (2004).
[0240] Chasiotis, I. & Knauss,W. G. A new microtensile tester for the study of MEMS materials with the aid ofatomic force microscopy. Experimental Mechanics 42, 51-57, doi:10.1177/0018512002042001789(2002).
[0241] Jiang, H. et al.Finite deformation mechanics in buckled thin films on compliant supports. Proceedingsof the National Academy of Sciences of the United States of America 104,15607-15612, doi:10.1073/pnas.0702927104 (2007).
[0242] Song, J. et al.Buckling of a stiff thin film on a compliant substrate in large deformation. InternationalJournal of Solids and Structures 45, 3107-3121,doi:10.1016/j.ijsolstr.2008.01.023 (2008).
[0243] Sato, K., Yoshioka, T., Ando,T., Shikida, M. & Kawabata, T. Tensile testing of silicon film havingdifferent crystallographic orientations carried out on a silicon chip. Sensorsand Actuators a-Physical 70, 148-152,doi:10.1016/s0924-4247(98)00125-3 (1998).
[0244] Jeong, J.-W. et al.Materials and Optimized Designs for Human-Machine Interfaces Via EpidermalElectronics. Advanced Materials, doi:10.1002/adma.201301921 (2013).
[0245] Yeo, W. H. et al.Multifunctional Epidermal Electronics Printed Directly Onto the Skin. AdvancedMaterials 25, 2773-2778, doi:10.1002/adma.201204426 (2013).
[0246] Fairbanks, M. S., McCarthy,D. N., Scott, S. A., Brown, S. A. & Taylor, R. P. Fractal electronicdevices: simulation and implementation. Nanotechnology 22,doi:10.1088/0957-4484/22/36/365304 (2011).
[0247] Golestanirad, L. et al.Analysis of fractal electrodes for efficient neural stimulation. Frontiersin neuroengineering 6, 3, doi:10.3389/fneng.2013.00003 (2013).
[0248] Taylor, R. Vision of beauty. PhysicsWorld 24, 22-27 (2011).
[0249] Webb, R. C. et al.Ultrathin conformal devices for precise and continuous thermal characterizationof human skin. Nat Mater 12,938-944, doi:10.1038/nmat3755
[0250] http://www.nature.com/nmat/journal/v12/n10/abs/nmat3755.html#supplementary-information(2013).
[0251] Cohen, N. Fractal Antennas:Part 1. Communications Quarterly, 7-22 (1995).
[0252] Gianvittorio, J. P. &Rahmat-Samii, Y. Fractal antennas: A novel antenna miniaturization technique,and applications. Ieee Antennas and Propagation Magazine 44,20-36, doi:10.1109/74.997888 (2002).
[0253] Puente, C., Romeu, J., Pous,R., Ramis, J. & Hijazo, A. Small but long Koch fractal monopole. ElectronicsLetters 34, 9-10, doi:10.1049/el:19980114 (1998).
[0254] Pelrine, R., Kornbluh, R.,Pei, Q. B. & Joseph, J. High-speed electrically actuated elastomers withstrain greater than 100%. Science 287, 836-839 (2000).
[0255] Wagner, S. et al. Electronicskin: architecture and components. Physica E Low Dimens Syst Nanostruct 25,326-334 (2004).
[0256] Khang, D. Y., Jiang, H. Q.,Huang, Y. & Rogers, J. A. A stretchable form of single-crystal silicon forhigh-performance electronics on rubber substrates. Science 311, 208-212 (2006).
[0257] Sekitani, T. et al. Arubberlike stretchable active matrix using elastic conductors. Science 321,1468-1472 (2008).
[0258] Sekitani, T. & Someya, T.Stretchable organic integrated circuits for large-area electronic skinsurfaces. MRS Bulletin 37, 236-245 (2012).
[0259] Suo, Z. G. Mechanics ofstretchable electronics and soft machines. MRS Bulletin 37, 218-225 (2012).
[0260] Yoon, J. et al. Ultrathinsilicon solar microcells for semitransparent, mechanically flexible andmicroconcentrator module designs. Nature Mater. 7, 907-915 (2008).
[0261] Kim, D. H. et al. EpidermalElectronics. Science 333, 838-843 (2011).
[0262] Mannsfeld, S. C. B. et al.Highly sensitive flexible pressure sensors with microstructured rubberdielectric layers. Nature Mater. 9, 859-864 (2010).
[0263] Takei, K. et al. Nanowireactive-matrix circuitry for low-voltage macroscale artificial skin. NatureMater. 9, 821-826 (2010).
[0264] Someya, T. et al. Alarge-area, flexible pressure sensor matrix with organic field-effecttransistors for artificial skin applications. Proc. Natl. Acad. Sci. U. S. A.101, 9966-9970 (2004).
[0265] Kim, D. H. et al. Materialsfor multifunctional balloon catheters with capabilities in cardiacelectrophysiological mapping and ablation therapy. NatureMater. 10, 316-323 (2011).
[0266] Ko, H. C. et al. A hemispherical electronic eye camera based on compressible siliconoptoelectronics. Nature 454, 748-753 (2008).
[0267] Nishide, H. & Oyaizu, K.Toward flexible batteries. Science 319, 737-738 (2008).
[0268] Pushparaj, V. L. et al.Flexible energy storage devices based on nanocomposite paper. Proc. Natl. Acad.Sci. U. S. A. 104, 13574-13577 (2007).
[0269] Scrosati, B. Nanomaterials -Paper powers battery breakthrough. Nature Nanotechnol. 2, 598-599 (2007).
[0270] Hu, L. B. et al. Highlyconductive paper for energy-storage devices. Proc. Natl. Acad. Sci. U. S. A.106, 21490-21494 (2009).
[0271] Hu, L., Wu, H., La Mantia,F., Yang, Y. & Cui, Y. Thin, Flexible Secondary Li-Ion Paper Batteries. ACSNano 4, 5843-5848 (2010).
[0272] Yu, C. J., Masarapu, C.,Rong, J. P., Wei, B. Q. & Jiang, H. Q. Stretchable Supercapacitors Based onBuckled Single-Walled Carbon Nanotube Macrofilms. Adv. Mater. 21, 4793-4797(2009).
[0273] Hu, L. B. et al. Stretchable,Porous, and Conductive Energy Textiles. Nano Lett. 10, 708-714 (2010).
[0274] Kaltenbrunner, M.,Kettlgruber, G., Siket, C., Schwodiauer, R. & Bauer, S. Arrays ofUltracompliant Electrochemical Dry Gel Cells for Stretchable Electronics. Adv.Mater. 22, 2065-2067 (2010).
[0275] Gaikwad, A. M. et al. HighlyStretchable Alkaline Batteries Based on an Embedded Conductive Fabric. Adv.Mater. 24, 5071-5076 (2012).
[0276] Tarascon, J. M. & Armand,M. Issues and challenges facing rechargeable lithium batteries. Nature 414,359-367 (2001).
[0277] Scrosati, B. & Garche, J.Lithium batteries: Status, prospects and future. J. Power Sources 195,2419-2430 (2010).
[0278] Thanawala, S. K. &Chaudhury, M. K. Surface modification of silicone elastomer usingperfluorinated ether. Langmuir 16, 1256-1260 (2000).
[0279] Lee, J. et al. StretchableGaAs Photovoltaics with Designs That Enable High Areal Coverage. Adv. Mater.23, 986-991 (2011).
[0280] Lee, J. et al. StretchableSemiconductor Technologies with High Areal Coverages and Strain-LimitingBehavior: Demonstration in High-Efficiency Dual-Junction GaInP/GaAsPhotovoltaics. Small 8, 1851-1856 (2012).
[0281] Krieger, K. Extrememechanics: Buckling down. Nature 488, 146-147 (2012).
[0282] Yoshima, K., Munakata, H.& Kanamura, K. Fabrication of micro lithium-ion battery with 3D anode and3D cathode by using polymer wall. J. Power Sources 208, 404-408 (2012).
[0283] Ferg, E., Gummow, R. J.,Dekock, A. & Thackeray, M. M. Spinel Anodes for Lithium-Ion Batteries. J.Electrochem. Soc. 141, L147-L150 (1994).
[0284] Owen, J. R. Rechargeablelithium batteries. Chem. Soc. Rev. 26, 259-267 (1997).
[0285] Gowda, S. R. et al. ConformalCoating of Thin Polymer Electrolyte Layer on Nanostructured Electrode Materialsfor Three-Dimensional Battery Applications. Nano Lett. 11, 101-106 (2011).
[0286] Sun, Y. G., Choi, W. M.,Jiang, H. Q., Huang, Y. G. Y. & Rogers, J. A. Controlled buckling ofsemiconductor nanoribbons for stretchable electronics. Nature Nanotechnol. 1,201-207 (2006).
[0287] Ouyang, M., Yuan, C.,Muisener, R. J., Boulares, A. & Koberstein, J. T. Conversion of somesiloxane polymers to silicon oxide by UV/ozone photochemical processes. Chem.Mater. 12, 1591-1596 (2000).
[0288] Datasheet for BAT 62-02LSE6327 on www.digikey.com.
実施例3:超伸縮性自己相似蛇行相互接続のメカニズム
要約
[0289]自己相似蛇行レイアウトを採用する電気相互接続は、いわゆる島−橋デザインを持つ小さい非伸縮性能動デバイスの収集物からなるシステムに、並外れたレベルの伸縮性を提供する。この実施例は、そのような構造に関する可撓性及び弾性の伸縮性の解析モデルを開発し、種々の次数の自己相似性で、再帰式を確立する。解析的解法は有限要素解析(FEA)に十分一致し、共に自己相似構造の次数が1つ増加した場合に弾性伸縮性が2倍超になることを実証する。デザインの最適化は、それぞれ表面充填比が能動デバイスの50%及び70%であるシステムに関して、90%及び50%の弾性伸縮性をもたらす。
1.序論
[0290]大きな歪み(>>1%)変形に対して弾性応答をもたらす電子及び光電子システムの開発における関心は、近年急速に増大しつつあるが[1〜10]、それは1つには、着用可能な光起電力[11]装置、「表皮」健康/ウェルネスモニタ[8]、眼球様デジタルカメラ[9、12]、及び感受性あるロボットの皮膚[13〜15]など、確立された技術では対処することができない、ある範囲の重要な適用例の可能性に起因する。これらの伸縮性デバイスの多くは、島−橋デザイン[8、12、16〜18]を採用し、能動構成要素が小さな局在化領域(即ち、島)に分布されており且つ狭い変形可能な電気及び/又は機械相互接続(即ち、橋)により接合されている。伸張条件下、比較的剛性の島は、破断を引き起こす可能性のある(例えば、<1%)歪みから能動構成要素(通常は脆性材料)を効果的に切り離し;橋構造が、変形のほぼ全てを吸収する[17〜19]。多くの実用デバイスでは、島−橋デザインは、2つの競合する目標、即ち、能動デバイスの高い表面充填比及び全システムの高い伸縮性を同時に達成しなければならない。実証された設計解には、曲がりくねった[1、8、17、20〜27]又は非同一平面[12、18]相互接続が含まれる。しかしこれらの技術は、面積カバレッジを著しく犠牲にしないシステムでは、典型的には50%未満の全伸縮性レベルを与える。最近、Xuら[19]は、空間充填曲線のタイプである、自己相似蛇行幾何形状(図45aに示す。)を活用する代替タイプの相互接続デザインを示した。この概念は、約300%までの2軸伸縮性を有し且つ約50%程度に高い活物質の面積カバレッジを有するリチウムイオンバッテリを可能にする。包括的な実験及び数値調査は、そのような自己相似蛇行相互接続が、隣接する島同士の所与の間隔に関し、従来の蛇行構造に比べて改善されたレベルの伸縮性を保有することを示した。これらの構造における空間充填幾何形状の性質及びそれらの規則正しいラベリングのメカニズムは、重要な役割を演ずることがわかった。
[0291]この実施例は、自己相似蛇行相互接続の可撓性及び弾性の伸縮性(以後、簡単に伸縮性と呼ぶ。)を調査し且つ伸張限界を最適化するための設計指針を確立する、解析モデルを開発することを目標とする。ここで本発明者らは、変形を自由に引き起こすことができるように且つ基板との相互作用を無視することができるように、相互接続が支持基板に結合されていないシナリオに焦点を当てる。そのような自由に懸下された相互接続は、2つの方法のいずれかにより製作することができる:i)表面レリーフ構造をエラストマー基板上に成型し[16、18、28]、隆起したレリーフの上部に島を結合する;ii)基板への島の選択的結合が可能になるように、SiO2堆積のマスクを設計し[29、30]、それと共に、基板との最小限の相互作用を相互接続に残す。本発明の研究は、ワイヤレス誘導コイル[19]及び光起電力モジュール[11]など、低電気抵抗を要する適用例で必要とされるように、主に、幅と同等の厚さに対する比較的厚い相互接続に焦点を当てる。そのような場合、相互接続の変形は、システムが伸張下にある場合には座屈でなく平面内屈曲により支配される。ここで臨界的な座屈歪みは、許容可能な変形範囲内で座屈が誘発されないように、伸縮性に比べて大きい[31]。このメカニズムは、既に調査された自立して薄い曲がりくねった相互接続のタイプ[17、31〜33]とは定性的に異なる。自立した厚い自己相似相互接続の場合、可撓性及び伸縮性の解析モデルはこの研究で確立される。次いでモデルを、任意の自己相似の次数にまで拡張する。結果は、実際の適用例に関する設計指針を確立する。
[0292]この実施例は、下記の通り概説される:セクション2は、可撓性及び伸縮性を解析するための機械的モデルを例示するために、最も単純な幾何学的構成、自己相似長方形相互接続に焦点を当てる。解析モデルは、セクション3で自己相似長方形及び蛇行相互接続を一般化するよう拡張される。自己相似相互接続の伸縮性は、セクション4で調査される。セクション5は、高いシステム伸縮性を実現する際のその利点を例示するために、伸縮性エレクトロニクスに関する、自己相似蛇行相互接続の最適なデザインを提示する。
2.自己相似長方形相互接続
[0293]このセクションは、その構造、可撓性、及び伸縮性を例示するために、長方形の構成における(図45bに示されるように)幾何学的に単純な自己相似相互接続に焦点を当てる。長方形相互接続は、従来の蛇行相互接続(図45cの上部パネル)の変形例であり、その単純な幾何形状により自己相似構造を構成するのに都合が良い。自己相似長方形相互接続の可撓性を決定するために、重要なことは、隣接する次数の可撓性の間に関係を、即ち再帰式を確立することである。本発明者らは、まず、セクション2.2におけるモデルを示す例として、1次自己相似長方形相互接続を得、次いで理論的フレームワークを、セクション2.3及び2.4でそれぞれ2次及び任意の次数に一般化する。
2.1.幾何形状
[0294]このサブセクションは、自己相似長方形接続の幾何学的構成を紹介する。1次(オリジナル)長方形相互接続は、図45bの黒色ボックスに示されるように、互いに直交し且つ直列に接続される2組の直線ワイヤからなる。図45bの青色ボックスに示される2次長方形相互接続は、1次相互接続の規模を低減し、構造を90°回転し、次いでその多数のコピーを、オリジナルの幾何形状のレイアウトが再現されるように接続することによって、生成される。図45bの広い青色ラインは、1次長方形幾何形状に類似した2次幾何形状を表す。同じアルゴリズムを実施することにより、本発明者らは、図45bの赤色及び紫色ボックスに示されるような3次及び4次長方形相互接続を発生させることができ、これらの赤色及び紫色のラインは、それぞれ3次及び4次幾何形状を示す。
[0295]自己相似長方形相互接続の場合、mは単位セルの数を示し、ηは互いの高さ/間隔のアスペクト比を示す。したがって、i番目(i=1...n)の水平線及び垂直線の長さ、l
(i)及びh
(i)(図45b)は、
h
(i)=ηl
(i) (1)
によって関係付けられる。さらに、i次幾何形状の高さは、(i−1)次幾何形状の2つの端部の間の距離に等しく、即ち
h
(i)=2ml
(i−1) (i=2...n) (2)
である。方程式(1)及び(2)は、
l
(i)=(η/2m)
n−il
(n)、h
(i)=η(η/2m)
n−il
(n) (i=1...n) (3)
として、l
(n)、η、及びmに関して任意の次数で長さ及び高さを与える。これは、任意の自己相似長方形相互接続の幾何形状が、1つの基線長(l
(n))と、3つの無次元パラメータ、即ち単位セルの自己相似次数(n)、高さ/間隔比(η)、及び数(m)によって特徴付けられることを示す。n≧3の場合、図45b及び47b(後で論じる。)に示される3次長方形相互接続の幾何形状から観察することができる下記の関係式、
l
(i)=(2m
h+1)l
(i−2) (i=3...n) (4)
(式中、m
hは、i次幾何形状(i=3...n)の水平部分によって表される構造内の完全単位セルの数である。)
により、高さ/間隔比ηに対して追加の制限事項があることに言及すべきである。方程式(3)及び(4)は、n≧3の場合、高さ/間隔比ηに制限事項を与え、
即ち高さ/間隔比は、n≧3の場合にいくつかの個別の値を得ることができるだけである。図45bは、一組の自己相似長方形相互接続を示し、n=1〜4であり、m=4及び
である。
2.2.1次長方形相互接続の可撓性
[0296]図46aは、m個の単位セルを有し高さ/間隔比がηである、1次自己相似長方形相互接続の概略図を示す。図46bに示されるように、1次構造の代表的な単位セル(例えば、k番目の単位セル)は、5本の直線ワイヤ(即ち、0次構造)から構成される(パートI〜V)。垂直ワイヤ、パートI及びIIIはh(1)/2の長さを有し、パートIIはh(1)の長さを有する。水平ワイヤ、パートIV及びVは、l(1)の長さを有する。
[0297]図46aに示されるように、左端がクランプ留めされ、右端が相互接続平面内で軸力N(相互接続の2つの端部の間の方向に沿って)、剪断力Q(Nに直交)、及び屈曲モーメントMに供される、1次長方形相互接続について考える。曲がりくねった相互接続の幅(w)及び厚さ(t)は、構造を湾曲ビームとしてモデル化できるように、通常は長さよりも非常に小さい。u及びvは、それぞれ相互接続の軸方向(N及びQに平行)に沿った及び直交する、右端での変位を示し、θは回転角である(図46a)。それらは、
による相互接続内の歪みエネルギーW
(1)を介した(N,Q,M)に関係し、式中、W
(1)=(N,Q,M)T
(1)(N,Q,M)
T/2は、相互接続の線形弾性挙動に関するN、Q、及びMの2次関数であり;T
(1)は、1次相互接続の対称可撓性マトリックスであり、決定されるものである。歪みエネルギーは、全ての0次相互接続(パートI〜V)の歪みエネルギーW
(0)の合計にも等しく、即ち
であり、式中、W
k I〜W
k Vは、k番目の単位セルにおける各構成要素の歪みエネルギーを表す。0次構造、即ち、長さl及び屈曲剛性Elを持つ直線ワイヤの場合、ビーム理論は
のような可撓性マトリックスを与える[34]。ここで膜エネルギーは無視される。1次相互接続のk番目の単位セル自由体図(図46b)は、各ワイヤにおいて軸力、剪断力、及び屈曲モーメントを与え、次いで各0次相互接続の歪みエネルギーは、
として得ることができ、
但し、
である。方程式(9)から方程式(7)への置換は、1次及び0次相互接続の可撓性マトリックスの間に
として再帰式を与える。方程式(8)のT
(0)から上記方程式への置換は、単位セルの数m、高さ/間隔比η及びl
(1)に関して1次相互接続の可撓性の簡単な式を与える。
[0298]より高次(n)の構造に一般化する便宜上、可撓性マトリックスの下記の無次元形態を採用し、
式中、
は無次元であり、
は、
によって与えられる。0次構造、即ち長さλの直線ワイヤの場合、無次元可撓性マトリックスは
によって定義され、式中、
である。
2.3. 2次長方形相互接続の可撓性
[0299]2次相互接続の可撓性マトリックスの再帰式は、このセクションで確立する。2次構造の代表的な単位セルは、図47aに示されるように、3つの1次構造(パートI〜III)と、長さl(2)の2本の直線ワイヤ(即ち、0次構造)(パートIV及びV)から構成される。1次構造、パートI又はIIIは、m/2個(mは偶数)の単位セルからなり、パートIIはm個の単位セルからなる。
[0300]2次構造の歪みエネルギーは、
として、無次元可撓性マトリックスに関して表すことができ、式中、
は決定されるものである。歪みエネルギーは、全ての1次(パートI〜III、図47a)及び0次(パートIV及びV、図47a)相互接続における歪みエネルギーの合計にも等しく、即ち、
であり、式中、
は、パートII(1次構造、m単位セル)における歪みエネルギーであり、
は、方程式(10)における正規化D
IIであり(l
(1)及びh
(1)がそれぞれl
(2)及びh
(2)により置き換えられている。);
は、パートIV及びV[0次構造、長さλ=l
(2)]における歪みエネルギーであり、
及び
は、方程式(10)における正規化D
IV及びD
Vであり[l
(1)及びh
(1)がそれぞれl
(2)及びh
(2)により置き換えられている。];
は、パートI及びIII(1次構造、m/2単位セル)における歪みエネルギーであり、
及び
は、方程式(10)における正規化D
I及びD
IIIである[l
(1)及びh
(1)が、それぞれl
(2)及びh
(2)により置き換えられている。]。
[0301]方程式(18)〜(20)の、方程式(17)への置換により、2次相互接続の可撓性マトリックスの再帰式が、
として得られ、式中、
は、恒等式
から得られる。
[0302]方程式(15)及び(14)における
及び
の、方程式(21)への置換により、
が、
として得られ、式中、f=η
2+η+1である。
2.4.高次長方形相互接続の可撓性
[0303]より高次(n≧3)の長方形相互接続の場合、代表的な単位セルは、3つの(n−1)次構造(パートI及びIII)と、2つの(n−2)次構造(パートIV及びV)とから構成される。(n−1)次構造、パートI又はIIIは、m/2(mは、偶数の整数である。)単位セルからなり、パートIIは、m単位セルからなる。再帰式(21)は、
になり
1、式中
である。
[0304]1(n−2)次構造(例えば、n=3の場合には、図47bにおけるパートIV及びV)は、(n−2)次幾何形状で(mh+1/2)単位セルを有する。しかし、可撓性全体に対する(n−2)次構造の寄与は、(n−1)次構造の場合よりも非常に小さいので、パートIV及びVの無次元可撓性は、FEAにより示されるようにさらに良好な精度をもたらす、m単位セルを有する自己相似(n−2)次構造によって近似することができる。
3.一般化自己相似相互接続
[0305]セクション2における自己相似長方形相互接続の解析モデルを、このセクションでは一般化自己相似長方形及び蛇行相互接続にまで拡張する。
3.1.一般化自己相似長方形相互接続
[0306]一般化長方形相互接続は、長方形の形状を示したままであり(図48参照)、しかし異なる次数全体に関して同じ高さ/間隔比を必要とせず、同じ数の単位セルも必要としない。各次数は、それ自体の高さ/間隔比η
(i)及び単位セルの数m
(i)(i=1...n)を有していてもよく、m
(n)のみを奇数とすることができ、m
(1)〜m
(n)は偶数でなければならない。図48は、一般化3次自己相似長方形相互接続を示す。n次一般化自己相似長方形相互接続の場合、幾何学的関係(1)〜(3)は、
h
(i)=η
(i)l
(i) (26)
h
(i)=2m
(i−1)l
(i−1) (i=2...n) (27)
になる。
[0307]方程式(15)における可撓性マトリックス
は同じままであるが、
に関して方程式(14)におけるm及びηは、それぞれm
(1)及びη
(1)によって置き換えなければならない。方程式(21)における
及び方程式(25)における
(n≧3)の再帰式は、ここでは
になり、
である。
3.2.一般化自己相似蛇行相互接続
[0308]図45b及び45cは、Xuらの実験[19]にあるように、長方形構成の鋭い角を半円により置き換えた一般化自己相似蛇行相互接続を示す。1次蛇行相互接続は、図45cの黒色ボックスで示されるように、半円[直径l
(1)]によって接続された直線ワイヤ[長さh
(1)〜l
(1)]からなる。図45cの青色ボックスで示される2次蛇行相互接続の代表的な単位セルは、長さl
(2)の2本の(水平)直線ワイヤと、3つの(垂直)1次蛇行相互接続(2つの長さがh
(2)/2であり、1つの長さがh
(2)である。)とから構成される。直線ワイヤの可撓性マトリックス
は、方程式(15)によってさらに与えられ、1次蛇行相互接続の可撓性マトリックス
は、[31]
として得られ、式中、g=η
(1)−1である。
[0309]2次〜4次(及びさらに高い)次数の幾何形状は全て、長方形幾何形状を示し(図45cに示されるように)、これらは厳密に言えば、自己相似性が2次相互接続でのみ開始されることを示している。自己相似蛇行構造(図45c)と長方形構造(図45b)との比較は、それらの1次幾何形状のみが異なることを示唆している。したがって、方程式(29)及び(30)における再帰式は、自己相似蛇行構造のために保持されたままである。
[0310]方程式(15)における
及び方程式(14)における
の、方程式(31)への置換により、
が
として得られ、式中、p=η
(2)[2η
(1)+π−2]+2である。
[0311]図49a及び49bは、無次元可撓性の構成要素対自己相似長方形及び蛇行相互接続の次数(n)であって高さ/間隔比が
であり単位セル数がm=4であるものを示す。長方形相互接続は、曲がりくねった接続よりも僅かに軟質である。解析結果は、弾性率E
Cu=119GPaであり且つポアソン比v
Cu=0.34である銅接続に関し、図49a及び49bでも示されるようにFEAによって検証される。構成要素T
13は常にゼロであり、したがって図示していない。その他の5つの可撓性構成要素は全て、nと共に増大し、1だけ増大する各nごとに2倍超になる。1〜4のnの場合、これらの構成要素は17倍超増大し、より高い次数の相互接続が、より低い次数のものよりもさらに軟質になることを示している。
4.伸縮性
[0312]相互接続は、2つの剛性デバイス島の間の空間に常に跨り(例えば、図45aにあるように)、これらは2つの端部がクランプ留めされた境界条件に対応している。自己相似相互接続(n次)の伸長u
0の場合、境界条件はu=u
0、v=0、及びθ=0であり、次いで方程式(13)は反力N及びQと、屈曲モーメントMを
として与えるが、それは
だからである。長方形及び蛇行構成に関する最大歪みは、セクション4.1及び4.2で別々に解析される。比較的厚い自己相似長方形又は蛇行相互接続の伸縮性に関する実験結果は利用できないので、本発明者らは、解析結果とFEA結果とを検証のために比較するだけである。伸縮性の実験測定、及び解析結果との比較は、本発明者らの将来に研究で考慮されることになる。
4.1.一般化自己相似長方形相互接続
[0313]1次長方形相互接続の場合、FEA結果によって十分裏付けられている図66aで示されるように、荷重点から3番目に近い隅に最大歪みが生ずることを示すことができる。次いで相互接続における最大歪みを、
として正確に得ることができる。n≧2の、より高い次数の構造では、最大歪みは、
によって十分近似することができる。降伏基準ε
最大=ε
降伏(式中、ε
降伏は、相互接続材料の降伏歪み(例えば、銅の場合は0.3%[35])である。)に基づいて、一般化自己相似長方形相互接続の伸縮性が、
として得られる。
[0314]印加歪みが伸縮性よりも小さい場合、相互接続は、線形の可逆的変形を受け、塑性変形は蓄積されないと考えられ、その結果、相互接続は周期的荷重下で塑性疲労を受けることはなくなると考えられる。方程式(35a)及び(35b)は、伸縮性がε降伏l(n)/wに線形比例することを明らかに示す。したがって、伸縮性を増強させるために、ナノ粒状サイズの銅又は変形金属ナノ複合体など[36]、高い降伏強度及び比較的低い弾性率を有する金属材料を採用して、高い降伏歪みが得られるようにすることがより良好である。
4.2.一般化自己相似蛇行相互接続
[0315]図66bに示されるような1次蛇行相互接続の場合、最大歪みは、2つの端部に最も近い又は2番目に近い半円で常に生ずる。ψ(0≦ψ≦π)は、この半円の場所を表す。円上の屈曲歪みは、
によって与えることができる。ψ=tan
−1(−N/Q)で最大値に到達し、最大歪みは
によって与えられる。次いで1次蛇行相互接続の伸縮性は、[方程式(33)を介して]
として得られる。正規化された伸縮性ε
伸縮性w/[ε
降伏l
(1)]は、高さ/間隔比η
(1)及び単位セル数m
(1)にのみ依存する。これは図50に示されるようにη
(1)及びm
(1)の両方と共に増大し、m
(1)→∞の場合(図50にも示されるように)、
に飽和する。
[0316]より高い次数(n≧2)の曲がりくねった相互接続の場合、方程式(35b)は、曲がりくねった相互接続に関する方程式(32)における対応する可撓性マトリックス
及び方程式(30)における
と一緒に、図51に示されるFEAに比べて優れた近似を伸縮性に与える。
[0317]図52は、正規化された伸縮性、ε
伸縮性w/[ε
降伏l
(n)]対自己相似長方形及び蛇行相互接続に関する次数nを示し、異なる次数での高さ/間隔比
及び単位セル数m=4を示す。伸縮性は、1増加する各nごとに2倍超であり、より高い次数の自己相似デザインを採用することによって、相互接続の弾性限界を十分改善できることを示している。図52は、解析モデルがFEA結果に非常にうまく一致することも示す。
[0318]上記解析モデル及びFEA結果は全て、無限小変形に関するものである。図67は、伸縮性に対する有限変形(FEAにより決定される。)の影響が、幾何学的パラメータの様々な組合せにより1次及び2次蛇行相互接続の両方の場合には無視できることを示す。したがって、上記解析モデルは、伸縮性の良好な推測を行う。実際の製作では、ミクロスケールの自己相似蛇行相互接続は、ラインの特に側壁に沿ったリソグラフィ欠陥により不完全になる可能性があり、そのような不完全性は、自己相似次数が増大するときに生じ得るパターンサイズ(即ち、金属幅及び丸め半径)の減少と共に、増大することになる。これらの幾何学的不完全性は、本発明の研究において説明されていない。
5.伸縮性エレクトロニクスに関する自己相似蛇行相互接続の最適な設計
[0319]伸縮性エレクトロニクスの2つの競合する目標[19、37]は、1)デバイス島間に小さい間隔を必要とする(図53a)、能動デバイスの高表面充填比と;2)デバイス島間に大きい間隔を要する、システムの大きい伸縮性とである。直線又は従来の蛇行相互接続の座屈に基づく従来の手法は、約100%の伸縮性を実現する[17、18、28、30]。システムの伸縮性
は、
(式中、fは表面充填比を示す。)
による相互接続の、その
に関係する。能動デバイスの約50%の表面充填比の場合、相互接続の約100%の伸縮性は、システムの約30%の伸縮性に換算され、これは伸縮性エレクトロニクスのいくつかのバイオ医薬の適用例(皮膚、心臓、又は肘への)では低い値である。セクション3及び4での解析モデルは、2つの競合する上記目標を同時に達成するように、一般化自己相似相互接続の設計を導くことができる。
[0320]2次蛇行相互接続は、代表的なサイズがH=1mmであり表面充填比が50%である四角形の形状のデバイス島において(図53a)設計最適化を示すように研究される。金属相互接続を製作するためのフォトリソグラフィ技術[38、39]には、幅w≧10μm、丸め半径r丸め≧10μm、及び隣接する円弧間の距離d≧5μmなどのいくつかの制約がある(図53a)。その他の幾何学的パラメータは、大きな伸縮性を実現するように最適化される。図53bは、単位セル数m(2)と共に伸縮性が増大することを示す。図53bの右パネルは、相互接続の約308%の伸縮性を与え且つシステムの約90%の伸縮性に該当する最適設計を示し、座屈相互接続を使用した依然の設計[18、28]よりも優れている。さらに大きい表面充填比70%であっても、方程式(40)は依然として約50%のシステム伸縮性を与える。
6.結論
[0321]この実施例は、自己相似相互接続に関する可撓性及び伸縮性の解析モデルを開発する。容易な設計最適化の後に、FEAにより検証された解析モデルは、より高い次数の自己相似相互接続が、能動デバイスの50%の表面充填比で約90%、又は70%の表面充填比に関して>50%などの、非常に大きいシステム伸縮性を与えることを示す。解析モデルは、伸縮性光起電力装置[11]及び電子眼球カメラ[12]などの能動デバイスの大面積カバレッジを同時に求める伸縮性エレクトロニクスの開発に有用である。自己相似蛇行構成の概念は、伸縮性増強のその他の戦略、例えば皺が寄ったパターンの制御とさらに組み合わせて、高いレベルの伸縮性を、基板に結合された相互接続に与えることができる。
参考文献
[0322] [1] Lacour SP, Jones J,Wagner S, Li T, and Suo ZG. Proc IEEE 2005;93:1459.
[0323] [2] Lacour SP, Wagner S,Huang ZY, and Suo Z. Appl Phys Lett 2003;82:2404.
[0324] [3] Lacour SP, Wagner S,Narayan RJ, Li T, and Suo ZG. J Appl Phys 2006;100: 014913.
[0325] [4] Khang DY, Jiang HQ, HuangY, and Rogers JA. Science 2006;311:208.
[0326] [5] Kim DH, Ahn JH, Choi WM,Kim HS, Kim TH, Song JZ, Huang YGY, Liu ZJ, Lu C, and Rogers JA. Science 2008;320:507.
[0327] [6] Sekitani T, Noguchi Y,Hata K, Fukushima T, Aida T, and Someya T. Science 2008;321:1468.
[0328] [7] Sekitani T, Nakajima H,Maeda H, Fukushima T, Aida T, Hata K, and Someya T. Nat Mater 2009;8:494.
[0329] [8] Kim DH, Lu NS, Ma R, KimYS, Kim RH, Wang SD, Wu J, Won SM, Tao H, Islam A, Yu KJ, Kim TI, Chowdhury R,Ying M, Xu LZ, Li M, Chung HJ, Keum H, McCormick M, Liu P, Zhang YW, Omenetto FG,Huang YG, Coleman T, and Rogers JA. Science 2011;333:838.
[0330] [9] Song YM, Xie YZ,Malyarchuk V, Xiao JL, Jung I, Choi KJ, Liu ZJ, Park H, Lu CF, Kim RH, Li R,Crozier KB, Huang YG, and Rogers JA. Nature 2013;497:95.
[0331] [10] Duan YQ, Huang YA, andYin ZP. Thin Solid Films 2013;544:152.
[0332] [11] Yoon J, Baca AJ, ParkSI, Elvikis P, Geddes JB, Li LF, Kim RH, Xiao JL, Wang SD, Kim TH, Motala MJ,Ahn BY, Duoss EB, Lewis JA, Nuzzo RG, Ferreira PM, Huang YG, Rockett A, andRogers JA. Nat Mater 2008;7:907.
[0333] [12] Ko HC, Stoykovich MP,Song JZ, Malyarchuk V, Choi WM, Yu CJ, Geddes JB, Xiao JL, Wang SD, Huang YG,and Rogers JA. Nature 2008;454:748.
[0334] [13] Wagner S, Lacour SP,Jones J, Hsu PHI, Sturm JC, Li T, and Suo ZG. Physica E 2004;25:326.
[0335] [14] Someya T, Sekitani T,Iba S, Kato Y, Kawaguchi H, and Sakurai T. P Natl Acad Sci USA 2004;101:9966.
[0336] [15] Mannsfeld SCB, Tee BCK,Stoltenberg RM, Chen C, Barman S, Muir BVO, Sokolov AN, Reese C, and Bao ZN.Nat Mater 2010;9:859.
[0337] [16] Saeidpourazar R, Li R,Li YH, Sangid MD, Lu CF, Huang YG, Rogers JA, and Ferreira PM. JMicroelectromech Syst 2012;21:1049.
[0338] [17] Kim DH, Song JZ, ChoiWM, Kim HS, Kim RH, Liu ZJ, Huang YY, Hwang KC, Zhang YW, and Rogers JA. P NatlAcad Sci USA 2008;105:18675.
[0339] [18] Lee J, Wu JA, Shi MX,Yoon J, Park SI, Li M, Liu ZJ, Huang YG, and Rogers JA. Adv Mater 2011;23:986.
[0340] [19] Xu S, Zhang YH, Cho J,Lee J, Huang X, Jia L, Fan JA, Su YW, Su J, Zhang HG, Cheng HY, Lu BW, Yu CJ,Chuang C, Kim TI, Song T, Shigeta K, Kang S, Dagdeviren C, Petrov I, Braun PV,Huang Y, Paik U, and Rogers JA. Nat Commun 2013;4:1543.
[0341] [20] Kim RH, Tao H, Kim TI,Zhang YH, Kim S, Panilaitis B, Yang MM, Kim DH, Jung YH, Kim BH, Li YH, HuangYG, Omenetto FG, and Rogers JA. Small 2012;8:2812.
[0342] [21] Jones J, Lacour SP,Wagner S, and Suo ZG. J Vac Sci Technol A 2004;22:1723.
[0343] [22] Gonzalez M, Axisa F,Bossuyt F, Hsu YY, Vandevelde B, and Vanfleteren J. Circuit World 2009;35:22.
[0344] [23] Gonzalez M, Axisa F,BuIcke MV, Brosteaux D, Vandevelde B, and Vanfleteren J. Microelectron Reliab2008;48:825.
[0345] [24] van der Sluis O, Hsu YY,Timmermans PHM, Gonzalez M, and Hoefnagels JPM. J Phys D-Appl Phys 2011;44:034008.
[0346] [25] Hsu YY, Gonzalez M,Bossuyt F, Axisa F, Vanfleteren J, and De Wolf I. J Mater Res 2009;24:3573.
[0347] [26] Hsu YY, Gonzalez M,Bossuyt F, Axisa F, Vanfleteren J, and DeWolf I. J Micromech Microeng 2010;20:075036.
[0348] [27] Hsu YY, Gonzalez M,Bossuyt F, Vanfleteren J, and De Wolf I. IEEE T Electron Dev 2011;58:2680.
[0349] [28] Lee J, Wu J, Ryu JH, LiuZJ, Meitl M, Zhang YW, Huang YG, and Rogers JA. Small 2012;8:1851.
[0350] [29] Sun YG, Choi WM, JiangHQ, Huang YGY, and Rogers JA. Nat Nanotechnol 2006;1:201.
[0351] [30] Kim DH, Liu ZJ, Kim YS,Wu J, Song JZ, Kim HS, Huang YG, Hwang KC, Zhang YW, and Rogers JA. Small 2009;5:2841.
[0352] [31] Zhang YH, Xu S, Fu HR,Lee J, Su J, Hwang KC, Rogers JA, and Huang Y. Soft Matter 2013;9:8062.
[0353] [32] Kim DH, Wang SD, Keum H,Ghaffari R, Kim YS, Tao H, Panilaitis B, Li M, Kang Z, Omenetto F, Huang YG,and Rogers JA. Small 2012;8:3263.
[0354] [33] Su YW, Wu J, Fan ZC,Hwang KC, Song JZ, Huang YG, and Rogers JA. J Mech Phys Solids 2012;60:487.
[0355] [34] Timoshenko S, and GereJ. Theory of Elastic Stability. New York: McGraw-Hill, 1961.
[0356] [35] William FR, Leroy DS,and Don HM. Mechanics of Materials. New York: Jon Wiley & Sons, 1999.
[0357] [36] Hao SJ, Cui LS, JiangDQ, Han XD, Ren Y, Jiang J, Liu YN, Liu ZY, Mao SC, Wang YD, Li Y, Ren XB, DingXD, Wang S, Yu C, Shi XB, Du MS, Yang F, Zheng YJ, Zhang Z, Li XD, Brown DE,and Li J. Science 2013;339:1191.
[0358] [37] Rogers JA, Someya T, andHuang YG. Science 2010;327:1603.
[0359] [38] Meitl MA, Zhu ZT, KumarV, Lee KJ, Feng X, Huang YY, Adesida I, Nuzzo RG, and Rogers JA. Nat Mater2006;5:33.
[0360] [39] Carlson A, Bowen AM,Huang YG, Nuzzo RG, and Rogers JA. Adv Mater 2012;24:5284.
実施例4:フラクタル吸収型デザインを有する伸縮性相互接続に関する階層計算モデル
要約
[0361]高面積カバレッジの機能性構成要素、小サイズのアンテナ、及び/又は磁気共鳴撮像下で不可視性の電極を必要とする、伸縮性エレクトロニクスは、フラクタル吸収型レイアウトを採用する電気配線構造の使用から利益を得ることができる。そのようなデザインを持つ高次相互接続/電極/アンテナに固有の複雑で多様なミクロ構造により、従来の有限要素解析(FEA)に基づく従来の非線形座屈後解析は、厄介であり時間を浪費する可能性がある。ここで本発明者らは、伸張下で「自己相似」と依然から呼ばれているデザインの、フラクタル吸収型相互接続の座屈後解析に関し、規則正しいラベリングのメカニズムに基づく階層計算モデル(HCM)を紹介する。モデルは、従来の手法の計算の労力を何桁も低減させるが、実験及びFEAによって検証されるように正確な予測がなされる。フラクタル次数が1から4に増大するにつれ、弾性伸縮性は約200倍増強することができ、フラクタルデザインにおける簡単な概念の利点を明らかに示している。これらの結果及び一般的なモデルは、広範な種類の伸縮性エレクトロニクスシステムの最適な設計の開発において活用することができる。
1.序論
[0362]伸縮性/可撓性エレクトロニクス(Lacourら、2005;Khangら、2006;Lacourら、2006;Jiangら、2007;Jiangら、2008;Sekitaniら、2009;Rogersら、2010;Huangら、2012;Yang及びLu、2013;Duanら、2014)及びオプトエレクトロニクス(Kimら、2010;Leeら、2011a;Lipomiら、2011;Nelsonら、2011)に関するメカニズム及び材料の最近の進歩は、高性能半導体機能性を有するシステムを、極端な機械変形を可能にする形、例えばゴムバンドのような伸張、ロープのような捩り、及び紙シートのような屈曲を可能にする形で実現できることを実証する。この種類の技術は、「表皮」健康/ウェルネスモニタ(Kimら、 2011b;Kaltenbrunnerら、2013;Schwartzら、2013)から、軟質外科用器具(Cottonら、2009;Yuら、2009;Viventiら、2010;Graudejusら、2012;Kimら、2012b)、眼球様デジタルカメラ(Koら、2008;Songら、2013)、感受性あるロボットの皮膚(Someyaら、2004;Wagnerら、2004;Mannsfeldら、2010;Luら、2012)にまで及ぶ、確立された技術では対処できない多くの適用機会をもたらす。これら伸縮性システムの多くは、島−橋デザインとして時々公知の戦略(Kimら、2008;Koら、2008;Kimら、2009;Kimら、2011b;Leeら、2011b)を活用し、その場合、能動デバイスは、間に変形性相互接続(即ち、橋)を有する非変形性プラットフォーム(即ち、島)上に在る。これらの橋は伸縮性を提供し、一方、島は、無視できる変形(通常、<1%の歪み)を受けて、能動デバイスの機械的統合性を確実にする(Kimら、2008;Songら、2009)。島の、ある充填比を有するシステムの伸縮性は、
により書き留めることができる。様々なタイプの相互接続技術が開発されており、典型的には、平面蛇行(Jonesら、2004;Lacourら、2005;Liら、2005;Gonzalezら、2008;Kimら、2008;Hsuら、2009;Kimら、2011b;Kimら、2012c;Zhangら、2013c)又は非同一平面蛇行若しくは直線ブリッジ(Kimら、2008;Koら、2008;Leeら、2011b)が含まれる。多くの公表された技術において、そのような相互接続は、充填比を著しく犠牲にしないシステムにおいて、<50%の全伸縮性(亀裂の発生により定義される。)及び<25%の弾性伸縮性(塑性変形の発生により定義される。)を提供する。多くの適用例、特にオプトエレクトロニクス(Koら、2008;Kimら、2010)及びエネルギー貯蔵ステム(Lipomiら、2011;Xuら、2013)におけるものは、高い充填比も必要とする。ここでは先進の相互接続が必要である。
[0363]最近、Xuら(2013)は、前述の難題に対処するために、単純なフラクタル吸収型レイアウトに曲がりくねったパターンを組み込む(図54a参照)空間充填曲線のタイプに基づく設計を報告した。フラクタル吸収型レイアウトを有する階層構造は、表面接着、剛性、及び材料強度を増強し又はさらに制御することができるものが、多くの生体系で存在することが示されている(Gaoら、2005;Yao及びGao、2006;Yao及びGao、2007;Zhangら、2011;Liら、2012;Zhangら、2012;Liら、2013)。当初、「自己相似」デザインと呼ばれていたこの技術は(Xuら、2013)、全伸縮性及び弾性伸縮性がそれぞれ約300%及び約160%であり充填比が約33%である、伸縮性リチウムイオンバッテリを可能にする。この好ましいメカニズムの原因として基礎をなすメカニズムは、図54bに示されるように、実験及び有限要素解析(FEA)の両方によって研究された。結果は、規則正しいラベリングのメカニズムを明らかにする。特に、伸長が0%から約150%まで進行することにより、2次構造(即ち、大きいばね)は最初に平面外屈曲及び座屈を経た捩れを介して解かれ、その間、1次構造(即ち、小さいばね)における変形は本質的に存在しない(図54b、上部4画像参照)。1次構造のラベリングは、印加歪み約150%に相当する2次構造が完全に伸びたときにのみ、開始される。さらに、1次構造がそのほぼ最大限にまで伸長した場合、大きい伸縮性(約300%)が実現される(図54b、下部3画像参照)。活物質だけが、このバッテリデザインにおいて軟質基板に結合し、その結果、相互接続は自由に変形できるようになる。いくつかのバイオ医薬の適用例では(Kimら、2011b;Kimら、2012c)、曲がりくねった相互接続が軟質基板に結合され又は包封され、得られた変形メカニズムは、自立相互接続とは全く異なっていてもよく(Zhangら、2013b)、しかしそのような態様は、本実施例の範囲を超えるものである。
[0364]図54aに示される、島−橋のデザインにある能動デバイスの充填比は、33%である。弾性伸縮性(約150%)は、90%及び98%の充填比に関してそれぞれ22%及び4.3%に低減する。これらの弾性伸縮性レベルは、歪み(例えば、皮膚、心臓、又は肘)が20%を十分に超える可能性のある、皮膚載置型エレクトロニクス(Kimら、2011b;Yingら、2012;Webbら、2013)及び膨張式カテーテル技術(Kimら、2011a;Kimら、2012a)などのいくつかのバイオ医薬の適用例を満足させることができない。最も実現可能な解決策は、フラクタル次数を図54aの2から図55の3及び4又はそれ以上に高く増大させることである。しかし、フラクタル次数が4の場合、従来のFEA手法は、多数の要素(>百万)及び高度に非線形の座屈後解析により、法外に時間を消費するようになる。そのような計算手法は、迅速なデバイス設計及び最適化に実用的でない。
[0365]本実施例の目的は、フラクタル吸収型レイアウトを持つ曲がりくねった相互接続(以後、「フラクタル相互接続」と呼ぶ。)の座屈後解析のため、図54に示される規則正しいラベリングのメカニズムに基づいて、有効且つ堅牢な階層計算モデル(HCM)を開発することである。伸長下にあるn次フラクタル相互接続の場合、より低い次数の構造(≦n−1)は最初に解かれることはなく、屈曲し捩れるだけである。その結果、これらのより低い次数の構造を、図56に示されるように、有効な張力、屈曲、及び捩れ可撓性を持つ直線ビームとしてモデル化することができる。最高(n番目)次数構造が完全に伸長すると、(n−1)次構造のラベリングが開始されるが、(n−2)次及びより低い次数の構造は、依然として解かれることはなく、ビームとしてモデル化することができる。このプロセスを、1次構造が解かれ且つ全伸縮性に最終的に到達するまで継続する。そのような手法は、各次数で直線ビームの屈曲及び捩れのみが関与するので、計算の労力が実質的に節約される。この単純化は、従来のFEAを使用することで非常に難しくなる可能性のある、高次(ここで本発明者らが実証するように、4まで)フラクタル相互接続のシミュレーションを、可能にする。この組の計算は、伸縮性に対してフラクタル次数の有意な効果を示すだけでなく、高次フラクタル相互接続を使用したデザインの基準も提供する。実施例を、以下に概説する。セクション2は、フラクタル相互接続の任意の次数(n≧2)に関して、均等な可撓性を決定する。セクション3は、座屈後プロセスの規則正しいラベリングに関するHCMについて記述する。セクション4は、弾性伸縮性に対するフラクタル次数の作用を研究するのに、HCMを適用する。一般化フラクタル相互接続をセクション5で研究し、その結果を、実験及び従来のFEAにより検証する。
2.フラクタル相互接続の均等な可撓性
2.1 幾何形状
[0366]1次相互接続は、この実施例では4個の単位セルを有する、図55の黒色ボックスで示されるような直列に接続された直線ワイヤ及び半円からなる。図55の青色ボックスに示される2次相互接続は、1次相互接続のスケールを縮小し、その後、90°回転させ、次いでそれらを当初の幾何形状のレイアウトが再現されるように接続することによって、生成される。図55中の広い青色ラインは、1次幾何形状に類似した(丸みの付いた部分以外)2次幾何形状を表す。同じ手順を実施することにより、本発明者らは、図55の赤色及び紫色ボックスで示されるように3次及び4次相互接続を生成することができ、これらの赤色及び紫色のラインはそれぞれ3次及び4次幾何形状を示している。2次〜4次(及びそれ以上)幾何形状は全て、同じ長方形の形状を示し、同じ数の単位セルを有することが明らかであり、これは厳密に言えば、フラクタルが2次でのみ開始されることを示す。
[0367]ηは、高さh
(i)がh
(i)=ηl
(i)によってi(i=1...n)次(図55)の間隔l
(i)に関係付けられるような、各次数での高さ/間隔のアスペクト比を示す。高さh
(i)は、h
(i)=2ml
(i−1)(i=2...n)として、単位セル数m(図55)によって隣接する次数の間隔l
(i−1)にも関係付けられる。次いで任意の次数iでの間隔及び高さは、
によって、最高次数l
(n)の間隔と共に拡大縮小される。結果は、フラクタル相互接続が、1つの基本長さ(l
(n))及び3つの無次元パラメータ、即ちフラクタル次数(n)、高さ/間隔比(η)、及び単位セル数(m)によって特徴付けられることを示す。
2.2.均等な可撓性
[0368]フラクタル相互接続は、その幅(w)及び厚さ(t)が長さよりも非常に小さい場合、ビームとしてモデル化することができる。図56aは、左端がクランプ留めされ且つ右端が力及び屈曲モーメントに供された、n次フラクタル相互接続を示す。右端の軸力N、平面内剪断力Q
y、及び屈曲モーメントM
zは、端部の変位u
x及びu
yと回転θ
zとによって表される平面内変形を誘発させ、一方、右端の平面外剪断力Q
z及び屈曲モーメントM
yとトルクM
xは、平面外変位u
zと回転θ
x及びθ
yとをその端部で生成する。正規化された変位、回転、力、屈曲モーメント、及びトルクは、
によって関係付けられ、式中、(EI)
平面内=Ew
3t/12及び(EI)
平面外=Ewt
3/12は、それぞれ平面内及び平面外屈曲剛性であり、
及び
は、解析によって得ることができる(補遺参照)、正規化された弾性可撓性マトリックスである。例えば、1次フラクタル相互接続に関する平面内可撓性マトリックスは、
であり、式中、Symは対称マトリックスを示し、g=η−1である。1次フラクタル相互接続に関する平面外可撓性マトリックスは、
であり、式中、vはポアソン比であり、k=[4(1+v)g+(3+v)π]/4である。2次フラクタル相互接続の場合、平面内可撓性マトリックスは、
であり、式中、p=2η
2+(π−2)η+2であり、
及び
は、方程式(4a)における11及び22の構成要素であり、これらはそれぞれ、引張り及び平面内剪断可撓性に該当する。2次フラクタル相互接続に関する平面外可撓性マトリックスは、
であり、式中、
は補遺で与えられる。より高い次数(n≧3)のフラクタル相互接続の場合、
及び
は、(n−1)次及び(n−2)次に関する可撓性マトリックスを介して(補遺参照)、再帰式で得られる。
[0369]方程式(4)及び(5)と補遺の再帰式とから得られる可撓性は、フラクタル次数と共に増大する。例えば引張り成分
は、n=1の場合の15.4からn=2の場合の40.1及びn=3の場合の105まで増大し、即ち、フラクタル次数の各増大ごとに2.6倍になる。長さl
(n)もnと共に増大することを考えると、対応する引張り可撓性(正規化なし)は、フラクタル次数と共にさらに迅速に増大する。実験の場合のように(Xuら、2013)、(EI)
平面内=7.44×10
−10N・m
2及びl
(1)=110μmであると、引張り可撓性はn=1の場合の0.0276m/Nからn=2の場合の2.62m/N及びn=3の場合の250m/Nまで増大し、即ち、各次数の増大ごとに約100倍増大する。可撓性がフラクタル次数と共に非常に急速に増大するという事実は、セクション3におけるHCMの開発で極めて重要な役割を演ずることになる。
3.フラクタル相互接続の規則正しいラベリングに関する階層計算モデル
[0370]4単位セル(m=4)に関して図56aに示されるように、n次フラクタル相互接続は、垂直(y)方向に沿って配向した(n−1)次相互接続及び水平(x)方向に沿って配向した(n−2)次相互接続から構成される。任意のより低い次数の相互接続のラベリング前に、(n−1)次及び(n−2)次相互接続を、セクション2で得られた均等な可撓性T(n−1)及びT(n−2)を有する直線ビーム(それぞれ、図56b中の青色及びオレンジ色)としてモデル化する。下記のセクションで示されるように、そのような手法は正確な結果を与えるが、各次数での計算は、直線ビームしか含まないので非常に単純である。
[0371]図57に示される2次フラクタル相互接続は、手法を示す例として使用される。座屈後プロセスは、2段階に分類することができる。
[0372](i)段階I:図57aに示されるような2次フラクタル相互接続のラベリング。垂直な1次フラクタル相互接続は、方程式(4)で与えられた可撓性を有する直線ビーム(図57a中、青色)によって表される(図57aで褐色により示される水平セグメントは、既に直線ビームである。)。FEAは、伸長下で構成全体を決定するために、直線ビームのこの均等な構造に使用される。段階Iは、直線ビームの均等な構造が完全に解かれたとき、即ち、2つの端部の間の距離が全ての直線ビームの全長に達したときに終了する。2つの端部間の距離の増加パーセンテージによって定義される印加歪みε
印加は、段階Iの終わりに、2次フラクタル相互接続の臨界値
に到達する。
最初に垂直な1次フラクタル相互接続(青色)は、段階Iの終わりにほぼ水平になる(図4a)。それらの変形は、以下に論じるように、段階IIにおける解析が単一の1次フラクタル相互接続のラベリングに焦点を当てることができるように、単位セルの周期性に起因して本質的に同じである。
[0373](ii)段階II:図57bに示されるような、各1次フラクタル相互接続のラベリング。段階IIにおける伸長は、それらの引張り可撓性が直線ビーム(褐色)の場合よりも非常に大きいので、主に(水平に位置合わせされた)1次フラクタル相互接続(図57a中、青色)により吸収される。それによって、直線ビームの変形が無視でき、単一の1次フラクタル相互接続(例えば、図57bのCD)のみがFEAによって解析され(全ての1次相互接続は本質的に同じ変形を有するので)、それが計算コストを実質的に削減する。段階IIにおける追加の伸長
は、2次フラクタル相互接続の、2つの端部の間の追加の変位
に対応するが、この変位は、段階IIにおける各1次フラクタル相互接続のFEAでの伸長変位
と解釈される。段階IIは、各1次相互接続が完全に解かれてその長さm[2h
(1)+(π−2)l
(1)]に達したときに終了する。
[0374]上記にて紹介されたHCMは、より高い次数(n≧3)のフラクタル相互接続にも適用可能である。n次フラクタル相互接続の場合、その(最初に垂直な)(n−1)次及び(水平な)(n−2)次相互接続が、段階Iで直線ビームとしてモデル化され、その後、段階IIで(n−1)次フラクタル相互接続のラベリングが行われる。n次及び(n−1)次の両方の相互接続から得られた全ての(n−2)次フラクタル相互接続は、段階IIの後にさらに伸長することによってラベリングを開始する。このプロセスは、1次フラクタル相互接続が解かれるまで、全てのより低い次数に関して繰り返される。
4.弾性伸縮性及び変形パターンに対するフラクタル次数の影響
[0375]セクション3のHCMは、高さ/間隔のアスペクト比
及び単位セル数m=4を有する1次〜4次フラクタル相互接続に関して図55に示されるように、多数の単位セルを有する高次フラクタル相互接続の座屈後挙動を研究することを可能にする。銅相互接続は、弾性の理想的な塑性構成モデル(Hill、1950)において、弾性率E
Cu=119GPa、ポアソン比v
Cu=0.34、及び降伏歪み0.3%(Williamら、1999)を有する。結果は、従来のFEAによればより高い次数(n≧4)の相互接続の解析が極めて難しくなる可能性があり且つ時間を浪費する可能性があるので、フラクタル次数n≦3の場合に従来のFEA(HCMにおいて、いかなる近似もない。)によって検証する。
[0376]弾性伸縮性は、相互接続での最大歪みが材料の降伏歪み(0.3%、Williamら(1999))に達した場合、印加歪みである。図58は、
及びm=4に関する、弾性伸縮性対フラクタル相互接続の次数nを示す。断面における厚さ/幅のアスペクト比はt/w=0.03であり、幅と間隔との比はw/l
(1)=0.4である。結果は、n≦3の場合に従来のFEAに非常にうまく一致する。nが1ずつ増加するごとに、弾性伸縮性は>3倍増大するが、これは高次フラクタルデザインが弾性限界を実質的に改善できることを示唆している。例えば、弾性伸縮性は、1次の場合の約10.7%から4次の場合の約2140%まで、約200倍増大する。
[0377]図59〜62は、フラクタル相互接続における最大主歪みと、1〜4のフラクタル次数に関する変形パターンの発生とをそれぞれ示す。1次フラクタル相互接続(図59)の場合、最大主歪みは印加歪みと共に急速に増大し、降伏歪み0.3%に迅速に到達し、そこでは相互接続は、未だラベリングを終了するには程遠く、したがって僅か10.7%の弾性伸縮性をもたらす。2次フラクタル相互接続(図60a)の場合、最大主歪みは、ラベリングが2次構造で開始するときは最初にゆっくり増大し、しかしその後、印加歪みが150%<ε印加<240%の範囲にある場合、(2次構造の)ラベリングの終わり近くで「歪み硬化」を示す(図60b)。降伏歪み0.3%には、歪み硬化中に到達し、192%の弾性伸縮性をもたらす。フラクタル相互接続が3次の場合(図61a)、最高次数(3次)及び次の次数(2次)構造のラベリング(の終わり)にそれぞれ対応する歪み硬化の2つの範囲、150%<ε印加<240%及び500%<ε印加<820%がある(図61b)。降伏歪み0.3%には、後者の歪み硬化(2次構造のラベリングに該当する。)中に到達し、747%の弾性伸縮性が得られる。図61aと比較すると、4次フラクタル相互接続(図62a)は、追加の範囲の歪み硬化(1500%<ε印加<2300%)を示し、その歪み硬化の3つの範囲は、それぞれ4次、3次、及び2次構造のラベリング(の終わり)に該当する(図62b)。弾性伸縮性2140%には、最後の歪み硬化事象(2次構造のラベリングに該当する。)中に到達する。フラクタル相互接続の規則正しいラベリングは、最大主歪みの増加速度を著しく遅延させることが明らかであり、したがって大きい弾性伸縮性が可能になる。
[0378]このレベルの相互接続伸縮性(2140%)は、方程式(1)に基づいて、能動デバイスの約90%の充填比の場合にシステムの110%の弾性伸縮性に換算され、98%の充填比の場合には22%に換算されることを指摘すべきであり、これらの値はバイオ医薬の適用例で十分なものである。
5.一般化フラクタル相互接続
[0379]上記にて論じたフラクタル相互接続は、各次数で相互接続がそれ自体の高さ/間隔のアスペクト比η
(i)及び単位セル数m
(i)(i=1、2、...n)を有することができるように、一般化することができる。一般化フラクタル相互接続は、Xuら(2013)で実証されたように、大きい弾性伸縮性及び比較的低い電気抵抗を同時に提供してもよい。n次一般化フラクタル相互接続の場合、幾何学的反応(2)は、
になる。
[0380]セクション3で紹介されたHCMは、一般化フラクタル相互接続の座屈後を研究するために、容易に拡張することができる。図63は、伸縮性バッテリの実験(Xuら、2013)における一般化2次フラクタル相互接続を示す。図63の上部(ε=0%)に示される相互接続は、導電性銅層(厚さ0.6μm)を挟む2つのポリイミド(PI)層(共に、厚さ1.2μm、EPI=2.5GPa、及びVPI=0.34)から構成される。金属トレースは、2つの剛性の円形の島によって接続され、全構造の伸長中はほとんど変形しない。
[0381]図63は、2つの異なる座屈モード、即ち対称及び非対称モードに関して、実験から得た光学画像と、フラクタル相互接続の変形構成に関してHCMにより得られた結果とを比較する。HCMと実験との間での良好な一致が、両方のモードに関して伸長の全範囲(0%〜300%)にわたり観察される。HCMによって得られた金属層における最大歪みは、従来のFEAによって得られた場合に十分一致する(図64)が、前者は非常に速く、より高いフラクタル次数に適用可能である。実験(図63)及び従来のFEA(図64)は、HCMを明確に検証する。
6.結論及び考察
[0382]規則正しいラベリングのメカニズムに基づくフラクタル相互接続の座屈後解析に関する階層計算モデルを、この実施例で開発する。この手法は、実験及びFEAの両方によって検証されたように、従来のFEAに比べて計算の労力及びコストを実質的に削減するが、正確な予測がなされる。デザインは、フラクタル次数が1から4に増加するにつれ、弾性伸縮性が大きく増強される(約200倍)。HCMは、ペアノ及びヒルベルト曲線(Sagan、1994)など、交点なしに形成された多くのその他のタイプのフラクタルレイアウトにも適用可能である。これは、伸縮性光起電力装置(Yoonら、2008)などの能動デバイスの大きい面積カバレッジと、電子眼球カメラ(Koら、2008)とを同時に必要とする伸縮性エレクトロニクスの開発に有用である。フラクタル相互接続の概念は、伸縮性をさらに増強させるため、軟質基板の予歪状態など(Leeら、2011b;Zhangら、2013b)、伸縮性に関するその他の戦略とさらに組み合わせることができる。
[0383]規則正しいラベリングのプロセスは、フラクタル次数を持つ相互接続の全長の単純な増大をはるかに超える、高次フラクタル相互接続の高い弾性伸縮性において、極めて重要な役割を演ずることを指摘すべきである。例えば、図65における1次及び2次フラクタル相互接続は、同じ全長及び断面(幅及び厚さ)と、デバイス島の間に同じ間隔を有し、それでも2次相互接続は、弾性伸縮性において、1次相互接続よりもほぼ2倍(528%対284%)優れている(Xuら、2013)。
補遺。n次フラクタル相互接続の有効可撓性
[0384]左端がクランプ留めされ且つ右端が力(N、Q
y、Q
z)及び屈曲モーメント(M
x、M
y、M
z)に供される1次フラクタル相互接続の場合、全相互接続の歪みエネルギーは、全ての直線及び湾曲部分の屈曲エネルギーの合計から得ることができる(Zhangら、2013a)。1次相互接続の可撓性マトリックス
及び
は、方程式(4a)及び(4b)で与えられるように、力の成分(又は屈曲モーメント)に関して、歪みエネルギー関数の2次導関数から得ることができる。
[0385]2次フラクタル相互接続は、垂直に位置合わせされた1次相互接続及び水平に位置合わせされた直線ビームから構成される。その歪みエネルギーは、全ての1次相互接続及び直線ビームにおける歪みエネルギーの合計であり、それに対して1次相互接続の歪みエネルギーは、その可撓性マトリックス、
及び
を使用して得ることができる。一方、2次フラクタル相互接続の歪みエネルギーは、
及び
に関して得ることができる。このエネルギーの均等性により、方程式(5a)及び(5b)における
及び
の解析式が得られ、構成要素
は、
によって得られる。
[0386]n次相互接続は、垂直に位置合わせされた(n−1)次相互接続と、水平に位置合わせされた(n−2)次相互接続とから構成される。n次相互接続の歪みエネルギーの均等性と、全ての(n−1)次及び(n−2)次相互接続における歪みエネルギーの合計から得られた均等性とに基づいて、
及び
が、(n−1)及び(n−2)次に関する可撓性マトリックスを介した下記の再帰式で得られ:
式中、
である。
参考文献
[0387] Cotton, D. P. J., Graz, I.M., and Lacour, S. P., 2009. A Multifunctional Capacitive Sensor forStretchable Electronic Skins. IEEE Sensors Journal 9, 2008-2009.
[0388] Duan, Y. Q., Huang, Y. A.,Yin, Z. P., Bu, N. B., and Dong, W. T., 2014. Non-wrinkled, highly stretchablepiezoelectric devices by electrohydrodynamic direct-writing. NanoscaleIn Press, doi: 10.1039/C3NR06007A.
[0389] Gao, H. J., Wang, X., Yao, H.M., Gorb, S., and Arzt, E., 2005. Mechanics of hierarchical adhesion structuresof geckos. Mechanics of Materials 37, 275-285.
[0390] Gonzalez, M., Axisa, F.,BuIcke, M. V., Brosteaux, D., Vandevelde, B., and Vanfleteren, J., 2008. Designof metal interconnects for stretchable electronic circuits. MicroelectronicsReliability 48, 825-832.
[0391] Graudejus, O., Morrison, B.,Goletiani, C., Yu, Z., and Wagner, S., 2012. Encapsulating ElasticallyStretchable Neural Interfaces: Yield, Resolution, and Recording/Stimulation ofNeural Activity. Advanced Functional Materials 22, 640-651.
[0392] Hsu, Y. Y., Gonzalez, M.,Bossuyt, F., Axisa, F., Vanfleteren, J., and De Wolf, I., 2009. In situobservations on deformation behavior and stretching-induced failure of finepitch stretchable interconnect. Journal of Materials Research 24,3573-3582.
[0393] Huang, Y. A., Wang, X. M.,Duan, Y. Q., Bu, N. B., and Yin, Z. P., 2012. Controllable self-organization ofcolloid microarrays based on finite length effects of electrospun ribbons. SoftMatter 8, 8302-8311.
[0394] Jiang, H. Q., Khang, D. Y.,Fei, H. Y., Kim, H., Huang, Y. G., Xiao, J. L., and Rogers, J. A., 2008. Finitewidth effect of thin-films buckling on compliant substrate: Experimental andtheoretical studies. Journal of the Mechanics and Physics of Solids 56,2585-2598.
[0395] Jiang, H. Q., Khang, D. Y.,Song, J. Z., Sun, Y. G., Huang, Y. G., and Rogers, J. A., 2007. Finitedeformation mechanics in buckled thin films on compliant supports. Proceedingsof the National Academy of Sciences of the United States of America 104,15607-15612.
[0396] Jones, J., Lacour, S. P.,Wagner, S., and Suo, Z. G., 2004. Stretchable wavy metal interconnects. Journalof Vacuum Science & Technology A 22, 1723-1725.
[0397] Kaltenbrunner, M., Sekitani,T., Reeder, J., Yokota, T., Kuribara, K., Tokuhara, T., Drack, M., Schwodiauer,R., Graz, I., Bauer-Gogonea, S., Bauer, S., and Someya, T., 2013. Anultra-lightweight design for imperceptible plastic electronics. Nature 499,458-463.
[0398] Khang, D. Y., Jiang, H. Q.,Huang, Y., and Rogers, J. A., 2006. A stretchable form of single-crystalsilicon for high-performance electronics on rubber substrates. Science 311,208-212.
[0399] Kim, D. H., Ghaffari, R., Lu,N. S., Wang, S. D., Lee, S. P., Keum, H., D'Angelo, R., Klinker, L., Su, Y. W.,Lu, C. F., Kim, Y. S., Ameen, A., Li, Y. H., Zhang, Y. H., de Graff, B., Hsu,Y. Y., Liu, Z. J., Ruskin, J., Xu, L. Z., Lu, C., Omenetto, F. G., Huang, Y.G., Mansour, M., Slepian, M. J., and Rogers, J. A., 2012a. Electronic sensorand actuator webs for large-area complex geometry cardiac mapping and therapy. Proceedingsof the National Academy of Sciences of the United States of America 109,19910-19915.
[0400] Kim, D. H., Liu, Z. J., Kim,Y. S., Wu, J., Song, J. Z., Kim, H. S., Huang, Y. G., Hwang, K. C., Zhang, Y.W., and Rogers, J. A., 2009. Optimized Structural Designs for StretchableSilicon Integrated Circuits. Small 5, 2841-2847.
[0401] Kim, D. H., Lu, N. S.,Ghaffari, R., Kim, Y. S., Lee, S. P., Xu, L. Z., Wu, J. A., Kim, R. H., Song,J. Z., Liu, Z. J., Viventi, J., de Graff, B., Elolampi, B., Mansour, M.,Slepian, M. J., Hwang, S., Moss, J. D., Won, S. M., Huang, Y. G., Litt, B., andRogers, J. A., 2011a. Materials for multifunctional balloon catheters withcapabilities in cardiac electrophysiological mapping and ablation therapy. NatureMaterials 10, 316-323.
[0402] Kim, D. H., Lu, N. S., Ma,R., Kim, Y. S., Kim, R. H., Wang, S. D., Wu, J., Won, S. M., Tao, H., Islam,A., Yu, K. J., Kim, T. I., Chowdhury, R., Ying, M., Xu, L. Z., Li, M., Chung,H. J., Keum, H., McCormick, M., Liu, P., Zhang, Y. W., Omenetto, F. G., Huang,Y. G., Coleman, T., and Rogers, J. A., 2011b. Epidermal Electronics. Science333, 838-843.
[0403] Kim, D. H., Song, J. Z.,Choi, W. M., Kim, H. S., Kim, R. H., Liu, Z. J., Huang, Y. Y., Hwang, K. C.,Zhang, Y. W., and Rogers, J. A., 2008. Materials and noncoplanar mesh designsfor integrated circuits with linear elastic responses to extreme mechanicaldeformations. Proceedings of the National Academy of Sciences of the UnitedStates of America 105, 18675-18680.
[0404] Kim, D. H., Wang, S. D.,Keum, H., Ghaffari, R., Kim, Y. S., Tao, H., Panilaitis, B., Li, M., Kang, Z.,Omenetto, F., Huang, Y. G., and Rogers, J. A., 2012b. Thin, Flexible Sensorsand Actuators as 'Instrumented' Surgical Sutures for Targeted Wound Monitoringand Therapy. Small 8, 3263-3268.
[0405] Kim, R. H., Kim, D. H., Xiao,J. L., Kim, B. H., Park, S. I., Panilaitis, B., Ghaffari, R., Yao, J. M., Li,M., Liu, Z. J., Malyarchuk, V., Kim, D. G., Le, A. P., Nuzzo, R. G., Kaplan, D.L., Omenetto, F. G., Huang, Y. G., Kang, Z., and Rogers, J. A., 2010.Waterproof AlInGaP optoelectronics on stretchable substrates with applicationsin biomedicine and robotics. Nature Materials 9, 929-937.
[0406] Kim, R. H., Tao, H., Kim, T.I., Zhang, Y. H., Kim, S., Panilaitis, B., Yang, M. M., Kim, D. H., Jung, Y.H., Kim, B. H., Li, Y. H., Huang, Y. G., Omenetto, F. G., and Rogers, J. A.,2012c. Materials and Designs for Wirelessly Powered Implantable Light-EmittingSystems. Small 8, 2812-2818.
[0407] Ko, H. C., Stoykovich, M. P.,Song, J. Z., Malyarchuk, V., Choi, W. M., Yu, C. J., Geddes, J. B., Xiao, J.L., Wang, S. D., Huang, Y. G., and Rogers, J. A., 2008. A hemisphericalelectronic eye camera based on compressible silicon optoelectronics. Nature454, 748-753.
[0408] Lacour, S. P., Jones, J.,Wagner, S., Li, T., and Suo, Z. G., 2005. Stretchable interconnects for elasticelectronic surfaces. Proceedings of the IEEE 93, 1459-1467.
[0409] Lacour, S. P., Wagner, S.,Narayan, R. J., Li, T., and Suo, Z. G., 2006. Stiff subcircuit islands ofdiamondlike carbon for stretchable electronics. Journal of Applied Physics100, 014913.
[0410] Lee, C. H., Kim, Y. J., Hong,Y. J., Jeon, S. R., Bae, S., Hong, B. H., and Yi, G. C., 2011a. FlexibleInorganic Nanostructure Light-Emitting Diodes Fabricated on Graphene Films. AdvancedMaterials 23, 4614-4619.
[0411] Lee, J., Wu, J. A., Shi, M.X., Yoon, J., Park, S. I., Li, M., Liu, Z. J., Huang, Y. G., and Rogers, J. A.,2011b. Stretchable GaAs Photovoltaics with Designs That Enable High ArealCoverage. Advanced Materials 23, 986-991.
[0412] Li, T., Suo, Z. G., Lacour,S. P., and Wagner, S., 2005. Compliant thin film patterns of stiff materials asplatforms for stretchable electronics. Journal of Materials Research 20,3274-3277.
[0413] Li, Y., Ortiz, C., and Boyce,M. C., 2012. Bioinspired, mechanical, deterministic fractal model forhierarchical suture joints. Physical Review E 85,
[0414] Li, Y., Ortiz, C., and Boyce,M. C., 2013. A generalized mechanical model for suture interfaces of arbitrarygeometry. Journal of the Mechanics and Physics of Solids 61,1144-1167.
[0415] Lipomi, D. J., Tee, B. C. K.,Vosgueritchian, M., and Bao, Z. N., 2011. Stretchable Organic Solar Cells. AdvancedMaterials 23, 1771-1775.
[0416] Lu, N. S., Lu, C., Yang, S.X., and Rogers, J., 2012. Highly Sensitive Skin-Mountable Strain Gauges BasedEntirely on Elastomers. Advanced Functional Materials 22,4044-4050.
[0417] Mannsfeld, S. C. B., Tee, B.C. K., Stoltenberg, R. M., Chen, C., Barman, S., Muir, B. V. O., Sokolov, A.N., Reese, C., and Bao, Z. N., 2010. Highly sensitive flexible pressure sensorswith microstructured rubber dielectric layers. Nature Materials 9,859-864.
[0418] Nelson, E. C., Dias, N. L.,Bassett, K. P., Dunham, S. N., Verma, V., Miyake, M., Wiltzius, P., Rogers, J.A., Coleman, J. J., Li, X. L., and Braun, P. V., 2011. Epitaxial growth ofthree-dimensionally architectured optoelectronic devices. Nature Materials10, 676-681.
[0419] Rogers, J. A., Someya, T.,and Huang, Y. G., 2010. Materials and Mechanics for Stretchable Electronics. Science327, 1603-1607.
[0420] Sagan, H. Space-fillingcurves. New York: Springer-Verlag, 1994.
[0421] Schwartz, G., Tee, B. C. K.,Mei, J. G., Appleton, A. L., Kim, D. H., Wang, H. L., and Bao, Z. N., 2013.Flexible polymer transistors with high pressure sensitivity for application inelectronic skin and health monitoring. Nature Communications 4,1859.
[0422] Sekitani, T., Nakajima, H., Maeda,H., Fukushima, T., Aida, T., Hata, K., and Someya, T., 2009. Stretchableactive-matrix organic light-emitting diode display using printable elasticconductors. Nature Materials 8, 494-499.
[0423] Someya, T., Sekitani, T.,Iba, S., Kato, Y., Kawaguchi, H., and Sakurai, T., 2004. A large-area, flexiblepressure sensor matrix with organic field-effect transistors for artificialskin applications. Proceedings of the National Academy of Sciences of theUnited States of America 101, 9966-9970.
[0424] Song, J., Huang, Y., Xiao,J., Wang, S., Hwang, K. C., Ko, H. C., Kim, D. H., Stoykovich, M. P., andRogers, J. A., 2009. Mechanics of noncoplanar mesh design for stretchableelectronic circuits. Journal of Applied Physics 105, 123516.
[0425] Song, Y. M., Xie, Y. Z.,Malyarchuk, V., Xiao, J. L., Jung, I., Choi, K. J., Liu, Z. J., Park, H., Lu,C. F., Kim, R. H., Li, R., Crozier, K. B., Huang, Y. G., and Rogers, J. A.,2013. Digital cameras with designs inspired by the arthropod eye. Nature497, 95-99.
[0426] Viventi, J., Kim, D. H.,Moss, J. D., Kim, Y. S., Blanco, J. A., Annetta, N., Hicks, A., Xiao, J. L.,Huang, Y. G., Callans, D. J., Rogers, J. A., and Litt, B., 2010. A Conformal,Bio-Interfaced Class of Silicon Electronics for Mapping CardiacElectrophysiology. Science Translational Medicine 2, 24ra22.
[0427] Wagner, S., Lacour, S. P.,Jones, J., Hsu, P. H. I., Sturm, J. C., Li, T., and Suo, Z. G., 2004.Electronic skin: architecture and components. Physica E-Low-DimensionalSystems & Nanostructures 25, 326-334.
[0428] Webb, R. C., Bonifas, A. P.,Behnaz, A., Zhang, Y. H., Yu, K. J., Cheng, H. Y., Shi, M. X., Bian, Z. G.,Liu, Z. J., Kim, Y. S., Yeo, W. H., Park, J. S., Song, J. Z., Li, Y. H., Huang,Y. G., Gorbach, A. M., and Rogers, J. A., 2013. Ultrathin conformal devices forprecise and continuous thermal characterization of human skin. NatureMaterials 12, 938-944.
[0429] William, F. R., Leroy, D. S.,and Don, H. M. Mechanics of Materials. New York: Jon Wiley & Sons, 1999.
[0430] Xu, S., Zhang, Y. H., Cho,J., Lee, J., Huang, X., Jia, L., Fan, J. A., Su, Y. W., Su, J., Zhang, H. G.,Cheng, H. Y., Lu, B. W., Yu, C. J., Chuang, C., Kim, T. I., Song, T., Shigeta,K., Kang, S., Dagdeviren, C., Petrov, I., Braun, P. V., Huang, Y., Paik, U.,and Rogers, J. A., 2013. Stretchable batteries with self-similar serpentineinterconnects and integrated wireless recharging systems. NatureCommunications 4, 1543.
[0431] Yang, S. X., and Lu, N. S.,2013. Gauge Factor and Stretchability of Silicon-on-Polymer Strain Gauges. Sensors13, 8577-8594.
[0432] Yao, H., and Gao, H., 2006.Mechanics of robust and releasable adhesion in biology: Bottom-up designedhierarchical structures of gecko. Journal of the Mechanics and Physics ofSolids 54, 1120-1146.
[0433] Yao, H., and Gao, H., 2007.Multi-scale cohesive laws in hierarchical materials. International Journalof Solids and Structures 44, 8177-8193.
[0434] Ying, M., Bonifas, A. P., Lu,N. S., Su, Y. W., Li, R., Cheng, H. Y., Ameen, A., Huang, Y. G., and Rogers, J.A., 2012. Silicon nanomembranes for fingertip electronics. Nanotechnology23, 344004.
[0435] Yoon, J., Baca, A. J., Park,S. I., Elvikis, P., Geddes, J. B., Li, L. F., Kim, R. H., Xiao, J. L., Wang, S.D., Kim, T. H., Motala, M. J., Ahn, B. Y., Duoss, E. B., Lewis, J. A., Nuzzo,R. G., Ferreira, P. M., Huang, Y. G., Rockett, A., and Rogers, J. A., 2008.Ultrathin silicon solar microcells for semitransparent, mechanically flexibleand microconcentrator module designs. Nature Materials 7,907-915.
[0436] Yu, Z., Graudejus, O., Tsay,C., Lacour, S. P., Wagner, S., and Morrison, B., 2009. Monitoring HippocampusElectrical Activity In Vitro on an Elastically Deformable Microelectrode Array.Journal of Neurotrauma 26, 1135-1145.
[0437] Zhang, Y. H., Fu, H. R., Su,Y. W., Xu, S., Cheng, H. Y., Fan, J. A., Hwang, K. C., Rogers, J. A., andHuang, Y., 2013a. Mechanics of ultra-stretchable self-similar serpentineinterconnects. Acta Materialia 61, 7816-7827.
[0438] Zhang, Y. H., Wang, S. D.,Li, X. T., Fan, J. A., Xu, S., Song, Y. M., Choi, K. J., Yeo, W. H., Lee, W.,Nazaar, S. N., Lu, B. W., Yin, L., Hwang, K. C., Rogers, J. A., and Huang, Y.,2013b. Experimental and Theoretical Studies of Serpentine MicrostructuresBonded To Prestrained Elastomers for Stretchable Electronics. AdvancedFunctional Materials In Press, doi: 10.1002/adfm.201302957.
[0439] Zhang, Y. H., Xu, S., Fu, H.R., Lee, J., Su, J., Hwang, K. C., Rogers, J. A., and Huang, Y., 2013c.Buckling in serpentine microstructures and applications in elastomer-supportedultra-stretchable electronics with high areal coverage. Soft Matter 9, 8062-8070.
[0440] Zhang, Z., Zhang, T., Zhang, Y.W., Kim, K.-S., and Gao, H., 2012. Strain-ControlledSwitching of Hierarchically Wrinkled Surfaces between Superhydrophobicity andSuperhydrophilicity. Langmuir 28, 2753-2760.
[0441] Zhang, Z., Zhang, Y.-W., andGao, H., 2011. On optimal hierarchy of load-bearing biological materials. Proceedingsof the Royal Society B-Biological Sciences 278, 519-525.
参照による組込み及び変形例の記載
[0442]本出願全体を通した全ての参考文献、例えば発行された又は付与された特許又は均等物を含む特許文書;特許出願公開;及び非特許文献文書又はその他の出典資料は、あたかも参照により個々に組み込まれるように、各参考文献が少なくとも部分的に本出願の開示と矛盾しなくなる程度まで、参照によりその全体が本明細書に組み込まれる(例えば、部分的に矛盾している参考文献は、参考文献の部分的に矛盾している部分を除き、参照により組み込まれる。)。
[0443]本明細書で用いられてきた用語及び表現は、記述する用語として且つ限定することなく使用され、そのような用語及び表現の使用において、図示され記述される特徴又はその部分のいかなる均等物も排除するものではなく、特許請求の範囲に記載される本発明の範囲内で様々な修正が可能であることが理解される。したがって、本発明を好ましい実施形態、例示的な実施形態、及び任意選択の特徴により特に開示してきたが、本明細書に開示された概念の修正例及び変形例を当業者が利用することができ、そのような修正例及び変形例は、添付される特許請求の範囲により定義されるように本発明の範囲内にあると見なされることを理解すべきである。本明細書で提供された特定の実施形態は、本発明の有用な実施形態の例であり、本発明は、本発明の記述で述べたデバイス、デバイス構成要素、方法ステップの多数の変形例を使用して実施できることが当業者に理解されよう。当業者に明らかにされるように、本発明の方法で有用な方法及びデバイスは、多数の任意選択の組成物と加工要素及びステップを含むことができる。
[0444]置換基の群が本明細書に開示される場合、その群の全ての個々のメンバ及び全てのサブグループであって、群のメンバの任意の異性体、鏡像異性体、及びジアステレオマーを含めたものが、個々に開示されることが理解される。マーカッシュ群又はその他のグループ分けを本明細書で使用する場合、この群の全ての個々のメンバと、この群の可能性ある全ての組合せ及び部分組合せは、本開示に個々に含まれるものとする。化合物の特定の異性体、鏡像異性体、又はジアステレオマーが例えば式において又は化学名において特定されないように、化合物が本明細書で記述される場合、その記述は、個々に又は任意の組合せで記述された化合物の各異性体及び鏡像異性体を含むものとする。さらに、他に指示しない限り、本明細書に記述される化合物の全ての同位体変種は、本開示により包含されるものとする。例えば、開示される分子中のいずれか1つ又は複数の水素は、重水素又はトリチウムで置き換えることができることが理解されよう。分子の同位体変種は、分子用のアッセイにおいて、且つ分子又はその使用に関係した化学的及び生物学的研究において、標準として一般に有用である。そのような同位体変種を作製するための方法は、当技術分野で公知である。化合物の特定の名称は、当業者が同じ化合物を異ならせて呼ぶことができることが公知である場合、例示的なものであるとする。
[0445]本明細書に開示された分子の多くは、1つ又は複数のイオン化可能な基を含有する[そこからプロトンを除去することができる基(例えば、−COOH)若しくは付加することができる基(例えば、アミン)、又は4級化することができる基(例えば、アミン)]。そのような分子の全ての可能性あるイオン形態及びそれらの塩は、本明細書の開示に個々に含まれるものとする。本明細書の化合物の塩に関し、当業者は、所与の適用例に関する本明細書の塩の調製に適切な、広く様々な利用可能な対イオンの中から選択することができる。特定の適用例において、塩を調製するための所与のアニオン又はカチオンの選択は、塩の高い又は低い溶解性をもたらしてもよい。
[0446]本明細書に記述され又は例示される構成要素の全ての配合物又は組合せは、他に指示しない限り本発明を実施するのに使用することができる。
[0447]本明細書で使用され且つ添付される特許請求の範囲で使用されるとき、単数形「a」、「an」、及び「the」は、文脈が他に明らかに指示しない限り、複数形を含むことに留意されたい。したがって、例えば、「セル」と言った場合は当業者に公知の複数のそのようなセル及びそれらの均等物、及び同様のものが含まれる。同様に、「a」(又は「an」)、「1つ又は複数」、及び「少なくとも1つ」という用語は、本明細書では同義に使用することができる。「含む(comprising)」、「含む(including)」、及び「有する」という用語を同義に使用できることにも留意されたい。「請求項XX〜YYのいずれかの」という表現(XX及びYYは、請求項の番号を指す。)は、代替形態で多数の従属クレームを提示するものとし、いくつかの実施形態では、「請求項XX〜YYのいずれか一項」という表現と同義である。
[0448]範囲、例えば温度範囲、時間範囲、又は組成物若しくは濃度範囲が本明細書で与えられた場合はいつでも、全ての中間範囲及び部分範囲、並びにその範囲に含まれる全ての個々の値が、本開示に含まれるものとする。本明細書で使用される範囲は、特に、範囲の端点の値として提供された値を含む。例えば、範囲1〜100は、1〜100の端点の値を特に含む。本明細書の記述に含まれる範囲又は部分範囲の、任意の部分範囲又は個々の値は、本明細書の特許請求の範囲から排除できることが理解されよう。
[0449]本明細書で述べた全ての特許及び刊行物は、本発明が関係する当業者のレベルを示す。本明細書で引用された参考文献は、それらの公開又は出願日の時点における現況技術を示すために、その全体が本明細書に参照により組み込まれ、この情報は、従来技術にある特定の実施形態を排除するために、必要に応じて本明細書で用いることができるものとする。例えば、物質の組成物が特許請求の範囲に記載される場合、出願人の発明の前に当技術分野で公知であり且つ利用可能な化合物は、有効な開示が本明細書で引用された参考文献に提示されている化合物も含めて、本明細書の物質の組成物のクレームに含まれるものではないことを理解すべきである。
[0450]本明細書で使用される「含む(comprising)」は、「含む(including)」、「含有する」、又は「〜によって特徴付けられる」と同義であり、包括的又は非制限的であり、追加の引用されていない要素又は方法ステップを除外しない。本明細書で使用される「〜からなる」は、特許請求の範囲の要素に指定されていない任意の要素、ステップ、又は成分を除外する。本明細書で使用される「〜から本質的になる」は、特許請求の範囲の基本的及び新規な特徴に実質的に影響を及ぼさない材料又はステップを除外しない。本明細書の各場合において、「含む(comprising)」、「〜から本質的になる」、及び「〜からなる」という用語のいずれかは、他の2つの用語のいずれかによって置き換えられてもよい。本明細書で例示的に記述された本発明は、本明細書で特に開示されていない任意の要素又は複数の要素、1つ又は複数の制限が存在しない状態で、適切に実施することができる。
[0451]当業者なら、特に例示されたもの以外の出発材料、生物材料、試薬、合成方法、精製方法、解析方法、アッセイ方法、及び生物学的方法を、過度な実験に頼ることなく本発明の実施の際に用いることができることが理解されよう。任意のそのような材料及び方法の、全ての当技術分野で公知の機能的均等物は、本発明に含まれるものとする。用いられてきた用語及び表現は、記述する用語として且つ限定することなく使用され、そのような用語及び表現の使用において、図示され記述される特徴又はその部分のいかなる均等物も排除するものではなく、特許請求の範囲に記載される本発明の範囲内で様々な修正が可能であることが理解される。したがって、本発明を好ましい実施形態及び任意選択の特徴により特に開示してきたが、本明細書に開示された概念の修正例及び変形例を当業者が利用することができ、そのような修正例及び変形例は、添付される特許請求の範囲により定義されるように本発明の範囲内にあると見なされることを理解すべきである。