JP2016177148A - 画像生成手段移動装置および画像投影装置 - Google Patents
画像生成手段移動装置および画像投影装置 Download PDFInfo
- Publication number
- JP2016177148A JP2016177148A JP2015057514A JP2015057514A JP2016177148A JP 2016177148 A JP2016177148 A JP 2016177148A JP 2015057514 A JP2015057514 A JP 2015057514A JP 2015057514 A JP2015057514 A JP 2015057514A JP 2016177148 A JP2016177148 A JP 2016177148A
- Authority
- JP
- Japan
- Prior art keywords
- image
- unit
- movable
- projection
- dmd
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





















Landscapes
- Projection Apparatus (AREA)
- Transforming Electric Information Into Light Information (AREA)
Abstract
【課題】精度よく画像生成手段を所定の周期で往復移動させることができる画像生成手段移動装置および画像投影装置を提供する。
【解決手段】画像表示ユニットなどの画像生成手段移動装置は、プロジェクタなどの画像投影装置に設けられ、光源から照射される光を用いて画像を生成するDMDなどの画像生成手段を保持し、移動可能に構成された可動ユニットなどの可動保持手段を有している。また、可動保持手段を移動させる駆動手段(コイルと磁石などで構成)と駆動手段を制御する移動制御部などの移動制御手段も有している。そして、画像投影装置の設置姿勢を検知する検知手段(本実施形態では、移動制御部12などで構成)を備え、移動制御手段は、検知手段の検知結果に基づいて、可動保持手段の駆動条件を設定する。
【選択図】図23
【解決手段】画像表示ユニットなどの画像生成手段移動装置は、プロジェクタなどの画像投影装置に設けられ、光源から照射される光を用いて画像を生成するDMDなどの画像生成手段を保持し、移動可能に構成された可動ユニットなどの可動保持手段を有している。また、可動保持手段を移動させる駆動手段(コイルと磁石などで構成)と駆動手段を制御する移動制御部などの移動制御手段も有している。そして、画像投影装置の設置姿勢を検知する検知手段(本実施形態では、移動制御部12などで構成)を備え、移動制御手段は、検知手段の検知結果に基づいて、可動保持手段の駆動条件を設定する。
【選択図】図23
Description
本発明は、画像生成手段移動装置および画像投影装置に関するものである。
パソコンやデジタルカメラ等から送信される画像データに基づいて、光源から照射される光を用いて画像生成手段が画像を生成し、生成された画像を複数のレンズ等を含む光学系を通してスクリーン等に画像を投影する画像投影装置が知られている。画像生成手段としては、例えば液晶パネルやデジタルマイクロミラーデバイスDMD(Digital Micromirror Device)等が用いられている。
特許文献1には、投影光学系に偏芯させた2つの偏芯レンズを設け、2つの偏芯レンズを相対的に光軸と垂直な方向に往復移動させて投影面上の画像をシフトさせることで、投影画像を高解像度化する画像投影装置が提案されている。
本出願人は、特許文献1とは異なる手法で、投影面上の画像をシフトさせて、投影画像を高解像度化する画像投影装置を開発中である。具体的には、画像生成手段を移動させる画像生成手段移動装置を設け、画像生成手段を所定の周期で往復移動させて投影画像を高解像度化する手法である。画像投影装置は、床上や机上に設置する通常設置以外に、ユーザーのニーズ合わせて様々な姿勢で設置される。その結果、画像投影装置の設置姿勢により、重力の影響が互いに異なる。そのため、画像投影装置の設置姿勢によっては、重力の影響によって、精度よく画像生成手段を所定の周期で往復移動させることができない場合があるという課題があった。
上記課題を解決するために、本発明は、画像生成手段移動装置において、画像投影装置に設けられ、光源から照射される光を用いて画像を生成する画像生成手段を保持し、移動可能に構成された可動保持手段と、前記可動保持手段を移動させる駆動手段と、前記駆動手段を制御する移動制御手段と、前記画像投影装置の設置姿勢を検知する検知手段とを備え、前記移動制御手段は、前記検知手段の検知結果に基づいて、前記駆動手段の駆動条件を設定することを特徴とするものである。
本発明によれば、精度よく画像生成手段を所定の周期で往復移動させることができる。
以下、図面を参照して発明を実施するための形態について説明する。各図面において、同一構成部分には同一符号を付し、重複した説明を省略する場合がある。
<画像投影装置の構成>
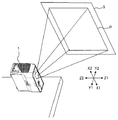
図1は、実施形態におけるプロジェクタ1を例示する図である。
図1は、実施形態におけるプロジェクタ1を例示する図である。
プロジェクタ1は、画像投影装置の一例であり、出射窓3、外部I/F9を有し、投影画像を生成する光学エンジンが内部に設けられている。プロジェクタ1は、例えば外部I/F9に接続されるパソコンやデジタルカメラから画像データが送信されると、光学エンジンが送信された画像データに基づいて投影画像を生成し、図1に示されるように出射窓3からスクリーンSに画像を投影する。
なお、以下に示す図面において、X1X2方向はプロジェクタ1の幅方向、Y1Y2方向はプロジェクタ1の奥行き方向、Z1Z2方向はプロジェクタ1の高さ方向である。また、以下では、プロジェクタ1の出射窓3側を上、出射窓3とは反対側を下として説明する場合がある。
図2は、実施形態におけるプロジェクタ1の機能構成を例示するブロック図である。
図2に示されるように、プロジェクタ1は、電源4、メインスイッチSW5、操作部7、外部I/F9、システムコントロール部10、ファン20、光学エンジン15を有する。
電源4は、商用電源に接続され、プロジェクタ1の内部回路用に電圧及び周波数を変換して、システムコントロール部10、ファン20、光学エンジン15等に給電する。
メインスイッチSW5は、ユーザによるプロジェクタ1のON/OFF操作に用いられる。電源4が電源コード等を介して商用電源に接続された状態で、メインスイッチSW5がONに操作されると、電源4がプロジェクタ1の各部への給電を開始し、メインスイッチSW5がOFFに操作されると、電源4がプロジェクタ1の各部への給電を停止する。
操作部7は、ユーザによる各種操作を受け付けるボタン等であり、例えばプロジェクタ1の上面に設けられている。操作部7は、例えば投影画像の大きさ、色調、ピント調整等のユーザによる操作を受け付ける。操作部7が受け付けたユーザ操作は、システムコントロール部10に送られる。
外部I/F9は、例えばパソコン、デジタルカメラ等に接続される接続端子を有し、接続された機器から送信される画像データをシステムコントロール部10に出力する。
システムコントロール部10は、画像制御部11、移動制御部12を有する。システムコントロール部10は、例えばCPU,ROM,RAM等を含み、CPUがRAMと協働してROMに記憶されているプログラムを実行することで、各部の機能が実現される。
画像制御部11は、画像制御手段の一例であり、外部I/F9から入力される画像データに基づいて光学エンジン15の画像表示ユニット50に設けられているデジタルマイクロミラーデバイスDMD(Digital Micromirror Device(以下、単に「DMD」という))551を制御し、スクリーンSに投影する画像を生成する。
移動制御部12は、移動制御手段の一例であり、画像表示ユニット50において移動可能に設けられている可動ユニット55を移動させ、可動ユニット55に設けられているDMD551の位置を制御する。
ファン20は、システムコントロール部10に制御されて回転し、光学エンジン15の光源30を冷却する。
光学エンジン15は、光源30、照明光学系ユニット40、画像表示ユニット50、投影光学系ユニット60を有し、システムコントロール部10に制御されてスクリーンSに画像を投影する。
光源30は、例えば水銀高圧ランプ、キセノンランプ、LED等であり、システムコントロール部10により制御され、照明光学系ユニット40に光を照射する。
照明光学系ユニット40は、例えばカラーホイール、ライトトンネル、リレーレンズ等を有し、光源30から照射された光を画像表示ユニット50に設けられているDMD551に導く。
画像表示ユニット50は、固定支持されている固定ユニット51、固定ユニット51に対して移動可能に設けられている可動ユニット55を有する。可動ユニット55は、DMD551を有し、システムコントロール部10の移動制御部12によって固定ユニット51に対する位置が制御される。DMD551は、画像生成手段の一例であり、システムコントロール部10の画像制御部11により制御され、照明光学系ユニット40によって導かれた光を変調して投影画像を生成する。
投影光学系ユニット60は、例えば複数の投影レンズ、ミラー等を有し、画像表示ユニット50のDMD551によって生成される画像を拡大してスクリーンSに投影する。
<光学エンジンの構成>
次に、プロジェクタ1の光学エンジン15の各部の構成について説明する。
次に、プロジェクタ1の光学エンジン15の各部の構成について説明する。
図3は、実施形態における光学エンジン15を例示する斜視図である。光学エンジン15は、図3に示されるように、光源30、照明光学系ユニット40、画像表示ユニット50、投影光学系ユニット60を有し、プロジェクタ1の内部に設けられている。
光源30は、照明光学系ユニット40の側面に設けられ、X2方向に光を照射する。照明光学系ユニット40は、光源30から照射された光を、下部に設けられている画像表示ユニット50に導く。画像表示ユニット50は、照明光学系ユニット40によって導かれた光を用いて投影画像を生成する。投影光学系ユニット60は、照明光学系ユニット40の上部に設けられ、画像表示ユニット50によって生成された投影画像をプロジェクタ1の外部に投影する。
なお、本実施形態に係る光学エンジン15は、光源30から照射される光を用いて上方に画像を投影するように構成されているが、水平方向に画像を投影するような構成であってもよい。
[照明光学系ユニット]
図4は、実施形態における照明光学系ユニット40を例示する図である。
図4は、実施形態における照明光学系ユニット40を例示する図である。
図4に示されるように、照明光学系ユニット40は、カラーホイール401、ライトトンネル402、リレーレンズ403,404、シリンダミラー405、凹面ミラー406を有する。
カラーホイール401は、例えば周方向の異なる部分にR(レッド)、G(グリーン)、B(ブルー)の各色のフィルタが設けられている円盤である。カラーホイール401は、高速回転することで、光源30から照射される光を、RGB各色に時分割する。
ライトトンネル402は、例えば板ガラス等の貼り合わせによって四角筒状に形成されている。ライトトンネル402は、カラーホイール401を透過したRGB各色の光を、内面で多重反射することで輝度分布を均一化してリレーレンズ403,404に導く。
リレーレンズ403,404は、ライトトンネル402から出射された光の軸上色収差を補正しつつ集光する。
シリンダミラー405及び凹面ミラー406は、リレーレンズ403,404から出射された光を、画像表示ユニット50に設けられているDMD551に反射する。DMD551は、凹面ミラー406からの反射光を変調して投影画像を生成する。
[投影光学系ユニット]
図5は、実施形態における投影光学系ユニット60の内部構成を例示する図である。
図5は、実施形態における投影光学系ユニット60の内部構成を例示する図である。
図5に示されるように、投影光学系ユニット60は、投影レンズ601、折り返しミラー602、曲面ミラー603がケースの内部に設けられている。
投影レンズ601は、複数のレンズを有し、画像表示ユニット50のDMD551によって生成された投影画像を、折り返しミラー602に結像させる。折り返しミラー602及び曲面ミラー603は、結像された投影画像を拡大するように反射して、プロジェクタ1の外部のスクリーンS等に投影する。
[画像表示ユニット]
図6は、実施形態における画像表示ユニット50を例示する斜視図である。また、図7は、実施形態における画像表示ユニット50を例示する側面図である。
図6は、実施形態における画像表示ユニット50を例示する斜視図である。また、図7は、実施形態における画像表示ユニット50を例示する側面図である。
図6及び図7に示されるように、画像表示ユニット50は、固定支持されている固定ユニット51、固定ユニット51に対して移動可能に設けられている可動ユニット55を有する。
固定ユニット51は、第1固定板としてのトッププレート511、第2固定板としてのベースプレート512を有する。固定ユニット51は、トッププレート511とベースプレート512とが所定の間隙を介して平行に設けられており、照明光学系ユニット40の下部に固定される。
可動ユニット55は、DMD551、第1可動板としての可動プレート552、第2可動板としての結合プレート553、ヒートシンク554を有し、固定ユニット51に移動可能に支持されている。
可動プレート552は、固定ユニット51のトッププレート511とベースプレート512との間に設けられ、固定ユニット51によってトッププレート511及びベースプレート512と平行且つ表面に平行な方向に移動可能に支持されている。
結合プレート553は、固定ユニット51のベースプレート512を間に挟んで可動プレート552に固定されている。結合プレート553は、上面側にDMD551が固定して設けられ、下面側にヒートシンク554が固定されている。結合プレート553は、可動プレート552に固定されることで、可動プレート552、DMD551、及びヒートシンク554と共に固定ユニット51に移動可能に支持されている。
DMD551は、結合プレート553の可動プレート552側の面に設けられ、可動プレート552及び結合プレート553と共に移動可能に設けられている。DMD551は、可動式の複数のマイクロミラーが格子状に配列された画像生成面を有する。DMD551の各マイクロミラーは、鏡面がねじれ軸周りに傾動可能に設けられており、システムコントロール部10の画像制御部11から送信される画像信号に基づいてON/OFF駆動される。
マイクロミラーは、例えば「ON」の場合には、光源30からの光を投影光学系ユニット60に反射するように傾斜角度が制御される。また、マイクロミラーは、例えば「OFF」の場合には、光源30からの光をOFF光板に向けて反射する方向に傾斜角度が制御される。
このように、DMD551は、画像制御部11から送信される画像信号によって各マイクロミラーの傾斜角度が制御され、光源30から照射されて照明光学系ユニット40を通った光を変調して投影画像を生成する。
ヒートシンク554は、放熱手段の一例であり、少なくとも一部分がDMD551に当接するように設けられている。ヒートシンク554は、移動可能に支持される結合プレート553にDMD551と共に設けられることで、DMD551に当接して効率的に冷却することが可能になっている。このような構成により、本実施形態に係るプロジェクタ1では、ヒートシンク554がDMD551の温度上昇を抑制し、DMD551の温度上昇による動作不良や故障等といった不具合の発生が低減されている。
(固定ユニット)
図8は、実施形態における固定ユニット51を例示する斜視図である。また、図9は、実施形態における固定ユニット51を例示する分解斜視図である。
図8は、実施形態における固定ユニット51を例示する斜視図である。また、図9は、実施形態における固定ユニット51を例示する分解斜視図である。
図8及び図9に示されるように、固定ユニット51は、トッププレート511、ベースプレート512を有する。
トッププレート511及びベースプレート512は、平板状部材から形成され、それぞれ可動ユニット55のDMD551に対応する位置に中央孔513,514が設けられている。また、トッププレート511及びベースプレート512は、複数の支柱515によって、所定の間隙を介して平行に設けられている。
支柱515は、図9に示されるように、上端部がトッププレート511に形成されている支柱孔516に圧入され、雄ねじ溝が形成されている下端部がベースプレート512に形成されている支柱孔517に挿入される。支柱515は、トッププレート511とベースプレート512との間に一定の間隔を形成し、トッププレート511とベースプレート512とを平行に支持する。
また、トッププレート511及びベースプレート512には、支持球体521を回転可能に保持する支持孔522,526がそれぞれ複数形成されている。
トッププレート511の支持孔522には、内周面に雌ねじ溝を有する円筒状の保持部材523が挿入される。保持部材523は、支持球体521を回転可能に保持し、位置調整ねじ524が上から挿入される。ベースプレート512の支持孔526は、下端側が蓋部材527によって塞がれ、支持球体521を回転可能に保持する。
トッププレート511及びベースプレート512の支持孔522,526に回転可能に保持される支持球体521は、それぞれトッププレート511とベースプレート512との間に設けられる可動プレート552に当接し、可動プレート552を移動可能に支持する。
図10は、実施形態における固定ユニット51による可動プレート552の支持構造を説明するための図である。また、図11は、図10に示されるA部分の概略構成を例示する部分拡大図である。
図10及び図11に示されるように、トッププレート511では、支持孔522に挿入される保持部材523によって支持球体521が回転可能に保持されている。また、ベースプレート512では、下端側が蓋部材527によって塞がれている支持孔526によって支持球体521が回転可能に保持されている。
各支持球体521は、支持孔522,526から少なくとも一部分が突出するように保持され、トッププレート511とベースプレート512との間に設けられる可動プレート552に当接して支持する。可動プレート552は、回転可能に設けられている複数の支持球体521により、トッププレート511及びベースプレート512と平行且つ表面に平行な方向に移動可能に両面から支持される。
また、トッププレート511側に設けられている支持球体521は、可動プレート552とは反対側で当接する位置調整ねじ524の位置に応じて、保持部材523の下端からの突出量が変化する。例えば、位置調整ねじ524がZ1方向に変位すると、支持球体521の突出量が減り、トッププレート511と可動プレート552との間隔が小さくなる。また、例えば、位置調整ねじ524がZ2方向に変位すると、支持球体521の突出量が増え、トッププレート511と可動プレート552との間隔が大きくなる。
このように、位置調整ねじ524を用いて支持球体521の突出量を変化させることで、トッププレート511と可動プレート552との間隔を適宜調整できる。
また、図8及び図9に示されるように、トッププレート511のベースプレート512側の面には、磁石531,532,533,534が設けられている。
図12は、実施形態におけるトッププレート511を例示する底面図である。図12に示されるように、トッププレート511のベースプレート512側の面には、磁石531,532,533,534が設けられている。
磁石531,532,533,534は、トッププレート511の中央孔513を囲むように4箇所に設けられている。磁石531,532,533,534は、それぞれ長手方向が平行になるように配置された直方体状の2つの磁石で構成され、それぞれ可動プレート552に及ぶ磁界を形成する。
磁石531,532,533,534は、それぞれ可動プレート552の上面に各磁石531,532,533,534に対向して設けられているコイルとで、可動プレート552を移動させる移動手段を構成する。
なお、上記した固定ユニット51に設けられる支柱515、支持球体521の数や位置等は、可動プレート552を移動可能に支持できればよく、本実施形態に例示される構成に限られるものではない。
(可動ユニット)
図13は、実施形態における可動ユニット55を例示する斜視図である。また、図14は、実施形態における可動ユニット55を例示する分解斜視図である。
図13は、実施形態における可動ユニット55を例示する斜視図である。また、図14は、実施形態における可動ユニット55を例示する分解斜視図である。
図13及び図14に示されるように、可動ユニット55は、DMD551、可動プレート552、結合プレート553、ヒートシンク554、保持部材555、DMD基板557を有し、固定ユニット51に対して移動可能に支持されている。
可動プレート552は、上記したように、固定ユニット51のトッププレート511とベースプレート512との間に設けられ、複数の支持球体521により表面に平行な方向に移動可能に支持される。
図15は、実施形態における可動プレート552を例示する斜視図である。
図15に示されるように、可動プレート552は、平板状の部材から形成され、DMD基板557に設けられるDMD551に対応する位置に中央孔570を有し、中央孔570の周囲にコイル581,582,583,584が設けられている。
コイル581,582,583,584は、それぞれZ1Z2方向に平行な軸を中心として電線が巻き回されることで形成され、可動プレート552のトッププレート511側の面に形成されている凹部に設けられてカバーで覆われている。コイル581,582,583,584は、それぞれトッププレート511の磁石531,532,533,534とで、可動プレート552を移動させる移動手段を構成する。
トッププレート511の磁石531,532,533,534と、可動プレート552のコイル581,582,583,584とは、可動ユニット55が固定ユニット51に支持された状態で、それぞれ対向する位置に設けられている。コイル581,582,583,584に電流が流されると、磁石531,532,533,534によって形成される磁界により、可動プレート552を移動させる駆動力となるローレンツ力が発生する。
可動プレート552は、磁石531,532,533,534とコイル581,582,583,584との間で発生する駆動力としてのローレンツ力を受けて、固定ユニット51に対して、XY平面において直線的又は回転するように変位する。
各コイル581,582,583,584に流される電流の大きさ及び向きは、システムコントロール部10の移動制御部12によって制御される。移動制御部12は、各コイル581,582,583,584に流す電流の大きさ及び向きによって、可動プレート552の移動(回転)方向、移動量や回転角度等を制御する。
本実施形態では、第1駆動手段として、コイル581及び磁石531と、コイル584及び磁石534とが、X1X2方向に対向して設けられている。コイル581及びコイル584に電流が流されると、図15に示されるようにX1方向又はX2のローレンツ力が発生する。可動プレート552は、コイル581及び磁石531と、コイル584及び磁石534とにおいて発生するローレンツ力により、X1方向又はX2方向に移動する。
また、本実施形態では、第2駆動手段として、コイル582及び磁石532と、コイル583及び磁石533とが、X1X2方向に並んで設けられ、磁石532及び磁石533は、磁石531及び磁石534とは長手方向が直交するように配置されている。このような構成において、コイル582及びコイル583に電流が流されると、図15に示されるようにY1方向又はY2方向のローレンツ力が発生する。
可動プレート552は、コイル582及び磁石532と、コイル583及び磁石533とにおいて発生するローレンツ力により、Y1方向又はY2方向に移動する。また、可動プレート552は、コイル582及び磁石532と、コイル583及び磁石533とで反対方向に発生するローレンツ力により、XY平面において回転するように変位する。
例えば、コイル582及び磁石532においてY1方向のローレンツ力が発生し、コイル583及び磁石533においてY2方向のローレンツ力が発生するように電流が流されると、可動プレート552は、上面視で時計回り方向に回転するように変位する。また、コイル582及び磁石532においてY2方向のローレンツ力が発生し、コイル583及び磁石533においてY1方向のローレンツ力が発生するように電流が流されると、可動プレート552は、上面視で反時計回り方向に回転するように変位する。
また、可動プレート552には、固定ユニット51の支柱515に対応する位置に、可動範囲制限孔571が設けられている。可動範囲制限孔571は、固定ユニット51の支柱515が挿入され、例えば振動や何らかの異常等により可動プレート552が大きく移動した時に支柱515に接触することで、可動プレート552の可動範囲を制限する。
以上で説明したように、本実施形態では、システムコントロール部10の移動制御部12が、コイル581,582,583,584に流す電流の大きさや向きを制御することで、可動範囲内で可動プレート552を任意の位置に移動させることができる。
なお、移動手段としての磁石531,532,533,534及びコイル581,582,583,584の数、位置等は、可動プレート552を任意の位置に移動させることが可能であれば、本実施形態とは異なる構成であってもよい。例えば、移動手段としての磁石は、トッププレート511の上面に設けられてもよく、ベースプレート512の何れかの面に設けられてもよい。また、例えば、磁石が可動プレート552に設けられ、コイルがトッププレート511又はベースプレート512に設けられてもよい。
また、可動範囲制限孔571の数、位置及び形状等は、本実施形態に例示される構成に限られない。例えば、可動範囲制限孔571は一つであってもよく、複数であってもよい。また、可動範囲制限孔571の形状は、例えば長方形や円形等、本実施形態とは異なる形状であってもよい。
固定ユニット51によって移動可能に支持される可動プレート552の下面側(ベースプレート512側)には、図13に示されるように、結合プレート553が固定されている。結合プレート553は、平板状部材から形成され、DMD551に対応する位置に中央孔を有し、周囲に設けられている折り曲げ部分が3本のねじ591によって可動プレート552の下面に固定されている。
図16は、可動プレート552が外された可動ユニット55を例示する斜視図である。
図16に示されるように、結合プレート553には、上面側にDMD551、下面側にヒートシンク554が設けられている。結合プレート553は、可動プレート552に固定されることで、DMD551、ヒートシンク554と共に、可動プレート552に伴って固定ユニット51に対して移動可能に設けられている。
DMD551は、DMD基板557に設けられており、DMD基板557が保持部材555と結合プレート553との間で挟み込まれることで、結合プレート553に固定されている。保持部材555、DMD基板557、結合プレート553、ヒートシンク554は、図14及び図16に示されるように、固定部材としての段付ねじ560及び押圧手段としてのばね561によって重ねて固定されている。
図17は、実施形態における可動ユニット55のDMD保持構造について説明する図である。図17は、可動ユニット55の側面図であり、可動プレート552及び結合プレート553は図示が省略されている。
図17に示されるように、ヒートシンク554は、結合プレート553に固定された状態で、DMD基板557に設けられている貫通孔からDMD551の下面に当接する突出部554aを有する。なお、ヒートシンク554の突出部554aは、DMD基板557の下面であって、DMD551に対応する位置に当接するように設けられてもよい。
また、DMD551の冷却効果を高めるために、ヒートシンク554の突出部554aとDMD551との間に弾性変形可能な伝熱シートが設けられてもよい。伝熱シートによりヒートシンク554の突出部554aとDMD551との間の熱伝導性が向上し、ヒートシンク554によるDMD551の冷却効果が向上する。
上記したように、保持部材555、DMD基板557、ヒートシンク554は、段付きねじ560及びばね561によって重ねて固定されている。段付きねじ560が締められると、ばね561がZ1Z2方向に圧縮され、図17に示されるZ1方向の力F1がばね561から生じる。ばね561から生じる力F1により、ヒートシンク554はZ1方向に力F2でDMD551に押圧されることとなる。
本実施形態では、段付きねじ560及びばね561は4箇所に設けられており、ヒートシンク554にかかる力F2は、4つのばね561に生じる力F1を合成したものに等しい。また、ヒートシンク554からの力F2は、DMD551が設けられているDMD基板557を保持する保持部材555に作用する。この結果、保持部材555には、ヒートシンク554からの力F2に相当するZ2方向の反力F3が生じ、保持部材555と結合プレート553との間でDMD基板557を保持できるようになる。
段付きねじ560及びばね561には、保持部材555に生じる力F3からZ2方向の力F4が作用する。ばね561は、4箇所に設けられているため、それぞれに作用する力F4は、保持部材555に生じる力F3の4分の1に相当し、力F1と釣り合うこととなる。
また、保持部材555は、図17において矢印Bで示されるように撓むことが可能な部材で板ばね状に形成されている。保持部材555は、ヒートシンク554の突出部554aに押圧されて撓み、ヒートシンク554をZ2方向に押し返す力が生じることで、DMD551とヒートシンク554との接触をより強固に保つことができる。
可動ユニット55は、以上で説明したように、可動プレート552と、DMD551及びヒートシンク554を有する結合プレート553とが、固定ユニット51によって移動可能に支持されている。可動ユニット55の位置は、システムコントロール部10の移動制御部12によって制御される。また、可動ユニット55には、DMD551に当接するヒートシンク554が設けられており、DMD551の温度上昇に起因する動作不良や故障といった不具合の発生が防止されている。
<画像投影>
上記したように、本実施形態に係るプロジェクタ1において、投影画像を生成するDMD551は、可動ユニット55に設けられており、システムコントロール部10の移動制御部12によって可動ユニット55と共に位置が制御される。
上記したように、本実施形態に係るプロジェクタ1において、投影画像を生成するDMD551は、可動ユニット55に設けられており、システムコントロール部10の移動制御部12によって可動ユニット55と共に位置が制御される。
移動制御部12は、例えば、画像投影時にフレームレートに対応する所定の周期で、DMD551の複数のマイクロミラーの配列間隔未満の距離だけ離れた複数の位置の間を高速移動するように可動ユニット55の位置を制御する。このとき、画像制御部11は、それぞれの位置に応じてシフトした投影画像を生成するようにDMD551に画像信号を送信する。
例えば、移動制御部12は、X1X2方向及びY1Y2方向にDMD551のマイクロミラーの配列間隔未満の距離だけ離れた位置P1と位置P2との間で、DMD551を所定の周期で往復移動させる。このとき、画像制御部11が、それぞれの位置に応じてシフトした投影画像を生成するようにDMD551を制御することで、投影画像の解像度を、DMD551の解像度の約2倍にすることが可能になる。また、DMD551の移動位置を増やすことで、投影画像の解像度をDMD551の2倍以上にすることもできる。
このように、移動制御部12が可動ユニット55と共にDMD551を所定の周期で移動させ、画像制御部11がDMD551に位置に応じた投影画像を生成させることで、DMD551の解像度以上の画像を投影することが可能になる。
また、本実施形態に係るプロジェクタ1では、移動制御部12がDMD551を可動ユニット55と共に回転するように制御することで、投影画像を縮小させることなく回転させることができる。例えばDMD551等の画像生成手段が固定されているプロジェクタでは、投影画像を縮小させなければ、投影画像の縦横比を維持しながら回転させることはできない。これに対して、本実施形態に係るプロジェクタ1では、DMD551を回転させることができるため、投影画像を縮小させることなく回転させて傾き等の調整を行うことが可能になっている。
以上で説明したように、本実施形態に係るプロジェクタ1では、DMD551が移動可能に構成されることで、投影画像の高解像度化が可能になっている。また、DMD551を冷却するヒートシンク554が、DMD551と共に可動ユニット55に搭載されていることで、DMD551に当接してより効率的に冷却することが可能になり、DMD551の温度上昇が抑制されている。したがって、プロジェクタ1では、DMD551の温度上昇に起因して発生する動作不良や故障といった不具合が低減される。
ここで、投影画像の高解像度化の一例について説明する。
図18(a)は、DMD551を移動させなかった場合の投影画像の拡大図であり、図18(b)は、X1X2方向及びY1Y2方向にDMD551のマイクロミラーの配列間隔の1/2の距離、所定の周期で往復移動させた場合の投影画像の拡大図である。なお、図18は、斜め45°の線画像の拡大図である。
図18(a)は、DMD551を移動させなかった場合の投影画像の拡大図であり、図18(b)は、X1X2方向及びY1Y2方向にDMD551のマイクロミラーの配列間隔の1/2の距離、所定の周期で往復移動させた場合の投影画像の拡大図である。なお、図18は、斜め45°の線画像の拡大図である。
図18(a)に示すように、DMD551を移動させなかった場合、斜め45°の線は、マイクロミラーの配列間隔の段差の線となる。一方、図18(b)に示すように、DMD551を、X1X2方向及びY1Y2方向にDMD551のマイクロミラーの配列間隔aの1/2aの距離、所定の周期で往復移動させた場合、斜め45°の線は、マイクロミラーの配列間隔aの1/2aの段差の線となる。これにより、DMD551を移動させなかった場合に比べて、投影画像の解像度を2倍にすることができる。
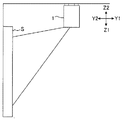
プロジェクタ1は、先の図1に示したように、出射窓3が上向きとなる床上や机上に設置する通常設置以外の姿勢で設置されることがある。例えば、図19に示すように、天井などに吊り下げられた姿勢で設置(以下「天吊設置」と言う)されたり、図20に示すように、装置の側面が下向きとなるような姿勢で設置(以下、ポートレート設置という)される場合がある。このポートレート設置とすることにより、通常設置において横長(短辺が上下方向、長辺が水平方向)の投影画像を、縦長(短辺が水平方向、長辺が上下方向)にすることができる。また、ユーザーによっては、図21に示すように、プロジェクタ1を、スクリーンSの面の垂直方向に対して所定角度傾けた姿勢で設置(以下、前後傾斜設置という)する場合もある。
図22は、プロジェクタの設置姿勢と、そのときの可動ユニット55の重力方向について説明する図である。
図22(a)に示すように、通常設置のときは、可動ユニット55の重力方向は、Z2方向であり、可動ユニット55の重力は、固定ユニット51から離れる方向に働く。図22(b)に示すように、天吊設置のときは、可動ユニット55の重力方向が、Z1方向となり、可動ユニット55の重力は、固定ユニット51に近づく方向に働く。また、図22(c)に示すように、先の図20に示すポートレート設置の場合、可動ユニット55の重力方向が、X1方向となる。一方、プロジェクタ1のX2方向側(投影光学系ユニット60配置側)の側面を下向きにしたポートレート設置のときは、図22(d)に示すように、可動ユニット55の重力方向が、X2方向となる。このように、ポートレート設置のとき、可動ユニットの重力方向が、プロジェクタ1の幅方向(X1,X2方向)となる。
また、先の図21に示した前後傾斜設置の場合は、傾斜角度に応じた可動ユニット重力が、プロジェクタの奥行き方向(Y1,Y2方向)に働く。具体的に説明すると、可動ユニット55の荷重をg、傾斜角度をθとすると、gSINθが、傾斜角度に応じた可動ユニットの重力としてプロジェクタの奥行き方向(Y1,Y2方向)に働くことになる。
このように、プロジェクタ1の設置姿勢により、プロジェクタに対する可動ユニット55の重力の方向が互いに異なり、その結果、プロジェクタ1の設置姿勢により、DMD551の移動制御において、可動ユニット55の重力の影響が互いに異なってくる。
例えば、図22(c)示す状態のとき、通常設置と同じ駆動条件で可動ユニット55をX1方向に移動させると、可動ユニット55の重力の影響で、所定の移動距離で止まらず、オーバシュートしてしまうおそれがある。また、可動ユニット55をX2方向に移動させる場合は、可動ユニット55の重力に抗して可動ユニット55を上昇させる必要があり、通常設置時の駆動条件では、可動ユニット55を持ち上げることができないおそれがある。その結果、DMD551の位置を精度よく位置制御できず、色ずれが生じるなど、投影画像の品質が著しく劣化するおそれがある。
また、先の図21に示した前後傾斜設置の場合は、可動ユニット55をプロジェクタの奥行き方向(Y1,Y2方向)の移動において、重力の影響を受けて、奥行き方向において、DMD551の位置を精度よく位置制御できない。
また、天吊設置においては、可動ユニット55は、固定ユニット51へ近づく方向に重力が働くため、コイル581,582,583,584と磁石との距離が、通常設置のときに比べて近づく場合がある。その結果、通常設置時の駆動条件でDMD511の移動制御を行った場合、DMD551の位置を精度よく位置制御できないおそれがある。
そこで、本実施形態においては、プロジェクタ1の設置姿勢に応じて、可動ユニット55を移動させる駆動条件を設定した。
図23は、駆動条件設定フローの一例を示す図である。
移動制御手段たる移動制御部12(図2参照)は、プロジェクタ1がどのような設置姿勢で設置されているかを検知する。
本実施形態のプロジェクタでは、ユーザーが操作部やパソコンの操作により「天吊モード」や「ポートレートモード」など、設置姿勢に対応した投影モードが設定ができるようになっている。天吊設置の場合は、通常設置のときと同じ投影設定であると、上下反転した投影画像が投影されてしまう。また、ポートレート設置の場合は、通常設置のときと同じ投影設定であると、90°回転した投影画像が投影されてしまう。そのため、天吊設置した場合や、ポートレート設置した場合は、ユーザーが操作部やパソコンの操作により「天吊モード」や「ポートレートモード」など、設置姿勢に対応した投影モードに設定にするのである。「天吊モード」に設定された場合、先の図2に示した画像制御部11は、入力された画像データについて、上下反転する処理を行う。また、「ポートレートモード」に設定された場合は、先の図2に示した画像制御部11は、入力された画像データについて、90°回転する処理や、横長画像を縦長画像に変換する処理などを行う。
移動制御手段たる移動制御部12(図2参照)は、プロジェクタ1がどのような設置姿勢で設置されているかを検知する。
本実施形態のプロジェクタでは、ユーザーが操作部やパソコンの操作により「天吊モード」や「ポートレートモード」など、設置姿勢に対応した投影モードが設定ができるようになっている。天吊設置の場合は、通常設置のときと同じ投影設定であると、上下反転した投影画像が投影されてしまう。また、ポートレート設置の場合は、通常設置のときと同じ投影設定であると、90°回転した投影画像が投影されてしまう。そのため、天吊設置した場合や、ポートレート設置した場合は、ユーザーが操作部やパソコンの操作により「天吊モード」や「ポートレートモード」など、設置姿勢に対応した投影モードに設定にするのである。「天吊モード」に設定された場合、先の図2に示した画像制御部11は、入力された画像データについて、上下反転する処理を行う。また、「ポートレートモード」に設定された場合は、先の図2に示した画像制御部11は、入力された画像データについて、90°回転する処理や、横長画像を縦長画像に変換する処理などを行う。
移動制御部12は、投影モードの設定を検知して、投影モードが「天吊モード」の場合(S1のYes)、可動ユニット55の駆動条件として、天吊駆動条件を選択する。
また、投影モードが「ポートレートモード」の場合(S2のYes)、可動ユニット55の駆動条件として、ポートレート駆動条件を選択する(S7)。
また、先の図2に示すように、プロジェクタ1は、加速度センサ13を備えており、プロジェクタ1の傾斜角度を検知できるようになっている。移動制御部12は、この加速度センサ13の検知結果に基づいて、プロジェクタ1が傾斜設置されているか否かをチェックして、傾斜設置されている場合(S3のYes)は、傾斜角度に応じた駆動条件を選択する(S8)。
移動制御部12は、「天吊モード」や「ポートレートモード」などが設定されておらず、また、加速度センサ13が傾斜角度を検知していない場合(S1のNo、S2のNo、S3のNo)は、通常設置に対応した通常駆動条件を選択する(S4)。
そして、移動制御部12は、選択した駆動条件に基づいて、コイル581,582,583,584に流す電流を制御する(S5)。
各駆動条件は、システムコントロール部10の不揮発性メモリにそれぞれ記憶されており、予め実験により求められた最適な駆動条件が記憶されている。例えば、ポートレート駆動条件の場合は、ポートレート設置で実験を行って、良好な投影画像が得られたときの駆動条件である。具体的には、電流を切り替えるタイミングや、電流値が各設置姿勢に応じて最適化された条件となっている。
ポートレート設置の場合のポートレート駆動条件の一例としては、次のような駆動条件とすることが考えられる。可動ユニット55を下降させる場合は、通常設置の駆動条件に対して、下降方向から上昇方向に駆動力を切り替えるタイミングを速くしたり、電流値を小さくして駆動力たるローレンツ力を小さくしたりする。また、可動ユニット55を上昇させる場合は、通常設置の駆動条件に対して、電流値を大きくして、駆動力たるローレンツ力を大きくしたりする。
また、ポートレート駆動条件において、重力方向と直交する方向のY1,Y2方向の駆動条件も、通常設置の駆動条件と異ならせてもよい。これは、通常設置とポートレート設置とで、同じ重力方向に対して直交する方向の移動であっても重力の影響が異なる。例えば、支持球体521と支持孔522,526との摩擦力などが、重力の影響により異なってくるおそれがある。このような摩擦力の差は、僅かであり、そのため駆動への影響も僅かである。しかし、上述したように、投影画像を高解像度化するために、可動ユニット55たる可動保持手段は、微小の範囲を高速度で往復移動するため、このような僅かな差による僅かな駆動への影響でも大きく画像に影響するおそれがある。よって、ポートレート設置において、重力方向と直交する方向のY1,Y2方向の駆動条件も、通常設置の駆動条件と異ならせことで、Y1,Y2方向の移動も精度よく行うことができる。
また、傾斜設置のときの駆動条件は、各傾斜角度に応じた最適な駆動条件を不揮発性メモリに記憶しておいても良いし、計算により各傾斜角度に応じた最適な駆動条件を算出してもよい。
天吊設置においては、通常設置と同様、可動ユニット55の移動は、いずれの方向でも水平移動である。しかし、天吊設置と通常設置とで、重力の影響が互いに異なる。すなわち、上述したように、天吊設置は、通常設置とは逆に、可動ユニット55は、固定ユニット51へ近づく方向に重力が働く。そのため、コイル581,582,583,584と磁石との距離が、通常設置のときに比べて近づき、通常設置の駆動条件では、駆動力が大きくなってしまう場合がある。また、天吊設置と通常設置とで支持球体521と支持孔522,526との摩擦力なども、重力の影響により異なってくるおそれがある。これらの違いは、僅かであり、駆動の影響が僅かでも、ミクロンオーダで高速で可動ユニット55を往復移動するため、この僅かな違いが投影画像に影響を及ぼすおそれがある。よって、天吊設置において、駆動条件を、通常設置の駆動条件とは、別に設定することで、精度よく可動ユニット55を移動させることができる。
また、加速度センサの検知結果に基づいて、天吊設置、ポートレート設置を検知してもよい。
以上に説明したものは一例であり、以下の態様毎に特有の効果を奏する。
(態様1)
画像表示ユニット50などの画像生成手段移動装置は、プロジェクタ1などの画像投影装置に設けられ、光源30から照射される光を用いて画像を生成するDMD551などの画像生成手段を保持し、移動可能に構成された可動ユニット55などの可動保持手段と、可動保持手段を移動させる駆動手段(コイルと磁石などで構成)と駆動手段を制御する移動制御部12などの移動制御手段と、画像投影装置の設置姿勢を検知する検知手段(本実施形態では、移動制御部12などで構成)とを備え、移動制御手段は、検知手段の検知結果に基づいて、可動保持手段の駆動条件を設定する。
これによれば、実施形態で説明したように、画像投影装置の設置姿勢に基づいて、駆動手段の駆動条件を設定することで、画像投影装置の設置姿勢による重力の影響を考慮した最適な駆動条件で駆動手段を制御することが可能となる。
例えば、画像生成手段を保持した可動保持手段の往復移動が上下方向となる姿勢で画像投影装置を設置した場合、可動保持手段を下降させる場合は、重力の影響で、所定位置よりもオーバーして可動保持手段が移動してしまう場合がある。よって、この場合は、可動保持手段の往復移動が水平方向となる姿勢で画像投影装置を設置した場合に比べて、例えば、下降から上昇に切り替えるタイミングを速めたり、駆動力を弱めたりした駆動条件に設定する。また、可動保持手段を上昇させる場合は、重力の影響で、所定のタイミングまでに規定の位置まで可動保持手段を上昇させることができない場合がある。よってこの場合は、可動保持手段の往復移動が水平方向となる姿勢で画像投影装置を設置した場合に比べて、駆動力が強くなる駆動条件に設定する。
このように、画像投影装置の設置姿勢による重力の影響を考慮した駆動条件で駆動手段を制御することで、画像投影装置の設置姿勢によらず、画像生成手段を精度よく所定の周期で往復移動させることができ、画像投影装置の設置姿勢によらずに、投影画像の高解像度化を図ることができる。
(態様1)
画像表示ユニット50などの画像生成手段移動装置は、プロジェクタ1などの画像投影装置に設けられ、光源30から照射される光を用いて画像を生成するDMD551などの画像生成手段を保持し、移動可能に構成された可動ユニット55などの可動保持手段と、可動保持手段を移動させる駆動手段(コイルと磁石などで構成)と駆動手段を制御する移動制御部12などの移動制御手段と、画像投影装置の設置姿勢を検知する検知手段(本実施形態では、移動制御部12などで構成)とを備え、移動制御手段は、検知手段の検知結果に基づいて、可動保持手段の駆動条件を設定する。
これによれば、実施形態で説明したように、画像投影装置の設置姿勢に基づいて、駆動手段の駆動条件を設定することで、画像投影装置の設置姿勢による重力の影響を考慮した最適な駆動条件で駆動手段を制御することが可能となる。
例えば、画像生成手段を保持した可動保持手段の往復移動が上下方向となる姿勢で画像投影装置を設置した場合、可動保持手段を下降させる場合は、重力の影響で、所定位置よりもオーバーして可動保持手段が移動してしまう場合がある。よって、この場合は、可動保持手段の往復移動が水平方向となる姿勢で画像投影装置を設置した場合に比べて、例えば、下降から上昇に切り替えるタイミングを速めたり、駆動力を弱めたりした駆動条件に設定する。また、可動保持手段を上昇させる場合は、重力の影響で、所定のタイミングまでに規定の位置まで可動保持手段を上昇させることができない場合がある。よってこの場合は、可動保持手段の往復移動が水平方向となる姿勢で画像投影装置を設置した場合に比べて、駆動力が強くなる駆動条件に設定する。
このように、画像投影装置の設置姿勢による重力の影響を考慮した駆動条件で駆動手段を制御することで、画像投影装置の設置姿勢によらず、画像生成手段を精度よく所定の周期で往復移動させることができ、画像投影装置の設置姿勢によらずに、投影画像の高解像度化を図ることができる。
(態様2)
(態様1)において、移動制御部12などの移動制御手段は、検知手段が画像投影装置が天井に吊り下げて設置された状態を検知したとき、駆動手段の駆動条件を、天吊駆動条件などの天井吊り下げ設置に対応する駆動条件に設定する。
実施形態で説明したように、天井に吊り下げた天吊設置の場合、可動ユニット55に設けたコイルが、固定ユニットに設けた磁石に近づく方向に可動ユニット55の重力が働き、机上や床上に設置される通常設置の場合とは、逆方向に重力が働く。そのため、重力の影響で、通常設置と天吊設置とでコイルと磁石との距離が互いに異なる場合がある。また、天吊設置と通常設置とで重力の影響が異なることで、例えば、支持球体521と支持孔522,526との摩擦力なども異なってくる。このような摩擦力差や、磁石とコイルとの隙間の差は、僅かであり、駆動への影響も僅かである。しかし、上述したように、投影画像を高解像度化するために、可動ユニット55たる可動保持手段は、微小の範囲を高速度で往復移動するため、このような僅かな差による僅かな駆動への影響も投影画像に影響するおそれがある。
よって、(態様2)のように、天吊設置のとき、駆動手段の駆動条件を、天吊設置に対応する天吊駆動条件に設定することで、天吊設置でも、精度のよく画像生成手段を所定の周期で往復移動することができ、投影画像の高解像度化を図ることができる。
(態様1)において、移動制御部12などの移動制御手段は、検知手段が画像投影装置が天井に吊り下げて設置された状態を検知したとき、駆動手段の駆動条件を、天吊駆動条件などの天井吊り下げ設置に対応する駆動条件に設定する。
実施形態で説明したように、天井に吊り下げた天吊設置の場合、可動ユニット55に設けたコイルが、固定ユニットに設けた磁石に近づく方向に可動ユニット55の重力が働き、机上や床上に設置される通常設置の場合とは、逆方向に重力が働く。そのため、重力の影響で、通常設置と天吊設置とでコイルと磁石との距離が互いに異なる場合がある。また、天吊設置と通常設置とで重力の影響が異なることで、例えば、支持球体521と支持孔522,526との摩擦力なども異なってくる。このような摩擦力差や、磁石とコイルとの隙間の差は、僅かであり、駆動への影響も僅かである。しかし、上述したように、投影画像を高解像度化するために、可動ユニット55たる可動保持手段は、微小の範囲を高速度で往復移動するため、このような僅かな差による僅かな駆動への影響も投影画像に影響するおそれがある。
よって、(態様2)のように、天吊設置のとき、駆動手段の駆動条件を、天吊設置に対応する天吊駆動条件に設定することで、天吊設置でも、精度のよく画像生成手段を所定の周期で往復移動することができ、投影画像の高解像度化を図ることができる。
(態様3)
(態様1)または(態様2)において、移動制御部12などの移動制御手段は、検知手段が、画像投影装置の側面を下向きにして設置された状態を検知したとき、駆動手段の駆動条件を、側面下向き設置に対応する駆動条件に設定する。
実施形態で説明したように、画像投影装置の側面を下向きにして設置するポートレート設置の場合、可動ユニット55などの可動保持手段のX1X2方向の移動が、上下方向となる。この場合、可動保持手段を下降する方向に移動させた場合、可動保持手段の重力の影響で、所定の位置よりも下方へ移動するおそれがある。また、可動保持手段を上昇させる場合は、可動保持手段の重力の影響で、可動保持手段が持ち上がらず、可動保持手段を移動させることができなかったり、所定のタイミングまで、可動保持手段を規定の位置に到達させることができなかったりするおそれがある。
よって、(態様3)のように、ポートレート設置のとき、駆動手段の駆動条件を、ポートレート駆動条件などの側面下向き設置に対応する駆動条件に設定することで、ポートレート設置のときに最適な駆動条件で、可動保持手段を動かすことができる。これにより、ポートレート設置でも、精度のよく画像生成手段を所定の周期で往復移動することができ、投影画像の高解像度化を図ることができる。
(態様1)または(態様2)において、移動制御部12などの移動制御手段は、検知手段が、画像投影装置の側面を下向きにして設置された状態を検知したとき、駆動手段の駆動条件を、側面下向き設置に対応する駆動条件に設定する。
実施形態で説明したように、画像投影装置の側面を下向きにして設置するポートレート設置の場合、可動ユニット55などの可動保持手段のX1X2方向の移動が、上下方向となる。この場合、可動保持手段を下降する方向に移動させた場合、可動保持手段の重力の影響で、所定の位置よりも下方へ移動するおそれがある。また、可動保持手段を上昇させる場合は、可動保持手段の重力の影響で、可動保持手段が持ち上がらず、可動保持手段を移動させることができなかったり、所定のタイミングまで、可動保持手段を規定の位置に到達させることができなかったりするおそれがある。
よって、(態様3)のように、ポートレート設置のとき、駆動手段の駆動条件を、ポートレート駆動条件などの側面下向き設置に対応する駆動条件に設定することで、ポートレート設置のときに最適な駆動条件で、可動保持手段を動かすことができる。これにより、ポートレート設置でも、精度のよく画像生成手段を所定の周期で往復移動することができ、投影画像の高解像度化を図ることができる。
(態様4)
(態様1)乃至(態様3)いずれかにおいて、移動制御部12などの移動制御手段は、検知手段が、画像投影装置が水平面に対して傾けて設置された状態を検知したとき、駆動手段の駆動条件を、画像投影装置の傾斜角度に対応する駆動条件に設定する。
実施形態で説明したように、画像投影装置が水平面に対して傾けて設置されるこことで、可動ユニット55などの可動保持手段の重力の影響を受けて、通常設置のときと同じ駆動条件では、精度よく可動保持手段を所定の周期で往復移動させることができない。
よって、傾斜設置のとき、駆動手段の駆動条件を、傾斜角度に対応する駆動条件に設定することで、プロジェクタ1などの画像投影装置が傾斜設置された場合でも、精度のよく画像生成手段を所定の周期で往復移動することができ、投影画像の高解像度化を図ることができる。
(態様1)乃至(態様3)いずれかにおいて、移動制御部12などの移動制御手段は、検知手段が、画像投影装置が水平面に対して傾けて設置された状態を検知したとき、駆動手段の駆動条件を、画像投影装置の傾斜角度に対応する駆動条件に設定する。
実施形態で説明したように、画像投影装置が水平面に対して傾けて設置されるこことで、可動ユニット55などの可動保持手段の重力の影響を受けて、通常設置のときと同じ駆動条件では、精度よく可動保持手段を所定の周期で往復移動させることができない。
よって、傾斜設置のとき、駆動手段の駆動条件を、傾斜角度に対応する駆動条件に設定することで、プロジェクタ1などの画像投影装置が傾斜設置された場合でも、精度のよく画像生成手段を所定の周期で往復移動することができ、投影画像の高解像度化を図ることができる。
(態様5)
(態様4)において、加速度センサ13などの角度センサを備え、検知手段は、角度センサの検知結果に基づいて、前記検知手段は、画像投影装置の設置姿勢を検知する。
これによれば、簡単な構成で、画像投影装置の設置姿勢を検知することができる。
(態様4)において、加速度センサ13などの角度センサを備え、検知手段は、角度センサの検知結果に基づいて、前記検知手段は、画像投影装置の設置姿勢を検知する。
これによれば、簡単な構成で、画像投影装置の設置姿勢を検知することができる。
(態様6)
画像投影装置において、(態様1)乃至(態様5)いずれかの画像生成手段可動装置を備えた。
これによれば、DMD551などの画像生成手段の解像度よりも高い解像度の投影画像を投影することができる。
画像投影装置において、(態様1)乃至(態様5)いずれかの画像生成手段可動装置を備えた。
これによれば、DMD551などの画像生成手段の解像度よりも高い解像度の投影画像を投影することができる。
(態様7)
(態様6)において、DMD551などの画像生成手段は、光源30から照射された光を画像信号に基づいて変調する複数のマイクロミラーが配列されたデジタルマイクロミラーデバイスであり、移動制御部12などの移動制御手段は、画像生成手段を、所定の周期で複数のマイクロミラーの配列間隔未満の距離を移動させるように可動保持手段を制御するものであり、画像生成手段の位置に応じた画像信号を生成する画像制御部11などの画像制御手段を備える。
これによれば、実施形態で説明したように、DMD551などの画像生成手段の解像度よりも高い解像度の投影画像を投影することができる。
(態様6)において、DMD551などの画像生成手段は、光源30から照射された光を画像信号に基づいて変調する複数のマイクロミラーが配列されたデジタルマイクロミラーデバイスであり、移動制御部12などの移動制御手段は、画像生成手段を、所定の周期で複数のマイクロミラーの配列間隔未満の距離を移動させるように可動保持手段を制御するものであり、画像生成手段の位置に応じた画像信号を生成する画像制御部11などの画像制御手段を備える。
これによれば、実施形態で説明したように、DMD551などの画像生成手段の解像度よりも高い解像度の投影画像を投影することができる。
(態様8)
(態様6)または(態様7)において、ユーザーが前記画像投影装置の設置姿勢に応じた投影モードを設定する操作部7などの投影設定手段を有し、検知手段は、ユーザーが投影設定手段で設定した投影モードにより画像投影装置の設置姿勢を検知する。
これによれば、実施形態で説明したように、操作部7などの投影設定手段により画像制御部11で入力画像データを上下反転する天吊モードや、入力画像データを90°回転させるポートレートモードなどの投影モードを備えている。検知手段は、ユーザーが投影設定手段で設定した投影モードにより画像投影装置の設置姿勢を検知することにより、簡単に、画像投影装置の設置姿勢を検知することができる。
(態様6)または(態様7)において、ユーザーが前記画像投影装置の設置姿勢に応じた投影モードを設定する操作部7などの投影設定手段を有し、検知手段は、ユーザーが投影設定手段で設定した投影モードにより画像投影装置の設置姿勢を検知する。
これによれば、実施形態で説明したように、操作部7などの投影設定手段により画像制御部11で入力画像データを上下反転する天吊モードや、入力画像データを90°回転させるポートレートモードなどの投影モードを備えている。検知手段は、ユーザーが投影設定手段で設定した投影モードにより画像投影装置の設置姿勢を検知することにより、簡単に、画像投影装置の設置姿勢を検知することができる。
1 プロジェクタ(画像投影装置)
7 操作部(投影設定手段)
10 システムコントロール部
11 画像制御部(画像制御手段)
12 移動制御部(移動制御手段)
13 加速度センサ(角度センサ)
30 光源
40 照明光学系ユニット
50 画像表示ユニット(画像生成手段移動装置)
55 可動ユニット(可動保持手段)
60 投影光学系ユニット
511 トッププレート(第1固定板)
512 ベースプレート(第2固定板)
515 支柱
521 支持球体
522,526 支持孔
524 位置調整ねじ
531,532,533,534 磁石(駆動手段)
581,582,583,584 コイル(駆動手段)
551 DMD(画像生成手段)
552 可動プレート(第1可動板)
553 結合プレート(第2可動板)
554 ヒートシンク(放熱手段)
560 段付きねじ(固定手段)
561 ばね(押圧手段)
571 可動範囲制限孔
7 操作部(投影設定手段)
10 システムコントロール部
11 画像制御部(画像制御手段)
12 移動制御部(移動制御手段)
13 加速度センサ(角度センサ)
30 光源
40 照明光学系ユニット
50 画像表示ユニット(画像生成手段移動装置)
55 可動ユニット(可動保持手段)
60 投影光学系ユニット
511 トッププレート(第1固定板)
512 ベースプレート(第2固定板)
515 支柱
521 支持球体
522,526 支持孔
524 位置調整ねじ
531,532,533,534 磁石(駆動手段)
581,582,583,584 コイル(駆動手段)
551 DMD(画像生成手段)
552 可動プレート(第1可動板)
553 結合プレート(第2可動板)
554 ヒートシンク(放熱手段)
560 段付きねじ(固定手段)
561 ばね(押圧手段)
571 可動範囲制限孔
Claims (8)
- 画像投影装置に設けられ、光源から照射される光を用いて画像を生成する画像生成手段を保持し、移動可能に構成された可動保持手段と、
前記可動保持手段を移動させる駆動手段と、
前記駆動手段を制御する移動制御手段と、
前記画像投影装置の設置姿勢を検知する検知手段とを備え、
前記移動制御手段は、前記検知手段の検知結果に基づいて、前記駆動手段の駆動条件を設定することを特徴とする画像生成手段移動装置。 - 請求項1に記載の画像生成手段移動装置において、
前記移動制御手段は、前記検知手段が前記画像投影装置が天井に吊り下げて設置された状態を検知したとき、前記駆動手段の駆動条件を、天井吊り下げ設置に対応する駆動条件に設定することを特徴とする画像生成手段移動装置。 - 請求項1または2に記載の画像生成手段移動装置において、
前記移動制御手段は、前記検知手段が、前記画像投影装置の側面を下向きにして設置された状態を検知したとき、前記駆動手段の駆動条件を、側面下向き設置に対応する駆動条件に設定することを特徴とする画像生成手段移動装置。 - 請求項1乃至3いずれかに記載の画像生成手段移動装置において、
前記移動制御手段は、前記検知手段が、前記画像投影装置が水平面に対して傾けて設置された状態を検知したとき、前記駆動手段の駆動条件を、前記画像投影装置の傾斜角度に対応する駆動条件に設定することを特徴とする画像生成手段移動装置。 - 請求項1乃至4いずれかに記載の画像生成手段移動装置において、
角度センサを備え、
前記検知手段は、前記角度センサの検知結果に基づいて、前記画像投影装置の設置姿勢を検知することを特徴とする画像生成手段移動装置。 - 請求項1乃至5いずれかに記載の画像生成手段移動装置を備えたことを特徴とする画像投影装置。
- 請求項6に記載の画像投影装置において、
前記画像生成手段は、前記光源から照射された光を画像信号に基づいて変調する複数のマイクロミラーが配列されたデジタルマイクロミラーデバイスであり、
前記移動制御手段は、前記画像生成手段を、所定の周期で前記複数のマイクロミラーの配列間隔未満の距離を移動させるように前記駆動手段を制御するものであり、
前記画像生成手段の位置に応じた画像信号を生成する画像制御手段を備えることを特徴とする画像投影装置。 - 請求項6または7に記載の画像投影装置において、
ユーザーが前記画像投影装置の設置姿勢に応じた投影モードを設定する投影設定手段を有し、
前記検知手段は、ユーザーが投影設定手段で設定した投影モードにより前記画像投影装置の設置姿勢を検知することを特徴とする画像投影装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015057514A JP2016177148A (ja) | 2015-03-20 | 2015-03-20 | 画像生成手段移動装置および画像投影装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015057514A JP2016177148A (ja) | 2015-03-20 | 2015-03-20 | 画像生成手段移動装置および画像投影装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2016177148A true JP2016177148A (ja) | 2016-10-06 |
Family
ID=57071292
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015057514A Pending JP2016177148A (ja) | 2015-03-20 | 2015-03-20 | 画像生成手段移動装置および画像投影装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2016177148A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018084795A (ja) * | 2016-11-11 | 2018-05-31 | 株式会社リコー | 画像生成ユニット、画像投影装置及びヒートシンク |
| JP2018146623A (ja) * | 2017-03-01 | 2018-09-20 | 株式会社リコー | 画像投影装置および画像投影装置の制御方法 |
| JP2019120721A (ja) * | 2017-12-28 | 2019-07-22 | 株式会社リコー | 画像表示装置、画像投影装置、画像表示方法、および撮像装置 |
| JP2020016864A (ja) * | 2018-07-27 | 2020-01-30 | 株式会社リコー | 画像投射装置 |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001154262A (ja) * | 1999-11-26 | 2001-06-08 | Nec Corp | プロジェクタ装置 |
| JP2002174852A (ja) * | 2000-08-30 | 2002-06-21 | Ricoh Co Ltd | 画像表示装置 |
| JP2002250970A (ja) * | 2001-02-27 | 2002-09-06 | Ricoh Co Ltd | 画像表示装置 |
| JP2003295310A (ja) * | 2002-04-01 | 2003-10-15 | Matsushita Electric Ind Co Ltd | 映像投射装置 |
| JP2005208135A (ja) * | 2004-01-20 | 2005-08-04 | Nec Viewtechnology Ltd | 傾きセンサーを備えたプロジェクタ |
| JP2005208136A (ja) * | 2004-01-20 | 2005-08-04 | Casio Comput Co Ltd | 投影装置、投影方法及びプログラム |
| JP2012133190A (ja) * | 2010-12-22 | 2012-07-12 | Seiko Epson Corp | プロジェクター、プロジェクションシステム、及びプロジェクターの制御方法 |
| JP2012255988A (ja) * | 2011-06-10 | 2012-12-27 | Panasonic Corp | 画像投影装置およびこれを備えた携帯型情報処理装置 |
| JP2014134729A (ja) * | 2013-01-11 | 2014-07-24 | Canon Inc | 投影装置、その制御方法、及びプログラム |
| JP2015060080A (ja) * | 2013-09-19 | 2015-03-30 | パナソニック株式会社 | 投写型映像表示装置および表示システム |
-
2015
- 2015-03-20 JP JP2015057514A patent/JP2016177148A/ja active Pending
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001154262A (ja) * | 1999-11-26 | 2001-06-08 | Nec Corp | プロジェクタ装置 |
| JP2002174852A (ja) * | 2000-08-30 | 2002-06-21 | Ricoh Co Ltd | 画像表示装置 |
| JP2002250970A (ja) * | 2001-02-27 | 2002-09-06 | Ricoh Co Ltd | 画像表示装置 |
| JP2003295310A (ja) * | 2002-04-01 | 2003-10-15 | Matsushita Electric Ind Co Ltd | 映像投射装置 |
| JP2005208135A (ja) * | 2004-01-20 | 2005-08-04 | Nec Viewtechnology Ltd | 傾きセンサーを備えたプロジェクタ |
| JP2005208136A (ja) * | 2004-01-20 | 2005-08-04 | Casio Comput Co Ltd | 投影装置、投影方法及びプログラム |
| JP2012133190A (ja) * | 2010-12-22 | 2012-07-12 | Seiko Epson Corp | プロジェクター、プロジェクションシステム、及びプロジェクターの制御方法 |
| JP2012255988A (ja) * | 2011-06-10 | 2012-12-27 | Panasonic Corp | 画像投影装置およびこれを備えた携帯型情報処理装置 |
| JP2014134729A (ja) * | 2013-01-11 | 2014-07-24 | Canon Inc | 投影装置、その制御方法、及びプログラム |
| JP2015060080A (ja) * | 2013-09-19 | 2015-03-30 | パナソニック株式会社 | 投写型映像表示装置および表示システム |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018084795A (ja) * | 2016-11-11 | 2018-05-31 | 株式会社リコー | 画像生成ユニット、画像投影装置及びヒートシンク |
| JP2018146623A (ja) * | 2017-03-01 | 2018-09-20 | 株式会社リコー | 画像投影装置および画像投影装置の制御方法 |
| JP2019120721A (ja) * | 2017-12-28 | 2019-07-22 | 株式会社リコー | 画像表示装置、画像投影装置、画像表示方法、および撮像装置 |
| JP6992508B2 (ja) | 2017-12-28 | 2022-01-13 | 株式会社リコー | 画像表示装置、画像投影装置、画像表示方法、および撮像装置 |
| JP2020016864A (ja) * | 2018-07-27 | 2020-01-30 | 株式会社リコー | 画像投射装置 |
| JP7099133B2 (ja) | 2018-07-27 | 2022-07-12 | 株式会社リコー | 画像投射装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6428155B2 (ja) | 画像投影装置及び画像生成装置 | |
| US9952486B2 (en) | High resolution image projection apparatus with horizontally actuated image generation unit | |
| US9864262B2 (en) | Image projection device and image projection method to control an illumination area based on movement of image generating unit | |
| JP2016102945A (ja) | 画像投射装置、画像投射方法およびプログラム | |
| JP2016102946A (ja) | 画像投射装置、画像投射方法およびプログラム | |
| JP6662127B2 (ja) | 画像生成ユニット及び画像投影装置 | |
| US9787956B2 (en) | Image projection apparatus | |
| JP2016177148A (ja) | 画像生成手段移動装置および画像投影装置 | |
| JP6828370B2 (ja) | 画像生成装置及び画像投影装置 | |
| US9778551B2 (en) | Illumination optical system, optical engine, and image projection apparatus | |
| JP6790433B2 (ja) | 照明光学系、光学エンジン及び画像投影装置 | |
| JP6547480B2 (ja) | 画像投影装置及び画像投影方法 | |
| JP6724519B2 (ja) | 画像生成ユニット及び画像投影装置 | |
| JP7099133B2 (ja) | 画像投射装置 | |
| JP7003726B2 (ja) | 画像投射装置、及びプログラム | |
| JP2016081008A (ja) | 画像投影装置及び投影面状態検出方法 | |
| JP2017134122A (ja) | 画像生成装置及び画像投影装置 | |
| JP2017129678A (ja) | 画像投影装置及び画像投影方法 | |
| JP2017129677A (ja) | 画像投影装置及び画像投影方法 | |
| JP2017021291A (ja) | 画像投影装置 | |
| JP2017009665A (ja) | 画像投影装置 | |
| JP6493056B2 (ja) | 画像投影装置 | |
| JP2017009677A (ja) | 画像投影装置及び画像投影装置の制御方法 | |
| JP2019109354A (ja) | 画像投影装置、および画像投影方法 | |
| JP2017021394A (ja) | 画像投影システム、画像投影装置及び画像投影方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180208 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20181129 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20181207 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20190607 |