JP2016161973A - 認識装置、認識方法及びプログラム - Google Patents
認識装置、認識方法及びプログラム Download PDFInfo
- Publication number
- JP2016161973A JP2016161973A JP2015037178A JP2015037178A JP2016161973A JP 2016161973 A JP2016161973 A JP 2016161973A JP 2015037178 A JP2015037178 A JP 2015037178A JP 2015037178 A JP2015037178 A JP 2015037178A JP 2016161973 A JP2016161973 A JP 2016161973A
- Authority
- JP
- Japan
- Prior art keywords
- recognition
- signal
- pixel
- region
- recognizing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images















Landscapes
- Traffic Control Systems (AREA)
- Image Analysis (AREA)
Abstract
【課題】撮像環境によらずに撮像された画像から信号機の信号をより正確に認識できる認識装置、認識方法及びプログラムを提供することを目的とする。
【解決手段】実施形態の認識装置は、車両の周囲の画像データを取得するカメラと、車両の周囲の明るさを示す明るさデータを取得するセンサと、画像データから、明るさデータに基づいて異なる認識対象領域を認識する第1の認識部と、信号機の信号を示す領域を認識対象領域に基づいて認識する第2の認識部と、を備える。
【選択図】図2
【解決手段】実施形態の認識装置は、車両の周囲の画像データを取得するカメラと、車両の周囲の明るさを示す明るさデータを取得するセンサと、画像データから、明るさデータに基づいて異なる認識対象領域を認識する第1の認識部と、信号機の信号を示す領域を認識対象領域に基づいて認識する第2の認識部と、を備える。
【選択図】図2
Description
本発明は認識装置、認識方法及びプログラムに関する。
車載カメラを利用して、運転者を支援したり、事故発生時の映像を記憶したりする技術が従来から知られている。例えば車載カメラを利用した運転者支援技術には、障害物の回避又は衝突時の衝撃を軽減する自動ブレーキ機能、及び、先行車両との車間距離の維持等を警告する警報機能等がある。
また例えば特許文献1には、信号機の信号の色と、信号の形状と、を同じ被写体が撮影された2枚の画像から別々に認識することにより、精度良く画像から信号機の信号を認識する発明が開示されている。
しかしながら従来の技術では、精度良く画像から信号機の信号を認識するために、認識装置に入力する画像のフレームレートを低下させる必要があったり、カメラのゲイン(感度)を、信号機の信号を正確に認識するように調整したりする必要があった。またカメラのゲインを、信号機の信号を正確に認識するように調整することが難しかった。
例えば夜間に信号機の信号を撮影する場合、露光量の不足のため、車載カメラのセンサのゲインを上げると、信号機の信号を示す領域は元々明るいので、色を失って白く飽和する。またカメラセンサーの光漏れによりフレアが発生する。例えば青信号の場合、周辺に藍色の領域が広がる。そのため信号の色を用いて信号を検知する方法を、昼間と同様に適用できなくなる。また信号の形状のみで信号を検知すると、対向車のライト及び街灯の光等を、信号機の信号と誤認識する問題が発生する。
本発明は、上記に鑑みてなされたものであって、撮像環境によらずに撮像された画像から信号機の信号をより正確に認識できる認識装置、認識方法及びプログラムを提供することを目的とする。
上述した課題を解決し、目的を達成するために、本発明は、車両の周囲の画像データを取得するカメラと、前記車両の周囲の明るさを示す明るさデータを取得するセンサと、前記画像データから、前記明るさデータに基づいて異なる認識対象領域を認識する第1の認識部と、信号機の信号を示す領域を前記認識対象領域に基づいて認識する第2の認識部と、を備える。
本発明によれば、撮像環境によらずに撮像された画像から信号機の信号を正確に認識することができるという効果を奏する。
以下に添付図面を参照して、認識装置、認識方法及びプログラムの実施形態を詳細に説明する。
図1は実施形態の認識装置100が搭載された車両200の例を示す図である。実施形態の認識装置100は、車両200のフロントガラスのバックミラー付近に設置される。実施形態の認識装置100は、車両200の周囲の明るさに基づく画像認識処理により、信号機300の信号を認識する。
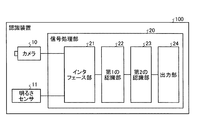
図2は実施形態の認識装置100の構成の例を示す図である。実施形態の認識装置100は、カメラ10、明るさセンサ11及び信号処理部20を備える。信号処理部20は、インタフェース部21、第1の認識部22、第2の認識部23及び出力部24を備える。
カメラ10は車両200の周囲を撮影し、(R,G,B)色空間により表現されたカラーの画像データを取得する。カメラ10は当該画像データをインタフェース部21に入力する。
明るさセンサ11は車両200の周囲の明るさを示す明るさデータを取得し、当該明るさデータをインタフェース部21に入力する。
インタフェース部21は、カメラ10から画像データを受け付けると、当該画像データを、第1の認識部22が時系列の連続画像フレームとして受け付け可能なデータ形式に変換する。インタフェース部21はデータ形式が変換された画像データを第1の認識部22に入力する。
またインタフェース部21は、明るさセンサ11から明るさデータを受け付けると、当該明るさデータを第1の認識部22に入力する。
第1の認識部22は、インタフェース部21から画像データ及び明るさデータを受け付けると、当該明るさデータに基づく画像認識処理により、当該画像データから信号機300の信号を認識する。
ここで車両200の周囲の明るさに応じた信号機300の信号の見え方について説明する。なお信号機300の信号が青信号、黄信号及び赤信号の場合の説明は同様なので、実施形態の説明では、信号が青信号である場合を例にして説明するが、認識対象の信号の色は任意でよい。
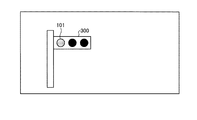
図3は昼間に撮影された信号機300の例を示す図である。図3の例は、信号機300が青信号である場合に撮影された画像データの例であり、信号機300の青信号を示す領域101を含む。
一方、図4は夜間に撮影された信号機300の例を示す図である。図4の例は、信号機300が青信号である場合に撮影された画像データの例であり、信号機300の青信号を示す領域101と、青信号の拡散光を示す領域111と、を含む。夜間は、信号機300の周囲が暗いため、昼間よりも青信号の光が周囲に広がり易い。そのため図4の例では、青信号を示す領域101の周囲に青信号の拡散光を示す領域111が形成される。
図2に戻り、第1の認識部22が信号機300の信号を示す信号画素領域を認識する信号認識処理について具体的に説明する。まず第1の認識部22は、(R,G,B)色空間の画像データを、次式(1)を使用して、(Y,U,V)色空間の画像データに変換する。

次に第1の認識部22は、明るさデータが閾値(第1の閾値)以上の場合、第1の認識辞書を使用して画像認識処理を行い、明るさデータが閾値未満である場合、第2の認識辞書を使用して画像認識処理を行う。
<第1の認識辞書が使用される場合>
第1の認識辞書は、屋外にある信号機300を昼間に撮影した場合等、周囲が明るい状況で撮影された画像に含まれる青信号画素と、周囲が明るい状況で撮影された画像に含まれる非青信号画素と、から学習された辞書である。青信号画素は、青信号を示す画素である。非青信号画素は、青信号でない被写体を示す画素である。ここで第1の認識辞書の学習方法の例について説明する。
第1の認識辞書は、屋外にある信号機300を昼間に撮影した場合等、周囲が明るい状況で撮影された画像に含まれる青信号画素と、周囲が明るい状況で撮影された画像に含まれる非青信号画素と、から学習された辞書である。青信号画素は、青信号を示す画素である。非青信号画素は、青信号でない被写体を示す画素である。ここで第1の認識辞書の学習方法の例について説明する。
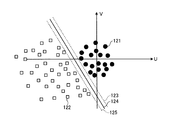
図5は昼間に撮影された画像に含まれる青信号画素121の(U,V)分布の例を示す図である。図6は車両200の周囲の明るさデータが閾値以上のときに使用される実施形態の第1の認識辞書の学習方法の例を示す図である。第1の認識辞書は、例えばSVM(support vector machine)等の機械学習法により学習される。SVMにより学習する場合、点線123と直線124との距離(マージン)と、直線124と点線125との距離と、が最大になるようにして直線124を決定する。
このように決定された直線124により青信号画素121と、非青信号画素122と、が類別される。具体的には、第1の認識辞書として、次式(2)の評価関数のパラメータa1,b1及びc1が算出される。
f1(U,V)=a1×U+b1×V+c1 ・・・(2)
第1の認識部22は、(Y,U,V)色空間の画像データの各(U,V)について、f1(U,V)が、閾値(第2の閾値)以上である場合、当該(U,V)を青信号画素として認識し、閾値未満である場合、当該(U,V)を非青信号画素であると認識する。
図7は車両200の周囲の明るさデータが閾値以上のときに認識される実施形態の青信号画素の領域102の例を示す図である。図7の青信号画素の領域102の大きさは、実際の青信号を示す領域101の大きさよりも小さい。すなわち図7の例は、本来、青信号の領域として認識されるべき領域が、ノイズ画素の影響により青信号画素として認識されなかった場合を示す。ノイズ画素は、撮影時の周囲の状況に起因するノイズ画素、撮像素子の特性に起因するノイズ画素、及び、撮像素子表面に付着したゴミに起因するノイズ画素等である。撮影時の周囲の状態に起因するノイズ画素は、カメラ10により信号機300が撮影された際に、例えば太陽光等の光により反射していた青信号の領域の画素である。撮像素子の特性に起因するノイズ画素は、例えばランダムノイズの影響を受けた画素である。
図2に戻り、次に第1の認識部22は、明るさデータが閾値以上の場合、青信号画素の領域102を、認識対象領域として第2の認識部23に入力する。
第2の認識部23は、第1の認識部22から青信号画素の領域102を認識対象領域として受け付けると、青信号画素の領域102を膨張させる膨張処理を行う。具体的には、第2の認識部23は青信号画素の領域102の画素毎に、当該画素を複数の画素により被覆することにより、青信号画素の領域102を青信号画素の膨張領域に膨張させる。第2の認識部23は、例えばn×n(nは1以上の整数)のブロック画素により各画素を被覆する。例えばn=7の場合、青信号画素の領域102の各画素を、当該画素の周囲の48個(7×7−1)の画素を更に含む青信号画素の膨張領域に膨張させる。
図8は車両200の周囲の明るさデータが閾値以上のときの実施形態の青信号画素の膨張領域103の例を示す図である。図8の例は、第2の認識部23が、第1の認識部22により認識された青信号画素の領域102に、膨張処理を行ったことにより、本来の青信号を示す領域101を含む青信号画素の膨張領域103が得られた場合を示す。
図2に戻り、次に第2の認識部23は青信号を示す領域101の形状を認識する形状認識処理を行う。具体的には、第2の認識部23は、第1の認識部22により認識された青信号画素の領域102をハフ(Hough)変換することにより、青信号画素の膨張領域103内で円形の画素領域を認識できるか否かを判定する。円形の画素領域を認識できる場合、第2の認識部23は当該円形の画素領域が信号機300の青信号を示す領域101であることを認識する。
図9は車両200の周囲の明るさデータが閾値以上のときに実施形態のハフ変換により認識される円形の画素領域の例を示す図である。図9の例は、青信号画素の領域102(図7参照)がハフ変換されることにより、円形の画素領域として青信号を示す領域101が認識された場合の例を示す。
図10は車両200の周囲の明るさデータが閾値以上のときに認識される実施形態の矩形領域104の例を示す図である。図10の例は、円形の画素領域として認識された青信号を示す領域101に外接する矩形領域104が認識された場合の例を示す。
図11は車両200の周囲の明るさデータが閾値以上のときに撮影された画像データに含まれる実施形態の青信号の認識結果の例を示す図である。図11の例は、図3に示す画像データに含まれる信号機300の青信号が、当該青信号を示す領域101を含む矩形領域104として認識された場合を示す。
<第2の認識辞書が使用される場合>
第2の認識辞書は、屋外にある信号機300を夜間に撮影した場合等、周囲が暗い状況で撮影された画像に含まれる青信号の拡散光画素と、周囲が暗い状況で撮影された画像に含まれる非拡散光画素と、から学習された辞書である。拡散光画素は、信号機300の青信号の光が拡散することにより生じた拡散光を示す画素である。非拡散光画素は、青信号の拡散光でない被写体を示す画素である。
第2の認識辞書は、屋外にある信号機300を夜間に撮影した場合等、周囲が暗い状況で撮影された画像に含まれる青信号の拡散光画素と、周囲が暗い状況で撮影された画像に含まれる非拡散光画素と、から学習された辞書である。拡散光画素は、信号機300の青信号の光が拡散することにより生じた拡散光を示す画素である。非拡散光画素は、青信号の拡散光でない被写体を示す画素である。
図12は夜間に撮影された画像に含まれる青信号の拡散光画素の(U,V)分布の例を示す図である。図13は車両200の周囲の明るさデータが閾値未満のときに使用される実施形態の第2の認識辞書の学習方法の例を示す図である。第2の認識辞書は、例えばSVM(support vector machine)等の機械学習法により学習される。SVMにより学習する場合、点線133と直線134との距離(マージン)と、直線134と点線135との距離と、が最大になるようにして直線134を決定する。この直線134により青信号の拡散光画素131と、青信号の非拡散光画素132と、が類別される。
このように決定された直線134により拡散光画素131と、非拡散光画素132と、が類別される。具体的には、第2の認識辞書として、次式(3)の評価関数のパラメータa2,b2及びc2が算出される。
f2(U,V)=a2×U+b2×V+c2 ・・・(3)
第1の認識部22は、(Y,U,V)色空間の画像データの各(U,V)について、f2(U,V)が、閾値(第3の閾値)以上である場合、当該(U,V)を拡散光画素として認識し、閾値未満である場合、当該(U,V)を非拡散光画素であると認識する。
図14は車両200の周囲の明るさデータが閾値未満のときに認識される実施形態の青信号の拡散光画素の領域112の例を示す図である。青信号の拡散光画素の領域112は、青信号の光が周囲に拡散することにより生じる拡散光を示す画素の領域である。また青信号の拡散光画素の領域112は、飽和した青信号画素の領域113を囲むようにして生じる。また飽和した青信号画素の領域113は、本来の青信号を示す領域101よりも大きい。
図2に戻り、次に第1の認識部22は、明るさデータが閾値未満の場合、青信号の拡散光画素の領域112を、認識対象領域として第2の認識部23に入力する。
第2の認識部23は、第1の認識部22から青信号の拡散光画素の領域112を認識対象領域として受け付けると、青信号の拡散光画素の領域112を膨張させる膨張処理を行う。具体的には、第2の認識部23は青信号の拡散光画素の領域112の画素毎に、当該画素を複数の画素により被覆することにより、青信号の拡散光画素の領域112を青信号の拡散光画素の膨張領域に膨張させる。第2の認識部23は、例えばn×n(nは1以上の整数)のブロック画素により各画素を被覆する。例えばn=7の場合、青信号の拡散光画素の領域112の各画素を、当該画素の周囲の48個(7×7−1)の画素を更に含む青信号の拡散光画素の膨張領域に膨張させる。言い換えると、青信号の拡散光画素の膨張領域させることにより、飽和した青信号画素の領域113を収縮させ、飽和した青信号画素の領域113を、本来の青信号を示す領域101の大きさに近づける。
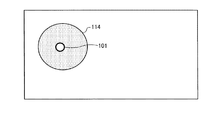
図15は車両200の周囲の明るさデータが閾値未満のときの実施形態の青信号の拡散光画素の膨張領域114の例を示す図である。図15の例は、第2の認識部23が、第1の認識部22により認識された青信号の拡散光画素の領域112に、膨張処理を行ったことにより、飽和した青信号画素の収縮領域115を囲む青信号の拡散光画素の膨張領域114が得られた場合を示す。
図2に戻り、次に第2の認識部23は青信号を示す領域101の形状を認識する形状認識処理を行う。具体的には、第2の認識部23は、第1の認識部22により認識された飽和した青信号画素の収縮領域115をハフ変換することにより、飽和した青信号画素の収縮領域115内で円形の画素領域を認識できるか否かを判定する。円形の画素領域を認識できる場合、第2の認識部23は当該円形の画素領域が信号機300の青信号を示す領域101であることを認識する。
図16は車両200の周囲の明るさデータが閾値未満のときに実施形態のハフ変換により認識される円形の画素領域の例を示す図である。図16の例は、飽和した青信号画素の収縮領域115(図15参照)がハフ変換されることにより、円形の画素領域として青信号を示す領域101が認識された場合の例を示す。
図17は車両200の周囲の明るさデータが閾値未満のときに撮影された画像データに含まれる実施形態の青信号の認識結果の例を示す図である。図17の例は、図4に示す画像データに含まれる信号機300の青信号が、当該青信号を示す領域101を含む矩形領域104として認識された場合を示す。
図2に戻り、第2の認識部23は、青信号を示す領域101を含む矩形領域104を示す認識データを出力部24に入力する。出力部24は、第2の認識部23から認識データを受け付けると、当該認識データを出力する。認識データは、例えばドライバーによる信号無視及び急発進等の危険運転の検知等の処理に使用される。
次に実施形態の認識方法について説明する。
図18は実施形態の認識方法の例を示すフローチャートである。なお信号機300の信号が青信号、黄信号及び赤信号の場合の説明は同様なので、実施形態の認識方法の説明では、信号が青信号である場合を例にして説明するが、認識対象の信号の色は任意でよい。
はじめに、第1の認識部22が、(R,G,B)色空間により表現されたカラーの画像データを、インタフェース部21から受け付ける(ステップS1)。次に、第1の認識部22が、(R,G,B)色空間の画像データを、上述の式(1)を使用して、(Y,U,V)色空間の画像データに変換する(ステップS2)。
また、第1の認識部22が、インタフェース部21から明るさデータを受け付ける(ステップS3)。第1の認識部22が、明るさデータが閾値以上であるか否かを判定する(ステップS4)。
明るさデータが閾値以上の場合(ステップS4、Yes)、第1の認識部22が、第1の認識辞書として、上述の式(2)の評価関数を選択する(ステップS5)。次に、第1の認識部22が、ステップS5で選択された評価関数を使用して、青信号画素の領域102を、認識対象領域として認識する(ステップS6)。次に、第2の認識部23が、ステップS6で認識された青信号画素の領域102を膨張させる(ステップS7)。
次に、第2の認識部23が、ステップS7の処理により得られた青信号画素の膨張領域103から青信号を示す領域101の形状を認識する(ステップS8)。具体的には、第2の認識部23が、第1の認識部22により認識された青信号画素の領域102をハフ変換することにより、青信号画素の膨張領域103内で円形の画素領域を認識できるか否かを判定する。円形の画素領域を認識できる場合、第2の認識部23は当該円形の画素領域が信号機300の青信号を示す領域101であることを認識する。
明るさデータが閾値未満の場合(ステップS4、No)、第1の認識部22が、第2の認識辞書として、上述の式(3)の評価関数を選択する(ステップS9)。次に、第1の認識部22が、ステップS9で選択された評価関数を使用して、青信号の拡散光画素の領域112を、認識対象領域として認識する(ステップS10)。次に、第2の認識部23が、ステップS10で認識された青信号の拡散光画素の領域112を膨張させる(ステップS11)。
次に、第2の認識部23が、ステップS11の処理により得られた青信号の拡散光画素の膨張領域114に囲まれる領域(飽和した青信号画素の収縮領域115)から、青信号を示す領域101の形状を認識する(ステップS12)。具体的には、第2の認識部23は、第1の認識部22により認識された飽和した青信号画素の収縮領域115をハフ変換することにより、飽和した青信号画素の収縮領域115内で円形の画素領域を認識できるか否かを判定する。円形の画素領域を認識できる場合、第2の認識部23は当該円形の画素領域が信号機300の青信号を示す領域であることを認識する。
次に、出力部24が、青信号を示す領域101を含む矩形領域104を認識データとして出力する(ステップS13)。
次に実施形態の認識装置100のハードウェア構成について説明する。
まずカメラ10のハードウェア構成について説明する。
図19は実施形態のカメラ10のハードウェア構成の例を示す図である。実施形態のカメラ10は、撮影光学系201、メカシャッタ202、モータドライバ203、CCD(Charge Coupled Device)204、CDS(Correlated Double Sampling:相関2重サンプリング)回路205、A/D変換器206、タイミング信号発生器207、画像処理回路208、LCD(Liquid Crystal Display)209、CPU(Central Processing Unit)210、RAM(Random Access Memory)211、ROM(Read Only Memory)212、SDRAM(Synchronous Dynamic Random Access Memory)213、圧縮伸張回路214、メモリ215、操作部216及び出力I/F217を備える。
画像処理回路208、CPU210、RAM211、ROM212、SDRAM213、圧縮伸張回路214、メモリ215、操作部216及び出力I/F217はバス220を介して接続されている。
撮影光学系201は被写体が反射した光を集光する。メカシャッタ202は所定の時間、開くことにより、撮影光学系201により集光された光をCCD204に入射させる。モータドライバ203は撮影光学系201及びメカシャッタ202を駆動する。
CCD204は、メカシャッタ202を介して入射した光を被写体の像として結像し、当該被写体の像を示すアナログの画像データをCDS回路205に入力する。CDS回路205は、CCD204からアナログの画像データを受け付けると、当該画像データのノイズ成分を除去し、ノイズ成分が除去されたアナログの画像データをA/D変換器206に入力する。A/D変換器206は、CDS回路205からアナログの画像データを受け付けると、当該アナログの画像データをデジタルの画像データに変換する。A/D変換器206はデジタルの画像データを画像処理回路208に入力する。タイミング信号発生器207は、CPU210からの制御信号に応じて、CCD204、CDS回路205及びA/D変換器206にタイミング信号を送信することにより、CCD204、CDS回路205及びA/D変換器206が動作するタイミングを制御する。
画像処理回路208は、A/D変換器206からデジタルの画像データを受け付けると、SDRAM213を使用して、当該デジタルの画像データの画像処理を行う。画像処理は、例えばCrCb変換処理、ホワイトバランス制御処理、コントラスト補正処理、エッジ強調処理及び色変換処理等である。ホワイトバランス処理は、画像データの色の濃さを調整する画像処理である。コントラスト補正処理は、画像データのコントラストを調整する画像処理である。エッジ強調処理は、画像データのシャープネスを調整する処理である。色変換処理は、画像データの色合いを調整する画像処理である。
画像処理回路208は上述の画像処理が行われた画像データをLCD209、又は、圧縮伸張回路214に入力する。LCD209は、画像処理回路208から受け付けた画像データを表示する液晶ディスプレイである。
CPU210はプログラムを実行することによりカメラ10の動作を制御する。RAM211はCPU210がプログラムを実行するときのワーク領域、及び、各種データの記憶等に使用される読取及び書込が可能な記憶領域である。ROM212はCPU210により実行されるプログラム等を記憶する読取専用の記憶領域である。
SDRAM213は画像処理回路208が画像処理を行うときに、画像処理対象の画像データを一時的に記憶する記憶領域である。
圧縮伸張回路214は、画像処理回路208から画像データを受け付けると、当該画像データを圧縮する。圧縮伸張回路214は圧縮された画像データをメモリ215に記憶する。また圧縮伸張回路214は、メモリ215から画像データを受け付けると、当該画像データを伸張する。圧縮伸張回路214は伸張された画像データをSDRAM213に一時的に記憶する。メモリ215は圧縮された画像データを記憶する。
操作部216はカメラ10のユーザからの操作を受け付ける。操作部216は、例えばLCD209に表示された画像データをメモリ215に記憶する操作を受け付ける。出力I/F217は、カメラ10から画像データを信号処理部20に送信するためのインタフェースである。
なお上述の図2で説明した信号処理部20のインタフェース部21、第1の認識部22、第2の認識部23及び出力部24は、信号処理ボード(信号処理回路)としてハードウェアにより実現しても、カメラ10のCPU210により実行されるソフトウェア(プログラム)により実現してもよい。
実施形態の認識装置100(CPU210)で実行されるプログラムは、インストール可能な形式又は実行可能な形式のファイルでCD−ROM、メモリカード、CD−R及びDVD(Digital Versatile Disk)等のコンピュータで読み取り可能な記憶媒体に記録されてコンピュータ・プログラム・プロダクトとして提供される。
なお実施形態の認識装置100で実行されるプログラムを、インターネット等のネットワークに接続されたコンピュータ上に格納し、ネットワーク経由でダウンロードさせることにより提供するように構成してもよい。また実施形態の認識装置100で実行されるプログラムをダウンロードさせずにインターネット等のネットワーク経由で提供するように構成してもよい。
また実施形態の認識装置100のプログラムを、ROM212等に予め組み込んで提供するように構成してもよい。
なお実施形態の認識装置100で実行されるプログラムにより、インタフェース部21、第1の認識部22、第2の認識部23及び出力部24等を実現する場合、インタフェース部21、第1の認識部22、第2の認識部23及び出力部24等は、CPU210がROM212又は上記記憶媒体等からプログラムを読み出して実行することによりRAM211に実現される。
以上説明したように、実施形態の認識装置100では、第1の認識部22が、画像データから、車両200の周囲の明るさデータに基づいて異なる認識対象領域(例えば青信号の場合、青信号画素の領域102、又は、青信号の拡散光画素の領域112)を認識する。そして第2の認識部23が、信号機300の信号を示す領域を認識対象領域に基づいて認識する。これにより撮像環境によらずに撮像された画像から信号機300の信号をより正確に認識できる。例えばカメラ10のゲインを信号機300の信号を認識するために特別に調整することなく、昼夜問わずに、撮像された1枚の画像から信号機300の信号を正確に認識することができる。
10 カメラ
11 明るさセンサ
20 信号処理部
21 インタフェース部
22 第1の認識部
23 第2の認識部
24 出力部
100 認識装置
101 青信号を示す領域
102 青信号画素の領域
103 青信号画素の膨張領域
104 矩形領域
111 青信号の拡散光を示す領域
112 青信号の拡散光画素の領域
113 飽和した青信号画素の領域
114 青信号の拡散光画素の膨張領域
115 飽和した青信号画素の収縮領域
200 車両
201 撮影光学系
202 メカシャッタ
203 モータドライバ
204 CCD
205 CDS回路
206 A/D変換器
207 タイミング信号発生器
208 画像処理回路
209 LCD
210 CPU
211 RAM
212 ROM
213 SDRAM
214 圧縮伸張回路
215 メモリ
216 操作部
217 出力I/F
220 バス
300 信号機
11 明るさセンサ
20 信号処理部
21 インタフェース部
22 第1の認識部
23 第2の認識部
24 出力部
100 認識装置
101 青信号を示す領域
102 青信号画素の領域
103 青信号画素の膨張領域
104 矩形領域
111 青信号の拡散光を示す領域
112 青信号の拡散光画素の領域
113 飽和した青信号画素の領域
114 青信号の拡散光画素の膨張領域
115 飽和した青信号画素の収縮領域
200 車両
201 撮影光学系
202 メカシャッタ
203 モータドライバ
204 CCD
205 CDS回路
206 A/D変換器
207 タイミング信号発生器
208 画像処理回路
209 LCD
210 CPU
211 RAM
212 ROM
213 SDRAM
214 圧縮伸張回路
215 メモリ
216 操作部
217 出力I/F
220 バス
300 信号機
Claims (8)
- 車両の周囲の画像データを取得するカメラと、
前記車両の周囲の明るさを示す明るさデータを取得するセンサと、
前記画像データから、前記明るさデータに基づいて異なる認識対象領域を認識する第1の認識部と、
信号機の信号を示す領域を前記認識対象領域に基づいて認識する第2の認識部と、
を備える認識装置。 - 前記第1の認識部は、前記明るさデータが閾値以上の場合、信号機の信号を示す信号画素と、前記信号画素でない非信号画素と、から学習された第1の認識辞書を使用して、前記認識対象領域を認識する、
請求項1に記載の認識装置。 - 前記第1の認識部は、前記明るさデータが閾値以上の場合、前記認識対象領域を前記信号画素の領域として認識し、
前記第2の認識部は、前記信号画素を複数の画素により被覆することにより、前記信号画素の領域を信号画素の膨張領域に膨張させ、前記信号画素の膨張領域をハフ変換することにより得られた画素領域を前記信号機の信号の形状として認識する、
請求項2に記載の認識装置。 - 前記第1の認識部は、前記明るさデータが閾値未満の場合、前記信号機の信号の光が拡散することにより生じた拡散光を示す拡散光画素と、前記拡散光画素でない非拡散光画素と、から学習された第2の認識辞書を使用して、前記認識対象領域を認識する、
請求項2に記載の認識装置。 - 前記第1の認識部は、前記明るさデータが閾値未満の場合、前記認識対象領域を前記拡散光画素の領域として認識し、
前記第2の認識部は、前記拡散光画素を複数の画素により被覆することにより、前記拡散光画素の領域を拡散光画素の膨張領域に膨張させ、前記拡散光画素の膨張領域に囲まれる領域をハフ変換することにより得られた画素領域を前記信号機の信号の形状として認識する、
請求項4に記載の認識装置。 - 前記カメラは、(R,G,B)色空間の前記画像データを取得し、
前記第1の認識部は、前記(R,G,B)色空間の画像データを(Y,U,V)色空間の画像データに変換し、前記(Y,U,V)色空間の画像データから、前記第1の認識辞書として算出された第1の評価関数f1(U,V)、又は、前記第2の認識辞書として算出された第2の評価関数f2(U,V)を使用して、前記認識対象領域を認識する、
請求項4に記載の認識装置。 - カメラが、車両の周囲の画像データを取得するステップと、
センサが、前記車両の周囲の明るさを示す明るさデータを取得するステップと、
第1の認識部が、前記画像データから、前記明るさデータに基づいて異なる認識対象領域を認識するステップと、
第2の認識部が、信号機の信号を示す領域を前記認識対象領域に基づいて認識するステップと、
を含む認識方法。 - 車両の周囲の画像データを取得するカメラと、前記車両の周囲の明るさを示す明るさデータを取得するセンサと、を備える認識装置を、
前記画像データから、前記明るさデータに基づいて異なる認識対象領域を認識する第1の認識部と、
信号機の信号を示す領域を前記認識対象領域に基づいて認識する第2の認識部、
として機能させるためのプログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015037178A JP2016161973A (ja) | 2015-02-26 | 2015-02-26 | 認識装置、認識方法及びプログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015037178A JP2016161973A (ja) | 2015-02-26 | 2015-02-26 | 認識装置、認識方法及びプログラム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2016161973A true JP2016161973A (ja) | 2016-09-05 |
Family
ID=56844932
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015037178A Pending JP2016161973A (ja) | 2015-02-26 | 2015-02-26 | 認識装置、認識方法及びプログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2016161973A (ja) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018041209A (ja) * | 2016-09-06 | 2018-03-15 | 本田技研工業株式会社 | 物体認識装置、モデル情報生成装置、物体認識方法、および物体認識プログラム |
| JP2018055591A (ja) * | 2016-09-30 | 2018-04-05 | 株式会社リコー | 情報処理装置、情報処理方法およびプログラム |
| JP2018072884A (ja) * | 2016-10-24 | 2018-05-10 | 株式会社リコー | 情報処理装置、情報処理方法およびプログラム |
| KR20180052803A (ko) * | 2016-11-10 | 2018-05-21 | (주)에이텍티앤 | 사고 방지를 위한 차량 후방 신호등시스템 |
| WO2018182153A1 (ko) * | 2017-03-30 | 2018-10-04 | 삼성전자 주식회사 | 입력 영상에 포함된 객체를 인식하는 디바이스 및 방법 |
| US10339399B2 (en) | 2015-11-04 | 2019-07-02 | Ricoh Company, Ltd. | Detection apparatus, detection method, and computer-readable recording medium |
| US12080077B2 (en) | 2021-07-02 | 2024-09-03 | Toyota Jidosha Kabushiki Kaisha | Signal recognizing apparatus |
| JP7548191B2 (ja) | 2021-11-01 | 2024-09-10 | トヨタ自動車株式会社 | 距離推定装置 |
-
2015
- 2015-02-26 JP JP2015037178A patent/JP2016161973A/ja active Pending
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10339399B2 (en) | 2015-11-04 | 2019-07-02 | Ricoh Company, Ltd. | Detection apparatus, detection method, and computer-readable recording medium |
| JP2018041209A (ja) * | 2016-09-06 | 2018-03-15 | 本田技研工業株式会社 | 物体認識装置、モデル情報生成装置、物体認識方法、および物体認識プログラム |
| JP2018055591A (ja) * | 2016-09-30 | 2018-04-05 | 株式会社リコー | 情報処理装置、情報処理方法およびプログラム |
| JP2018072884A (ja) * | 2016-10-24 | 2018-05-10 | 株式会社リコー | 情報処理装置、情報処理方法およびプログラム |
| KR20180052803A (ko) * | 2016-11-10 | 2018-05-21 | (주)에이텍티앤 | 사고 방지를 위한 차량 후방 신호등시스템 |
| WO2018182153A1 (ko) * | 2017-03-30 | 2018-10-04 | 삼성전자 주식회사 | 입력 영상에 포함된 객체를 인식하는 디바이스 및 방법 |
| US11176387B2 (en) | 2017-03-30 | 2021-11-16 | Samsung Electronics Co., Ltd | Device and method for recognizing object included in input image |
| US12080077B2 (en) | 2021-07-02 | 2024-09-03 | Toyota Jidosha Kabushiki Kaisha | Signal recognizing apparatus |
| JP7567689B2 (ja) | 2021-07-02 | 2024-10-16 | トヨタ自動車株式会社 | 信号認識装置 |
| JP7548191B2 (ja) | 2021-11-01 | 2024-09-10 | トヨタ自動車株式会社 | 距離推定装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2016161973A (ja) | 認識装置、認識方法及びプログラム | |
| JP7140580B2 (ja) | ステレオ撮像装置 | |
| JP6459443B2 (ja) | 検知装置、検知システム、検知方法及びプログラム | |
| US8767074B2 (en) | System and method of assisting visibility of driver | |
| EP1528797A2 (en) | Image processing apparatus, image-taking system and image processing method | |
| JP5071198B2 (ja) | 信号機認識装置,信号機認識方法および信号機認識プログラム | |
| JP6728634B2 (ja) | 検知装置、検知方法及びプログラム | |
| US20170228606A1 (en) | Information processing apparatus, information processing method, and recording medium | |
| JP5895448B2 (ja) | 車両認識装置、車両認識方法、プログラム | |
| US11172173B2 (en) | Image processing device, image processing method, program, and imaging device | |
| KR20120008519A (ko) | 감시장치 | |
| JP4250506B2 (ja) | 画像処理方法、画像処理装置、画像処理プログラムおよび撮像システム | |
| JP6939919B2 (ja) | 認識装置、認識方法及びプログラム | |
| US10063827B2 (en) | Image processing apparatus, imaging apparatus, image processing program, and image processing method | |
| JP2017174380A (ja) | 認識装置、物体の認識方法、プログラム、及び、記憶媒体 | |
| JP6676885B2 (ja) | 認識装置、認識方法及びプログラム | |
| JP4457077B2 (ja) | 障害物検出システム、及び障害物検出方法 | |
| WO2022249562A1 (ja) | 信号処理装置および方法、並びにプログラム | |
| JP6825299B2 (ja) | 情報処理装置、情報処理方法およびプログラム | |
| JP6874315B2 (ja) | 情報処理装置、情報処理方法およびプログラム | |
| JP6859659B2 (ja) | 情報処理装置、情報処理方法およびプログラム | |
| JP2008286943A (ja) | 画像表示装置 | |
| JP4747670B2 (ja) | 画像処理装置 | |
| JP2010219862A (ja) | 顔検出装置及び撮像装置 | |
| JP6733279B2 (ja) | 情報処理装置、情報処理方法、および情報処理プログラム |